3.1. General Results: Key Geometrical, Aerodynamic and Performance Parameters
This section is dedicated to the analysis of the key technical parameters. For every parameter, the results are initially presented for all UAVs alike, followed by the NATO categories and regional classifications. More specifically, in the first charts of
Section 3.1, the technical parameters of wingspan and weights are discussed, along with the critical weight design ratios. Concerning the latter, the fundamental relation shown in Equation (7) is used as a reference point [
19,
33].
Note that W
0 stands for GTOW, the ratios
Wf/
W0 and
We/
W0 for the fuel and empty weight fractions and
Wcrew is the crew weight that in UAV design is, by definition, set to zero. Correlations regarding the payload weight and empty weight are investigated. Moreover, the empty weight ratio (
We/
W0) is also analyzed as one of the most critical parameters that need to be estimated during conceptual design [
19]. The analysis of the fuel weight ratio, however, is not as straightforward, since a common UAV operator strategy is to exchange between payload (for maximum effectiveness and/or sensing) and fuel (for maximum flight time), depending on the mission. Therefore, the approach of [
24] is employed, and the parameter of
Wp · E is discussed, where E stands for endurance (flight time). Finally, the cruise speed and service ceiling parameters are also plotted as a function of GTOW. Note that, as mentioned in
Section 2.4, the authors opted to use dot plots to highlight the large sample dispersion and to provide as much information to the reader as possible.
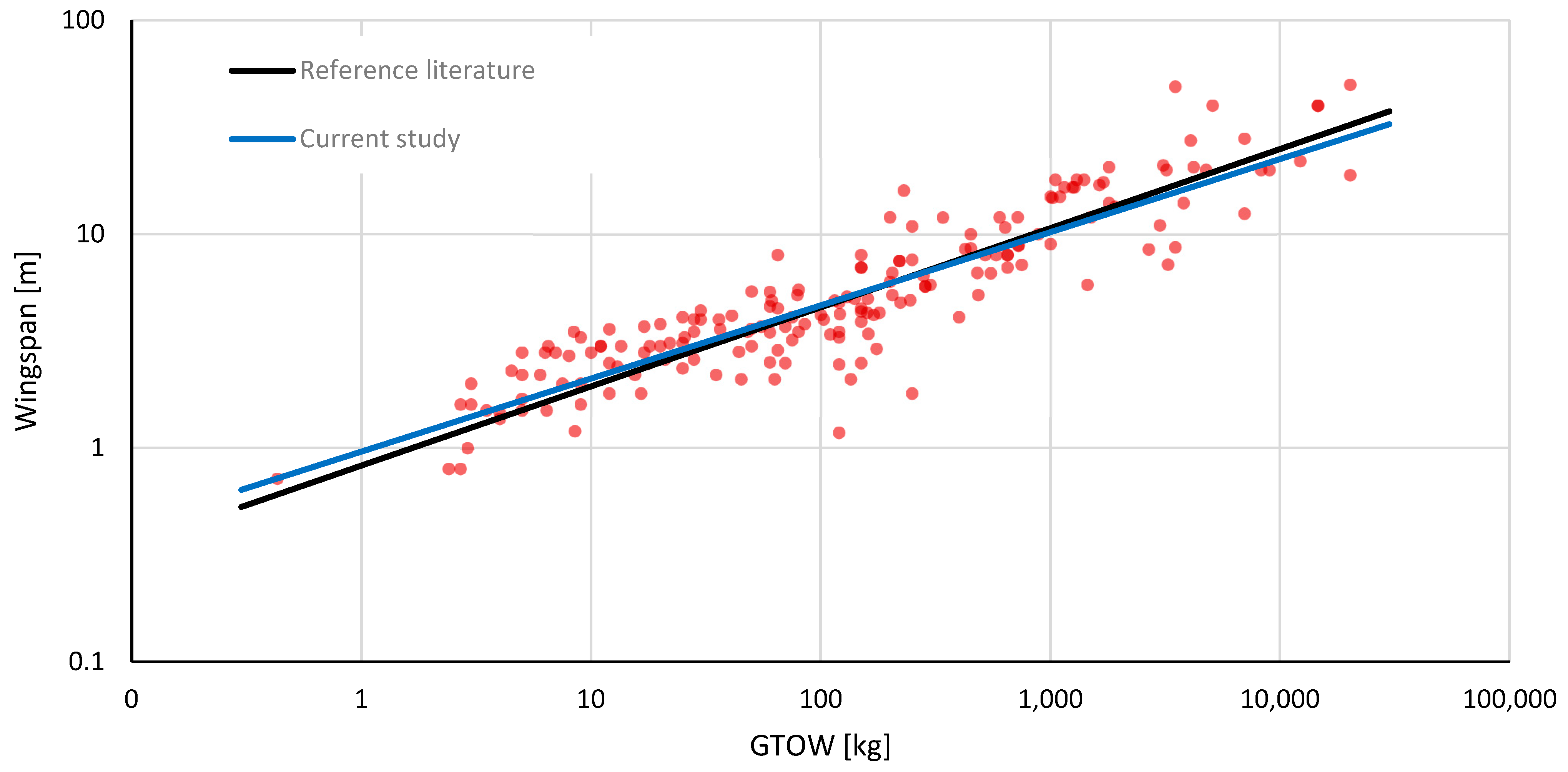
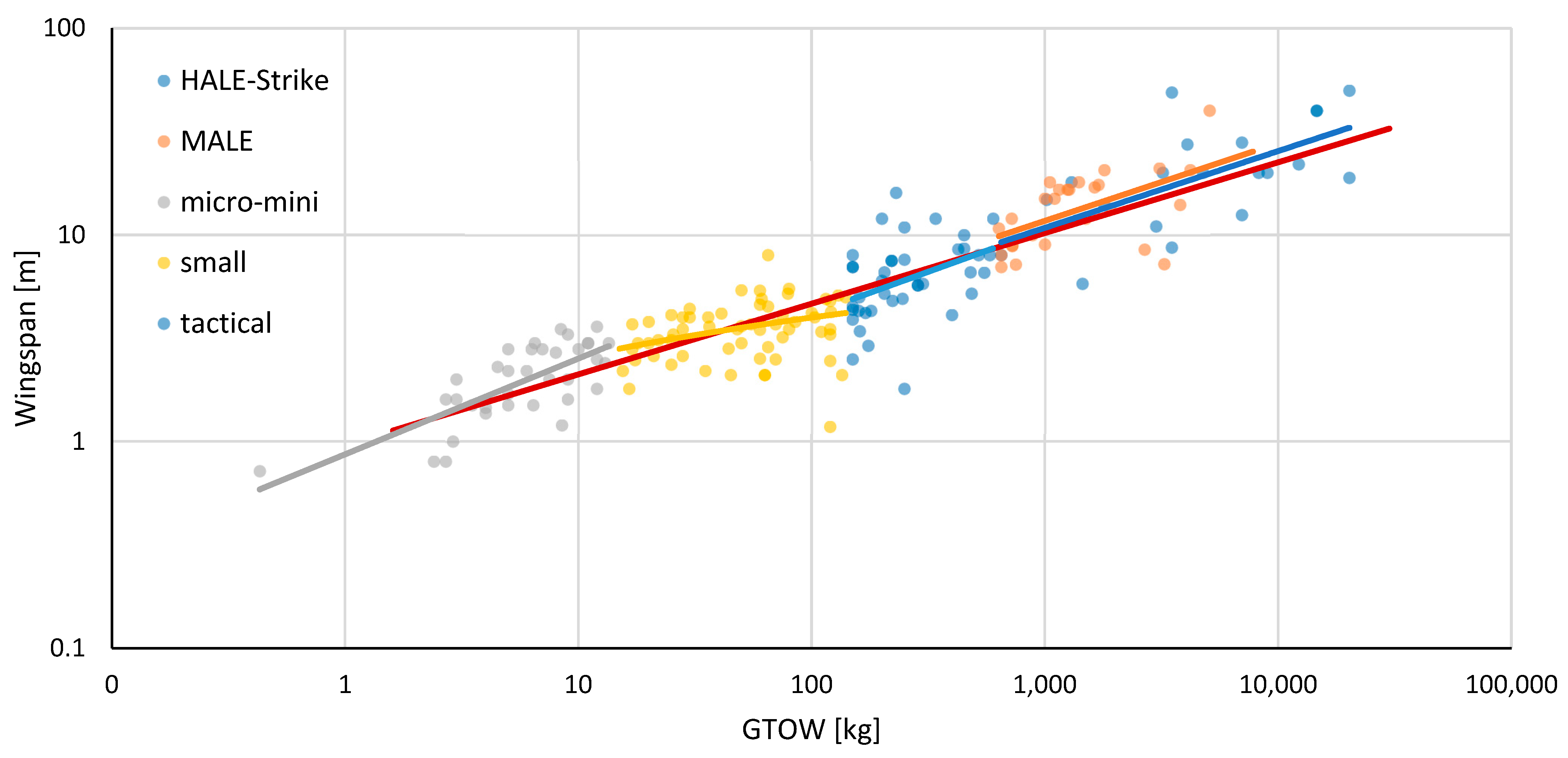
Figure 6 shows the wingspan as a function of GTOW with respect to the NATO classification, while
Table 5 sums up the corresponding statistical and correlation results. As also discussed in
Section 2.4, the trendline fitting is sufficient in the general category, achieving an R
2 of 0.8. However, when each NATO category is individually investigated, the fitting changes considerably. This can be attributed to the inherently large dispersion inside the NATO UAV categories, which is smoothed-out when examining the general dataset. Although a statistical fit might not seem good for a statistics expert, in the field of UAV design this should not be considered a negative result. Instead, in the eyes of a design engineer, this translates to a larger design space for the given category, which would not be available if only the general trendline was taken into account.
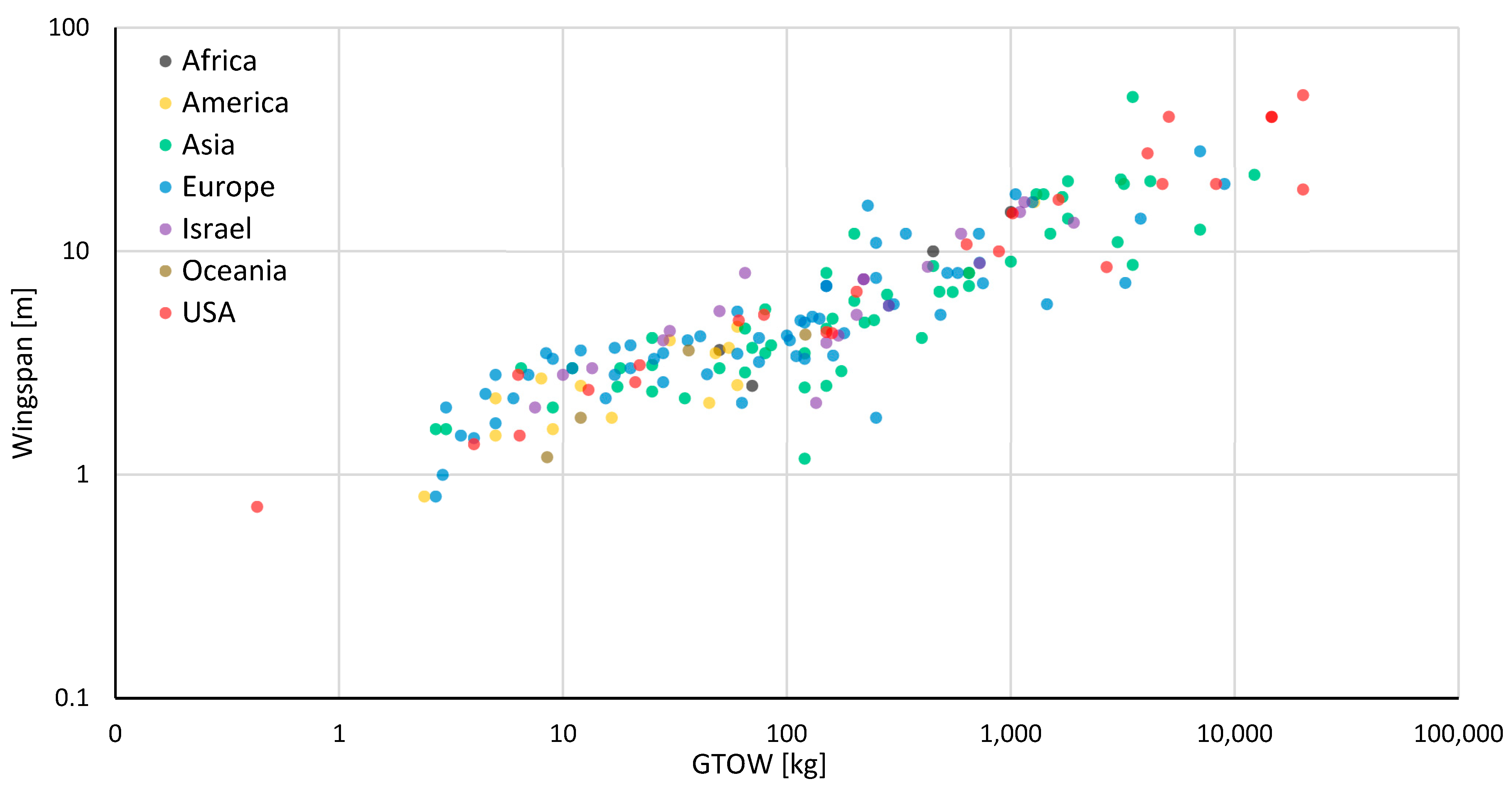
Figure 7 shows the wingspan as a function of GTOW with respect to region of origin. The data dispersion regarding the wingspan as a function of GTOW correlation for different regions of origin is very high. However, this chart can be used to extract certain market conclusions regarding each region. For example, the largest UAVs in terms of wingspan and GTOW have been developed in the United States, whereas the rest of the American continent develops platforms that are smaller in size and weight.
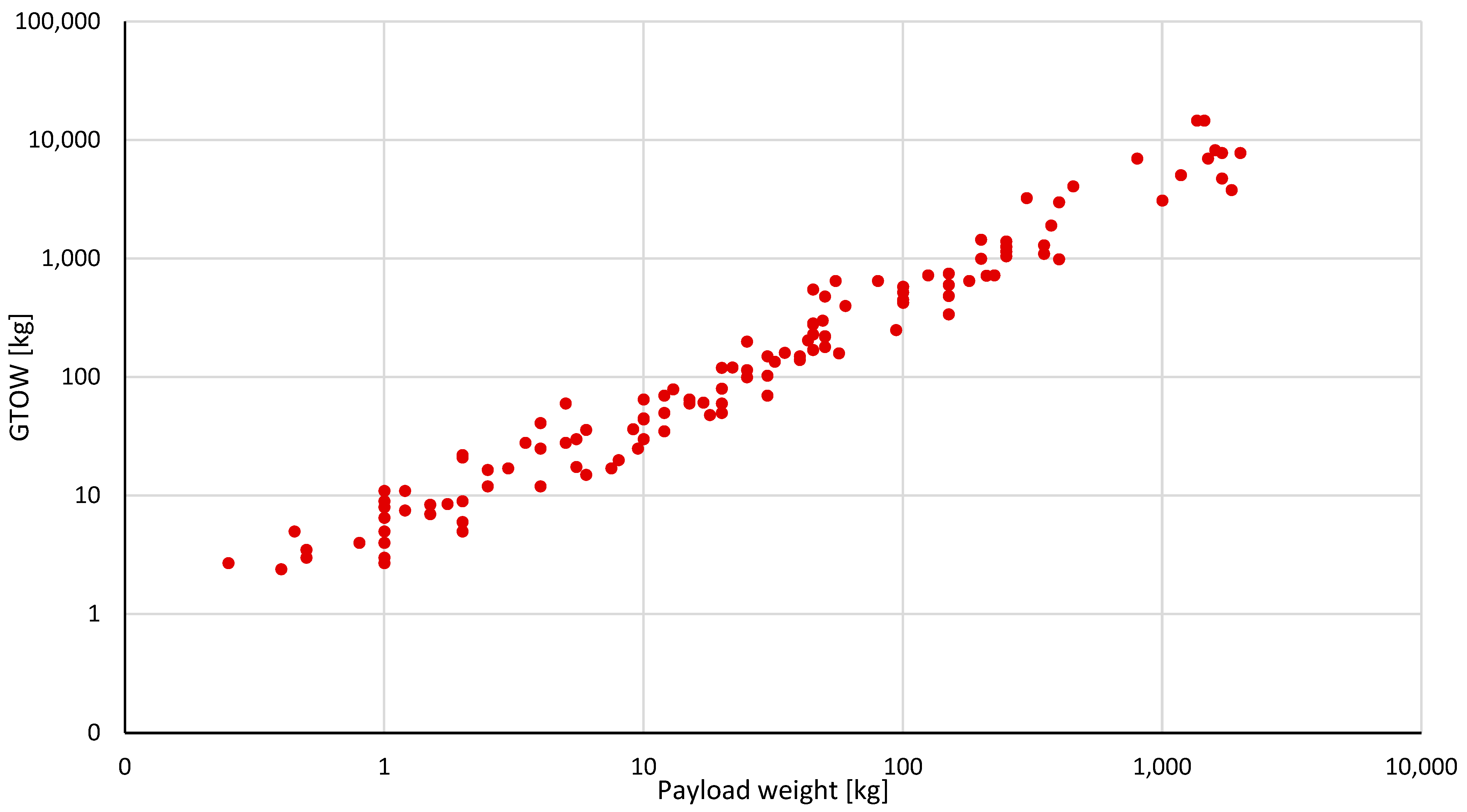
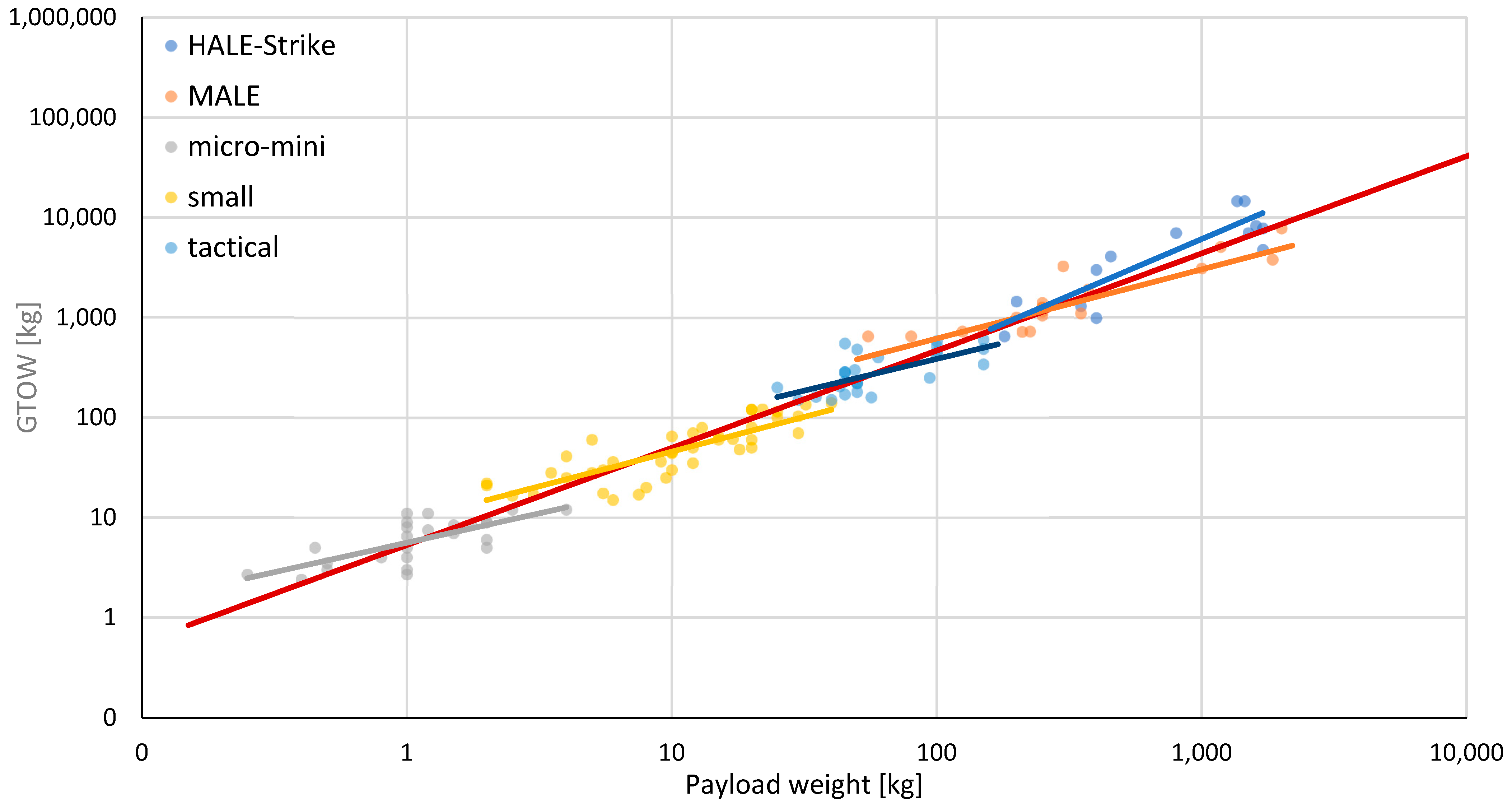
Figure 8 shows the GTOW as a function of payload weight for the general category, while
Figure 9 shows the same correlation with respect to NATO classification. Supplementary
Table 6 sums up the statistical and correlation results for the GTOW against payload weight analysis. In
Figure 8, it can be noticed that there is a very strong power fitting between GTOW and payload weight in the general category, with an R
2 equal to 0.965. A very good fitting is also achieved in the MALE classification, where the dispersion of available data is low. Τhe rest of the fittings appear to have a better R
2 compared to
Table 4, but a considerable dispersion is still present when observing each NATO category individually, leading to the conclusion that the designers need to be more careful when following the trendlines available in previous studies.
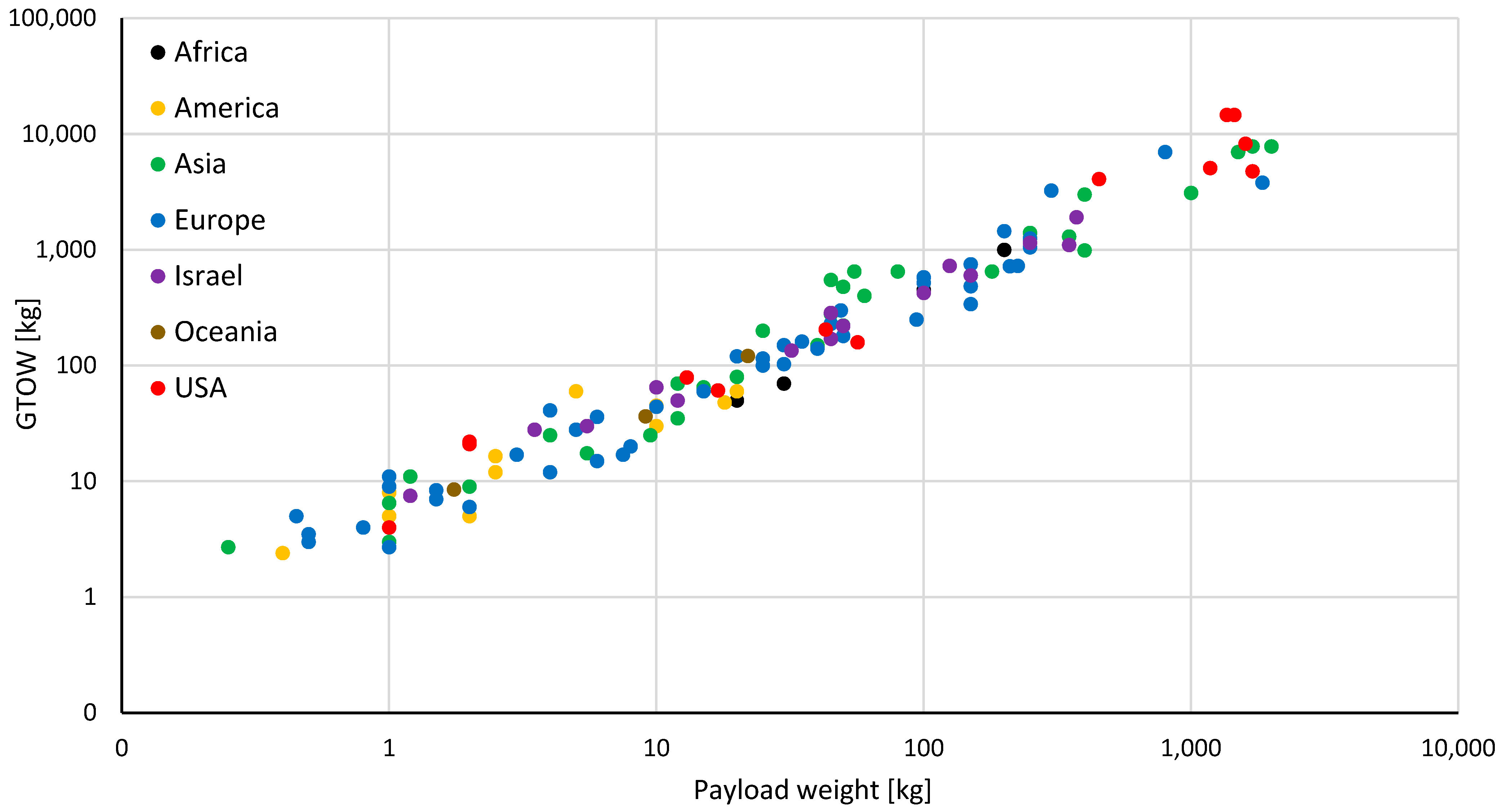
Figure 10 shows the GTOW as a function of payload weight with respect to region of origin. No major conclusions can be drawn from this chart, other than that all regions follow more or less the same trend and that no region shifts its data to a specific plot area.
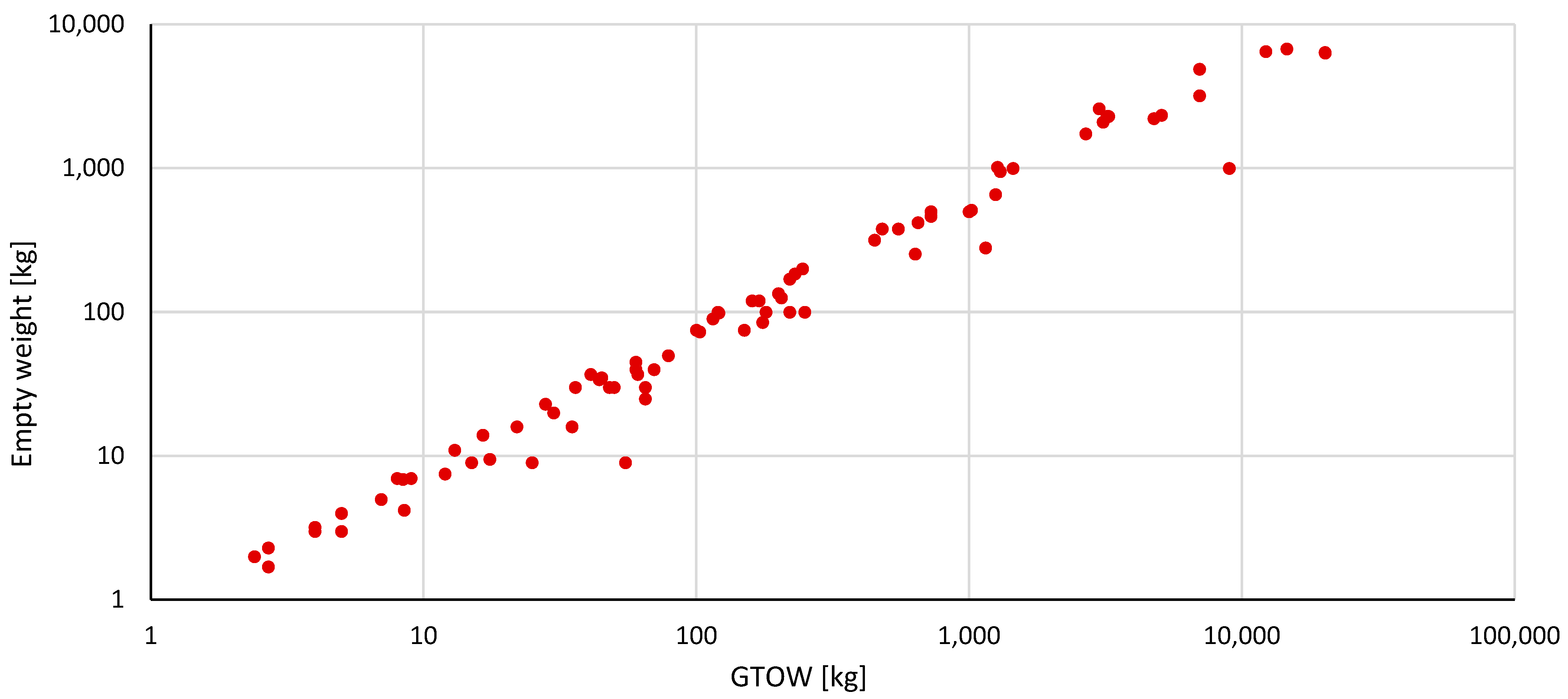
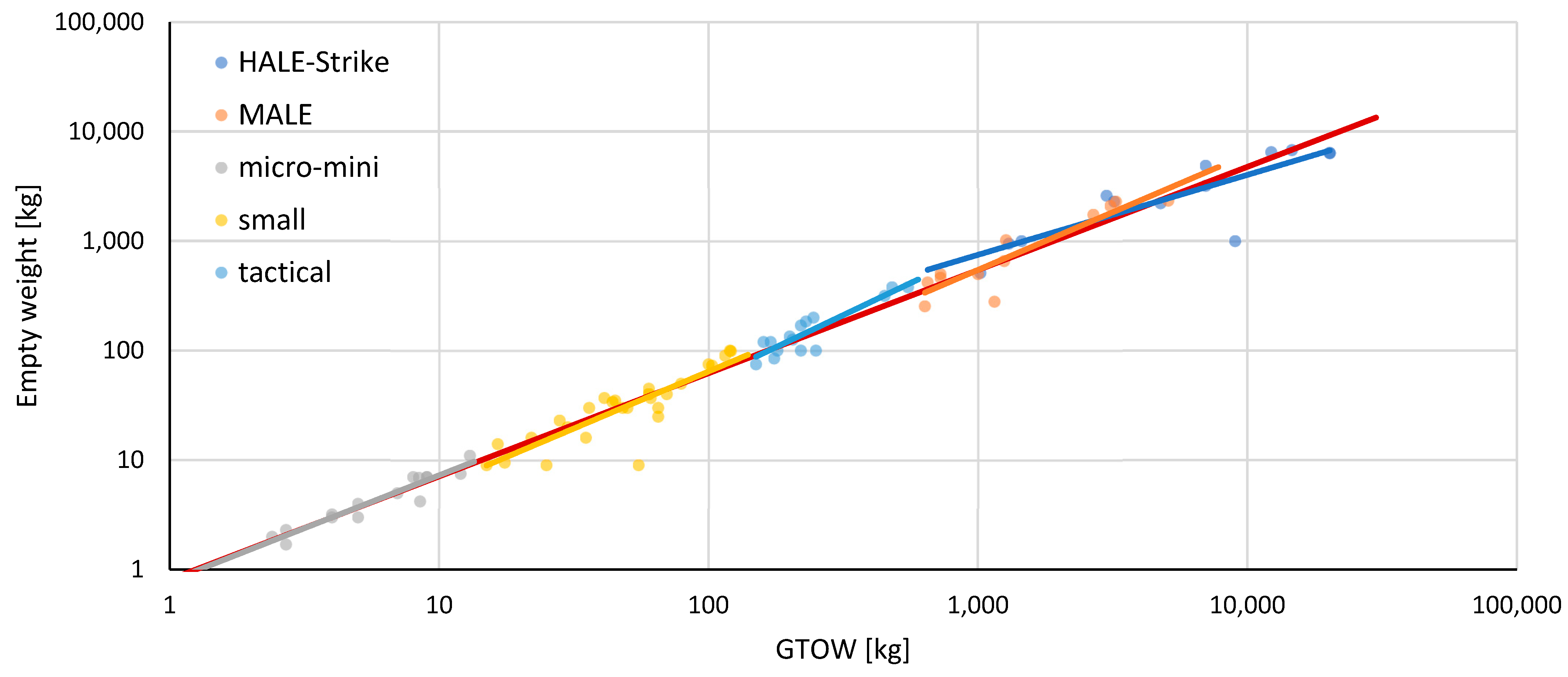
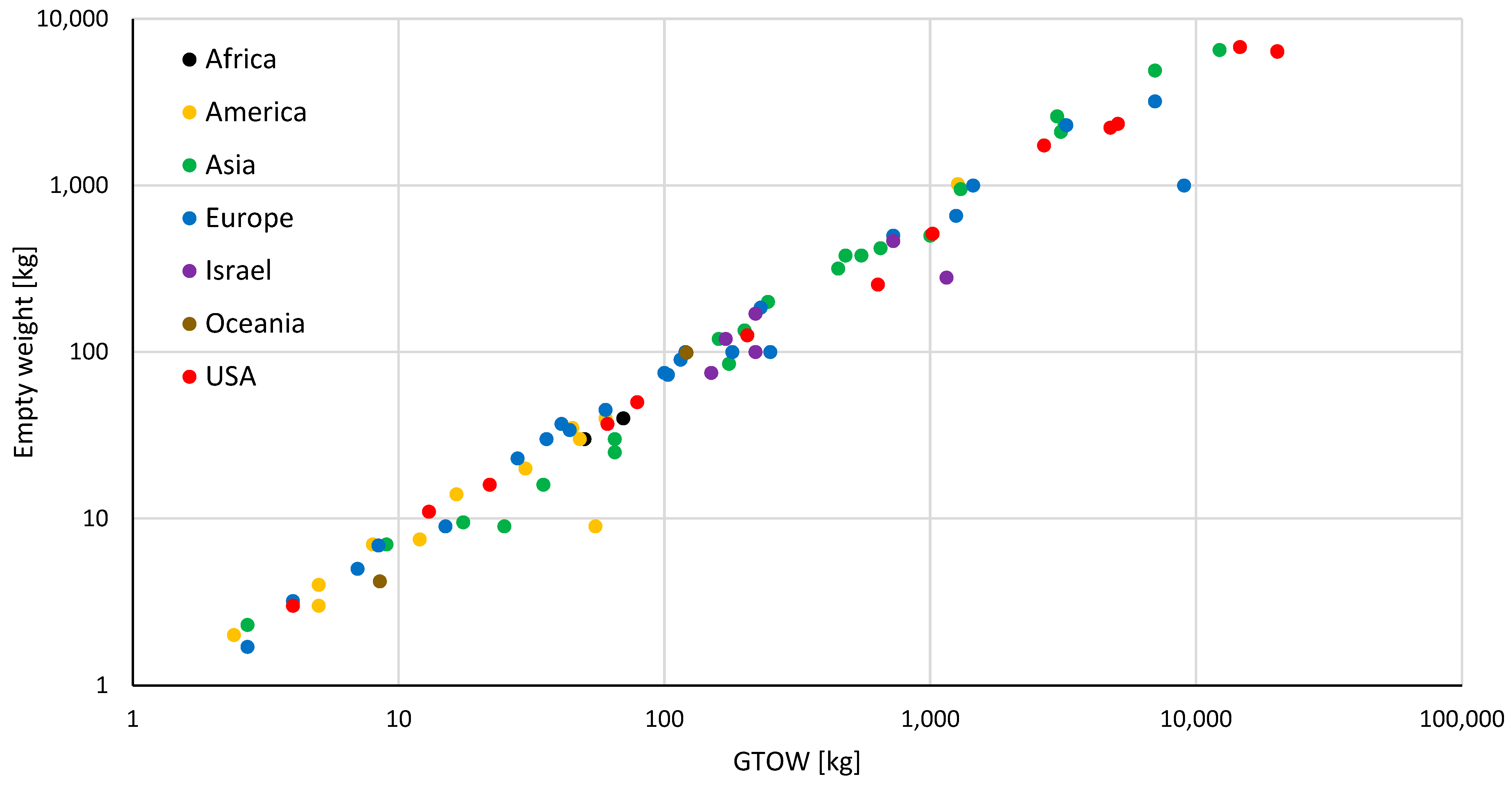
Figure 11 shows the data scatter for the empty weight parameter as a function of GTOW, and
Figure 12 shows the same distribution with respect to NATO classification.
Table 7 sums up the statistical data regarding the trend fitting for the empty weight as a function of GTOW plots. In this case, the level of confidence for the trendlines is higher, as no R
2 is calculated below 0.75 for any NATO category. However, note that this chart shows the
We and not the empty weight ratio (
We/
W0) employed by most design textbooks.
Figure 13 shows the empty weight parameter against GTOW per region of origin. As is the case with
Figure 11, no major deviations are observed from the main trend for any of the regions.
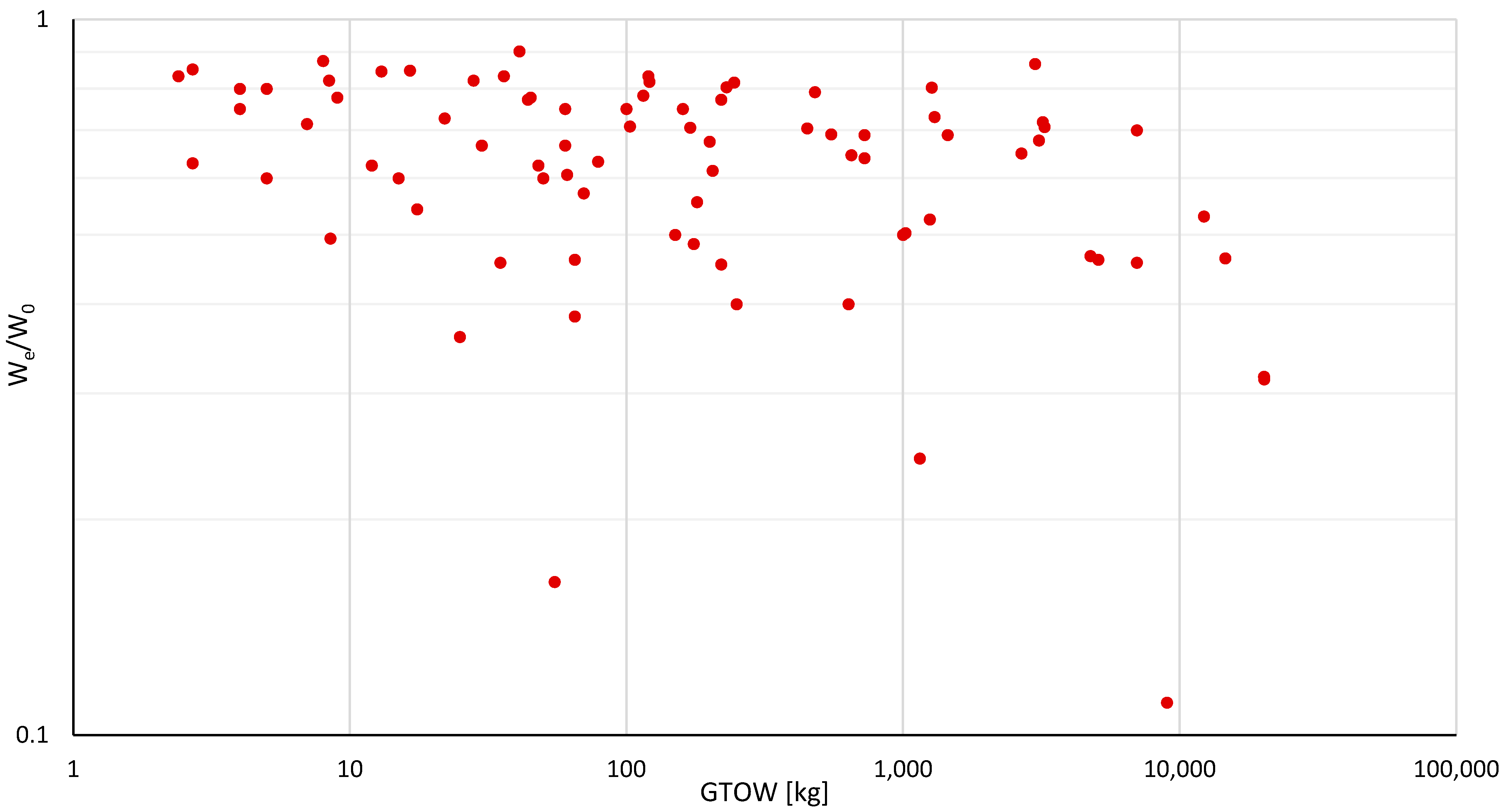
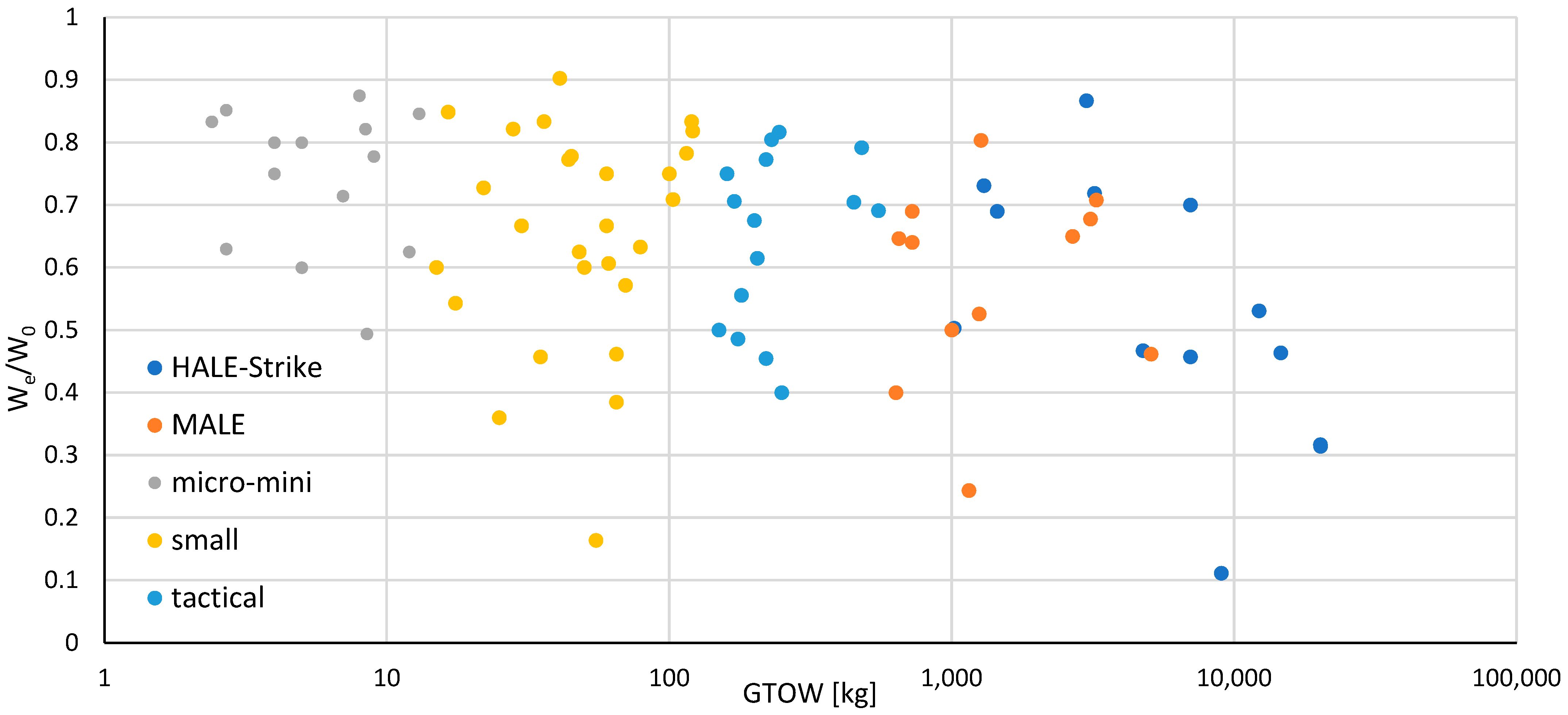
The next two figures (
Figure 14 and
Figure 15) are used to present the empty weight ratio as a function of GTOW, for the general category and NATO categorized UAVs, respectively.
Although no sufficient fit can be achieved for the
We/
W0 against W
0 plots, the general trend is decreasing for heavier UAVs, following the overall philosophy presented in aircraft design textbooks for this particular ratio [
19,
20]. It must be noted, though, that every NATO category presents its own behavior and that UAV designers should consider each of them separately, depending on their respective design study.
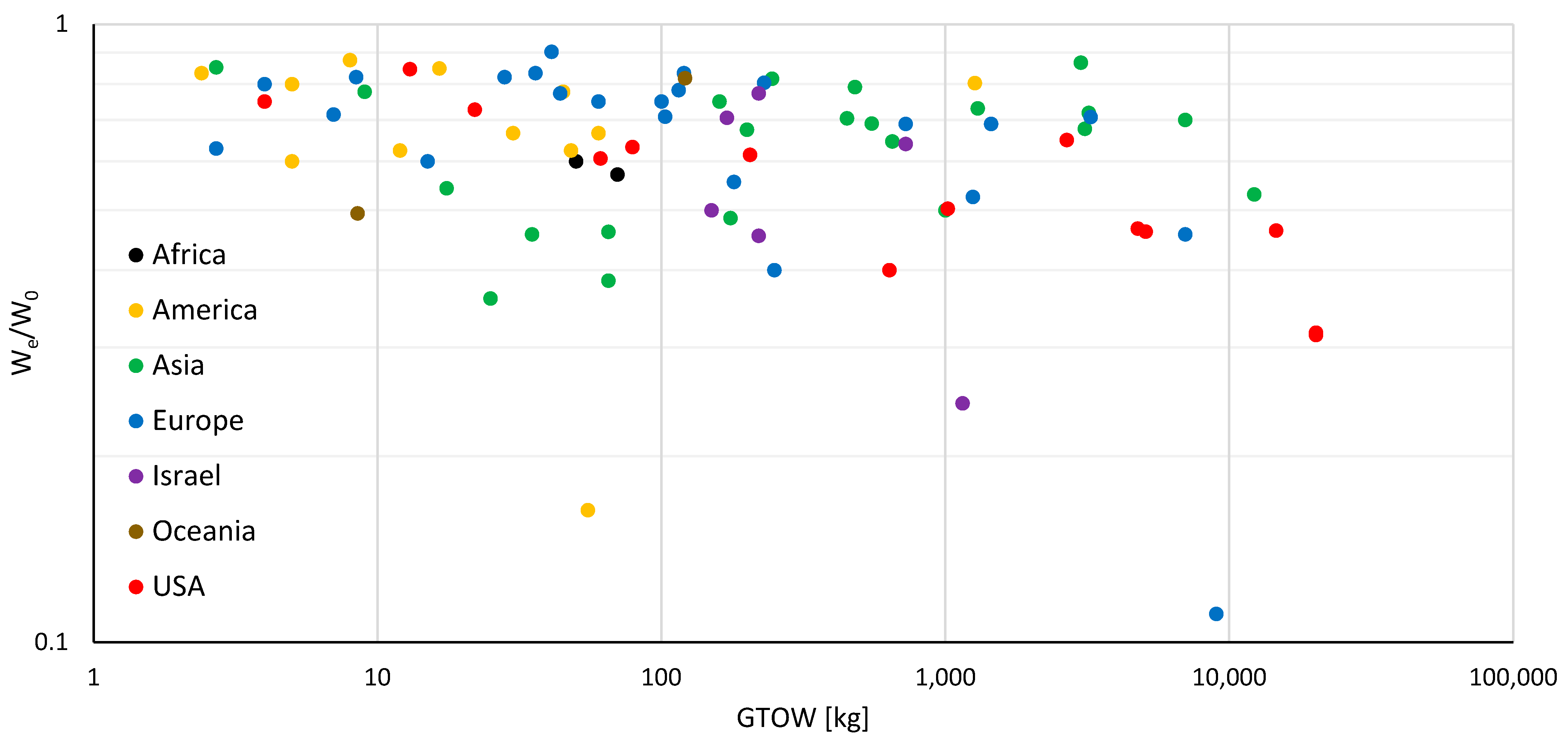
Figure 16 shows the data scatter for the ratio
We/
W0 against
W0 with respect to region of origin. An interesting observation is that platforms that originate from the USA and Europe follow a quite similar trend, while platforms that originate from Israel feature a steeper trend. On the contrary, Asian UAVs feature an opposite behavior, i.e., where the empty weight ratio increases as the platforms get heavier.
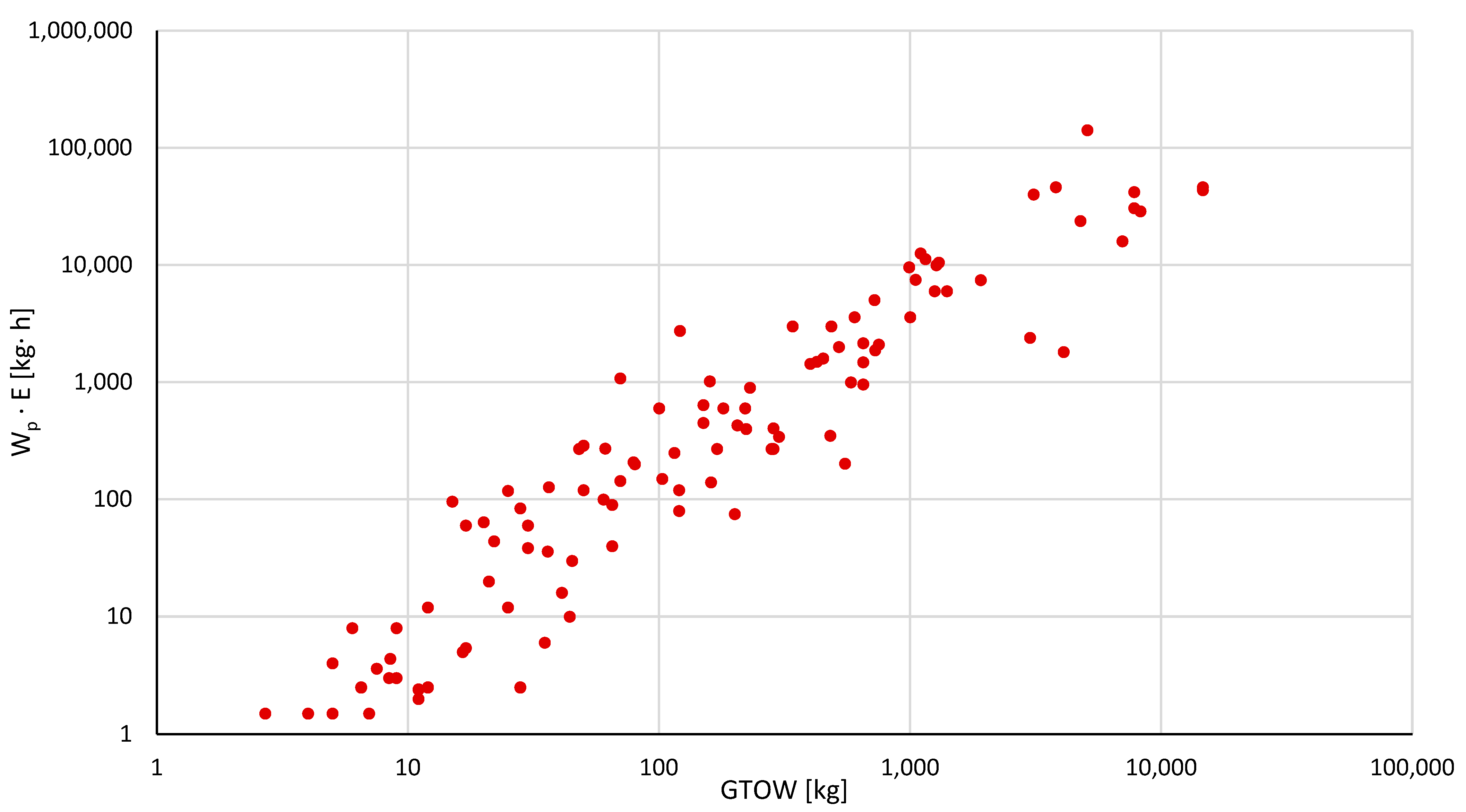
As discussed in the beginning of the section, for a given empty weight value, UAVs can potentially switch between larger payload capacity or fuel, i.e., flight time. To evaluate this potential,
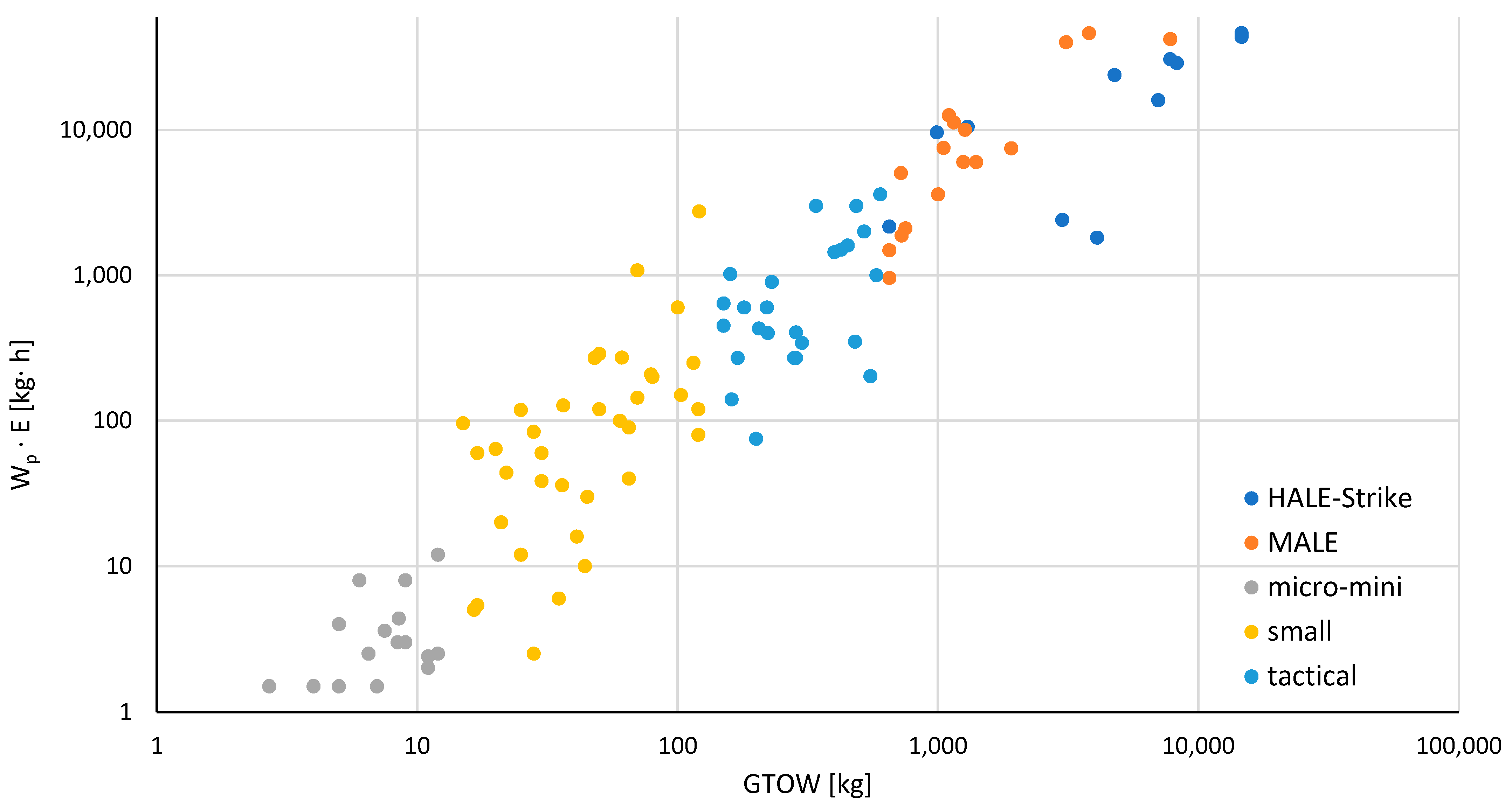
Figure 17 and
Figure 18 show the product of payload weight times the given endurance as a function of GTOW, while
Table 8 sums up the statistical data regarding the trend fitting.
In these plots, clear trendlines exist for the general sample as well as for larger categories of the NATO classification system. Once again, given the large dispersion of the categories that are smaller in weight, it should be noted that, apart from R
2, the UAV designers should also take into consideration the range of the data, before evaluating a design against the suggested trendlines and finalizing their design choices during the conceptual design phase.
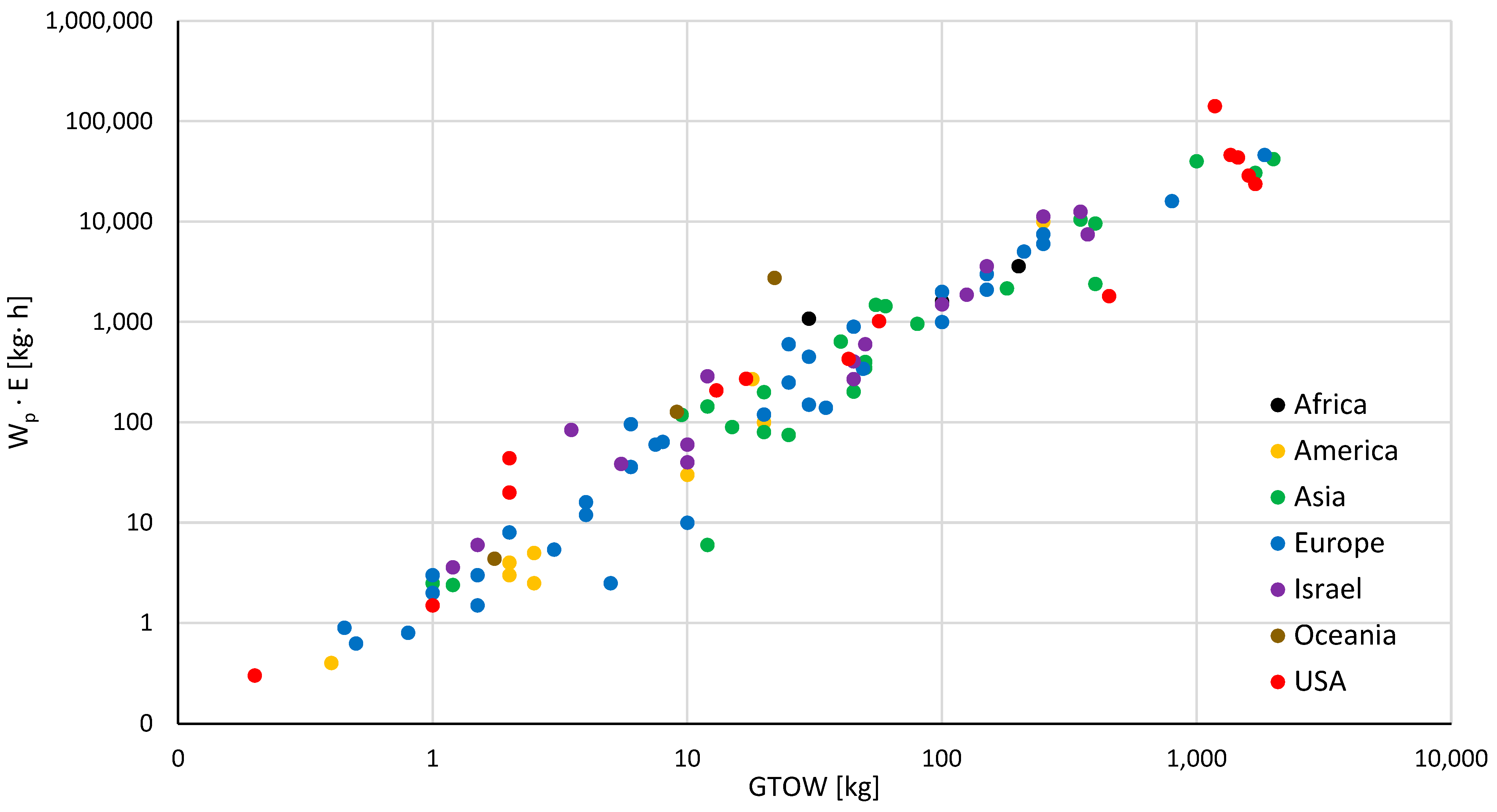
Figure 19 shows the product of payload weight times the given endurance as a function of GTOW per region of origin. It is observed that, in general, all regions follow the same trendline. USA, Israel and Europe span the entire range of the chart, from the lowest to the highest values of GTOW, indicating market presence in all NATO categories. The American continent has a strong presence in the region of lower GTOW and, consequently lower W
p · E products, while Asia focuses on higher GTOW. This can possibly indicate either a design philosophy or a marketing approach.
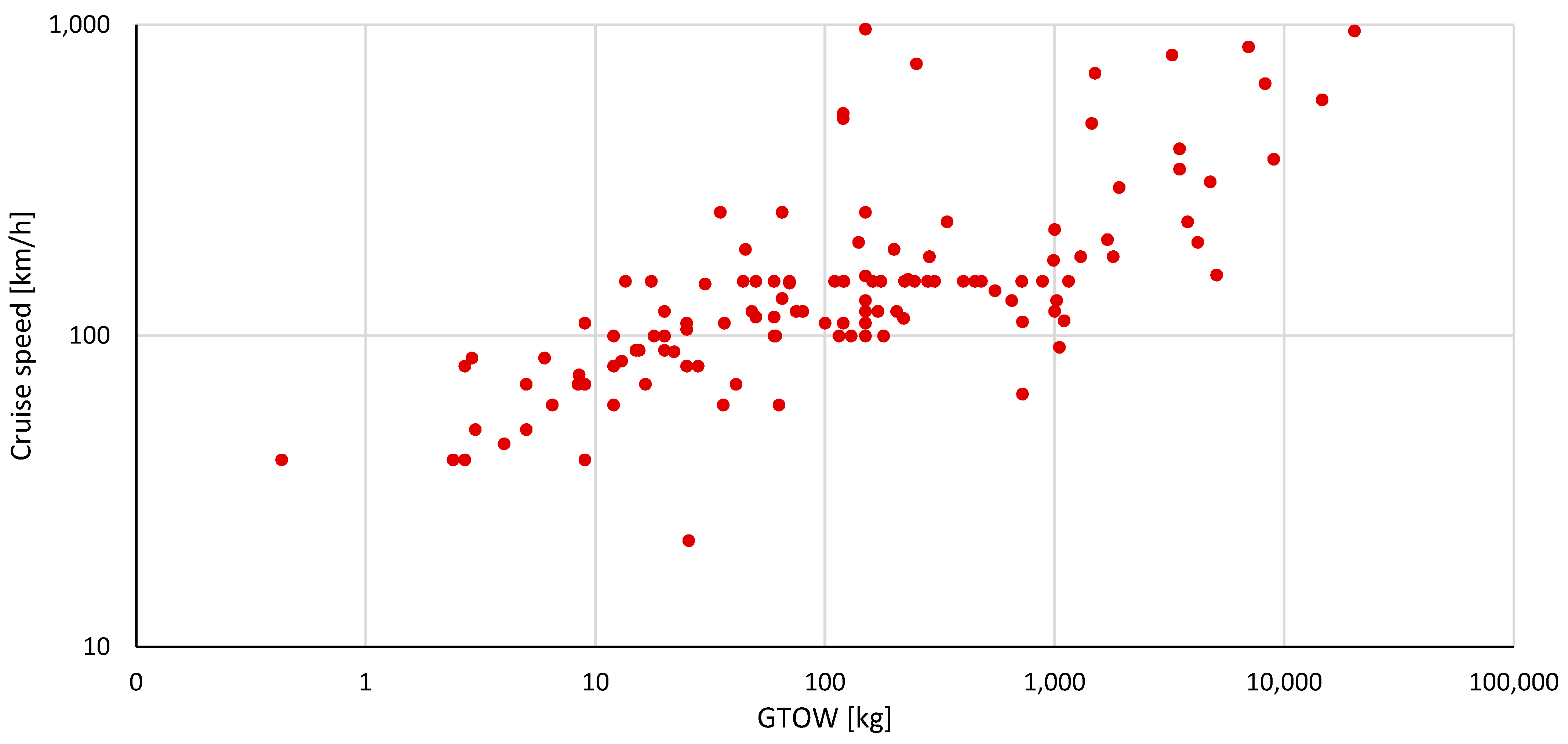
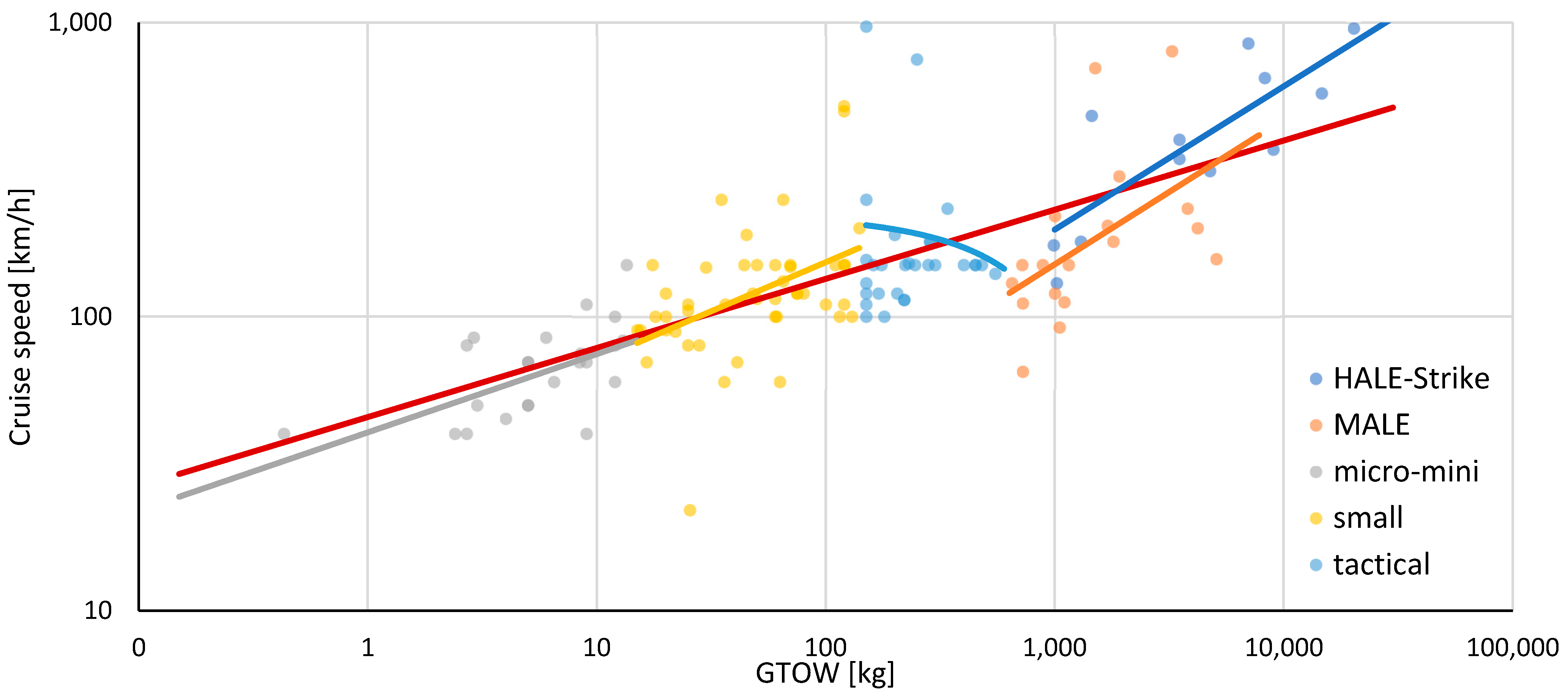
Figure 20 and
Figure 21 present the cruise speed parameter as a function of GTOW, while
Table 9 sums up the corresponding statistical results.
The cruise speed parameter is a typical example where the categories deviate significantly from the general trendline. It is apparent that the analyzed UAV sample depicts a large dispersion that can be explained based on that the cruise speed is dependent both on the airframe, as well as on the sensors and mission.
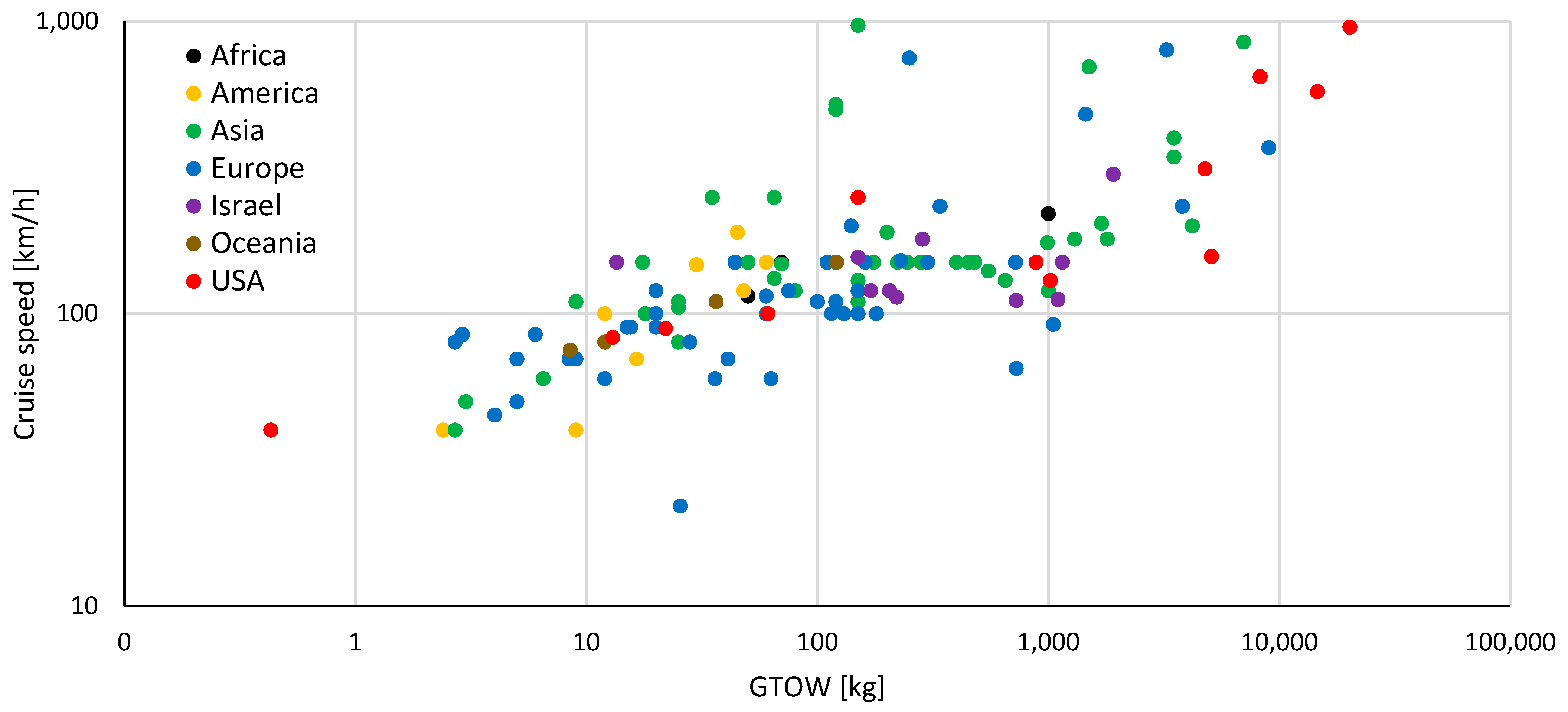
Figure 22 depicts the same parameters with respect to region of origin. UAVs developed in Israel appear to have a common approach, featuring cruise speeds between 100 km/h and 200 km/h from a GTOW range between 10 kg and 1000 kg. UAVs developed in Europe and Asia, on the other hand, feature a large dispersion above 100 kg. Several Asian platforms, in particular, have a documented cruise speed that exceeds 800 km/h, indicating that they have been designed to operate in compressible flow conditions, at least based on their documentation. The USA and the rest of the American continent feature well-established trendlines, with the platforms marked in yellow concentrated again at the lower right corner of the data.
3.2. Results per EIS
In the current section, the UAVs are grouped in regard to their EIS in four major periods. The first one corresponds to the early UAV designs, i.e., the few platforms that were in service before 1995. The 1995–2005 and 2005–2015 periods contain the majority of UAVs and, as such, can be used to generate safer conclusions. The last period corresponds to the last decade of UAV design and, even though some operational examples exist, the data in the literature are considerably fewer when compared to the previous two periods. Indicatively, 12, 31 and 79 UAV models belong in the first, second and third periods, respectively, whereas only 16 are available for the fourth period (
Appendix A). As also discussed in the introduction, the models considered in this section are 138, since the EIS dates are not available for the rest 64.
It must be noted at this point that, especially concerning the last decade, the authors have limited access to fixed-wing UAV data. This is possibly attributed to the fact that, since many of the new UAV projects are still under development, their information released to the general public is limited for safety reasons. However, the scientific approach and analysis methods suggested in this work can potentially be applied to any UAV database, e.g., in a few years’ time when more data will be available. For the time being, it was decided to omit the last period altogether, so as not to generate inaccurate conclusions concerning the trends of the examined parameters.
Six box plots (
Figure 23,
Figure 24,
Figure 25,
Figure 26,
Figure 27 and
Figure 28) are used to present the progression of key technical parameters through the years, per NATO category. Note that, in some of these plots, the logarithm of the corresponding parameter is presented so that the results enhance the datagrams visualization and comprehensibility.
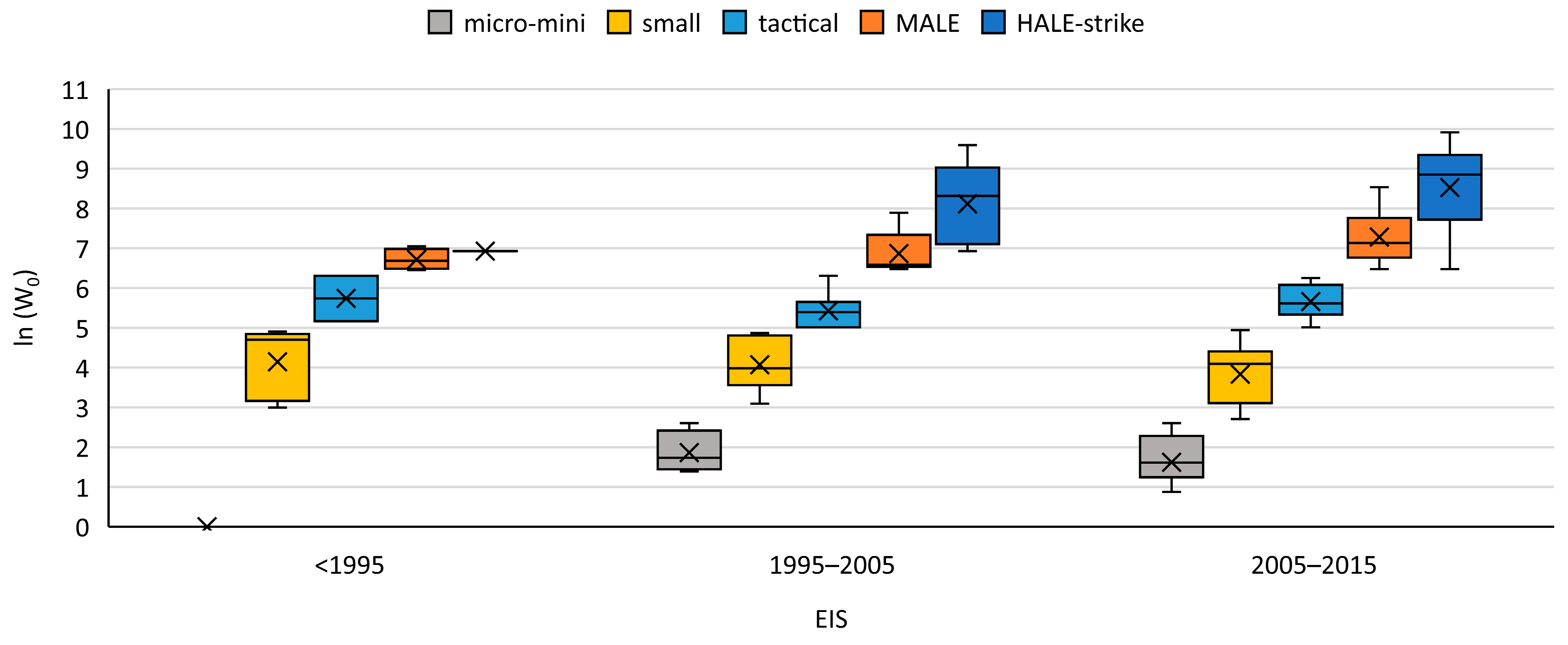
Figure 23 shows the GTOW progression for the five NATO categories. In terms of GTOW, the small, tactical and MALE categories have a constant presence throughout the years. However, in the last of the examined decades, these three categories tend to deviate from one another and the boundaries between the three become clearer, at least in terms of GTOW. The micro-mini and HALE categories did not exist before 1995, indicating technology was not mature enough. In the last two decades, there has been a large expansion of the design space in terms of GTOW, with the HALE mean increasing by 50.4% and the micro-mini decreasing by 21%. The whiskers in the last examined decade have a larger dispersion, especially for the MALE and HALE categories, indicating an expansion of the design space regarding these categories. It is evident that there is a potential overlap between NATO categories, particularly in Class III, as discussed in
Section 2.2.1. Therefore, it is important to consider the flight altitude as well, to accurately determine the appropriate NATO category for a given UAV. This is because some UAVs with greater service ceilings (HALE) may not necessarily be heavier than their MALE counterparts. The reader is advised to take this into account when analyzing the data.
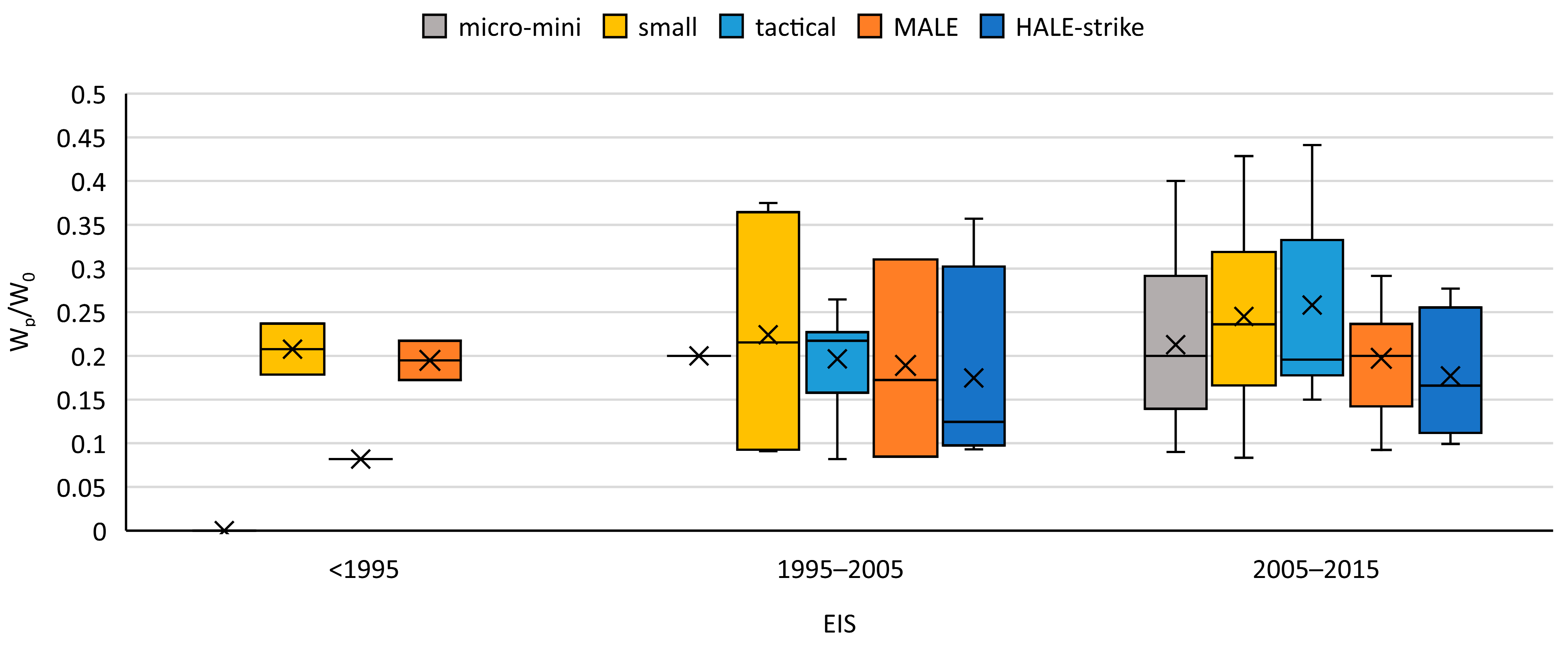
Figure 24 presents the ratio of the payload weight to GTOW per NATO classification, in 10-year intervals. It is observed that the micro-mini categories have an almost constant mean of 0.2. However, the dispersion has increased dramatically from 2005 onwards, indicating that more models of this category are being introduced within a greater design space. The small category fluctuates between 0.2 and 0.25 as the corresponding ratio slightly increases (24%), and their box dispersion decreases. For the tactical category, the mean appears in the same range, although with an exact opposite trend, i.e., the mean decreases (28%), and the box dispersion increases. Lastly, the MALE and HALE categories are below 0.2. Their mean values remain practically constant, and their box dispersion decreases.
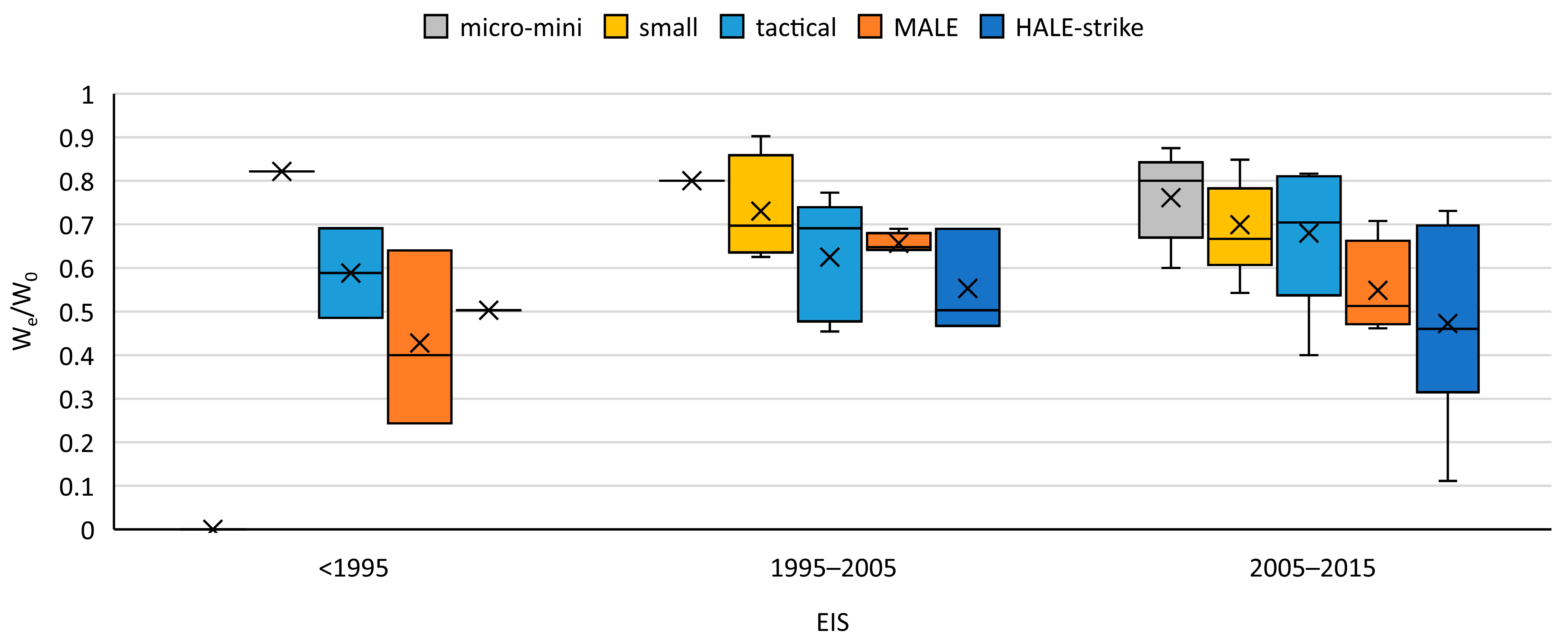
Figure 25 presents the evolution of the
We/
W0 ratio for all NATO categories, where no specific tendency can be observed for the mean and median values of the distribution. The results indicate that the empty weight fraction of the MALE and HALE categories appears to be decreasing, suggesting a market trend towards higher payload and fuel weight fractions. The decrease in empty weight fraction can be attributed to the improvements in material sciences and UAV manufacturing techniques [
19,
20]. However, it is important to note that the dispersion of the sample has increased in recent years; therefore, researchers and design engineers are advised to proceed with caution when using a general trendline for future UAV designs.
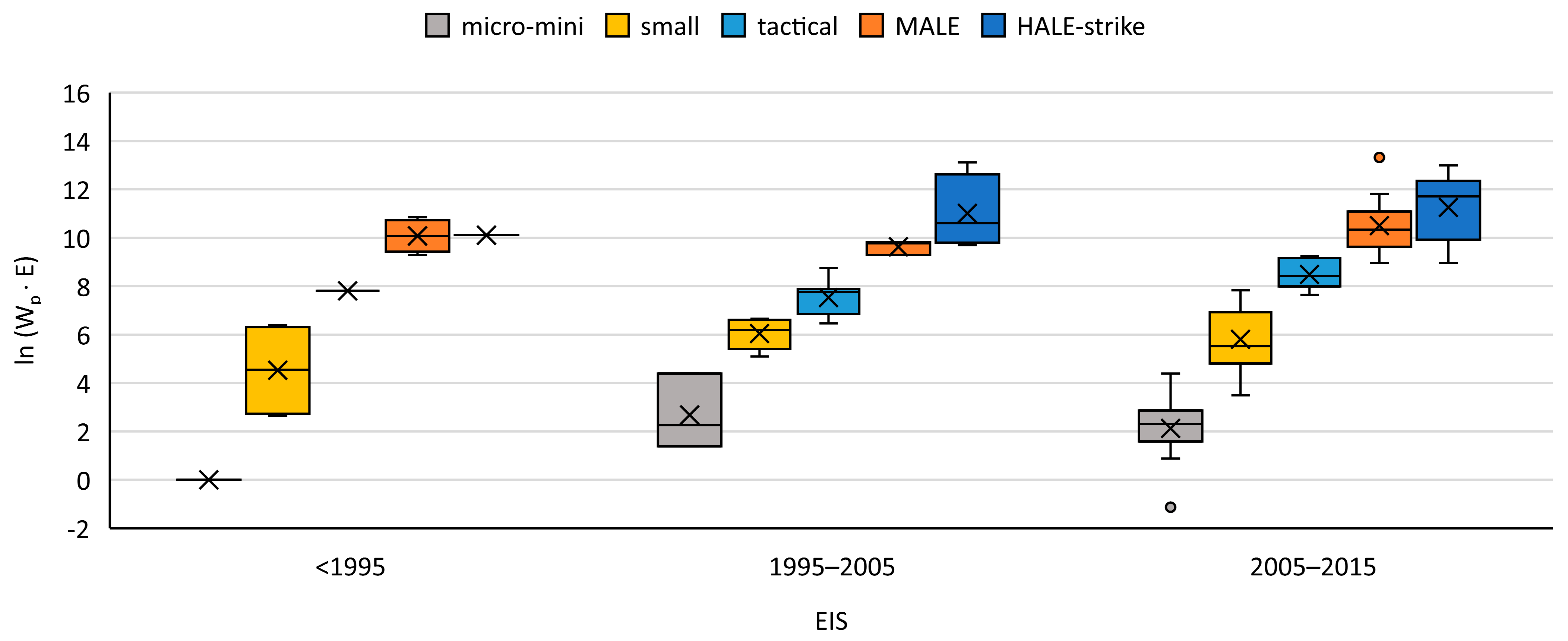
Figure 26 presents the evolution of the W
p · E product, per NATO category, as a function of EIS. A logarithmic scale is employed so that a better visualization of the results is possible. The results of this chart can be used complementarily to the ones of
Figure 25, indicating that UAV operational capabilities expand over the years, as the W
p · E product increases for most categories. Combining this observation with the fact that the ratios of W
p over W
0 remain more or less constant (
Figure 24), it can be suggested that the UAV market is prioritizing increasing flight times (endurance).
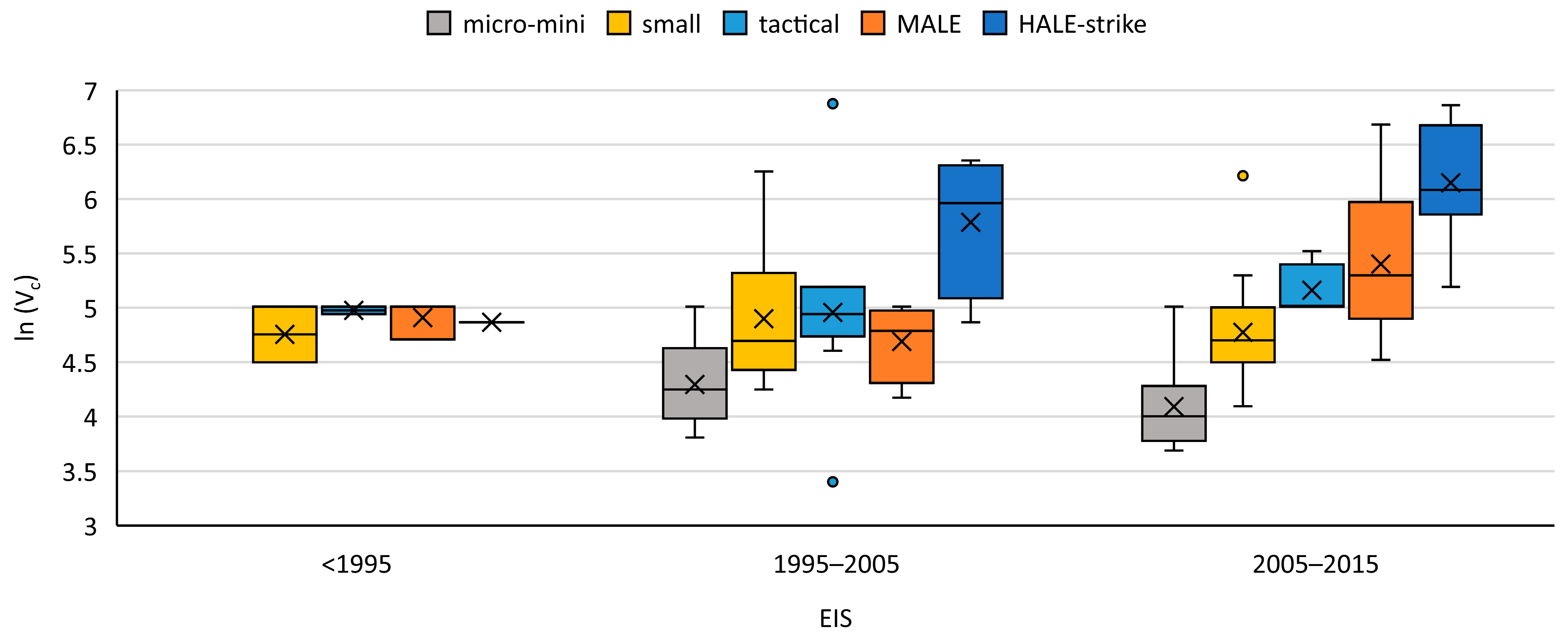
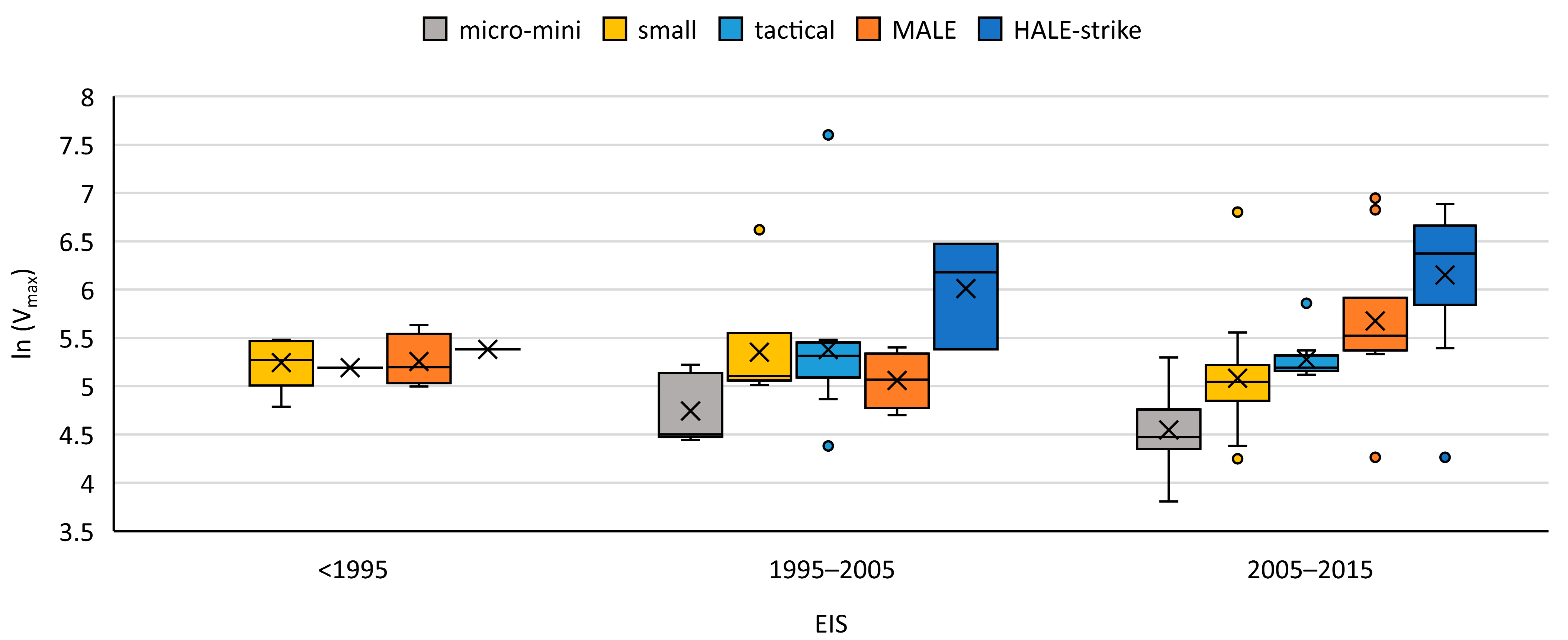
Figure 27 and
Figure 28 show the progression of cruise and maximum speed, respectively, as a function of EIS, per NATO classification. One interesting finding is that in the first two decades, the cruise speed parameter for all categories is similar, with only HALE platforms deviating. However, in the 21st century, an increasing deviation is observed. Similarly, for the maximum speed, the small, tactical, and MALE categories are grouped together before 1995, while in the 2005–2015 decade, a clearer trend emerges, indicating that larger UAVs have a higher maximum speed.
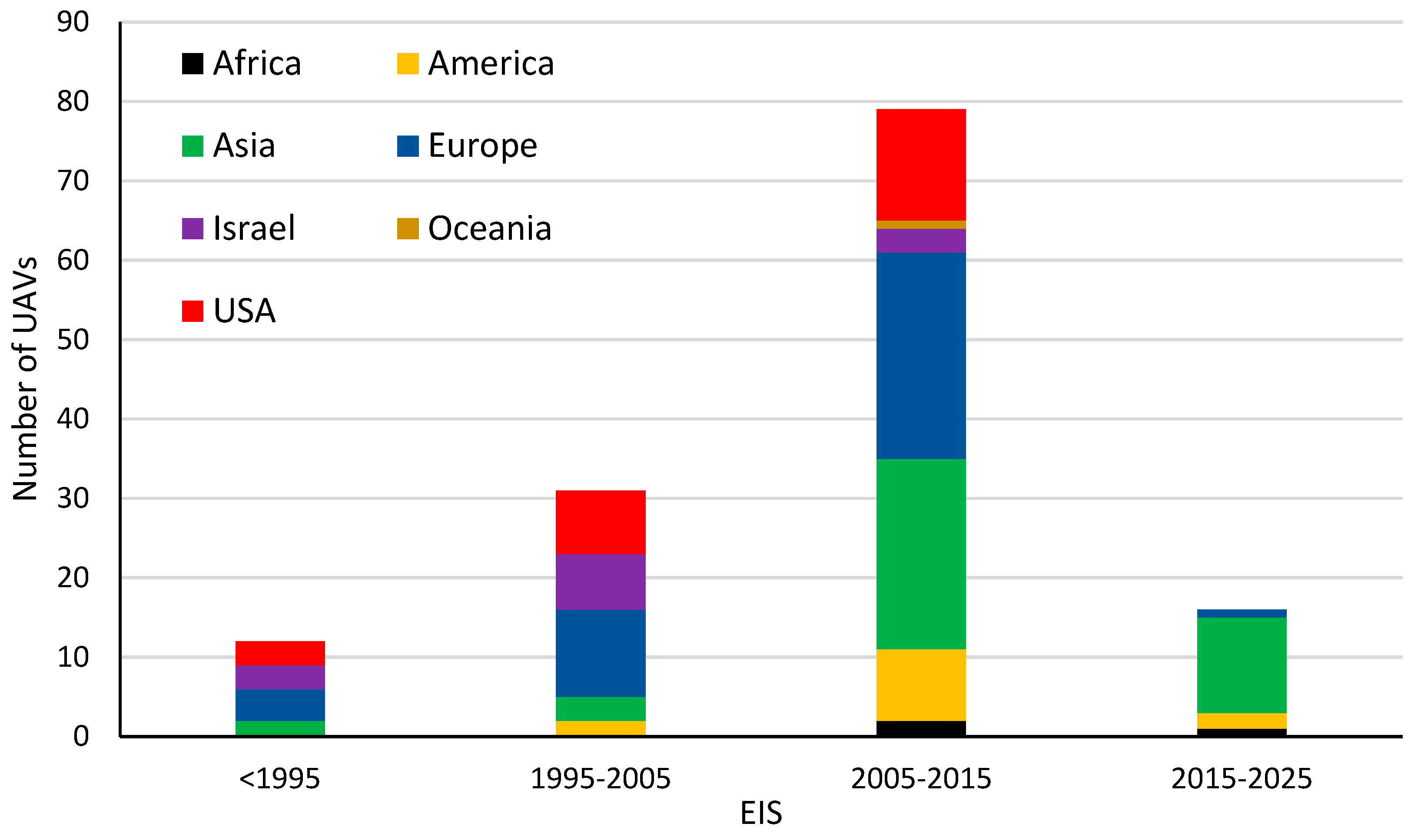
The last chart of this section (
Figure 29) shows the number of UAV platforms that have been introduced in the past three periods per region. The regions of America and Europe present a steady advancement. Africa and Oceania have fewer entries in this chart, while in Asia it appears that UAV development has boomed since the beginning of the century. Note that the entries from USA and Israel do not appear to increase at the same pace, although both are amongst the pioneering nations in UAV development (first period). However, this chart only shows the number of new entries (i.e., new fixed-wing UAV models) per EIS period and does not show the number of units produced, as the latter is not a publicly available value. Therefore, this lack of new entries for the USA and Israel may be attributed to the high maturity of UAV technology in these regions. That is, a few well-designed fixed-wing UAV models may be enough to carry out the required missions, if produced in large numbers.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






























