
A Novel Fault-Tolerant Air Traffic Management Methodology Using Autoencoder and P2P Blockchain Consensus Protocol



Abstract
1. Introduction
2. Problem Statement
3. Methodologies
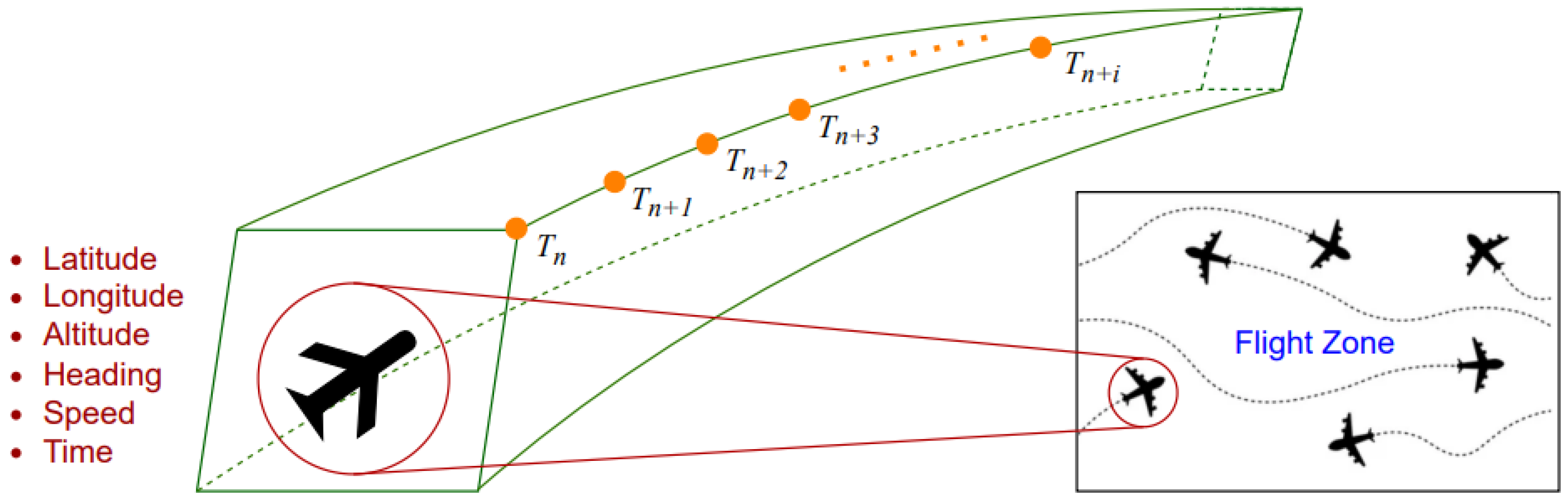
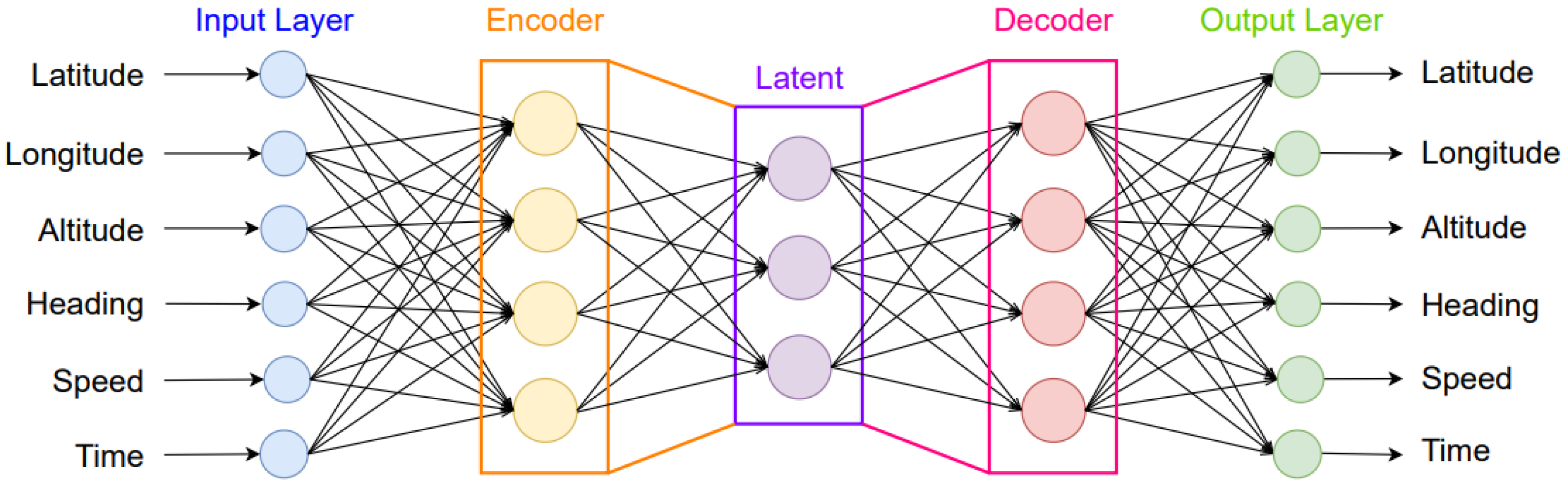
3.1. Trajectory Prediction
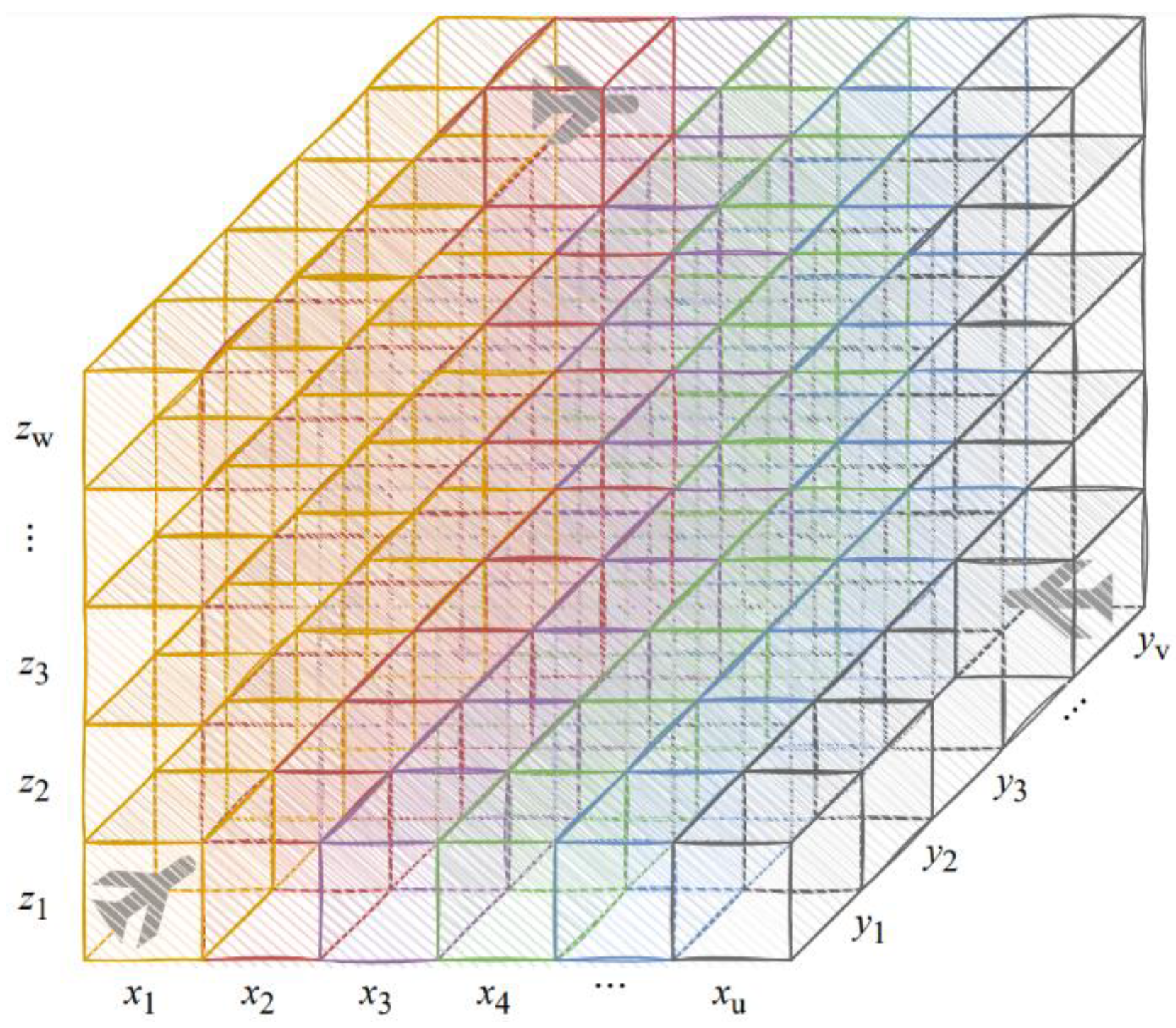
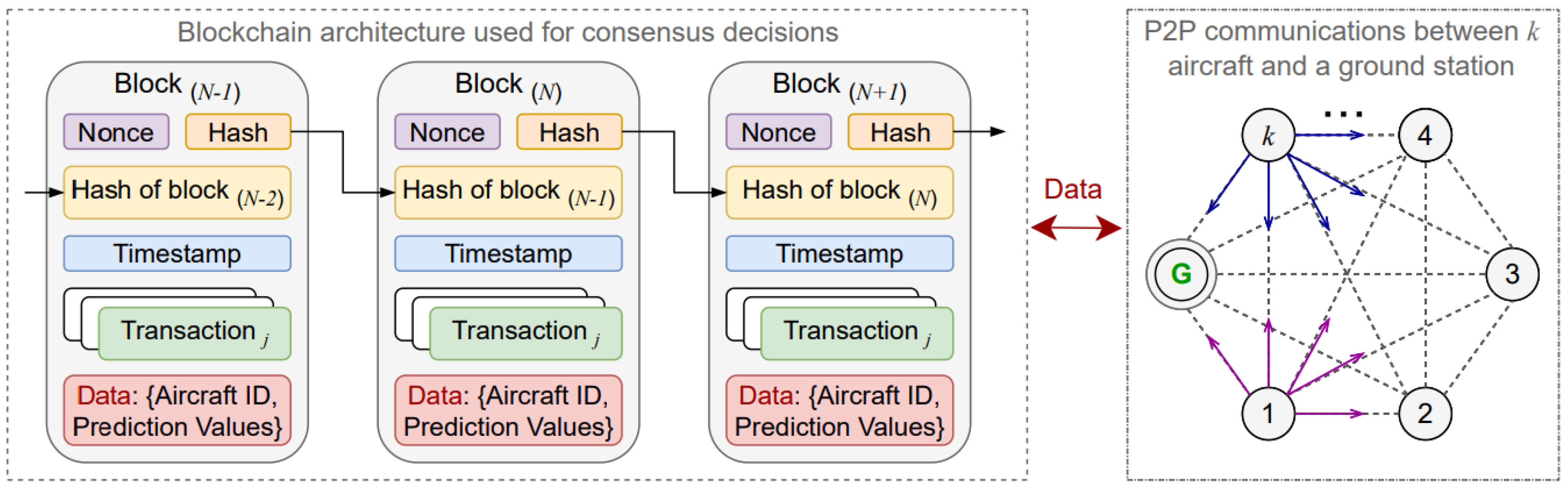
3.2. Airspace Allocation
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| A | Decoded GPS data |
| B | Encoded GPS data |
| E | Encoder transfer function |
| D | Decoder transfer function |
| Number of steps for future trajectory prediction | |
| Number of executed agreements | |
| Number of aircraft in a flight zone before sharding | |
| Number of aircraft in a flight zone after sharding | |
| L | Autoencoder loss function |
| Number of districts that provide sub-flight zones after sharding | |
| Number associated with a block in the chain | |
| Q | Autoencoder quality function |
| Time during which the aircraft is in step n |
References
- Lygeros, J.; Tomlin, C.; Sastry, S. On controller synthesis for nonlinear hybrid systems. In Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171), Tampa, FL, USA, 18 December 1998; IEEE: Piscataway, NJ, USA; Volume 2, pp. 2101–2106.
- Murrieta-Mendoza, A.; Demange, S.; George, F.; Botez, R. Performance DataBase creation using a level D simulator for Cessna Citation X aircraft in cruise regime. In Proceedings of the IASTED Modeling, Identification and Control Conference, Innsbruck, Austria, 16–17 February 2015; pp. 818–826. [Google Scholar]
- Murrieta Mendoza, A.; Bunel, A.; Botez, R.M. Aircraft vertical reference trajectory optimization with a RTA constraint using the ABC algorithm. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 4208. [Google Scholar]
- Murrieta-Mendoza, A.; Romain, C.; Botez, R.M. Commercial aircraft lateral flight reference trajectory optimization. IFAC-PapersOnLine 2016, 49, 1–6. [Google Scholar] [CrossRef]
- Petres, C.; Pailhas, Y.; Patron, P.; Petillot, Y.; Evans, J.; Lane, D. Path planning for autonomous underwater vehicles. IEEE Trans. Robot. 2007, 23, 331–341. [Google Scholar] [CrossRef]
- Geraerts, R. Planning short paths with clearance using explicit corridors. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AL, USA, 4–8 May 2021; IEEE: Piscataway, NJ, USA; pp. 1997–2004.
- Yang, K.; Sukkarieh, S. 3D smooth path planning for a UAV in cluttered natural environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA; pp. 794–800. [Google Scholar]
- Nash, A.; Koenig, S.; Tovey, C. Lazy Theta*: Any-angle path planning and path length analysis in 3D. In Proceedings of the AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 11–15 July 2010; Volume 24, pp. 147–154. [Google Scholar]
- Wilburn, J.N.; Perhinschi, M.G.; Wilburn, B.K. Implementation of a 3-Dimensional Dubins-Based UAV Path Generation Algorithm. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 5232. [Google Scholar]
- Murrieta-Mendoza, A.; Botez, R.M. Methodology for vertical-navigation flight-trajectory cost calculation using a performance database. J. Aerosp. Inf. Syst. 2015, 12, 519–532. [Google Scholar] [CrossRef]
- Boughari, Y.; Botez, R.; Ghazi, G.; Theel, F. Evolutionary Algorithms for Robust Cessna Citation X Flight Control; No. 2014-01-2166; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Patron, R.F.; Kessaci, A.; Botez, R.M. Flight trajectories optimization under the influence of winds using genetic algorithms. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4620. [Google Scholar]
- Hashemi, S.M.; Barati, S.; Talati, S.; Noori, H. A genetic algorithm approach to optimal placement of switching and protective equipment on a distribution network. J. Eng. Appl. Sci. 2016, 11, 1395–1400. [Google Scholar]
- Murrieta-Mendoza, A.; Ruiz, H.; Kessaci, S.; Botez, R.M. 3D reference trajectory optimization using particle swarm optimization. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 3435. [Google Scholar]
- Murrieta-Mendoza, A.; Hamy, A.; Botez, R.M. Four-and three-dimensional aircraft reference trajectory optimization inspired by ant colony optimization. J. Aerosp. Inf. Syst. 2017, 14, 597–616. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Menhaj, M.B.; Amani, A.M. Reconfigurable Fault-Tolerant Control by Linear quadratic Virtual Actuator under Control Signal Constraint. J. Eng. Appl. Sci. 2006, 11, 1998–2004. [Google Scholar]
- Perhinschi, M.G.; Moncayo, H. Artificial immune system for comprehensive and integrated aircraft abnormal conditions management. Adv. Comput. Intell. Auton. Aerosp. Syst. 2018, 147–218. [Google Scholar]
- Patrón, R.F.; Kessaci, A.; Botez, R.M. Horizontal flight trajectories optimisation for commercial aircraft through a flight management system. Aeronaut. J. 2014, 118, 1499–1518. [Google Scholar] [CrossRef]
- Patrón RS, F.; Botez, R.M.; Labour, D. Vertical profile optimization for the Flight Management System CMA-9000 using the golden section search method. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; IEEE: Piscataway, NJ, USA; pp. 5482–5488. [Google Scholar]
- Hashemi, S.M.; Botez, R.M.; Grigorie, L.T. Adaptive fuzzy control of chaotic flapping relied upon lyapunov-based tuning laws. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; p. 3193. [Google Scholar]
- Hashemi, S.; Botez, R. Nonlinear adaptive fuzzy control of uncertain chaotic click mechanism flapping-wing. In CASI AERO 2019 (Laval, QC, Canada, 14–16 May 2019); Canadian Aeronautics and Space Institute: Ottawa, ON, USA, 2019. [Google Scholar]
- Boughari, Y.; Ghazi, G.; Botez, R.M.; Theel, F. New Methodology for Optimal Flight Control Using Differential Evolution Algorithms Applied on the Cessna Citation X Business Aircraft—Part 1. Design and Optimization. INCAS Bull. 2017, 9, 31. [Google Scholar]
- Boughari, Y.; Botez, R.M.; Ghazi, G.; Theel, F. Flight control clearance of the Cessna Citation X using evolutionary algorithms. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 231, 510–532. [Google Scholar] [CrossRef]
- Ghazi, G.; Botez, R.M.; Bourrely, C.; Turculet, A.-A. Method for calculating aircraft flight trajectories in presence of winds. J. Aerosp. Inf. Syst. 2021, 18, 442–463. [Google Scholar] [CrossRef]
- Hashemi, S.; Abyari, M.; Barati, S.; Tahmasebi, S.; Talati, S. A proposed method to controller parameter soft tuning as accommodation FTC after unknown input observer FDI. J. Eng. Appl. Sci. 2016, 11, 2818–2829. [Google Scholar]
- Coulter, N.; Moncayo, H. An Online Machine Learning Paradigm for Spacecraft Fault Detection. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 & 19–21 January 2021; p. 1339. [Google Scholar]
- Degas, A.; Islam, M.R.; Hurter, C.; Barua, S.; Rahman, H.; Poudel, M.; Ruscio, D.; Ahmed, M.U.; Begum, S.; Rahman, M.A. A Survey on Artificial Intelligence (AI) and eXplainable AI in Air Traffic Management: Current Trends and Development with Future Research Trajectory. Appl. Sci. 2022, 12, 1295. [Google Scholar] [CrossRef]
- Perez, A.E.; Moncayo, H.; Moguel, I.; Perhinschi, M.G.; Al Azzawi, D.; Togayev, A. Development of Immunity Based Adaptive Control Laws for Aircraft Fault Tolerance. In Proceedings of the Dynamic Systems and Control Conference, 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 46186, p. V001T03A001. [Google Scholar]
- van Iersel, Q.G.; Murrieta Mendoza, A.; Felix Patron, R.S.; Hashemi, S.M.; Botez, R.M. Attack and Defense on Aircraft Trajectory Prediction Algorithms. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 4027. [Google Scholar]
- Ghazi, G.; Botez, R.M.; Domanti, S. New methodology for aircraft performance model identification for flight management system applications. J. Aerosp. Inf. Syst. 2020, 17, 294–310. [Google Scholar] [CrossRef]
- Ghazi, G.; Gerardin, B.; Gelhaye, M.; Botez, R.M. New adaptive algorithm development for monitoring aircraft performance and improving flight management system predictions. J. Aerosp. Inf. Syst. 2020, 17, 97–112. [Google Scholar] [CrossRef]
- Ghazi, G.; Botez, R.M.; Maniette, N. Cessna Citation X takeoff and departure trajectories prediction in presence of winds. J. Aerosp. Inf. Syst. 2020, 17, 659–681. [Google Scholar] [CrossRef]
- Delahaye, D.; Puechmorel, S.; Tsiotras, P.; Féron, E. Mathematical models for aircraft trajectory design: A survey. In Air Traffic Management and Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 205–247. [Google Scholar]
- Dancila, R.; Botez, R. New flight trajectory optimisation method using genetic algorithms. Aeronaut. J. 2021, 125, 618–671. [Google Scholar] [CrossRef]
- Patrón RS, F.; Botez, R.M. Flight trajectory optimization through genetic algorithms for lateral and vertical integrated navigation. J. Aerosp. Inf. Syst. 2015, 12, 533–544. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M.; Grigorie, T.L. New reliability studies of data-driven aircraft trajectory prediction. Aerospace 2020, 7, 145. [Google Scholar] [CrossRef]
- Neumeier, M.; Betsch, M.; Tollkühn, A.; Berberich, T. Variational autoencoder-based vehicle trajectory prediction with an interpretable latent space. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC); IEEE: Piscataway, NJ, USA, 2021; pp. 820–827. [Google Scholar]
- Murray, B.; Perera, L.P. A dual linear autoencoder approach for vessel trajectory prediction using historical AIS data. Ocean. Eng. 2020, 209, 107478. [Google Scholar] [CrossRef]
- Zeng, W.; Xu, Z.; Cai, Z.; Chu, X.; Lu, X. Aircraft trajectory clustering in terminal airspace based on deep autoencoder and gaussian mixture model. Aerospace 2021, 8, 266. [Google Scholar] [CrossRef]
- Ivanovic, B.; Leung, K.; Schmerling, E.; Pavone, M. Multimodal deep generative models for trajectory prediction: A conditional variational autoencoder approach. IEEE Robot. Autom. Lett. 2020, 6, 295–302. [Google Scholar] [CrossRef]
- Nasreen, M.; Ganesh, A.; Sunitha, C. A study on Byzantine fault tolerance methods in distributed networks. Procedia Comput. Sci. 2016, 87, 50–54. [Google Scholar] [CrossRef]
- Burke, E.K.; Burke, E.K.; Kendall, G.; Kendall, G. Search Methodologies: Introductory Tutorials in Optimization and Decision Support Techniques; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Liu, M. Robotic online path planning on point cloud. IEEE Trans. Cybern. 2015, 46, 1217–1228. [Google Scholar] [CrossRef]
- Maurer, A.; Tixeuil, S. Containing byzantine failures with control zones. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 362–370. [Google Scholar] [CrossRef]
- Zegers, F.M.; Hale, M.T.; Shea, J.M.; Dixon, W.E. Event-triggered formation control and leader tracking with resilience to byzantine adversaries: A reputation-based approach. IEEE Trans. Control Netw. Syst. 2021, 8, 1417–1429. [Google Scholar] [CrossRef]
- Mokhtar, A.; Murphy, N.; Bruton, J. Blockchain-based multi-robot path planning. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT); IEEE: Piscataway, NJ, USA, 2019; pp. 584–589. [Google Scholar]
- Cheng, Z.; Zhao, L.; Shi, Z. Decentralized Multi-UAV Path Planning Based on Two-Layer Coordinative Framework for Formation Rendezvous. IEEE Access 2022, 10, 45695–45708. [Google Scholar] [CrossRef]
- Buterin, V. A next-generation smart contract and decentralized application platform. White Pap. 2014, 3, 36. [Google Scholar]
- Castelló Ferrer, E. The blockchain: A new framework for robotic swarm systems. In Proceedings of the Future Technologies Conference; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1037–1058. [Google Scholar]
- De Campos MG, S.; Chanel, C.P.; Chauffaut, C.; Lacan, J. Towards a Blockchain-Based Multi-UAV Surveillance System. Front. Robot. AI 2021, 8, 557692. [Google Scholar] [CrossRef]
- Nguyen, N.; Quanz, B. Temporal latent auto-encoder: A method for probabilistic multivariate time series forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 9117–9125. [Google Scholar]
- Michelucci, U. An introduction to autoencoders. arXiv 2022, arXiv:2201.03898. [Google Scholar]
- Andersson, O.; Ljungqvist, O.; Tiger, M.; Axehill, D.; Heintz, F. Receding-horizon lattice-based motion planning with dynamic obstacle avoidance. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC); IEEE: Piscataway, NJ, USA, 2018; pp. 4467–4474. [Google Scholar]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Alharby, M.; Van Moorsel, A. Blockchain-based smart contracts: A systematic mapping study. arXiv 2017, arXiv:1710.06372. [Google Scholar]
- Hashemi, S.M.; Botez, R.M. Support Vector Regression Application for the Flight Dynamics New Modelling of the UAS-S4. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 2576. [Google Scholar]
- Kuitche, M.; Yañez-Badillo, H.; Botez, R.; Hashemi, S. Stabilisation, tracking and disturbance rejection control design for the UAS-S45 Bálaam. Aeronaut. J. 2022, 126, 1474–1496. [Google Scholar] [CrossRef]
- Hashemi, S.; Botez, R. Lyapunov-based robust adaptive configuration of the UAS-S4 flight dynamics fuzzy controller. Aeronaut. J. 2022, 126, 1187–1209. [Google Scholar] [CrossRef]
- Hashemi, S.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. A Novel Air Traffic Management and Control Methodology using Fault-Tolerant Autoencoder and FP2P Blockchain Application on the UAS-S4 Ehécatl. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 2190. [Google Scholar]
- Hashemi, S.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. Attack-tolerant Trajectory Prediction using Generative Adversarial Network Secured by Blockchain Application to the UAS-S4 Ehécatl. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 2192. [Google Scholar]
- Hashemi, S.M.; Botez, R.M. A Novel Flight Dynamics Modeling Using Robust Support Vector Regression against Adversarial Attacks. SAE Int. J. Aerosp. 2023, 16, 19. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Wingspan | 4.2 m |
| Wing area | 2.3 m2 |
| Total length | 2.5 m |
| Mean aerodynamic chord | 0.57 m |
| Empty weight | 50 kg |
| Maximum take-off weight | 80 kg |
| Loitering airspeed | 35 knots |
| Maximum speed | 135 knots |
| Service ceiling | 15,000 ft |
| Operational range | 120 km |
| Data Failures | Prediction Accuracy % | Precision | ||
|---|---|---|---|---|
| LSTM | Autoencoder | LSTM | Autoencoder | |
| No failures | 99.5 | 98.7 | 0.01 | 0.01 |
| Latitude | 91.6 | 98.1 | 0.04 | 0.03 |
| Latitude and heading | 83.2 | 95.3 | 0.06 | 0.04 |
| Latitude, altitude, and speed | 58.7 | 91.2 | 0.10 | 0.07 |
| Data Failures | Number of Neurons in the Encoder and Decoder | Number of Neurons in the Latent | Prediction Accuracy % | Error Rate % |
|---|---|---|---|---|
| Latitude | 5 | 4 | 97.8 | 4.2 |
| 3 | 97.6 | 4.1 | ||
| 4 | 3 | 98.1 | 3.3 | |
| 2 | 43.3 | 17 | ||
| Latitude and Heading | 5 | 4 | 94.9 | 5.2 |
| 3 | 94.6 | 6.3 | ||
| 4 | 3 | 95.3 | 4.4 | |
| 2 | 39.2 | 16.6 | ||
| Latitude, Altitude, and Speed | 5 | 4 | 90.8 | 8.5 |
| 3 | 90.3 | 9.2 | ||
| 4 | 3 | 91.2 | 7.1 | |
| 2 | 32.6 | 19.8 |
| Methodology | Number of Sub-Flight Zones | Attacks Imposed? | Error Rate % |
|---|---|---|---|
| Linear Consensus Protocol (LCP) | 1 | No | 5.3 |
| Yes | 83.2 | ||
| Smart Contract-based Consensus Protocol (SCCP) | 1 | No | 8.7 |
| Yes | 18.6 | ||
| Sharding-SCCP | 4 | No | 7.7 |
| Yes | 15.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashemi, S.M.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. A Novel Fault-Tolerant Air Traffic Management Methodology Using Autoencoder and P2P Blockchain Consensus Protocol. Aerospace 2023, 10, 357. https://doi.org/10.3390/aerospace10040357
Hashemi SM, Hashemi SA, Botez RM, Ghazi G. A Novel Fault-Tolerant Air Traffic Management Methodology Using Autoencoder and P2P Blockchain Consensus Protocol. Aerospace. 2023; 10(4):357. https://doi.org/10.3390/aerospace10040357
Chicago/Turabian StyleHashemi, Seyed Mohammad, Seyed Ali Hashemi, Ruxandra Mihaela Botez, and Georges Ghazi. 2023. "A Novel Fault-Tolerant Air Traffic Management Methodology Using Autoencoder and P2P Blockchain Consensus Protocol" Aerospace 10, no. 4: 357. https://doi.org/10.3390/aerospace10040357
APA StyleHashemi, S. M., Hashemi, S. A., Botez, R. M., & Ghazi, G. (2023). A Novel Fault-Tolerant Air Traffic Management Methodology Using Autoencoder and P2P Blockchain Consensus Protocol. Aerospace, 10(4), 357. https://doi.org/10.3390/aerospace10040357