1. Introduction
In recent years, the demand for intercontinental rapid transportation has grown, as has the global demand for transportation able to orbit Earth. As a proof of those dual movements, emerging private companies are developing small or midsized rockets [
1], and research agencies are working on low-noise supersonic aircraft [
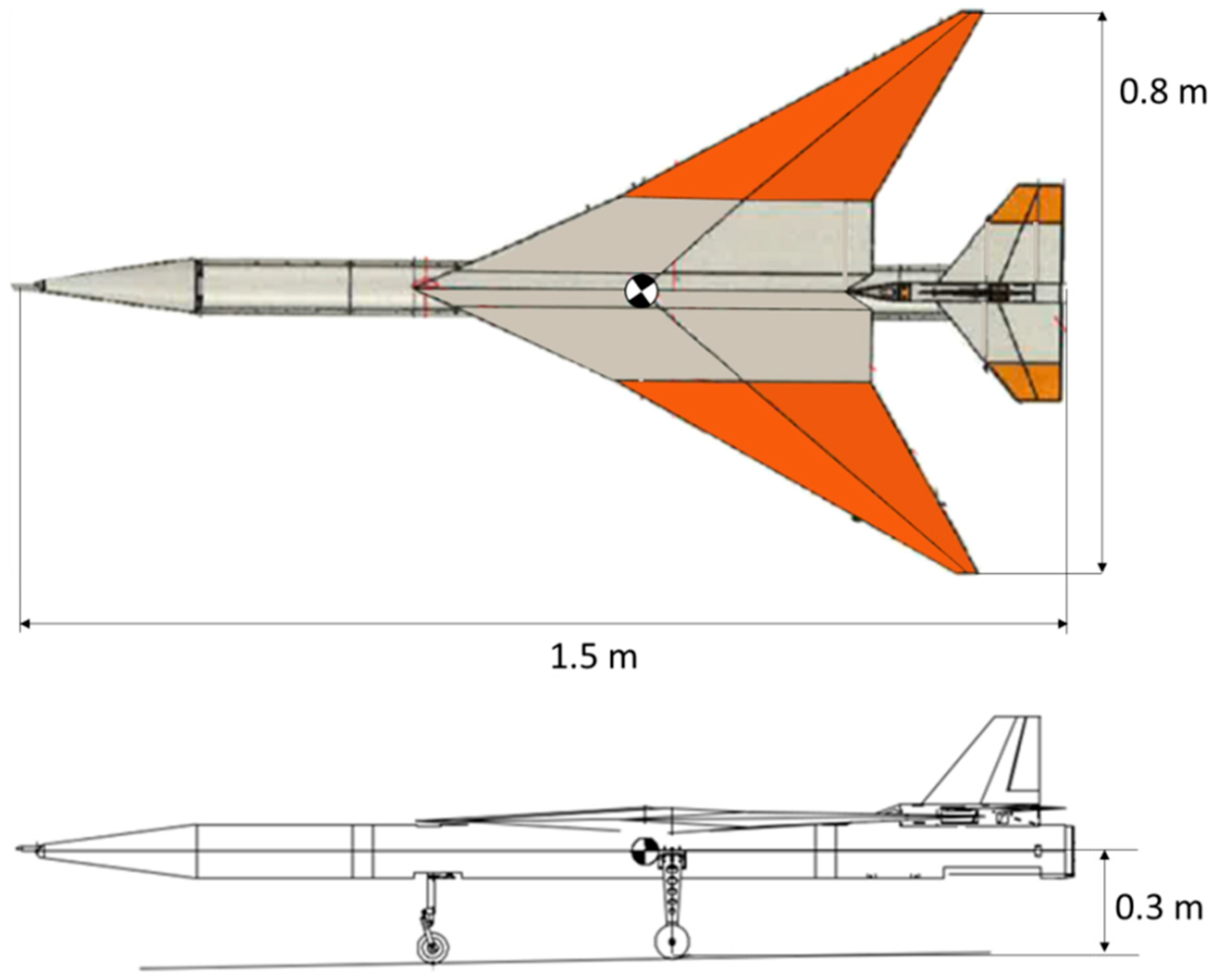
2]. In response to those demands, the Aerospace Plane Research Center at Muroran Institute of Technology has performed studies on the aerodynamics, propulsion, structure, and guidance control of high-speed, high-altitude aircraft to develop enabling technologies for those supersonic aircraft. Some of those technologies are to be verified using a one-third-scale Oowashi aircraft (
Figure 1) as a testbed for flight.
The cruise speed of one-third-scale Oowashi aircraft is designed to be around 50 m/s [
3], and the high-speed aircraft should shorten the landing distance in order to land on an ordinary runway. To realize it, the speed in the landing phase should be ideally reduced to be above and near stall speed [
4]. Therefore, this study aimed at developing landing technology which can shorten the air distance of landing by clarifying the relationship of angle of attack (AoA) of the aircraft with its speed.
In the field of short distance landing technology for unmanned aerial vehicles (UAVs), vertical takeoff and landing (VTOL) technologies have been extensively researched [
5,
6,
7,
8] which install lift fans or propellers for lift on wing [
5] or body [
6] and design examples of UAVs with tilt wings [
7] or rotors [
8]. The VTOL equipment such as lift fans or propellers increase the weight of UAVs. Generally, as UAVs must fly a long distance by carrying required fuel and payload, so it is suitable to develop short-distance landing technologies without increasing the weight by VTOL equipment.
As a conventional technology that achieves short-distance landing without special equipment, the deep-stall landing technology [
9,
10,
11,
12] is well known and its detailed control system is introduced in [
9], and the control technology uses on-line nonlinear model predictive controller to improve the precision of maneuver of transition from level flight to deep-stall landing [
10] as well as vision-assist technology to improve usability of deep-stall landing [
11]. However, except the technology for UAVs where control surfaces and wing lie in the propeller flow stream [
12], the deep-stall landing technologies do not take into account the method to recovery from stall. In addition, landing technology usually deals with low-speed UAVs which are to be landed on a long runway. Therefore, we have investigated short-landing technologies for high speed UAVs to descend with a large glideslope angle without stalling extra equipment, which has not been tried yet. As high speed UAVs require higher redundancy, using deep-stall landing is considered not to be suitable for high-speed UAVs.
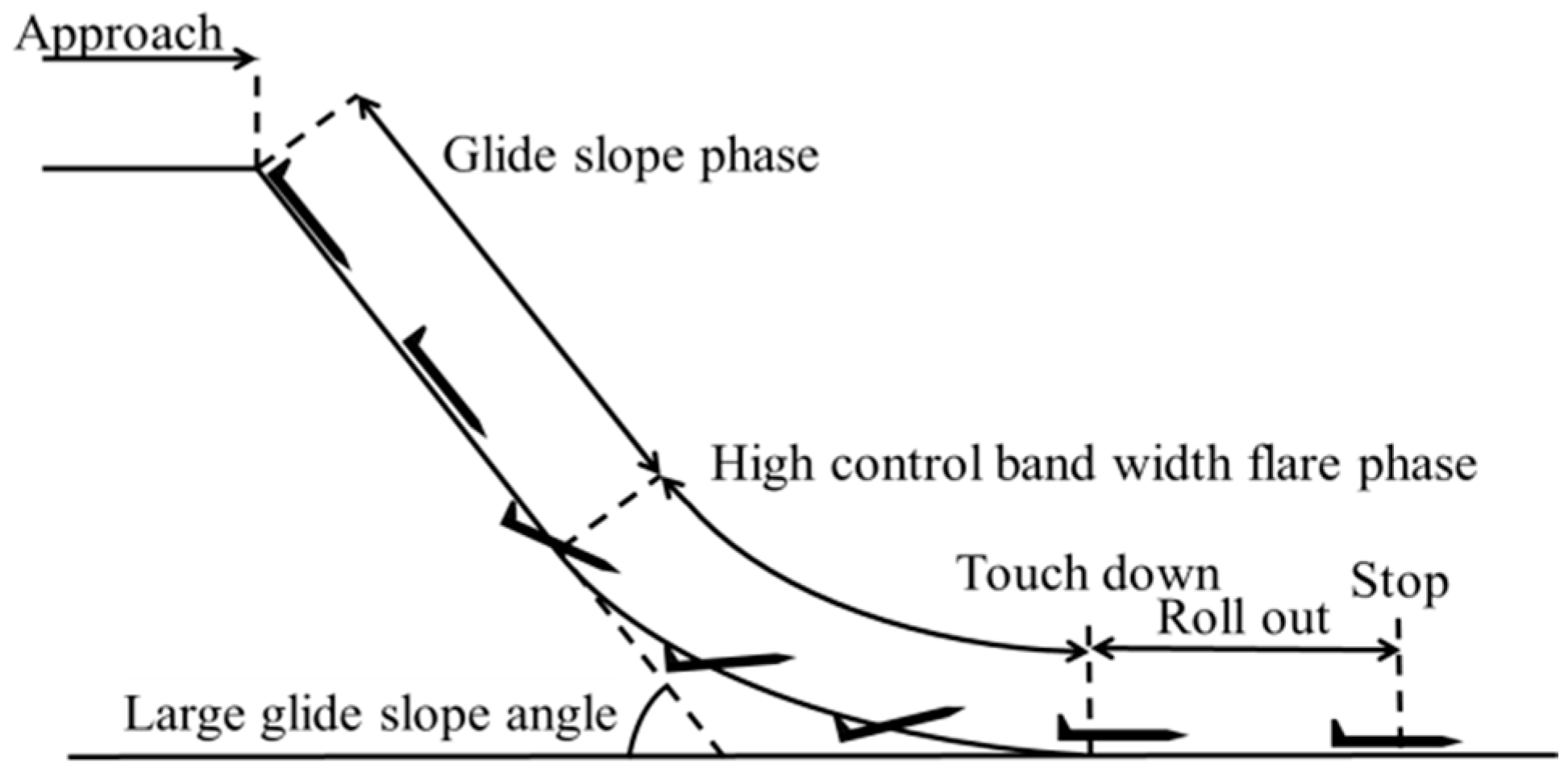
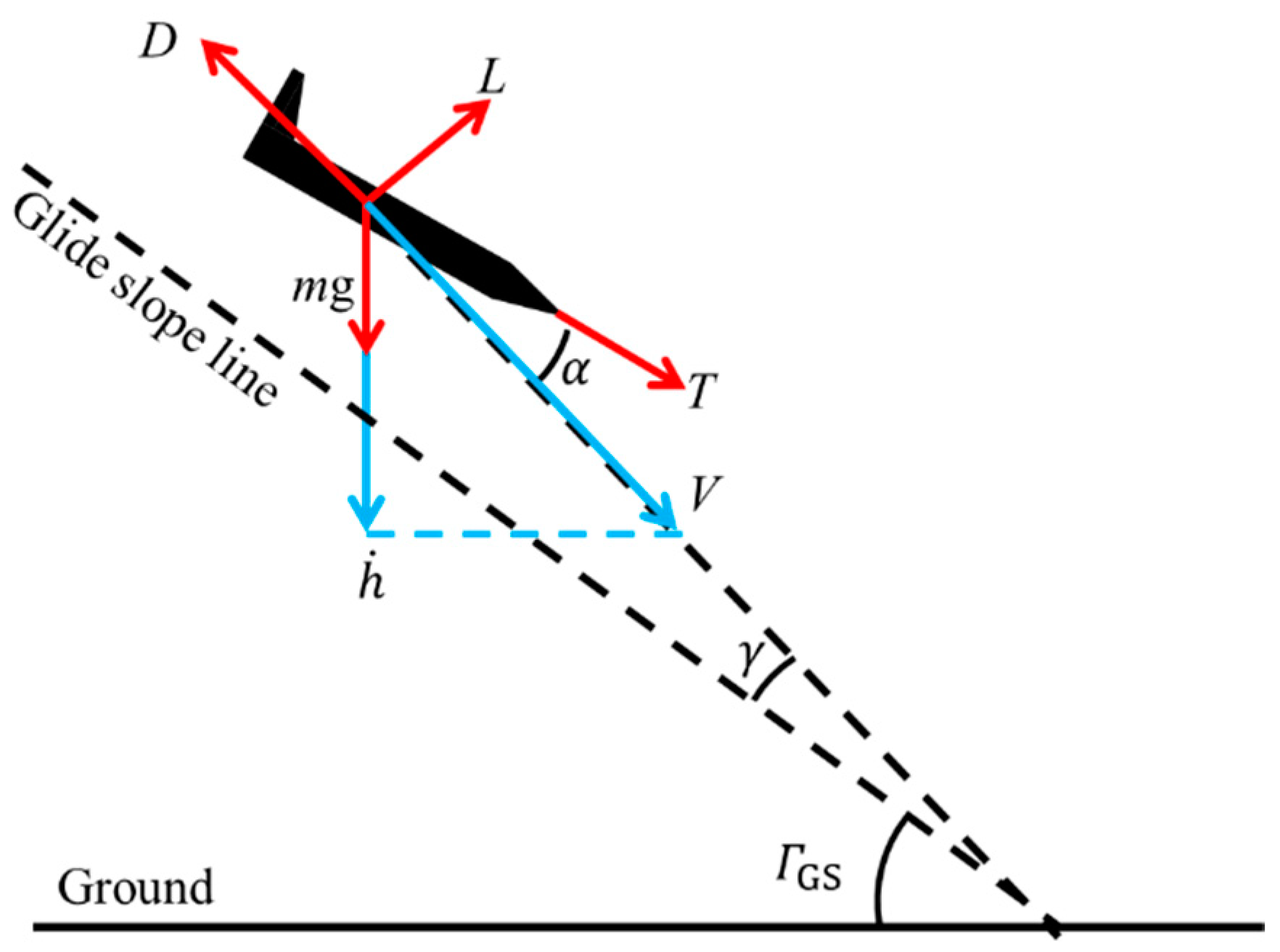
Regardless of the problem of long landing distances, there is a considerable need to shorten the landing distance to improve the use of fixed-wing UAVs in future. To our knowledge, no study has examined short-distance landing technology considering stall AoA for design of parameter fixed-wing high-speed UAV landings despite the deep-stall. To shorten the landing distance, it is very effective to increase AoA within a limitation of stall, because higher AoA increases lifts and drags and contributes to reducing landing speeds and maintaining the descent rate. Conventionally, there are several constraints for landing parameters from characteristics of UAVs. In this article, we therefore propose a new method that will utilize a high glideslope angle and high bandwidth flare control to facilitate short-distance landing with fixed-wing UAVs. In constraints of not exceeding stall AoA, high glideslope angle and a small flare time constant enable short landing distances. At first, we have analytically clarified the limits of the glideslope angle and the flare time constant with respect to AoA. Then, the proposed method was later applied to the landings of a one-third-scale Oowashi aircraft via 6-degrees-of-freedom simulations to confirm its validity. In that simulation result, the landing distance is well reduced compared with the conventional one avoiding increase speed.
In what follows,
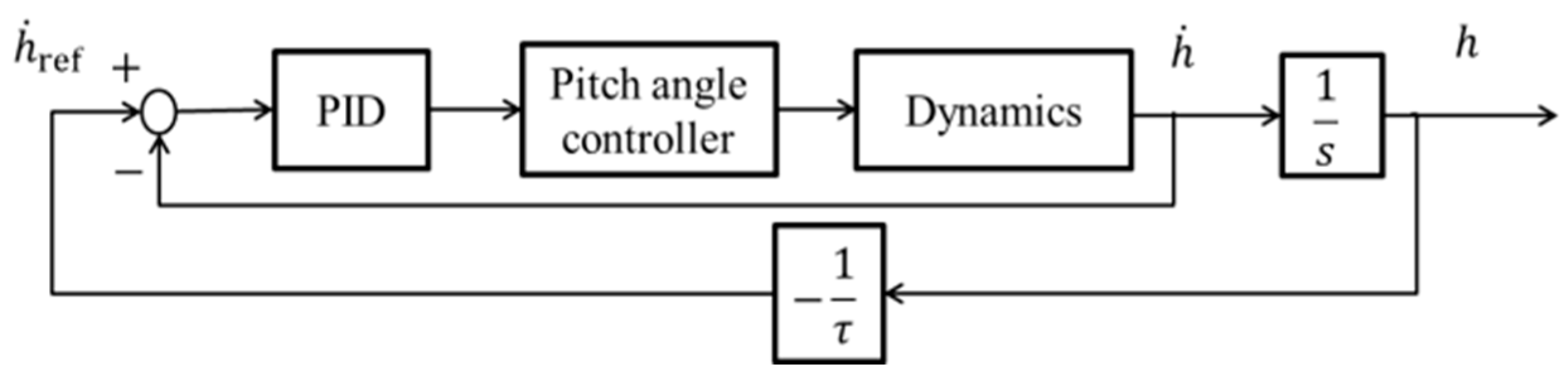
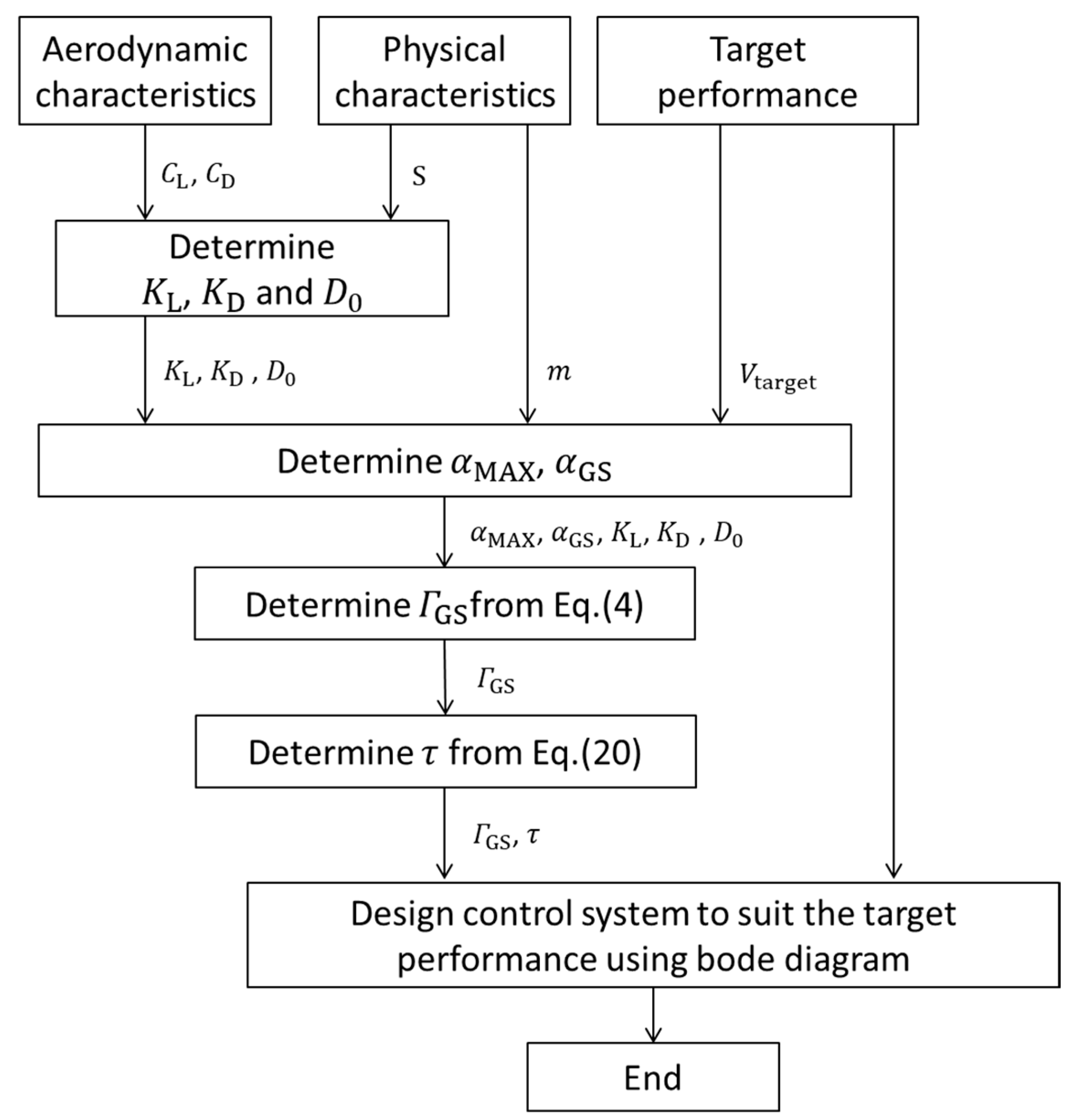
Section 2 describes the new design method of the parameters of the landing control system with AoA angle considered,
Section 3 describes the results of adapting the proposed method to the one-third-scale Oowashi, and
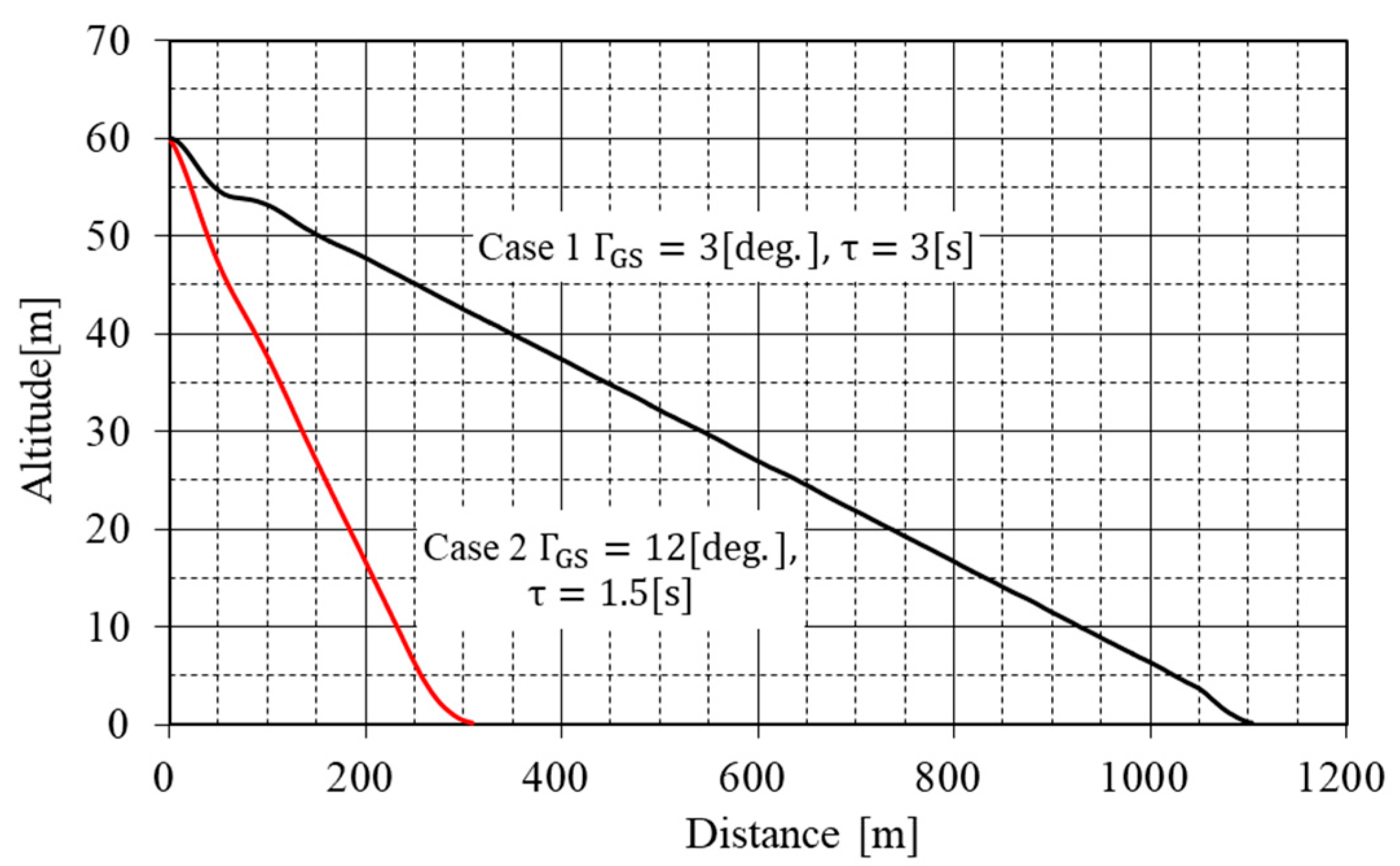
Section 4 describes the results of the simulation.
5. Conclusions
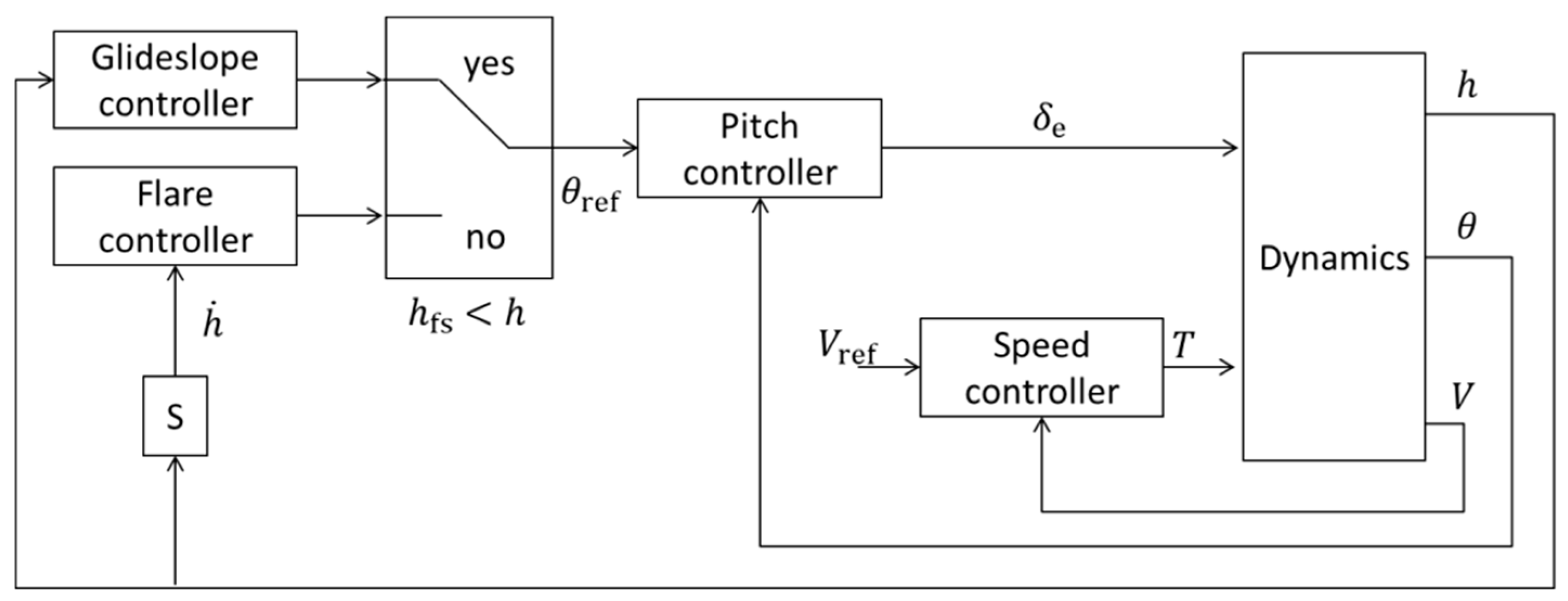
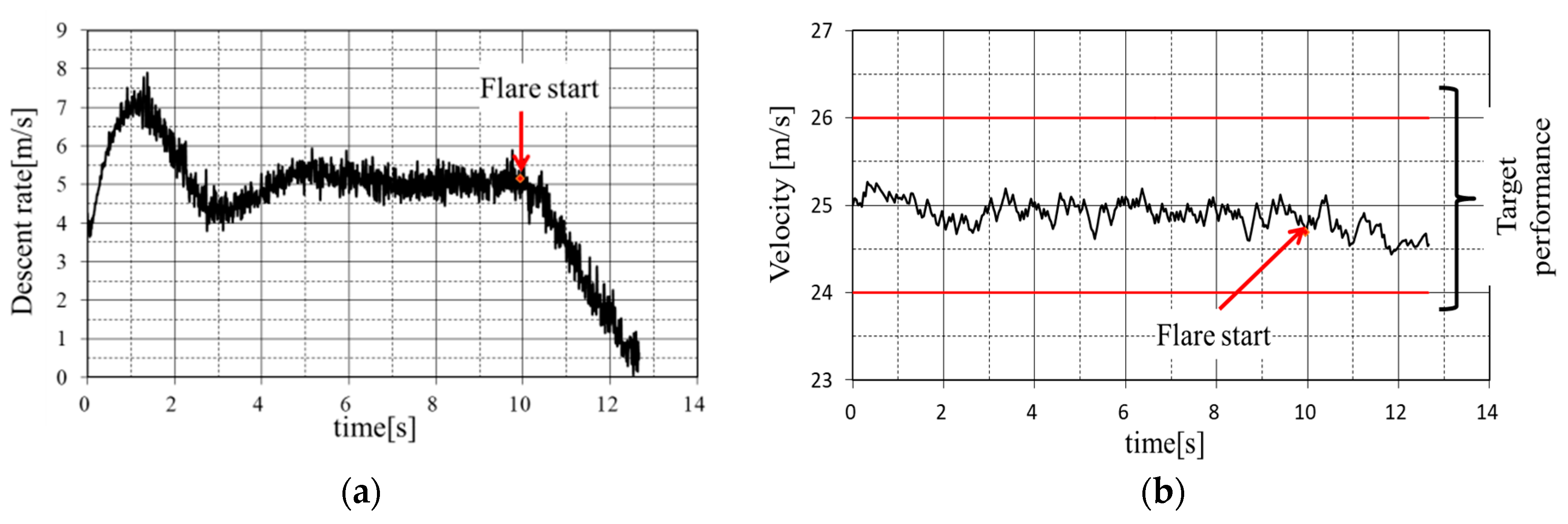
From the results presented in the previous section, the proposed method worked very well, as intended. The simulations confirmed that it is possible to greatly reduce land-ing distances with the method and that the landing control system during glideslope phase maintained an AoA of 10 deg., within maximum AoA, and contributed to maintaining airspeed at 25 m/s and that the time constant during flare phase was maintained at the limited descent rate of 1 m/s without exceeding the stall AoA. The conclusion of this paper is that it is possible to design larger glideslope angle and smaller flare time constant by determining the maximum or nominal AoA in each phase to shorten the landing distance. In the future, a flight experiment using conventional fixed-wing UAVs with the weight, wingspan, and length around 6 kg, 2 m, and 2 m, respectively. After that, the flight experiment using the one-third-scale Oowashi will be conducted to prove the validity of the method.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}