
Understanding the Early Stage of Planet Formation: Design and Demonstration of the Space Experimental Apparatus


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
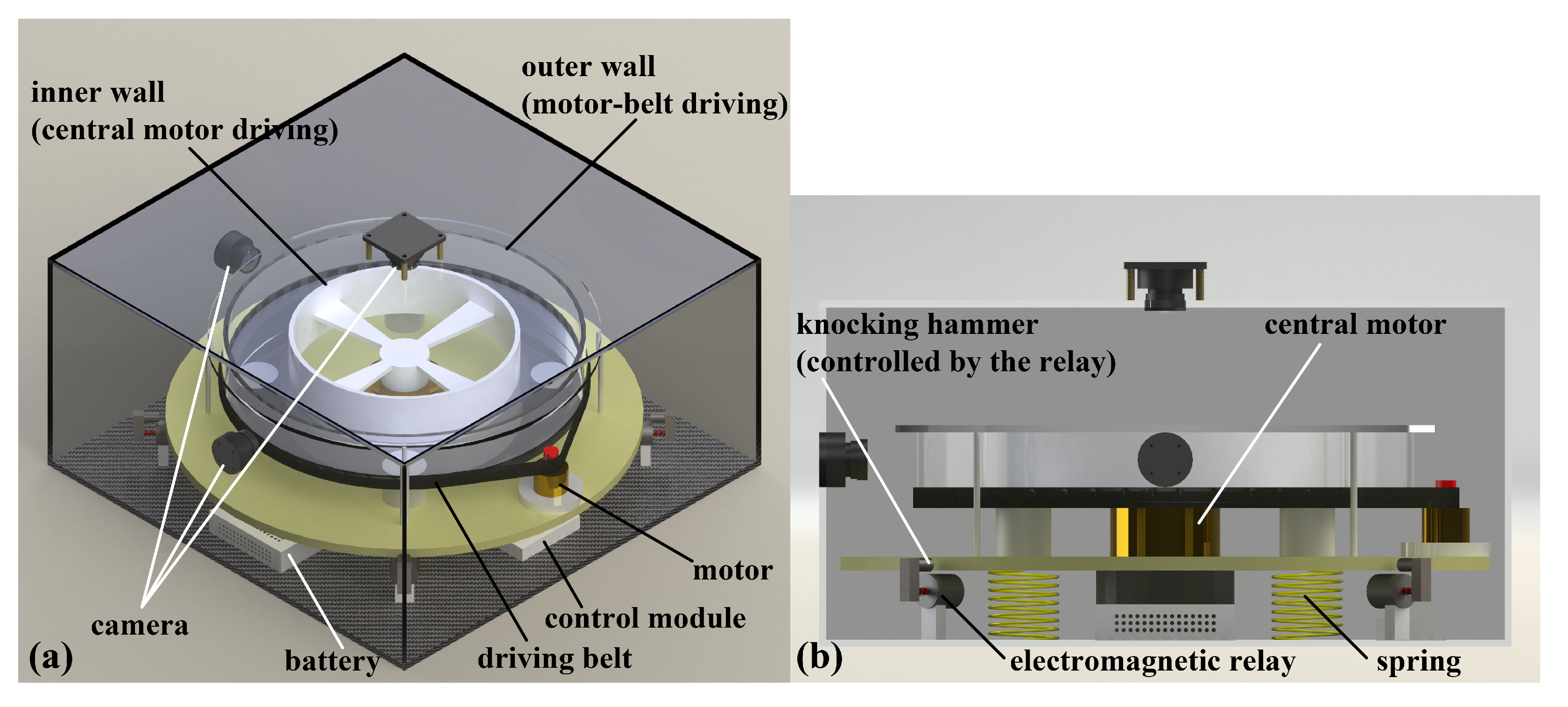
2. Experimental Design
3. Numerical Experiments
3.1. Method and Tool
3.2. Simulation Setup
3.3. Results
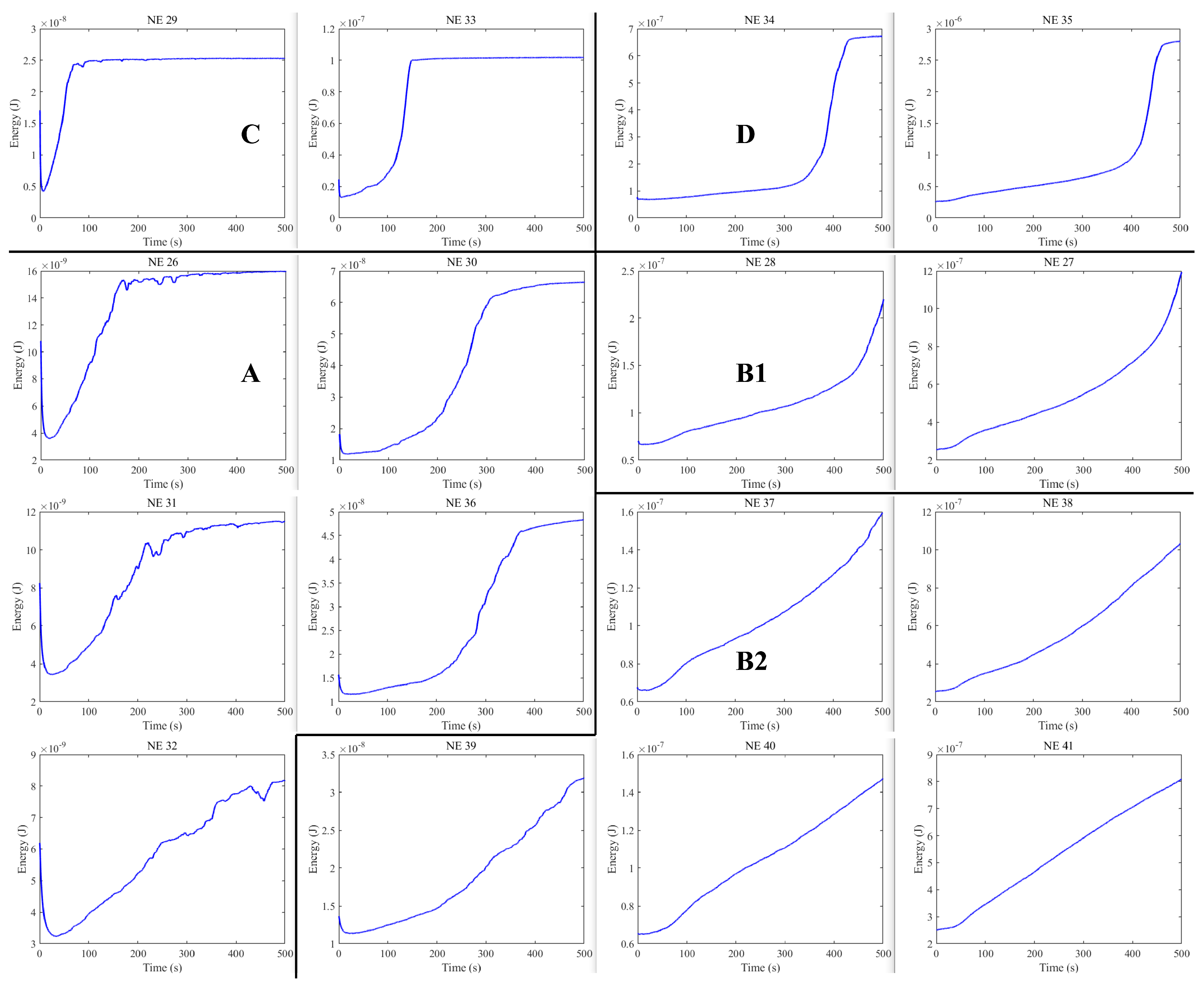
3.3.1. Evolutionary Paths Structured in the Parameter Space
- A.
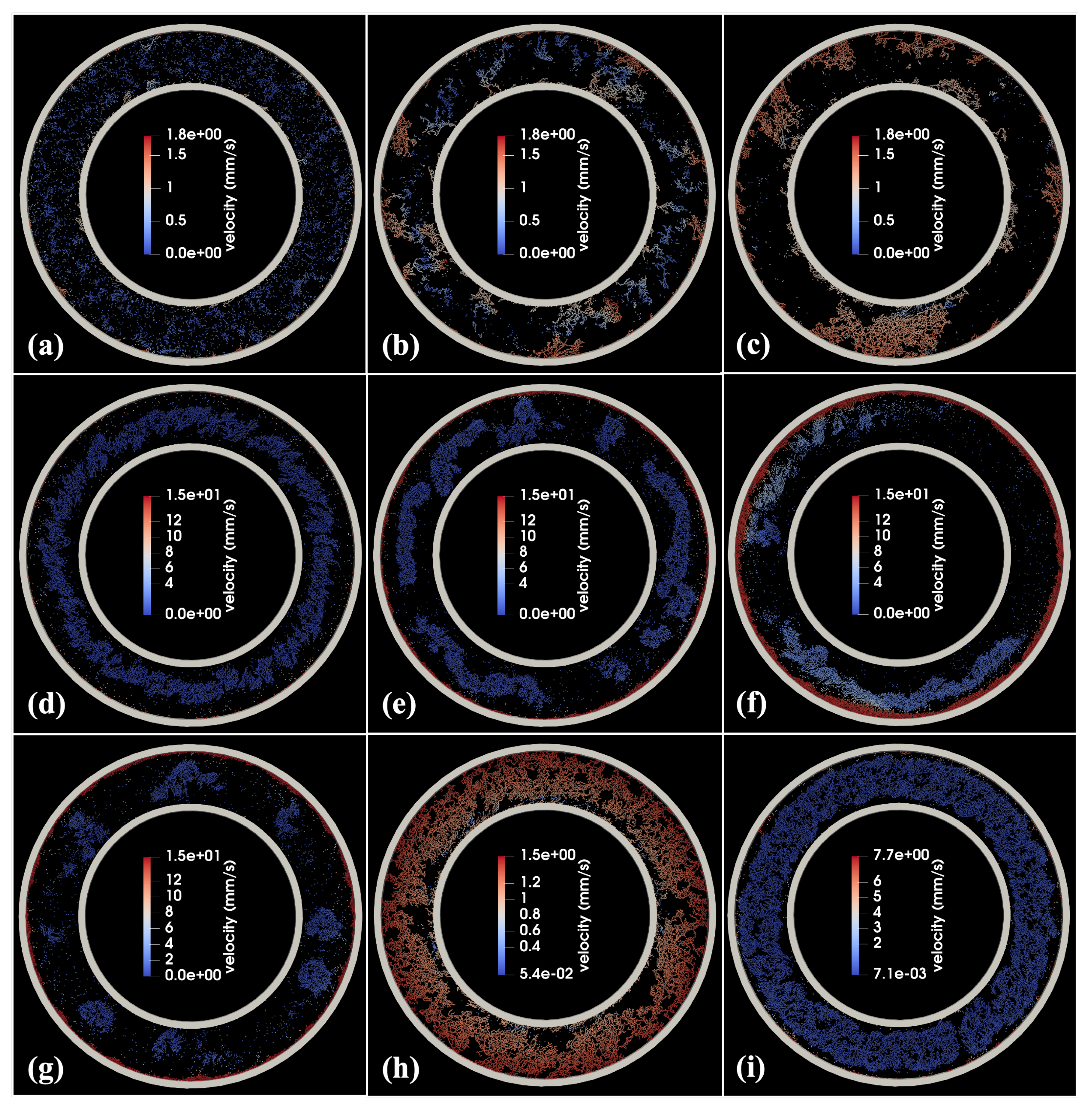
- First, the hit-and-stick growth of particles is observed, forming the fractal agglomerates. Mutual collisions and shear actions of agglomerates are followed, during which the cluster–cluster interaction is dominated instead of particle–cluster interaction. The fractal agglomerates continually stick and grow into big blocks, while interactions between clusters break off a small portion of branched structures. The agglomerates generally maintain the structural porosity, and finally attach to the walls and rotate with the walls (see Figure 4a–c).
- B.
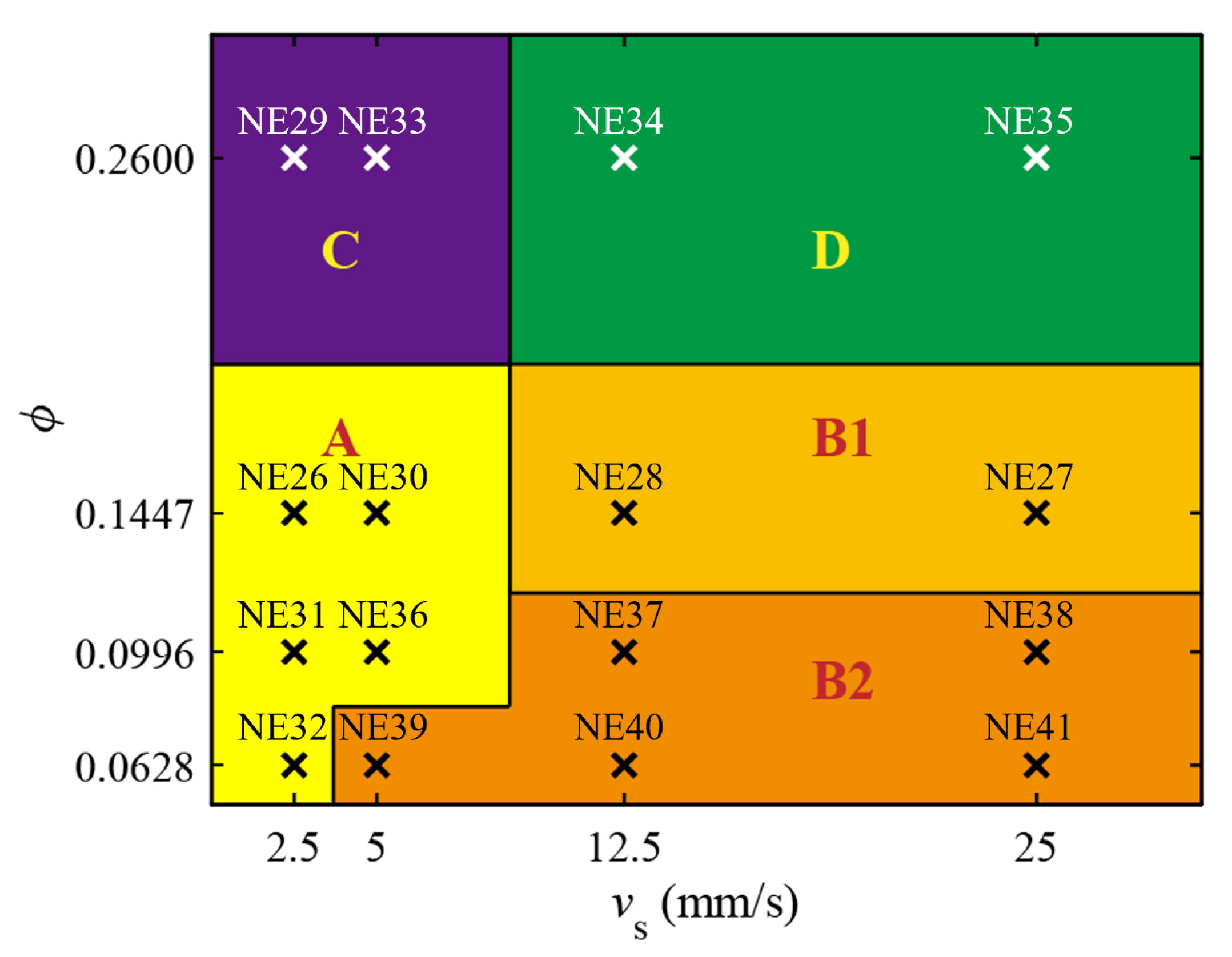
- The hit-and-stick growth of the particles rapidly leads to the formation of centimeter-sized loose agglomerates. The subsequent evolution is dominated by particle–cluster collision: centimeter-sized clusters floating between the two walls are constantly impacted by scattered particles, which produces cluster restructuring, fragmentation, and collapse. Finally, most particles attaching to the outer walls rotate with the walls (see Figure 4d–f). There are also differences for the intermediate centimeter-sized clusters in different filling factors. Compared with agglomerates generated in the condition of lower filling factors (as shown in the deep orange region B2 of Figure 3), the agglomerates in the higher filling factors (the light orange region B1 of Figure 3) are larger in size, have stronger resistance for particle impact, and live for a longer time before fragmentation (compare Figure 4e with Figure 4g).
- C.
- Particles agglomerate and quickly form big and fractal blocks attaching to the outer wall, similar to freezing fractal clusters (see Figure 4h).
- D.
- Particles agglomerate and quickly form big blocks between the inner and outer walls, which are impacted by a few scattered particles (see Figure 4i).
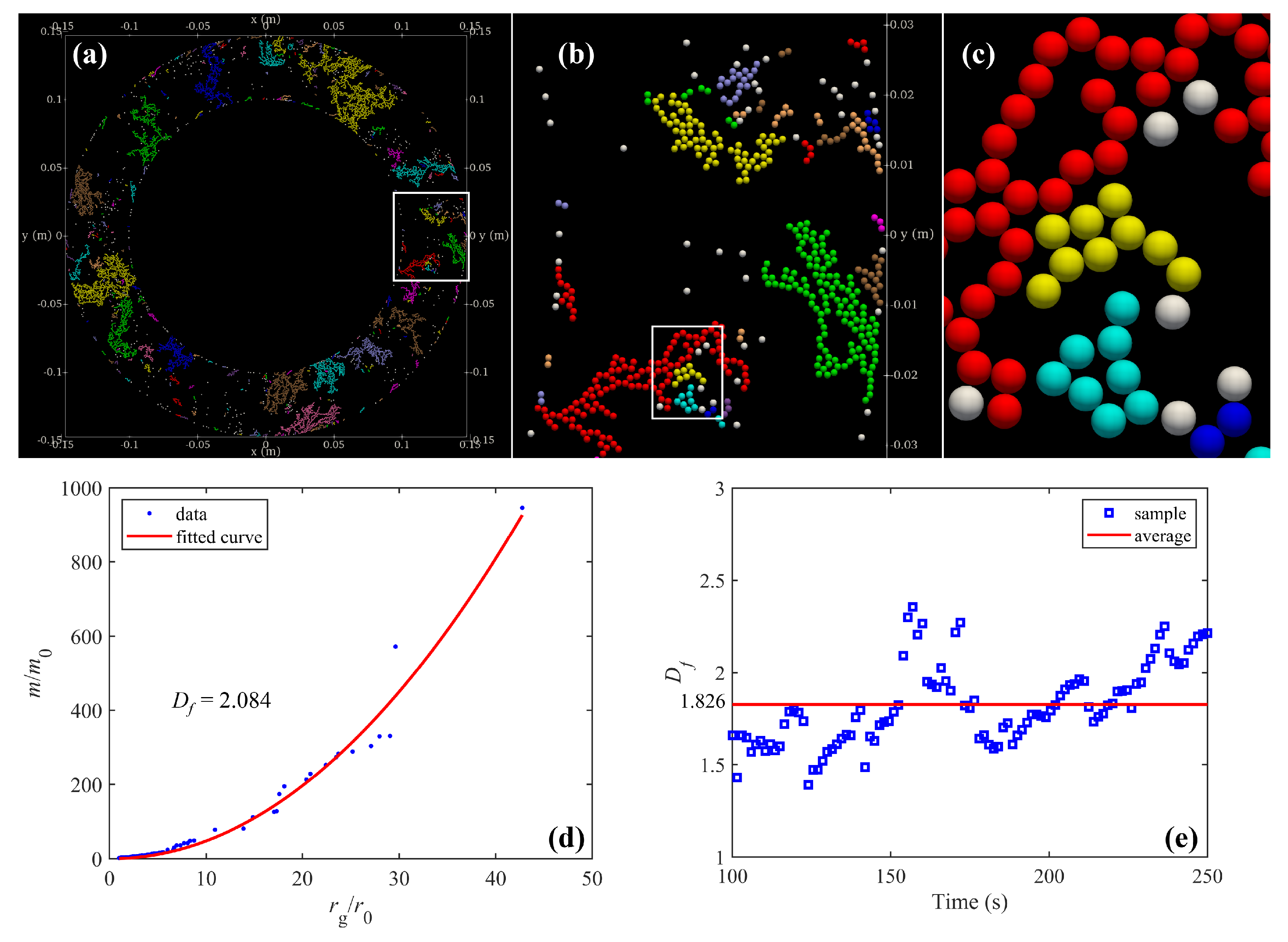
3.3.2. Fractal Characteristics of Agglomerates
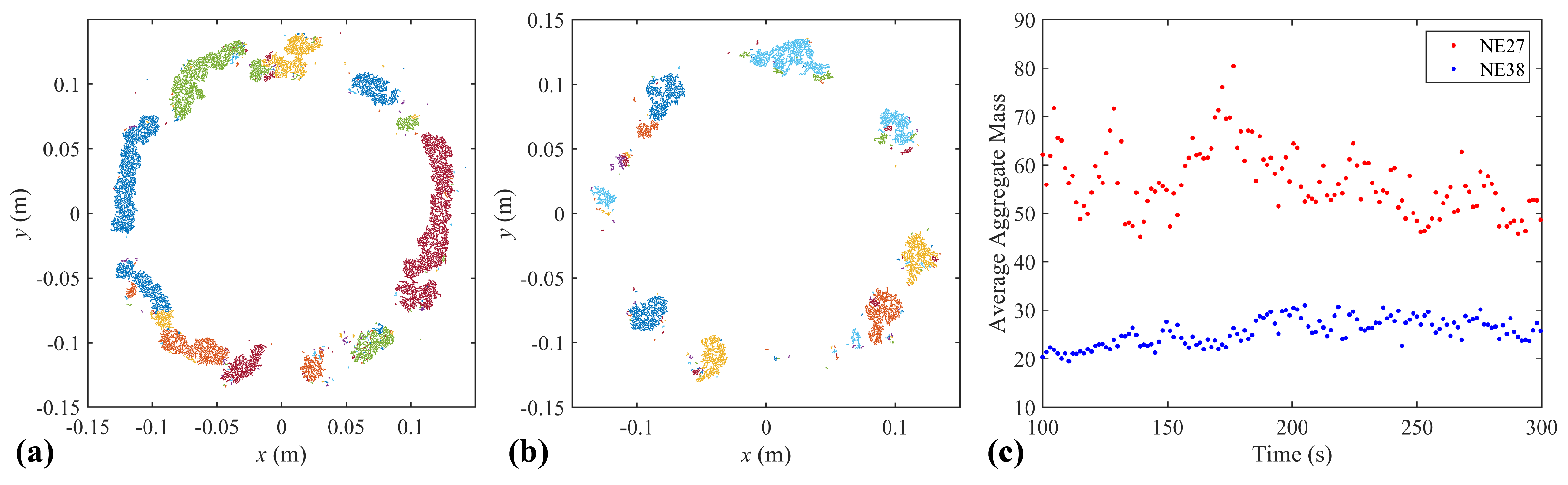
3.3.3. Stage of Growth Stalling
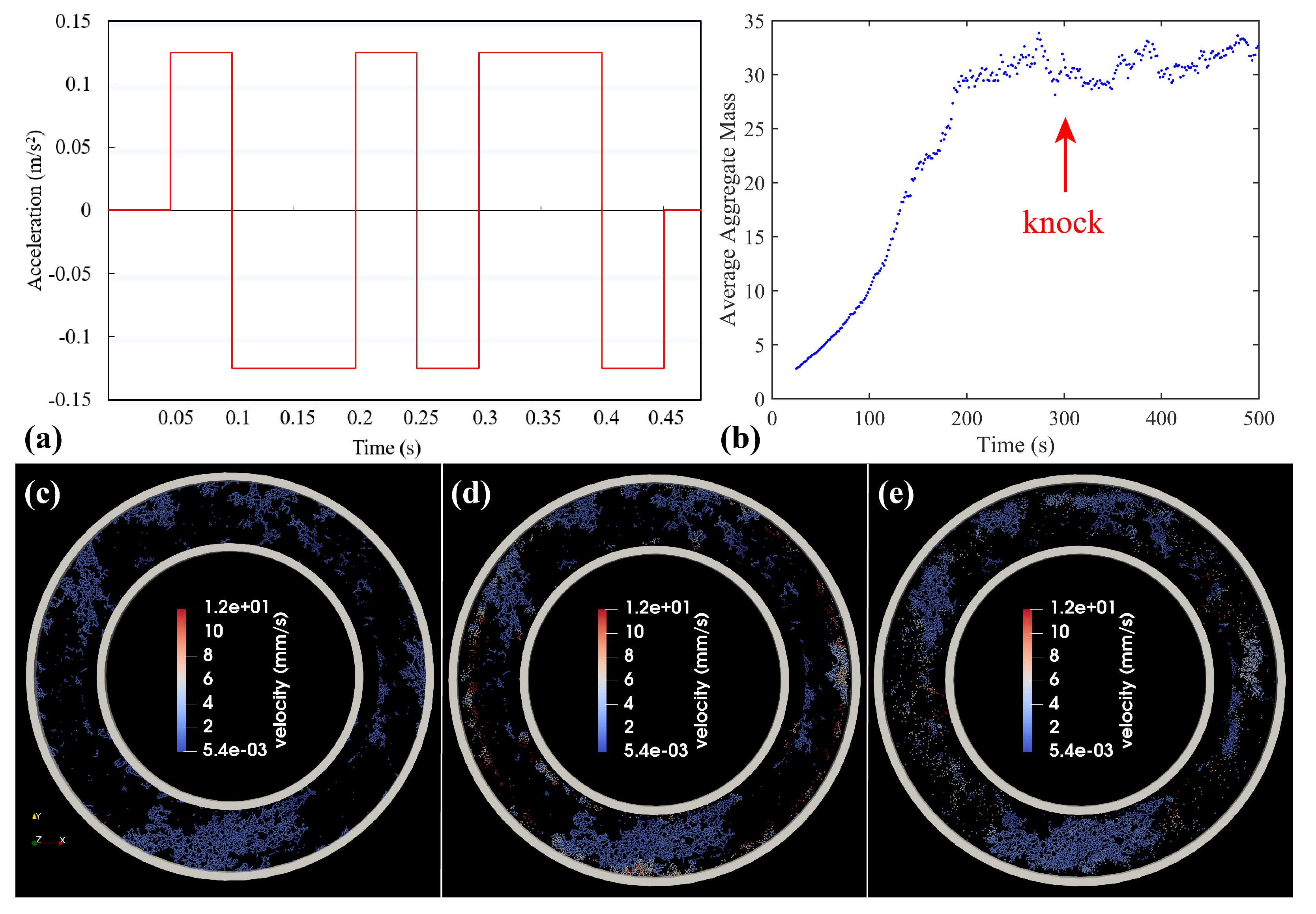
3.3.4. Knocking–Expelling Mechanism Simulations
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Keppler, M.; Benisty, M.; Müller, A.; Henning, T.; Van Boekel, R.; Cantalloube, F.; Ginski, C.; Van Holstein, R.; Maire, A.L.; Pohl, A.; et al. Discovery of a planetary-mass companion within the gap of the transition disk around PDS 70. Astron. Astrophys. 2018, 617, A44. [Google Scholar]
- Zhu, W.; Dong, S. Exoplanet statistics and theoretical implications. Annu. Rev. Astron. Astrophys. 2021, 59, 291–336. [Google Scholar]
- Blum, J.; Wurm, G. The growth mechanisms of macroscopic bodies in protoplanetary disks. Annu. Rev. Astron. Astrophys. 2008, 46, 21–56. [Google Scholar] [CrossRef]
- Wurm, G. Selective aggregation experiments on planetesimal formation and Mercury-like planets. Geosciences 2018, 8, 310. [Google Scholar]
- Wurm, G.; Teiser, J. Understanding planet formation using microgravity experiments. Nat. Rev. Phys. 2021, 3, 405–421. [Google Scholar]
- Johansen, A.; Blum, J.; Tanaka, H.; Ormel, C.; Bizzarro, M.; Rickman, H. The multifaceted planetesimal formation process. arXiv 2014, arXiv:1402.1344. [Google Scholar]
- Morbidelli, A.; Raymond, S.N. Challenges in planet formation. J. Geophys. Res. Planets 2016, 121, 1962–1980. [Google Scholar]
- Crovisier, J.; Encrenaz, T.R.S. Comet Science: The Study of Remnants from the Birth of the Solar System; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Asphaug, E. Growth and evolution of asteroids. Annu. Rev. Earth Planet. Sci. 2009, 37, 413–448. [Google Scholar]
- Biele, J.; Ulamec, S.; Maibaum, M.; Roll, R.; Witte, L.; Jurado, E.; Muñoz, P.; Arnold, W.; Auster, H.U.; Casas, C.; et al. The landing(s) of Philae and inferences about comet surface mechanical properties. Science 2015, 349, aaa9816. [Google Scholar]
- Levasseur-Regourd, A.C.; Agarwal, J.; Cottin, H.; Engrand, C.; Flynn, G.; Fulle, M.; Gombosi, T.; Langevin, Y.; Lasue, J.; Mannel, T.; et al. Cometary dust. Space Sci. Rev. 2018, 214, 64. [Google Scholar]
- Lasue, J.; Maroger, I.; Botet, R.; Garnier, P.; Merouane, S.; Mannel, T.; Levasseur-Regourd, A.C.; Bentley, M. Flattened loose particles from numerical simulations compared to particles collected by Rosetta. Astron. Astrophys. 2019, 630, A28. [Google Scholar]
- Fayolle, E.C.; Öberg, K.I.; Jørgensen, J.K.; Altwegg, K.; Calcutt, H.; Müller, H.S.; Rubin, M.; van der Wiel, M.H.; Bjerkeli, P.; Bourke, T.L.; et al. Protostellar and cometary detections of organohalogens. Nat. Astron. 2017, 1, 703–708. [Google Scholar]
- Mannel, T.; Bentley, M.S.; Schmied, R.; Jeszenszky, H.; Levasseur-Regourd, A.C.; Torkar, J.R.K. Fractal cometary dust—A window into the early Solar system. Mon. Not. R. Astron. Soc. 2016, 462, S304–S311. [Google Scholar] [CrossRef]
- Watanabe, S.; Hirabayashi, M.; Hirata, N.; Hirata, N.; Noguchi, R.; Shimaki, Y.; Ikeda, H.; Tatsumi, E.; Yoshikawa, M.; Kikuchi, S.; et al. Hayabusa2 arrives at the carbonaceous asteroid 162173 Ryugu—A spinning top–shaped rubble pile. Science 2019, 364, 268–272. [Google Scholar]
- Walsh, K.J.; Ballouz, R.L.; Jawin, E.R.; Avdellidou, C.; Barnouin, O.S.; Bennett, C.A.; Bierhaus, E.B.; Bos, B.J.; Cambioni, S.; Connolly, H.C., Jr.; et al. Near-zero cohesion and loose packing of Bennu’s near subsurface revealed by spacecraft contact. Sci. Adv. 2022, 8, eabm6229. [Google Scholar]
- Weiss, B.P.; Elkins-Tanton, L.T. Differentiated planetesimals and the parent bodies of chondrites. Annu. Rev. Earth Planet. Sci. 2013, 41, 529–560. [Google Scholar] [CrossRef]
- Scott, E.; Krot, A. Chondrites and their components. Treatise Geochem. 2003, 1, 711. [Google Scholar]
- Liu, B.; Ji, J. A tale of planet formation: From dust to planets. Res. Astron. Astrophys. 2020, 20, 164. [Google Scholar]
- Krijt, S.; Ormel, C.W.; Dominik, C.; Tielens, A.G. A panoptic model for planetesimal formation and pebble delivery. Astron. Astrophys. 2016, 586, A20. [Google Scholar] [CrossRef]
- Birnstiel, T.; Klahr, H.; Ercolano, B. A simple model for the evolution of the dust population in protoplanetary disks. Astron. Astrophys. 2012, 539, A148. [Google Scholar]
- Wurm, G.; Blum, J. Experiments on preplanetary dust aggregation. Icarus 1998, 132, 125–136. [Google Scholar] [CrossRef]
- Blum, J.; Wurm, G. Experiments on sticking, restructuring, and fragmentation of preplanetary dust aggregates. Icarus 2000, 143, 138–146. [Google Scholar] [CrossRef]
- Kelling, T.; Wurm, G.; Köster, M. Experimental study on bouncing barriers in protoplanetary disks. Astrophys. J. 2014, 783, 111. [Google Scholar] [CrossRef]
- Kruss, M.; Demirci, T.; Koester, M.; Kelling, T.; Wurm, G. Failed growth at the bouncing barrier in planetesimal formation. Astrophys. J. 2016, 827, 110. [Google Scholar] [CrossRef]
- Kruss, M.; Teiser, J.; Wurm, G. Growing into and out of the bouncing barrier in planetesimal formation. Astron. Astrophys. 2017, 600, A103. [Google Scholar] [CrossRef]
- Blum, J.; Wurm, G.; Kempf, S.; Poppe, T.; Klahr, H.; Kozasa, T.; Rott, M.; Henning, T.; Dorschner, J.; Schräpler, R.; et al. Growth and form of planetary seedlings: Results from a microgravity aggregation experiment. Phys. Rev. Lett. 2000, 85, 2426. [Google Scholar] [CrossRef]
- Scheeres, D.J.; Hartzell, C.M.; Sanchez, P.; Swift, M. Scaling forces to asteroid surfaces: The role of cohesion. Icarus 2010, 210, 968–984. [Google Scholar] [CrossRef]
- Perko, H.A.; Nelson, J.D.; Sadeh, W.Z. Surface cleanliness effect on lunar soil shear strength. J. Geotech. Geoenviron. Eng. 2001, 127, 371–383. [Google Scholar] [CrossRef]
- Li, Z.; Zeng, X.; Wen, T.; Zhang, Y. Numerical Comparison of Contact Force Models in the Discrete Element Method. Aerospace 2022, 9, 737. [Google Scholar]
- Cheng, B.; Yu, Y.; Baoyin, H. Collision-based understanding of the force law in granular impact dynamics. Phys. Rev. E 2018, 98, 012901. [Google Scholar] [CrossRef]
- Cheng, B.; Yu, Y.; Baoyin, H. Numerical simulations of the controlled motion of a hopping asteroid lander on the regolith surface. Mon. Not. R. Astron. Soc. 2019, 485, 3088–3096. [Google Scholar] [CrossRef]
- Cheng, B.; Yu, Y.; Asphaug, E.; Michel, P.; Richardson, D.C.; Hirabayashi, M.; Yoshikawa, M.; Baoyin, H. Reconstructing the formation history of top-shaped asteroids from the surface boulder distribution. Nat. Astron. 2021, 5, 134–138. [Google Scholar] [CrossRef]
- Cheng, B.; Asphaug, E.; Ballouz, R.L.; Yu, Y.; Baoyin, H. Numerical Simulations of Drainage Grooves in Response to Extensional Fracturing: Testing the Phobos Groove Formation Model. Planet. Sci. J. 2022, 3, 249. [Google Scholar] [CrossRef]
- Cheng, B.; Asphaug, E.; Yu, Y.; Baoyin, H. Measuring the mechanical properties of small body regolith layers using a granular penetrometer. Astrodynamics 2023, 7, 15–29. [Google Scholar] [CrossRef]
- Gundlach, B.; Blum, J. Regolith grain size and cohesive strength of near-Earth Asteroid (29075) 1950 DA. Icarus 2015, 257, 126–129. [Google Scholar] [CrossRef]
- Walsh, K.; Jawin, E.; Ballouz, R.L.; Barnouin, O.; Bierhaus, E.; Connolly, H.; Molaro, J.; McCoy, T.J.; Delbo, M.; Hartzell, C.; et al. Craters, boulders and regolith of (101955) Bennu indicative of an old and dynamic surface. Nat. Geosci. 2019, 12, 242–246. [Google Scholar] [CrossRef]
- Somfai, E.; Roux, J.N.; Snoeijer, J.H.; Van Hecke, M.; Van Saarloos, W. Elastic wave propagation in confined granular systems. Phys. Rev. E 2005, 72, 021301. [Google Scholar] [CrossRef]
- Jiang, M.; Shen, Z.; Wang, J. A novel three-dimensional contact model for granulates incorporating rolling and twisting resistances. Comput. Geotech. 2015, 65, 147–163. [Google Scholar] [CrossRef]
- Sánchez, P.; Scheeres, D.J. The strength of regolith and rubble pile asteroids. Meteorit. Planet. Sci. 2014, 49, 788–811. [Google Scholar] [CrossRef]
- Sánchez, P.; Scheeres, D.J. Disruption patterns of rotating self-gravitating aggregates: A survey on angle of friction and tensile strength. Icarus 2016, 271, 453–471. [Google Scholar] [CrossRef]
- Zhang, Y.; Richardson, D.C.; Barnouin, O.S.; Michel, P.; Schwartz, S.R.; Ballouz, R.L. Rotational failure of rubble-pile bodies: Influences of shear and cohesive strengths. Astrophys. J. 2018, 857, 15. [Google Scholar] [CrossRef]
- Huang, C.; Yu, Y.; Cheng, B.; Zhang, K.; Qiao, D.; Baoyin, H. Sand creep motion in slow spin-up experiment: An analog of regolith migration on asteroids. Phys. Rev. E 2021, 104, L042901. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Yang, T.; Chen, X.; Zhang, Z.; Tian, Y.; Zhang, W.; Jiang, S. Mechanical Characteristics of Lunar Regolith Drilling and Coring and Its Crawling Phenomenon: Analysis and Validation. Aerospace 2022, 9, 709. [Google Scholar] [CrossRef]
- Blum, J. Dust evolution in protoplanetary discs and the formation of planetesimals. Space Sci. Rev. 2018, 214, 52. [Google Scholar] [CrossRef]
- Ossenkopf, V. Dust coagulation in dense molecular clouds: The formation of fluffy aggregates. Astron. Astrophys. 1993, 280, 617–646. [Google Scholar]
- Blum, J.; Wurm, G.; Poppe, T.; Heim, L.O. Aspects of laboratory dust aggregation with relevance to the formation of planetesimals. Lab. Astrophys. Space Res. 1999, 236, 399–423. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Yu, Y.; Song, Z.; Cheng, B.; Dai, W. Understanding the Early Stage of Planet Formation: Design and Demonstration of the Space Experimental Apparatus. Aerospace 2023, 10, 285. https://doi.org/10.3390/aerospace10030285
Huang C, Yu Y, Song Z, Cheng B, Dai W. Understanding the Early Stage of Planet Formation: Design and Demonstration of the Space Experimental Apparatus. Aerospace. 2023; 10(3):285. https://doi.org/10.3390/aerospace10030285
Chicago/Turabian StyleHuang, Chenyang, Yang Yu, Zhijun Song, Bin Cheng, and Wenyue Dai. 2023. "Understanding the Early Stage of Planet Formation: Design and Demonstration of the Space Experimental Apparatus" Aerospace 10, no. 3: 285. https://doi.org/10.3390/aerospace10030285
APA StyleHuang, C., Yu, Y., Song, Z., Cheng, B., & Dai, W. (2023). Understanding the Early Stage of Planet Formation: Design and Demonstration of the Space Experimental Apparatus. Aerospace, 10(3), 285. https://doi.org/10.3390/aerospace10030285