1. Introduction
Addressing environmental challenges, especially global warming, is more than ever a must for the community [
1]. This matter is becoming an increasing priority at the regional and global level, which was already investigated by Crompton in 2009 [
2]. Europe has made commitments to reduce aviation’s environmental footprint [
3], not only because of growing political pressure, but also due to the widespread social concern about climate change. This is triggering a paradigm shift in the aviation sector, since the sector is contributing to climate change, increasing noise, affecting local air quality and consequently affecting the health and quality of life of European citizens [
4,
5]. In 2020, air traffic movements drastically reduced due to the COVID-19 pandemic [
6]. Currently, at the end of 2022, the number of movements still being below that of pre-pandemic times [
7]. Gudmundsson expects that it will require up to five to ten years to recover to 2019 numbers of air traffic movements [
8]. The dramatic reduction in flights is not only considered as negative. On the contrary, it could be seen as an opportunity to rebuild the system and make the air traffic sector greener than before the pandemic. In this context, Brouder and Ateljevic described the extensive economic reset evoked by COVID-19 but also the possibility for a fresh start [
9,
10]. From a general perspective, the air traffic in Europe was growing until 2019 and is expected to continue increasing significantly in the future again in order to cope with the growing demand for mobility and connectivity [
11]. For example, Dube and Gössling assessed the rapid impact of pandemic control measures on the air transport sectors and the prospects for recovery of the global aviation industry [
11,
12].
The long-term effects on the environment from the aviation sector, mainly caused by aircraft noise and exhaust gases (especially CO
2, nitrogen oxides NO
x and methane), make aviation’s environmental footprint a clear target for mitigation efforts. The future growth of air traffic shall go hand in hand with environmentally sustainability policies. Therefore, studies and research are being conducted especially in Europe, exploring possible optimisation of aircraft technologies and air traffic management (ATM) operations. This is investigated by Bolić and Ravenhill within the Single European Sky ATM Research (SESAR) projects [
13]. One possible starting point is the optimisation of ground movements at the airport. Within the EPISODE 3 project [
14] and the EMMA project [
15,
16], advanced surface movement guidance systems were developed to design airport movements more efficiently. Furthermore, the use, optimisation and practical implementation of 4D trajectories, including a time parameter, was investigated by [
17]. Given the close interdependence between aircraft routing and the resulting impact on the environment, optimisation of flight trajectory design and air traffic control (ATC) operations are appropriate means of reducing emissions in short and medium-term periods. Another target is the analysis of airspace conditions to mitigate delays due to overload. Analysing the air traffic complexity in the approach phase can lead to multi-sector planning operations, which detect overload and reduce delays. The Harmonised ATM Research in Eurocontrol (PHARE) [
18] developed a algorithm to calculate the air traffic complexity.
Within the European funded project GreAT (Greener Air Traffic Operations), this paper investigates a new concept for the approach phase with a slightly extended scheduling horizon from 50 to 125 Nautical miles (NM) [
19]. The main goal is to enable more sustainable approach procedures in terms of fuel-optimised approaches. This is realised by a new coordination system between aircraft flight management systems (FMSs) and arrival manager (AMAN) for guidance of inbound traffic. For that purpose, a new airspace structure and controller system enhancements for arrival and departure management are investigated within this project. In the following sections, all new concept elements are briefly introduced. In addition, the discrepancy between time-based and currently used distance-based planning is examined. These concept elements and the tactical assisting systems are the basis for the final human-in-the-loop (HITL) validation trials. According to EUROCONTROL’s European Operational Concept Validation Methodology (E-OCVM), HITL simulations are appropriate techniques to receive objective and subjective outputs [
20]. These outputs are generated by collecting data from simulator logs, observer notes, questionnaires and debriefings. The described study aims to test the system and concept improvements based on the advanced ATM procedures. Furthermore, the aim is to assess the reduction in fuel consumption by operational parameters and therefore, assess the reduction in greenhouse gas emissions too. Aside from the operational parameters directly linked to environmental sustainability, such as flown distance and number of landed aircraft, the air traffic controllers’ (ATCOs) mental workload, situation awareness and perceived safety are analysed.
The concept of mental workload is described by Eggemeier and O’Donnell in [
21]. An ATCO’s mental workload is related to the requirements of the control tasks performed. As a new airspace design was proposed within the GreAT Project, it is important to assess if the ATCOs can handle the traffic within the new airspace structure while maintaining an acceptable level of mental workload. On the one hand, an unknown simulated operational environment with unfamiliar tools, including the radar display and new functionalities in the controller working position (CWP), may induce an additional workload. The extent of the increase will depend on the complexity and measures required to handle the new functions. On the other hand, an automated process of the 4D-FMS aircraft could also cause mental underload. It is furthermore essential that the ATCOs perceive operations as safe and that they maintain an adequate level of situation awareness. According to Endsley [
22], situation awareness involves (a) the perception of the elements in the environment, (b) the comprehension of the current situation and (c) the projection of the future status.
For a medium–large-scale airport, such as Munich airport (EDDM), it is assumed that fuel-optimised procedures are not feasible due to the current airspace structure, average traffic flows and applied planning horizon. This hypothesis is underlined by two crucial reasons. Firstly, current AMANs are developed with regard to increased capacity and to support ATCOs at scheduling and sequencing of inbound traffic. Thus, the AMAN’s planning process is not optimised towards fuel-efficient trajectories, rather than optimising the capacity. Enabling greener approaches at medium to large sized airports with less CO
2 emissions, such as long-distance independent approaches, depends upon a redesign of the airspace structure and extension of the capacity-centred AMAN calculation. Since these independent long-distance approach procedures start at the top of decent and end on the final decent, aircraft’s speed profiles are unknown for ATCOs, which requires more space for coordination with standard approaches [
23]. Therefore, a completely new terminal manoeuvring area (TMA), a so-called the extended-TMA (E-TMA), was designed for the independent parallel runway system of EDDM. Additionally, a trajectory negotiation process between the aircraft’s FMS and the in-house developed AMAN was established to enable long-distance independent approach procedures. Lastly, tactical supporting tools have been developed and provided for ATCOs to enable a time-based aircraft guidance system instead of the conventional distance-based guidance system, since the guidance of fuel-optimised approach routes follows the time principle in order to meet the negotiated target times, although occasionally, aircraft deviate from their optimum profiles. In the following, each concept will be introduced one after another.
2. Materials and Methods
2.1. Extended Terminal Manoeuvring Area
The redesign of the EDDM TMA consists of four steps, which is simplified in
Figure 1. First of all, the EDDM TMA was extended from a range of 50 to 125 NM. Secondly, when crossing the border from an outside sector of the E-TMA, all aircraft were distributed on direct routes leading towards the runway system. Thirdly, aircraft were distinguished by their technical functionality in their onboard FMSs. Thus, approaching traffic was sorted into two categories.
Aircraft equipped with common FMSs, autopilots and no or only simple data links, such as Controller Pilot Data Link Communications (CPDLCs), were categorised. In this concept, these were referred to as 3D-FMS aircraft or non-equipped aircraft. They were able to perform a flight along a calculated trajectory but did not have the ability to meet a target time with less than twenty seconds of reliability, since they cannot sufficiently compensate changing wind conditions with an influence on their own airspeed. Additionally, the limited bandwidth of the data link did not allow a target time negotiation between the FMS and AMAN.
The second category had by aircraft equipped with an advanced FMS or 4D-FMS and a broadband data link. These were referred to as 4D-FMS aircraft and had the ability to perform a long-distance independent approach on a defined route with negotiated target times. With a 4D-FMS, aircraft had the capability to fly along a predefined 4D-trajectory and meet the target times at all points of the way with divergence of less than plus or minus six seconds. Deviations in route, altitude and speed due to changing wind conditions were automatically compensated by the 4D-FMS, even if this may mean a divergence from the optimal approach profile.
In the fourth step to adapt the E-TMA, aircraft separation points (ASP) were introduced. Those ASPs were located around the airport with a distance of around 20 NM to the runways and had nearly the same functionality, such as TMA entry fixes today. The difference from traditional entry fixes is that at this point, the aircraft with differing FMS equipage are split. 4D-FMS aircraft followed a direct route to the direct-only merge points (DOMP), located on the right and left sides of the final approaches. This DOMPs had the task to serve as stream collection points only for the 4D-FMS aircraft from one compass direction. 3D-FMS aircraft were guided conventionally from the ASPs—the downwind transition by the ATCOs.
To separate the inbound streams of 4D-FMS and 3D-FMS aircraft in the area between ASPs and final approaches, the downwind intercept altitude was 8000 ft. In this way, the direct approaches overtook the standard approaches at the possible crossing points. If there was more than one aircraft heading to the same ASP, the wake vortex separation was established with the traffic distribution to nearby ASPs before entering the TMA. If too many aircraft arrived at one ASP at the same time, additional speed and level clearances were advised. In the event of conflicts at the ASPs, the first arrival received its optimal trajectory. If additional aircraft arrived at the ASPs at the same time and could not be guided without conflict due to their optimal target time window, they were automatically treated as conventional aircraft and manually guided over the conventional routes.
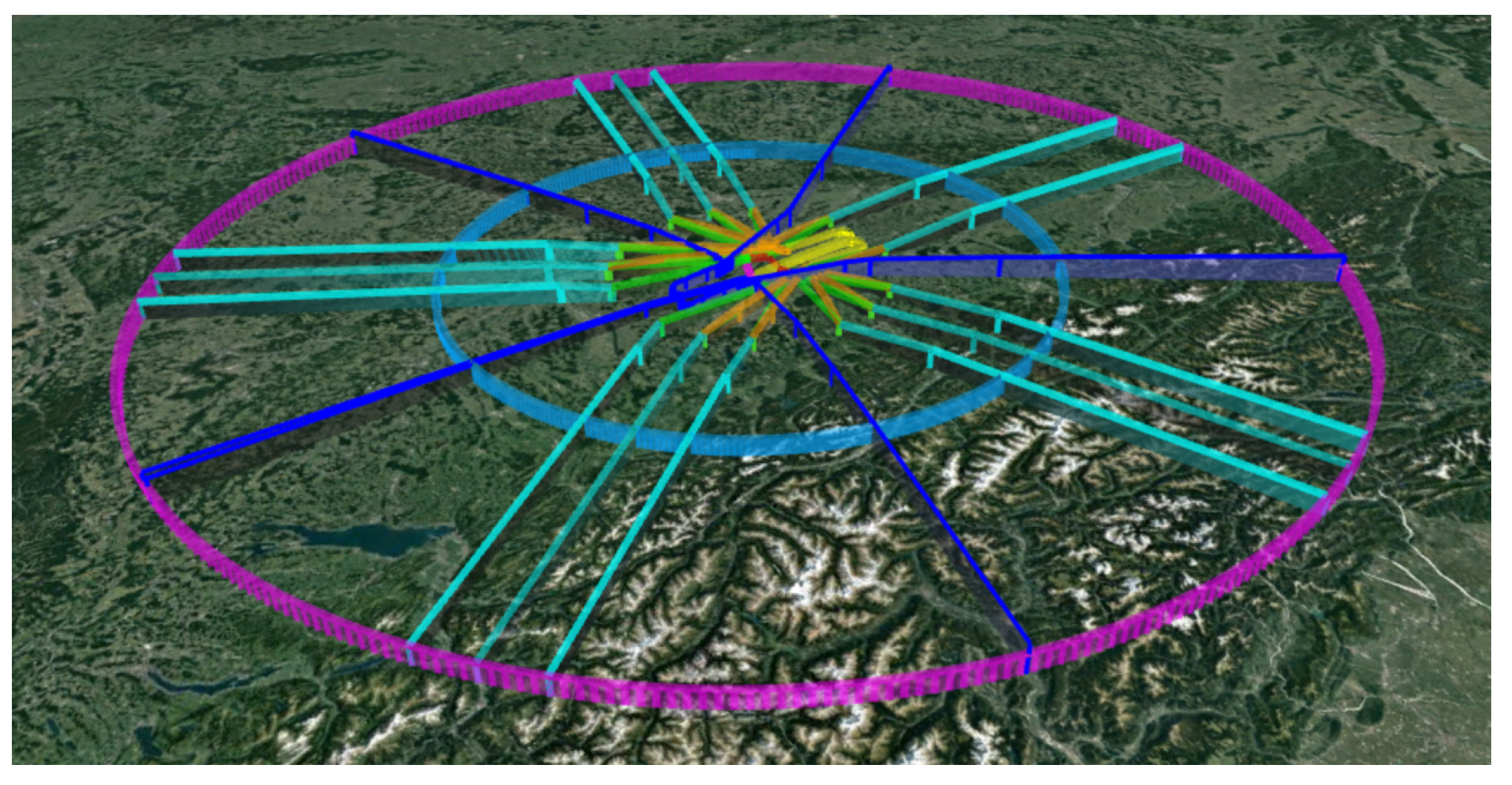
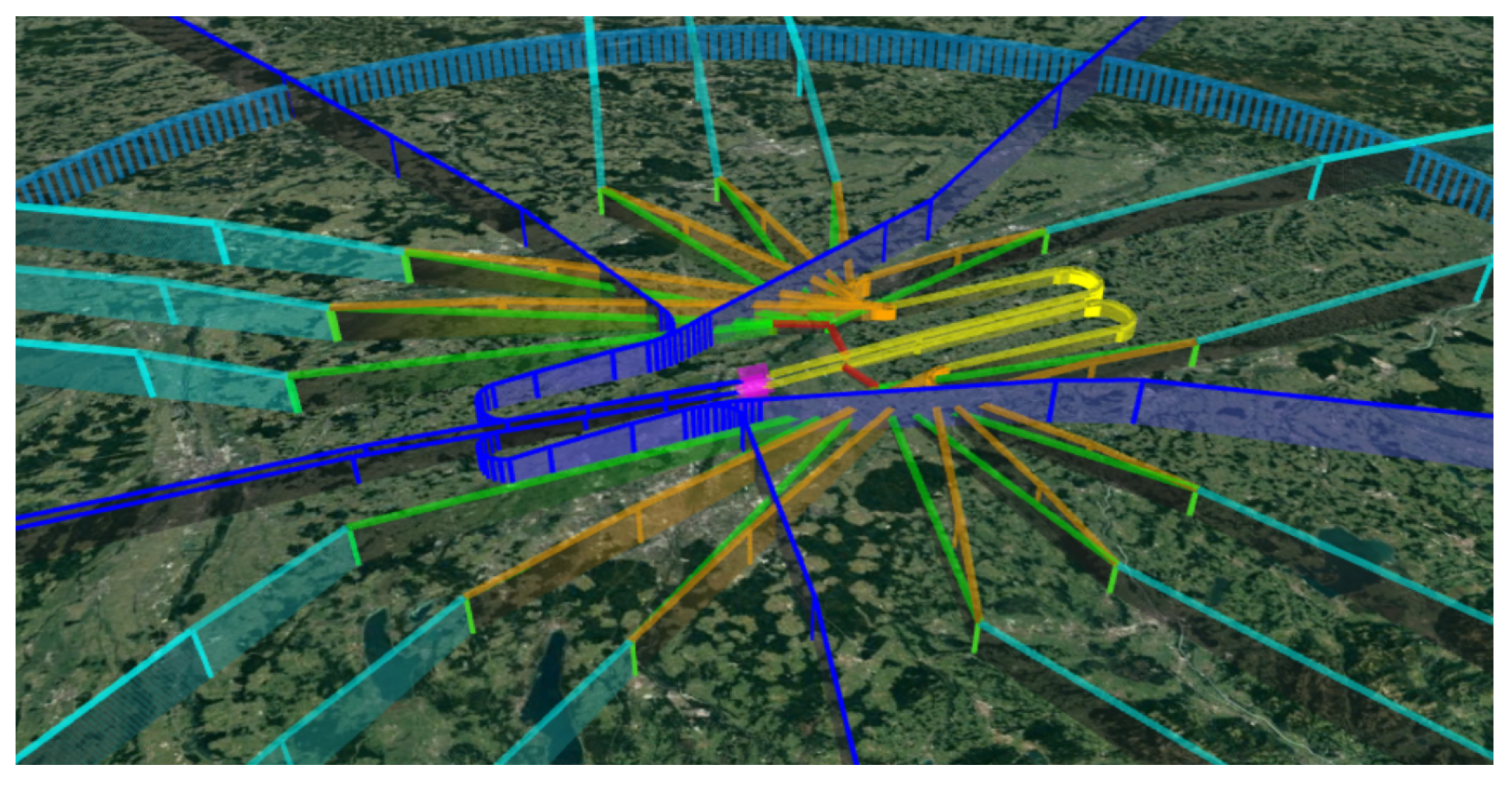
Figure 2 and
Figure 3 illustrate the designed model in three dimensions. The cyan routes correspond to the direct routes towards the airport, purple marks the E-TMA boundaries, direct approaches for 4D-FMS aircraft are displayed in green and the conventional routes for 3D-FMS aircraft are in orange. All remaining blue routes depict designed departure routes.
2.2. Tactical Assistance Systems
To support approach ATCOs sequencing the inbound traffic in the GreAT airspace structure around an airport, three systems were developed or refined as tactical support systems. In order to obtain an early picture of the target times of 4D-FMS approaches relative to 3D-FMS approaches, the label projection technique “ghosting” was used and extended for continuous decent approaches (CDA).
Ghosting is the method of projecting an aircraft’s label on a radar display on a different route in order to make it easier for the ATCOs to merge two routes at one waypoint [
24]. The ghost position is located where, based on current performance, the aircraft would be if flying that route. The visualisation of the arrival slots planned by the AMAN was carried out on the centreline and the final approach with the help of
TargetWindows. Finally, a precise numerical check of the planned and observed separations was made possible by the
Centerline Separations Visualisation Tool.
2.2.1. Time-Based Ghosting
Separation between ghost and real aircraft on different routes then showed the actual relative temporal spacing between those objects, as if both aircraft were on the same route [
25]. This was originally done for two arrival streams on converging runways simulating a dependent parallel approach [
26]. Two different methods can be used to calculate ghost-label positions: Time-based and distance-based ghosting. Distance-based ghosting can be used without problems for regular arrival routes, where two approach streams are merged on which the aircraft move with the same standardised approach procedure and speed [
27]. The merging of approach streams with different approach procedures and speeds poses new challenges. These can be partially solved if a time-based “segmented ghosting” with dynamic approach speeds is used for the ghost-label’s position calculation [
28].
One of the tasks of approach ATCOs in the GreAT study was the merging of manually guided and CDA-performing aircraft with different speed profiles at the late merging point (LMP) onto the jointly used last six nautical miles of the final approach. A particular challenge for ATCOs was that they did not know the speed profiles of the 4D-FMS aircraft. Due to this reason, a time-based form of ghosting was developed, since here, aircraft with significantly different speed profiles had to be merged and therefore projected onto one route [
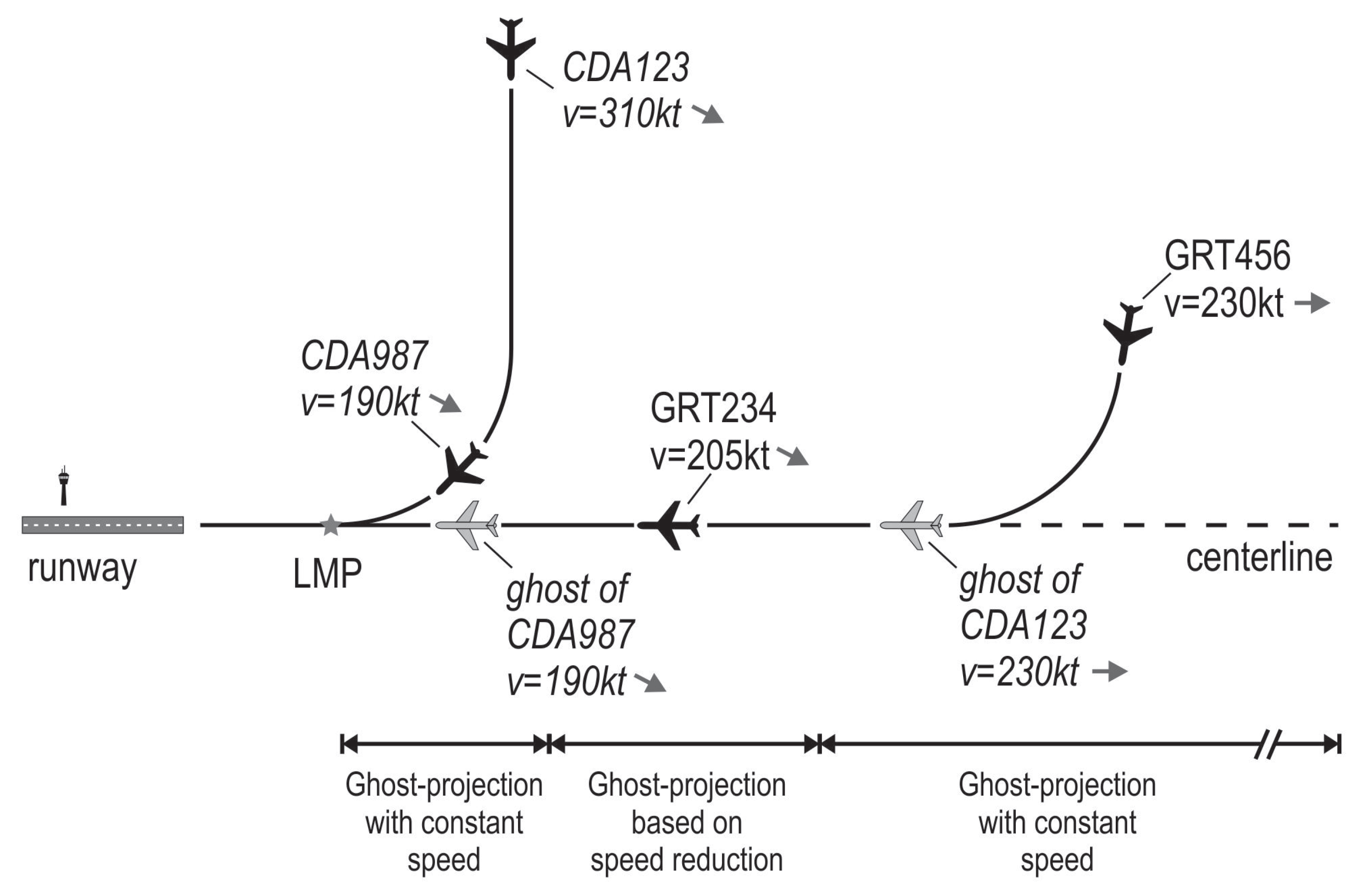
29]. In time-based segmented ghosting, the current ghost-label position is calculated using the negotiated target time of the original aircraft at the late merging point (LMP) and calculating from this point in time back to the actual time to locate the position an aircraft would have if moving with a standard speed profile already on the final approach. The LMP represents the location where the 4D-FMS aircraft and ghost meet on the final approach. For the movement of the ghost on the final approach, a rudimentary flight simulator was implemented in the AMAN, which calculated the aircraft movements along the typical speed profile of a standard approach on the final approach and moved the ghost accordingly (see in
Figure 4). Thereby, the phases of speed reduction and constant speeds were tuned for each aircraft so that ghost and real aircraft finally met at the LMP at the negotiated target time. If an aircraft deviates from its negotiated target time, it will also not meet its ghost at the LMP. However, since it will also cause a conflict on the final approach in the event of a deviation, it must then be downgraded to a standard approach and guided conventionally via the downwind and base leg to the final approach. In this case, it loses all the advantages of the direct approach. However, during the validation, we assumed that modern 4D-FMS can accurately maintain a fixed target time for a waypoint with only a few seconds of deviation even under unfavourable wind conditions. During pre-validations, it was shown that it is sufficient for ATCOs, regarding safety aspects, if the ghost label is faded out thirty seconds before reaching the LMP, instead of showing the ghost until aircraft meet at the LMP.
In this way, the approach ATCO was able to implement the distances between manually guided 3D-FMS aircraft and the 4D-FMS aircraft (callsign CDA123, CDA987) on the final approach, while being sure that they can be maintained all the way to the LMP.
2.2.2. TargetWindow
Another optical supporting function used for guidance assistance in operational environments for 3D-FMS aircraft is an indicator in the form of a target circle or arrow on the centreline and final approach. This target circle visualises a position for the merging of two arrival streams. These systems also do consider several turns of an aircraft [
30,
31]. Another approach is using “slot marker” circles to show the aircraft’s expected position along its trajectory if it were conforming to the schedule [
32]. Similar target position indicators may also be used for certain waypoints in upper airspace, for wake vortices [
33] or in lower airspace for aircraft on several arrival routes, which are mapped onto one centreline [
28,
34]. For the introduction of the European wake turbulence categories and separation minima on approach and departure (RECAT-EU) I, a new categorisation of the mandatory wake vortex separates them into six. While today most countries use four categories, EUROCONTROL implemented the Leading Optimised Runway Delivery (LORD) display aid for approach ATCOs [
35,
36]. With two additional triangular symbols for each inbound aircraft moving on the final approach, it follows the principle of DLR’s TargetWindow without indicating an additional safe area around the optimal position on the final approach.
A TargetWindow on the ATCOs traffic situation display was a marked interval on the centreline where it was safe for individually guided aircraft to be fed into the planned or established arrival stream by the ATCO [
37]. Target positions in this window indicated the optimal positions after a turn-to-base manoeuvre to meet the AMAN’s calculated trajectory and touchdown time. When aircraft were flying on downwind, they received a turn-to-base command to perform the base and final leg by the feeder ATCO [
38]. It did not matter whether an aircraft was turned in from downwind or guided to the final approach by a direct or a fan approach. The decisive factor was that the aircraft manoeuvres were precisely presented within the TargetWindow when reaching the its last phase of approach.
On the one hand, the task of approach ATCOs was to clear the turn not too early to avoid wake vortex separation violations on final approach. On the other hand, the clearance had to be given early enough, so that the aircraft was not too far behind its predecessor, thereby reducing the capacity and effectiveness of the airport after the turn manoeuvre. A special challenge in this context was the wind, as its influence on the airspeed can change extremely during the 180-turn from downwind on the final approach.
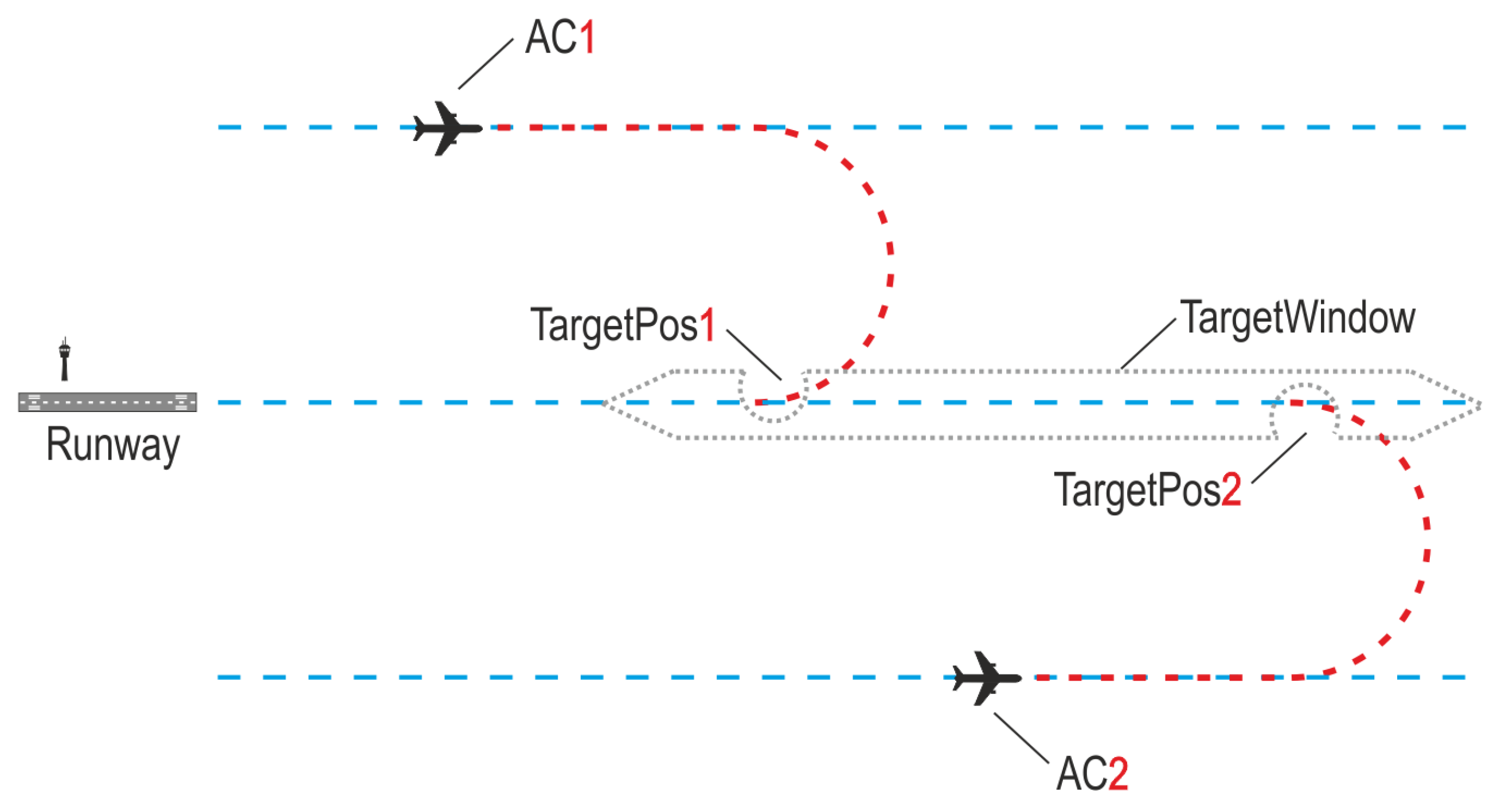
In the TargetWindows concept, target positions for turning aircraft were indicated by a dotted semicircle on the final approach with the open side facing the for this position by the AMAN scheduled aircraft (
Figure 5). The surrounding dotted lined TargetWindow symbolises a safe area around this optimal target position even if the aircraft does not hit its planned position exactly. Furthermore, there is a buffer of half a nautical mile, shown by a tapering of the TargetWindow at both ends. This helps ensuring that ATCOs do not violate separation minima from predecessors and successors.
With the passage of the time, the TargetWindows moved with the speed of the expected aircraft in the direction of the runway. In this way, the ATCO was shown the current sequence planning and also planned distances of aircraft from each other. From this point of view, the TargetWindow also represented a “ghost”, since it projects the position of the corresponding aircraft from another route onto the centreline depending on the distance still to be flown until touchdown, at least as long as the aircraft was moving along its planned trajectory. Unlike a ghost, however, a TargetWindow did not change its movement on the final approach because it represented the ideal position when the corresponding aircraft had to be turned on base and final approach. The ATCOs therefore did use the TargetWindow as an indicator of whether the aircraft was too early or too late at the LMP, and thus at the threshold. Nevertheless, the ATCO retained both the responsibility for the approach guidance and all freedom to follow the AMAN’s suggestions or to establish his own sequence. The TargetWindow reacted just as adaptable to traffic changes as the entire AMAN.
2.2.3. Centreline Separation Visualisation Tool
Within the trails, an essential task of an approach ATCO was to set and monitor the separation between aircraft on centreline and final approach. In addition, distance markers (scale) were available on modern primary displays, which allowed a quite fast and reliable estimation of the distances between approaching with subdivision in a nautical mile. For a much more finely graduated distance display, the final approach distance indicator centreline Separation Visualisation Tool (CSVT) was developed (
Figure 6). Located in separate windows for each centreline, the aircraft which were currently on final approach approach were represented by defined symbols with callsigns. In addition, the current distances between the aircraft were displayed in NM. In this way, the alphanumeric display enabled the ATCO not only to monitor the current distances, but also to immediately detect any changes in their tendency and to intervene with guidance in the event of imminent separation violations.
In addition to actual aircraft, labels for ghosts (squares) and TargetWindows’ positions (semicircles) were also displayed, allowing approach ATCOs to estimate how large the separation would be after turning over Base or LMP and before reaching the final approach. Different colours for the weight classes of aircraft allowed more precise differentiation.
2.3. Validation Trials and Setup
The validation was conducted in the form of real-time HITL simulations and focused on the coordination and guidance of arrival streams (especially the 3D-FMS aircraft) within the novel E-TMA concept and supporting tools. The ATCO worked as a director (feeder). All necessary actions normally done by the executive (pick-up) role were fulfilled by the simulation pilots independently. This included, for example, early decent clearances for the 3D-FMS aircraft. Thereby, the 4D-FMS aircraft were untouchable as soon as the negotiation process was completed. This means that the ATCOs were not actively participating in the negotiation process and not directing these aircraft through their assigned flight paths. During the trials, the ATCO was in charge of both independent parallel runways at EDDM. A within-subjects design with the factor “share of 4D-FMS equipped aircraft” was used to examine the dependent variables flown distance, number of landed aircraft, mental workload, perceived safety and situation awareness [
39]. Additionally, feedback about the improved assistant tools was received. By evaluating the dependent variables, the targeted environmental impact was recorded.
The trials were structured into two HITL simulations campaigns. This paper focuses on the results of the final second campaign. The first HITL simulation campaign took place in May 2022. The outcome of this campaign provided minor adjustments and improvements for the simulation setup and procedures which were implemented in the second campaign. The second HITL simulation campaign took place in September 2022. Five male ATCOs participated in the second campaign, with an age ranging between 28 and 44 years (M = 36.8, SD = 8.12) and with 2 to 18 years (M = 10, SD = 7.18) of work experience. One of the five ATCOs had used similar supporting tools or concepts before the simulation in the first HITL simulation campaign in May. Nevertheless, the participant’s data were included in the final analysis, as no large training effects were expected. Due to the limited sample size, N = 5, the data and results were analysed on a non-parametric level, providing only first indicators.
2.4. Simulation Environment
As simulation environment for the HITL simulation campaigns, the Air Traffic Management and Operations Simulator (ATMOS) [
40] of the DLR, Braunschweig Air Traffic Validation Center was selected. The software NARSIM (NLR’s Air traffic Management Real-time Simulator) version 8.1 was deployed as generic real-time simulation software [
41]. Furthermore, the aircraft’s performance was modelled based on the BADA (Base of aircraft data) model version 3.15 by EUROCONTROL [
42]. For the HITL simulations, one CWP and three simulation pilot positions were configured. All four working positions were connected via a simulated radio connection (Voice over IP). Simulation pilots were responsible for implementing the aircraft clearances communicated by ATCO via radio connection. Within this study, one simulation pilot controlled up to four aircraft, depending on the traffic situation and flow. A simulation pilot was provided with a slightly different display compared to the ATCO, consisting of the following elements.
- (a)
Stripview: Listing all flights radioing on simulation pilots’ frequency.
- (b)
Workspace: Displaying flight strips of flights under control of the simulation pilot. Flight strips included aircraft’s performance data, such indicated airspeed, heading, flight level or altitude if the aircraft is below the transition level, arrival route and further more.
- (c)
Radar screen: Providing an overview of the actual traffic picture within the airspace.
2.5. Simulation Setup and Scenarios
The simulation was implemented for EDDM airport with its two parallel runway systems. Both runways have an offset of 1500 m and a length of 4000 m. The distance between the runways is 2300 m, sufficient for independent usage of both runways. During the simulation, runways 26R and 26L were in use. The ATCO was in charge of both independent parallel runways guiding the arrivals streams. Departure was integrated into the simulation but handled by the simulator automatically via a departure manager (DMAN). No limitations regarding the aircraft type or weather restrictions were simulated.
In total, seven different scenarios were developed.
Table 1 displays an overview of the seven developed scenarios and their composition. In the following, all scenarios are briefly explained. For the human performance, no baseline was simulated during the simulation campaign. Therefore, the results were compared to the reference scenarios (R1 and R2). The reference scenarios, R1 and R2, serving as the baseline for the objective data, were considered important to ensure comparability for the simulation data. The scenarios were based on real air traffic. Data for the reference scenarios where taken from the OpenSky scientific dataset [
43]. These data are not validated and may contain inaccuracies. The data for R1 and R2 were composed by ten operating hours selected from October to December, 2021, consisting of 38–40 (R1) and 18–22 (R2) landings per hour from OpenSky datasets. R2, which provides a smaller number of aircraft, was taken into the analyses too, to see the comparison of simulation results for an even smaller number of arrivals. This was done under the presumption that a greater number of arrivals per hour makes it more difficult to enable direct routes due to safety issues. Hence, more aircraft have to fly conventional routes, which leads to a greater value of distance flown per aircraft.
The simulation scenarios were based on a medium traffic load at EDDM, which equals two thirds of the maximum traffic at EDDM [
44]. The number of departures was reduced. The traffic mix by aircraft type was based on typical EDDM traffic conditions in 2022 [
45]. Since currently the share of aircraft with advanced FMS varies widely among airlines, the amount of 4D-FMS aircraft included in the scenario was used as decisive parameter to distinguish the scenarios. Thus, the four simulation scenarios were developed with different amounts of 4D-FMS aircraft, starting with 20% for a training scenario and increasing up to 80%. Respectively, in the present paper, the scenarios are referred as R1, R2, T, S30 scenario, S60 scenario and S80 scenario; see
Table 1. For the simulation scenarios, only the information from flightradar24 on the real callsigns, aircraft types and departure airports was used [
46]. The percentage of heavy aircraft varied between 3 and 19%. Each scenario lasted for 45 min. Aircraft were initialised outside the E-TMA area and flew predefined arrival routes towards the boundaries of the E-TMA.
Table 1.
Reference and simulation scenarios: composition and overview (ARR: arrivals).
Table 1.
Reference and simulation scenarios: composition and overview (ARR: arrivals).
| Scenario ID | ARR per Hour | % of 4D ARR | Traffic Sample | % of ARR Heavy | Time Interval 3 |
|---|
| R1 1 | 38–40 | 0 | 2021 | 0 | - |
| R2 1 | 18–22 | 0 | 2021 | 0 | - |
| T 2 | 20 | 25 | 2019 | 13 | 14:00–14:45 |
| S30 2 | 40 | 30 | 02.04.2022 | 23 | 07:00–08:00 |
| S60 2 | 40 | 60 | 03.03.2022 | 19 | 09:00–10:00 |
| S80 2 | 40 | 80 | 01.04.2022 | 3 | 18:00–19:00 |
Each ATCO participated in a full day of simulations. Each day was scheduled into five sections, starting with a briefing and training session (T) to familiarise the ATCOs with the simulation environment. Thereafter, the simulation scenarios S60, S30 and S80 were run. After each session, the ATCOs were asked to fill in the post-run questionnaire (PRQ). Finally, a second run with the S60 scenario was conducted. This run acted as an explorative simulation run with the ATCO to obtain more in-depth feedback about the system from the ATCOs. During the explorative simulation run, individual components (Ghosts, TargetWindows and CSVT) were deactivated and activated one at a time. Participants received some time to test the system when one of the components was deactivated and were asked how this affected their work as an open question. This was followed by detailed questions about each tool. The debriefing took place after the non-explorative simulation runs and was combined with the explorative simulation run. The debriefing questions were modified from the first to the second HITL campaign, based on ATCOs feedback. Finally after a full day of simulation exercises, ATCOs were prompted to fill in a post exercises questionnaire (PEQ). As the order of simulation runs was kept constant for all participants, training effects or effects of exhaustion cannot be entirely ruled out.
2.6. Validation Methods and Techniques
During the simulations runs, all aircraft data were recorded. This included aircraft performance data, such as velocity, three-dimensional position and actual thrust value. Aircraft performance data were logged. The resulting log files were used for post-analysis to examine the concept’s impact on the defined dependent variables flight distance and number of landed aircraft.
The dependent variables mental workload, perceived safety and situation awareness were assessed on the basis of questionnaires and debriefing sessions. Two different sets of questionnaires were administered. The PRQ was used after each simulation run. The PRQ includes the NASA Task Load Index (NASA-TLX) [
47,
48] and the situation awareness part of the Solutions for Human Automation Partnerships in European ATM (SHAPE) (SASHA) questionnaire, which was developed to assess the effects of system automation and trust on ATCOs’ situation awareness [
49,
50].
NASA-TLX was used to assess the different dimensions of workload [
47]. The NASA-TLX includes the subscales mental demand, physical demand, temporal demand, performance, effort and frustration. The subscale physical demand was omitted in the present trials, as no physical demand was expected for the task. Participants were instructed to place a score on slider bars with 21 gradations each, ranging from 0 (low) to 100 (high) (or 0 (good) to 100 (poor) in the case of performance) in steps of 5. Raw TLX ratings were used; i.e., the sub-scales were not weighted. According to Hart [
47], this is a common practice and does not reduce sensitivity. A global raw TLX score was computed by calculating the mean of the five subscale ratings.
In order to assess ATCOs’ experienced situation awareness, the SASHA questionnaire [
50] was administered. SASHA consists of six items on a 7-point Likert-scale from 0 (never) to 6 (always) [
51]. By inverting the ratings of items 2, 3, 5 and 6 and then calculating the mean of all item ratings, the overall SASHA score was computed [
50]. A higher score represented higher situation awareness and was thus preferable.
The post exercise questionnaire (PEQ) was administered after the ATCOs completed the full simulation day. The PEQ included a bespoke questionnaire. Only selected statements about situation awareness and perceived safety are reported in this paper. Statements were rated on a 5-point Likert-scale from 1 (strongly disagree) to 5 (strongly agree). Means and standard deviations were calculated for the bespoke statements, where mean rating of 3 was used as the success criterion.
In addition to the introduced ATCO radar and supporting tools, the Instantaneous Self Assessment (ISA) measure was integrated into the CWP on a second touchscreen to obtain subjective mental workload ratings [
52,
53,
54]. The ATCO was prompted to rate their perceived mental workload on a five-point rating scale (1 = under-utilised, 5 = excessively busy) every five minutes [
55]. The data were used afterwards to evaluate the ATCOs perceived mental workload in different traffic situations.
3. Results
The aim of the simulation trials was to evaluate whether the GreAT concept, adapted within EDDM terminal airspace, could lead to a reduction in both fuel consumption and greenhouse gas emissions by assessing operational parameters compared to the concept currently applied.
3.1. Traffic and Trajectory Analysis
In the first step of the evaluation, an analysis of the traffic data was carried out in order to determine appropriate research horizon and measure the lengths of the travelled trajectories.
Figure 7,
Figure 8 and
Figure 9 present in detail the results of the validation trials and effects described above.
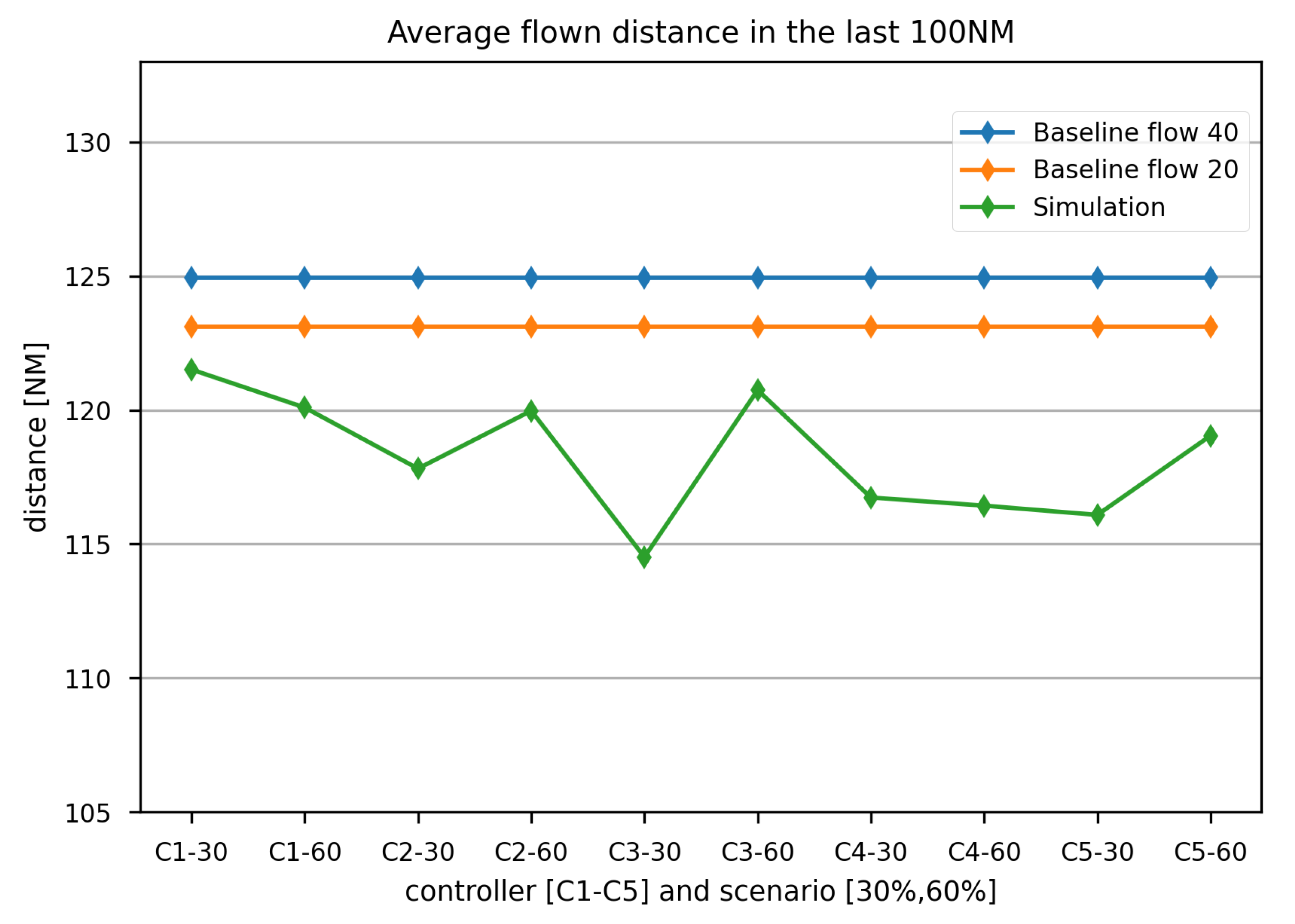
In
Figure 7, the vertical axis presents the average distance flown within the radius of 100 NM from the EDDM reference point for arriving aircraft. The horizontal axis presents the results of validation trials executed by the five ATCOs (C1–C5) testing the two traffic scenarios, differing with distribution of 3D-FMS and 4D-FMS flights, where 30 and 60 correspond, respectively, to the S30 scenario and the S60 scenario. The results obtained during the simulation have been marked as a green line. They can be directly compared with real traffic data for a flow of 40 aircraft per hour (marked in blue—R1) and for a flow of 20 aircraft per hour (marked in orange—R2). These reference flown distances were calculated as averages based on 10 h of arrival traffic at EDDM extracted from the OpenSky database for both.
Treating that as a reference, it can be observed that even with a smaller number of total arrivals in R1 and R2, the introduction of innovative airspace structure, new FMS procedures and ATCOs supporting systems resulted in a reduction in flight distance for all ATCOs and all scenarios. In each case, the simulation results were lower than all reference values.
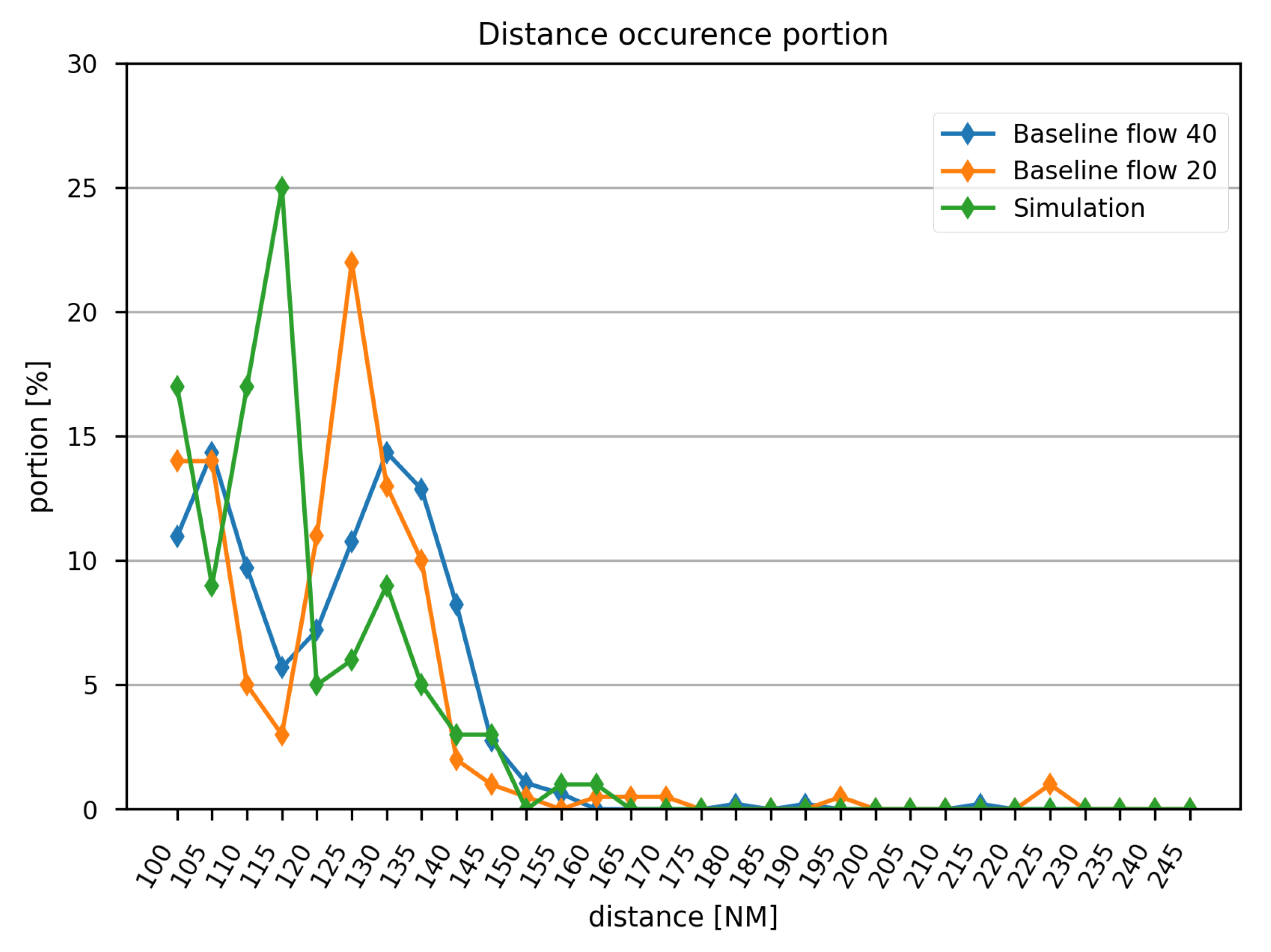
Figure 8 presents the distances flown by aircraft as cumulative occurrence curve divided into 5 NM lengths, where again the green line refers to the simulation results, and the blue and orange lines present the data of the reference scenarios. Within the simulation scenarios, the numbers of flights covering shorter distances were slightly higher than those in the reference scenarios. This was particularly evidenced by the first two peaks observed in
Figure 8, which are substantially higher, representing well over half of scheduled flights (sum of 68.3%) that arrived at the airport in the range of 100–115 NM, in contrast to 36.9% (orange) in one reference. In addition to that, the real traffic data show that a significant amount of flights (corresponding to 25% of occurrences) needed a distance of 125 NM to reach the airport.
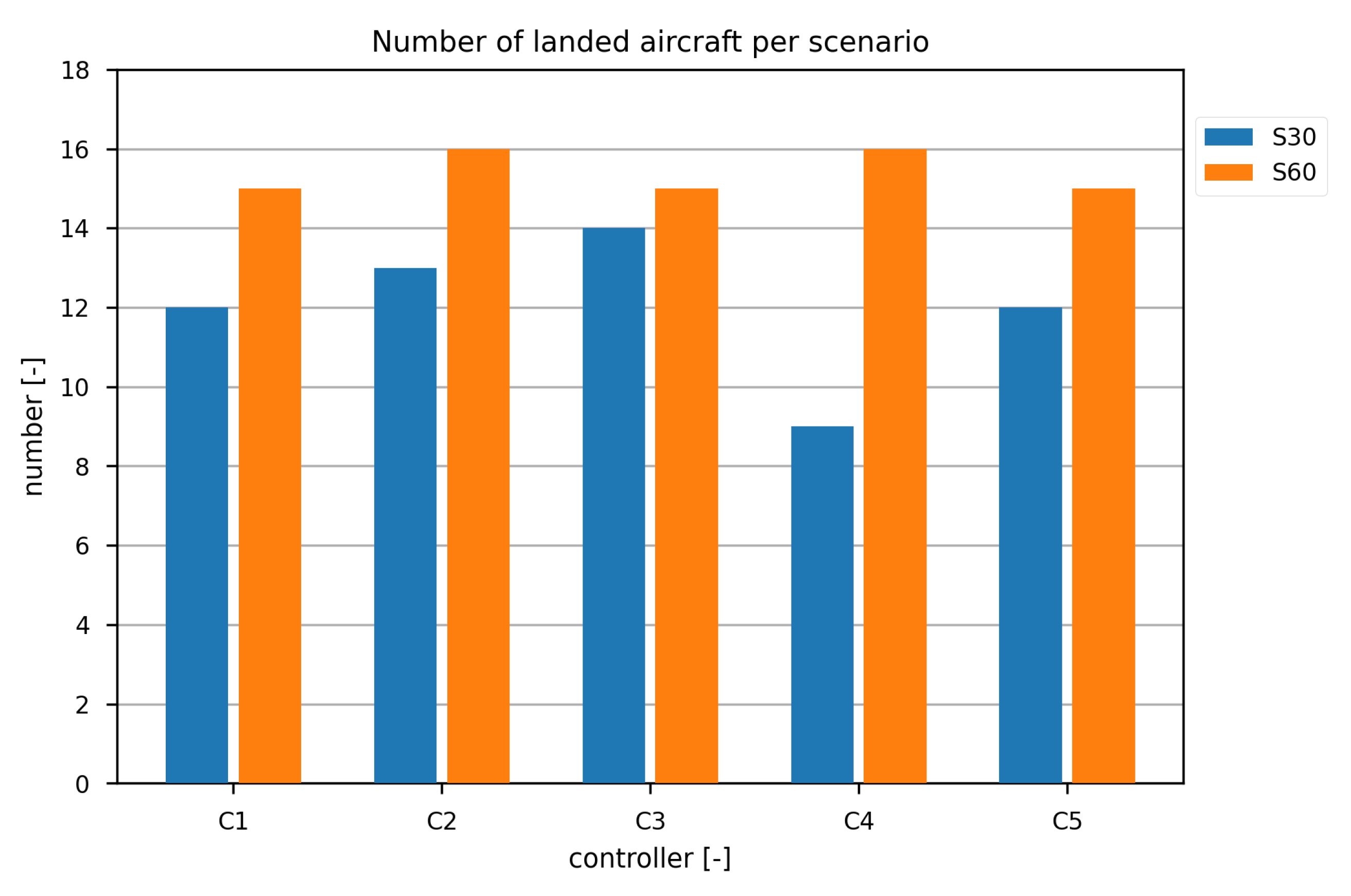
The last set of results is related to the number of approach operations performed. This situation is reflected in the results presented in
Figure 9. The figure displays a comparison between number of approaches executed in two simulation scenarios, where different distributions of 3D-FMS and 4D-FMS operations are analysed. The blue bars represent the numbers for the S30 scenario, and the orange bars correspond to the S60 scenario. The bars display that for each ATCO, a greater number of landed aircraft was recorded during the S60 scenario in comparison to the S30 scenario.
3.2. Mental Workload
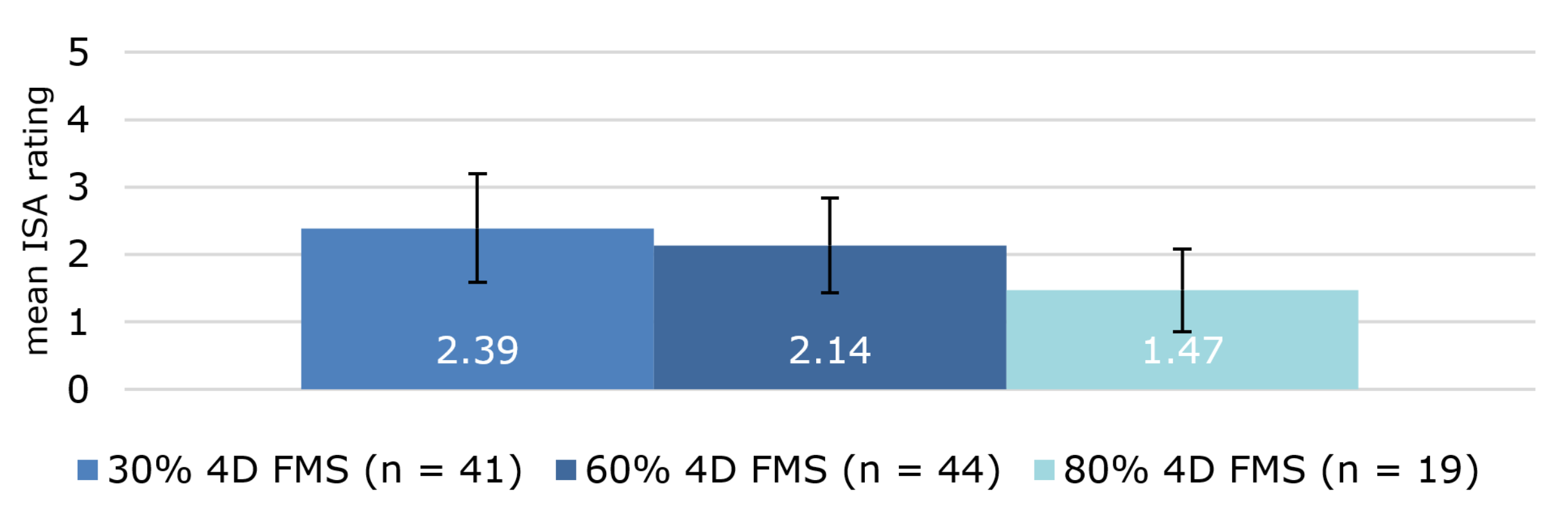
Alongside the capacity analysis, the mental workload analysis was conducted. Therefore,
Figure 10 shows the mean ISA ratings depending on the share of 4D-FMS equipped aircraft (30% vs. 60% vs. 80%). The results were averaged for all participants and assessment times.
Mean ISA ratings were the highest in the S30 scenario, followed by the S60 scenario and then the S80 scenario. For the S30 and S60 scenarios, respectively, ISA ratings fell between 2 (relaxed) and 3 (comfortable), indicating a slightly lower than mid-level mental workload. For the S80 scenario, mean ISA ratings were below 2 (relaxed), pointing towards mental underloading. It is worth noting that the S80 scenario was slightly shorter than the others runs, hence the lower sample size.
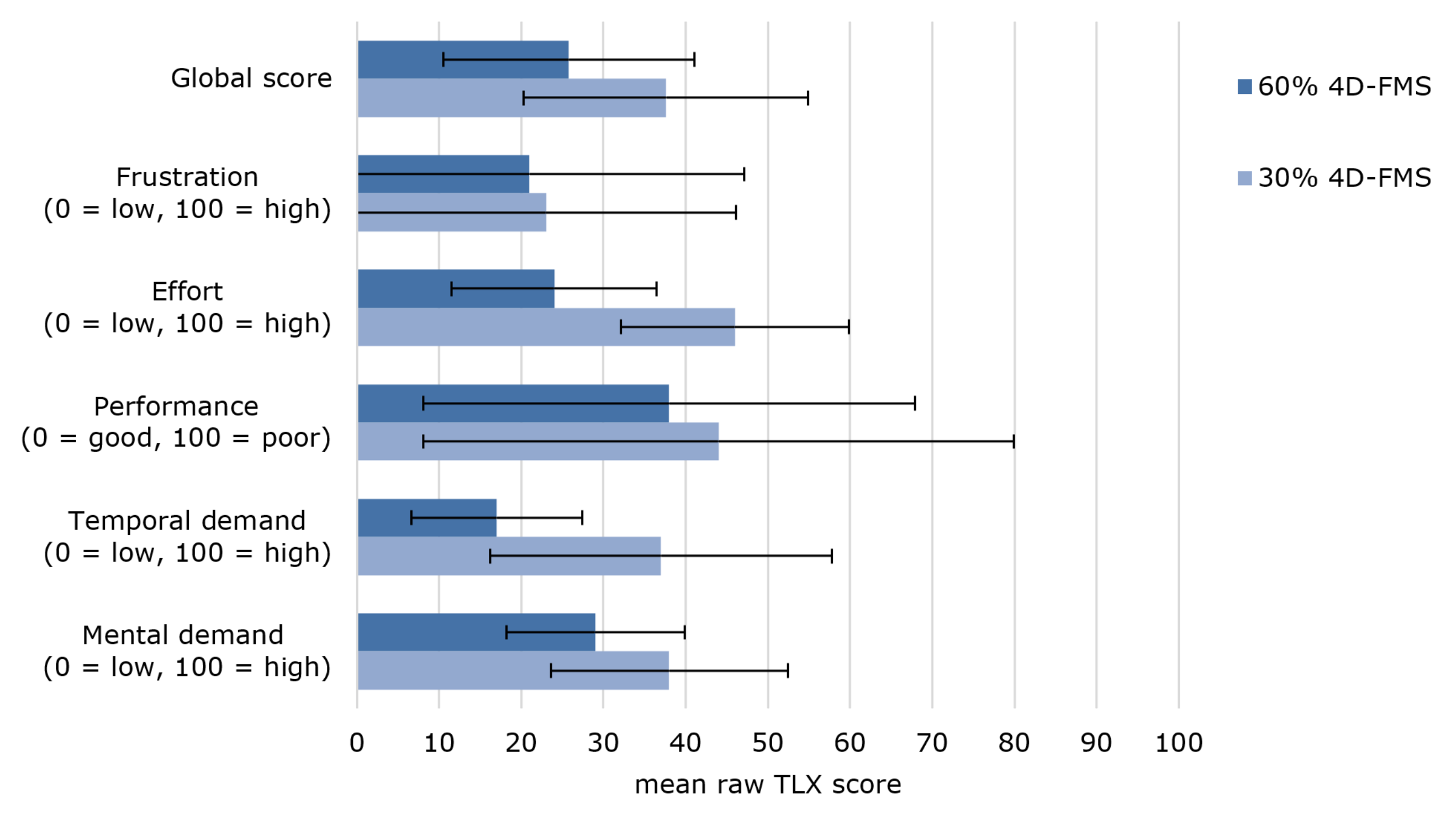
Moreover, the results from NASA-TLX were assessed.
Figure 11 shows the mean raw NASA-TLX scores for scenarios S30 and S60. The mean global score and all mean sub-scores were higher in the S30 scenario than in the S60 scenario, indicating higher overall workload in the S30 scenario than in the S60 scenario on a descriptive level. This is in line with the ISA ratings. Standard deviations were especially high for the sub-scales frustration and performance.
3.3. Situation Awareness
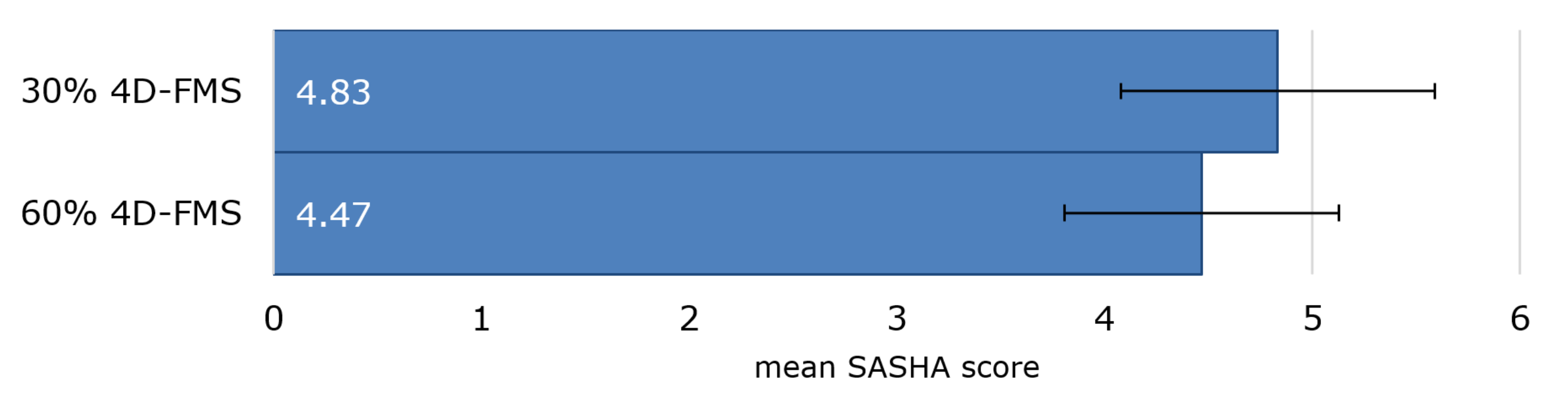
Figure 12 depicts the mean SASHA score for the S30 scenario and the S60 scenario. For both conditions, the mean SASHA score was above 4. On a descriptive level, the SASHA scores for the S30 scenario and the S60 scenario differed only slightly. The SASHA score for the S30 scenario was higher than that for the S60 scenario. Participants’ mean agreement with the statement “I always had a good mental picture of the situation” was M = 4.00 (SD = 0.71), indicating overall agreement with the statement.
3.4. Safety
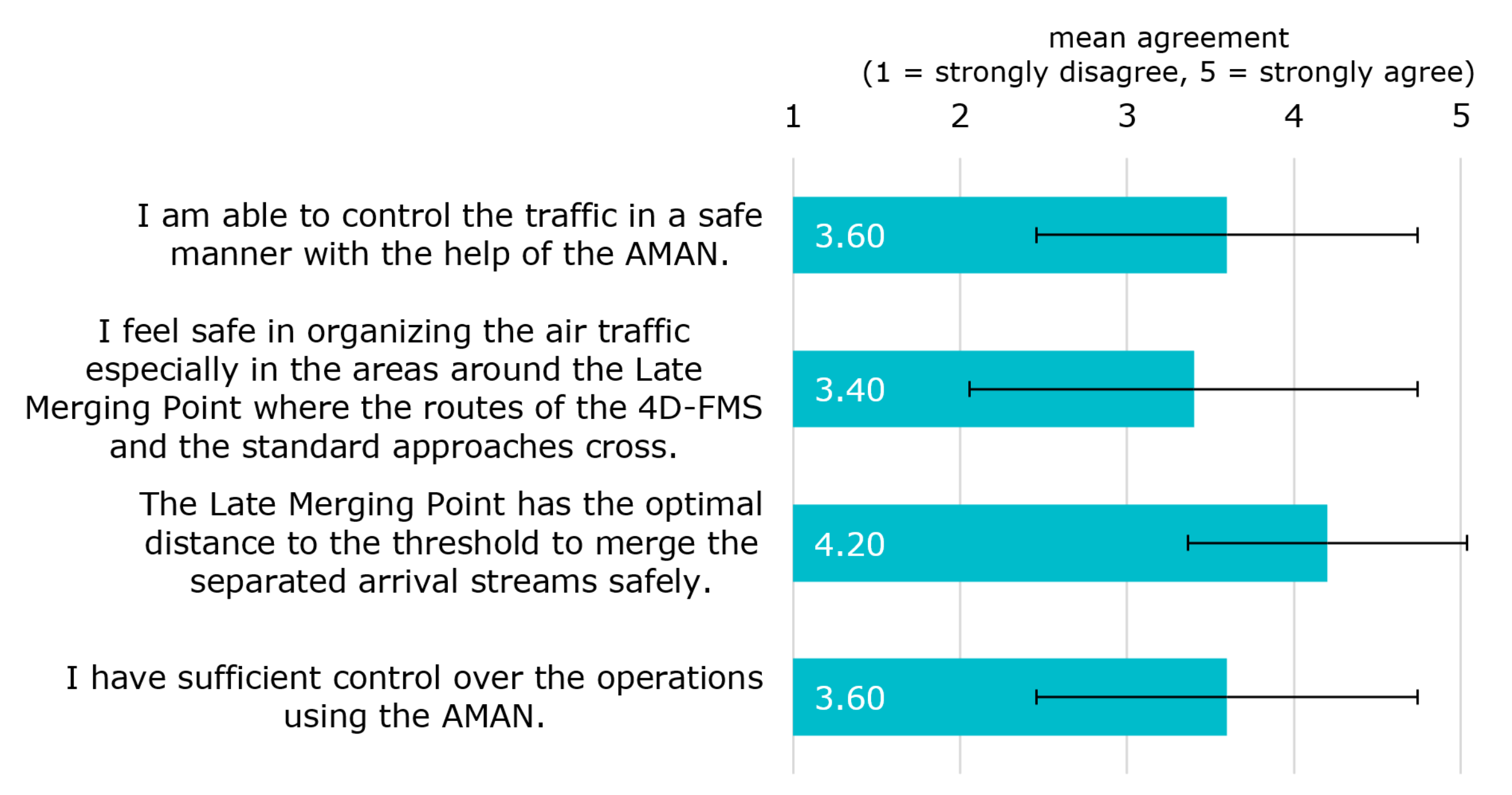
The bespoke statements regarding the perceived safety are shown in
Figure 13. All statements regarding the general perceived safety received a mean rating higher than three (neither agree nor disagree) at the minimum. From this rating, it became apparent that the ATCOs seemed to feel in control and safe in controlling the traffic, including the area around the LMP where the traffic was converging as well.
During the debriefing, the ATCOs reported overall safe operation within the new airspace design. Nevertheless, some safety-critical situations were reported, which are also shown in the recorded data. Critical situations were mainly related to the simulation setup, technical issues or lack of experience with the system—for instance, difficulty in judging distances due to lack of measurement tools in unknown airspace. Although aircraft might need to keep adjusting their flying speed constantly to meet the negotiated target times, no further risk was produced. These results reflect the subjective feedback from ATCOs gathered through the questionnaire and debriefing.
3.5. Tactical Assistance Systems
The feedback on the three tactical assistance systems was not free of contradictions. However, the main feedback was positive rather than negative, along with suggestions for possible improvements. All in all, the tactical assistance systems provided the required information about the projected aircraft’s positions on the final approach in line with the sequences computed by the AMAN. The provided information was reported by ATCO as helpful to obtaining the whole picture of the traffic situation and to plan ahead. Participants made also several suggestions to further improve the provided data, indicating that there is room for improvements. Some examples of the suggested improvements are listed in the following paragraph.
Based on feedback collected from all ATCOs, the time-based ghosting tool was one of the most used and useful assisting tools made available during the validation trials. It was even considered by most of ATCOs as necessary and crucial for handling the 4D-FMS traffic safety-wise. Participants reported also that they would even like to have it for real operations to be used for other purposes. Nevertheless, some ATCOs felt distracted by the ghost symbol, which could tie up mental capacity. Some would only like to have the sequence number above the ghost symbol or to reduce the label by displaying only the callsign. Others would like to see a special marker when the real aircraft deviates too much from the planned route due to certain environmental conditions. This request could be accommodated by enabling the ATCO to individually customise the ghost symbol using different shapes and colour settings. The ATCOs perceived the TargetWindow as helpful and sufficient for handling the conventional 3D-FMS traffic, making the CSVT superfluous. Consequently, the CSVT was rarely used. Additionally, the ATCOs recorded some minor technical stability issues, which means that in some cases, aircraft did not have a TargetWindow, or the label was shown on the wrong side of the runway system. As an improvement, some features should be made available to ATCOs, enabling them to manually adjust the label, shape and colour settings for the TargetWindow itself. This feedback is in line with feedback on the ghosting.
4. Discussion
The traffic and trajectories analysis results display that during the experimental scenarios, S30 and S60, the trajectories were on average 7.5% shorter than in the baselines R1 and R2. As cumulative events, it was found that the share of 4D-FMS aircraft allowed a greater number of flights to be implemented with shorter approach distances on average. Although the capacity was not planned to be addressed by this solution, it was observed that ATCO assistance tools effectively supported them in guiding the traffic during the validation activities. Taking that into consideration, it can be pointed out that a greater number of FMS equipped aircraft were more efficiently routed for landing by all ATCOs.
Based on ISA measurements, two conclusions for mental workload analysis can be drawn. Firstly, mental workload remained at acceptable levels in the S30 scenario and in the S60 scenario, pointing out that no mental overload arose. This evaluation was also confirmed through ATCOs’ feedback during the debriefing sessions. Nevertheless, ISA ratings during the S80 scenario pointed towards mental underload, because increasing automation took away much of the traffic guidance work. Mental workload could be expected to be lower in simulations than in real operations. However, since mental underload is a potential safety risk because crucial events can be missed, this should be tested in further validation campaigns with adjusted preconditions. For example, improved visualisation of the tactical assistance systems and a bigger sample size could be used. Secondly, the experienced ATCO’s mental workload seemed to be inversely related to the percentage of 4D-FMS aircraft. Increasing the amount of untouchable 4D-FMS aircraft results in a reduction in the share of 3D-FMS aircraft navigated by the ATCO. Indeed, the number of aircraft a ATCO manages simultaneously at a given time was the most used index to estimate the workload [
56]. However, this index is influenced by the way aircraft are spread over space and time [
56], and therefore, less aircraft to be managed does not necessarily result in less workload. An alternative explanation could be linked to the main task of the ATCO: Given the route structure (separated by design) and the sequence proposed by the AMAN (considering required separation), the ATCO mainly monitored and guided the 3D-FMS aircraft towards the TargetWindow to meet the optimal position on final approach, unless he decided to choose an alternative path based on direct routing. That being said, the higher the number of 4D-FMS aircraft, the less intervention is required from the ATCO, potentially resulting in lower mental workload.
The results from NASA TLX analysis point out that the mean global score and all mean sub-scores were higher in the S30 scenario than in the S60 scenario, indicating higher overall workload in the S30 scenario than in the S60 scenario on a descriptive level. Those results coincide with the ISA ratings. Additionally, standard deviations were especially high for the subscales frustration and performance. This means that a wide range of answers were attributed to these subscales. This divergence was also indicated during the debriefings and explorative simulation runs. For instance, some ATCOs felt comfortable being in charge of fewer 3D-FMS aircraft, while others pointed out their frustration about the untouchable character of 4D-FMS aircraft. Likewise, some ATCOs tried to further optimise the sequence proposed by the AMAN; others reported strictly following the proposed sequence. The latter might have impacted ATCOs’ perceived performance ratings. Nevertheless, the NASA TLX analysis shows that increasing the amount of 4D-FMS aircraft lowers the perceived ATCOs workload. This could result in more spare mental capacity, which can be used for other ATCOs tasks, such as safety monitoring or improving sequence planning.
During the debriefing session, ATCOs named both the ghosts and the TargetWindows as beneficial, if not essential, for increasing and maintaining situation awareness. However, one ATCO raised the concern that situation awareness will be lost if the share of 4D-FMS-equipped aircraft is too high. Communication between ATCOs and 4D-FMS pilots is reduced to a minimum after the initial call. Such a little amount of exchange of information could reduce situational awareness for specific aircraft. In short, it can be concluded that besides the discussed effects, the perceived ATCO situation awareness remained at an acceptable level for a 4D-FMS aircraft percentage of up to 60%. More research will be needed to assess the impact of higher percentages of untouchable 4D-FMS aircraft on situation awareness. Monitoring automated systems and assuming a more passive role instead of actively engaging with a system can impair situation awareness, possibly resulting in an out-of-the-loop performance problem [
57]. As a higher share of 4D-FMS aircraft leads to the ATCO passively monitoring more aircraft, an overly large number of 4D-FMS aircraft might result in lowered situation awareness. This possibility should be critically considered in future research.
To sum up, the new airspace design and supporting functions were considered as acceptable from ATCO perspectives in terms of safety. ATCOs felt able to provide the same safety level compared to current operations. Nevertheless, ATCOs addressed potential safety risks, such as the possible loss of situation awareness for overly high shares of 4D-FMS aircraft.
Although the qualitative and quantitative assessments provided promising initial results, it should be added that there exist still some limitations. Those limitations are mainly related to the constraints on the large-scale implementation of such systems. For example, no baseline scenario was used to compare human performance results. Additionally, the human performance data were analysed on a non-parametric, descriptive level; i.e., no statements can be made regarding statistically significant differences due to the sample size of five per iteration. Therefore, a bigger sample size should test the GreAT concept and its impacts on efficiency, mental workload and situation awareness.




 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












