


Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem



Abstract
1. Introduction
2. Materials and Methods
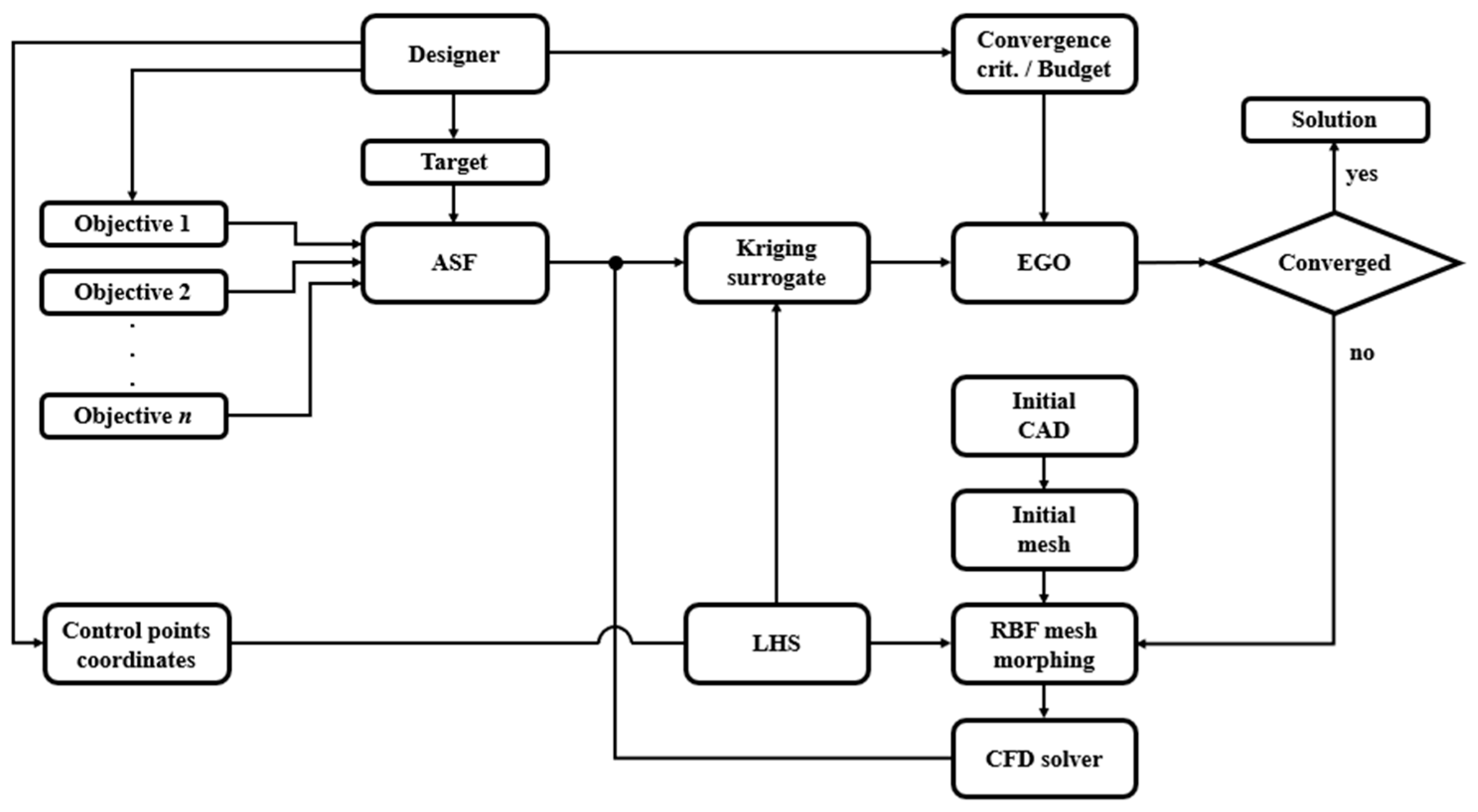
2.1. Optimization Framework
2.1.1. Kriging Surrogate
- Linearity—linear combination of random functions
- Unbiasedness—absence of systematic bias
- Minimal prediction variance—minimizing the mean squared error
2.1.2. RBF-Based Mesh Morphing
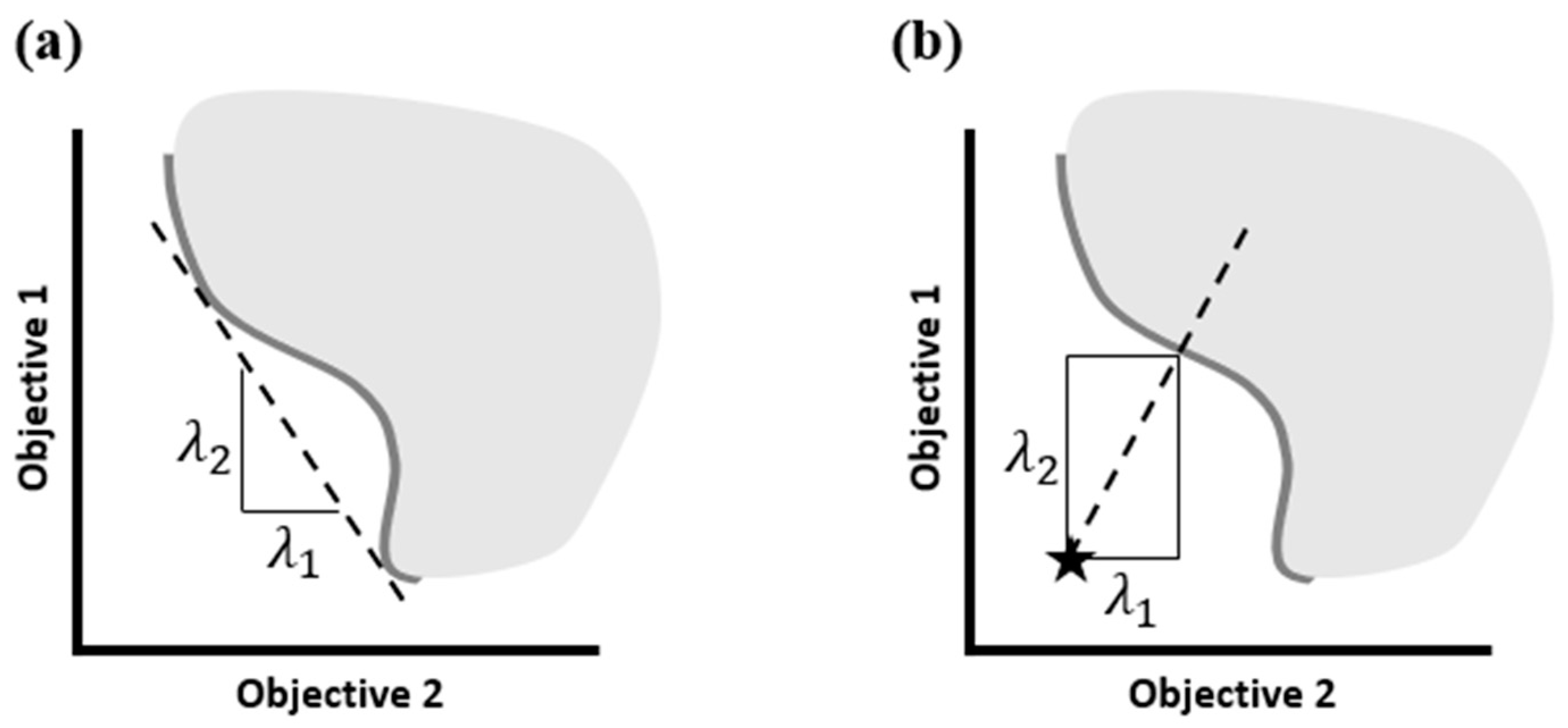
2.1.3. Achievement Scalarizing Function
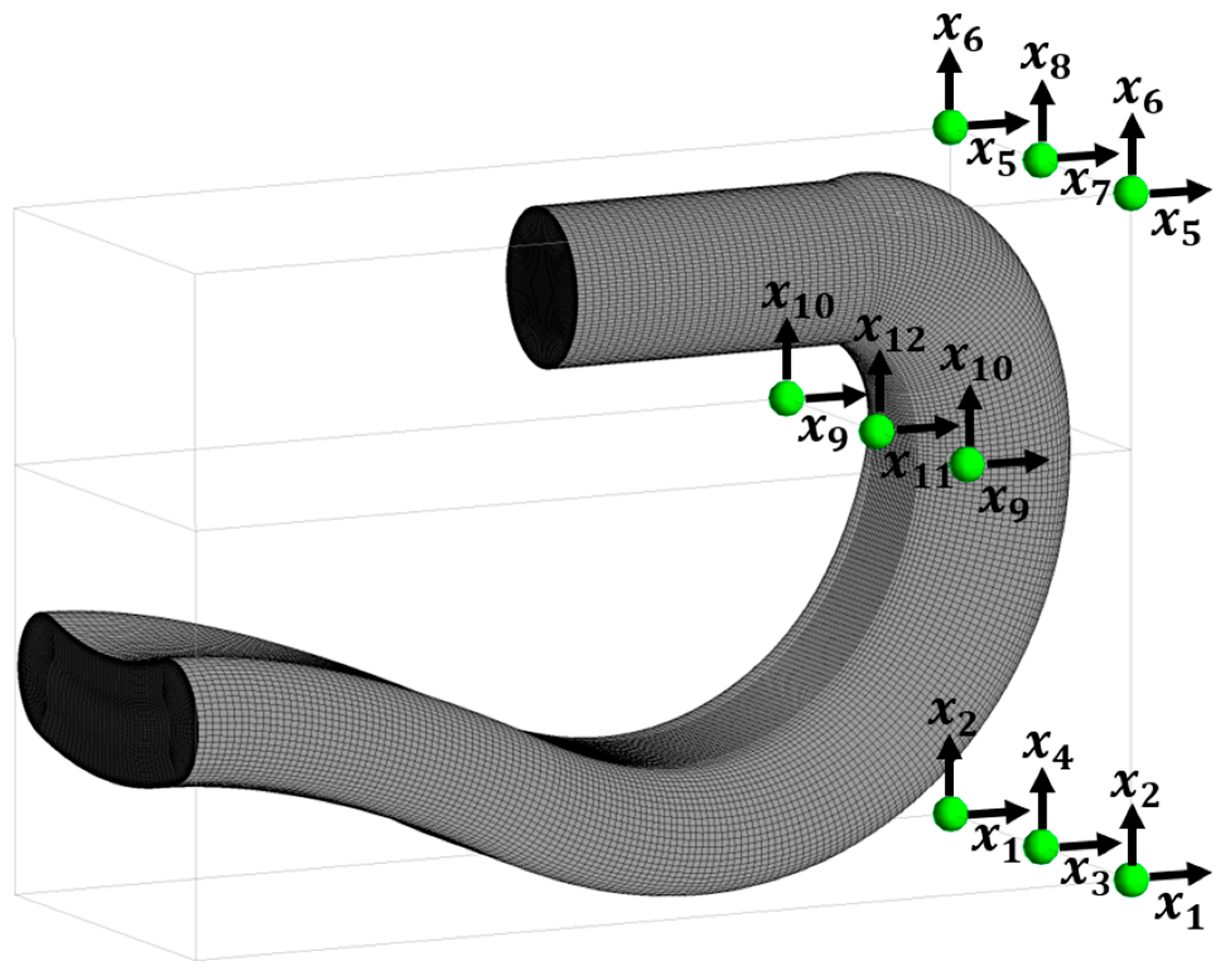
2.2. Optimization Problem
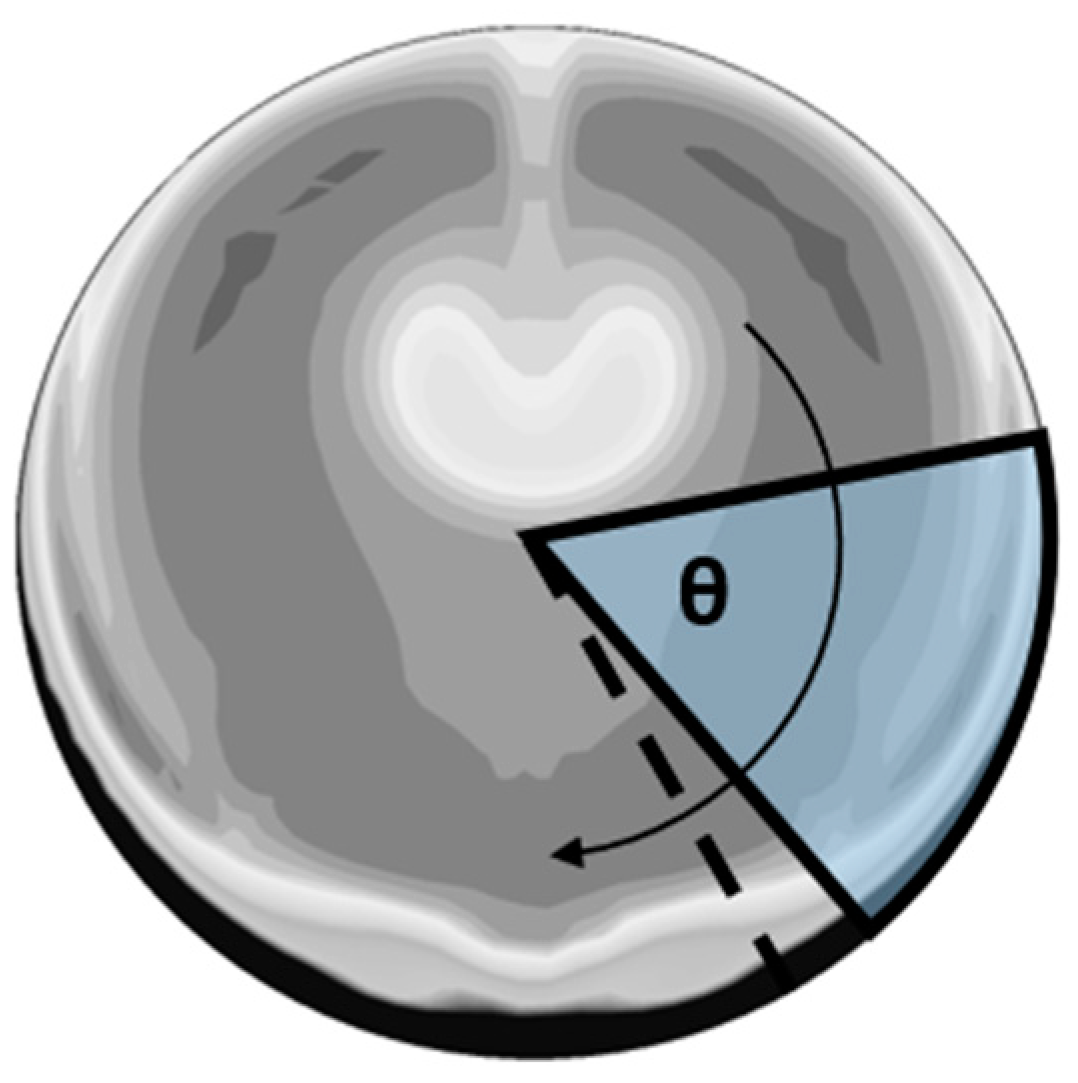
2.3. Evaluation of Objectives
2.3.1. Flow Solver Governing Equations
- The continuity equation:
- The momentum conservation equation:
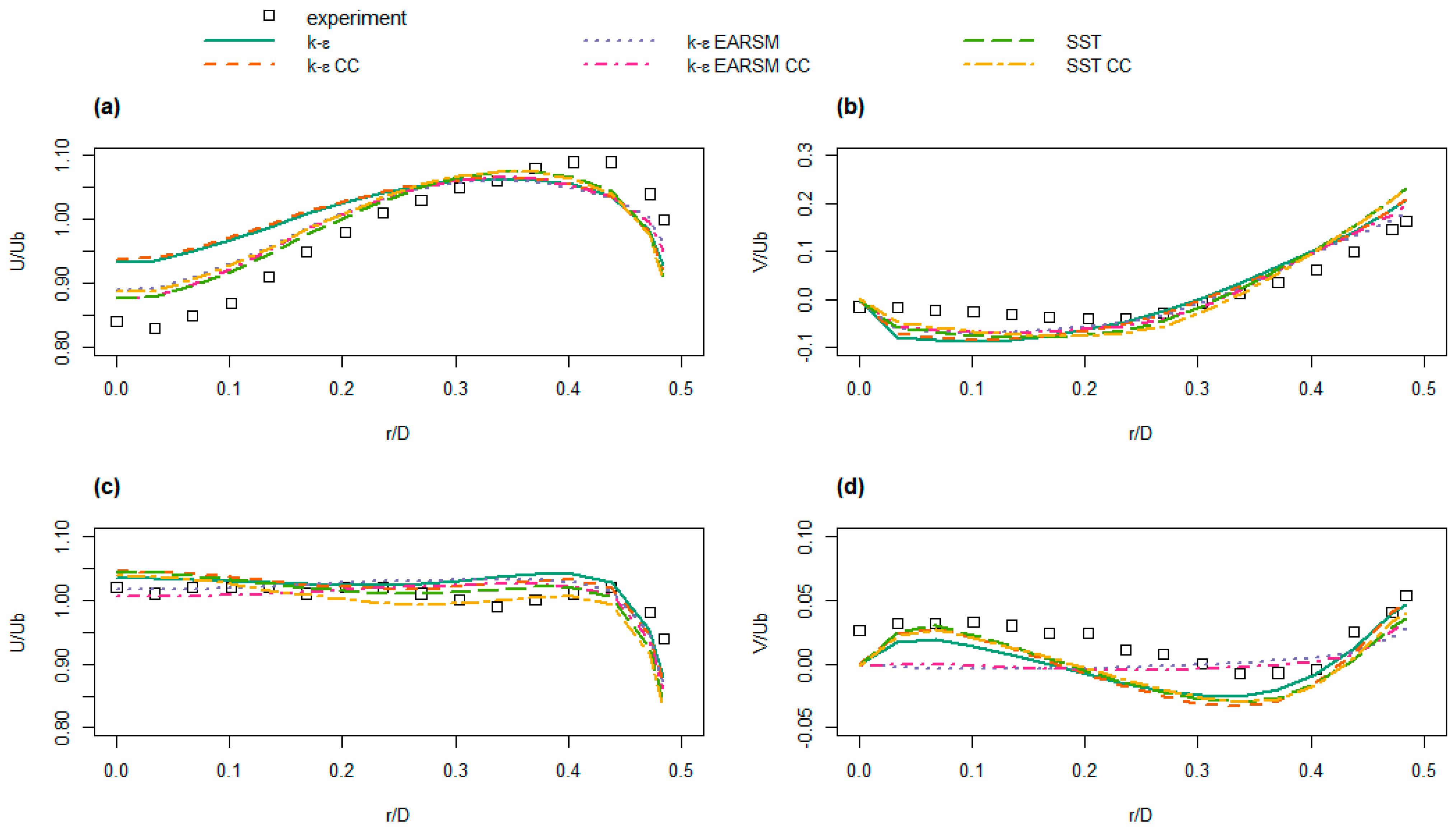
2.3.2. Validation of Turbulence Modeling Technique
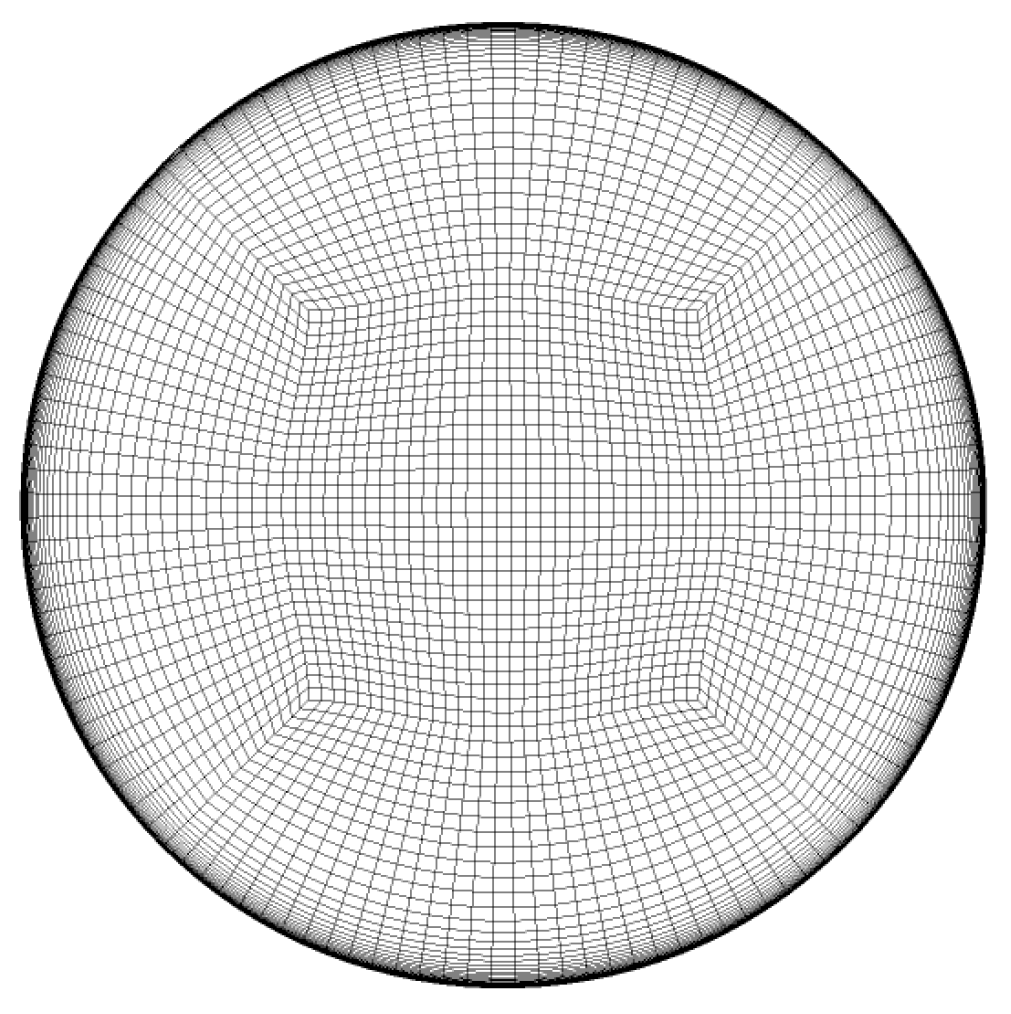
2.3.3. Details of the Flow Field Modeling Approach
3. Results and Discussion
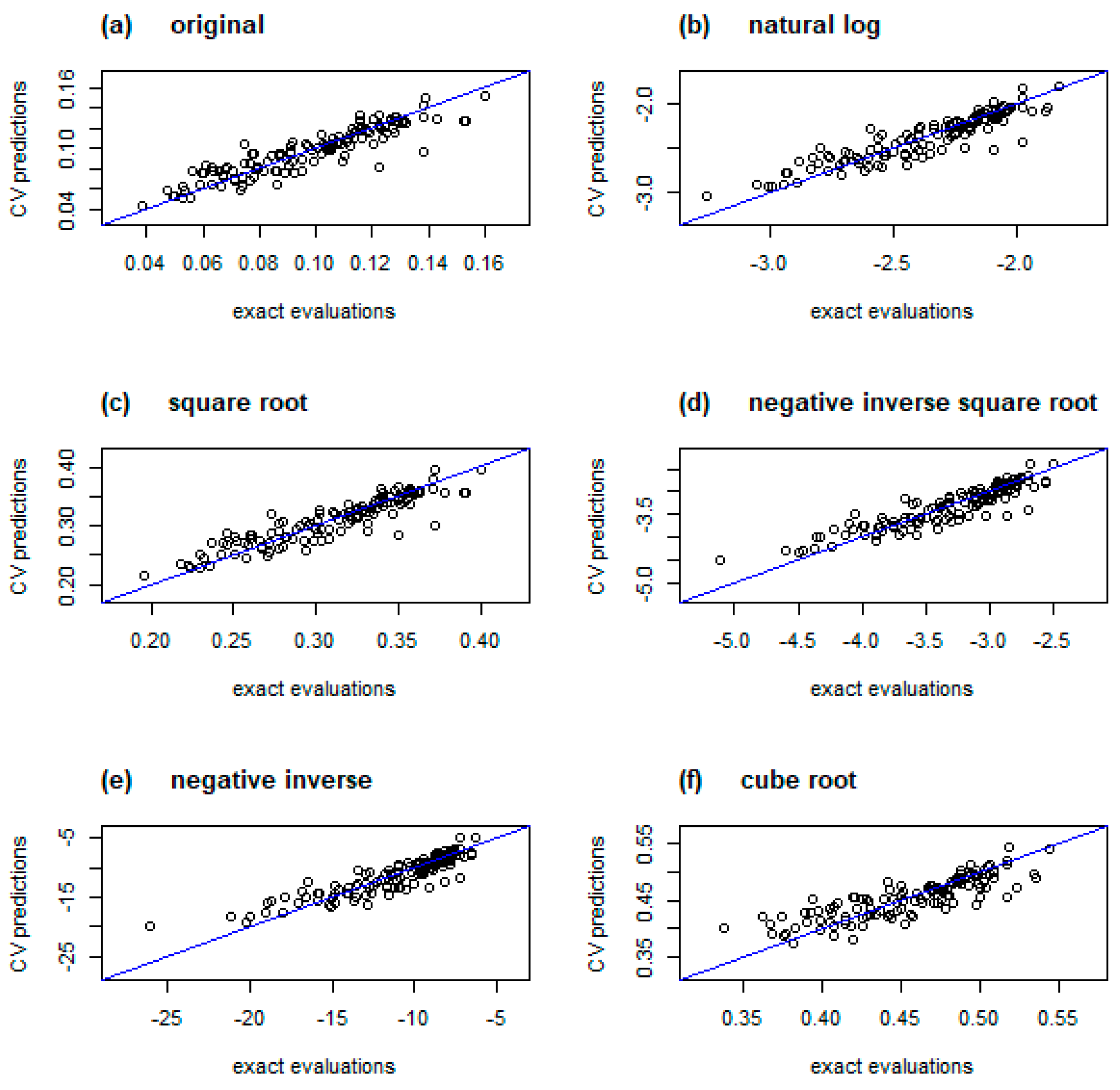
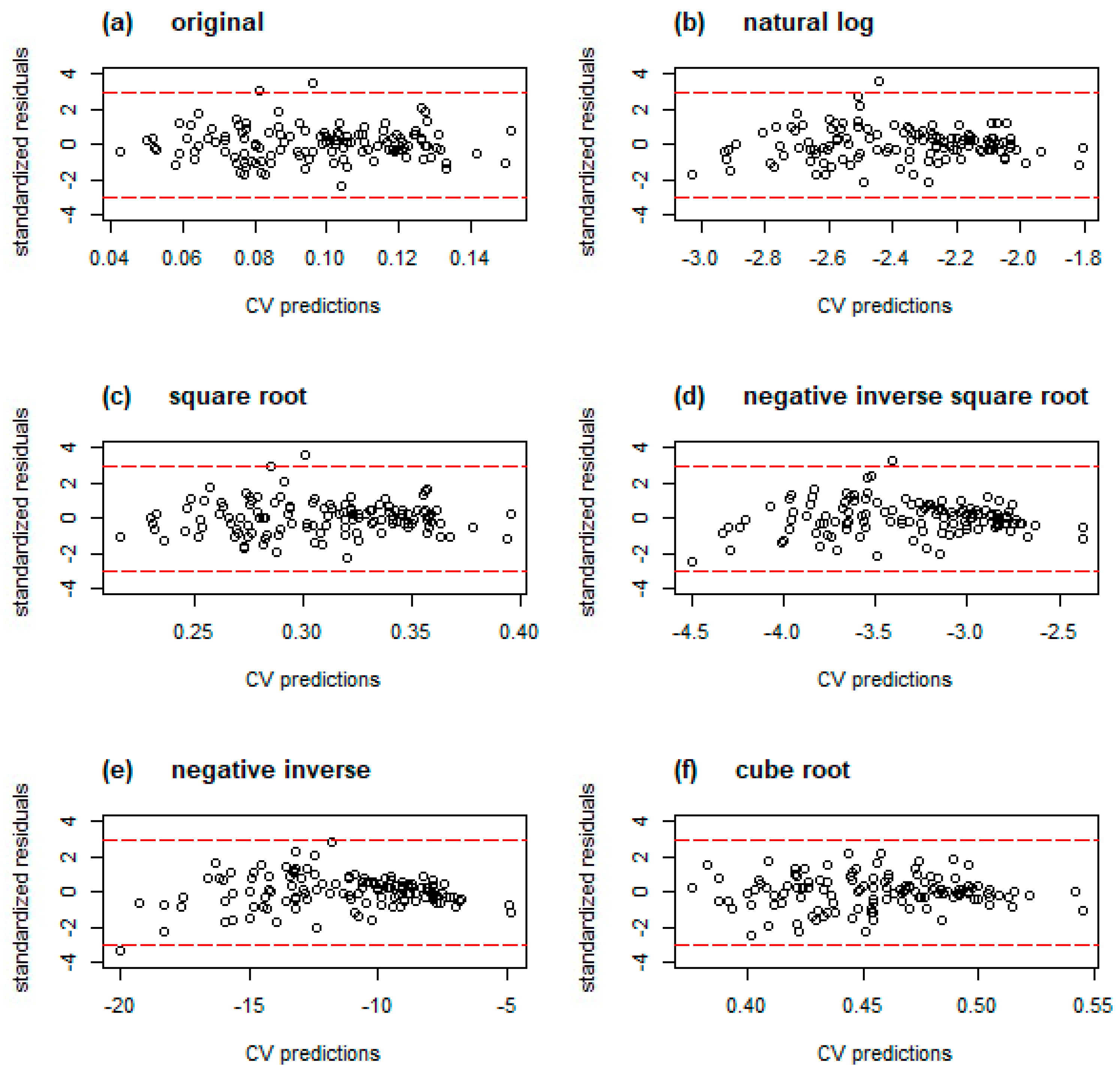
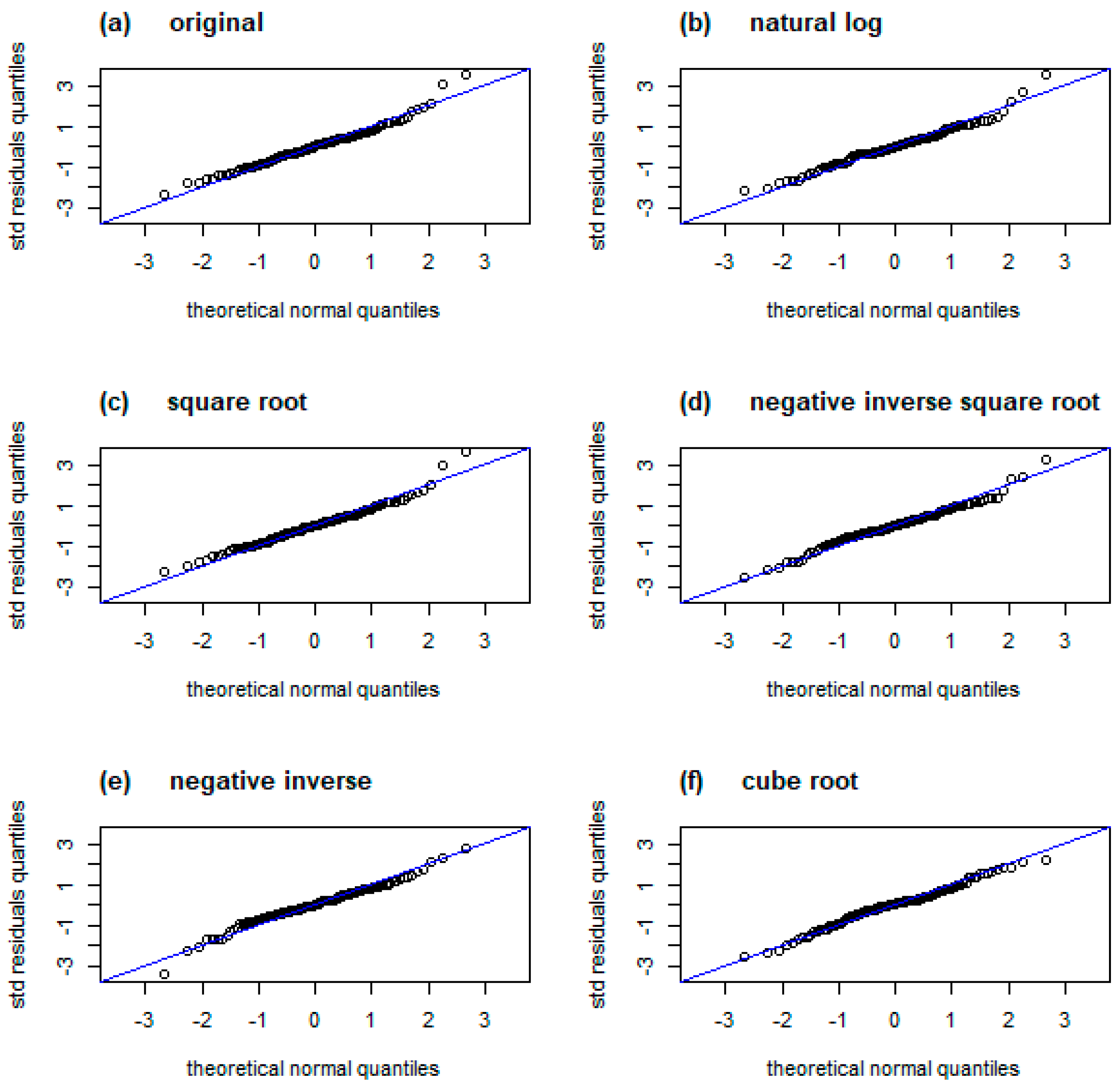
3.1. Metamodel Fit Validation
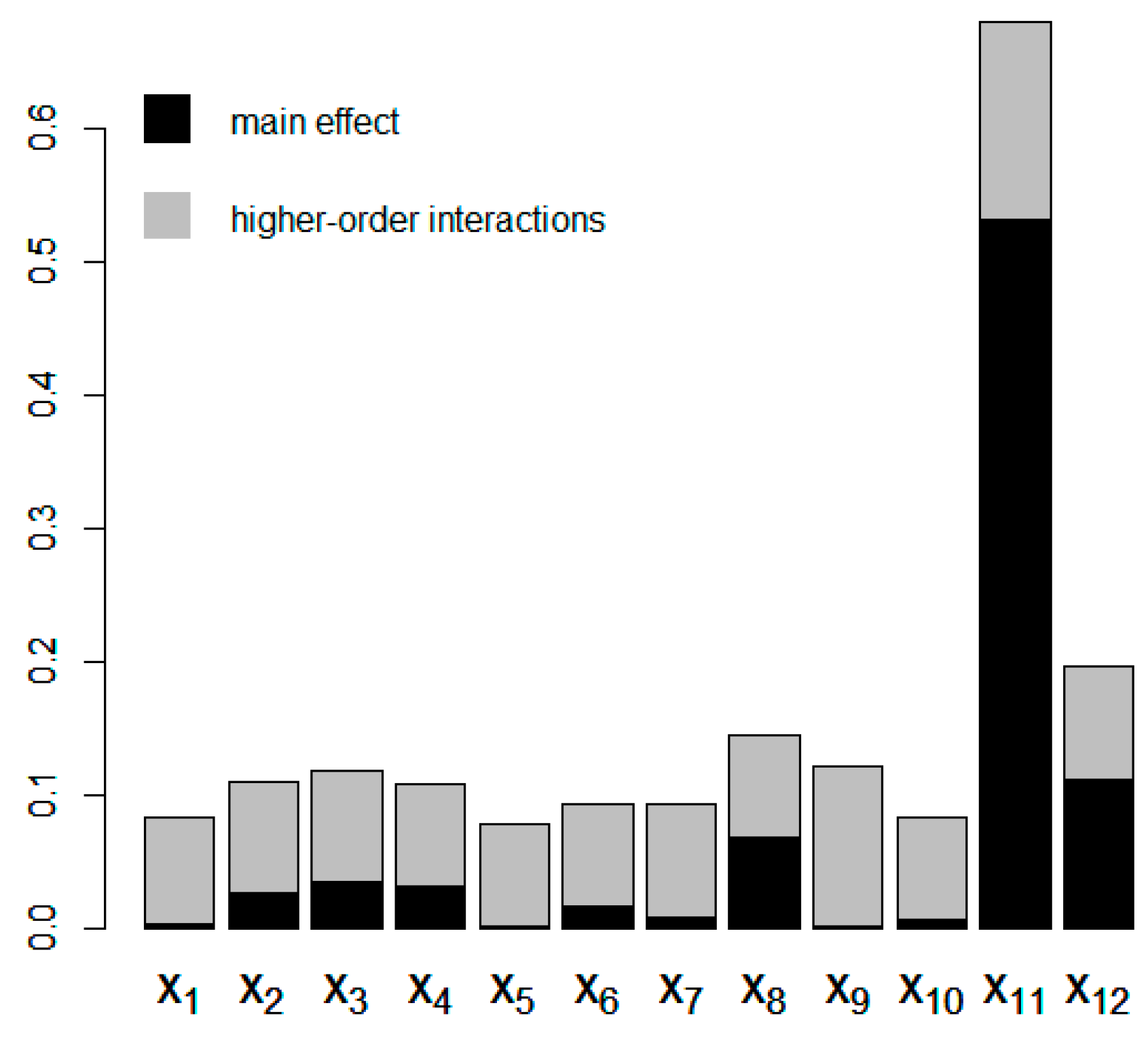
3.2. Sensitivity Analysis
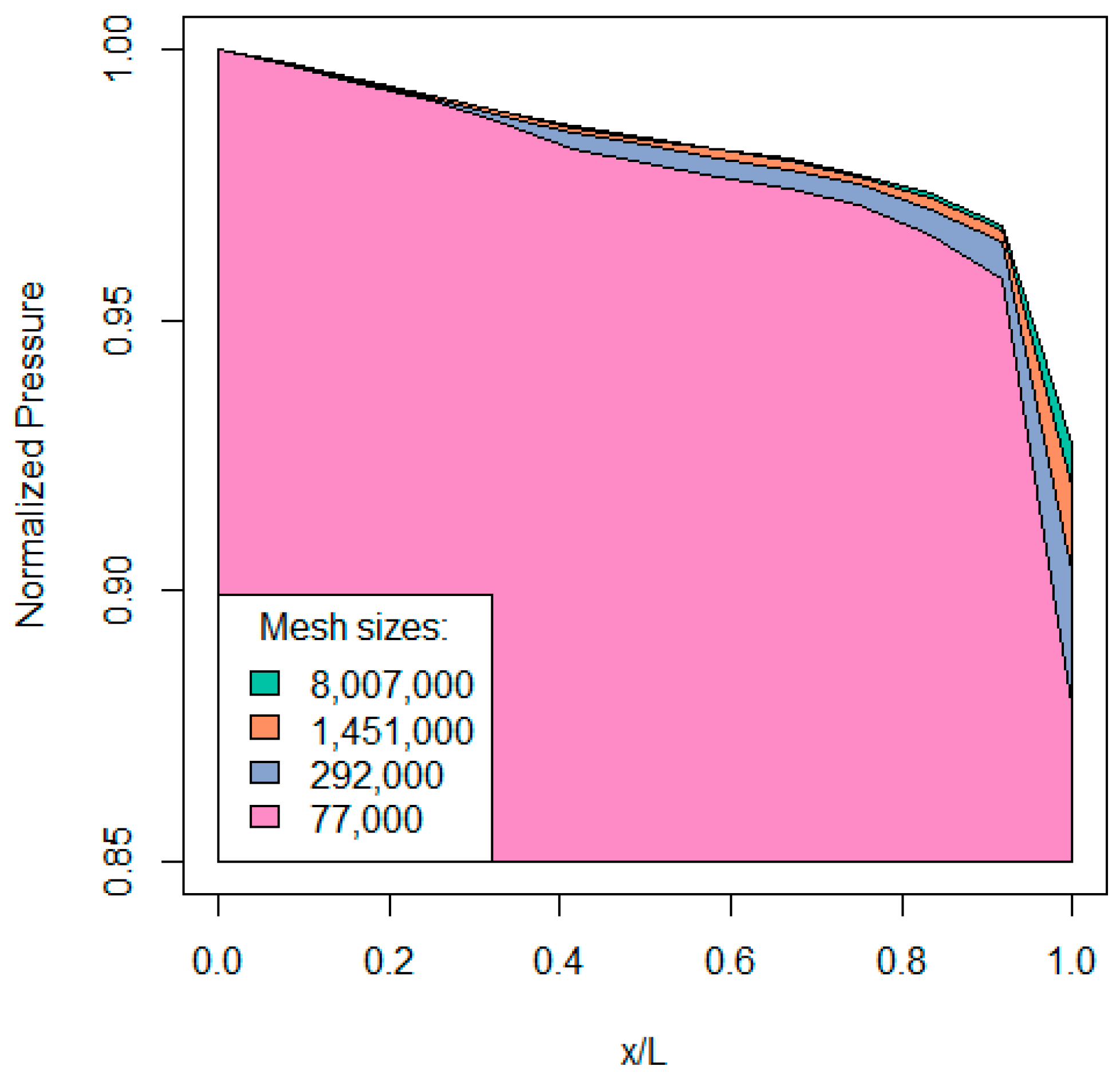
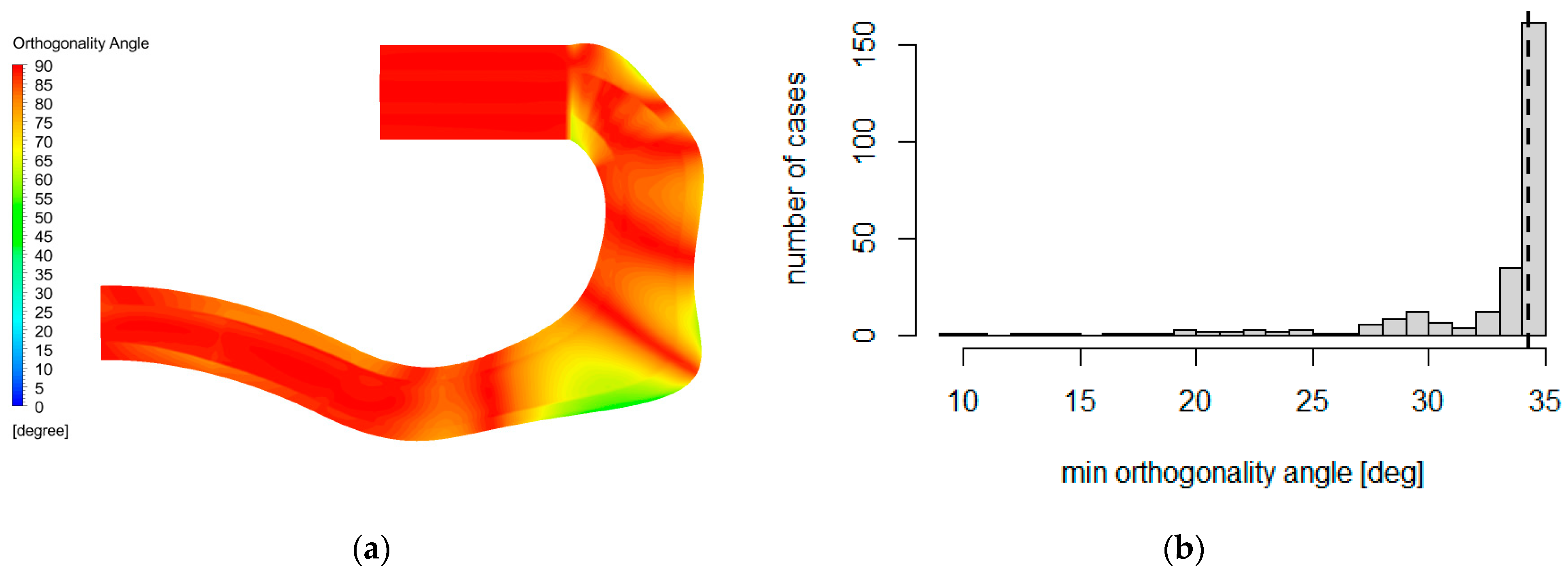
3.3. Assessment of Deformed Mesh Quality
3.4. Optimization Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
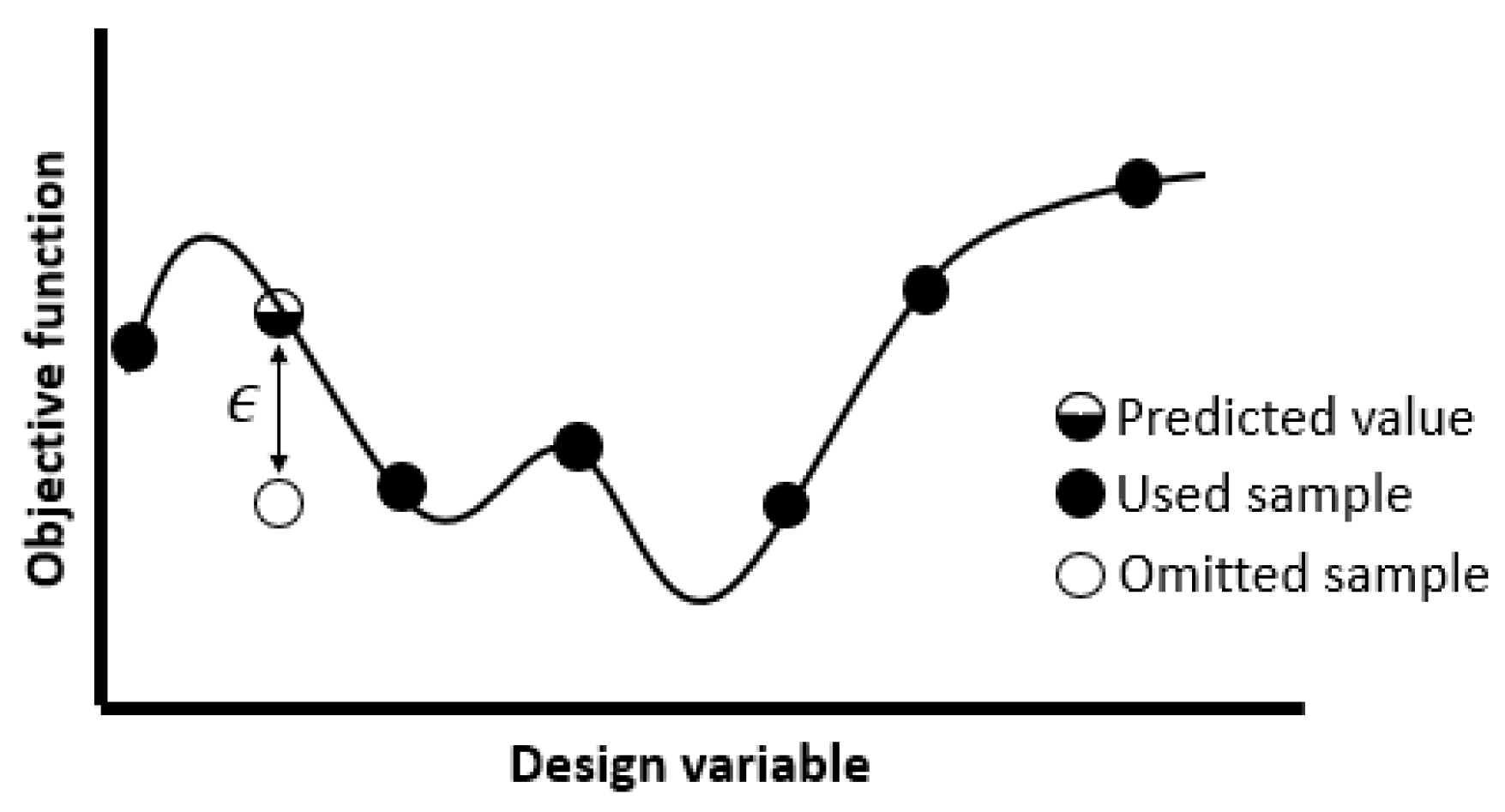
Appendix A. Leave-One-Out Cross-Validation

Appendix B. Functional Analysis of Variance (FANOVA)
References
- Airbus. Global Market Forecast 2022–2041. Available online: https://www.airbus.com/en/products-services/commercial-aircraft/market/global-market-forecast (accessed on 16 January 2023).
- Boeing. Boeing Commercial Market Outlook 2022–2041. Available online: https://www.boeing.com/resources/boeingdotcom/market/assets/downloads/CMO_2022_Report_FINAL_v02.pdf (accessed on 16 January 2023).
- European Commission Website. A European Green Deal-Striving to be the First Climate-Neutral Continent. Available online: https://ec.europa.eu/info/strategy/priorities-2019-2024/european-green-deal_en (accessed on 16 January 2023).
- Furlan, F.; Chiereghin, N.; Kipouros, T.; Benini, E.; Savill, M. Computational design of S-Duct intakes for distributed propulsion. Aircr. Eng. Aerosp. Technol. 2014, 86, 473–777. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison Wesley: Reading, UK, 1989. [Google Scholar]
- D’Ambros, A.; Kipouros, T.; Zachos, P.; Savill, M.; Benini, E. Computational Design Optimization for S-Ducts. Designs 2018, 2, 36. [Google Scholar] [CrossRef]
- Zeng, L.; Pan, D.; Ye, S.; Shao, X. A fast multiobjective optimization approach to S-duct scoop inlets design with both inflow and outflow. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 3381–3394. [Google Scholar] [CrossRef]
- Sharma, M.; Baloni, B.D. Design optimization of S-shaped compressor transition duct using particle swarm optimization algorithm. SN Appl. Sci. 2020, 2, 221. [Google Scholar] [CrossRef]
- Kennedy, J. Particle Swarm Optimization. In Encyclopedia of Machine Learning; Sammut, C., Webb, G.I., Eds.; Springer: Boston, MA, USA, 2011; pp. 760–766. [Google Scholar] [CrossRef]
- Wang, G.G.; Shan, S. Review of Metamodeling Techniques in Support of Engineering Design Optimization. J. Mech. Des. 2007, 129, 370–380. [Google Scholar] [CrossRef]
- Simpson, T.W.; Poplinski, J.D.; Koch, P.N.; Allen, J.K. Metamodels for Computer-based Engineering Design: Survey and recommendations. Eng. Comput. 2001, 17, 129–150. [Google Scholar] [CrossRef]
- Han, Z.-H.; Zhang, K.-S. Surrogate-Based Optimization. In Real-World Applications of Genetic Algorithms; Roeva, O., Ed.; InTech: London, UK, 2012; pp. 343–362. [Google Scholar]
- Skinner, S.N. State-of-the-art in aerodynamic shape optimisation methods. Appl. Soft Comput. J. 2018, 62, 933–962. [Google Scholar] [CrossRef]
- Forrester, A.I.J.; Keane, A.J. Recent advances in surrogate-based optimization. Prog. Aerosp. Sci. 2009 45, 50–79. [CrossRef]
- Snyman, J.A.; Wilke, D.N. Practical Mathematical Optimization–Basic Optimization Theory and Gradient-Based Algorithms, 2nd ed.; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Khuri, A.I.; Mukhopadhyay, S. Response surface methodology. WIREs Comp. Stat. 2010, 2, 128–149. [Google Scholar] [CrossRef]
- Friedman, J.H. Multivariate Adaptive Regression Splines. Ann. Stat. 1991, 19, 1–67. [Google Scholar] [CrossRef]
- Regis, R.G.; Shoemaker, C.A. Constrained Global Optimization of Expensive Black Box Functions Using Radial Basis Functions. J. Glob. Optim. 2005, 31, 153–171. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 3rd ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Krige, D.G. A Statistical Approach to Some Basic Mine Valuation Problems on the Witwatersrand. J. Chem. Metall. Soc. S. Min. Afr. 1951, 52, 119–139. [Google Scholar] [CrossRef]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Sacks, J.; Welch, W.J.; Mitchell, J.S.B.; Henry, P.W. Design and Experiments of Computer Experiments. Stat. Sci. 1989, 4, 409–423. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient Global Optimization of Expensive Black-Box Functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Lu, H.; Zheng, X.; Li, Q. A combinatorial optimization design method applied to S-shaped compressor transition duct design. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1749–1758. [Google Scholar] [CrossRef]
- Immonen, E. Shape optimization of annular S-ducts by CFD and high-order polynomial response surfaces. Eng. Comput. 2018, 35, 932–954. [Google Scholar] [CrossRef]
- Gan, W.; Zhang, X. Design optimization of a three-dimensional diffusing S-duct using a modified SST turbulent model. Aerosp. Sci. Technol. 2017, 63, 63–72. [Google Scholar] [CrossRef]
- Jin, D.; Liu, X.; Zhao, W.; Gui, X. Optimization of endwall contouring in axial compressor S-shaped ducts. Chin. J. Aeronaut. 2015, 28, 1076–1086. [Google Scholar] [CrossRef]
- Zerbinati, A.; Désidéri, J.A.; Duvigneau, R. Application of metamodel-assisted Multiple-Gradient Descent Algorithm (MGDA) to air-cooling duct shape optimization. In Proceedings of the ECCOMAS—European Congress on Computational Methods in Applied Sciences and Engineering-2012, Vienna, Austria, 10–14 September 2012. [Google Scholar]
- Verstraete, T.; Coletti, F.; Bulle, J.; Vanderwielen, T.; Arts, T. Optimization of a U-Bend for Minimal Pressure Loss in Internal Cooling Channels: Part I—Numerical Method. ASME J. Turbomach. 2013, 135, 051015. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Verstraete, T.; Li, J. Multi-Objective Optimization of a U-Bend for Minimal Pressure Loss and Maximal Heat Transfer Performance in Internal Cooling Channels. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition Volume 3A: Heat Transfer, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar] [CrossRef]
- Koo, G.-W.; Lee, S.-M.; Kim, K.-Y. Shape optimization of inlet part of a printed circuit heat exchanger using surrogate modeling. Appl. Therm. Eng. 2014, 72, 90–96. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Q. Numerical Optimization of Electromagnetic Performance and Aerodynamic Performance for Subsonic S-Duct Intake. Aerospace 2022, 9, 665. [Google Scholar] [CrossRef]
- Bae, H.; Park, S.; Kwon, J. Efficient global optimization for S-duct diffuser shape design. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2013, 227, 1516–1532. [Google Scholar] [CrossRef]
- Dehghani, M.; Ajam, H.; Farahat, S. Automated Diffuser Shape Optimization based on CFD Simulations and Surrogate Modeling. J. Appl. Fluid Mech. 2016, 9, 2527–2535. [Google Scholar] [CrossRef]
- Marchlewski, K.; Łaniewski-Wołłk, Ł.; Kubacki, S. Aerodynamic Shape Optimization of a Gas Turbine Engine Air-Delivery Duct. J. Aerosp. Eng. 2020, 33, 04020042. [Google Scholar] [CrossRef]
- Drężek, P.S.; Kubacki, S.; Żółtak, J. Multi-objective surrogate model-based optimization of a small aircraft engine air-intake duct. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 2909–2921. [Google Scholar] [CrossRef]
- Nikulin, Y.; Miettinen, K.; Mäkelä, M.M. A new achievement scalarizing function based on parameterization in multiobjective optimization. OR Spectr. 2012, 34, 69–87. [Google Scholar] [CrossRef]
- Biancolini, M.E.; Costa, E.; Cella, U.; Groth, C.; Veble, G.; Andrejašič, M. Glider fuselage-wing junction optimization using CFD and RBF mesh morphing. Aircr. Eng. Aerosp. Technol. 2016, 88, 740–752. [Google Scholar] [CrossRef]
- Kapsoulis, D.; Asouti, V.; Giannakoglou, K.; Porziani, S.; Costa, E.; Groth, C.; Cella, U.; Biancolini, M.V. Evolutionary aerodynamic shape optimization through the RBF4AERO platform. In Proceedings of the VII European Congress on Computational Methods in Applied Sciences and Engineering (ECCOMAS Congress 2016) Crete, Greece, 5–10 June 2016; Institute of Structural Analysis and Antiseismic Research, School of Civil Engineering, National Technical University of Athens (NTUA): Athens, Greece; pp. 4146–4155. [CrossRef]
- Savastano, W.; Pranzitelli, A.; Andrews, G.E.; Biancolini, M.E.; Ingham, D.B.; Pourkashanian, M. Goal Driven Shape Optimisation for Conjugate Heat Transfer in an Effusion Cooling Plate. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, Montreal, Quebec, Canada, 15–19 June 2015; The American Society of Mechanical Engineers: New York, NY, USA, 2015; Volume 5A: Heat Transfer. [Google Scholar] [CrossRef]
- Mastrippolito, F.; Aubert, S.; Ducros, F.; Buisson, M. RBF-based mesh morphing improvement using Schur complement ap-plied to rib shape optimization. Int. J. Numer. Methods Heat Fluid Flow 2020, 30, 4241–4257. [Google Scholar] [CrossRef]
- Brahmachary, S.; Fujio, C.; Aksay, M.; Ogawa, H. Design optimization and off-design performance analysis of axisymmetric scramjet intakes for ascent flight. Phys. Fluids 2022, 34, 036109. [Google Scholar] [CrossRef]
- Brahmachary, S.; Fujio, C.; Ogawa, H. Multi-point design optimization of a high-performance intake for scramjet-powered ascent flight. Aerosp. Sci. Technol. 2020, 107, 106362. [Google Scholar] [CrossRef]
- Fujio, C.; Ogawa, H. Physical insights into multi-point global optimum design of scramjet intakes for ascent flight. Acta Astronaut. 2022, 194, 59–75. [Google Scholar] [CrossRef]
- Chiang, C.; Koo, D.; Zingg, D.W. Aerodynamic Shape Optimization of an S-Duct Intake for a Boundary-Layer Ingesting Engine. J. Aircr. 2022, 59, 725–741. [Google Scholar] [CrossRef]
- Park, J.-S.; Baek, J. Efficient computation of maximum likelihood estimators in a spatial linear model with power exponential covariogram. Comput. Geosci. 2001, 27, 1–7. [Google Scholar] [CrossRef]
- Roustant, O.; Ginsbourger, D.; Deville, Y. DiceKriging, DiceOptim: Two R Packages for the Analysis of Computer Experiments by Kriging-Based Metamodeling and Optimization. J. Stat. Softw. 2012, 51, 1–55. [Google Scholar] [CrossRef]
- Liu, H.; Ong, Y.-S.; Cai, J. A survey of adaptive sampling for global metamodeling in support of simulation-based complex engineering design. Struct. Multidiscip. Optim. 2018, 57, 393–416. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A Comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 1979, 21, 239–245. [Google Scholar] [CrossRef]
- Viana, F.A.C. Things You Wanted to Know About the Latin Hypercube Design and Were Afraid to Ask. In Proceedings of the 10th World Congress on Structural and Multidisciplinary Optimization, Orlando, FL, USA, 19–24 May 2013. [Google Scholar]
- Crombecq, K.; Couckuyt, I.; Gorissen, D.; Dhaene, T. Space-Filling Sequential Design Strategies for Adaptive Surrogate Modelling. In The First International Conference on Soft Computing Technology in Civil, Structural and Environmental Engineering, Funchal Madeira, Portugal, 1–4 September 2009; Civil-Comp Press: Stirlingshire, UK, 2009. [Google Scholar] [CrossRef]
- Liefvendahl, M.; Stocki, R. A study on algorithms for optimization of Latin hypercubes. J. Stat. Plan Inference 2006, 136, 3231–3247. [Google Scholar] [CrossRef]
- Santner, T.J.; Williams, B.J.; Notz, W.I. Space-Filling Designs for Computer Experiments. In The Design and Analysis of Computer Experiments Springer Series in Statistics; Springer: New York, NY, USA, 2018; pp. 145–200. [Google Scholar]
- Carnell, R. lhs: Latin Hypercube Samples. R Package v. 1.0.1.2019. Available online: https://CRAN.R-project.org/package=lhs. (accessed on 11 January 2023).
- Loeppky, J.L.; Sacks, J.; Welch, W.J. Choosing the Sample Size of a Computer Experiment: A Practical Guide. Technometrics 2009, 51, 366–376. [Google Scholar] [CrossRef]
- Mebane, W.R.; Sekhon, J.S. Genetic optimization using derivatives: The rgenoud package for R. J. Stat. Softw. 2011, 42, 1–26. [Google Scholar] [CrossRef]
- Duchon, J. Splines minimizing rotation-invariant semi-norms in Sobolev spaces. In Constructive Theory of Functions of Several Variables Lecture Notes in Mathematics; Schempp, W., Zeller, K., Eds.; Springer: Berlin/Heidelberg, Germany, 1977; pp. 85–100. [Google Scholar]
- Sandwell, D.T. Biharmonic spline interpolation of GEOS-3 and SEASAT altimeter data. Geophys. Res. Lett. 1987, 14, 139–142. [Google Scholar] [CrossRef]
- Buhmann, M.D. Radial Basis Functions: Theory and Implementations; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Wendland, H. Scattered Data Approximation; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Gneiting, T. Radial Positive Definite Functions Generated by Euclid’s Hat. J. Multivar. Anal. 1999, 69, 88–119. [Google Scholar] [CrossRef]
- Tezzele, M.; Demo, N.; Mola, A.; Rozza, G. PyGeM: Python Geometrical Morphing. Softw. Impacts 2021, 7, 100047. [Google Scholar] [CrossRef]
- Knupp, P.M. Algebraic mesh quality metrics for unstructured initial meshes. Finite Elem. Anal. Des. 2003, 39, 217–241. [Google Scholar] [CrossRef]
- Knupp, P.M. Remarks on mesh quality. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. Also available as Sandia National Laboratories SAND2007-8128C. [Google Scholar]
- Marler, R.T.; Arora, J.S. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Baron, A. Samolot Osobowy I-23 “Manager”. Wybrane Problemy Badawcze; Wydawnictwa Naukowe Sieci Badawczej Łukasiewicz–Instytutu Lotnictwa: Warszawa, Poand, 2012. (In Polish) [Google Scholar]
- Efficient Systems and Propulsion for Small Aircraft Project. Available online: http://www.esposa-project.eu/ (accessed on 9 January 2023).
- Guła, P.; Ulma, D.; Żurek, K.; Żurawski, R. Challenges of turboprop engine installation on small aircraft. Aircr. Eng. Aerosp. Technol. 2019, 91, 938–948. [Google Scholar] [CrossRef]
- Iwaniuk, A.; Wiśniowski, W.; Żółtak, J. Multi-disciplinary optimisation approach for a light turboprop aircraft-engine integration and improvement. Aircr. Eng. Aerosp. Technol. 2016, 88, 348–355. [Google Scholar] [CrossRef]
- Idzikowski, M.; Miksa, W. Flight Tests of Turboprop Engine with Reverse Air Intake System. Trans. Aerosp. Res. 2018, 2018, 26–36. [Google Scholar] [CrossRef]
- Idzikowski, M.; Miksa, W. Ground and in-Fligh Testing of Cooling Efficiency of Turboprop Engine Compartment. Trans. Aerosp. Res. 2018, 2018, 17–25. [Google Scholar] [CrossRef]
- Stalewski, W.; Żółtak, J. The preliminary design of the air-intake system and the nacelle in the small aircraft-engine integration process. Aircr. Eng. Aerosp. Technol. 2014, 86, 250–258. [Google Scholar] [CrossRef]
- Stalewski, W.; Żółtak, J. Multi-objective and multidisciplinary optimization of wing for small aircraft. In Proceedings of the International Conference of the European Aerospace Societies Congress, Venice, Italy, 24–28 October 2011; pp. 1015–1024. [Google Scholar]
- Stalewski, W.; Żółtak, J. Multicriteria Design and Optimisation of Helicopter Fuselage. In Evolutionary and Deterministic Methods for Design, Optimization and Control with Application to Industrial and Societal Problems; Poloni, C., Quaglarella, D., Periaux, J., Gauger, N., Giannakoglou, K., Eds.; CIRA: Capua, Italy, 2011; pp. 518–529. [Google Scholar]
- Stalewski, W. PARADES—Program wspierający parametryczne projektowanie i optymalizację złożonych obiektów aerodynamicznych. In Projektowanie i Optymalizacja Aerodynamiczna Wiropłatów; Wydawnictwa Naukowe Instytutu Lotnictwa: Warszawa, Poland, 2017. [Google Scholar]
- Reid, C. The Response of Axial Flow Compressors to Intake Flow Distortion. In Proceedings of the ASME 1969 Gas Turbine Conference and Products Show, Cleveland, OH, USA, 9–13 March 1969; The American Society of Mechanical Engineers: New York, NY, USA, 1969. [Google Scholar] [CrossRef]
- United States Committee on Extension to the Standard Atmosphere, N.A.S.A.; United States Air Force, U.S. Standard Atmosphere, 1976. In Report No.: NASA-TM-X-74335; National Oceanic and Atmospheric Administration: Washington, DC, USA, 1976. Available online: https://ntrs.nasa.gov/citations/19770009539 (accessed on 14 January 2023).
- Kalpakli Vester, A.; Örlü, R.; Alfredsson, P.H. Turbulent Flows in Curved Pipes: Recent Advances in Experiments and Simulations. Appl. Mech. Rev. 2016, 68, 050802. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modelling for CFD, 3rd ed.; Dcw Industries, Inc.: Los Angeles, CA, USA, 2006. [Google Scholar]
- Menter, F. Zonal Two Equation Kw Turbulence Models for Aerodynamic Flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. In Turbulence Heat and Mass Transfer 4; Hanjalic, K., Nagano, Y., Tummers, M., Eds.; Begell House: Danbury, UK, 2003. [Google Scholar]
- Azzola, J.; Humphrey, J.A.C.; Iacovides, H.; Launder, B.E. Developing Turbulent Flow in a U-Bend of Circular Cross-Section: Measurement and Computation. J. Fluids Eng. 1986, 108, 214–221. [Google Scholar] [CrossRef]
- Azzola, J.; Humphrey, J.A.C. Developing Turbulent Flow in a 180° Curved Pipe and Its Downstream Tangent. Lawrence Berkeley National Laboratory; Report No.: LBL-17681. 1984. Available online: https://escholarship.org/uc/item/1fg887fq (accessed on 11 January 2023).
- Barth, T.; Jespersen, D. The design and application of upwind schemes on unstructured meshes. In Proceedings of the 27th Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1989; p. 366. [Google Scholar] [CrossRef]
- Congdon, C.; Martin, J. On Using Standard Residuals as a Metric of Kriging Model Quality. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–27 April 2007. [Google Scholar] [CrossRef]
- Miles, B.W.J.; Stokes, C.R.; Vieli, A.; Cox, N.J. Rapid, climate-driven changes in outlet glaciers on the Pacific coast of East Antarctica. Nature 2013, 500, 563–566. [Google Scholar] [CrossRef]
- Sobol′, I.M. Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math. Comput Simul. 2001, 55, 271–280. [Google Scholar] [CrossRef]
- Sobol’, I.M. Sensitivity estimates for nonlinear mathematical models. Math. Model. Comput. Exp. 1993, 1, 407–414. [Google Scholar]
- Martin, J.D.; Simpson, T.W. Use of Kriging Models to Approximate Deterministic Computer Models. AIAA J. 2005, 43, 853–863. [Google Scholar] [CrossRef]
- Saltelli, A.; Tarantola, S.; Chan, K.P.S. A Quantitative Model-Independent Method for Global Sensitivity Analysis of Model Output. Technometrics 1999, 41, 39–56. [Google Scholar] [CrossRef]
- Iooss, B.; Janon, A.; Pujol, G.; Boumhaout, K.; Da Veiga, S.; Delage, T.; Monari, F.; Oomen, R.; Ramos, B.; Sarazin, G.; et al. Sensitivity: Global Sensitivity Analysis of Model Outputs. 2018. R Package v. 1.15.2. Available online: https://cran.r-project.org/package=sensitivity (accessed on 11 January 2023).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variable | Range of Displacement |
|---|---|
| Design Point | Altitude (m) | A/C Velocity (m/s) | Ambient Pressure (Pa) | Ambient Temperature (K) | Ambient Density (kg/m3) | Engine Mass Flow Rate (kg/s) |
|---|---|---|---|---|---|---|
| DP1: Nominal cruise | 3000 | 65 | 69,700 | 268.6 | 0.909 | 1.5 |
| DP2: Low-altitude climb | 100 | 46 | 100,129 | 287.5 | 1.213 | 1.9 |
| DP3: High-altitude cruise | 3700 | 71 | 64,089 | 264.1 | 0.845 | 1.3 |
| Design Point | ||
|---|---|---|
| DP1: Nominal cruise | target: 10% nadir: 200% | target: 10% nadir: 200% |
| DP2: Low-altitude climb | target: 5% nadir: 200% | target: 5% nadir: 200% |
| DP3: High-altitude cruise | target: 5% nadir: 200% | target: 5% nadir: 200% |
| Transforming Function | Definition |
|---|---|
| Natural logarithm | |
| Square root | |
| Negative inverse square root | |
| Negative inverse | |
| Cube root |
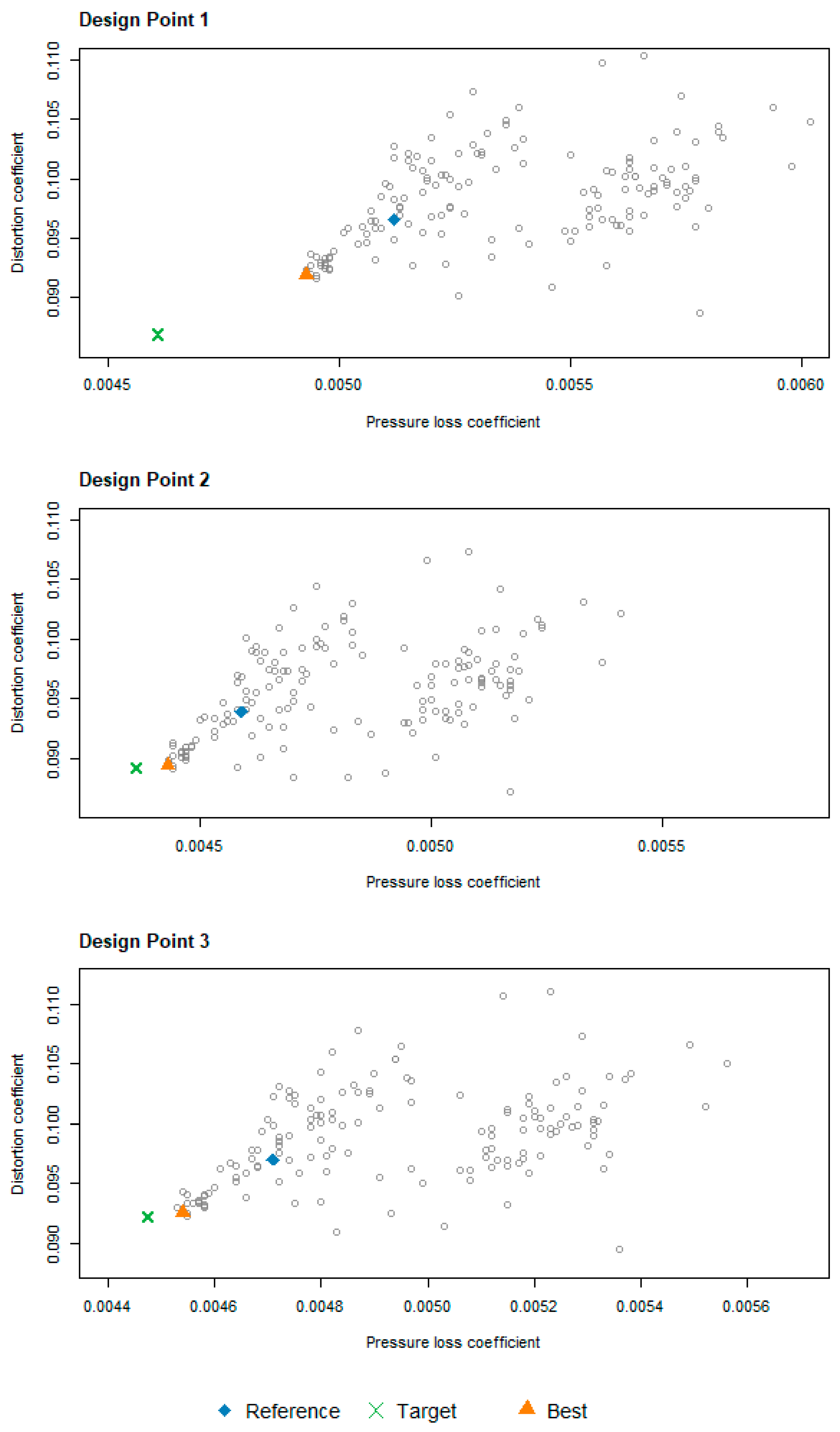
| Reference | Optimized Solution | |||||
|---|---|---|---|---|---|---|
| Design Point | Absolute | Relative | Absolute | Relative | ||
| DP1: Nominal cruise | 0.00512 | 0.09640 | 0.00493 | −3.71% | 0.09190 | −4.67% |
| DP2: Low-altitude climb | 0.00459 | 0.09369 | 0.00443 | −3.49% | 0.08943 | −4.55% |
| DP3: High-altitude cruise | 0.00471 | 0.09679 | 0.00454 | −3.61% | 0.09252 | −4.41% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drężek, P.S.; Kubacki, S.; Żółtak, J. Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem. Aerospace 2023, 10, 266. https://doi.org/10.3390/aerospace10030266
Drężek PS, Kubacki S, Żółtak J. Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem. Aerospace. 2023; 10(3):266. https://doi.org/10.3390/aerospace10030266
Chicago/Turabian StyleDrężek, Przemysław S., Sławomir Kubacki, and Jerzy Żółtak. 2023. "Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem" Aerospace 10, no. 3: 266. https://doi.org/10.3390/aerospace10030266
APA StyleDrężek, P. S., Kubacki, S., & Żółtak, J. (2023). Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem. Aerospace, 10(3), 266. https://doi.org/10.3390/aerospace10030266