
Multi-Objective 3D Airspace Sectorization Problem Using NSGA-II with Prior Knowledge and External Archive


Abstract
1. Introduction
- (1)
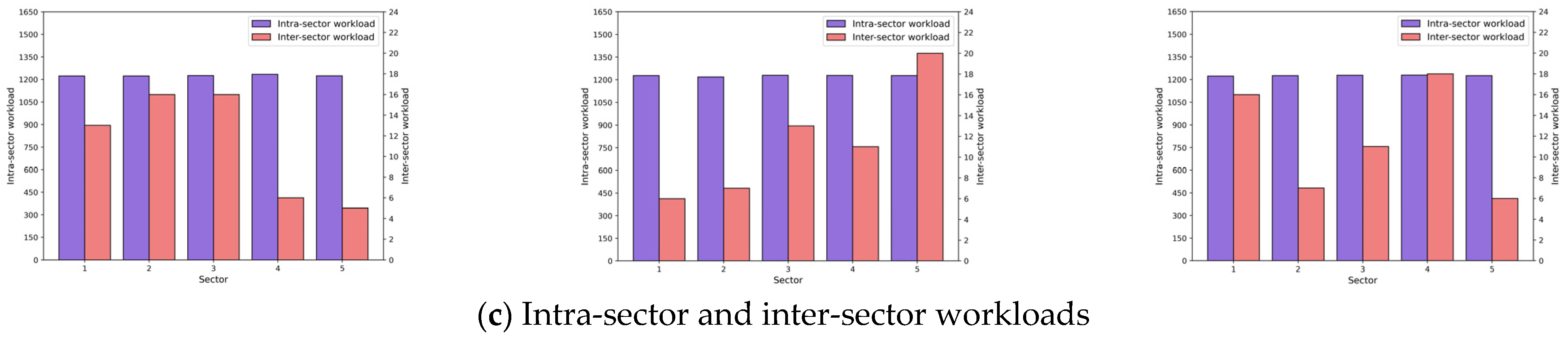
- Under the realistic constraints of operation and safety, a multi-objective framework is proposed to optimize 3D airspace sectorization in terms of intra-sector workload balance and the minimum total inter-sector workload.
- (2)
- To improve solution diversity and model efficiency, an initial population strategy with prior knowledge and an external archive mechanism are introduced into NSGA-II.
- (3)
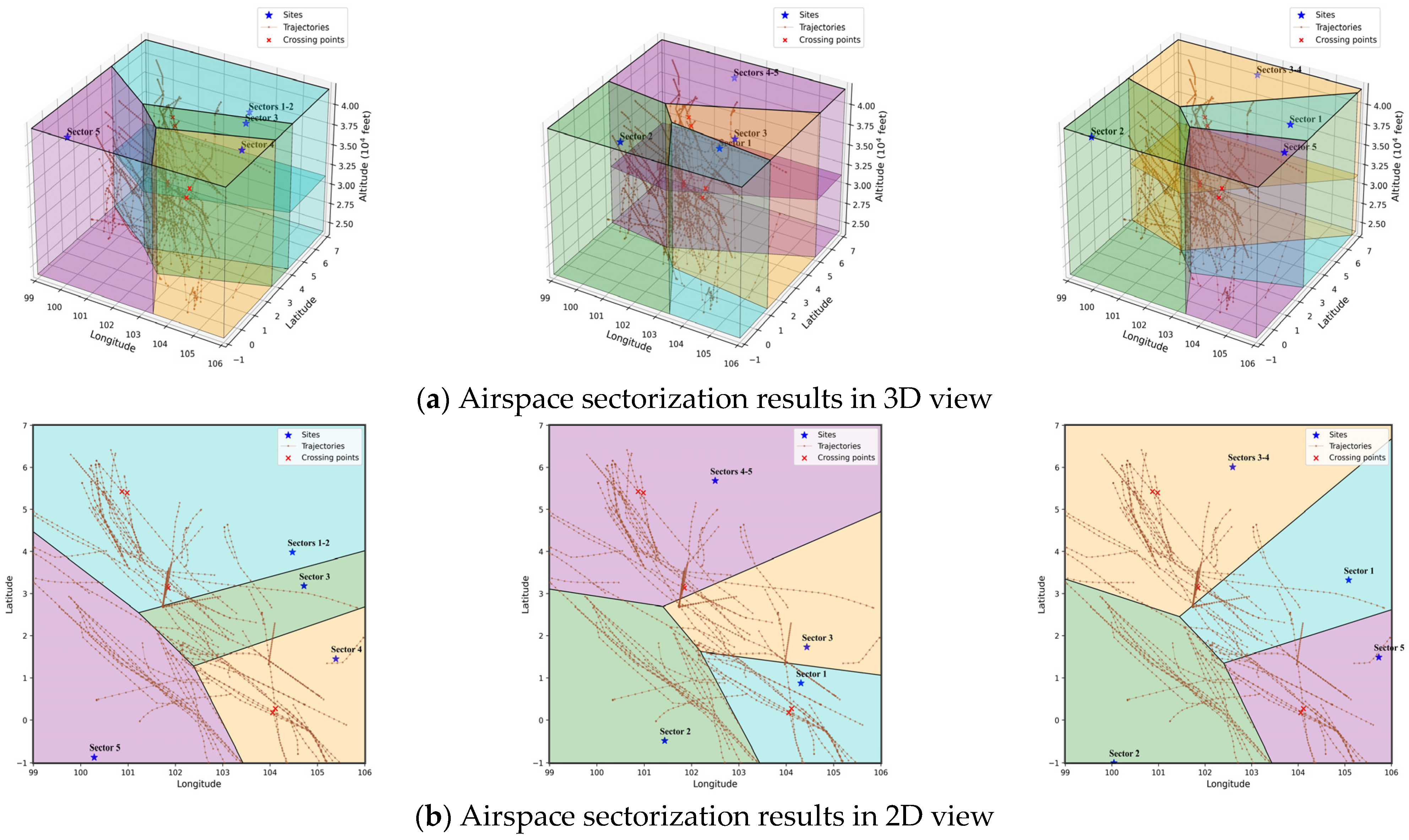
- An in-depth experimental analysis of actual operational data in the Singapore regional airspace is carried out from qualitative and quantitative perspectives, and the effectiveness of the airspace sectorization scheme is confirmed.
2. Related Works
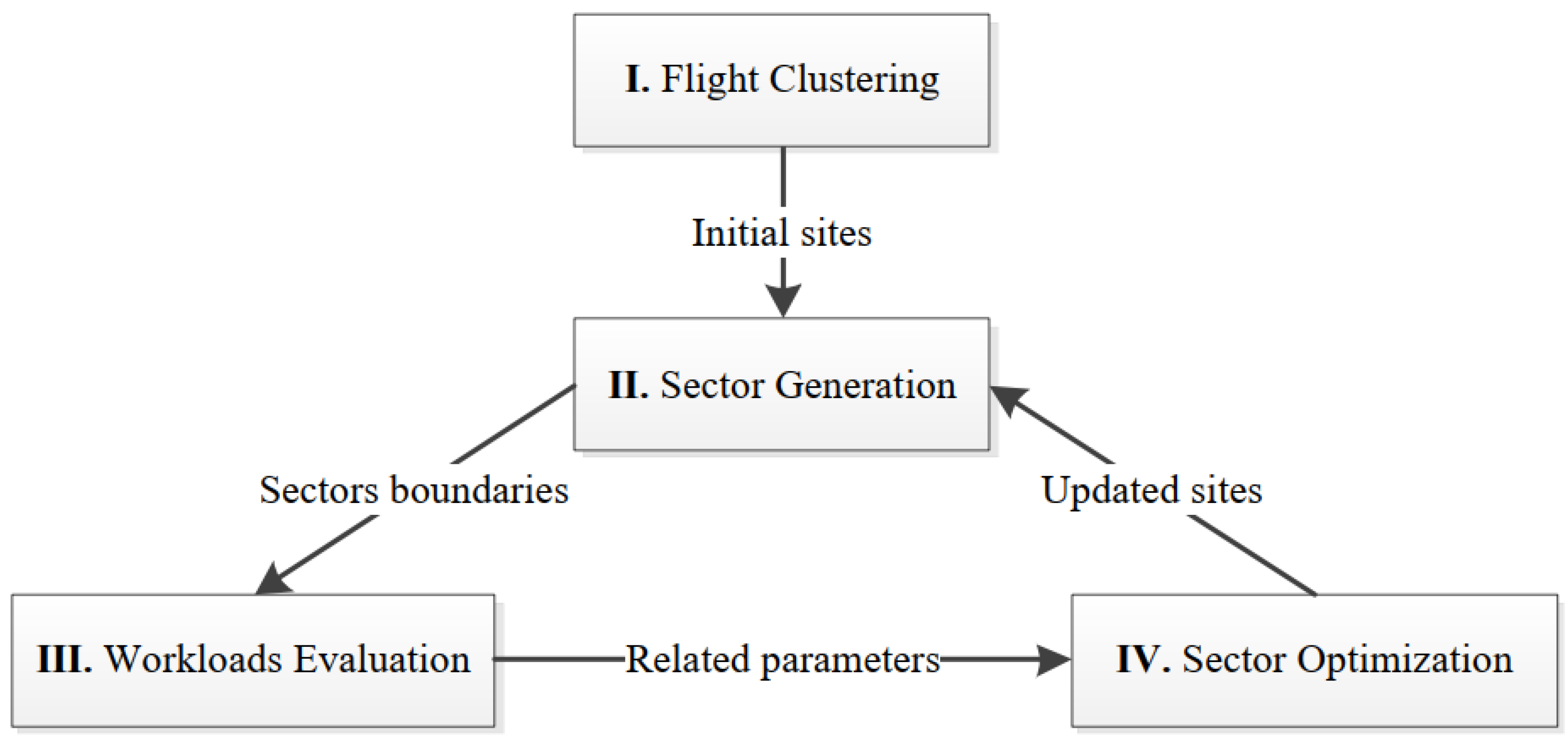
3. Multi-Objective Framework for 3D Airspace Sectorization
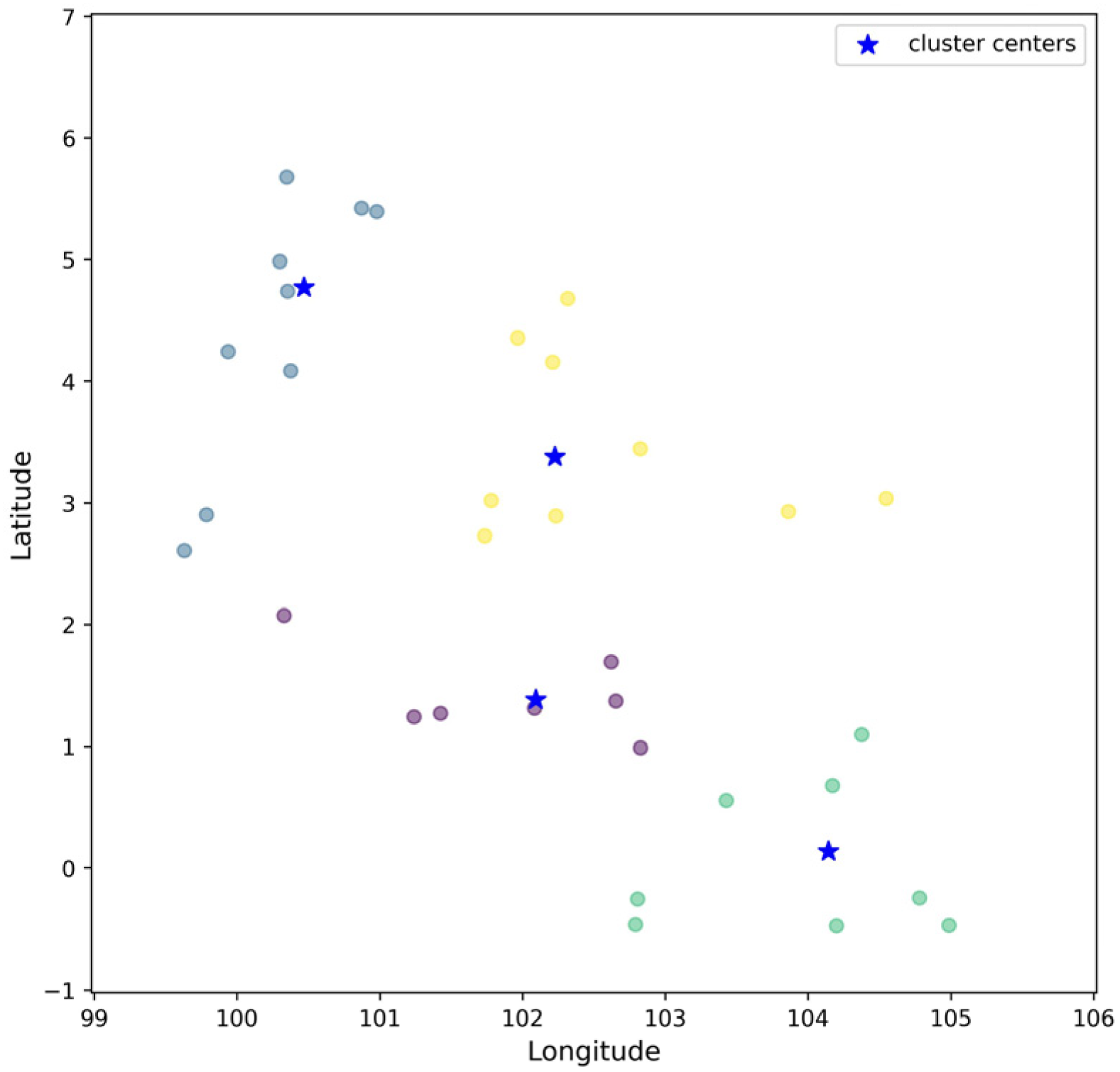
3.1. Flight Clustering as Prior Knowledge
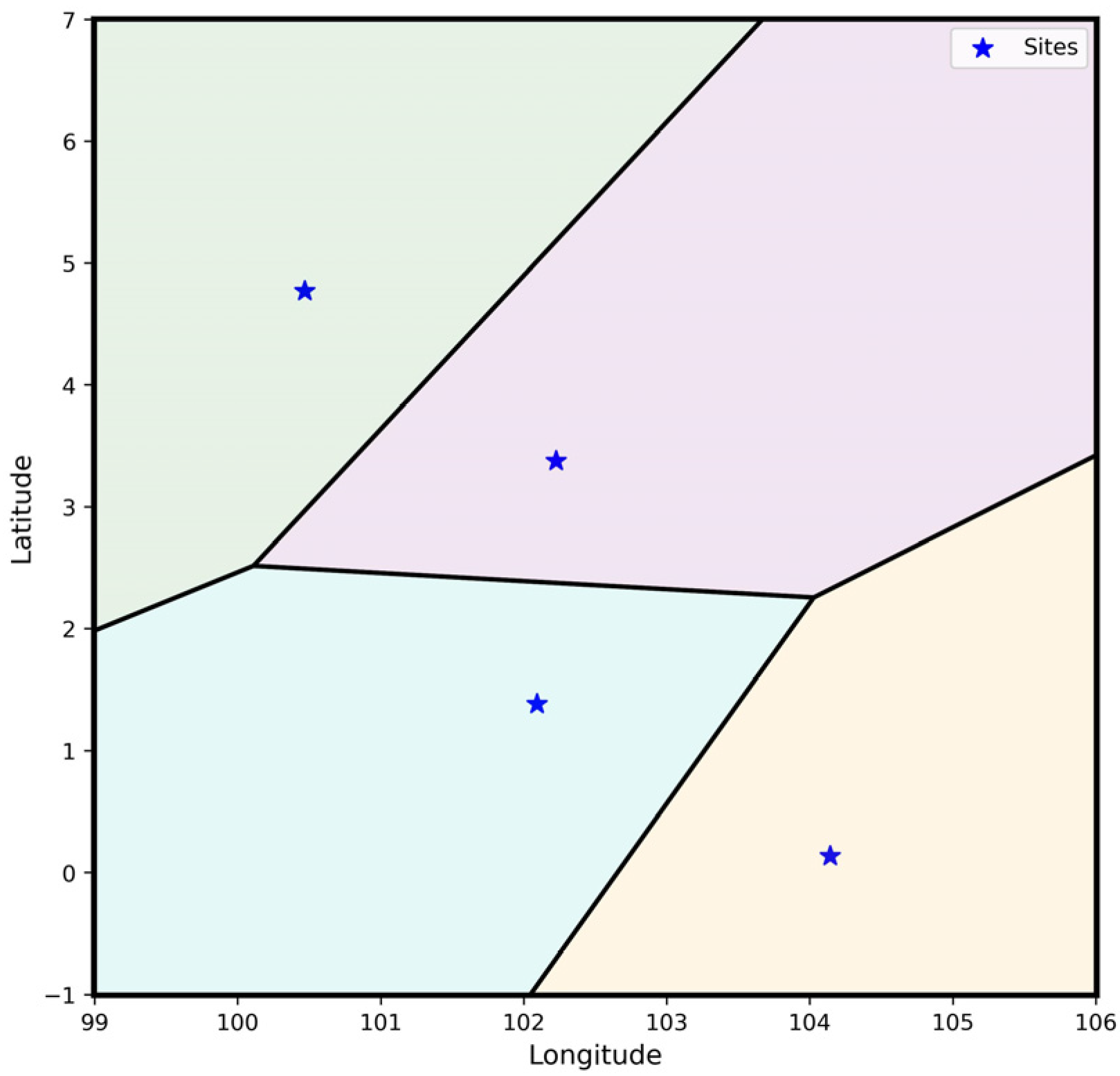
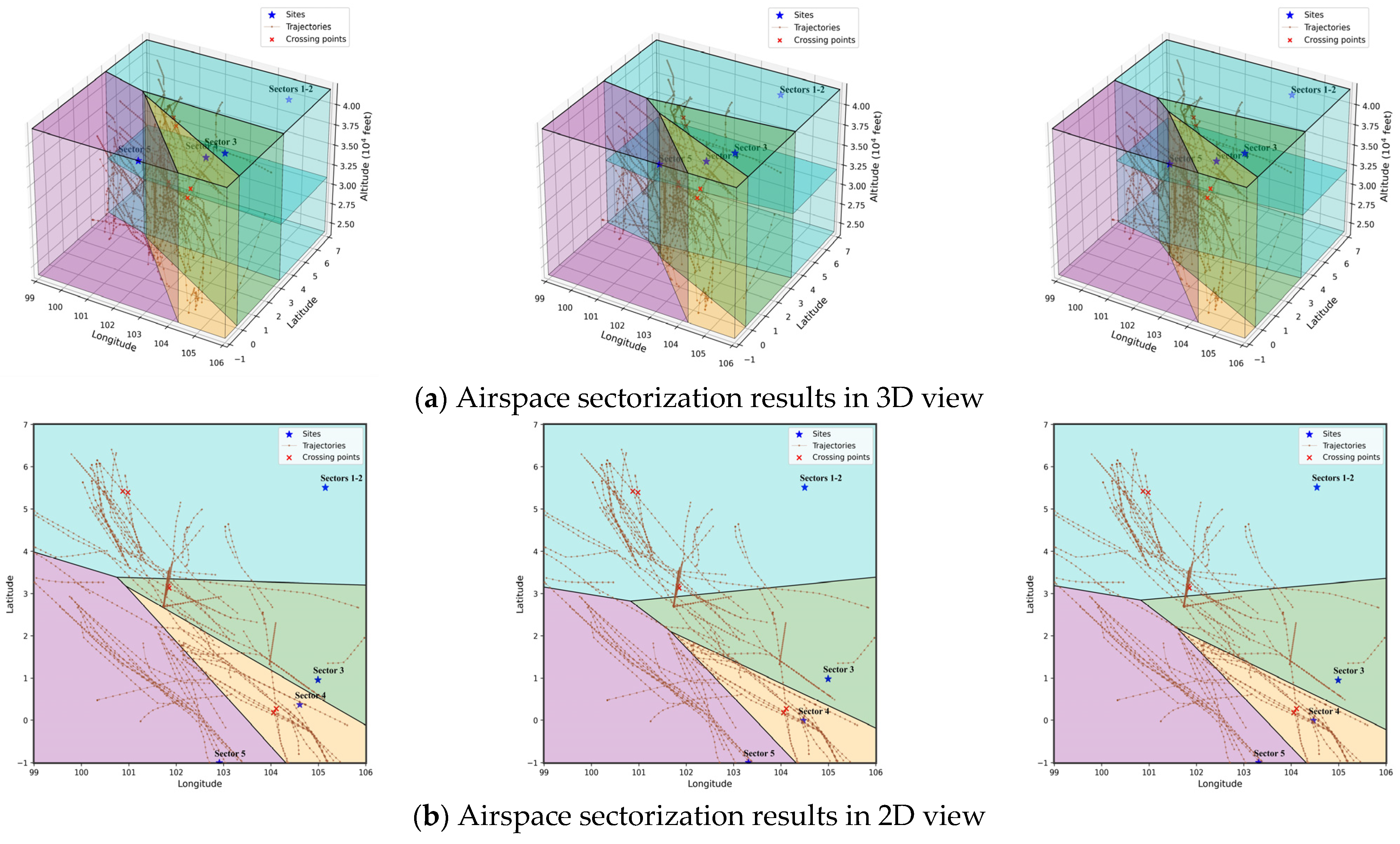
3.2. Sector Generation Based on Voronoi Diagrams
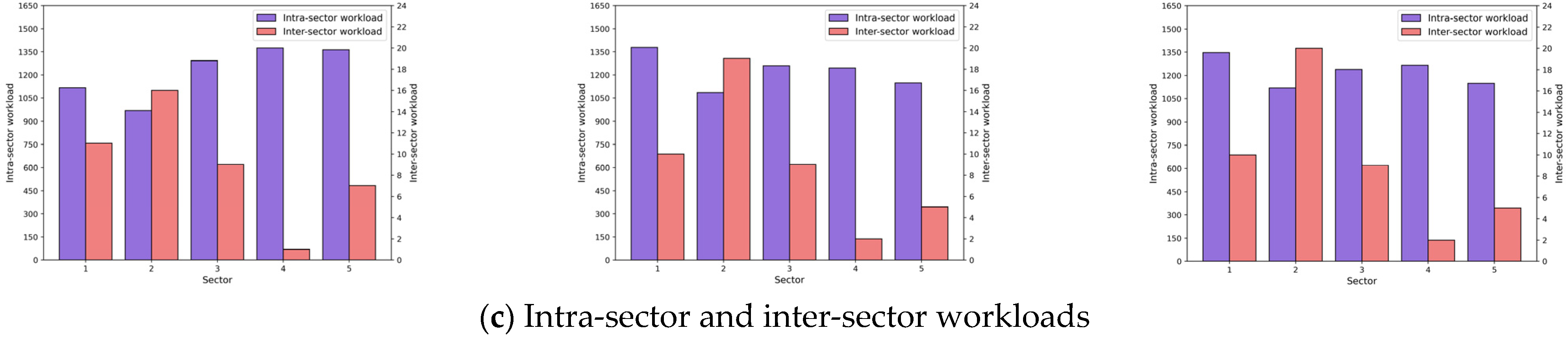
3.3. Workloads Evaluation Using Dynamic Density
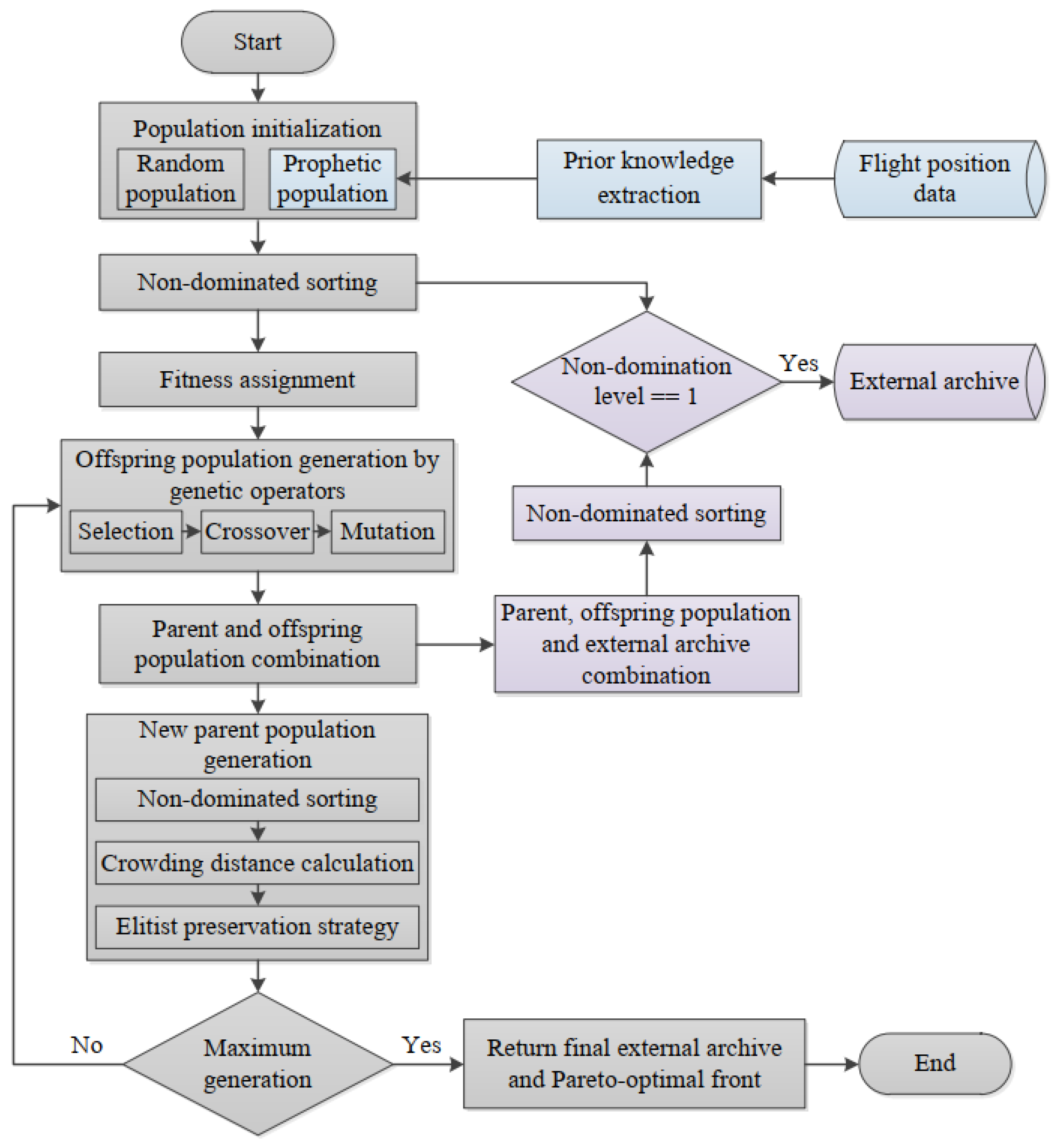
3.4. Sector Optimization Based on NSGA-II with Advanced Strategy and Mechanism
3.4.1. Problem Definitions: Objectives and Constraints
3.4.2. Algorithm Designs: NSGA-II with Prior Knowledge and External Archive
4. Empirical Analysis: A Case Study of Singapore Regional Airspace
4.1. Experimental Setup
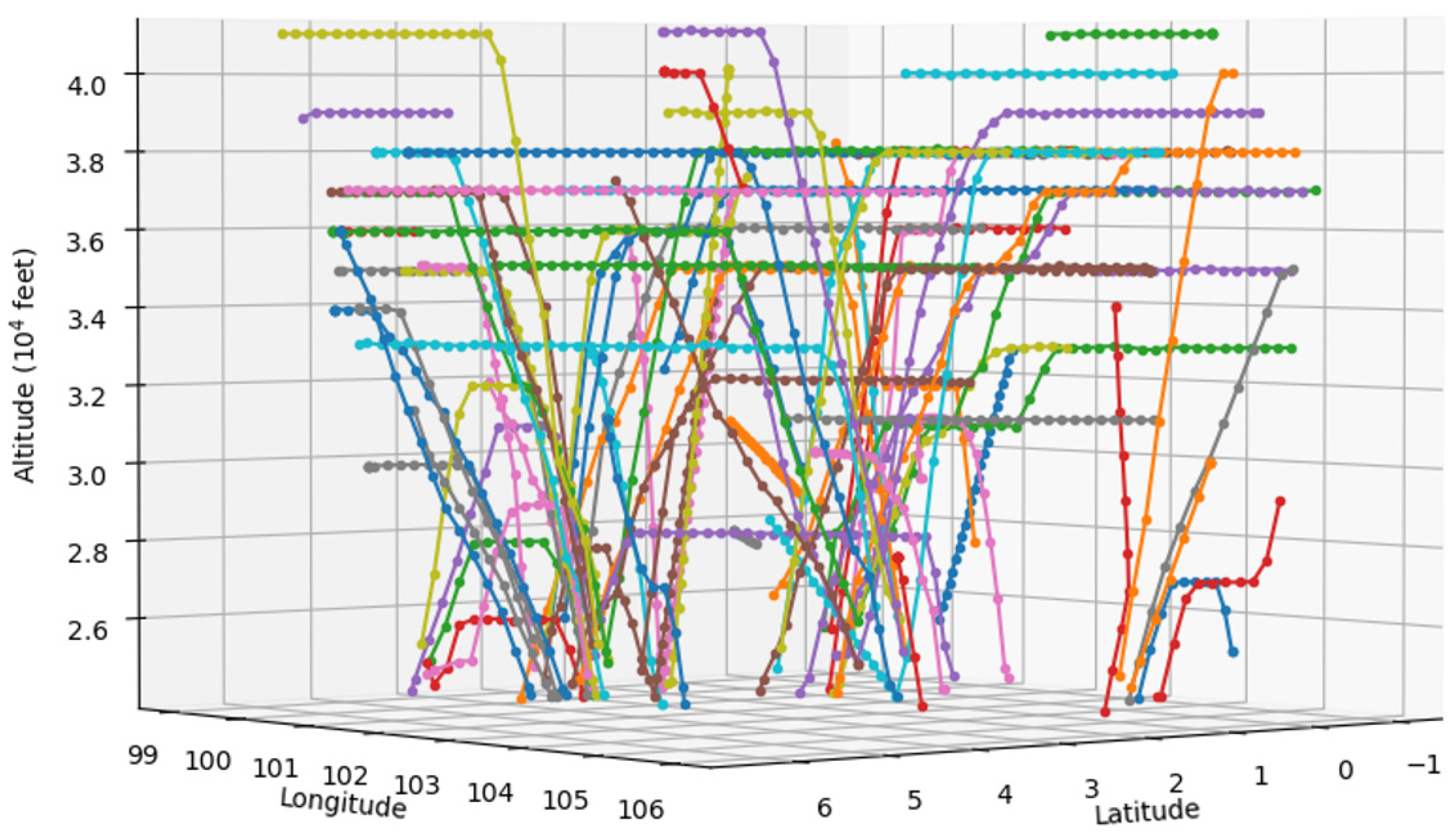
4.1.1. Data Preparation
4.1.2. Implementation Details
4.2. Results and Discussions
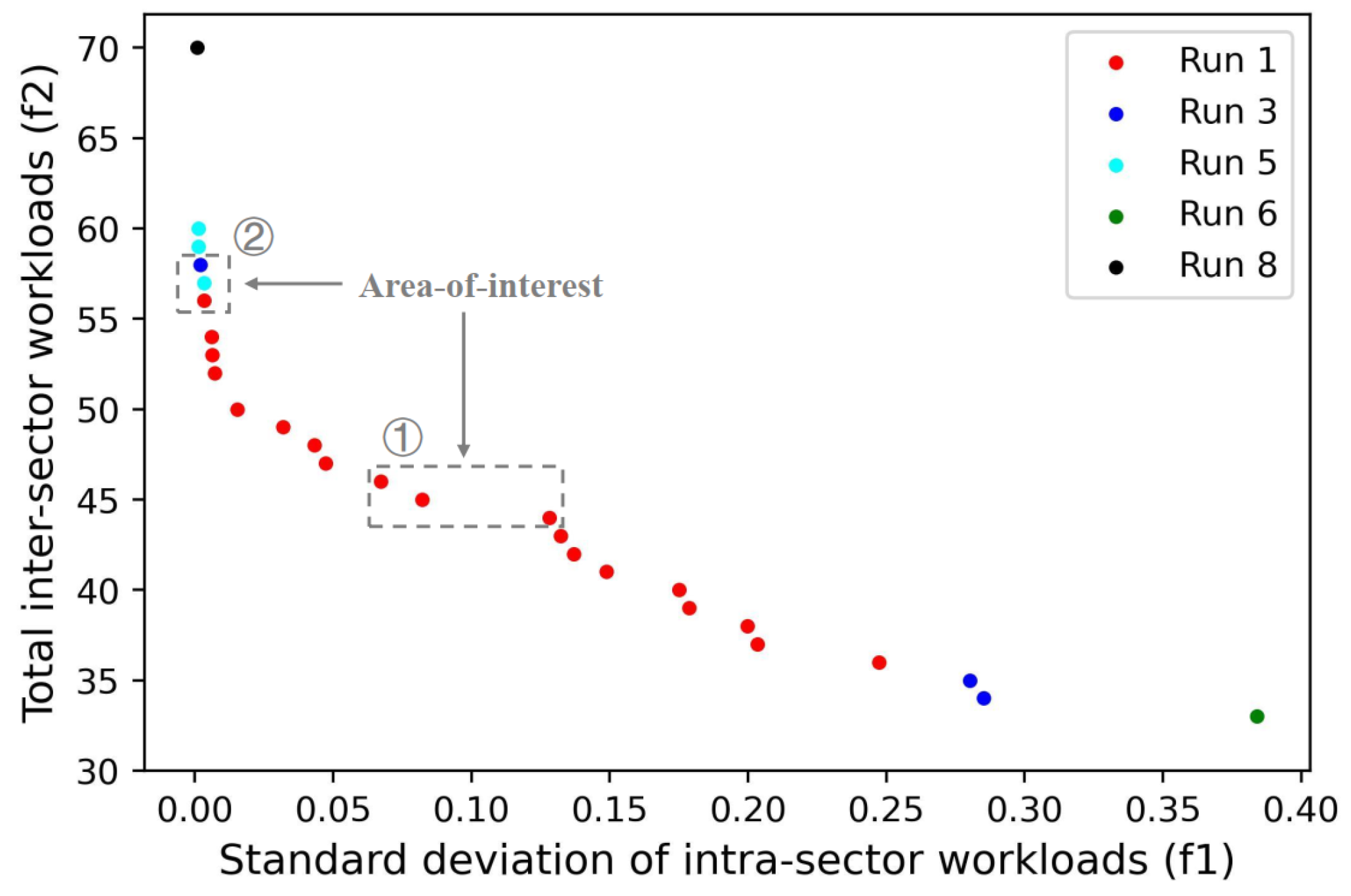
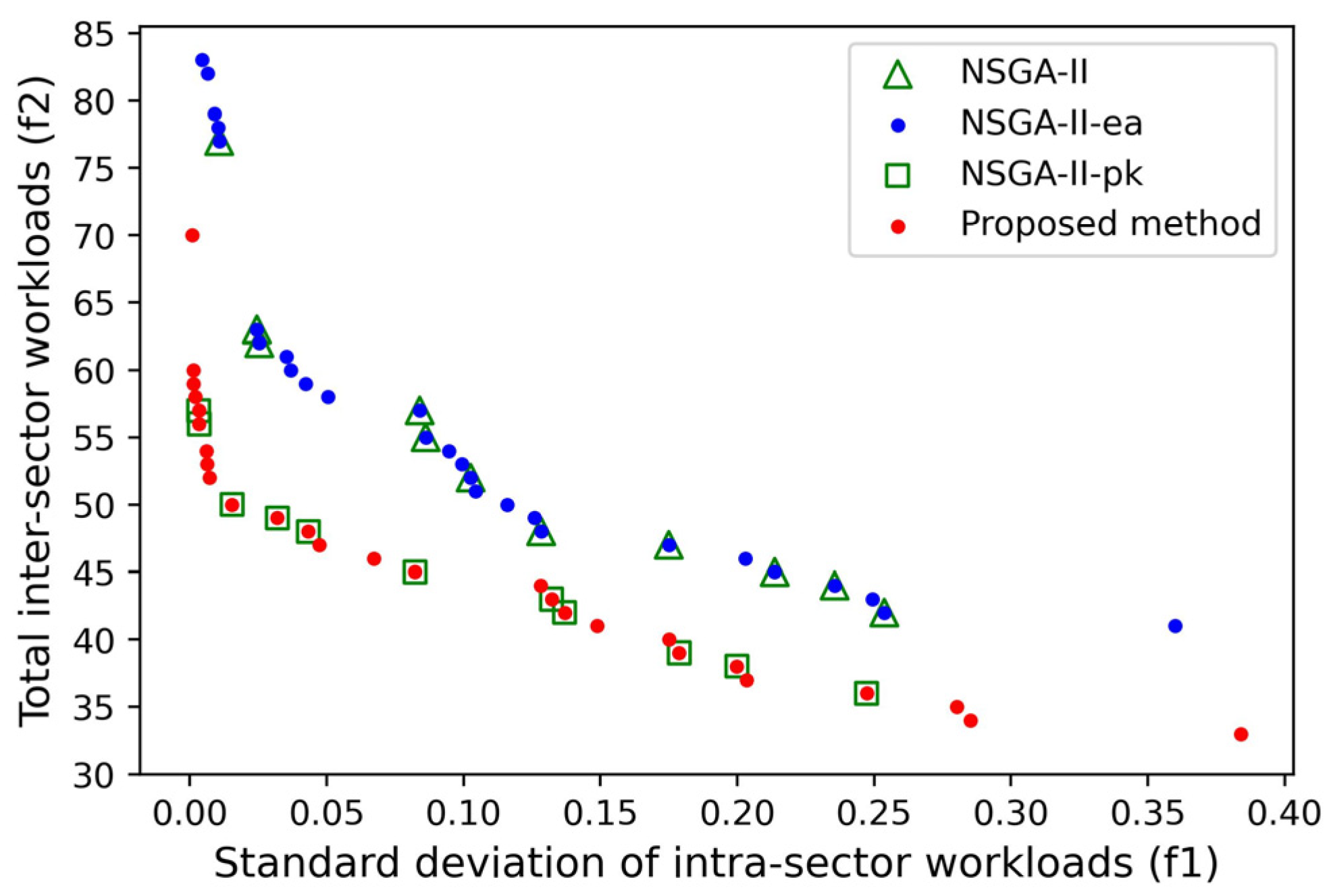
4.2.1. Analysis of the Pareto Front
4.2.2. Performance Comparison of Different Algorithms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gianazza, D. Forecasting workload and airspace configuration with neural networks and tree search methods. Artif. Intell. 2010, 174, 530–549. [Google Scholar] [CrossRef]
- Flener, P.; Pearson, J. Automatic airspace sectorisation: A survey. arXiv 2013, arXiv:1311.0653. [Google Scholar]
- Delahaye, D.; Schoenauer, M.; Alliot, J.M. Airspace sectoring by evolutionary computation. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 218–223. [Google Scholar]
- Yin, C.W.S.; Venugopalan, T.K.; Suresh, S. A multi-objective approach for 3D airspace sectorization: A study on Singapore regional airspace. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–8. [Google Scholar]
- Laudeman, I.V.; Shelden, S.G.; Branstrom, R.; Brasil, C.L. Dynamic Density: An Air Traffic Management Metric; NASA: Washington, DC, USA, 1998. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan TA, M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Sergeeva, M.; Delahaye, D.; Mancel, C. 3D airspace sector design by genetic algorithm. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 499–506. [Google Scholar]
- Delahaye, D.; Puechmorel, S. 3D airspace design by evolutionary computation. In Proceedings of the 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, St. Paul, MN, USA, 26–30 October 2008; pp. 3. B. 6-1–3. B. 6-13. [Google Scholar]
- Tang, J.; Alam, S.; Lokan, C.; Abbass, H.A. A multi-objective approach for dynamic airspace sectorization using agent based and geometric models. Transp. Res. Part C: Emerg. Technol. 2012, 21, 89–121. [Google Scholar] [CrossRef]
- Kulkarni, S.; Ganesan, R.; Sherry, L. Static sectorization approach to dynamic airspace configuration using approximate dynamic programming. In Proceedings of the 2011 Integrated Communications, Navigation, and Surveillance Conference Proceedings, Herndon, VA, USA, 10–12 May 2011; pp. J2-1–J2-9. [Google Scholar]
- Leiden, K.; Peters, S.; Quesada, S. Flight level-based dynamic airspace configuration. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations Conference (ATIO) and Aircraft Noise and Emissions Reduction Symposium (ANERS), Hilton Head, SC, USA, 21–23 September 2009; p. 7104. [Google Scholar]
- Conker, R.S.; Moch-Mooney, D.A.; Niedringhaus, W.P.; Simmons, B.T. New process for “clean sheet” airspace design and evaluation. In Proceedings of the 7th US/Europe ATM Seminar, Barcelona, Spain, 2–5 July 2007; pp. 1–10. [Google Scholar]
- Fortune, S. Voronoi diagrams and Delaunay triangulations. Comput. Euclidean Geom. 1995, 225–265. [Google Scholar]
- Yousefi, A.; Donohue, G. Temporal and spatial distribution of airspace complexity for air traffic controller workload-based sectorization. In Proceedings of the AIAA 4th aviation technology, integration and operations (ATIO) forum, Chicago, IL, USA, 20–22 September 2004; p. 6455. [Google Scholar]
- Trandac, H.; Baptiste, P.; Duong, V. Airspace sectorization with constraints. RAIRO-Oper. Res. 2005, 39, 105–122. [Google Scholar] [CrossRef]
- Bichot, C.E.; Durand, N. A tool to design functional airspace blocks. In Proceedings of the 7th USA/Europe Seminar on Air Traffic Management Research and Development, Barcelona, Spain, 2–5 July 2007. [Google Scholar]
- Sabhnani, G.; Yousefi, A.; Mitchell JS, B. Flow conforming operational airspace sector design. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010; p. 9377. [Google Scholar]
- Chen, Y.; Bi, H.; Zhang, D.; Song, Z. Dynamic airspace sectorization via improved genetic algorithm. J. Mod. Transp. 2013, 21, 117–124. [Google Scholar] [CrossRef]
- Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace sectorisation for flight-centric operations. Transp. Res. Part C Emerg. Technol. 2018, 95, 460–480. [Google Scholar] [CrossRef]
- Zhang, W.; Hu, M.; Du, J. An end-to-end framework for flight trajectory data analysis based on deep autoencoder network. Aerosp. Sci. Technol. 2022, 127, 107726. [Google Scholar] [CrossRef]
- Miyamoto, S.; Ichihashi, H.; Honda, K.; Ichihashi, H. Algorithms for Fuzzy Clustering; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Xue, M. Airspace sector redesign based on Voronoi diagrams. J. Aerosp. Comput. Inf. Commun. 2009, 6, 624–634. [Google Scholar] [CrossRef]
- Jazzbin, E. Geatpy: The Genetic and Evolutionary Algorithm Toolbox with High Performance in Python. 2020. Available online: http://www.geatpy.com/ (accessed on 10 December 2022).
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research. In Proceedings of the IPSN-14 Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 83–94. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factors of Dynamic Density | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| HC | SC | AC | MD5 | MD10 | CP25 | CP40 | CP70 | TD | |
| Weight | 2.40 | 2.45 | 2.94 | 2.45 | 1.83 | 4.00 | 3.00 | 2.11 | 1.00 |
| Methods | Evaluation Indicators | ||
|---|---|---|---|
| NS | SP | HV | |
| NSGA-II | 11 | 0.12 | 0.51 |
| NSGA-II-ea | 27 | 0.06 | 0.52 |
| NSGA-II-pk | 11 | 0.09 | 0.59 |
| Proposed method | 27 | 0.06 | 0.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Hu, M.; Yin, J.; Li, H.; Du, J. Multi-Objective 3D Airspace Sectorization Problem Using NSGA-II with Prior Knowledge and External Archive. Aerospace 2023, 10, 216. https://doi.org/10.3390/aerospace10030216
Zhang W, Hu M, Yin J, Li H, Du J. Multi-Objective 3D Airspace Sectorization Problem Using NSGA-II with Prior Knowledge and External Archive. Aerospace. 2023; 10(3):216. https://doi.org/10.3390/aerospace10030216
Chicago/Turabian StyleZhang, Weining, Minghua Hu, Jianan Yin, Haobin Li, and Jinghan Du. 2023. "Multi-Objective 3D Airspace Sectorization Problem Using NSGA-II with Prior Knowledge and External Archive" Aerospace 10, no. 3: 216. https://doi.org/10.3390/aerospace10030216
APA StyleZhang, W., Hu, M., Yin, J., Li, H., & Du, J. (2023). Multi-Objective 3D Airspace Sectorization Problem Using NSGA-II with Prior Knowledge and External Archive. Aerospace, 10(3), 216. https://doi.org/10.3390/aerospace10030216