
High-Performance Attitude Control Design of Supersonic Tailless Aircraft: A Cascaded Disturbance Rejection Approach

 ,
, 
 ,
,  and
and
Abstract
1. Introduction
1.1. Motivation
1.2. Related Works
1.3. Contribution
2. Analysis of Mission Characteristics and Flight Quality
2.1. Overview of Flight Mission
- (1)
- The launching separation phase: It mainly completes the safe separation of the ICE aircraft from the carrier. After safe separation, the ICE aircraft will slide in a stable attitude. When the vertical distance between the carrier and ICE aircraft reaches a safe value, the first phase ends.
- (2)
- The powered flight phase: The aircraft changes from a downward gliding mode to a climbing mode. Meanwhile, the embedded booster rocket is ignited. In addition, the ICE aircraft will accelerate to a supersonic airspeed. When the booster is burned out, the powered flight phase ends.
- (3)
- The unpowered gliding phase: The ICE aircraft manages its energy and adjusts its flight path so that it can successfully enter the circle for final parachute landing.
- (4)
- The recovery phase: The aircraft further dissipates energy and adjusts to an appropriate altitude and attitude to open the parachute for landing in a specific window.
- S1
- The first step is the unpowered delivery test. Firstly, the ICE aircraft is carried by carrier with 0.7 Mach to a height of 11 km, then delivered in a scheduled area. Secondly, the ICE aircraft glides at a constant airspeed without power. Thirdly, it makes energy management after entering the energy dissipation circle. Finally, the ICE aircraft will fly out of the dissipation circle to parachute in the landing windown.
- S2
- The second step is ICE aircraft supersonic flight control test. Firstly, the carrier carries aircraft to specific height and delivers it. Secondly, the engine is ignited and the aircraft climbs faster after levelling off. Thirdly, the ICE aircraft enters level deceleration flight stage after reaching scheduled height. After decelerating to a subsonic state, the aircraft makes an unpowered return flight. Finally, it flies out of the dissipation circle to parachute in the landing window for recycling after energy management.
2.2. Flight State Point
- (1)
- There is no lateral maneuver requirement in the supersonic stage.
- (2)
- Limited by the hinge moment of the all-moving tip, the aircraft needs to climb to reach the target airspeed. Moreover, the corresponding deceleration height of horizontal flight is also limited by dynamic pressure.
- (3)
- In order to take the comprehensive changes of airspeed and atmospheric density into account to facilitate the flight control design, the fixed dynamic pressure is adopted in the gliding flight.
- (4)
- After the ICE aircraft guides into the energy circle, the landing window should be guaranteed. The restrictive conditions are determined as follows:
- Original conditions: altitude 11 km, Mach number 0.7 Ma;
- Horizontal flight deceleration conditions: altitude 13 km, maximum flight Mach number 1.4 Ma;
- Terminal conditions: altitude 1.2 km, Mach number 0.3 Ma;
2.3. Aerodynamic Layout
- (a)
- The inner and outer ailerons are utilized to control aircraft pitch motion;
- (b)
- The outer aileron are utilized to control roll motion;
- (c)
- The all-moving tip is utilized to control yaw motion;
- (d)
- The accompanying roll moment generated by the all-moving tip can be compensated by the outer aileron motion.
2.4. Flight Quality Analysis
2.4.1. Longitudinal Stability Analysis
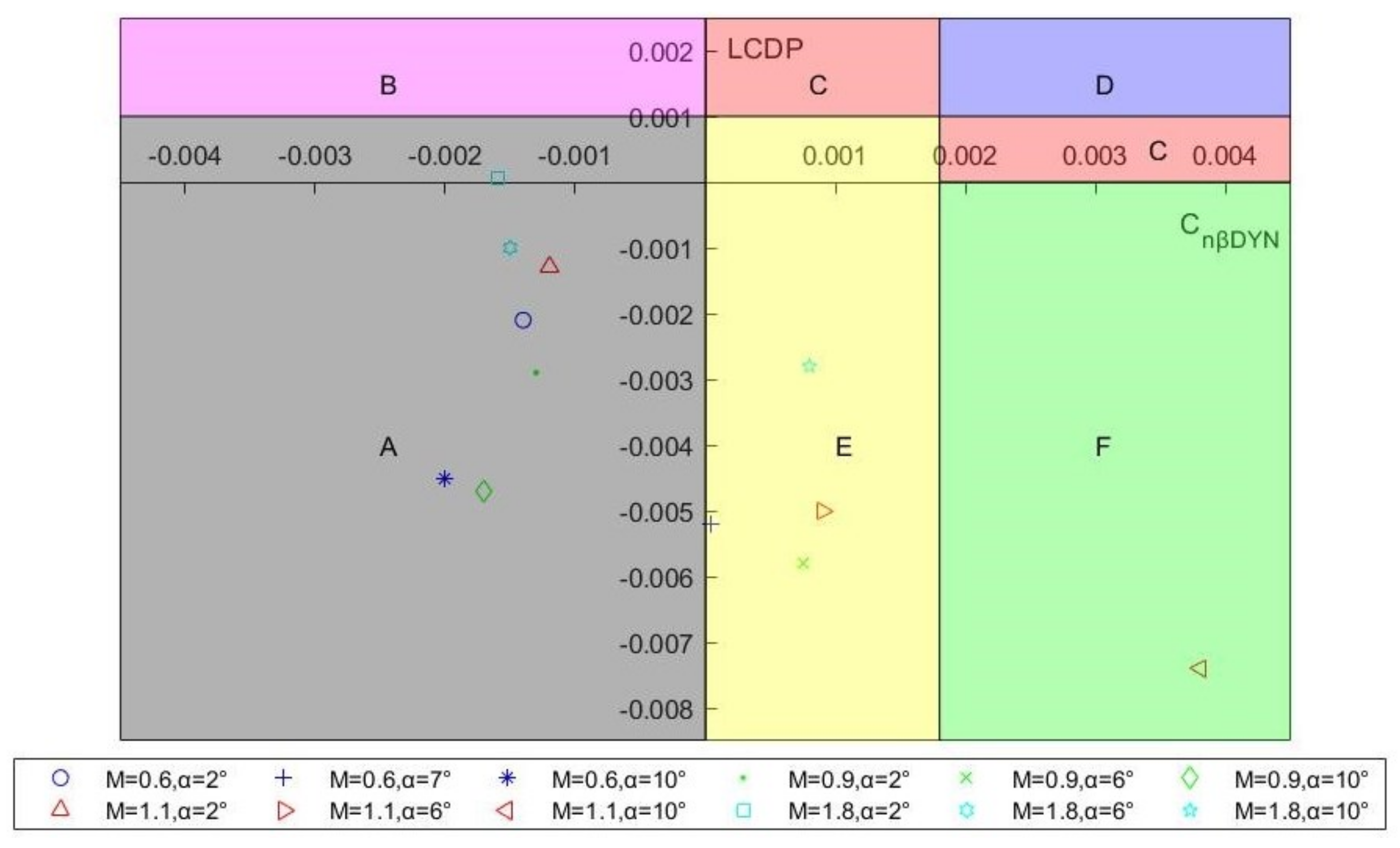
2.4.2. Lateral Stability Analysis
- Derivative of directional static stability ;
- Derivative of lateral static stability ;
- The lateral departure parameter ;
- Lateral control departure parameter ;
- (1)
- At a negative angle of attack, , directional stability is good; At a positive angle of attack, , and it decreases with the increase of angle of attack.
- (2)
- With the increase of Mach number, it decreases continuously and the directional stability is enhanced.
2.4.3. Conclusion of Flight Quality
- The longitudinal stability meets the flight quality requirements;
- The center of gravity varies greatly throughout the mission, which poses a challenge to the control law design;
- The relaxation of directional static stability makes the control law high feedback gain requirements, which poses serious risk of robustness.
3. Attitude Control Design
- In the launching separation phase, the strong aerodynamic coupling between the ICE aircraft and the carrier is difficult to accurately analyze through simulation;
- The flow field in the delivery phase has strong aerodynamic interference, which puts forward high requirements on the disturbance rejection ability of the controller;
- Since the booster is buried inside the ICE aircraft, there exist different mass characteristics at the same altitude and Mach number in the flight profile; the designed control law should be robust enough to cope with the unique mass characteristics changes;
- Booster combustion makes the vehicle’s center of gravity move forward. Meanwhile, the subsonic transjump supersonic process makes the aerodynamic focus move back rapidly, resulting in the longitudinal strong static instability rapidly into strong static stability. As a result, the control law needs to have attitude tracking ability with strong robustness and disturbance resistance;
- The thrust line of the booster has position and angle error, and there is a large instantaneous moment at the moment of ignition, which puts forward higher requirements for the anti-disturbance ability of attitude control.
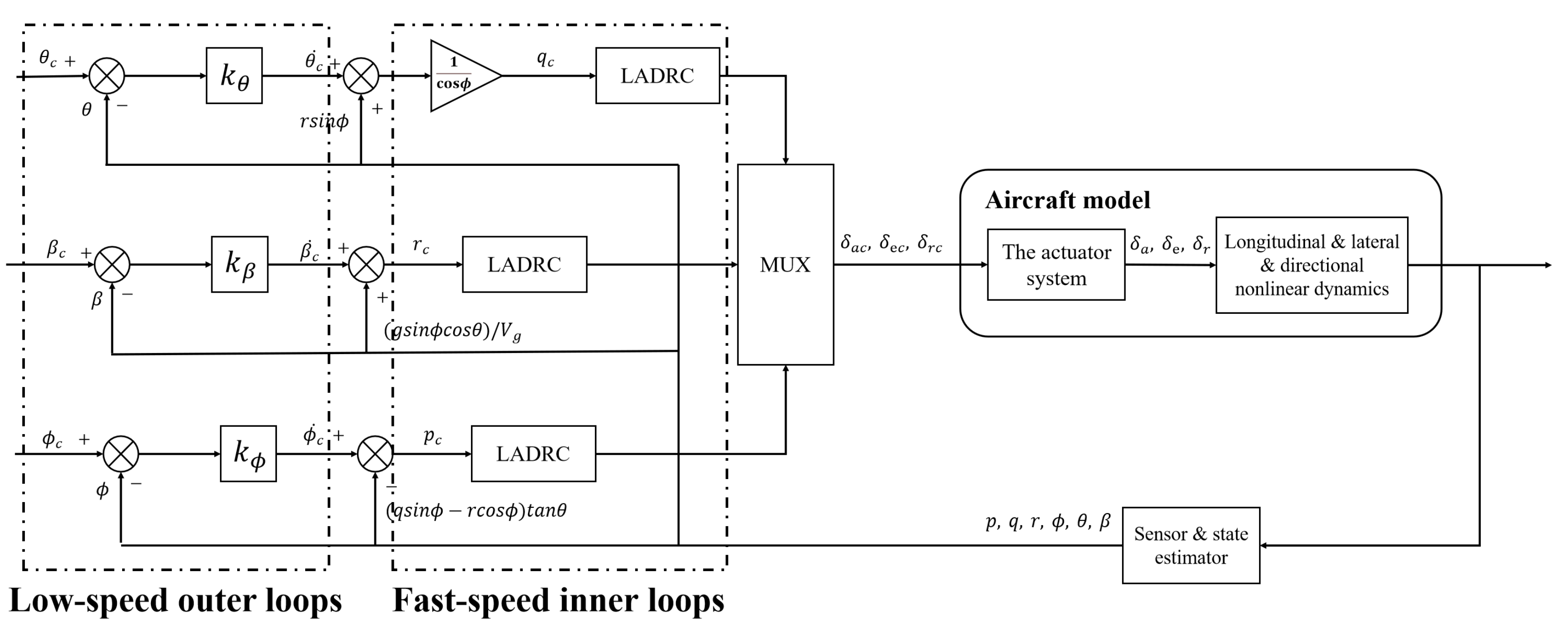
3.1. Cascaded ADRC Attitude Control
3.1.1. Pitch Attitude Control
3.1.2. Roll Attitude Control
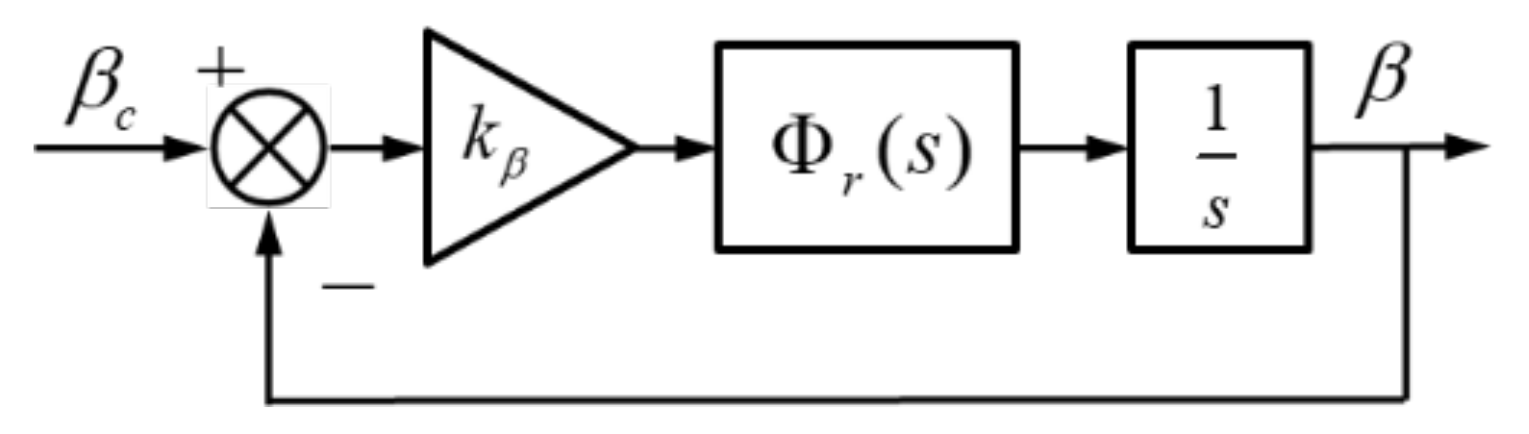
3.1.3. Sideslip Angle Control
3.1.4. The Design of Soft and Hard Cross-Connection
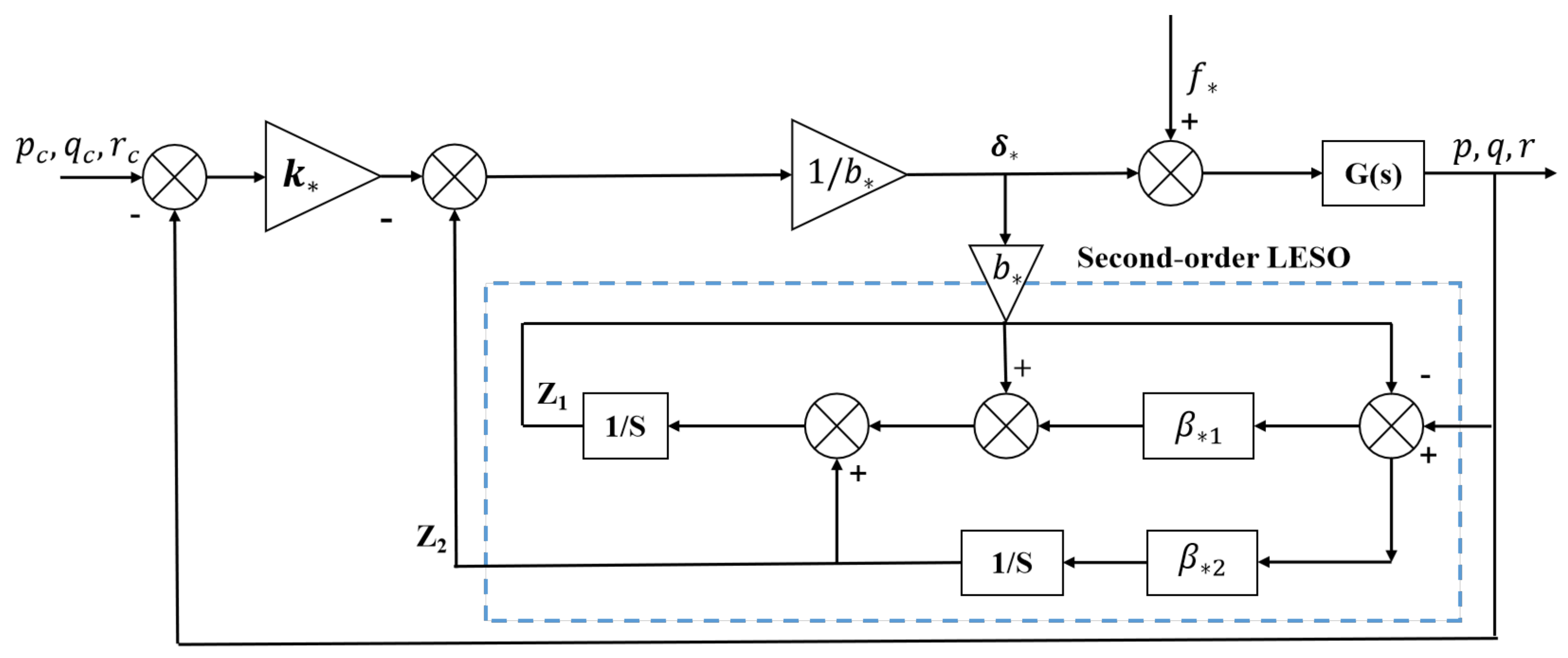
3.2. Linear Extended State Observer
3.2.1. Proof of LESO Convergence
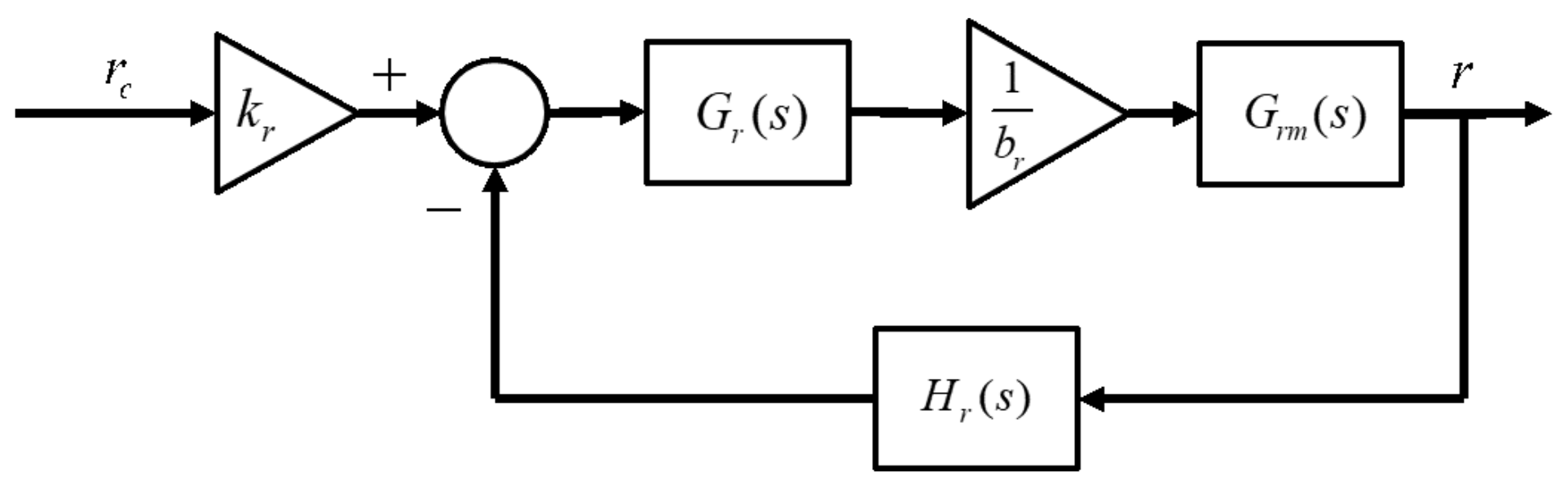
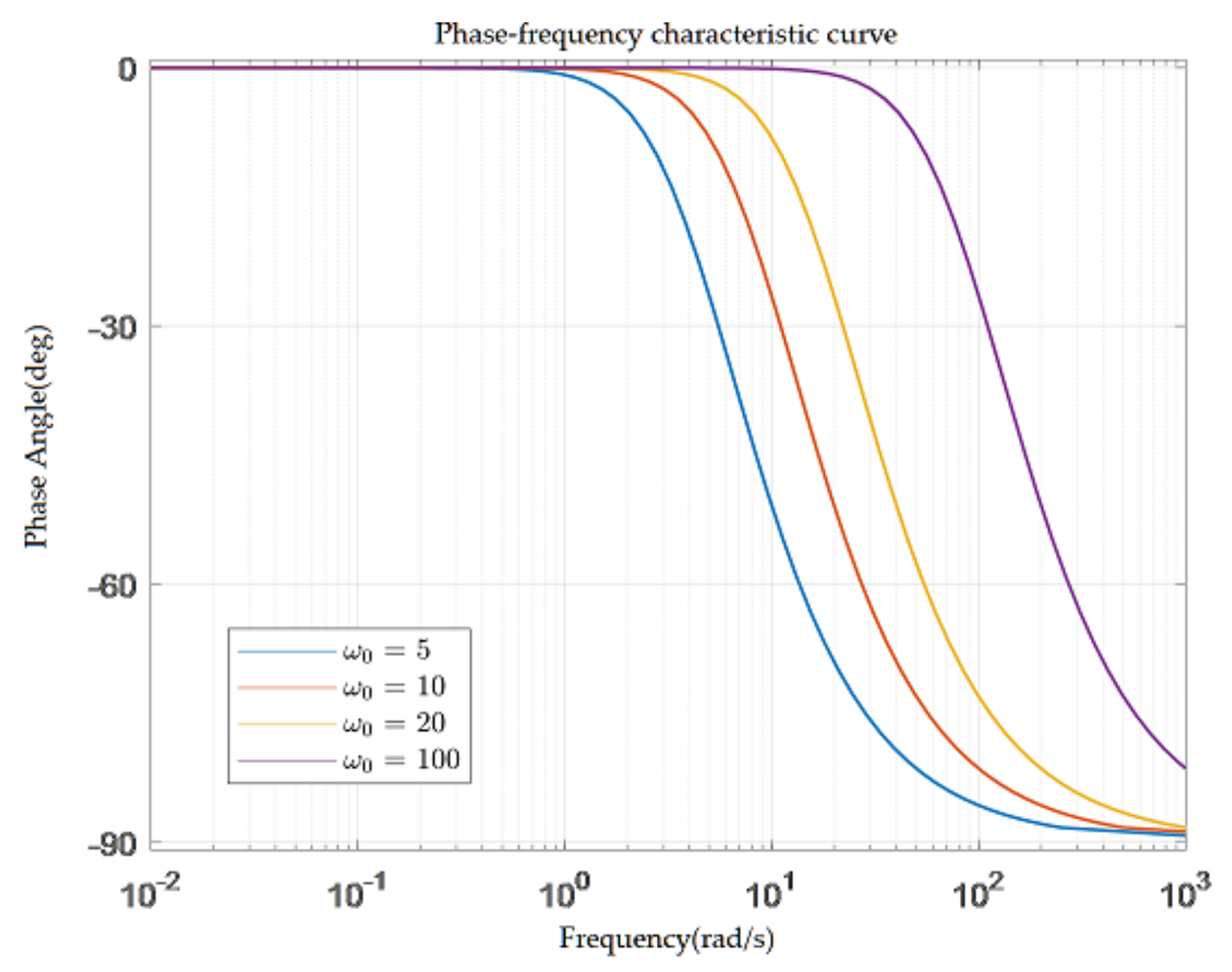
3.2.2. The Setting of LESO Bandwidth
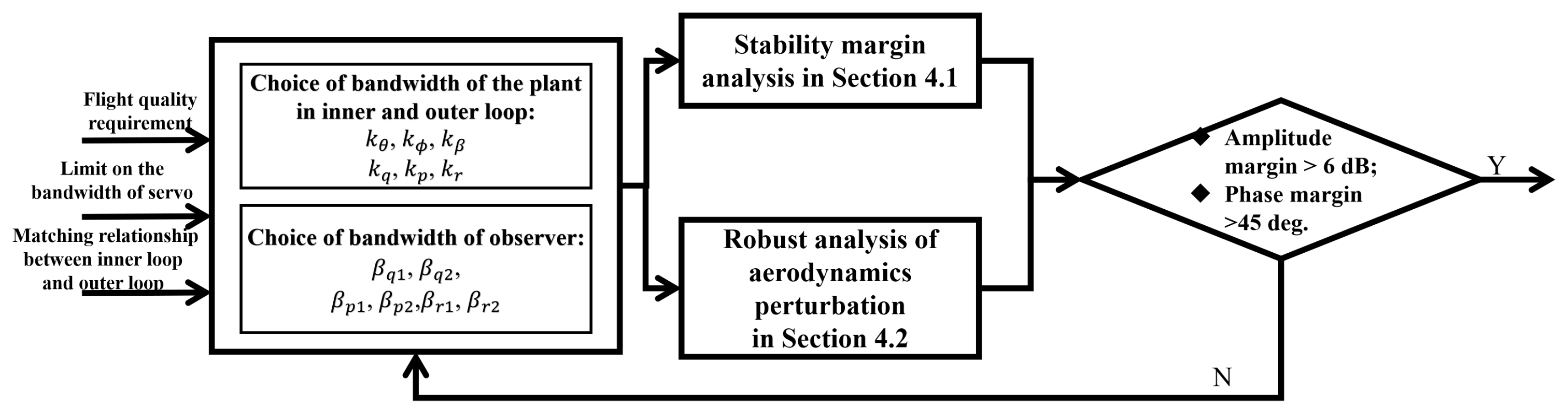
3.2.3. Control Law Tuning Rule
- Step 1:
- According to the timing separation principle [14], select as 1/5–1/3 of the effector bandwidth. Select as 1/5 to 1/3 of ;
- Step 2:
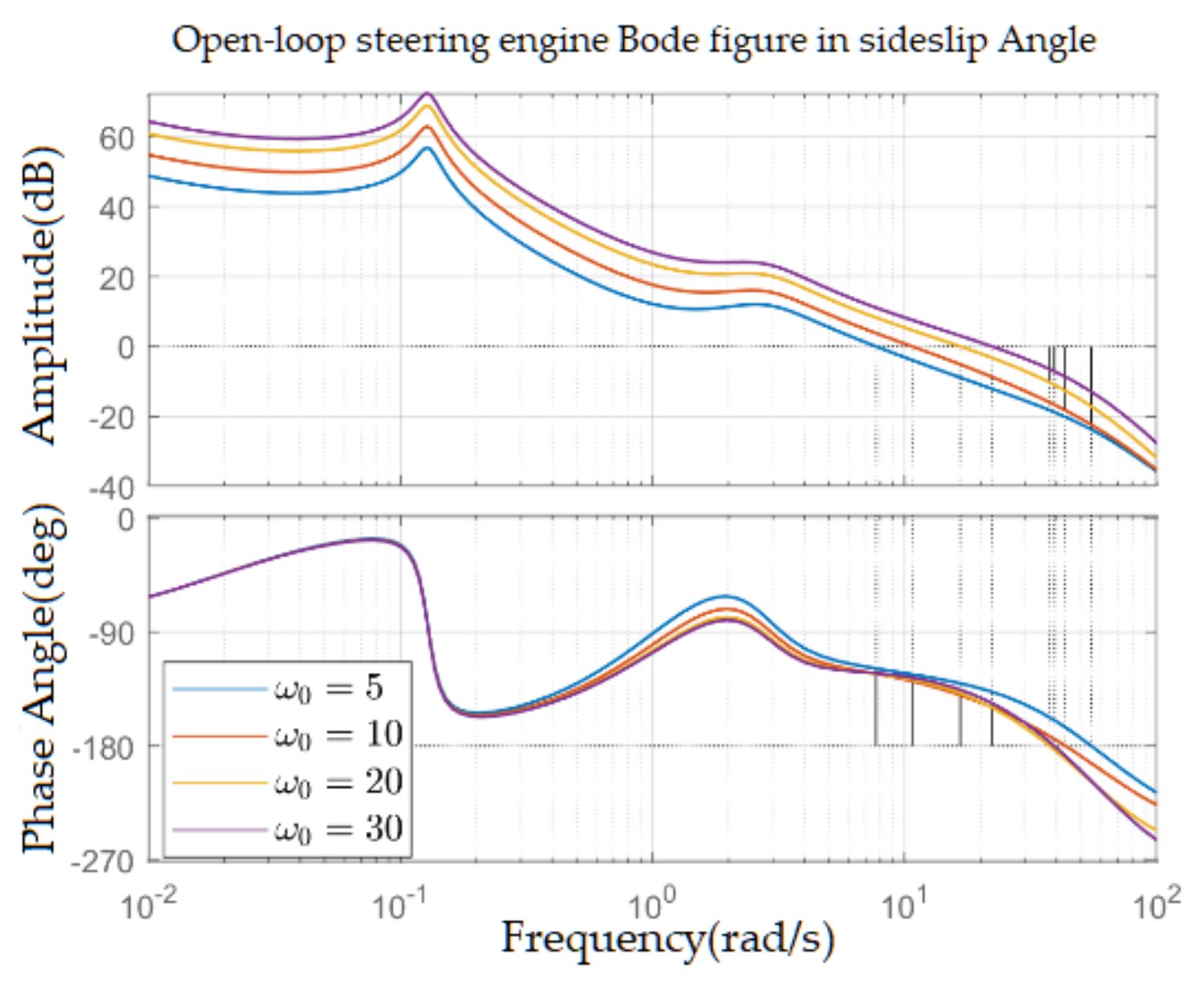
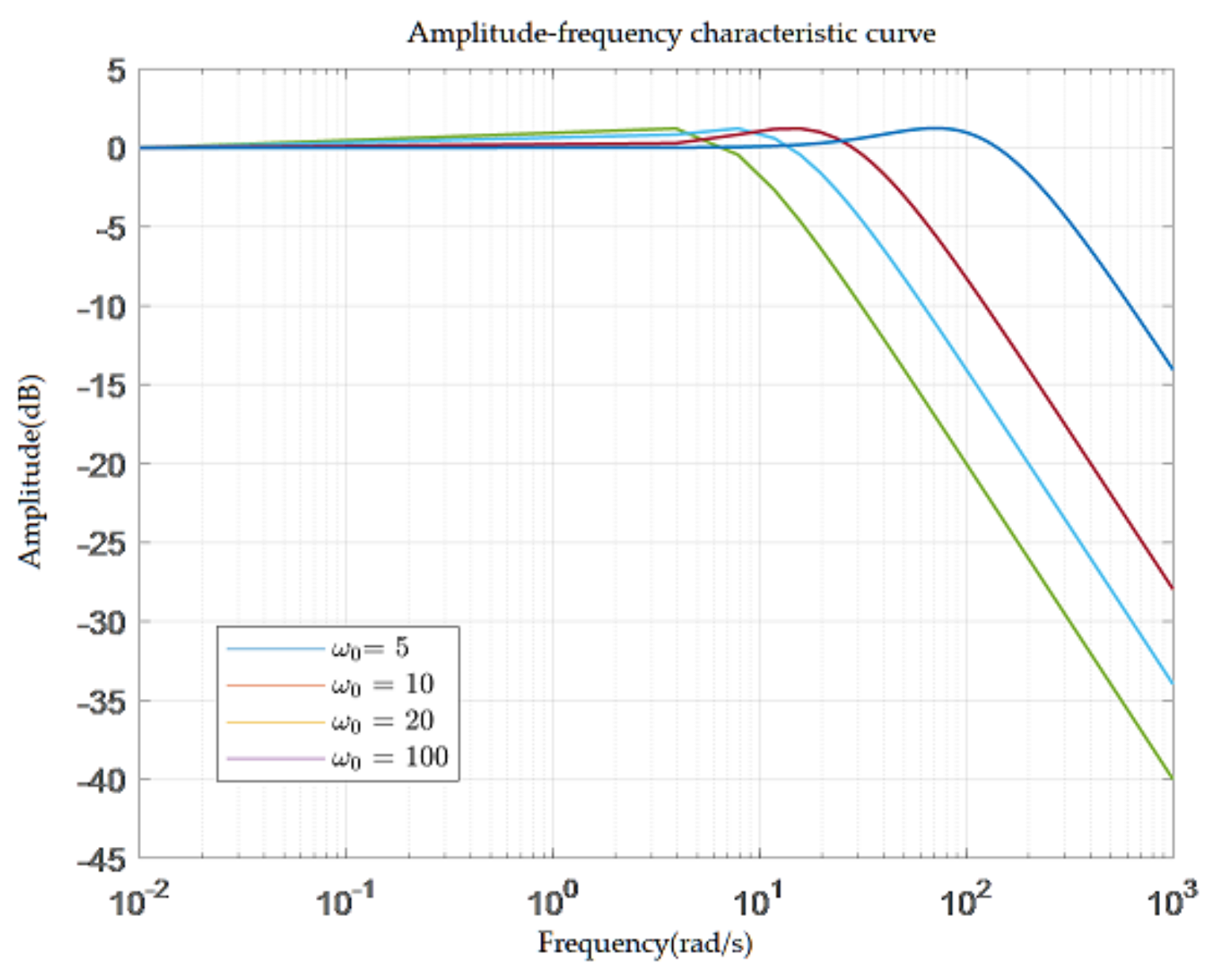
- LESO bandwidth should be selected according to the cutoff frequency of the control loop. The selection range of is generally between 5 and 20, and the selected bandwidth should not cause the ESO oscillation.
- Step 3:
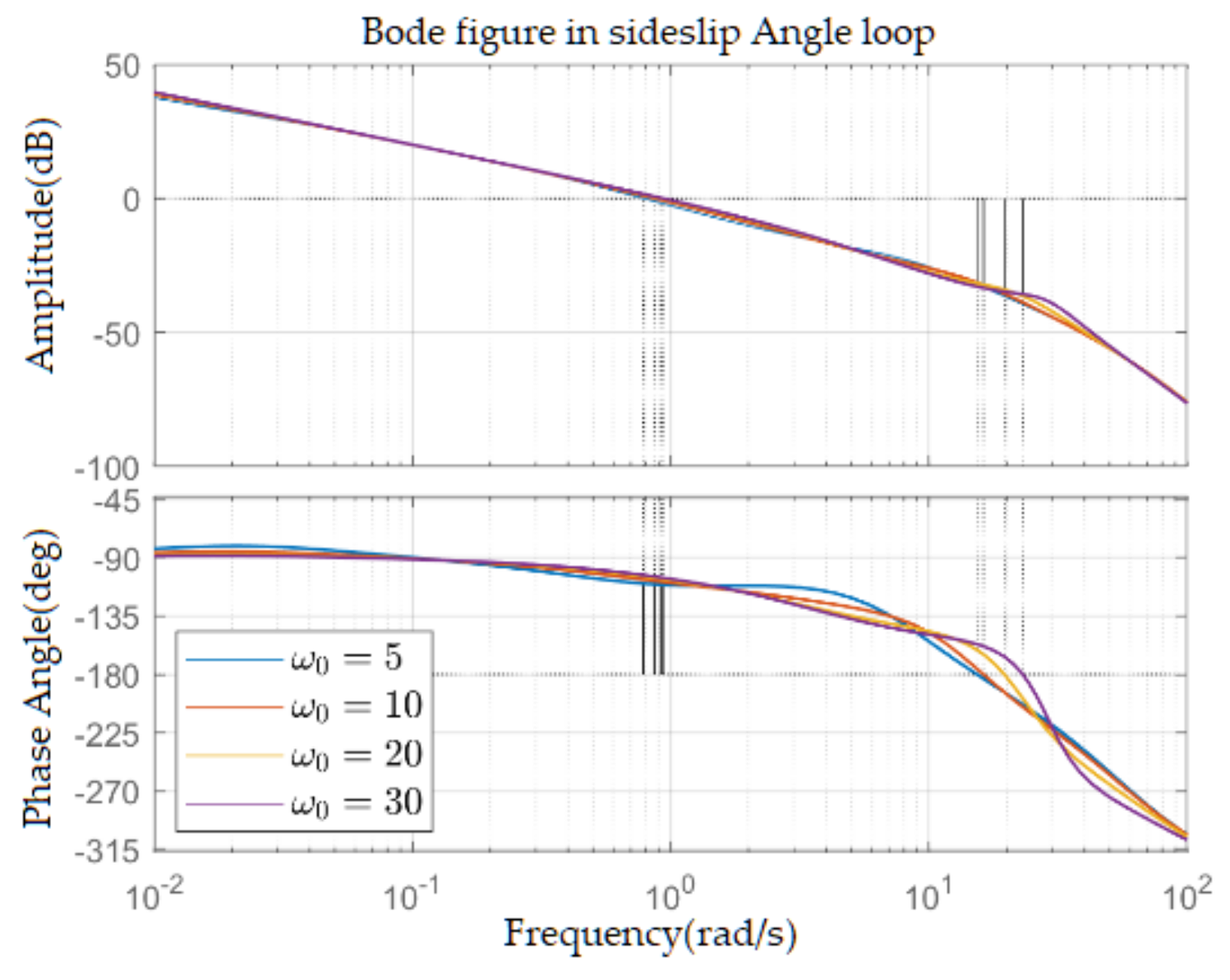
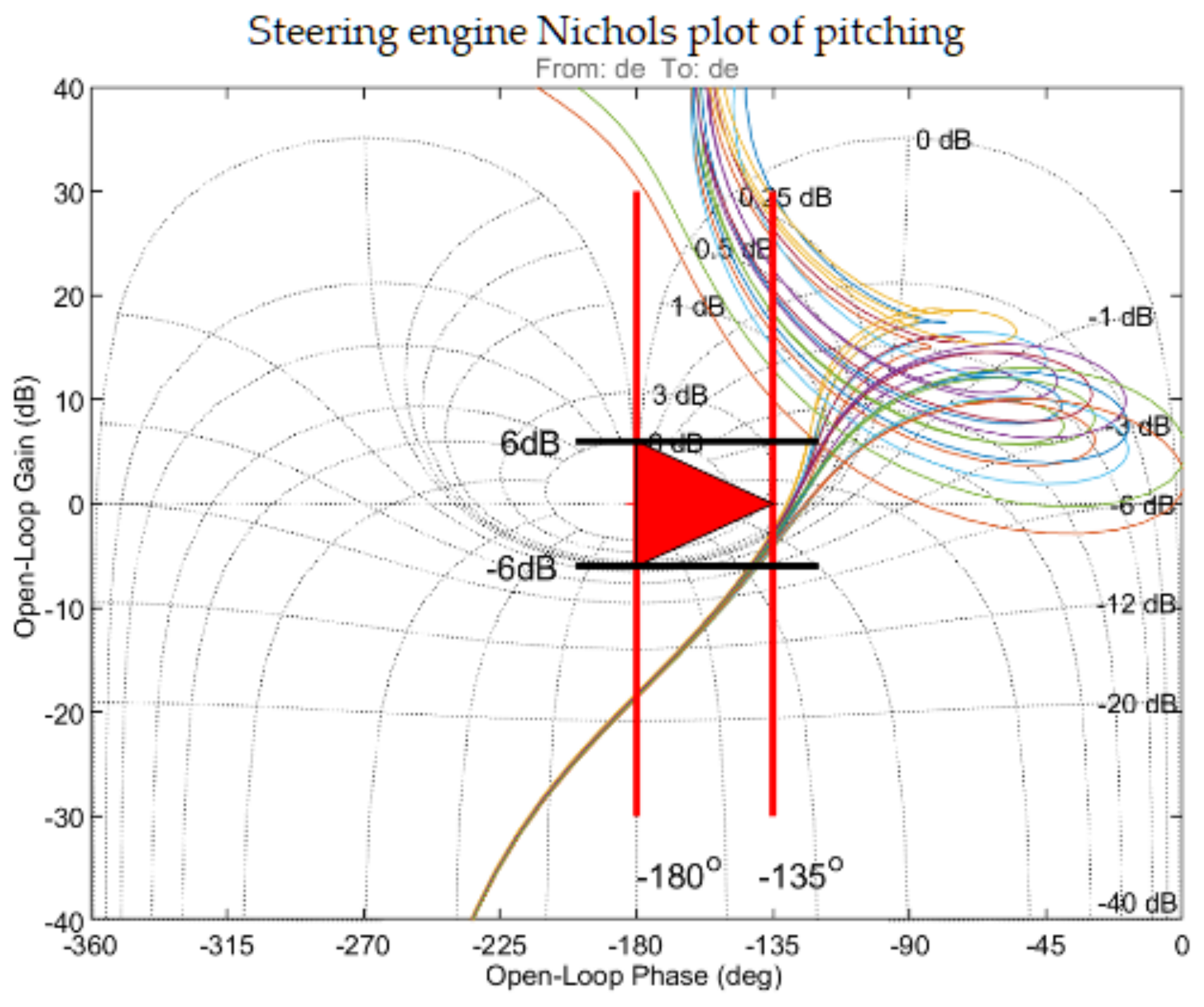
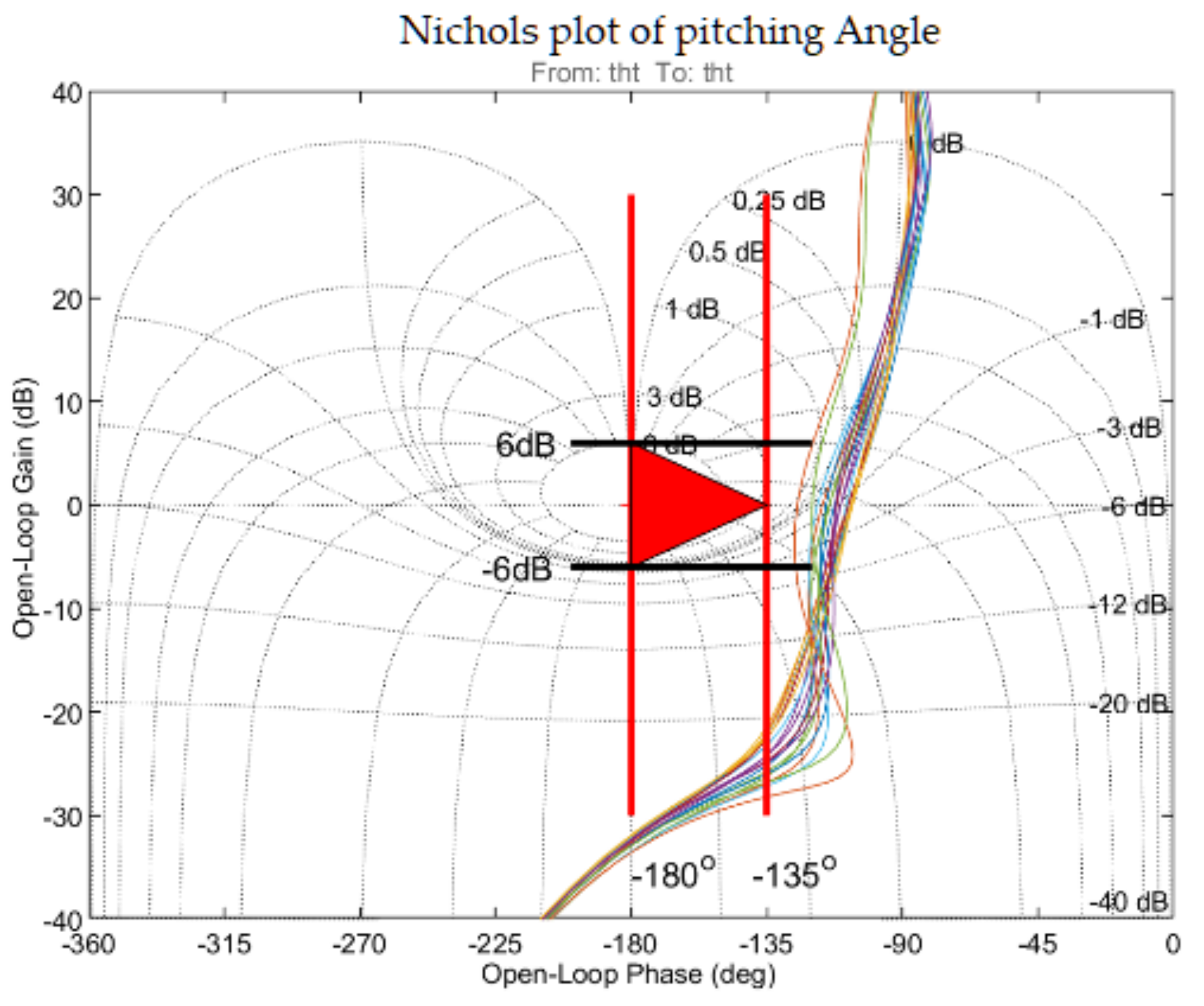
- The stable index of amplitude margin and phase angle margin is used to judge whether the controller meets the frequency requirements, and the time-domain response is used to judge whether the system meets the dynamic performance requirements. If it meets the index requirements, the setting ends; otherwise, the next step is carried out.
- Step 4:
- Adjust the control law gain, , by Nichols diagram or time-domain response curve and return to Step 3.
4. Flight Test Analysis and Verification
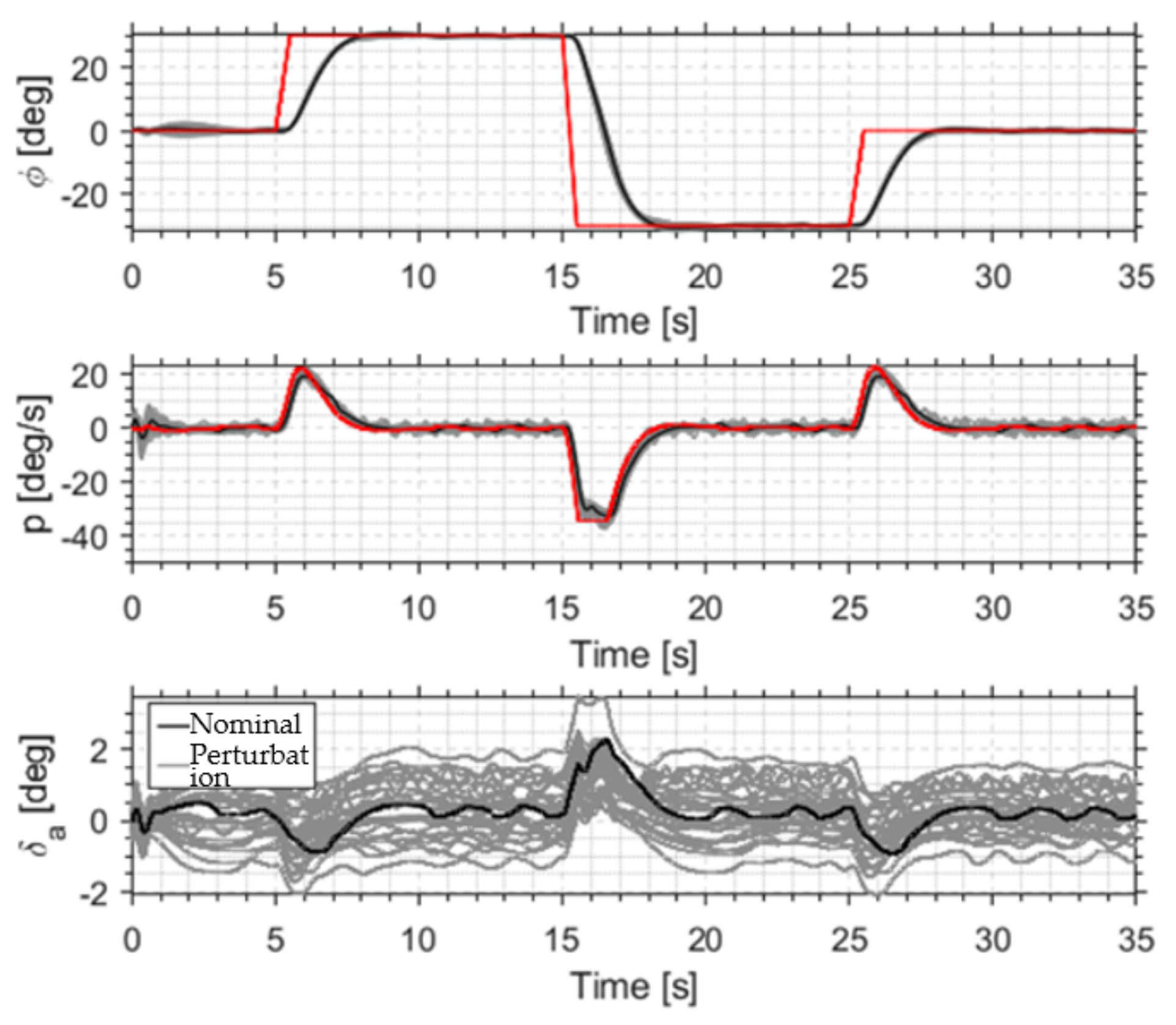
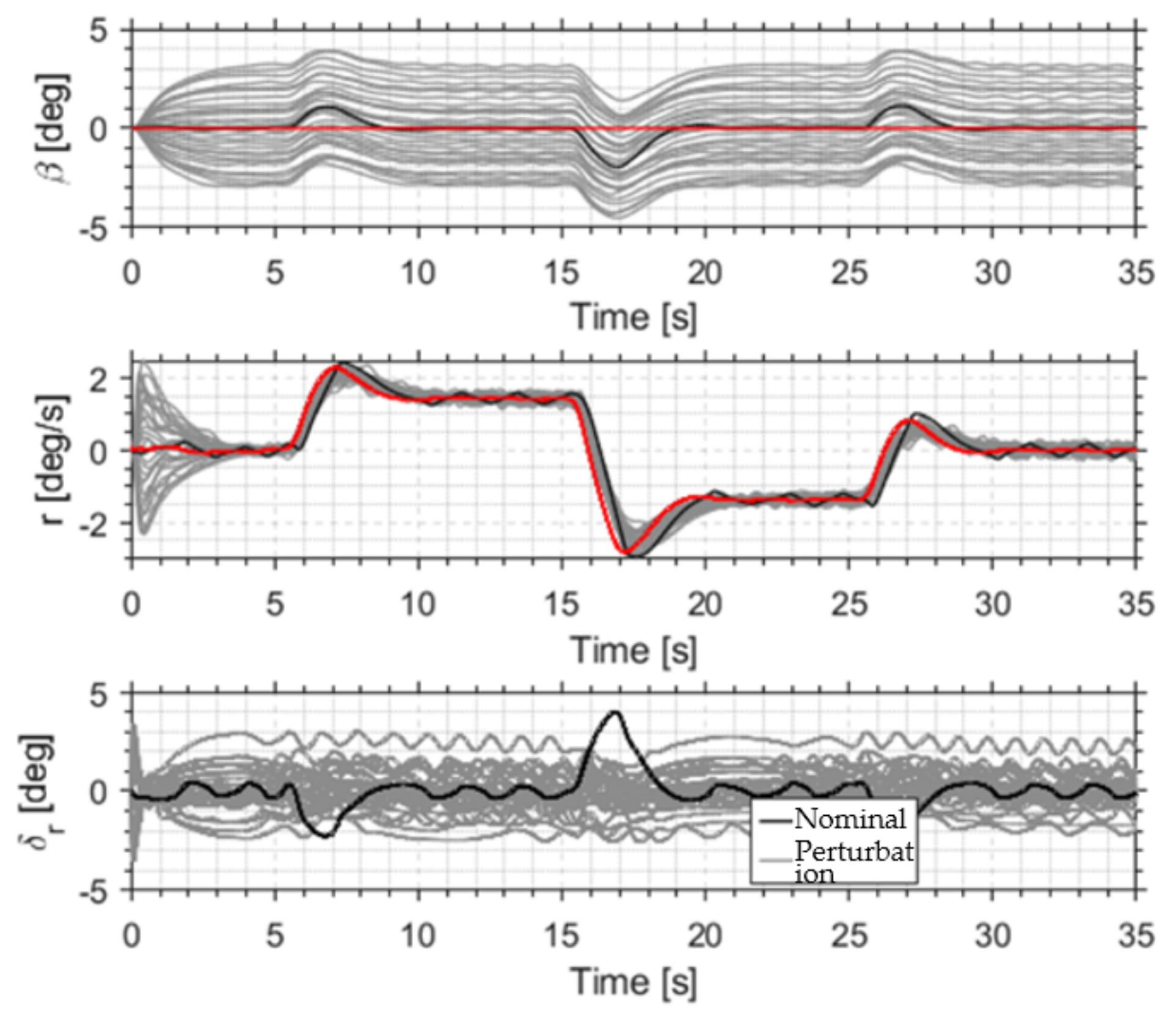
4.1. Inner Loop Verification
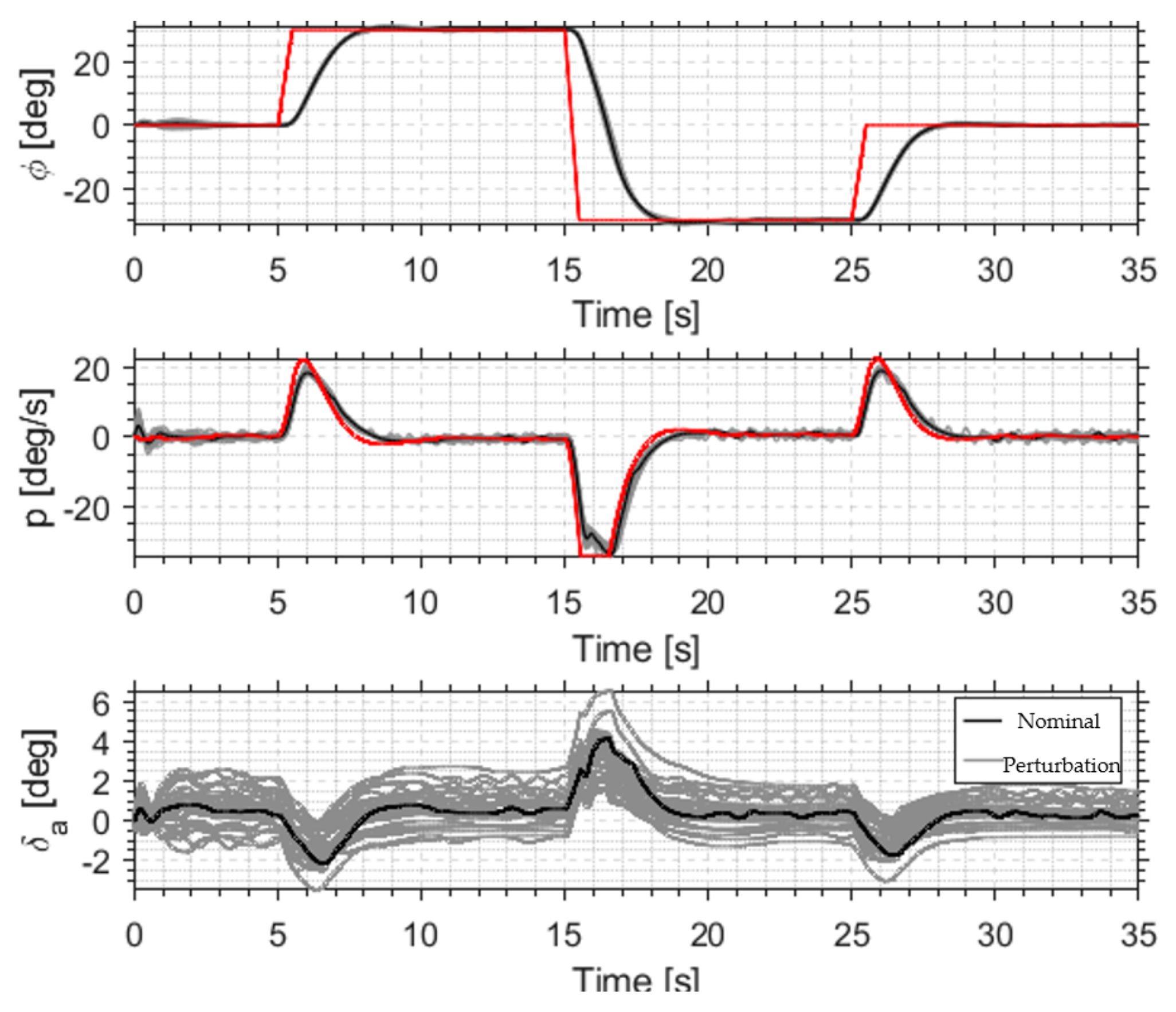
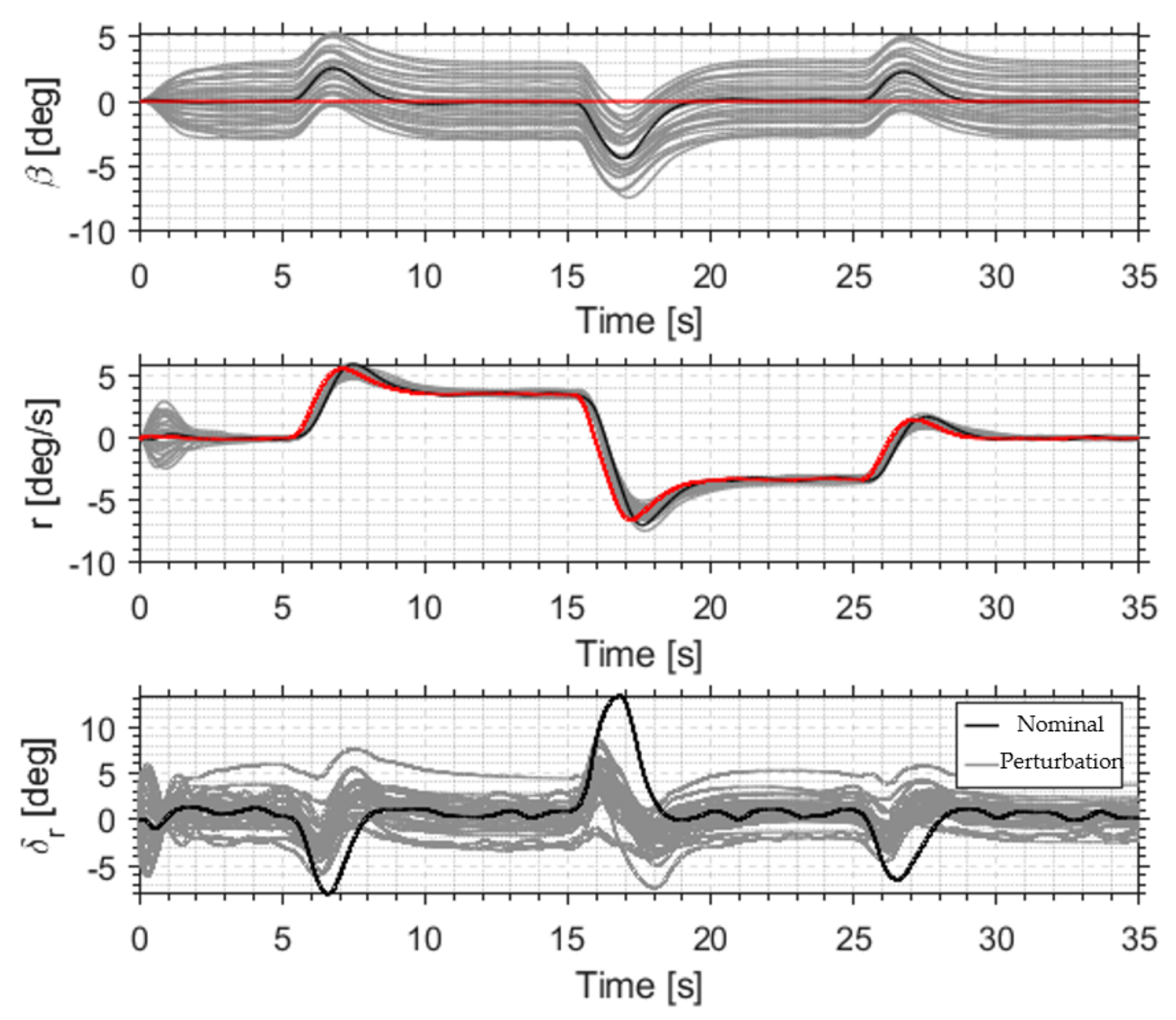
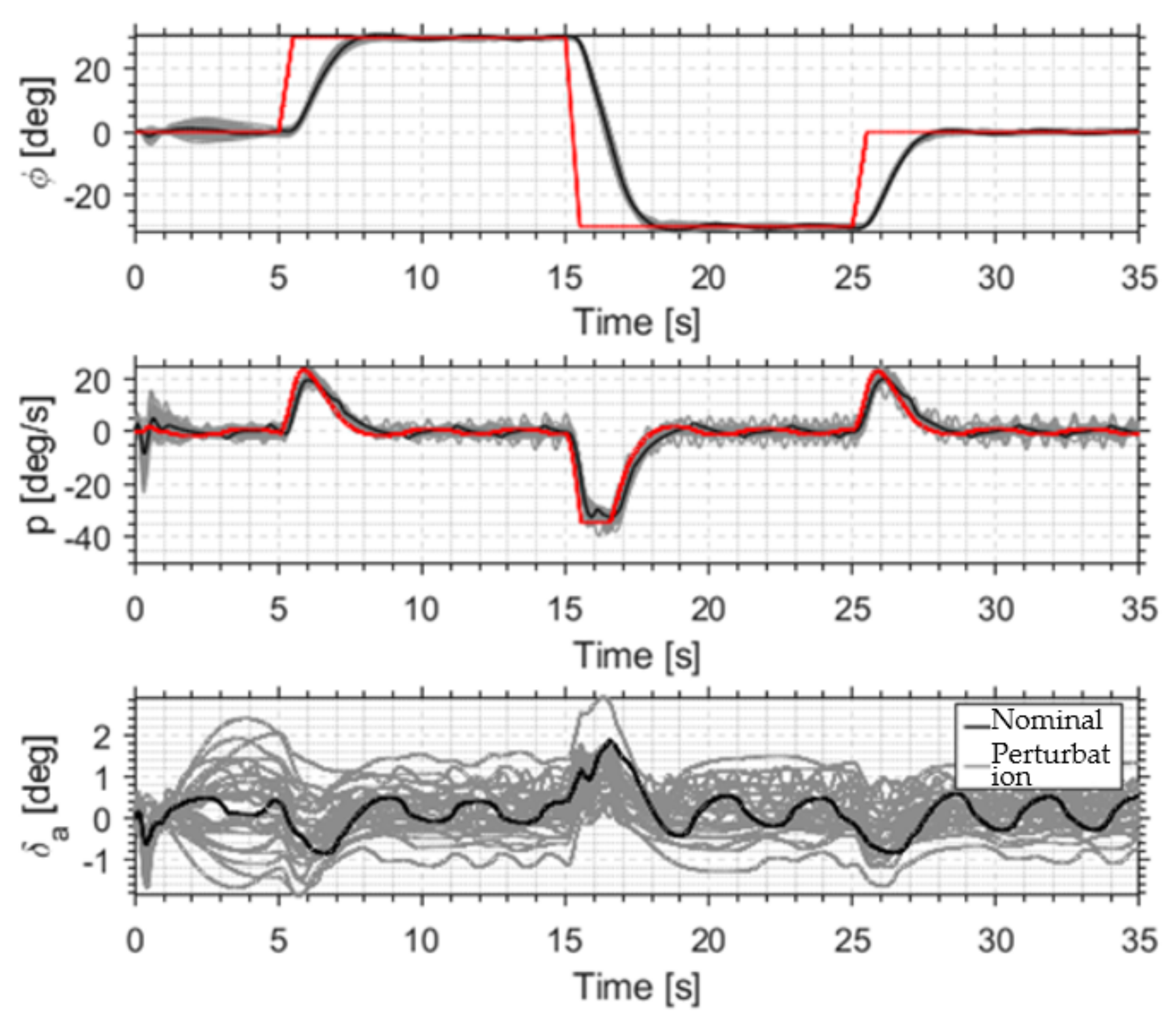
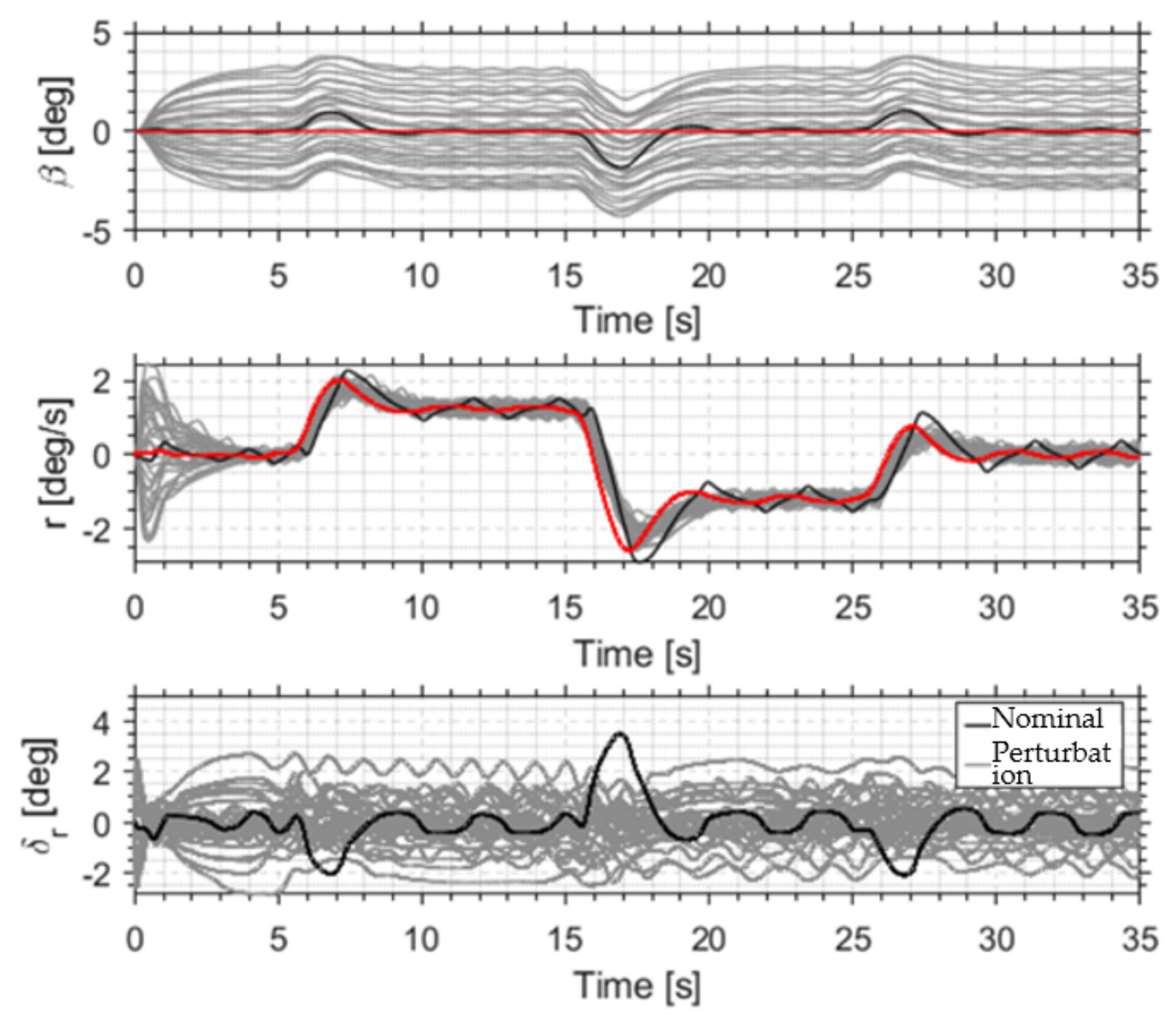
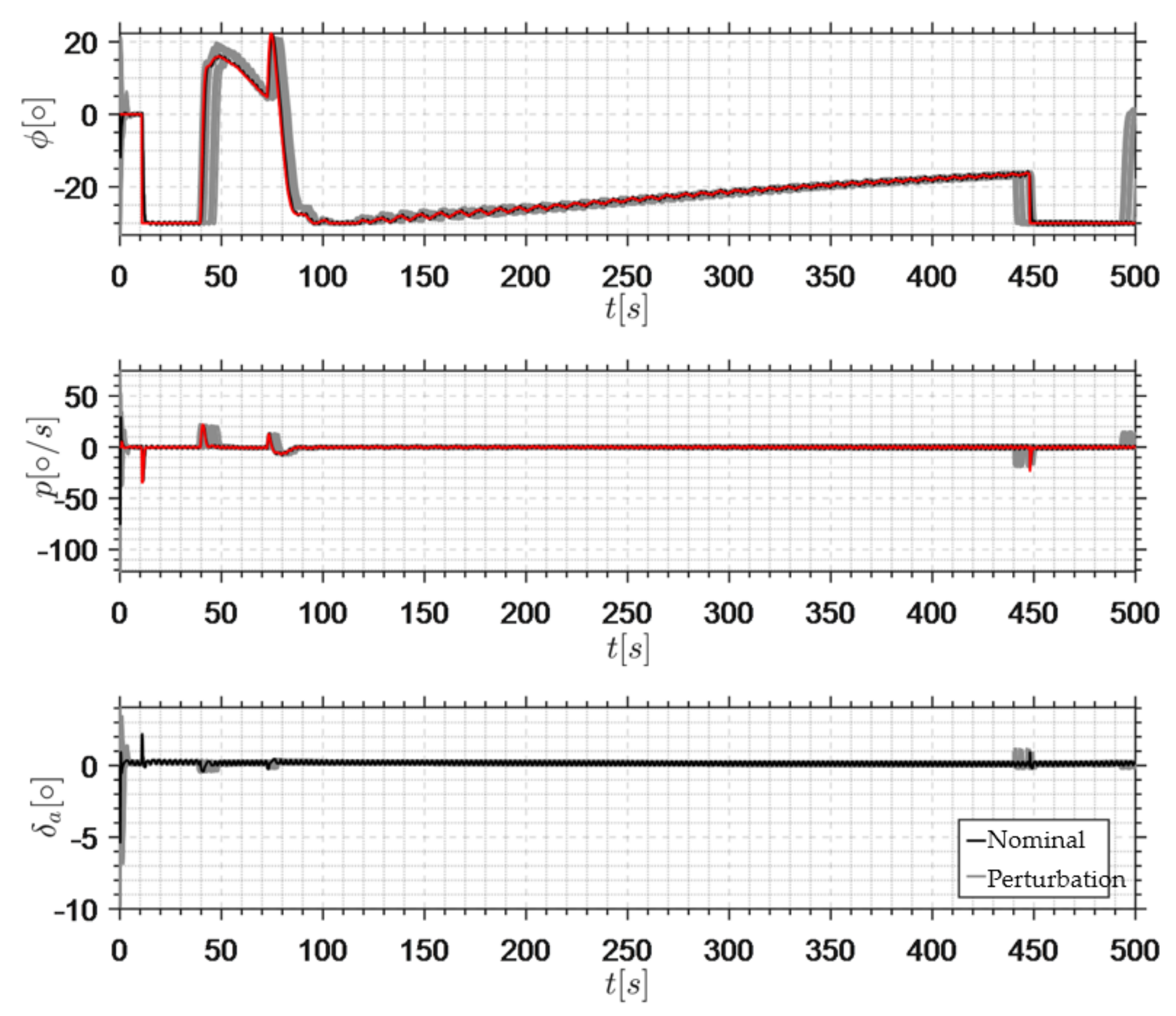
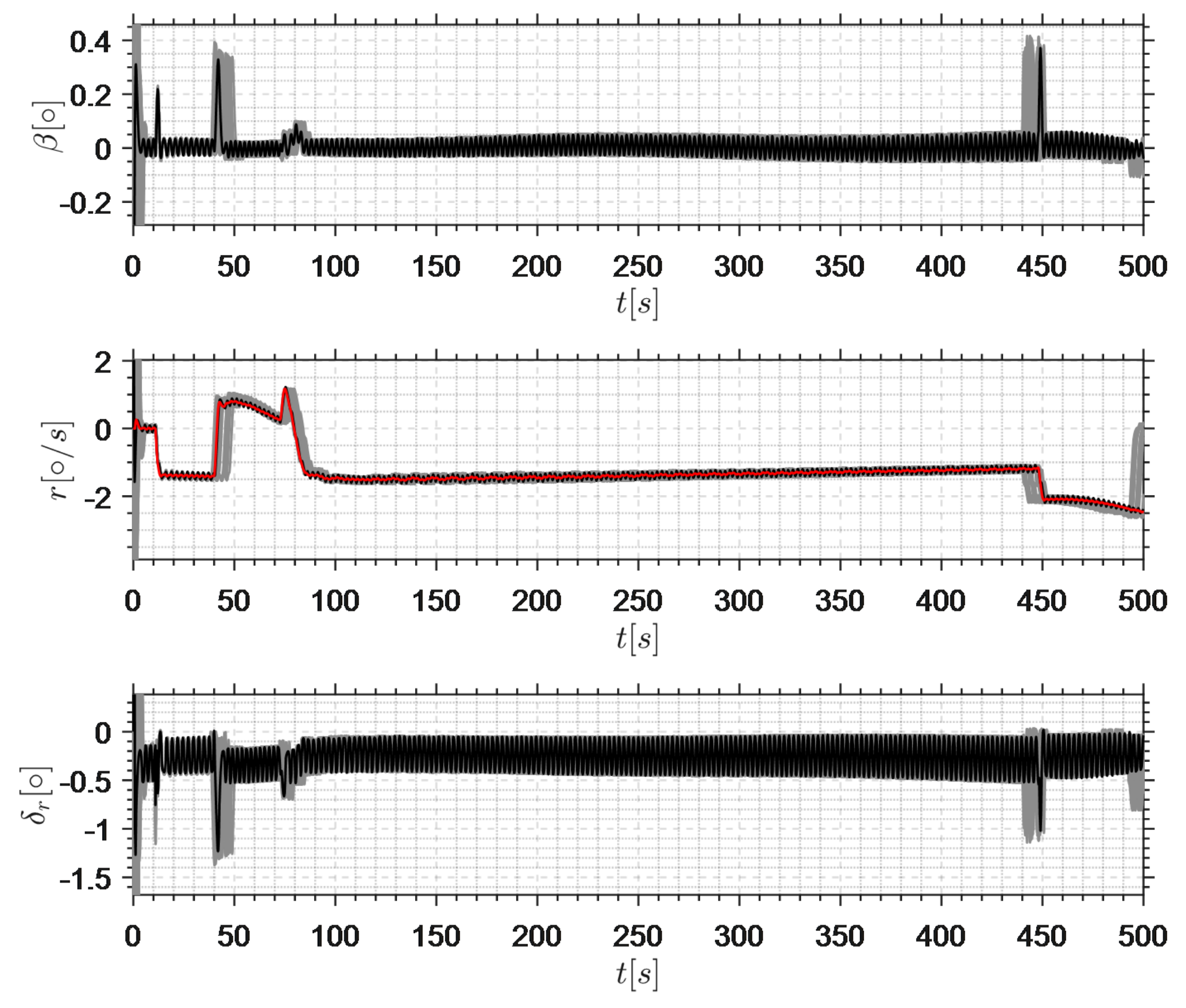
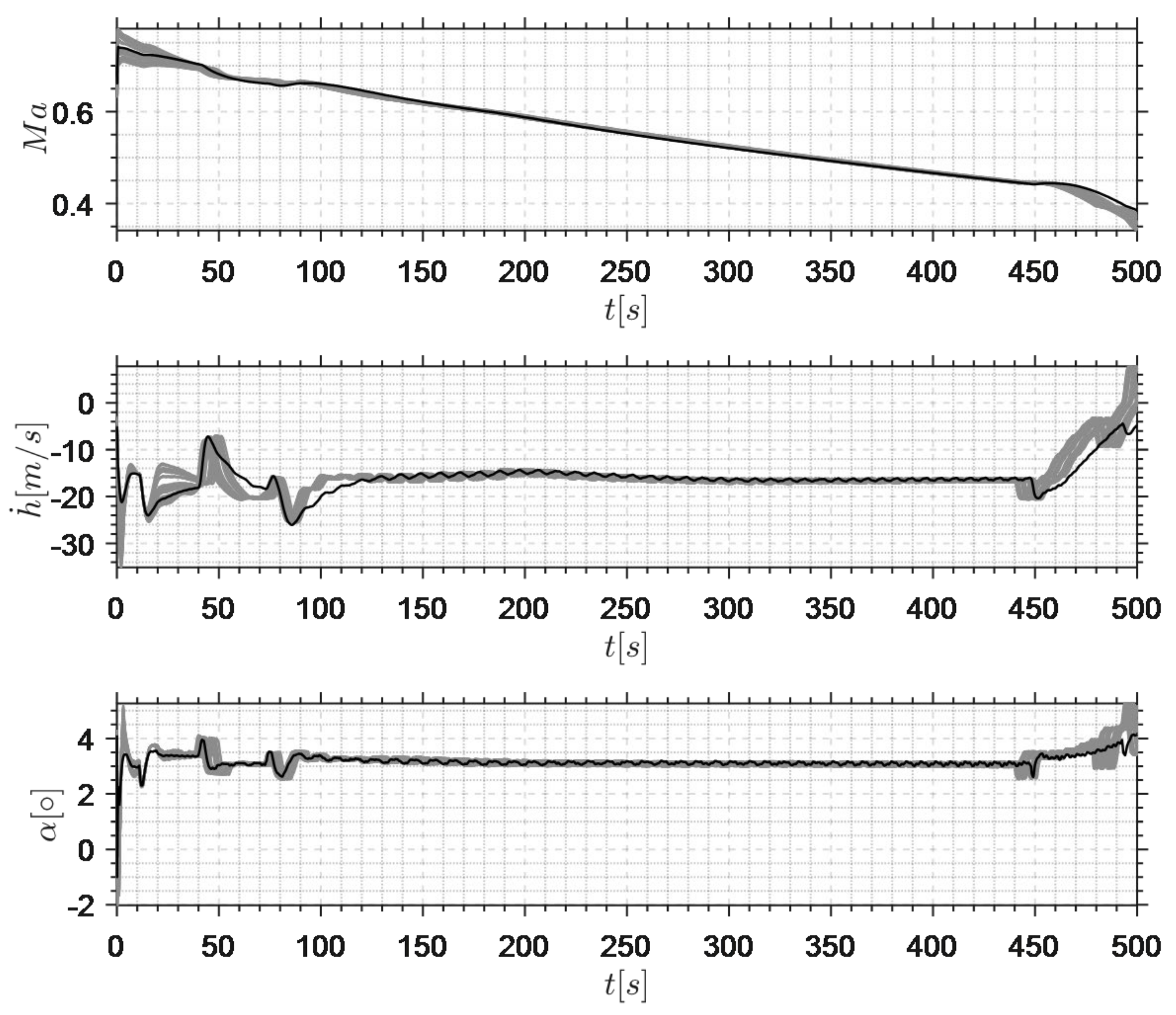
4.2. Perturbation Simulation of Inner Loop Maneuver
4.3. Simulation Validation
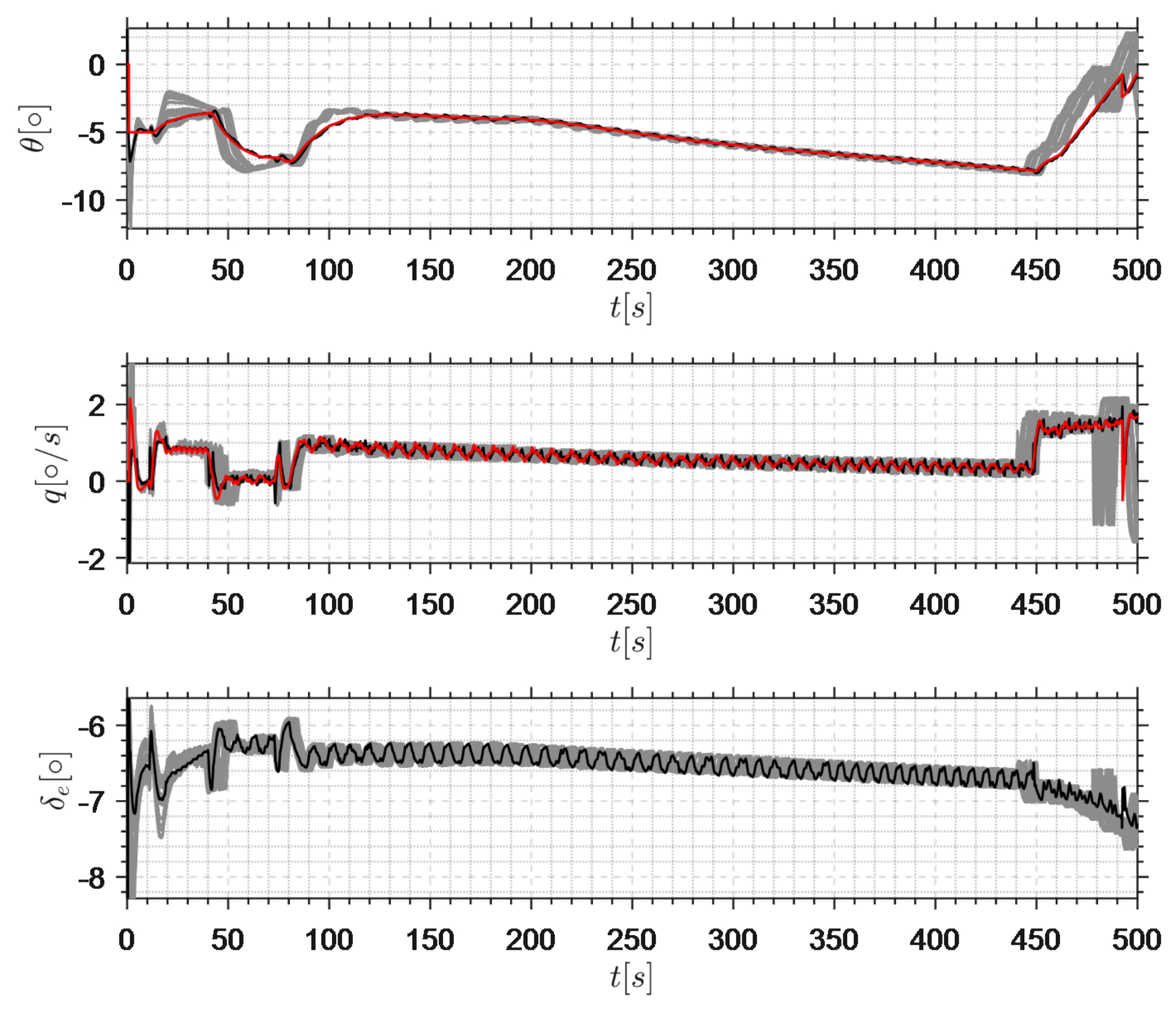
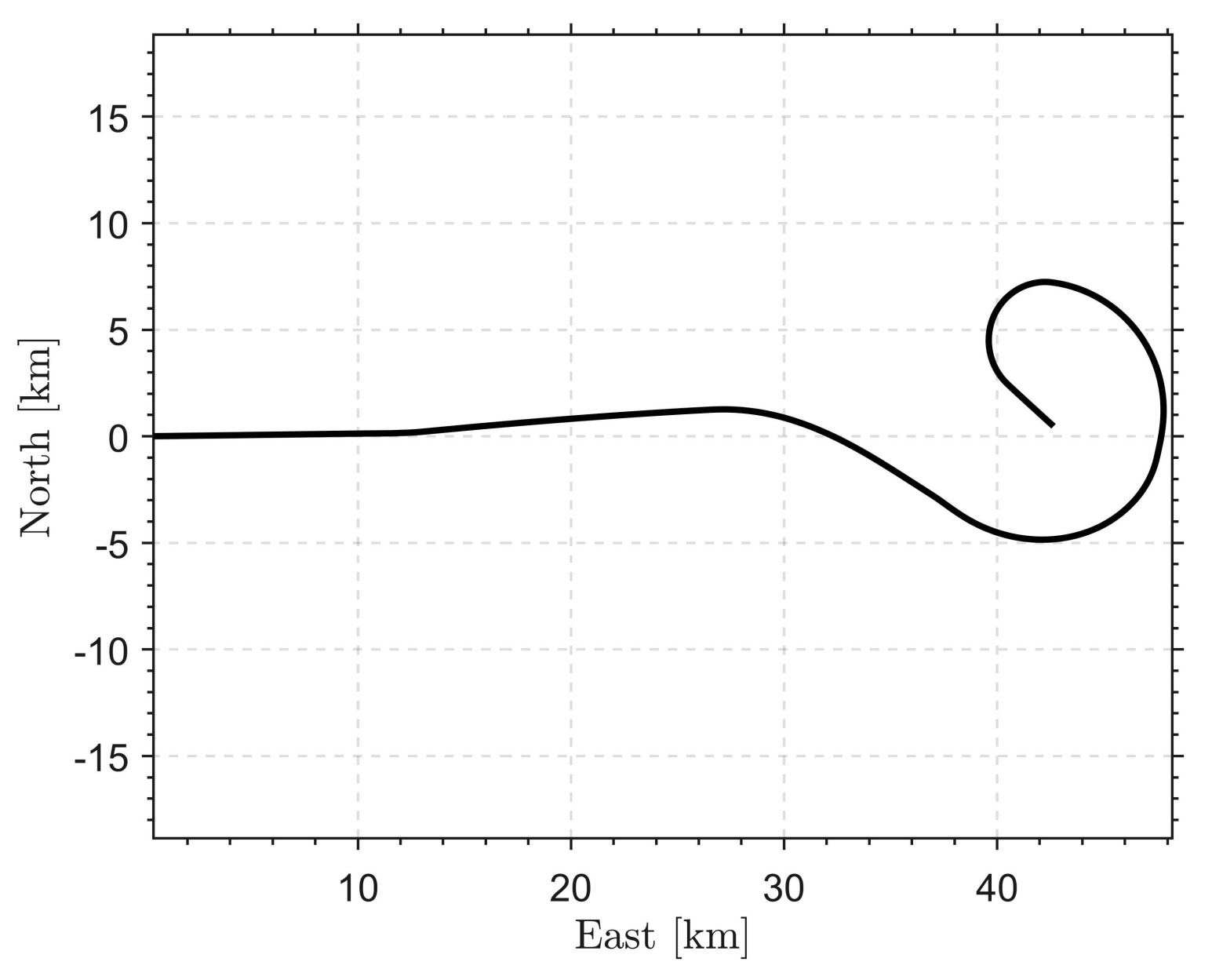
4.3.1. Powered Return Flight
- Longitudinal control pitch angle is −5° (balanced sliding performance);
- Laterally control the roll angle rate to 0°/s in the first second of entering the delivery section. Then, control the roll angle to 0°;
- Longitudinally control the yaw angular rate to 0°/s in the first second of entering the launching section. Then, control the sideslip angle to 0°.
- The current flight path is a powered flight path and enters the launching section for more than 10 s. The roll angle is less than 5°, the pitch angle deviation is less than 5°, and the sideslip angle is less than 5°;
- The current mission is an unpowered mission and enters the launching section for more than 10 s;
- The current mission is a powered mission and enters the launching section for more than 12 s;
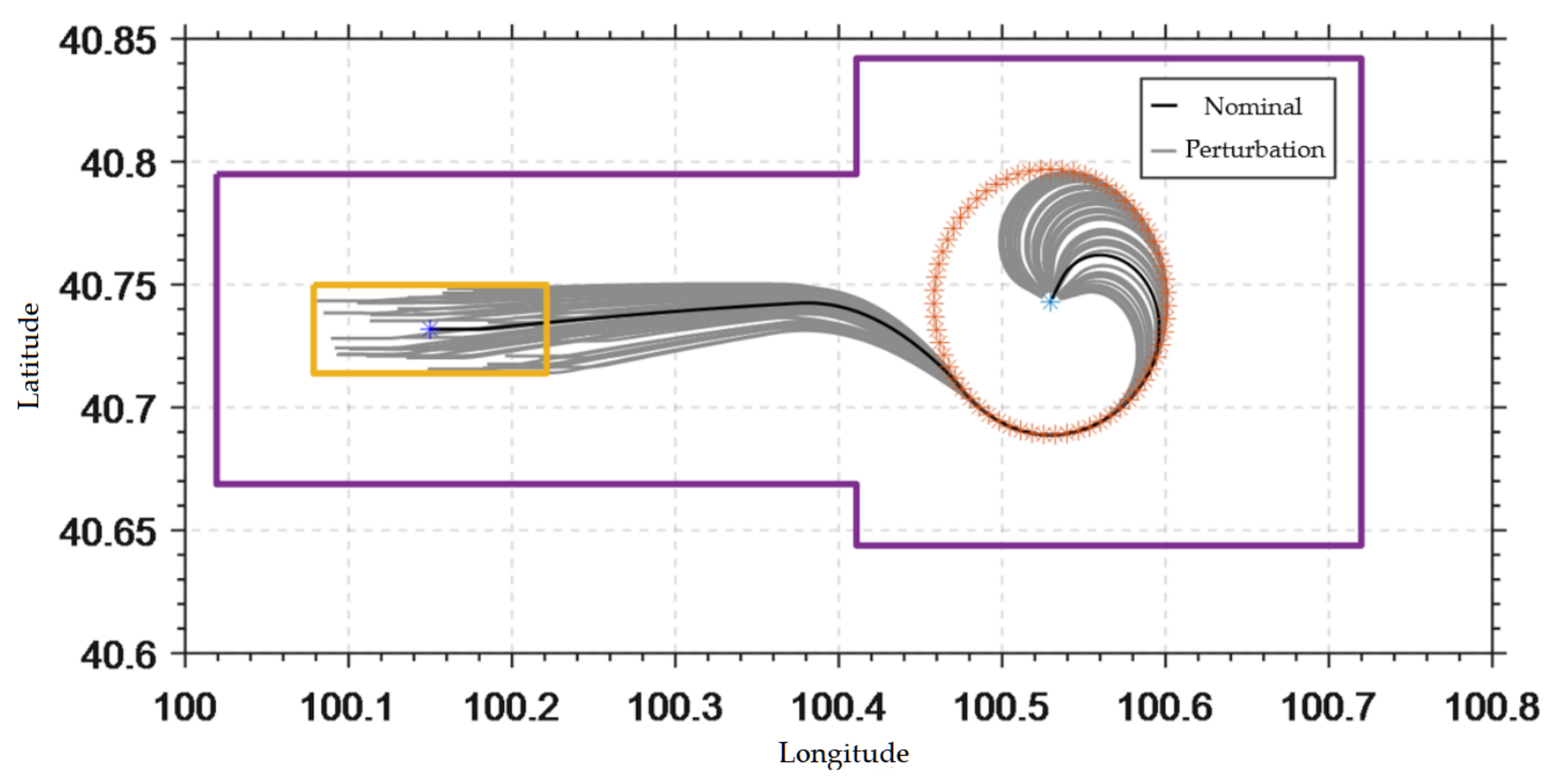
4.3.2. Unpowered Return Flight
- Energy ratio is less than 1.2;
- Height less than 2.5 km.
4.3.3. The Recovery Period
- The distance is less than 400 m;
- Altitude is less than 1850 m;
- Airspeed is lower than 320 km/h.
4.4. Real-World Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kroo, I. Aerodynamic concepts for future aircraft. In Proceedings of the 30th Fluid Dynamics Conference, Norfolk, VA, USA, 28 June–1 July 1999. [Google Scholar]
- Roman, D. Aerodynamic design challenges of the blended-wing-body subsonic transport. In Proceedings of the 18th Applied Aerodynamics Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar]
- He, Z.; Hu, J.; Wang, Y.; Cong, J.; Han, L.; Su, M. Sample entropy based prescribed performance control for tailless aircraft. ISA Trans. 2022, 131, 349–366. [Google Scholar] [CrossRef] [PubMed]
- Rostami, M.; Bardin, J.; Neufeld, D.; Chung, J. A Multidisciplinary Possibilistic Approach to Size the Empennage of Multi-Engine Propeller-Driven Light Aircraft. Aerospace 2022, 9, 160. [Google Scholar] [CrossRef]
- Zhou, Z.; Huang, J. Hybrid Deflection of Spoiler Influencing Radar Cross-Section of Tailless Fighter. Sensors 2021, 21, 8459. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Luo, L.; Zhang, B. An Aerodynamic Design Method to Improve the High-Speed Performance of a Low-Aspect-Ratio Tailless Aircraft. Appl. Sci. 2021, 11, 1555. [Google Scholar] [CrossRef]
- Nie, B.; Liu, Z.; Guo, T.; Fan, L.; Ma, H.; Sename, O. Design and Validation of Disturbance Rejection Dynamic Inverse Control for a Tailless Aircraft in Wind Tunnel. Appl. Sci. 2021, 11, 1407. [Google Scholar] [CrossRef]
- Liu, L.; Tian, B. Comprehensive Engineering Frequency Domain Analysis and Vibration Suppression of Flexible Aircraft Based on Active Disturbance Rejection Controller. Sensors 2022, 22, 6207. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Bing, F.; Guo, Z.; Wu, L. Rope-Hook Recovery Controller Designed for a Flying-Wing UAV. Aerospace 2021, 8, 384. [Google Scholar] [CrossRef]
- Zhang, Q.; Wei, Y.; Li, X. Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control. Appl. Sci. 2021, 11, 11583. [Google Scholar] [CrossRef]
- Huang, L.; Pei, H. Design of Yaw Controller for a Small Unmanned Helicopter Based on Improved ADRC. Guid. Navig. Control 2021, 1, 2140001. [Google Scholar] [CrossRef]
- Shen, S.; Xu, J. Adaptive neural network-based active disturbance rejection flight control of an unmanned helicopter. Aerosp. Sci. Technol. 2021, 119, 107062. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley and Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- MILF-8785C; Military Specification Flying Qualities of Piloted Airplanes. United States Air Force: Washington, DC, USA, 1991.
- Wang, Z.; Li, J.; Duan, D. Manipulation strategy of tilt quad rotor based on active disturbance rejection control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 573–584. [Google Scholar] [CrossRef]
- Song, C.; Wei, C.; Yang, F.; Cui, N. High-order sliding mode-based fixed-time active disturbance rejection control for quadrotor attitude system. Electronics 2018, 7, 357. [Google Scholar] [CrossRef]
- Han, J. Active disturbance rejection controller and its applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Guerrero-Castellanos, J.F.; Durand, S.; Munoz-Hernandez, G.A.; Marchand, N.; Romeo, L.L.G.; Linares-Flores, J.; Mino-Aguilar, G.; Guerrero-Sánchez, W.F. Bounded Attitude Control with Active Disturbance Rejection Capabilities for Multirotor UAVs. Appl. Sci. 2021, 11, 5960. [Google Scholar] [CrossRef]
- Zhuang, H.; Sun, Q.; Chen, Z.; Zeng, X. Back-stepping Active Disturbance Rejection Control for Attitude Control of Aircraft Systems Based on Extended State Observer. Int. J. Control Autom. Syst. 2021, 19, 2134–2149. [Google Scholar] [CrossRef]
- Mei, D.; Yu, Z.Q. Active disturbance rejection control strategy for airborne radar stabilization platform based on cascade extended state observer. Assem. Autom. 2020, 40, 613–624. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; Volume 6. [Google Scholar]
- Kong, S.; Sun, J.; Qiu, C.; Wu, Z.; Yu, J. Extended State Observer-Based Controller With Model Predictive Governor for 3-D Trajectory Tracking of Underactuated Underwater Vehicles. IEEE Trans. Ind. Inform. 2021, 17, 6114–6124. [Google Scholar] [CrossRef]
- Luo, S.; Sun, Q.; Sun, M.; Tan, P.; Wu, W.; Sun, H.; Chen, Z. On decoupling trajectory tracking control of unmanned powered parafoil using ADRC-based coupling analysis and dynamic feedforward compensation. Nonlinear Dyn. 2018, 92, 1619–1635. [Google Scholar] [CrossRef]
- Olsson, A.M.J.; Sandberg, G.E. Latin hypercube sampling for stochastic fifinite element analysis. J. Eng. Mech. 2002, 128, 121–125. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (km) | Mach Number |
|---|---|
| 10 | 0.6 0.7 0.8 |
| 11 | 0.6 0.7 0.8 |
| 12 | 0.6 0.7 0.8 |
| Height (km) | Mach Number |
|---|---|
| 11 | 0.6 0.7 0.8 0.9 1.0 |
| 12 | 0.9 1.0 1.1 1.2 |
| 13 | 1.0 1.1 1.2 1.3 1.4 1.5 1.6 |
| Height (km) | Mach Number |
|---|---|
| 1 | 0.2 0.3 0.4 |
| 3 | 0.3 0.4 0.5 |
| 5 | 0.3 0.4 0.5 0.6 |
| 7 | 0.4 0.5 0.6 0.7 |
| 9 | 0.6 0.7 0.8 |
| 11 | 0.6 0.7 0.8 0.9 |
| 13 | 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 |
| Instructions | Simulation Time (Unit: S) | |||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 5 | 5.5 | 15 | 15.5 | 25 | 25.5 | 30 | |
| Roll angle instruction | 0 | 0 | 30° | 30° | −30° | −30° | 0 | 0 |
| Pitch angle instruction | The pitch angle is the trim angle of attack | |||||||
| Side-slip angle instruction | 0 | |||||||
| Parameter | Uncertainty | Parameter | Uncertainty |
|---|---|---|---|
| rotational inertia | ±10% | Derivative of static stability | ±20% |
| Pneumatic rudder control derivative | ±20% | Side-slip measurement deviation | ±3° |
| Deviation of center of gravity | ±1 cm | Deviation of aircraft flight status at drop time | ±5% |
| Sonic deflection | ±15% | Dynamic pressure deflection | ±15% |
| Pitch control derivative deviation | ±20% | Pitch damping derivative deviation | ±80% |
| Pitch static stability derivative deviation | ±20% | Lift control derivative deviation | ±20% |
| Pitch lift damping derivative deviation | ±50% | Lift line slope deviation | ±20% |
| Derivative deviation of side force | ±20% | Lateral force control derivative deviation | ±20% |
| Derivative deviation of roll angle velocity side force | ±50% | Yaw angular velocity lateral force derivative deviation | ±20% |
| Roll moment static stability derivative deviation | ±20% | Aileron control cross derivative deviation | ±20% |
| Roll moment control derivative deviation | ±20% | Intercross dynamic derivative deviation | ±80% |
| Rudder control cross derivative deviation | ±20% | Yaw damping derivative deviation | ±80% |
| Roll damping derivative deviation | ±80% | Aileron rudder surface clearance | 0.3° |
| Intercross dynamic derivative deviation | ±80% | Clearance of elevator rudder surface | 0.3° |
| Deviation of static stability derivative of yaw moment | ±10% | Clearance of rudder surface | 0.3° |
| Yaw moment control derivative deviation | ±30% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Hu, L.; Fei, W.; Zhou, D.; Yang, D.; Ma, C.; Gong, Z.; Wu, J.; Zhang, C.; Yang, Y. High-Performance Attitude Control Design of Supersonic Tailless Aircraft: A Cascaded Disturbance Rejection Approach. Aerospace 2023, 10, 198. https://doi.org/10.3390/aerospace10020198
Wang Z, Hu L, Fei W, Zhou D, Yang D, Ma C, Gong Z, Wu J, Zhang C, Yang Y. High-Performance Attitude Control Design of Supersonic Tailless Aircraft: A Cascaded Disturbance Rejection Approach. Aerospace. 2023; 10(2):198. https://doi.org/10.3390/aerospace10020198
Chicago/Turabian StyleWang, Zian, Lei Hu, Wanghua Fei, Dapeng Zhou, Dapeng Yang, Chenxi Ma, Zheng Gong, Jin Wu, Chengxi Zhang, and Yi Yang. 2023. "High-Performance Attitude Control Design of Supersonic Tailless Aircraft: A Cascaded Disturbance Rejection Approach" Aerospace 10, no. 2: 198. https://doi.org/10.3390/aerospace10020198
APA StyleWang, Z., Hu, L., Fei, W., Zhou, D., Yang, D., Ma, C., Gong, Z., Wu, J., Zhang, C., & Yang, Y. (2023). High-Performance Attitude Control Design of Supersonic Tailless Aircraft: A Cascaded Disturbance Rejection Approach. Aerospace, 10(2), 198. https://doi.org/10.3390/aerospace10020198