

Hybrid Adaptive Control for Tiltrotor Aircraft Flight Control Law Reconfiguration


Abstract
:1. Introduction
2. Reconfigurability Evaluation
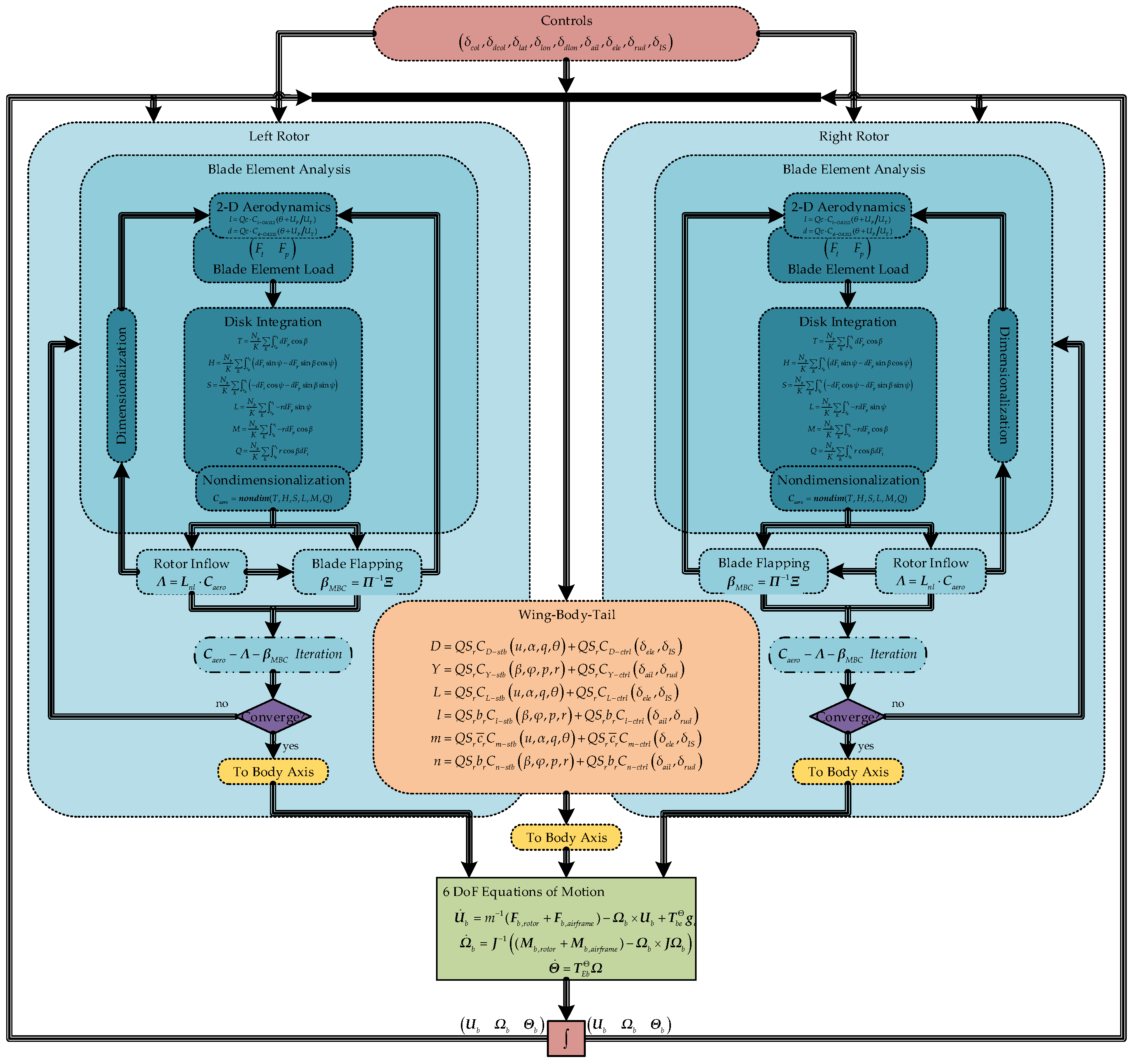
2.1. Flight Dynamics Model of the Tiltrotor Aircraft
2.1.1. Rotor Forces and Moments
2.1.2. Airframe Forces and Moments
2.2. Model Trimming and Control Effectiveness
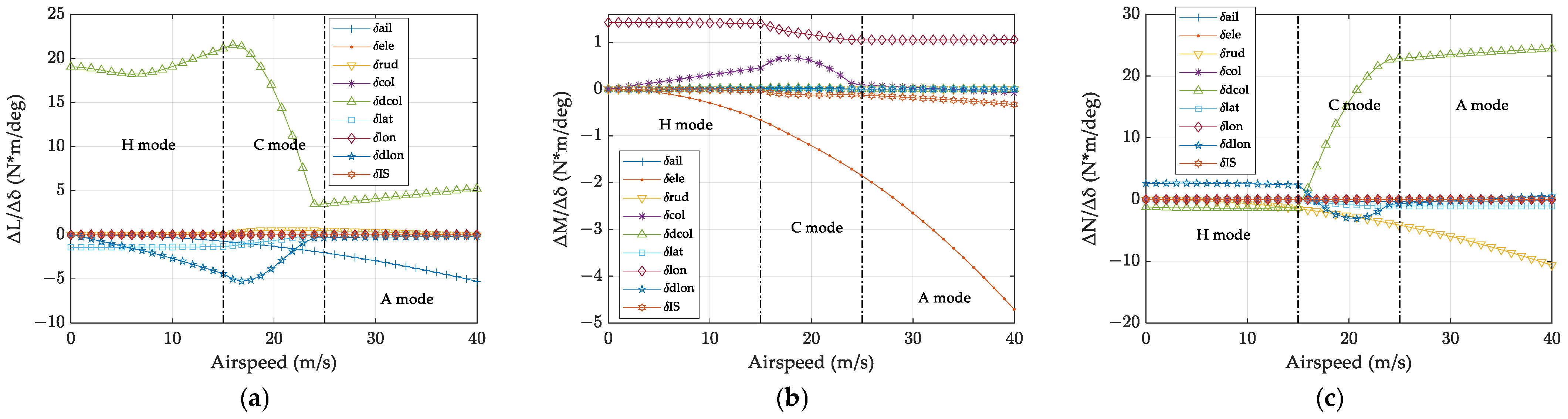
- Rolling Axis. As the airspeed increases (during the conversion from the helicopter to airplane mode), the effectiveness of differential collective pitch () on rolling moment decreases rapidly. The differential collective transitions from controlling rolling to that of yawing (see Figure 3a,c). In the meantime, the rolling effectiveness of lateral cyclic pitch () also decreases with the forward tilting of the rotor nacelle. On the contrary, the rudder () contributes to an increasing rolling moment as airspeed increases, given the buildup of dynamic pressure. Also, it is worth noting the cross-coupling effect of differential longitudinal cyclic pitch (), which is the primary yawing control during helicopter mode, on both rolling and yawing channels. Coupling on the rolling axis is mainly because of the unsymmetric thrust variation during differential longitudinal flapping, which causes the difference in the effective blade element angle of attack on each rotor.
- Pitching Axis. Pitching controls are of great importance for tiltrotor aircraft conversion, during which the primary longitudinal controls are the longitudinal cyclic pitch () and the elevator (), see Figure 3b. The elevator pitching moment increases significantly with airspeed as dynamic pressure builds up, whereas the decrease in longitudinal cyclic pitching moment is much less obvious with respect to the airspeed. The collective pitch () also has some influence on the pitching moment because of the relative position of the thrust vector with respect to the aircraft’s center of gravity.
- Yawing Axis. Primary controls are differential collective pitch () and the rudder, among which the former presents a much more controlling moment than the latter, see Figure 3c. The collective pitch, however, is coupling in both heading control and lateral control.
2.3. Redundant Control Allocation Based on Optimal Control Effectiveness
3. Basic Flight Controller for Normal Conditions
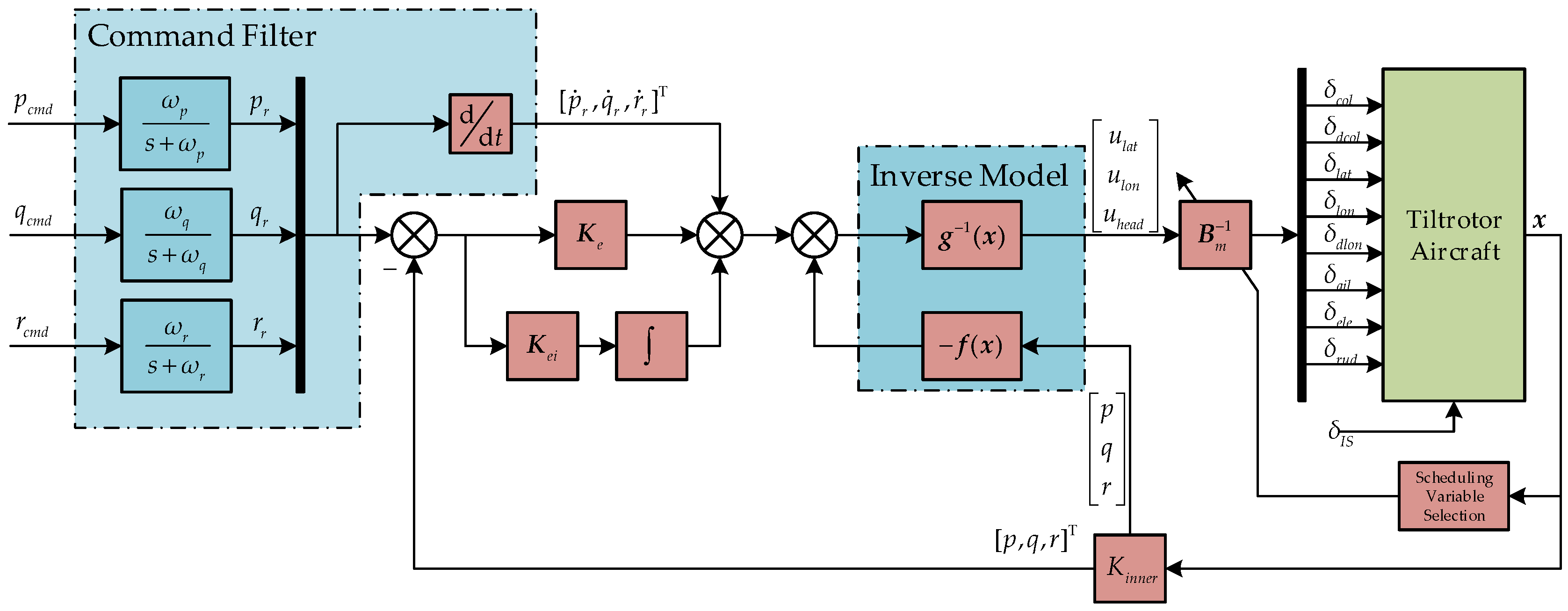
3.1. Feedback Linearization Control for the Inner Angular Rate Loop
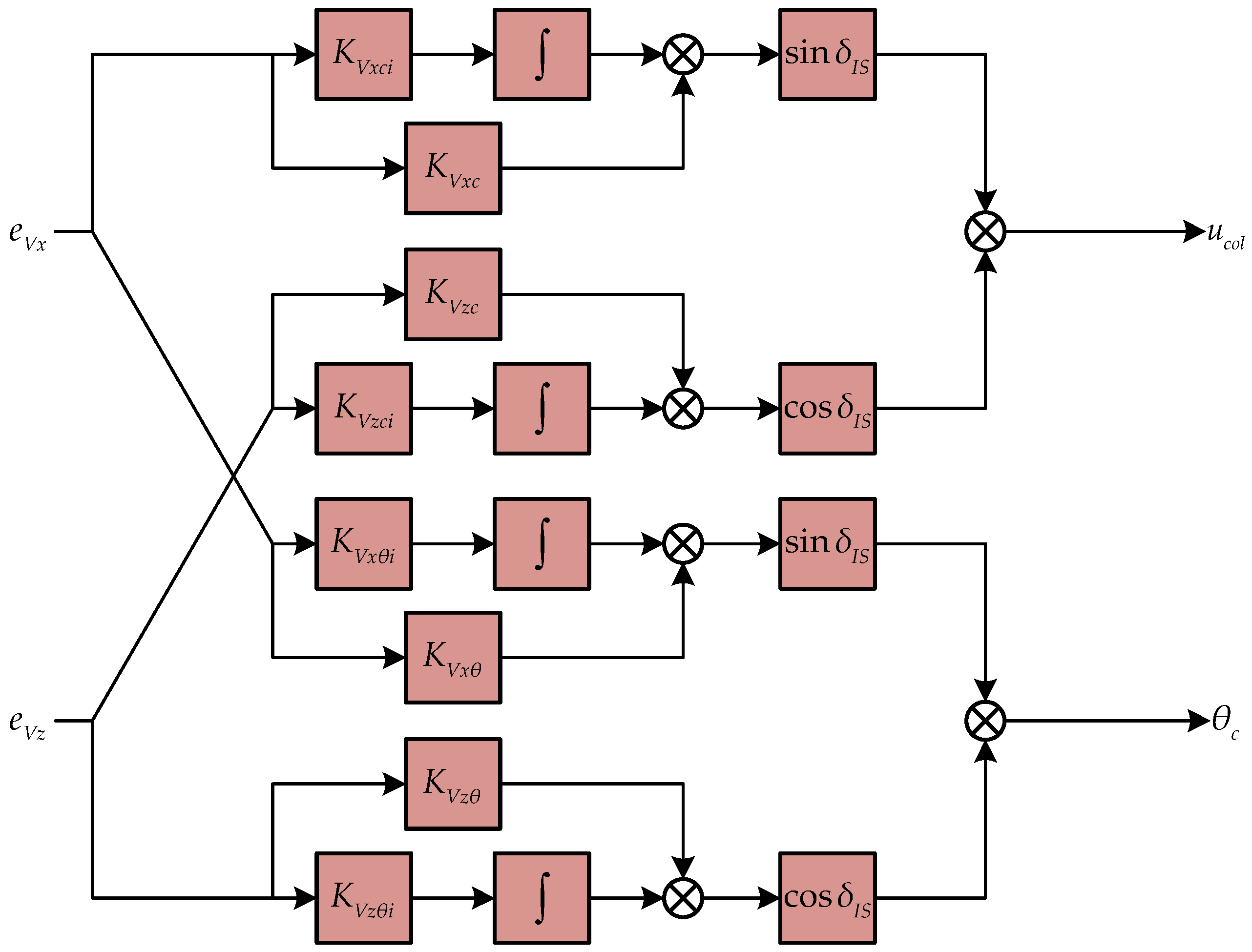
3.2. Mode-Conversion Controller and Forward/Vertical Speed Decoupling
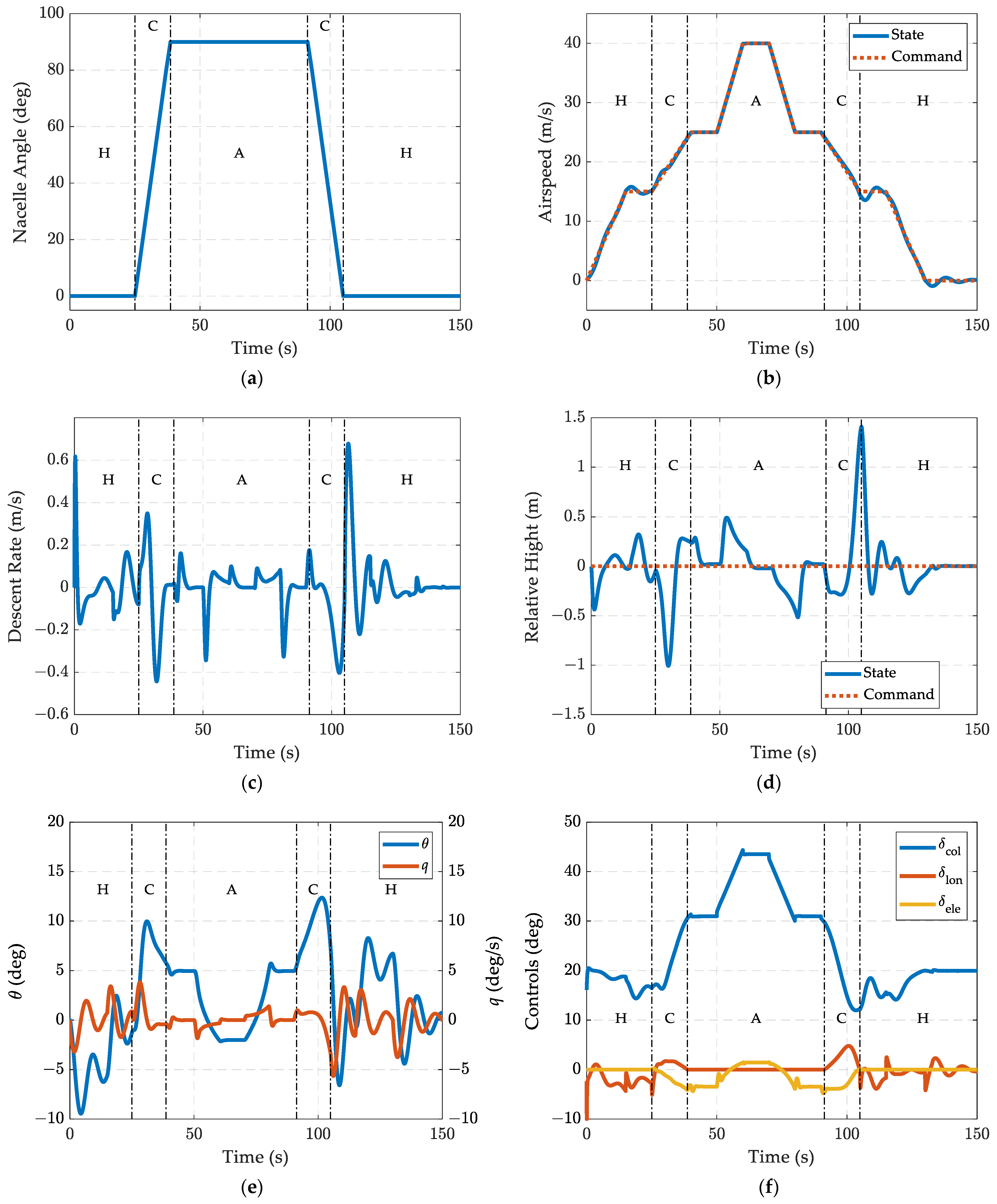
3.3. Simulation of the Mode-Conversion Flight
4. Fault-Tolerant Flight Control Design
4.1. Multi-Model Switching Adaptive Control for Predictable Faults
4.1.1. Fault Model and Controller Set
4.1.2. Reference Model Performance Index of the Supervisory Mechanism
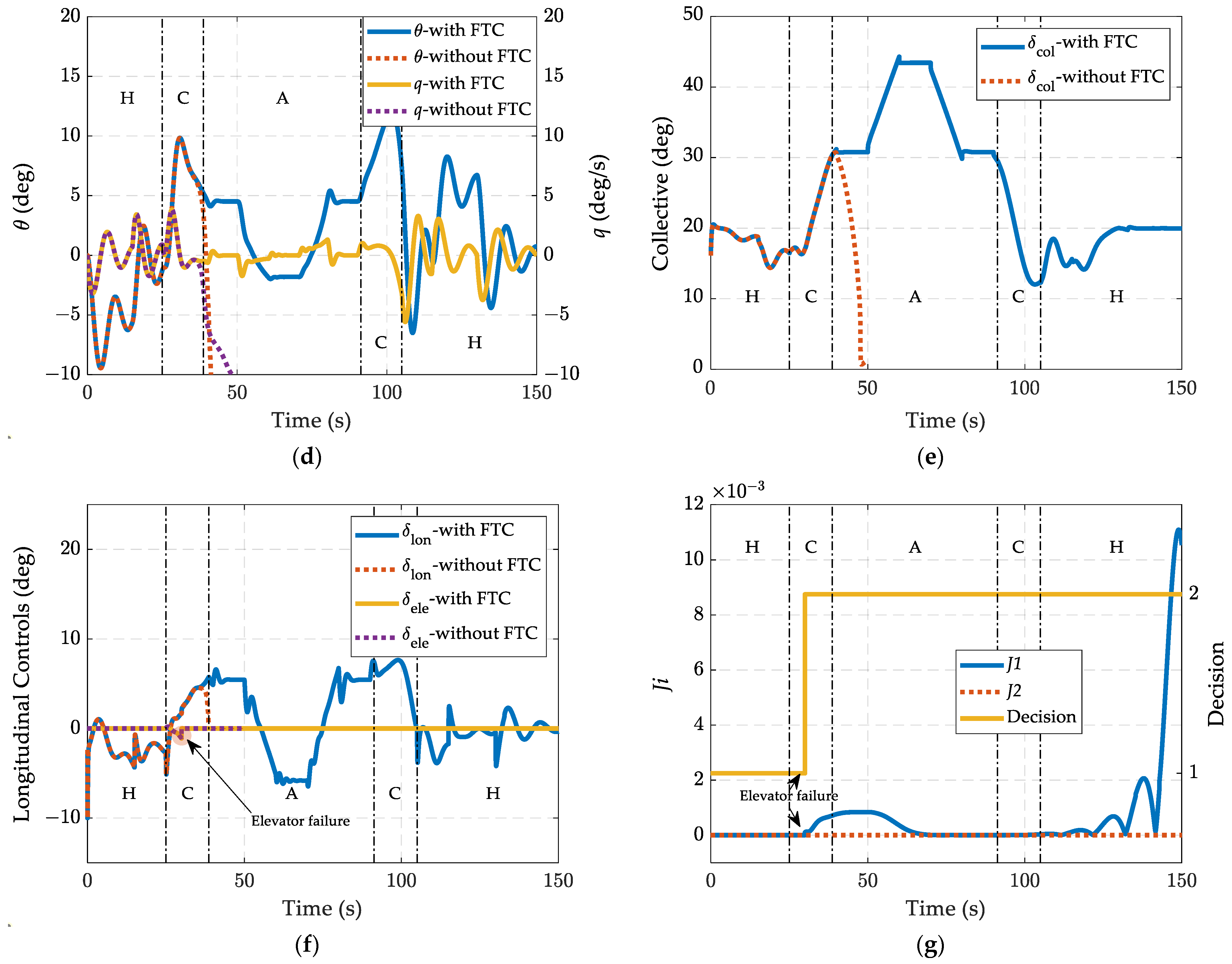
4.1.3. Mode-Conversion Flight Simulation under Predictable Fault Condition
4.2. Direct Adaptive FTC for Unpredictable Faults
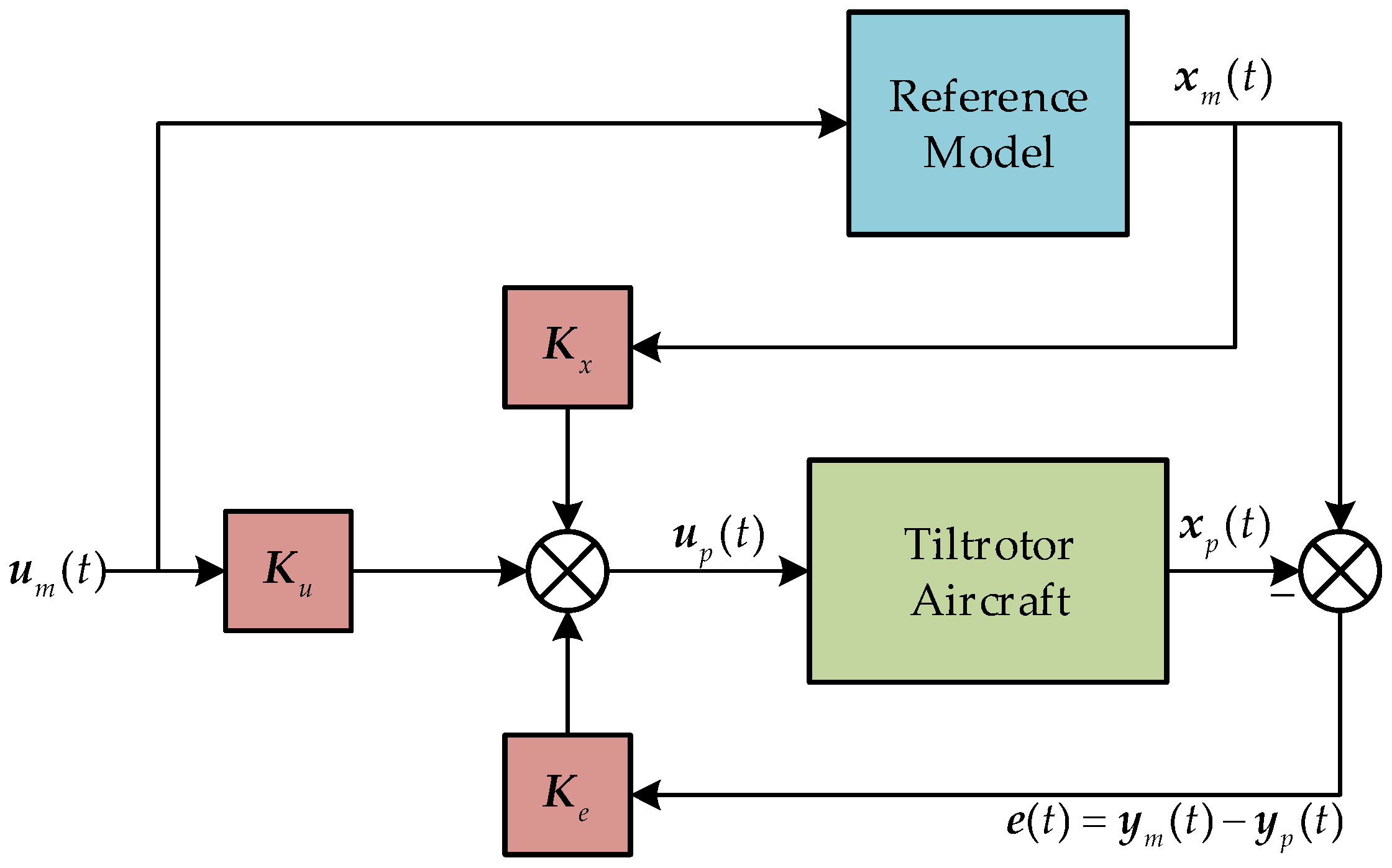
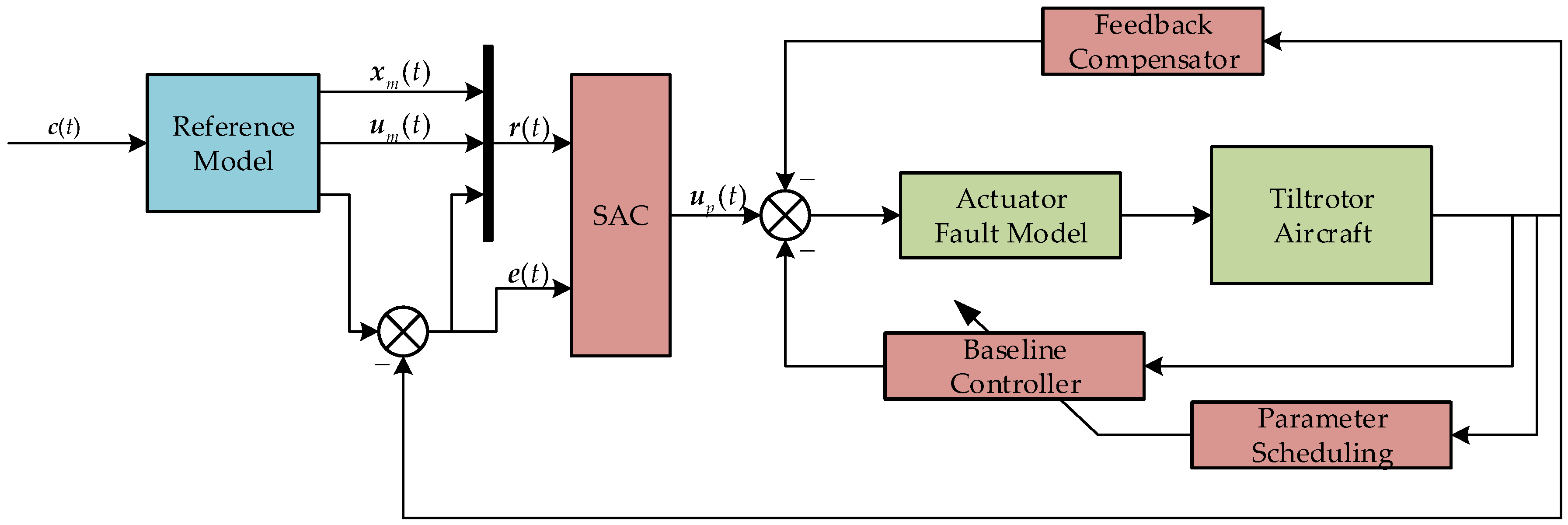
4.2.1. Direct Adaptive Control for Unpredictable Faults
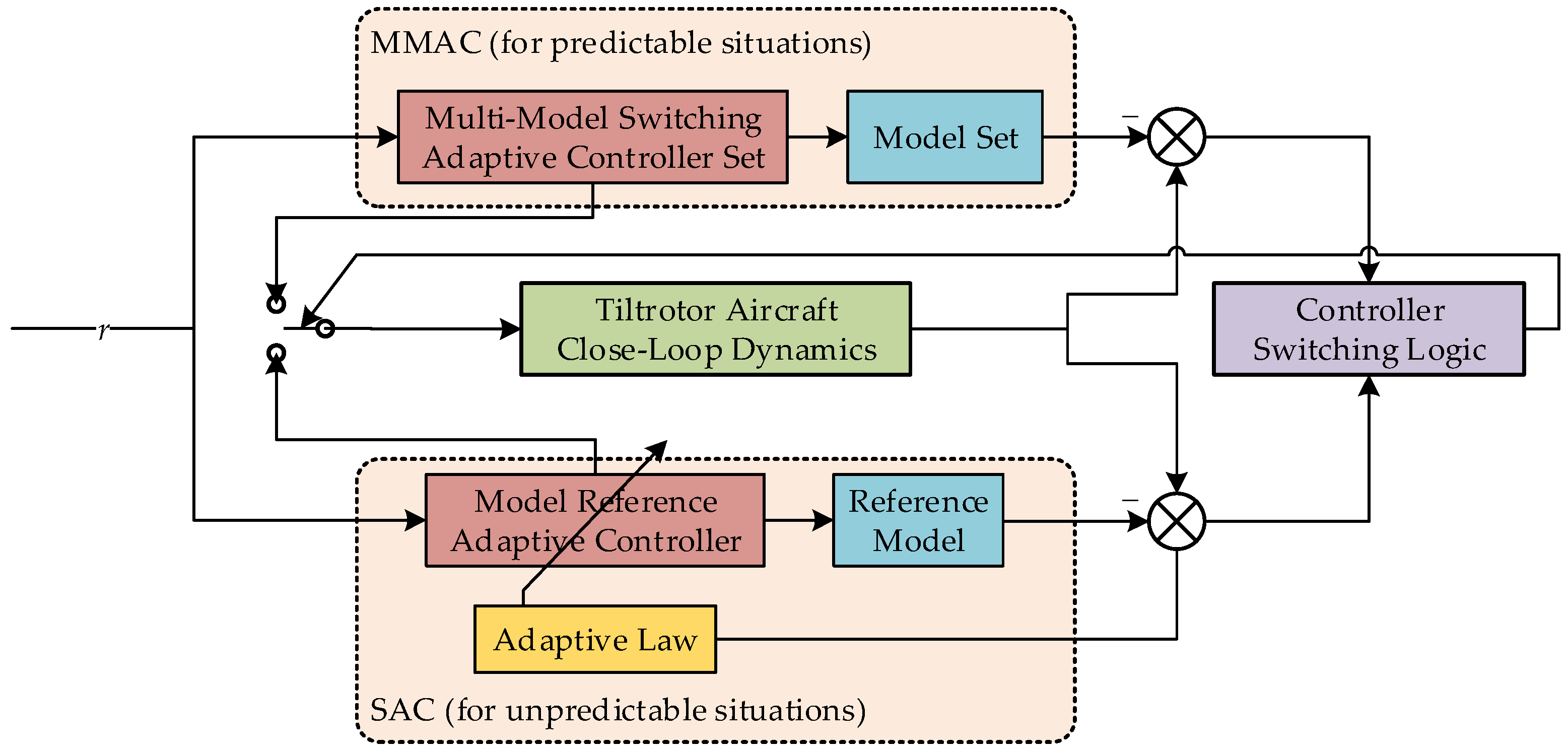
4.2.2. Hybrid Control Scheme for Tiltrotor Aircraft Control Law Reconfiguration
- The model set of the MMAC scheme is derived a priori, and controllers are also designed for each of the failure models to maintain the flight performance to the maximum extent. When the actuator floating or saturation at minimum or maximum position occurs, the MMAC controller is switched to by the online system switching logic. Through the comparison of the actual aircraft states and each of the failure model states, the supervisory mechanism of the MMAC controller will allocate the control authority to one of the MMAC controllers corresponding to the proper fault model.
- When the aircraft encounters a failure such as control surface damage and stuck, the switching logic may not match the current fault plant to any of the modeled failures. In this case, the SAC controller for unpredictable faults is activated. Utilizing the direct adaptive methodology, the aircraft is forced to track the reference model and does not need any pre-established actuator failure model.
4.2.3. Simulation
5. Conclusions and Discussion
- (1)
- For the baseline controller under normal situations, an inner angular rate loop controller is adopted based on the model inversion technique. Outer attitude and velocity loops are designed considering the decoupling of the height/velocity channel. During model conversion flight simulation, the aircraft is able to track the velocity command and thus the prescribed conversion path with ignorable static error. The maximum height loss during conversion is no more than 2 m. Simulation results have shown good performance of the full-envelope controller of the healthy system.
- (2)
- Predictable flight control law reconfiguration strategy is derived based on a multiple-model switching adaptive control scheme, which is the inner loop controller of the layered hybrid direct adaptive reconfigurable controller. The possible actuator faults of tiltrotor aircraft are analyzed and fault modeling is carried out. The controller of the fault model is designed and the recognition of the predictable fault and the smooth switching of the controller are implemented by using the appropriate performance index and the switching logic of the controller. Simulation is performed, taking the elevator floating as an example of a predictable fault. The elevator floating fault is injected into the system during the late phase of the conversion mode to verify the effectiveness of the MMAC-FTC. Results show that the presented scheme can detect the fault rapidly and switch to the corresponding controller. Performance during conversion can be recovered, and the aircraft is able to track the conversion path with a minimum height loss similar to that of the healthy plant.
- (3)
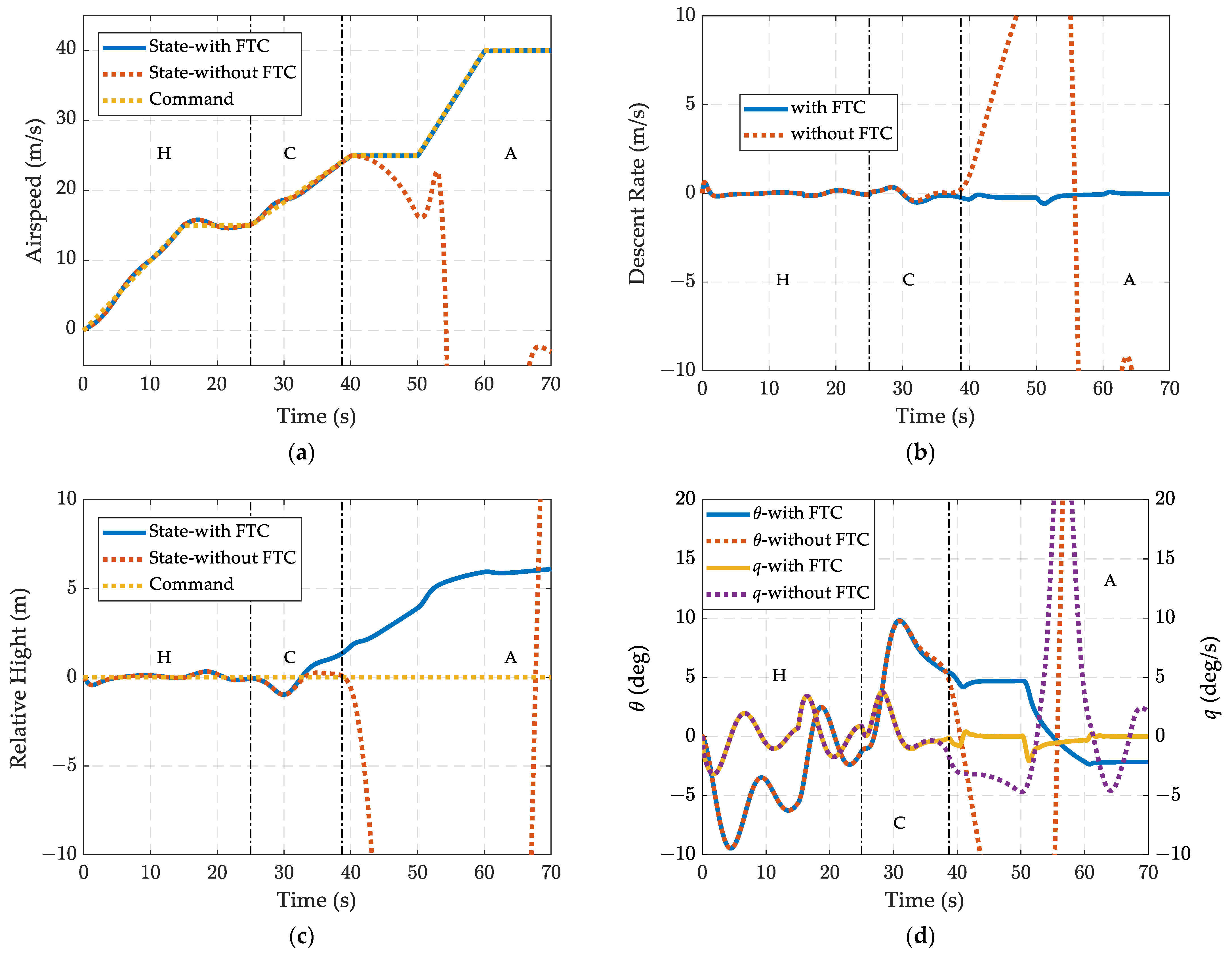
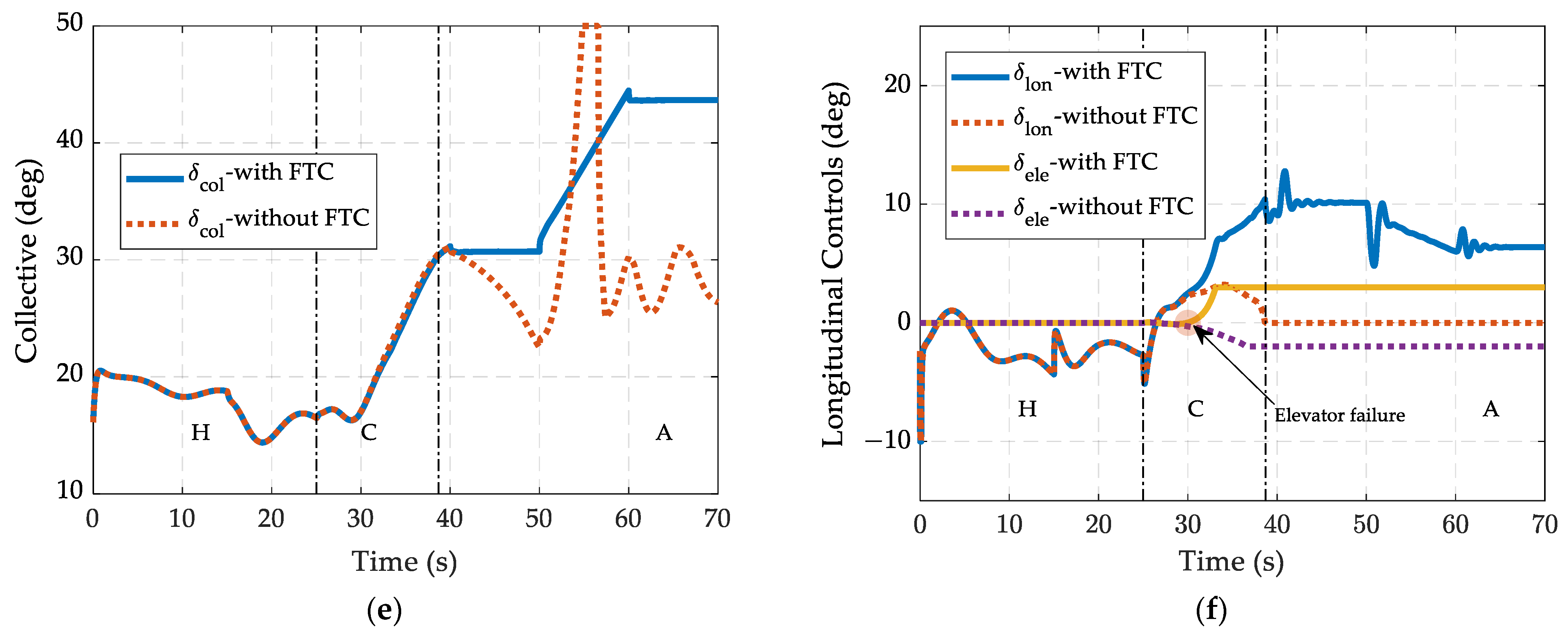
- The outer layer of the hybrid adaptive scheme is derived by simple adaptive control. Under unpredictable fault conditions, the degree of damage cannot be modeled a priori. Thus, a reference model of the healthy aircraft is prescribed. The fault plant is forced to track the state trajectory of the healthy reference model, as long as there is sufficient surplus control effectiveness. Simulation is performed under the condition of 80% elevator damage during the late stage of conversion. Results show that the fault can be detected and the controller is able to stabilize the aircraft and complete the conversion phase. Although performance reduction indeed exists as evidenced by a much larger height variation than in a healthy case, the aircraft can still track the correct conversion path.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rysdyk, R.T.; Calise, A.J. Adaptive Model Inversion Flight Control for Tilt-Rotor Aircraft. J. Guid. Control Dyn. 2012, 22, 402–407. [Google Scholar] [CrossRef]
- D’Intino, G.; Pollini, L.; Buelthoff, H.H. A 2-DoF Helicopter Haptic Support System based on Pilot Intent Estimation with Neural Networks. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Swinney, C.J.; Woods, J.C. Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction. Aerospace 2021, 8, 79. [Google Scholar] [CrossRef]
- Wada, D.; Araujo-Estrada, S.A.; Windsor, S. Unmanned Aerial Vehicle Pitch Control under Delay Using Deep Reinforcement Learning with Continuous Action in Wind Tunnel Test. Aerospace 2021, 8, 258. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Y.; Liu, M.; Yang, M.; Liang, H. A Real-Time Trajectory Optimization Method for Hypersonic Vehicles Based on a Deep Neural Network. Aerospace 2022, 9, 188. [Google Scholar] [CrossRef]
- Jiang, B.; Li, B.; Zhou, W.; Lo, L.-Y.; Chen, C.-K.; Wen, C.-Y. Neural Network Based Model Predictive Control for a Quadrotor UAV. Aerospace 2022, 9, 460. [Google Scholar] [CrossRef]
- Francesco, G.D.; D’Amato, E.; Mattei, M. Incremental Nonlinear Dynamic Inversion and Control Allocation for a Tilt Rotor UAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, ML, USA, 13–17 January 2014. [Google Scholar]
- Gruenwald, B.C.; Bryson, J. Direct Uncertainty Minimization Adaptive Control for a Guided Projectile. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021. [Google Scholar] [CrossRef]
- Gruenwald, B.C.; Yucelen, T.; Muse, J.A. Direct Uncertainty Minimization in Model Reference Adaptive Control: Experimental Results. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Mooij, E. Simple Adaptive Control System Design Trades, AIAA 2017-1502. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Hsu, M.W.; Liu, H. Design of a Nonlinear Hierarchical Adaptive Controller for a Novel Tilt-Rotor VTOL AquaUAV. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021. [Google Scholar] [CrossRef]
- Ma, X.; Dong, W.; Li, B. A Novel RFDI-FTC System for Thrust-Vectoring Aircraft Undergoing Control Surface Damage and Actuator Faults During Supermaneuverable Flight. IEEE Access 2019, 7, 156374–156385. [Google Scholar] [CrossRef]
- Lu, B.; Ma, J.; Zheng, Z. Adaptive Closed-Loop Control Allocation-Based Fault Tolerant Flight Control for an Overactuated Aircraft. IEEE Access 2019, 7, 179505–179516. [Google Scholar] [CrossRef]
- Cui, Y.; Li, A.; Meng, X. A fault-tolerant control method for distributed flight control system facing wing damage. J. Syst. Eng. Electron. 2021, 32, 1041–1052. [Google Scholar]
- Park, H.; Kim, Y. Adaptive Fault Tolerant Flight Control for Input Redundant Systems Using a Nonlinear Reference Model. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3337–3356. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B. PID-type fault-tolerant prescribed performance control of fixed-wing UAV. J. Syst. Eng. Electron. 2021, 32, 1053–1061. [Google Scholar] [CrossRef]
- Sun, R.; Shan, A.; Zhang, C.; Wu, J.; Jia, Q. Quantized Fault-Tolerant Control for Attitude Stabilization with Fixed-Time Disturbance Observer. J. Guid. Control Dyn. 2021, 44, 449–455. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y. Adaptive Fault-Tolerant Control Allocation of an Over-actuated Hybrid Fixed-wing UAV. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Yan, K.; Chen, M.; Wu, Q.; Zhu, R. Robust adaptive compensation control for unmanned autonomous helicopter with input saturation and actuator faults. Chin. J. Aeronaut. 2019, 32, 2299–2310. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; Castillo, P.; Sorcia-Vazquez, F.D.J.; Rumbo-Morales, J.Y.; Brizuela-Mendoza, J.A.; De La Cruz-Soto, J.; Martinez-Garcia, M. Fault Estimation and Fault Tolerant Control Strategies Applied to VTOL Aerial Vehicles with Soft and Aggressive Actuator Faults. IEEE Access 2020, 8, 10649–10661. [Google Scholar] [CrossRef]
- Chung, W.; Son, H. Fault-Tolerant Control of Multirotor UAVs by Control Variable Elimination. IEEE/ASME Trans. Mechatron. 2020, 25, 2513–2522. [Google Scholar] [CrossRef]
- Sun, S.; Wang, X.; Chu, Q.; de Visser, C. Incremental Nonlinear Fault-Tolerant Control of a Quadrotor with Complete Loss of Two Opposing Rotors. IEEE Trans. Robot. 2021, 37, 116–130. [Google Scholar] [CrossRef]
- Thanaraj, T.; Ng, B.F.; Low, K.H. Active Fault Tolerant Control on Multi-rotor UAVs using ELM-based Neuro-Fuzzy System. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June 27–1 July 2022. [Google Scholar]
- Wang, B.; Zhu, D.; Han, L.; Gao, H.; Gao, Z.; Zhang, Y. Adaptive Fault-Tolerant Control of a Hybrid Canard Rotor/Wing UAV Under Transition Flight Subject to Actuator Faults and Model Uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4559–4574. [Google Scholar] [CrossRef]
- Ahmed, I.; Quinones-Grueiro, M.; Biswas, G. Adaptive fault-tolerant control of octo-rotor UAV under motor faults in adverse wind conditions. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Beyer, Y.; Steen, M.; Hecker, P. Incremental Passive Fault-Tolerant Control for Quadrotors Subjected to Complete Rotor Failures. J. Guid. Control Dyn. 2023, 46, 2033–2042. [Google Scholar] [CrossRef]
- Du, Y.; Huang, P.; Cheng, Y.; Fan, Y.; Yuan, Y. Fault Tolerant Control of a Quadrotor Unmanned Aerial Vehicle Based on Active Disturbance Rejection Control and Two-Stage Kalman Filter. IEEE Access 2023, 11, 67556–67566. [Google Scholar] [CrossRef]
- Lee, H.; Kim, J.; Kim, S.; Kim, M.; Kim, Y. Local Strong Accessibility Analysis and Fault-Tolerant Control of Multicopter Considering Actuator Failures. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Anderson, B.D.O.; Brinsmead, T.S.; Bruyne, F.D.; Hespanha, J.; Liberzon, D.; Morse, A.S. Multiple model adaptive control. Part 1: Finite controller coverings. Int. J. Robust Nonlinear Control 2000, 10, 909–929. [Google Scholar] [CrossRef]
- Kaufman, H.; Barkana, I.; Sobel, K. Direct Adaptive Control Algorithms: Theory and Applications, 2nd ed.; Springer-Verlag: New York, NY, USA, 1998. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forward/Vertical | Lateral | Longitudinal | Heading | |
|---|---|---|---|---|
| Helicopter mode | ||||
| Conversion mode | ||||
| Airplane mode |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, J.; Song, Y.; Wang, H.; Han, D.; Yang, C. Hybrid Adaptive Control for Tiltrotor Aircraft Flight Control Law Reconfiguration. Aerospace 2023, 10, 1001. https://doi.org/10.3390/aerospace10121001
Wen J, Song Y, Wang H, Han D, Yang C. Hybrid Adaptive Control for Tiltrotor Aircraft Flight Control Law Reconfiguration. Aerospace. 2023; 10(12):1001. https://doi.org/10.3390/aerospace10121001
Chicago/Turabian StyleWen, Jiayu, Yanguo Song, Huanjin Wang, Dong Han, and Changfa Yang. 2023. "Hybrid Adaptive Control for Tiltrotor Aircraft Flight Control Law Reconfiguration" Aerospace 10, no. 12: 1001. https://doi.org/10.3390/aerospace10121001
APA StyleWen, J., Song, Y., Wang, H., Han, D., & Yang, C. (2023). Hybrid Adaptive Control for Tiltrotor Aircraft Flight Control Law Reconfiguration. Aerospace, 10(12), 1001. https://doi.org/10.3390/aerospace10121001