
A Pattern Search Method to Optimize Mars Exploration Trajectories



Abstract
1. Introduction
2. Infrastructure for Mars Exploration
2.1. Naro Space Center and KSLV-II
2.2. Eco-Friendly Hypergolic Propulsion System
2.3. Korea Deep Space Antenna
3. Problem Description
3.1. Solution of Lambert’s Problem
3.2. Mars Exploration Scenario
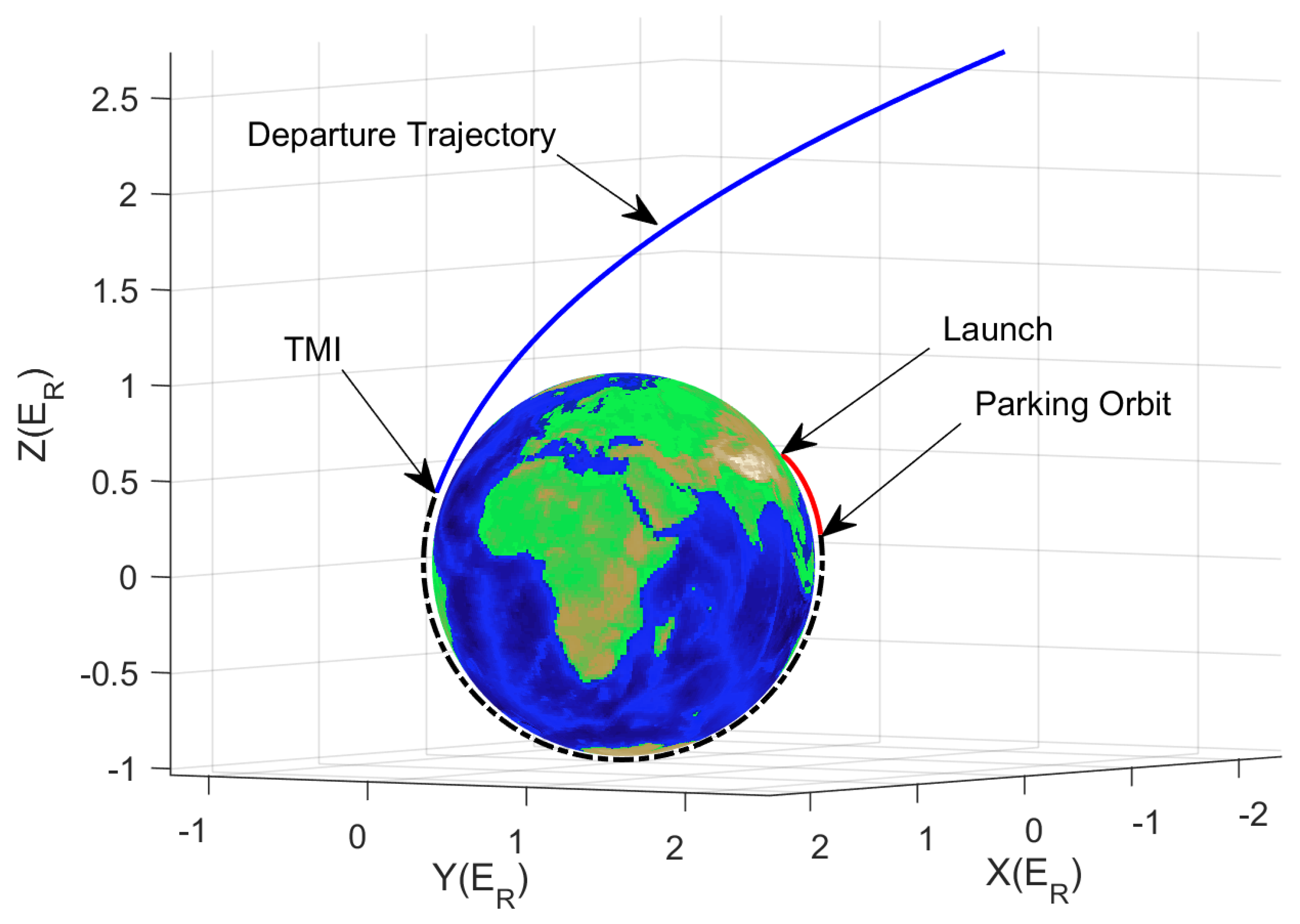
3.2.1. Earth Departure Phase
3.2.2. Mars Transfer Phase
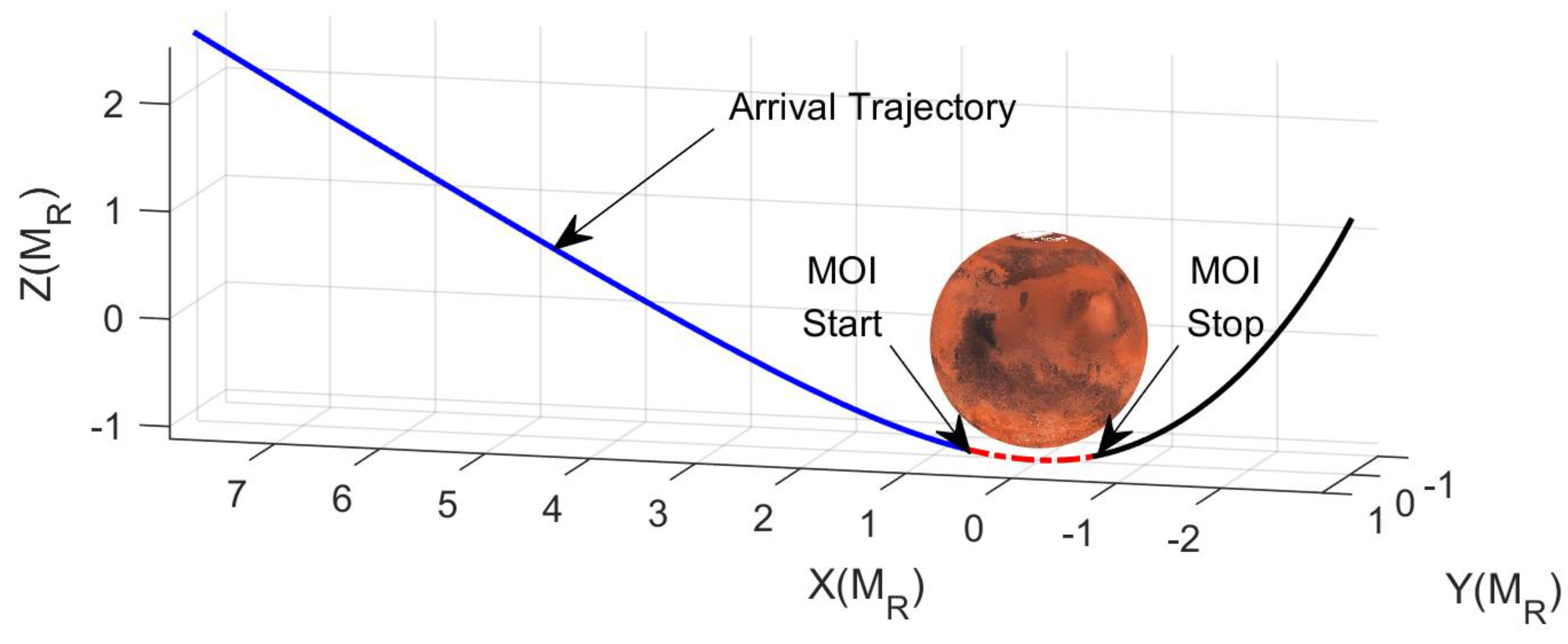
3.2.3. Mars Orbit Insertion Phase
3.3. Dynamic and Propagation Models
3.4. Differential Corrections Process
3.5. Pattern Search Method
3.5.1. Pattern and Mesh
3.5.2. Poll and Search Method
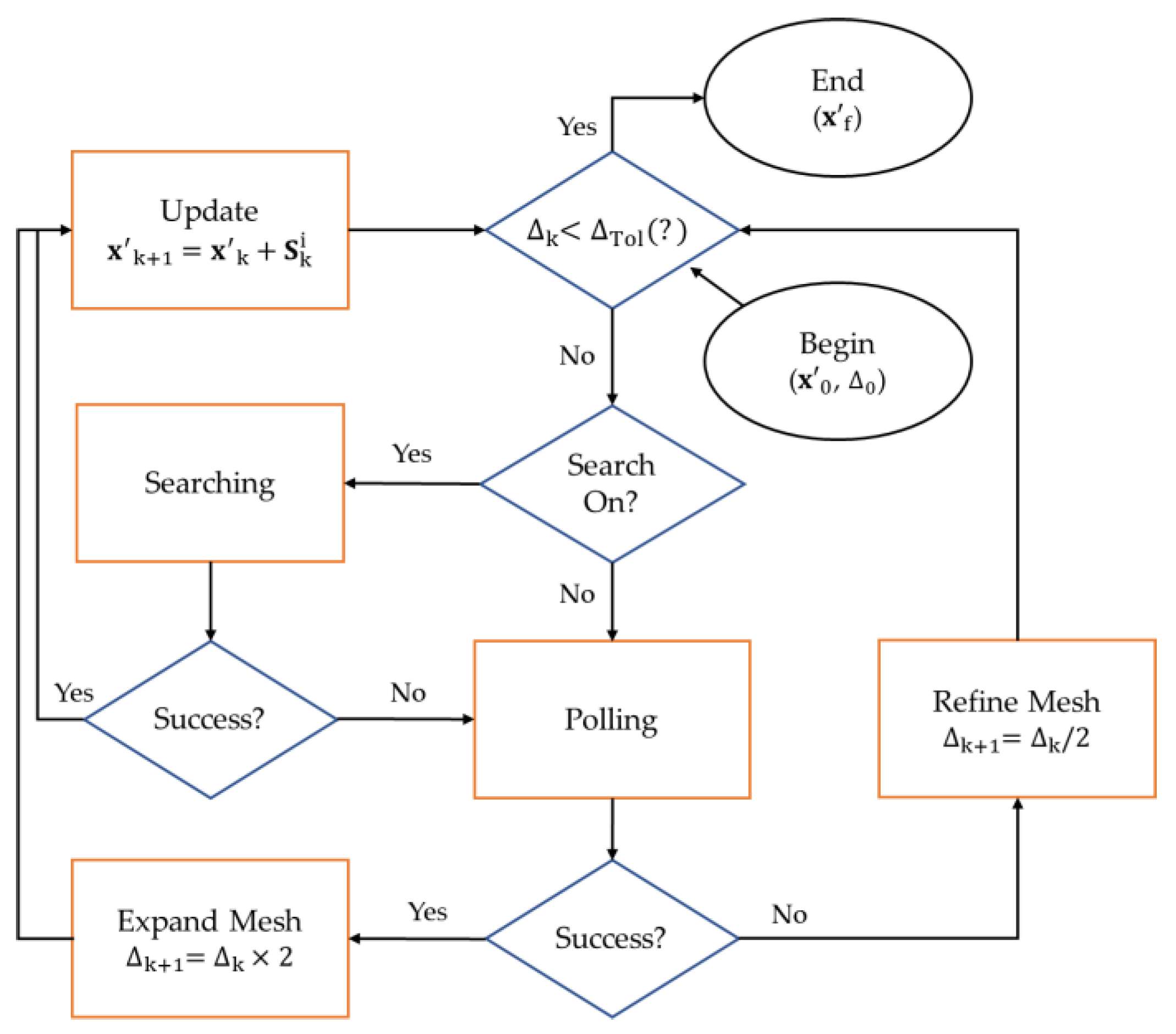
3.5.3. Pattern Search Flowchart
3.6. Optimization Problem Formulation
4. Numerical Simulation Results and Discussion
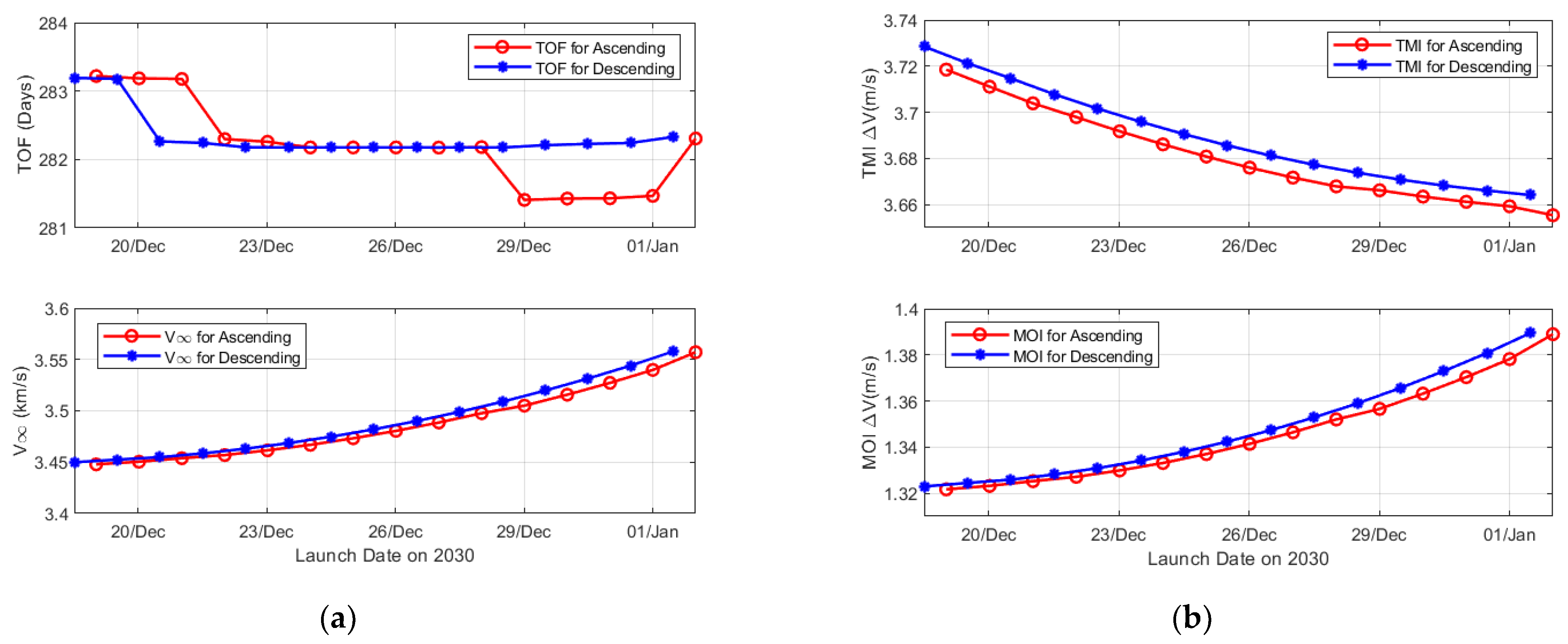
4.1. Results of Global Optimization Problem
4.2. Mass Estimation of the Upper Stage and the Mars Explorer
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | (UTC) | (min) | (UTC) | (km/s) | (km2/s2) | (deg) | (deg) |
|---|---|---|---|---|---|---|---|
| 1 | 19 Dec, 2030 00:30:55 | 52.72 | 19 Dec, 2030 01:33:38 | 3.718 | 11.610 | 227.94 | 11.44 |
| 2 | 20 Dec, 2030 00:28:42 | 52.53 | 20 Dec, 2030 01:31:14 | 3.711 | 11.442 | 228.28 | 11.97 |
| 3 | 21 Dec, 2030 00:26:17 | 52.35 | 21 Dec, 2030 01:28:38 | 3.704 | 11.279 | 228.56 | 12.47 |
| 4 | 22 Dec, 2030 00:23:57 | 52.11 | 22 Dec, 2030 01:26:04 | 3.698 | 11.145 | 228.82 | 13.27 |
| 5 | 23 Dec, 2030 00:21:33 | 51.93 | 23 Dec, 2030 01:23:29 | 3.692 | 11.007 | 229.11 | 13.78 |
| 6 | 24 Dec, 2030 00:19:08 | 51.75 | 24 Dec, 2030 01:20:53 | 3.686 | 10.879 | 229.39 | 14.32 |
| 7 | 25 Dec, 2030 00:16:38 | 51.58 | 25 Dec, 2030 01:18:13 | 3.681 | 10.760 | 229.65 | 14.85 |
| 8 | 26 Dec, 2030 00:14:04 | 51.41 | 26 Dec, 2030 01:15:29 | 3.676 | 10.652 | 229.89 | 15.38 |
| 9 | 27 Dec, 2030 00:11:26 | 51.24 | 27 Dec, 2030 01:12:40 | 3.672 | 10.556 | 230.12 | 15.92 |
| 10 | 28 Dec, 2030 00:08:44 | 51.07 | 28 Dec, 2030 01:09:49 | 3.668 | 10.470 | 230.33 | 16.46 |
| 11 | 29 Dec, 2030 00:06:10 | 50.83 | 29 Dec, 2030 01:07:00 | 3.666 | 10.434 | 230.49 | 17.39 |
| 12 | 30 Dec, 2030 00:03:24 | 50.67 | 30 Dec, 2030 01:04:04 | 3.663 | 10.373 | 230.68 | 17.93 |
| 13 | 31 Dec, 2030 00:00:36 | 50.51 | 31 Dec, 2030 01:01:06 | 3.661 | 10.322 | 230.86 | 18.48 |
| 14 | 31 Dec, 2030 23:57:47 | 50.36 | 01 Jan, 2031 00:58:08 | 3.659 | 10.279 | 231.03 | 19.01 |
| 15 | 01 Jan, 2031 23:54:44 | 50.31 | 02 Jan, 2031 00:55:03 | 3.655 | 10.192 | 231.24 | 19.07 |
| No. | (Days) | (Days) | (UTC) | (min) | (km/s) | (km/s) | (deg) | (deg) |
|---|---|---|---|---|---|---|---|---|
| 1 | 283.22 | 282.33 | 28 Sep, 2031 05:15:55 | 12.85 | 1.322 | 3.448 | 0.58 | −29.88 |
| 2 | 283.19 | 282.33 | 29 Sep, 2031 04:27:31 | 12.87 | 1.323 | 3.450 | 0.60 | −30.28 |
| 3 | 283.18 | 282.33 | 30 Sep, 2031 04:14:42 | 12.88 | 1.325 | 3.454 | 0.61 | −30.67 |
| 4 | 282.30 | 282.33 | 30 Sep, 2031 07:09:39 | 12.90 | 1.327 | 3.457 | 1.12 | −31.09 |
| 5 | 282.26 | 282.33 | 01 Oct, 2031 06:12:44 | 12.92 | 1.330 | 3.461 | 1.14 | −31.51 |
| 6 | 282.18 | 282.33 | 02 Oct, 2031 04:13:11 | 12.94 | 1.333 | 3.467 | 1.18 | −31.92 |
| 7 | 282.18 | 282.33 | 03 Oct, 2031 04:12:28 | 12.97 | 1.337 | 3.473 | 1.17 | −32.33 |
| 8 | 282.18 | 282.33 | 04 Oct, 2031 04:13:11 | 13.01 | 1.341 | 3.480 | 1.16 | −32.75 |
| 9 | 282.17 | 282.33 | 05 Oct, 2031 04:10:20 | 13.04 | 1.346 | 3.489 | 1.14 | −33.16 |
| 10 | 282.18 | 282.33 | 06 Oct, 2031 04:20:18 | 13.09 | 1.352 | 3.498 | 1.13 | −33.57 |
| 11 | 281.41 | 282.33 | 06 Oct, 2031 09:48:56 | 13.12 | 1.357 | 3.505 | 1.56 | −34.07 |
| 12 | 281.43 | 282.33 | 07 Oct, 2031 10:18:05 | 13.17 | 1.363 | 3.516 | 1.54 | −34.49 |
| 13 | 281.43 | 282.33 | 08 Oct, 2031 10:23:04 | 13.23 | 1.370 | 3.527 | 1.52 | −34.91 |
| 14 | 281.47 | 282.33 | 09 Oct, 2031 11:14:18 | 13.29 | 1.378 | 3.540 | 1.49 | −35.32 |
| 15 | 282.31 | 282.33 | 11 Oct, 2031 07:21:01 | 13.37 | 1.389 | 3.557 | 0.99 | −35.58 |
| No. | (UTC) | (min) | (UTC) | (km/s) | (km2/s2) | (deg) | (deg) |
|---|---|---|---|---|---|---|---|
| 1 | 18 Dec, 2030 12:16:34 | 103.69 | 18 Dec, 2030 14:10:15 | 3.728 | 11.736 | 227.80 | 11.19 |
| 2 | 19 Dec, 2030 12:13:45 | 103.78 | 19 Dec, 2030 14:07:32 | 3.721 | 11.569 | 228.18 | 11.73 |
| 3 | 20 Dec, 2030 12:10:12 | 103.95 | 20 Dec, 2030 14:04:09 | 3.715 | 11.416 | 228.44 | 12.59 |
| 4 | 21 Dec, 2030 12:06:53 | 104.03 | 21 Dec, 2030 14:00:55 | 3.708 | 11.258 | 228.69 | 13.08 |
| 5 | 22 Dec, 2030 12:03:43 | 104.11 | 22 Dec, 2030 13:57:49 | 3.702 | 11.115 | 228.97 | 13.56 |
| 6 | 23 Dec, 2030 12:00:36 | 104.19 | 23 Dec, 2030 13:54:47 | 3.696 | 10.982 | 229.27 | 14.04 |
| 7 | 24 Dec, 2030 11:57:25 | 104.27 | 24 Dec, 2030 13:51:41 | 3.691 | 10.859 | 229.55 | 14.54 |
| 8 | 25 Dec, 2030 11:54:07 | 104.37 | 25 Dec, 2030 13:48:29 | 3.686 | 10.745 | 229.81 | 15.07 |
| 9 | 26 Dec, 2030 11:50:44 | 104.47 | 26 Dec, 2030 13:45:12 | 3.681 | 10.643 | 230.05 | 15.59 |
| 10 | 27 Dec, 2030 11:47:16 | 104.58 | 27 Dec, 2030 13:41:50 | 3.677 | 10.552 | 230.27 | 16.12 |
| 11 | 28 Dec, 2030 11:43:44 | 104.69 | 28 Dec, 2030 13:38:25 | 3.674 | 10.472 | 230.47 | 16.66 |
| 12 | 29 Dec, 2030 11:40:11 | 104.80 | 29 Dec, 2030 13:34:59 | 3.671 | 10.401 | 230.67 | 17.17 |
| 13 | 30 Dec, 2030 11:36:36 | 104.91 | 30 Dec, 2030 13:31:30 | 3.668 | 10.341 | 230.85 | 17.69 |
| 14 | 31 Dec, 2030 11:32:59 | 105.02 | 31 Dec, 2030 13:28:00 | 3.666 | 10.290 | 231.04 | 18.21 |
| 15 | 01 Jan, 2031 11:29:24 | 105.13 | 01 Jan, 2031 13:24:32 | 3.664 | 10.244 | 231.22 | 18.68 |
| No. | (Days) | (Days) | (UTC) | (min) | (km/s) | (km/s) | (deg) | (deg) |
|---|---|---|---|---|---|---|---|---|
| 1 | 283.19 | 282.33 | 28 Sep, 2031 04:37:10 | 12.86 | 1.323 | 3.450 | 0.33 | −29.85 |
| 2 | 283.18 | 282.33 | 29 Sep, 2031 04:16:16 | 12.88 | 1.324 | 3.452 | 0.34 | −30.24 |
| 3 | 282.26 | 282.33 | 29 Sep, 2031 06:19:43 | 12.89 | 1.326 | 3.455 | 0.87 | −30.64 |
| 4 | 282.24 | 282.33 | 30 Sep, 2031 05:47:54 | 12.90 | 1.328 | 3.459 | 0.89 | −31.05 |
| 5 | 282.18 | 282.33 | 01 Oct, 2031 04:16:25 | 12.92 | 1.331 | 3.463 | 0.92 | −31.45 |
| 6 | 282.18 | 282.33 | 02 Oct, 2031 04:12:26 | 12.95 | 1.334 | 3.469 | 0.92 | −31.86 |
| 7 | 282.18 | 282.33 | 03 Oct, 2031 04:12:26 | 12.98 | 1.338 | 3.475 | 0.91 | −32.27 |
| 8 | 282.17 | 282.33 | 04 Oct, 2031 04:11:56 | 13.01 | 1.342 | 3.482 | 0.90 | −32.68 |
| 9 | 282.17 | 282.33 | 05 Oct, 2031 04:10:57 | 13.05 | 1.347 | 3.490 | 0.89 | −33.08 |
| 10 | 282.18 | 282.33 | 06 Oct, 2031 04:12:26 | 13.09 | 1.353 | 3.499 | 0.87 | −33.49 |
| 11 | 282.17 | 282.33 | 07 Oct, 2031 04:11:56 | 13.14 | 1.359 | 3.509 | 0.86 | −33.89 |
| 12 | 282.21 | 282.33 | 08 Oct, 2031 05:00:10 | 13.19 | 1.366 | 3.520 | 0.83 | −34.29 |
| 13 | 282.23 | 282.33 | 09 Oct, 2031 05:28:01 | 13.25 | 1.373 | 3.531 | 0.81 | −34.69 |
| 14 | 282.24 | 282.33 | 10 Oct, 2031 05:47:55 | 13.31 | 1.381 | 3.544 | 0.79 | −35.09 |
| 15 | 282.33 | 282.33 | 11 Oct, 2031 07:55:12 | 13.37 | 1.390 | 3.558 | 0.73 | −35.47 |
References
- South Korean Ministry of Science and ICT. Fourth Space Development Promotion Basic Plan. Available online: https://english.khan.co.kr/khan_art_view.html?artid=202212221752047&code=710100 (accessed on 22 December 2022).
- Halsell, C.A.; Bowes, A.L.; Johnston, M.D.; Lyons, D.T.; Lock, R.E.; Xaypraseuth, P.; Bhaskaran, S.; Highsmith, D.E.; Jah, M.K. Trajectory design for the Mars reconnaissance orbiter mission. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Ponce, Puerto Rico, USA, 9–13 February 2003. [Google Scholar]
- Folta, D.; Demcak, S.; Young, B.; Berry, K. Transfer trajectory design for the Mars atmosphere and volatile evolution (MAVEN) mission. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Kauai, HI, USA, 10–14 February 2013. [Google Scholar]
- Schmidt, R. Mars express-ESA’s first mission to planet Mars. Acta Astronaut. 2003, 52, 197–202. [Google Scholar] [CrossRef]
- Long, S.; Lyons, D.; Guinn, J.; Lock, R. ExoMars/TGO Science Orbit Design. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Sundararajan, V. Mangalyaan–Overview and technical architecture of Inian’s first interplanetary mission to Mars. In Proceedings of the AIAA Space 2013 Conference and Exposition, San Diego, CA, USA, 10–12 September 2013. [Google Scholar]
- Alrais, A.; Bester, M.; Stroozas, B.; Alloghani, M. Emirates Mars mission–Al Amal Overview. In Proceedings of the SpaceOps Conferences, Daejeon, Republic of Korea, 16–20 May 2016. [Google Scholar]
- Ye, P.; Sun, Z.; Rao, W.; Meng, L. Mission overview and key technologies of the first Mars probe of China. Sci. China Technol. Sci. 2017, 60, 649–657. [Google Scholar] [CrossRef]
- Gooding, R.H. A procedure for the solution of Lambert’s orbital boundary-value problem. Celest. Mech. Dyn. Astron. 1990, 48, 145–165. [Google Scholar] [CrossRef]
- Sellers, J.J. Understanding Space: An Introduction to Astronautics, 2nd ed.; Mc Graw Hill: New York, NY, USA, 2005; pp. 227–248. [Google Scholar]
- Abdelkhalik, O.; Mortari, D. N-Impulse Orbit Transfer Using Genetic Algorithms. J. Spacecr. Rocket. 2007, 44, 456–460. [Google Scholar] [CrossRef]
- Vasile, M.; Summerer, L.; Pascale, P.D. Design of Earth-Mars transfer trajectories using evolutionary-branching technique. Acta Astronaut. 2005, 56, 705–720. [Google Scholar] [CrossRef][Green Version]
- Ellipson, D.H.; Conway, B.A. Analytic Gradient Computation for Bounded-Impulse Trajectory Models Using Two-Sided Shooting. J. Guid. Control. Dyn. 2018, 41, 1449–1462. [Google Scholar] [CrossRef] [PubMed]
- Miele, A.; Wang, T.; Williams, P.N. Computation of optimal Mars trajectories via combined chemical/electrical propulsion, part 1: Baseline solutions for deep interplanetary space. Acta Astronaut. 2004, 55, 95–107. [Google Scholar] [CrossRef]
- Gagg Filho, L.A.; da Silva Fernandes, S. Optimal Two-Impulse Interplanetary Trajectories: Earth-Venus and Earth-Mars Missions. Rev. Mex. Astron. Astrofís. 2023, 59, 11–43. [Google Scholar] [CrossRef]
- Izzo, D.; Sprague, C.; Tailor, D. Machine learning and evolutionary techniques in interplanetary trajectory design. In Modeling and Optimization in Space Engineering; Fasano, G., Pintér, J.D., Eds.; Springer: Berlin, Germany, 2019; pp. 191–210. [Google Scholar]
- Global Optimization Toolbox User’s Guide. Matlab, R2019a, The Mathworks Inc, Massachusetts. Available online: https://www.mathworks.com/help/gads/ (accessed on 1 March 2019).
- Kolda, T.G.; Lewis, R.M.; Torczon, V. A Generating Set Direct Search Argumented Lagrangian Algorithm for Optimization with a Combination of General and Linear Constraints; Technical Report, SAND2006-5315; Sandia National Laboratories: California, CA, USA, 2006. [Google Scholar]
- Choi, S.J.; Song, Y.J.; Bae, J.H.; Kim, E.H.; Ju, G.H. Design and analysis of Korean lunar orbiter mission using direct transfer. J. Korean Soc. Aeronaut. Space Sci. 2013, 41, 1225–1348. [Google Scholar]
- Korea Advanced Institute of Science and Technology, Feasibility Study for Korean lunar Exploration Project Step 2. Ministry of Science and ICT. Available online: https://scienceon.kisti.re.kr/srch/selectPORSrchReport.do?cn=TRKO201800006037 (accessed on 31 March 2017).
- Ko, J.; Cho, S.Y. Space Launch vehicle development in Korea aerospace research institute. In Proceedings of the SpaceOps Conferences, Daejeon, Republic of Korea, 16–20 May 2016. [Google Scholar]
- Kang, H.; Jang, D.; Kwon, S. Demonstration of 500 N scale bipropellant thruster using non-toxic hypergolic fuel and hydrogen peroxide. Aerosp. Sci. Technol. 2016, 49, 209–214. [Google Scholar] [CrossRef]
- Kang, H.; Kwon, S. Green hypergolic combination: Diethylenetriamine-based fuel and hydrogen peroxide. Acta Astronaut. 2017, 137, 25–30. [Google Scholar] [CrossRef]
- Kim, Y.R.; Song, Y.J.; Bae, J.H.; Choi, S.W. Observational arc-length effect on orbit determination for KPLO using a sequential estimation technique. J. Astron. Space Sci. 2018, 35, 295–308. [Google Scholar]
- Laura, M.; Robert, D.F.; Melissa, L.M. Interplanetary Mission Design Handbook: Earth to Mars Mission Opportunities 2026 to 2045; Clenn Research Center: Cleveland, OH, USA, 2010. [Google Scholar]
- Choi, S.J.; Carrico, J.; Loucks, M.; Lee, H.; Kwon, S. Geostationary Orbit Transfer with Lunar Gravity Assist from Non-equatorial Launch Site. J. Astronaut. Sci. 2021, 68, 1014–1033. [Google Scholar] [CrossRef]
- Long, S.M.; You, T.H.; Halsell, C.A.; Bhat, R.S.; Demcak, S.W.; Graat, E.J.; Higa, E.S.; Highsmith, D.E.; Mottinger, N.A.; Jah, M.K. Mars Reconnaissance Orbiter Aerobraking Navigation Operation. In Proceedings of the SpaceOps Conferences, Heidelberg, Germany, 12–16 May 2008. [Google Scholar]
- Berry, M.M.; Coppola, V.T. Integration of orbit trajectories in the presence of multiple full gravitational fields. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Galveston, TX, USA, 27–31 January 2008. [Google Scholar]
- Cook, G.E. Satellite drag coefficients. Planet. Space Sci. 1965, 10, 929–946. [Google Scholar] [CrossRef]
- Tolson, R.H.; Lugo, R.A.; Baird, D.T.; Cianciolo, A.D.; Bougher, S.W.; Zurek, R.M. Atmospheric modeling using accelerometer data during Mars Atmosphere and Volatile Evolution (MAVEN) flight operations. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, San Antonio, TX, USA, 5–9 February 2017. [Google Scholar]
- Berry, M.M. Comparisons between Newton-Raphson and Broyden’s methods for trajectory design problems. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, AK, USA, 31 July–4 August 2011. [Google Scholar]
- Ansys Systems Tool Kit/Astrogator, Software Package, Ver. 12.1.0. Available online: https://www.ansys.com/products/missions/ansys-stk (accessed on 13 November 2020).
- Choi, S.J.; Lee, D.; Kim, I.K.; Kwon, J.W.; Koo, C.H.; Moon, S.; Kim, C.; Min, S.Y.; Rew, D.Y. Trajectory Optimization for a lunar orbiter using a pattern search method. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2017, 231, 1325–1337. [Google Scholar] [CrossRef]
- Loucks, M.; Carrico, J.; Carrico, T.; Deiterich, C. A Comparison of Lunar Landing Trajectory Strategies using Numerical Simulations. In Proceedings of the International Lunar Conference, Toronto, ON, Canada, 18–23 September 2005. [Google Scholar]
- Sutton, G.P.; Biblarz, O. Rocket Propulsion Elements, 7th ed.; John Wiley & Sons: New York, NY, USA, 2001; pp. 102–106. [Google Scholar]
- Spencer, D.A.; Tolson, R. Aerobraking cost and risk decisions. J. Spacecr. Rocket. 2007, 42, 1285–1293. [Google Scholar] [CrossRef]














| Parameter | 1st Stage | 2nd Stage | 3rd Stage |
|---|---|---|---|
| Length | 21.6 m | 13.6 m | 3.5 m |
| Mass | 143 ton | 42.3 ton | 12.6 ton |
| Vacuum thrust | 300-tonf (75-tonf × 4) | 75-tonf | 7-tonf |
| Vacuum specific impulse | 298.5 s | 315.9 s | 326.6 s |
| Operating time | 126 s | 144 s | 500 s |
| Parameter | Value |
|---|---|
| Oxidizer | 90 wt.% H2O2 |
| Reactive fuel | Stock 2 |
| Design thrust | 500 N |
| Design chamber pressure | 30 bar |
| Ideal vacuum specific impulse () | 306.5 s |
| Ideal characteristic velocity (C*) | 1579.2 m/s |
| Theoretical oxidizer to fuel ratio | 5.48 |
| Design mass flow rate | Oxidizer: 131.4 g/s, fuel: 24.0 g/s |
| Model | Earth Departure Phase | Mars Transfer Phase | MOI Phase |
|---|---|---|---|
| Gravitational field () | WGS84-EGM96 21 × 21 | Sun point mass | MRO110C 8 × 8 |
| Atmospheric drag | Jacchia–Roberts | - | Mars Gram 2010 |
| Solar radiation pressure | Dual cone | Dual cone | Dual cone |
| Third bodies () | Sun, Moon, Mars | Earth, Mars, Jupiter | Earth, Sun, Jupiter |
| SOI distance | 925,000 km | - | 577,000 km |
| Targeting Name | Constraint Value | |||
|---|---|---|---|---|
| Departure | 19 December 2030~2 January 2031 | 10.0~12.4 km2/s2 | ||
| 50 or 100 min | 12.1°~19.8° | |||
| 3.7 km/s | 228.1°~231.2° | |||
| B-plane | Converging values of “Departure” problem | 27 September 2031~1 November 2031 | ||
| 0.0 km | ||||
| 15,000.0 km | ||||
| Mars approach | Converging values of “B-plane” problem | 27 September 2031~1 November 2031 | ||
| 90.0° | ||||
| 425 km | ||||
| MOI | 800 s | 35 h |
| Event | Translational ∆V |
|---|---|
| TCM | 40 m/s |
| MOI | 1390 m/s |
| Braking maneuver | 50 m/s |
| Orbit maintenance | 20 m/s |
| Attitude control | 66 m/s |
| Margin | 50 m/s |
| Totals | 1616 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.-J.; Kang, H.; Lee, K.; Kwon, S. A Pattern Search Method to Optimize Mars Exploration Trajectories. Aerospace 2023, 10, 827. https://doi.org/10.3390/aerospace10100827
Choi S-J, Kang H, Lee K, Kwon S. A Pattern Search Method to Optimize Mars Exploration Trajectories. Aerospace. 2023; 10(10):827. https://doi.org/10.3390/aerospace10100827
Chicago/Turabian StyleChoi, Su-Jin, Hongjae Kang, Keejoo Lee, and Sejin Kwon. 2023. "A Pattern Search Method to Optimize Mars Exploration Trajectories" Aerospace 10, no. 10: 827. https://doi.org/10.3390/aerospace10100827
APA StyleChoi, S.-J., Kang, H., Lee, K., & Kwon, S. (2023). A Pattern Search Method to Optimize Mars Exploration Trajectories. Aerospace, 10(10), 827. https://doi.org/10.3390/aerospace10100827