1. Introduction
Earth observation satellites (EOS) are critical for obtaining surface information resources. They can image the Earth from space within a specified time and play an important role in meteorological forecasting, emergency rescuing and environmental protecting [
1]. With the development of satellite technology, the flexibility and autonomy of satellites are becoming stronger and stronger. Compared with a single satellite, a multi-satellite system (MSS) can better meet the current explosive growth of task requirements.
In the traditional satellite observation mode, satellites management mainly depends on the ground station, and all kinds of spatial information data are mostly transmitted back to the ground for unified processing [
2]. The task control center receives the user’s task request and transmits it to the ground station to generate an observation plan, which is uploaded to the satellite for execution when the satellite passes over the ground station. However, this mode has a slow response and requires significant human involvement for an MSS with large numbers of satellites, which is very inefficient. The improvement of satellite autonomous management and online decision-making capabilities enables space engineers to develop on-board autonomous systems for MSS. The Multi-Satellite Cooperative Autonomous Task Planning (MSCATP) is developing in the direction of coordination and autonomy.
Multi-satellite cooperation can make up for the deficiency of a single satellite. According to the method of organization, it can be divided into the centralized and the distributed task planning. In the centralized task planning, multiple satellites perform tasks under the unified planning of the controller satellite. It treats MSCATP as an optimization problem; a constraint satisfiable problem (CSP) model [
3], an integer model [
4,
5], and some general models such as graphs are used to model the problem [
6,
7,
8,
9,
10,
11]. In the solution of the centralized task planning problem, due to its NP-Hard characteristics, most are solved by heuristic methods, such as the ant colony algorithm [
12,
13,
14,
15,
16,
17], the particle swarm algorithm [
18,
19,
20,
21,
22], and some methods based on graph theory [
23,
24,
25,
26]. These heuristic optimization algorithms are easy to implement and can obtain near-optimal solutions in an acceptable time. Although the centralized task planning can obtain the global optimal solution under a certain condition, it is highly dependent on the control center. Meanwhile, it has poor robustness and cannot provide a task planning service for an MSS when facing the single point breakdown of the controller satellite. Therefore, some works try to adopt the distributed task planning methods.
The distributed task planning focuses on how to design the organizational structure of satellite cooperative control, so as to realize independent task allocation and negotiation among multiple satellites. Hewitt systematically expounded NASA’s point of view on Agent and proposed the idea of using Agent technology to realize the autonomy of ground systems and spacecraft [
27]. For an MSS, a new generation of satellites with on-board autonomous planning capabilities can make full use of the individual intelligence of agents to form a multi-agent system (MAS) and solve on-board planning problems through multi-agent collaboration [
28].
The organizational model of a multi-agent system reflects the roles, interrelationships and authority structures of agents [
29]. The hierarchical organization is the most commonly used model [
30]. In a hierarchical organization, other agents are managed by a control center with the highest authority. Lin et al. performed job dispatch for distributed systems using a dynamic load-balancing strategy implemented on a central controller [
31]. Kennedy adopted a two-layer scheduling method to solve the constellation joint planning problem but caused a serious computational load on the control center [
32]. Most spatial applications use a hierarchical organization model due to its clear structure, easy control and strong universality. However, its robustness is poor, and its high reliance on the control center will result in high computational cost. Coalition-based organization is another commonly used organizational model. In the coalition-based organization, each agent is completely independent and equal, and its decision-making is based on its own favorable criteria [
33]. Schetter et al. constructed a multi-satellite task negotiation and assignment method with a hierarchical structure and divides the satellites into four different levels of agents [
9]. Li et al. proposed a multi-autonomous satellite cooperative mission planning framework based on JADE (Java Agent Development Framework, TILAB, State of California, United States), which consists of a single-satellite autonomous layer and a multi-satellite cooperative layer [
34]. Du et al. designed a distributed multi-dimensional multi-agent task cooperation framework, which divided satellites into a management layer and a working layer, and the management layer satellites were responsible for the negotiation and distribution of observation tasks in addition to the basic functions of the working layer [
10]. The advantage of this structure is strong robustness and low computational cost, but the disadvantage is that only considering what is beneficial to itself will affect the global revenue to a certain extent.
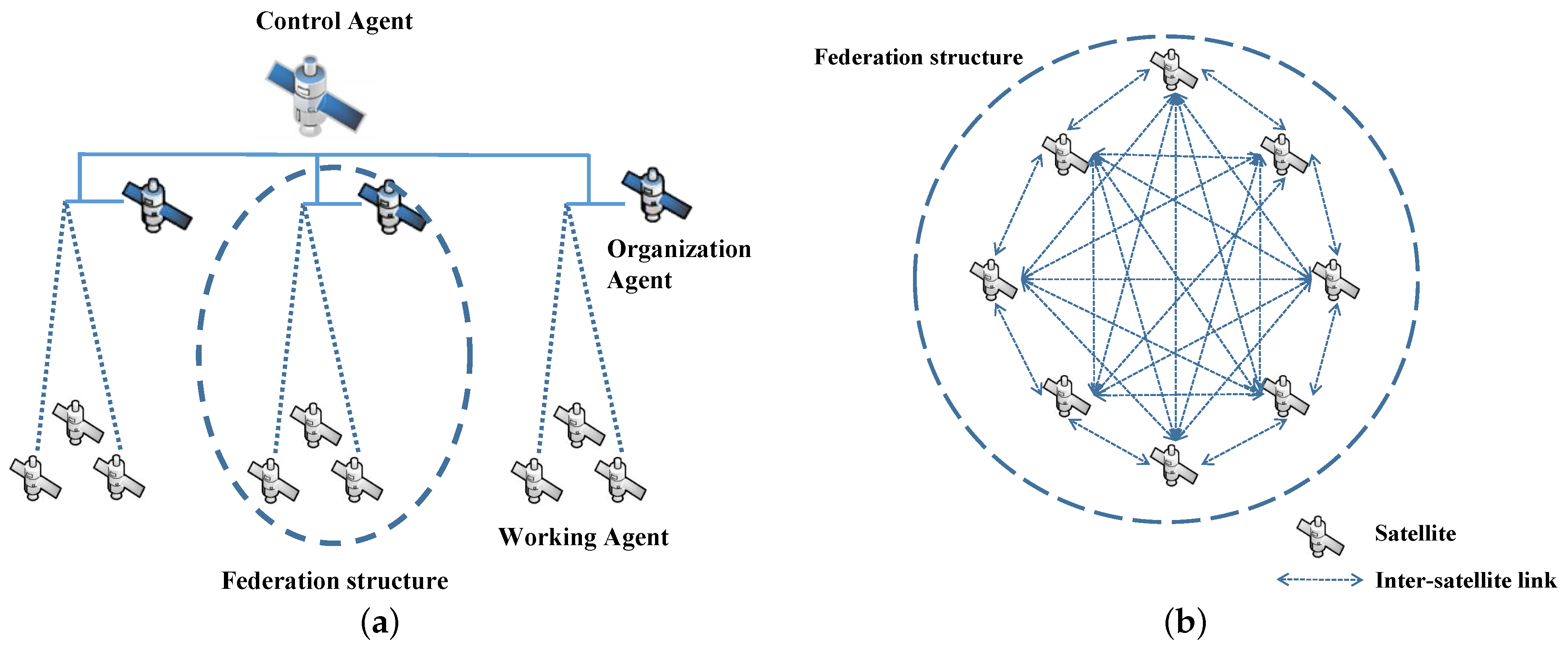
To address the above respective defects in centralized and distributed structure, a central-distributed federation architecture is proposed in this paper. In the federated architecture, agents are organized into multiple groups with complex functions, namely federation. The entire multi-agent system consists of several federations, each of which is independent of each other but internally coordinated and cooperative.
Based on the organizational model of the MAS, satellites can jointly complete tasks through negotiation on the basis of autonomous decision-making. Facing the realistic scenarios of multi-satellites and multi-tasking, it is necessary to develop an effective task allocation strategy. Based on Darwin’s theory of evolution, the genetic algorithm simulates natural selection and evolves the optimal solution of the problem through selection, crossover, mutation and inheritance. For example, Han designed a hybrid adaptive genetic algorithm combined with a large-neighborhood search process, in which “destroy” and “repair” operations are performed on elite individuals to enhance local search capabilities in each generation of the genetic algorithm [
35]. In addition, other researchers improved the genetic algorithm in fitness function, coding, crossover operator and other aspects to solve the task planning problem [
36,
37,
38,
39,
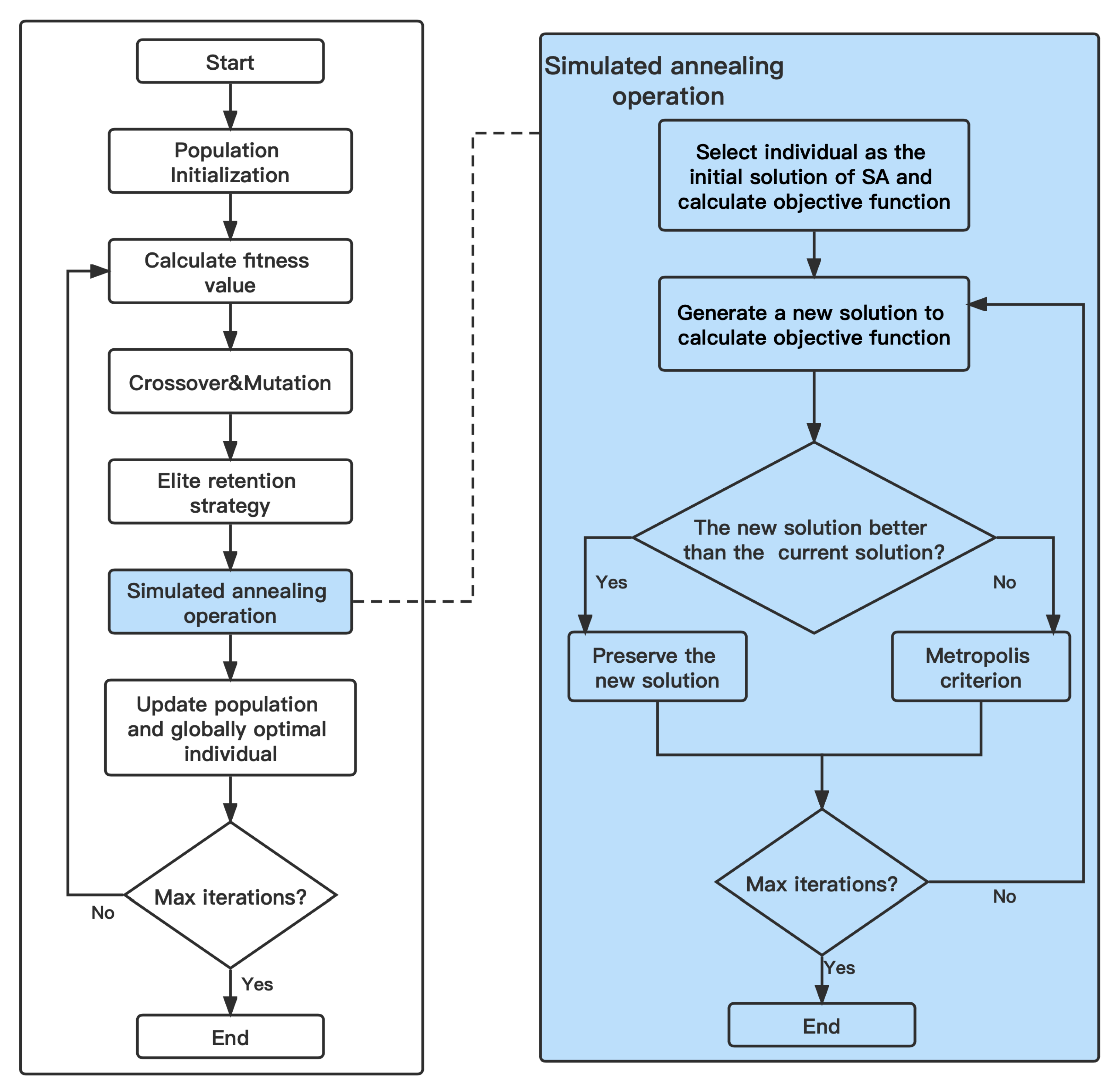
40]. Despite these improvements, how to develop an effective method for MSCATP remains an open question. A genetic algorithm can be applied to solve large-scale optimization problems. Although it can avoid the dilemma of local optimization to a certain extent, in the face of some complex problems, a genetic algorithm still has certain limitations, and it is difficult to accurately converge to the global optimal solution. Simulated annealing (SA) is an annealing-inspired search method in which a probabilistic approach is used to accept candidate solutions that can “jump” from a local optimum [
41]. Through a new hybrid technique in which a simulated annealing process is combined with an adaptive approach to design an improved genetic algorithm, the local search capability of GA is enhanced using SA to provide proper exploration and exploitation of large solution spaces [
42,
43,
44].
In this paper, we discuss the modeling and algorithms of MSCATP. Our work contributions are as follows:
We built a multi-satellite collaborative federation architecture based on multi-agents for MSS, which overcomes the shortcoming that the inter-satellite resources are independent and lack cooperation, and allows the satellites to exchange information status with each other. It combines the characteristics of centralized management and distributed collaboration, and has high robustness and intellectual abilities.
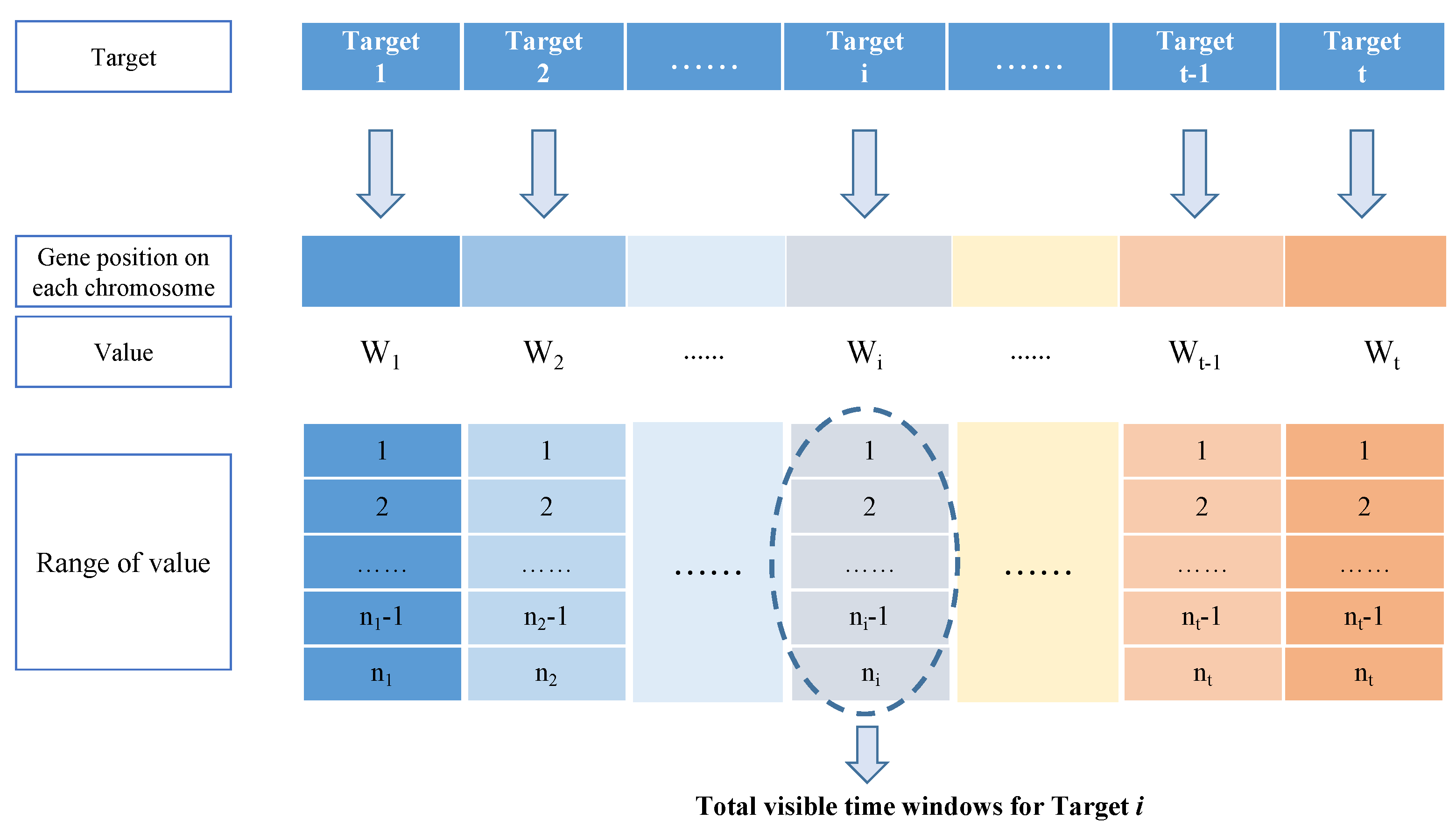
We develop a hybrid genetic algorithm with simulated annealing to solve MSCATP. Specifically, the standard of accepting new solutions is improved by introducing a simulated annealing operation, and the threshold of accepting new solutions is set, which changes the way that the algorithm jumps out of the local optimal solution. Meanwhile, the task sequence represented by the real-coding format can shorten the chromosome length and improve the search speed.
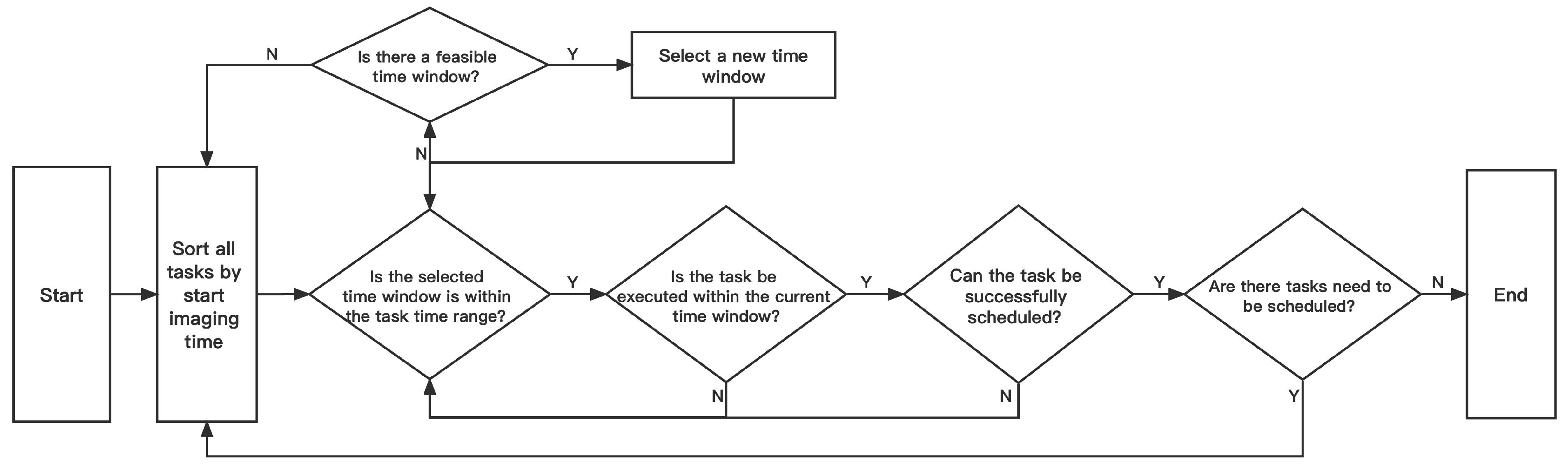
We construct a heuristic scheduling strategy to eliminate the possibility of task time window preemption in MSCATP, which can effectively resolve task conflicts and complete tasks as much as possible.
The organization of this paper is as follows:
Section 2 presents a multi-satellite task cooperation framework; on this basis, an autonomous task planning method is proposed.
Section 3 establishes a simulation scenario to illustrate the effectiveness of experimental results.
Section 4 discusses the advantages and disadvantages of the algorithm.
Section 5 presents the summary and outlook.
3. Results
In this section, we obtain computational data through experiments to evaluate the effectiveness of our proposed method and demonstrate that it outperforms other existing methods. The coding environment of all algorithms is Matlab 2018a, and the simulation scenarios, including satellite establishment, target selection and time window calculation, are all realized by STK 11.6 simulation software. The simulation computer environment is Intel Core i3-3220 CPU @ 3.30 GHz 3.30 GHz, 8 GB RAM.
3.1. Simulation Scenario
The Satellite Tool Kit (STK) supports the entire process of space tasks; the core capabilities of STK are the generation of position and attitude data, acquisition time, and remote sensor coverage analysis. It can be applied to scenarios such as satellites, vehicles, ground stations, targets, and remote sensors.
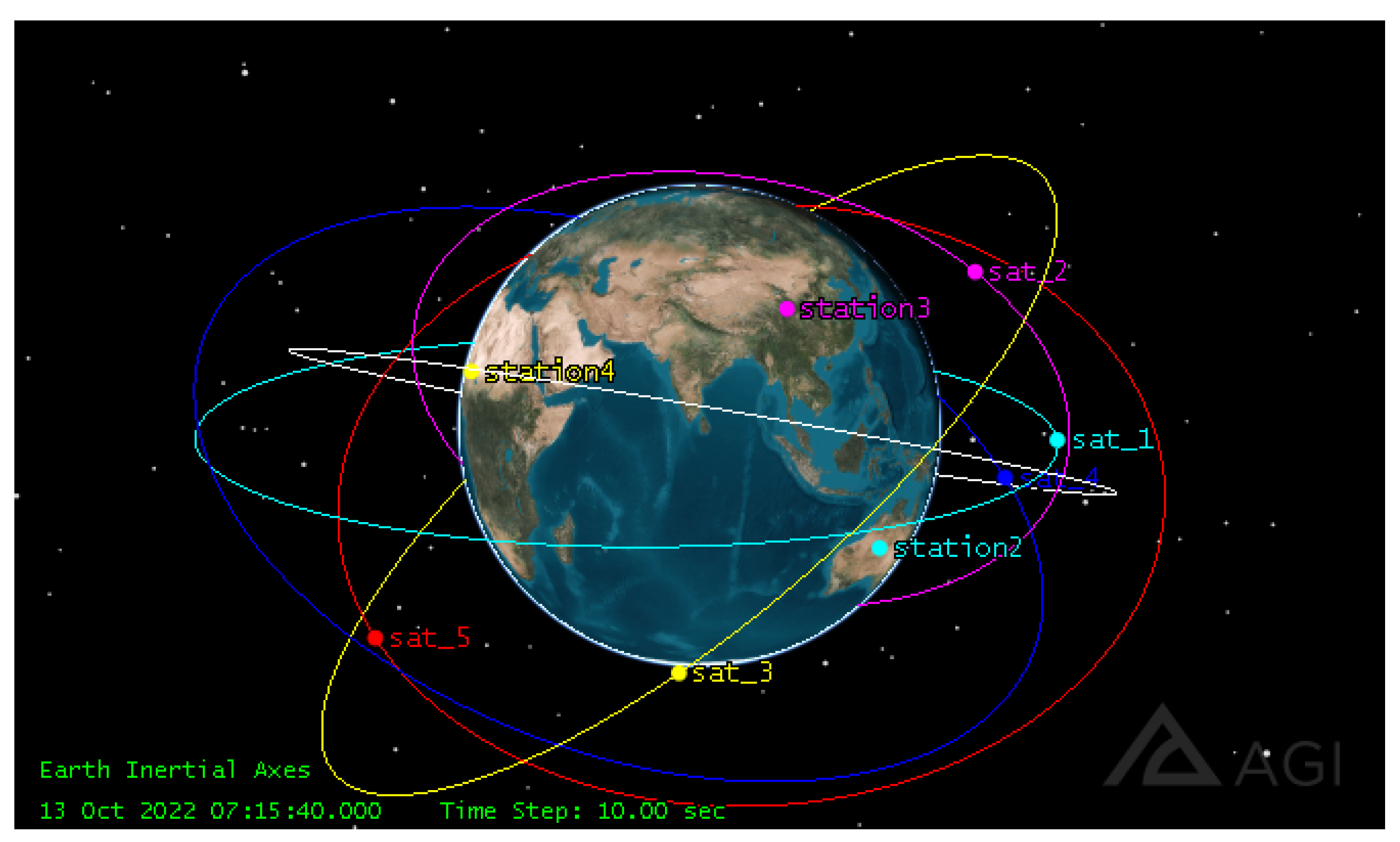
In terms of observation tasks, we use STK 11.6 software to randomly generate a certain number (25–100) of point targets as observation tasks, which randomly distribute on the Earth’s surface with latitude among (50° E, 150° E) and latitude among (40° S, 40° N). Each target is associated with a priority uniformly distributed among [1,10] and corresponding to different benefits. The time period of the scenario is (13 October 2022 00:00:00, 14 October 2022 00:00:00).
The orbital information of the satellite includes semi-major axis (
a), eccentricity (
e), inclination (
i), ascending node right ascension (
), argument of perigee (
), true perigee angle (
). The specific orbit parameters are shown in
Table 2. Task information is collected by ground stations and uploaded to the satellites, and we simulated four ground stations in the scenario. The distribution of the ground stations and satellites in STK is shown in
Figure 6.
3.2. Multi-Satellite Cooperative Autonomous Task Planning simulation Analysis
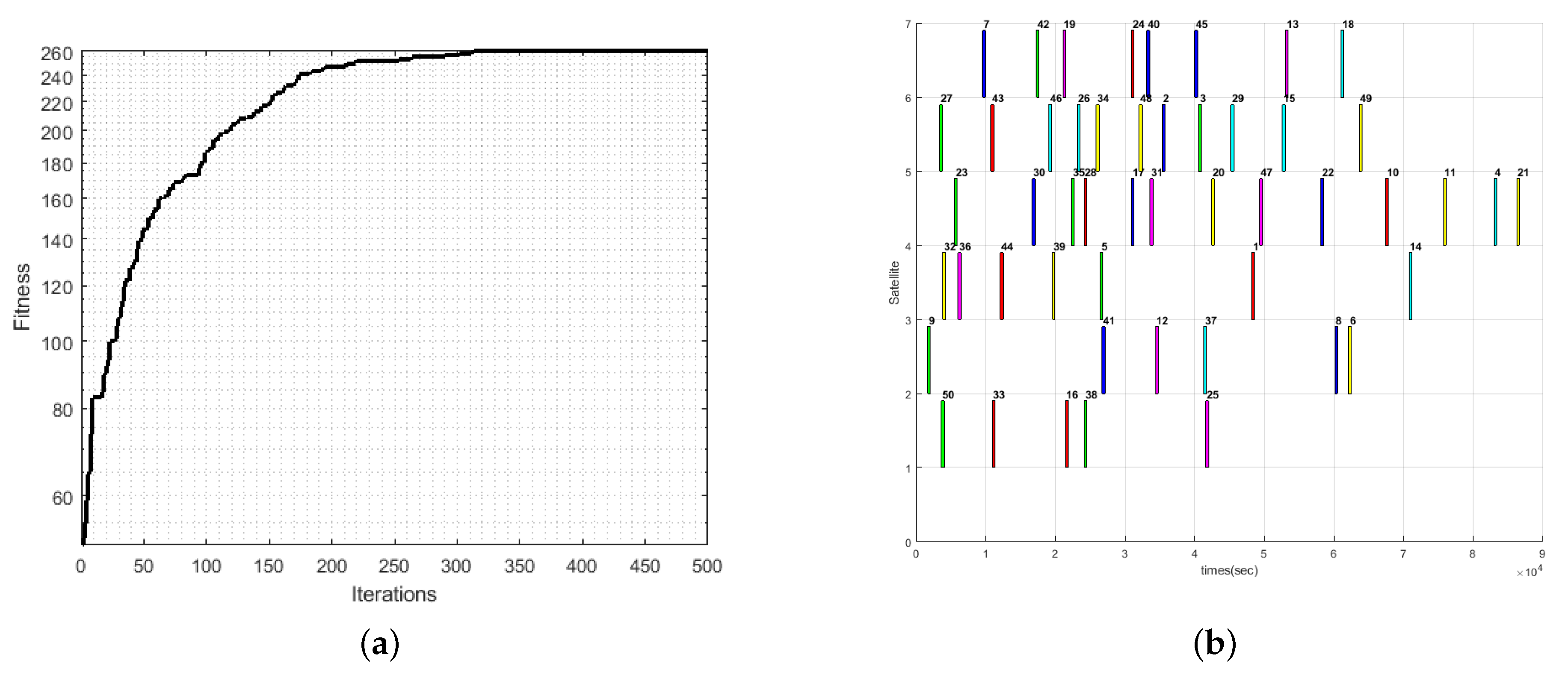
We selected 50 observation targets to conduct 10 experiments, and stipulated that the fixed observation time of each target point was 30 s. The average results are shown in
Table 3 and
Figure 7, and selected two evaluation indicators: task completion revenue and running time.
As shown in the above results, H-GASA has a good effect on solving multi-satellite collaborative autonomous task planning. The fitness value rises rapidly in the first 50 generations, indicating that the algorithm has an obvious improvement effect in the early stage. As the number of iterations increases, the probability of the new solution increases, and it is more inclined to generate individuals with higher fitness values, so the individual fitness value gradually increased and stabilized, finally converging at the 300-th generation.
3.3. Analysis of Algorithm Performance
3.3.1. Different Coding Format of H-GASA
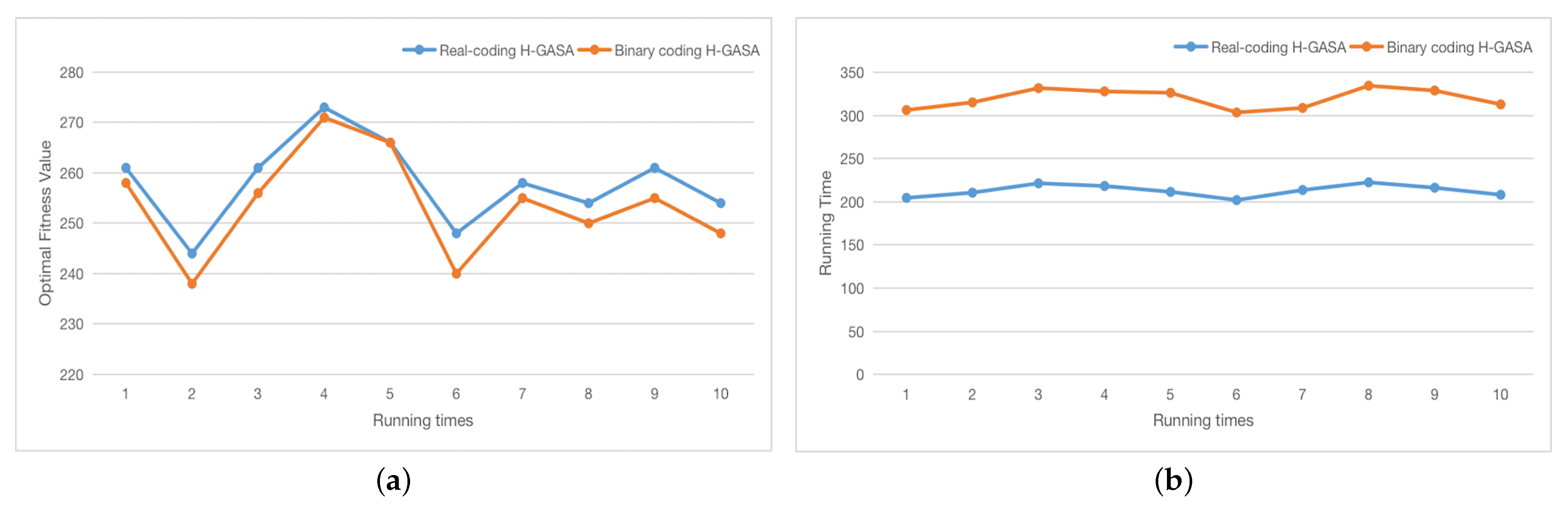
For multi-satellite multi-task scenarios, a different encoding format can usually determine the length of chromosomes and affect the efficiency of the algorithm. For our proposed real coding format and traditional binary coding format, 10 simulation experiments were carried out under the same conditions, and the results are shown in
Table 4 and
Figure 8.
As can be seen from the above results, the number of tasks determines that the chromosome length of real coding is 50, while that of binary coding is the number of visible time windows of the satellite to the target in a planning period. According to the comparison between the optimal fitness value and the running time, it can be seen that the genetic algorithm based on real coding is superior to the genetic algorithm based on binary coding in terms of optimization ability and calculation speed. Among them, the average computation time of H-GASA based on binary coding is about 1.5 times that of H-GASA based on real coding, which indicates that the coding format has an important impact on the performance of H-GASA algorithm. Obviously, the chromosome length has a significant influence on the evolution process, and a shorter chromosome length can speed up the search.
3.3.2. Comparison Results Analysis
According to the optimization goal in
Section 2, we carried out experiments comparing H-GASA and different algorithms for solving MSCATP under the same conditions. This paper selects GA, SA and PSO for experimental comparison. They are all widely used heuristic algorithms and are representative. The parameters of all algorithms for different task scenarios were set as shown in
Table 5. The results of several heuristic algorithms involved in the experiment are shown in
Figure 9 and the statistics for the results are shown in
Table 6.
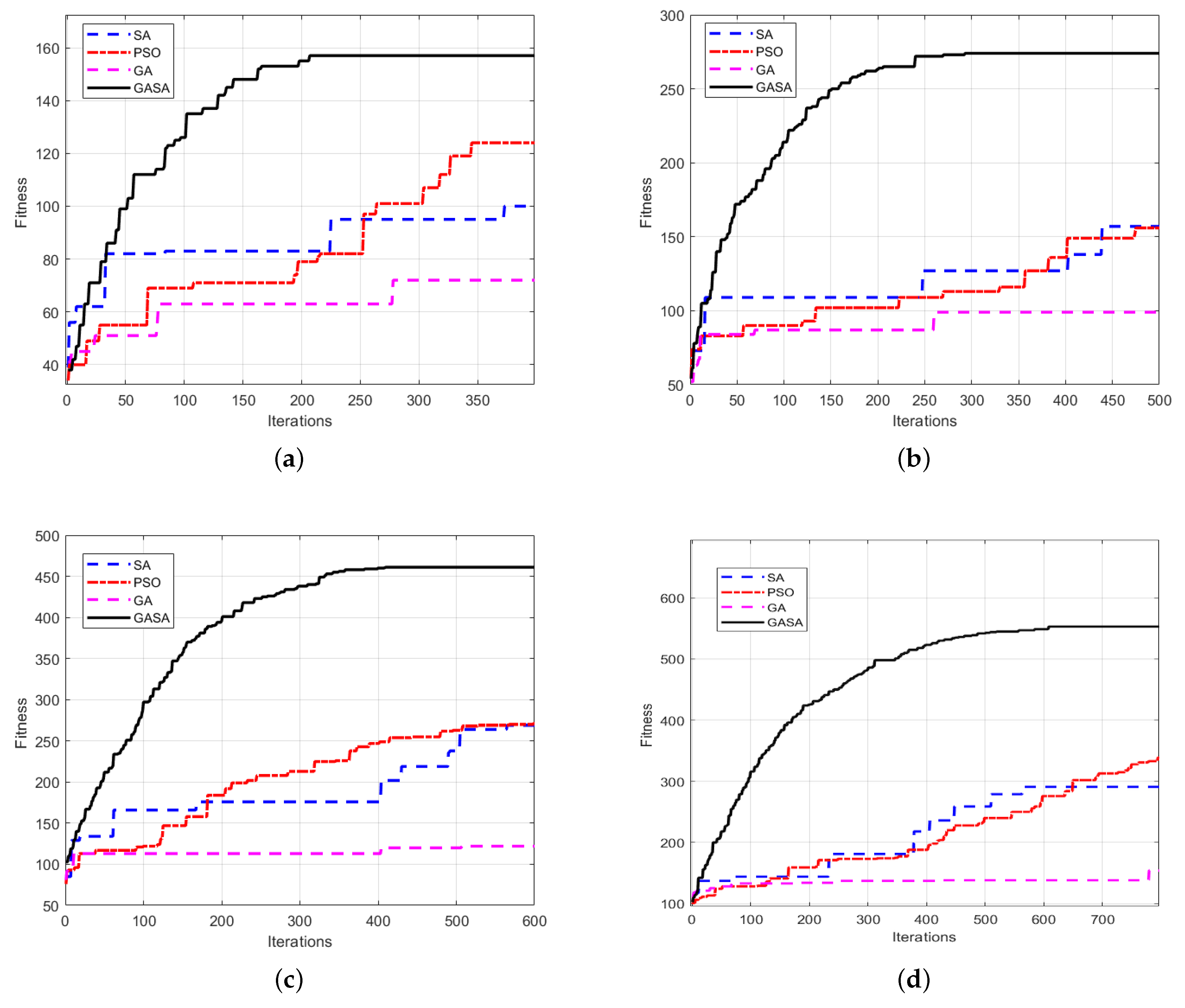
We have carried out three groups of task planning from 25 to 100 targets, respectively, and the specific values of the optimal fitness values corresponding to different target numbers are shown in
Table 6. From the above results, it can be seen that the H-GASA optimization results are much better than the existing three algorithms. When the number of targets increases from 25 to 100, H-GASA still has a strong optimization ability and can keep a good stability, which indicates that H-GASA still has a good computational efficiency when it is extended to large-scale operations. The specific average evolution curve analysis is shown in
Figure 9.
According to the comparison between the optimal fitness value and the convergence speed in
Figure 9, GA has a faster convergence speed but cannot achieve the optimal solution. PSO and SA have better optimization capabilities than GA but cannot achieve global convergence. H-GASA has obvious advantages in terms of optimization ability and calculation speed, and has good stability. Especially in terms of optimization ability, the optimal fitness value obtained by H-GASA is much higher than the other three algorithms. This is because H-GASA combines the advantages of the two algorithms and has stronger global search and local optimization capabilities. At the same time, H-GASA can achieve global convergence more stably than other algorithms.
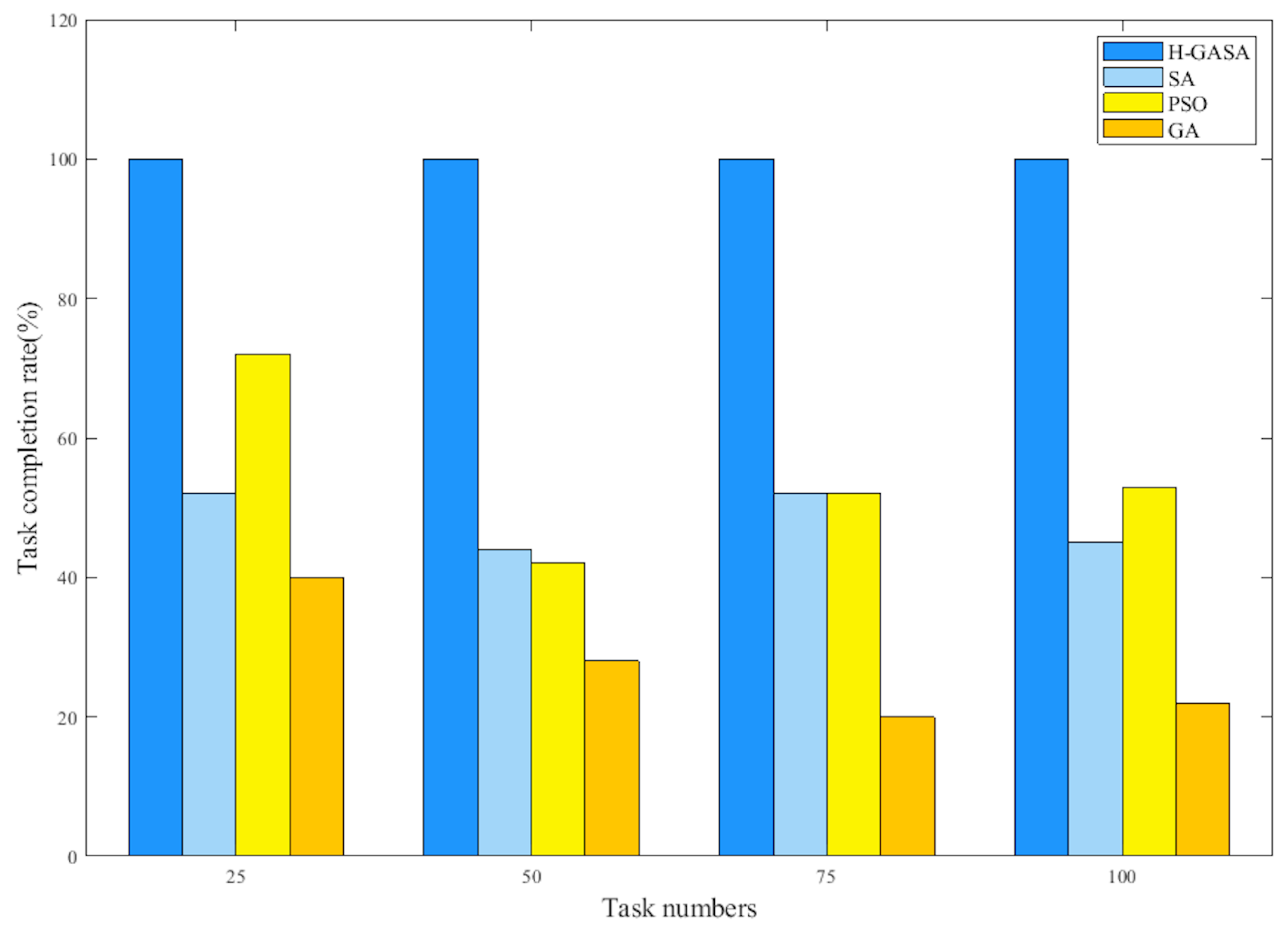
We also compared the task completion rates of several algorithms, and the results are shown in
Table 7 and
Figure 10.
As we can see from
Figure 10, compared with other algorithms, the task completion rate of H-GASA is higher than other algorithms, and it has reached the final convergence. The phenomenon of task conflict is improved by moving tasks with time window conflicts to non-overlapping time periods, and the utilization of task time windows in the planning period is raised. Meanwhile, it is verified that our proposed greedy task scheduling algorithm is effective.
4. Discussion
Recent research has focused on developing the satellite autonomy scheme for MSS. On-board autonomy planning is more successful in terms of safety and efficiency than uploading the results to the satellite after the ground station planning. In this study, on-board autonomous task planning is divided into two stages: multi-satellite task assignment and single-satellite task scheduling. The results show that the planning method proposed in this study can effectively plan all the tasks received by MSS. Specifically, this method can coordinate multiple satellites in MSS to make autonomous on-board planning for multiple tasks, and output the best task planning scheme according to the task information and satellite orbit state. As discussed in this paper, the H-GASA developed in this study performs better in terms of search speed and optimization ability, and has obvious advantages in various applications.
Table 6 and
Figure 9 show the benefits of planning schemes in different scenarios, which proves that this method can be widely used to support the planning, allocation and scheduling of tasks. This suggests that on-board autonomous task planning can be a worthwhile investment, especially in the long term.
In simulation results, the main advantages of our work are: (1) Less computation time. In the comparative analysis of different coding formats, we improved the coding format to shorten the average calculation time of the algorithm by 1.5 times, and improved the search speed of the algorithm; (2) The task completion rate and planning benefits are higher. In the benefit analysis, we compared the task completion rate and the final benefit, and the results show that our method has a significant improvement. This is because the algorithm can accept the poor individual solution with a certain probability, jump out of the local optimum and reach the global optimum. Meanwhile, this study considered that possible task conflicts caused by time window preemption will have a negative impact on planning results. Therefore, adding a heuristic strategy in the task scheduling process can effectively eliminate possible task time window conflicts and complete tasks as much as possible; (3) The basic energy consumption of satellites is reduced. The method can reduce the number of communications with the ground station, improve the utilization rate of satellite resources, and reduce the energy consumption of the satellite.
There are several aspects of this study that need to be improved in future simulation methods. The benefit analysis in different scenarios shows that, even in high demand scenarios, the global optimal solution can be achieved by increasing the number of iterations of the algorithm. However, the computational complexity of the algorithm will also increase significantly. Due to the low computing power of the on-board processor, in order to ensure efficiency, it is necessary to make a trade-off between the quality of the algorithm solution and the running time, and further improve the algorithm to balance the optimization ability and convergence speed.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}