V2X Communications Applied to Safety of Pedestrians and Vehicles




Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
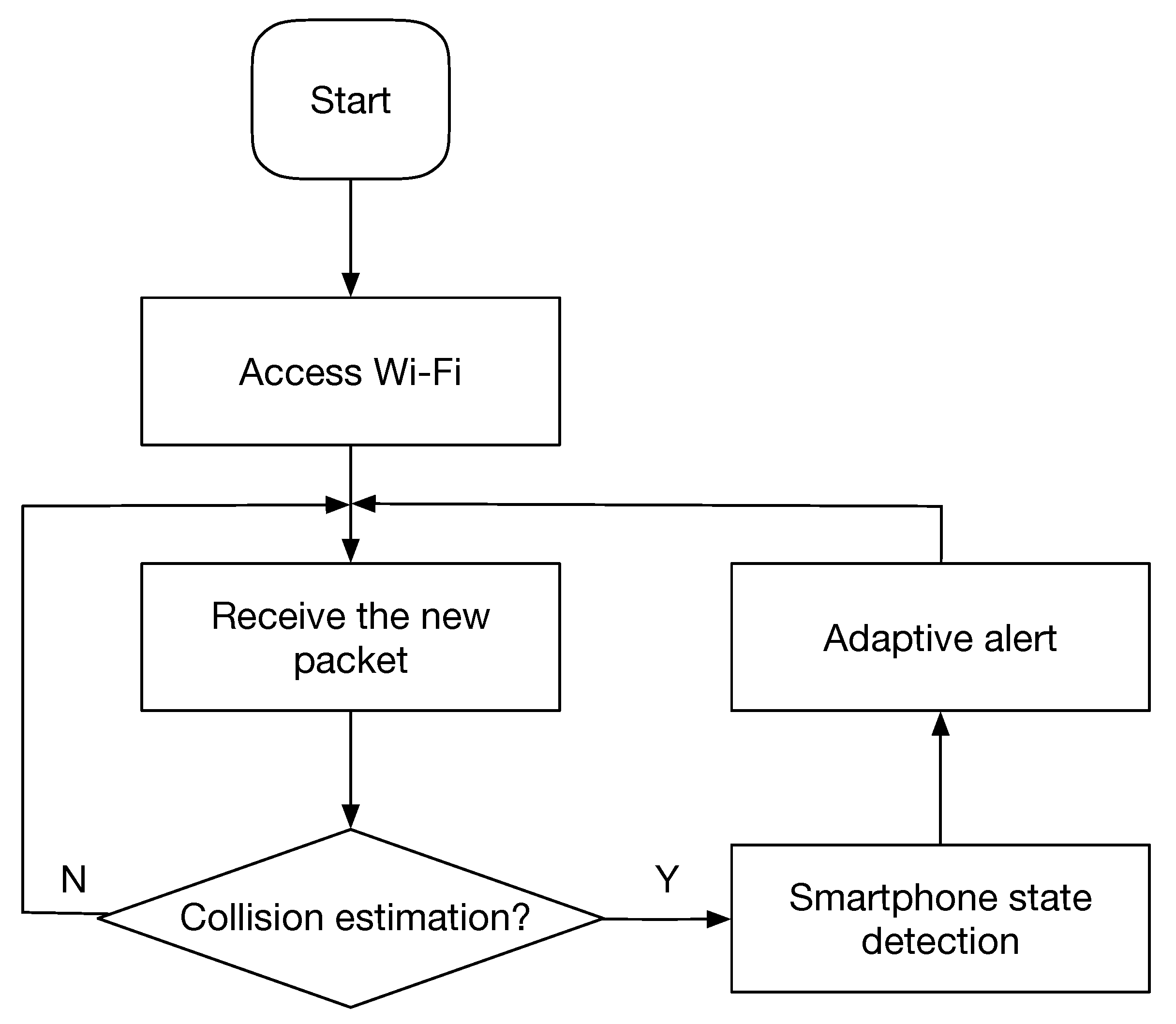
- The screen state;
- the item state;
- the voice screen state;
- the silent state of the smartphone.
- Design of a V2X communication system to provide interfaces for vehicle and pedestrian in safety-oriented applications;
- proposal of two applications focused on vehicle and pedestrian safety, respectively, on tablets and smartphones.
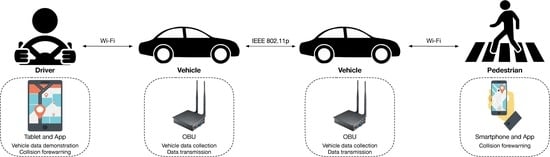
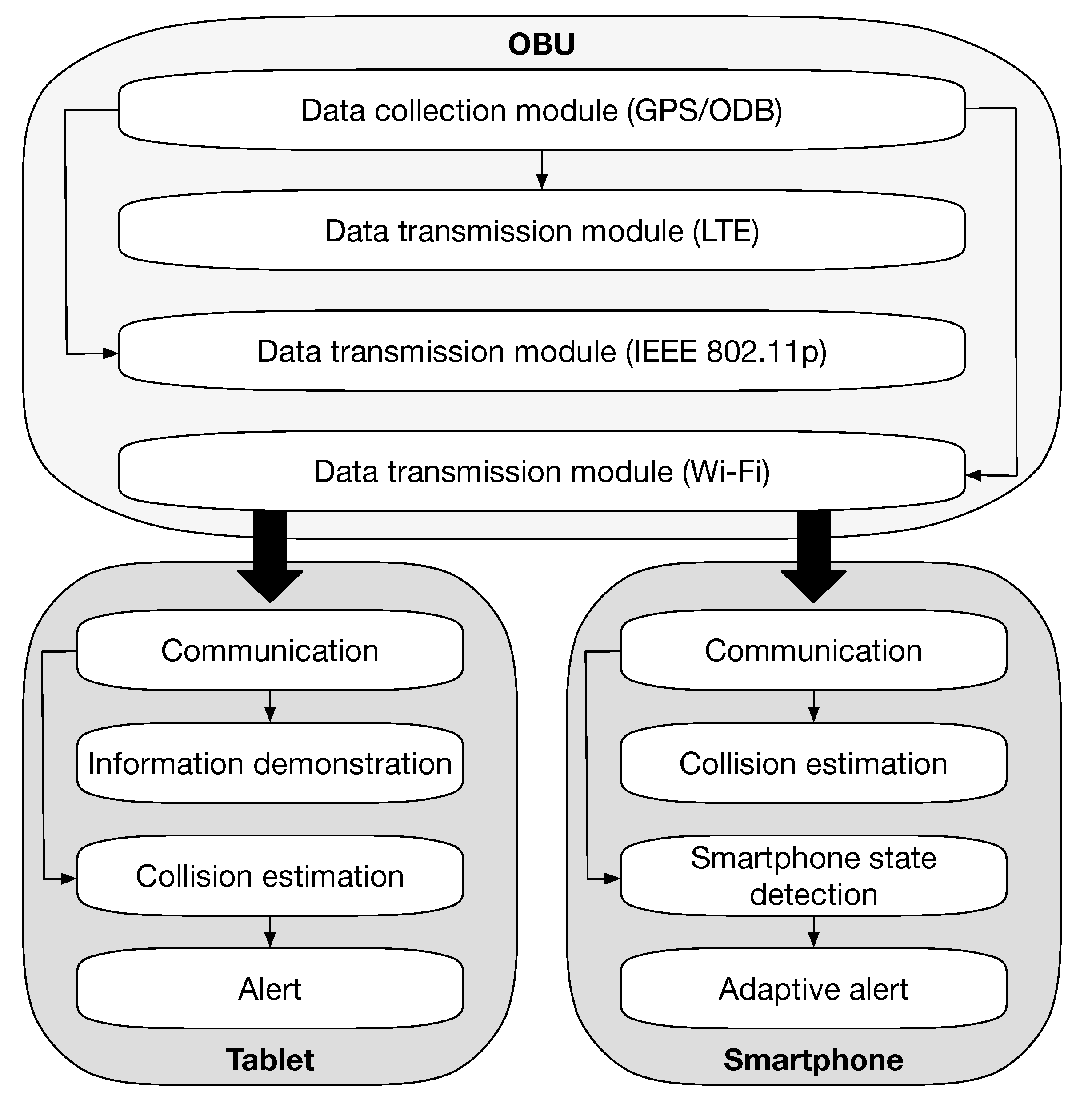
2. System Architecture
- The battery level of mobile devices;
- some factors can affect the data transmission quality, such as obstacles, packets lost rate, and transmission delay;
- the accuracy or precision of the positioning device could not be satisfied with the requirement of the safety system.
3. Concepts for Safety Applications
3.1. Vehicle Safety Application
3.2. Pedestrian Safety Application
- In the screen-oriented state, the warning can consist of a message visible on the screen, i.e., the warning message is printed on the screen;
- a voice alert can be provided in the voice-oriented state. For instance, when the vehicle that could cause a collision with the pedestrian threat comes from the left side, the pedestrian will hear a distinctive voice that could state, “Collision forewarning! Please pay attention to the car on the left side”;
- in the voice screen state, pedestrians can receive both the voice alert and the message on the screen simultaneously.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Neto, V.; Medeiros, D.; Campista, M. Analysis of mobile user behavior in vehicular social networks. In Proceedings of the 2016 7th International Conference on the Network of the Future (NOF), Buzios, Brazil, 16–18 November 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Deb, S.; Rahman, M.M.; Strawderman, L.J.; Garrison, T.M. Pedestrians’ Receptivity Toward Fully Automated Vehicles: Research Review and Roadmap for Future Research. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 279–290. [Google Scholar] [CrossRef]
- Uchida, N.; Takeuchi, S.; Ishida, T.; Shibata, Y. Mobile traffic accident prevention system based on chronological changes of wireless signals and sensors. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2017, 8, 57–66. [Google Scholar] [CrossRef]
- Giliberto, M.; Arena, F.; Pau, G. A fuzzy-based solution for optimized management of energy consumption in e-bikes. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2019, 10, 45–64. [Google Scholar] [CrossRef]
- Larue, G.; Watling, C.; Black, A.; Wood, J.; Khakzar, M. Pedestrians distracted by their smartphone: Are in-ground flashing lights catching their attention? A laboratory study. Accid. Anal. Prev. 2020, 134. [Google Scholar] [CrossRef]
- Song, F.; Zhu, M.; Zhou, Y.; You, I.; Zhang, H. Smart Collaborative Tracking for Ubiquitous Power IoT in Edge-Cloud Interplay Domain. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Rangesh, A.; Trivedi, M.M. When Vehicles See Pedestrians With Phones: A Multicue Framework for Recognizing Phone-Based Activities of Pedestrians. IEEE Trans. Intell. Veh. 2018, 3, 218–227. [Google Scholar] [CrossRef]
- Toppan, A.; Bazzi, A.; Toppan, P.; Masini, B.; Andrisano, O. Architecture of a simulation platform for the smart navigation service investigation. In Proceedings of the 2010 IEEE 6th International Conference on Wireless and Mobile Computing, Networking and Communications, Niagara Falls, ON, Canada, 11–13 October 2010; pp. 548–554. [Google Scholar] [CrossRef]
- Pau, G.; Campisi, T.; Canale, A.; Severino, A.; Collotta, M.; Tesoriere, G. Smart pedestrian crossing management at traffic light junctions through a fuzzy-based approach. Future Internet 2018, 10, 15. [Google Scholar] [CrossRef]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A. The effects of urban traffic noise on children at kindergarten and primary school: A case study in Enna. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040, p. 140005. [Google Scholar] [CrossRef]
- Ticali, D.; Denaro, M.; Barracco, A.; Guerrieri, M. Piezoelectric energy harvesting from raised crosswalk devices. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2015; Volume 1648. [Google Scholar] [CrossRef]
- Arena, F.; Ticali, D. The development of autonomous driving vehicles in tomorrow’s smart cities mobility. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Xia, S.; de Godoy Peixoto, D.; Islam, B.; Islam, M.T.; Nirjon, S.; Kinget, P.R.; Jiang, X. Improving Pedestrian Safety in Cities Using Intelligent Wearable Systems. IEEE Internet Things J. 2019, 6, 7497–7514. [Google Scholar] [CrossRef]
- Ai, Z.; Liu, Y.; Song, F.; Zhang, H. A Smart Collaborative Charging Algorithm for Mobile Power Distribution in 5G Networks. IEEE Access 2018, 6, 28668–28679. [Google Scholar] [CrossRef]
- Song, F.; Ai, Z.; Zhou, Y.; You, I.; Choo, R.; Zhang, H. Smart Collaborative Automation for Receive Buffer Control in Multipath Industrial Networks. IEEE Trans. Ind. Inform. 2019. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Silva, C.; Silva, L.; Santos, L.; Sarubbi, J.; Pitsillides, A. Broadening understanding on managing the communication infrastructure in vehicular networks: Customizing the coverage using the Delta Network. Future Internet 2018, 11, 1. [Google Scholar] [CrossRef]
- Sheu, S.; Hsie, P.; Cheng, Y.; Wu, J. Coordinated scheduling scheme for IEEE 802.11p wireless vehicular networks using centralized scheduling of IEEE 802.16e wireless metropolitan area networks. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 772–776. [Google Scholar] [CrossRef]
- IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as Amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE: Piscataway, NJ, USA, 2010; pp. 1–51. [CrossRef]
- Hancke, G.P.; Silva Bde, C.; Hancke, G.P., Jr. The Role of Advanced Sensing in Smart Cities. Sensors 2013, 13, 393–425. [Google Scholar] [CrossRef] [PubMed]
- Masini, B.; Zuliani, L.; Andrisano, O. On the effectiveness of a GPRS based intelligent transportation system in a realistic scenario. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; Volume 6, pp. 2997–3001. [Google Scholar]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A.; Arena, F. Modelling and simulation of passenger flow distribution at terminal of Catania airport. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.; Zanella, A. Performance comparison between IEEE 802.11p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 109–114. [Google Scholar]
- Ticali, D.; Acampa, G.; Denaro, M. Renewable energy efficiency by railway transit. Case study on Rebaudengo railway tunnel in Turin. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2018; Volume 2040. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. A distributed virtual traffic light algorithm exploiting short range V2V Communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Balador, A.; Uhlemann, E.; Calafate, C.; Cano, J.C. Supporting beacon and event-driven messages in vehicular platoons through token-based strategies. Sensors 2018, 18, 955. [Google Scholar] [CrossRef]
- Zhenyu, L.; Lin, P.; Konglin, Z.; Lin, Z. Design and evaluation of V2X communication system for vehicle and pedestrian safety. J. China Univ. Posts Telecommun. 2015, 22, 18–26. [Google Scholar] [CrossRef]
- Capallera, M.; Carrino, S.; De Salis, E.; Khaled, O.; Meteier, Q.; Angelini, L.; Mugellini, E. Secondary task and situation awareness, a mobile application for conditionally automated vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings, Utrecht, The Netherlands, 21–25 September 2019; pp. 86–92. [Google Scholar]
- Veena, S.; Ramyadevi, K.; Elavarasi, K.; Preetha, M. Smart car automated system to assist the driverin detecting the problem and providing the solution. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 727–731. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Morold, M.; David, K.; Dressler, F. Car-to-Pedestrian communication with MEC-support for adaptive safety of Vulnerable Road Users. Comput. Commun. 2020, 150, 83–93. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Wang, Y.; Zhao, T.; You, I.; Zhang, H. Smart Collaborative Distribution for Privacy Enhancement in Moving Target Defense. Inform. Sci. 2019, 479, 593–606. [Google Scholar] [CrossRef]
- Wang, S.; Yuan, J.; Li, X.; Qian, Z.; Arena, F.; You, I. Active Data Replica Recovery for Quality-Assurance Big Data Analysis in IC-IoT. IEEE Access 2019, 7, 106997–107005. [Google Scholar] [CrossRef]
- Linux Wireless Wiki. Available online: https://wireless.wiki.kernel.org (accessed on 31 October 2019).
- Qiu, H.; Qiu, M.; Lu, Z.; Memmi, G. An efficient key distribution system for data fusion in V2X heterogeneous networks. Inf. Fusion 2019, 50, 212–220. [Google Scholar] [CrossRef]
- Filippi, A.; Moerman, K.; Daalderop, G.; Alexandera, P.D.; Schober, F.; Pfliegl, W. Ready to roll: why 802.11p beats LTE and 5G for V2X, A White Paper. Available online: https://assets.new.siemens.com/siemens/assets/public.1510309207.ab5935c545ee430a94910921b8ec75f3c17bab6c.its-g5-ready-to-roll-en.pdf (accessed on 13 November 2019).
- Khodaei, M.; Noroozi, H.; Papadimitratos, P. Scaling Pseudonymous Authentication for Large Mobile Systems. In Proceedings of the WiSec ’19 Proceedings of the 12th Conference on Security and Privacy in Wireless and Mobile Networks, Miami, FL, USA, 15–17 May 2019; pp. 174–184. [Google Scholar] [CrossRef]
- Qiu, H.; Kapusta, K.; Lu, Z.; Qiu, M.; Memmi, G. All-Or-Nothing data protection for ubiquitous communication: Challenges and perspectives. Inf. Sci. 2019, 502, 434–445. [Google Scholar] [CrossRef]
- Qiu, H.; Qiu, M.; Lu, R. Secure V2X Communication Network based on Intelligent PKI and Edge Computing. IEEE Netw. 2019, 1–7. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Tropea, M.; Fazio, P.; De Rango, F. Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation. Sensors 2018, 18, 1461. [Google Scholar] [CrossRef] [PubMed]
- Medeiros, D.S.; Hernandez, D.A.; Campista, M.E.M.; Aloysio de Castro, P.P. Impact of relative speed on node vicinity dynamics in VANETs. Wirel. Netw. 2019, 25, 1895–1912. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. An OFDMA-Based MAC Protocol for Next-Generation VANETs. IEEE Trans. Veh. Technol. 2015, 64, 4088–4100. [Google Scholar] [CrossRef]
- Nkenyereye, L.; Tama, B.; Park, Y.; Rhee, K. A fine-grained privacy preserving protocol over attribute based access control for VANETs. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2015, 6, 98–112. [Google Scholar]
- Sarubbi, J.; Silva, T.; Martins, F.; Wanner, E.; Silva, C. Allocating Roadside Units in VANETs Using a Variable Neighborhood Search Strategy. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Eziama, E.; Tepe, K.; Balador, A.; Nwizege, K.; Jaimes, L. Malicious Node Detection in Vehicular Ad-Hoc Network Using Machine Learning and Deep Learning. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Brahmi, H.I.; Djahel, S.; Murphy, J. Improving emergency messages transmission delay in road monitoring based WSNs. In Proceedings of the 6th Joint IFIP Wireless and Mobile Networking Conference (WMNC), Dubai, UAE, 23–25 April 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, C.; Chen, P.; Chen, W. A Novel Emergency Vehicle Dispatching System. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Vaculík, M.; Franeková, M.; Vestenický, P.; Vestenický, M. On-board Unit and its Possibilities of Communications on Safety and Security Principles. Adv. Electr. Electron. Eng. 2008, 7, 235–238. [Google Scholar]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arena, F.; Pau, G.; Severino, A. V2X Communications Applied to Safety of Pedestrians and Vehicles. J. Sens. Actuator Netw. 2020, 9, 3. https://doi.org/10.3390/jsan9010003
Arena F, Pau G, Severino A. V2X Communications Applied to Safety of Pedestrians and Vehicles. Journal of Sensor and Actuator Networks. 2020; 9(1):3. https://doi.org/10.3390/jsan9010003
Chicago/Turabian StyleArena, Fabio, Giovanni Pau, and Alessandro Severino. 2020. "V2X Communications Applied to Safety of Pedestrians and Vehicles" Journal of Sensor and Actuator Networks 9, no. 1: 3. https://doi.org/10.3390/jsan9010003
APA StyleArena, F., Pau, G., & Severino, A. (2020). V2X Communications Applied to Safety of Pedestrians and Vehicles. Journal of Sensor and Actuator Networks, 9(1), 3. https://doi.org/10.3390/jsan9010003