1. Introduction
Cognitive radio [
1,
2,
3,
4] is a potential technology to realize flexible and efficient usage of frequency spectrum, and is a promising approach in dealing with the spectrum scarcity in future wireless communication networks. However, a key step to make it a reality is to effectively address some estimation issues, such as transmitter power estimation [
5] and monitoring in wireless networks. Spectrum sensing is among the most important ones, which aims to detect whether licensed spectrum is accessible. Some existing spectrum sensing methods in the literature are by way of matched filtering, waveform-based sensing [
6], cyclostationary-based sensing [
7,
8], and energy detection [
9,
10,
11,
12], etc. Clearly, energy detection is the most popular way to perform spectrum sensing.
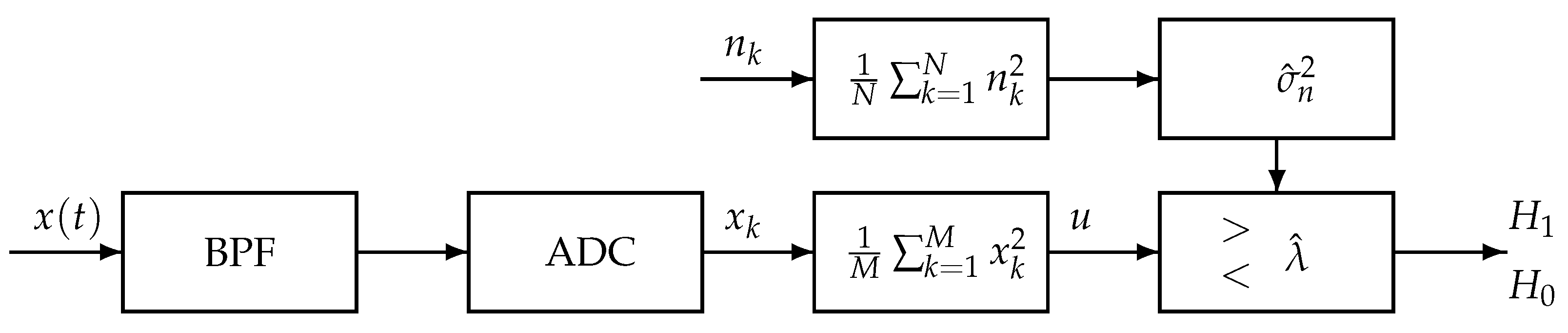
In this paper, the energy detection scheme is carried out under the framework shown in
Figure 1, which is a generation of the detection scheme described in [
13]. The similar part is that the input signal
is first passing a Band-Pass Filter (BPF) and next the signal is digitized by an analog to digital converter (ADC), then, a simple square and average device is used to estimate the received signal energy. For a real input signal, the estimated energy,
, is then compared with a threshold,
, to decide if a signal is present (
) or not (
). The threshold for energy detection used in [
13] is constructed using the information of noise variance and signal-to-noise ratio. In the proposed framework shown by
Figure 1, the noise variance is estimated from another available channel,
, and then the estimated noise variance is used to construct the detection threshold. This setting of detection is more applicable, since the real complicated noise is derived from various sources and thus its variance may change from time to time. Though the method using estimated noise variance to construct the threshold has been proposed in the literature, e.g., [
14,
15,
16,
17], they did not analyze the effect caused by using the estimation variance. An interesting double threshold detection method is presented in [
18] using exact noise variance to separate three cases of detection: spectrum free, spectrum occupied and not certain. In this paper, we will calculate the expectation of the detection event by using the estimated variance and thus a much more accurate threshold may be derived for detection.
The threshold is determined typically based on two principles: constant false alarm rate (CFAR) and constant detection rate (CDR), which will be further explained in
Section 2. In both cases, the noise variance (power) is generally supposed to be known to determine the threshold, as shown in [
19,
20]. However, noise variance may vary significantly in both temporal and spatial dimension due to the fact that the total noise is composed of thermal noise, receiver noise, and environmental noise. Generally, one may take the estimated noise variance, to some certain extent, as the noise variance in the calculation of the threshold in energy detection accordingly. The following two examples are given in [
13] for practical performance of energy detection. One example is that a certain channel is reserved for special applications by spectrum regulators. The special channel can only be used to estimate noise variance, and can never be used by a secondary user. For instance, channel 37 (from 608 to 614 MHz) in FCC is used in very few occasions but for radioastronomy. Another example is the detection of DTV pilot signals, in which the noise variance can be estimated from some frequency bin not corresponding to the pilot frequency under the low SNR scenario. In both examples, a threshold is computed from the estimated noise variance based on CFAR or CDR principles. Then, the threshold is used in the subsequent detection to determine whether a signal is present or not by comparing with the detected energy from the channel of interest or from the known pilot frequency bin.
What are the encountered problems for detection using estimated noise variance? For CFAR principle, the resultant false alarm rate may not be guaranteed as the preassigned level . Since the resultant rate is actually a random variable. Indeed, the estimated noise variance is a random variable. Thus the CFAR threshold, denoted by , using variance is also a random variable, which implies that the resulted probability of false alarm for energy detection, denoted as , is also a random variable. Obviously, it is generally impossible to expect that equals the preassigned . Let us show a simple example here for demonstration of the theoretical results. Let , , if we want to set a threshold by the standard energy detection method (replacing the noise variance by its estimation) to guarantee , the preassigned false alarm rate to set the threshold should be cautious and it is found by Theorem 1 that it should be approximately , which is much smaller than the desired rate . However, if the sample number N increases to 100, the preassigned false alarm rate could be . As the sample number N increases, the preassigned rate approaches to itself.
In this paper we analyze the difference between
and
. It is found in [
13] that the expectation of
, which is actually calculated using an approximated random variable therein, is greater than
for some predesigned
, say,
, which is shown in
Figure 2 therein. Hence, to make a proper choice of the threshold, it is critical to answer the following questions:
What is the expectation of ?
What is the variance of ? (equivalently, the second moment of )
What is the limitation of for a fixed as N, the number of samples used to estimate the noise variance, and M, the number of samples used to perform detection, tend to infinity?
Although a part of these issues, e.g., the first and third for the case of
, have been tackled and initially studied in [
13]. Yet, the study failed to find an explicit form for
, which leaves a large space for further advance. Motivated by this, we investigate the problems by explicitly describing
and establishing an upper bound for
, which well answers the first issue and the second partly. Moreover, with an approximation of
based on an estimated distribution of the resulted threshold
, the third question is analyzed for some special cases. Nevertheless, some new CFAR thresholds for energy detection are proposed by confirming that
equals to the predesigned false alarm probability
.
The rest of this paper is organized as follows. The model setting and hypothesis testing of energy detection by a known noise variance is introduced in
Section 2, where the CFAR thresholds are derived in an exact way and an approximating way, respectively, by assuming Gaussian signals.
Section 3 numerically investigates the selection of CFAR based on an estimated noise variance to set a CFAR threshold. In
Section 4, we analyze some basic statistical properties of the resulted probability of false alarm
given by (
21) along with
, the estimated case given by (
24). Specifically, we come up with explicit descriptions for the expectations of
and
by Theorems 1 and 3, respectively, and some discussions on the corresponding properties. In
Section 5, upper bounds on
and
are derived by Theorems 5 and 6, respectively, due to the difficulty in finding the exact explicit forms by any known special functions. In
Section 6, new CFAR thresholds are proposed, aiming to assure that
or
equals to the predetermined false alarm probability
. Concluding remarks and future research are listed in
Section 7. All analytical results derived in this paper are regarding CFAR thresholds. However, as a matter of fact, similar results also hold for the CDR case.
2. Model Setting and Hypothesis Testing with Known Noise Variance
Spectrum sensing is an important task for a secondary user in a cognitive radio network in order to determine whether a licensed band is currently occupied by a primary user or not. This is can be formulated into a binary hypothesis testing problem: [
13,
20]:
where
,
, and
represents the primary user’s signal, the noise, and the received signal, respectively. The noise is assumed to be Gaussian random process of zero mean and variance
, whereas the signal is also assumed to be iid Gaussian random process of zero mean and variance of
. The signal to noise ratio is defined as the ratio of signal variance to the noise variance
The test statistics generated from the energy detector as shown in
Figure 1 are
Under the hypotheses
and
, the test statistic
u is a random variable whose probability density function (PDF) is chi-square distributed. Let us denote a chi-square distributed random variable
X with
M degrees of freedom as
, and recall its PDF as
where
denotes Gamma function, given in (
15).
Clearly, under hypothesis
,
; and
under
with
. Thus, the PDF of test statistics
u, given by test, is
When
M is sufficiently large, we can approximate the PDF of
u using Gaussian distribution:
For a given threshold
, the probability of false alarm is given by
where
is the upper incomplete gamma function in (
16). In addition, its approximating form of
corresponding to distribution (
6) for large
M is
where
is defined in (
14).
If the required probability of false alarm rate (
) is predetermined, the threshold (
) can be set accordingly by
where
is the inverse function of
. Furthermore, for the approximation case:
where
is the inverse function of
.
Similarly, under hypothesis
, for a given threshold
, the probability of detection is given by
where
is the upper incomplete gamma function. So, we derive the threshold to achieve a target probability of detection at the required signal level or SNR:
Furthermore, the corresponding approximating case is
The probability of false alarm is fixed to a small value (e.g., 5%) if it is required to guarantee a reuse probability of the unused spectrum, and meanwhile the detection probability should be maximized as much as possible. This is referred to as constant false alarm rate (CFAR) principle [
13,
19]. On the other hand, if it is required to guarantee a non-interference probability to the primary users, the probability of detection should be set to a high level (e.g., 95%) and the probability of false alarm should be minimized as much as possible. This is called the constant detection rate (CDR) principle [
13,
19]. By the similarity of (
9) and (
12), it is clear that the derivation of the threshold values for CFAR and CDR are similar, so the analytic results derived by assuming CFAR based detection can be applied to CDR based detection with minor modifications and vice versa. From now on, we will mainly focus on the discussion of CFAR threshold, since similar conclusions follow directly by minor changes.
Let us introduce some special functions and related notations for ease of reading. The complement of the standard normal distribution function is often denoted as
, i.e.,
and is simply referred to as
Q-function, in the context of engineering. This represents the tail probability of the standard Gaussian distribution. The Gamma function and regularized upper incomplete Gamma function are defined as
for
, respectively. The more complicated Beta function and Beta distribution function are respectively listed below
for
,
and
. A well-known relation between Beta and Gamma function is
We simply use
,
and
to present the inverse functions of
,
and
respectively.
3. Energy Detection Performance Using Estimated Noise Variance
As already mentioned in the introduction, the exact noise variance is generally unavailable; even historic records are sometimes out of use, due to timely changes of thermal conditions and environmental conditions, and so on. So, practically the threshold values in (
9) and (
12), or the approximating cases (
10) and (
13), are usually calculated from an estimated noise variance
to a certain extent. In this section, we numerically study the performance of energy detection by replacing the noise variance in these formulas by an estimated noise variance
. Specifically, we investigate the difference
by numerical experiments.
We want to find out the performance of energy detection by simply replacing the exact noise variance
in (
9) and (
12) with the estimated noise variance
, i.e., calculate the thresholds as
and then by (
7) and (
11) respectively the resulted performance probabilities are
Similarly, in the approximating case, the CFAR threshold
by replacing with the estimated noise variance
is
which is corresponding to (
10). Thus the resulted performance probability is
Due to the CFAR and CDR principles having an essentially similar structure, we actually investigate the CFAR case only, i.e., by formulas (
19) and (
21) to check the evolvement of
as the predetermined
varying from 0 to 1, or for a fixed
as the number of samples tends to infinity. A technical treatment of estimating
in the following experiments is replacing it by the corresponding empirical average
over a class of sample paths.
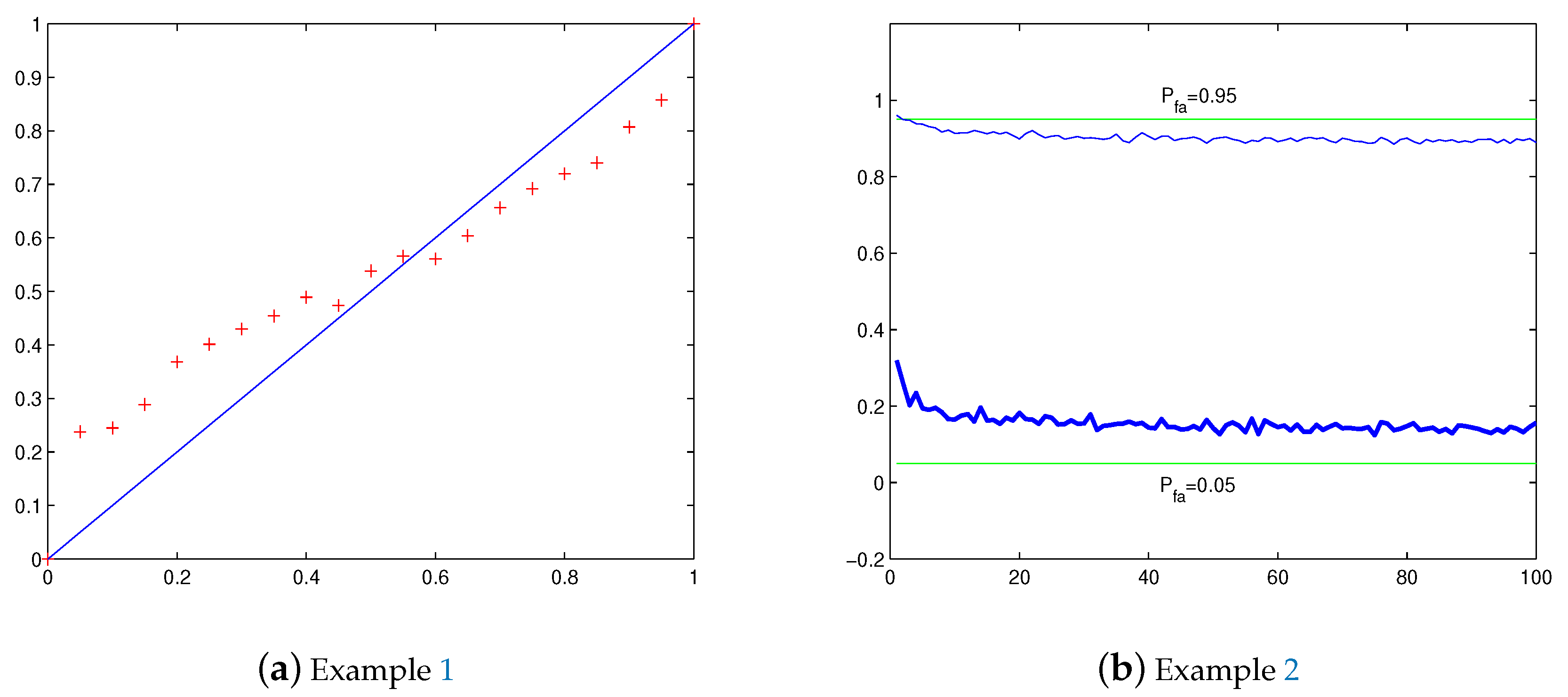
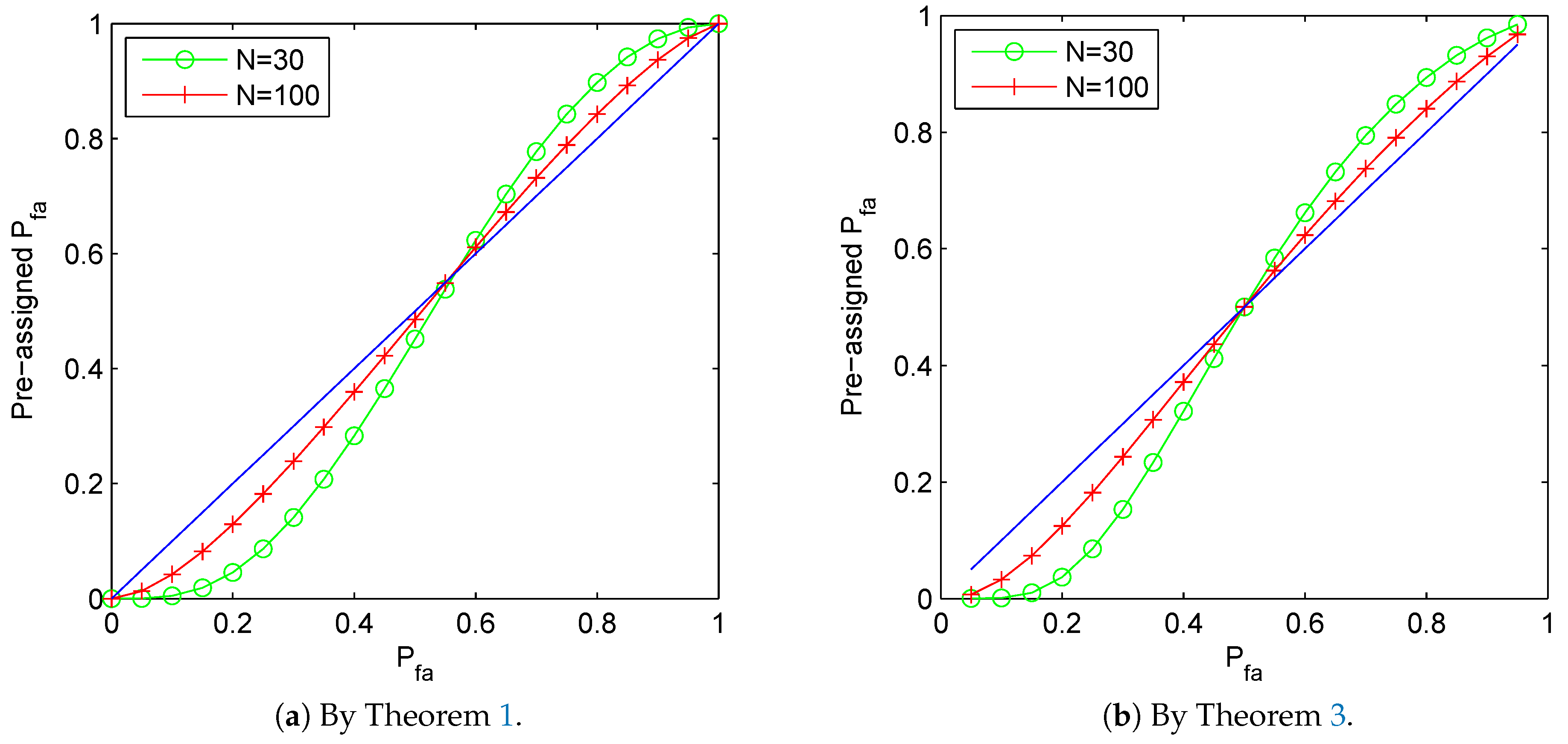
Example 1. We first investigate the difference between and the predesigned as changes along the interval with M and N fixed. In model (1), let and . Consider a given false alarm rate , we use iid Gaussian noises to estimate the variance , and then substitute in (19) to derive the threshold . The energy detection performance by the obtained threshold is evaluated by the corresponding false alarm probability by (21). As aforementioned, it is important to check whether . In order to estimate , repeat independently the aforementioned procedure and calculation for 600 times to calculate the average false alarm probabilityto serve as an empirical approximation of , where denotes the calculated probability along the i-th sample path . We let , totally 21 points, to do an experiment. The result is shown in Figure 2a, where is plotted by ’+’. We see that when is close to 0, while when is near 1. Example 2. This time we investigate the difference between and the predesigned with a fixed as tends to infinity. Still let in model (1). With the same procedure of Example 1 to calculate by 600 independent sample paths. We let and respectively, and to do an experiment. The result is shown in Figure 2b, where for is plotted by thick line, and by ordinary line. We see that when , and when . Furthermore, it seems that , and thus , for a fixed has a limitation as tends to infinity. The phenomena discovered by these numerical experiments will be explained in the next two sections by developing an exact formula for and an upper bound for its variance. Nevertheless, the case for approximating CFAR threshold has also been analyzed meanwhile.
4. Calculations of and
In this section, we will derive explicit formulas for the expectation of
given by (
19) and (
21) with respect to predesigned false alarm probability
, and the expectation of
given by (
23) and (
24). Moreover, some basic properties are deduced analytically and numerically, which further explains some discoveries in the former section.
Denote
as the estimated noise variance from the reference channel (Ch
) known to be vacant, where
N is the number of samples used to estimate noise variance. Denote
u by (
3) as the energy detection test statistics from the channel of interest (Ch
). Here we assume the number of samples, as aforementioned, used to perform spectrum sensing is
M.
Notice that the estimated noise variance,
, is a random variable itself, the probability of false alarm or detection is conditioned on one observation of the random variable, e.g.,
y. Let us consider the case of CFAR. By (
7) and (
19), the probability of false alarm can be written as
where
is the threshold value calculated from (
19) by given false alarm probability
, and
y is a realization of random variable
Y.
Since
given by (
25) is a random variable depending on
y, it is natural to consider its expectation with respect to
y. Let us summarize a theoretical result regarding
as a theorem below.
Theorem 1. When using estimated threshold of CFAR given by (19) for model (1), we havewhere and Beta distribution is defined by (18). Proof of Theorem 1. By integrating (
25) over the PDF of
Y, the expected probability of false alarm can be derived as
where we use the fact
in the second step. Letting
, we derive
Differentiating by
x, we have
Introduce transformation
. By the fact that
, we proceed as
where
is Beta function in (
17). Integrating (
30) over
, by noticing
for
in (
27), we derive
Let
. The integral turns to be
where
is the Beta distribution function in (
18). In the second step, we use the transformation
. □
Based on Theorem 1, we conclude a further theoretical discovery as the following theorem, which is actually being pointed out in the numerical experiments of the former section.
Theorem 2. There exists a such thatwhere is defined by (27), and can be calculated by (26). Proof. Let
to be brief. Introduce a function
. By (
26), we have
where
. By the fact
, i.e.,
, we have used the following calculation
in the above second step. Note
when
, so
by (
34). Note further
if
, by (
34) we have
. Together with the fact that
, we know that
is negative somewhere.
To find more information about the sign of
, we recall the famous Stirling’s approximation formula for Gamma function (see page 400 of [
21]):
where
, and an inequality (see page 88 of [
21]):
where
and
.
By (
35), we get
with
. Thus,
By (
36),
Together with the facts that
and
for
, we declare that the derivative of
at
p, corresponding
, i.e.,
.
On the other hand, by noticing the increase rates of function
and
in (
34), we know that
at most has two zeros in
. Hence, we conclude that
starts as a positive value
, then decreases to a negative minimum, and finally increases to a positive value
. This means that
starts as 0 increases to a positive maximum, and then decreases to negative minimum, finally increases to 0, which is just the assertion desired. □
Now let us consider the counterparts for the approximating threshold of CFAR criterion, i.e., the expectation of
given by (
23) and (
24).
Theorem 3. When using estimated threshold of CFAR given by (23) for model (1), we havewhere and . Remark 1. Based on Theorem 3, we now consider the limitation of as M and N tend to infinity for fixed . By (37), for a fixed , we haveif . Thus, if tends to infinity, we derive the discovery in [13]:These properties also hold for since the distribution of tends to be the distribution of . Proof of Theorem 3. Integrating (
24) with respect to
y, and noticing that
, we have
Letting
and
. we derive
For simplicity, introduce
and
. Differentiating
over
x, we get
where
and hereafter denote
A sometimes for brief. It follows
In the second step we use the transformation
to simplify the expression.
Now integrating (
43) over
, and by the fact that
for
in (
40), we find
Let us study the function
before introducing a transformation. Clearly,
Note
and denote
, we derive
for
, and
for
. Thus,
has one unique minimum at
. Hence,
increases from the minimum to
as
, and increases from the minimum to
as
.
Now introduce a transformation for (
44) as
. Based on the above analysis for function
, if the integration region
, then the region for
w turns to be
; otherwise, the region for
v can be divided into two monotonic parts as
and
, and thus, the regions for
w are
and
. Then, for the case
, by the fact that
for
in (
41), we proceed (
44) as
For the case
, similarly,
These finish the proof. □
Corresponding to Theorem 2, we also have:
Theorem 4. There exists a such thatwhere can be calculated by (37). Furthermore, the critical point is close to for large . Remark 2. By Theorem 4, we know that at a point close to . This property holds for since the distribution of tends to that of .
Proof. Let
to be brief. Introduce a function
where
. So, we have
where
,
,
, and
. Clearly,
is corresponding to
, thus,
. Together with the facts that
and
, we know that there exists a
such that
. When
, corresponding to
, clearly,
for
, we have
, and thus
for
, which finishes the proof of the first assertion.
By (
38), i.e.,
we have
Thus, for large
M and
N, we know that the zero of
, i.e.,
, is close to
, which is corresponding to
. This finishes the second assertion. □
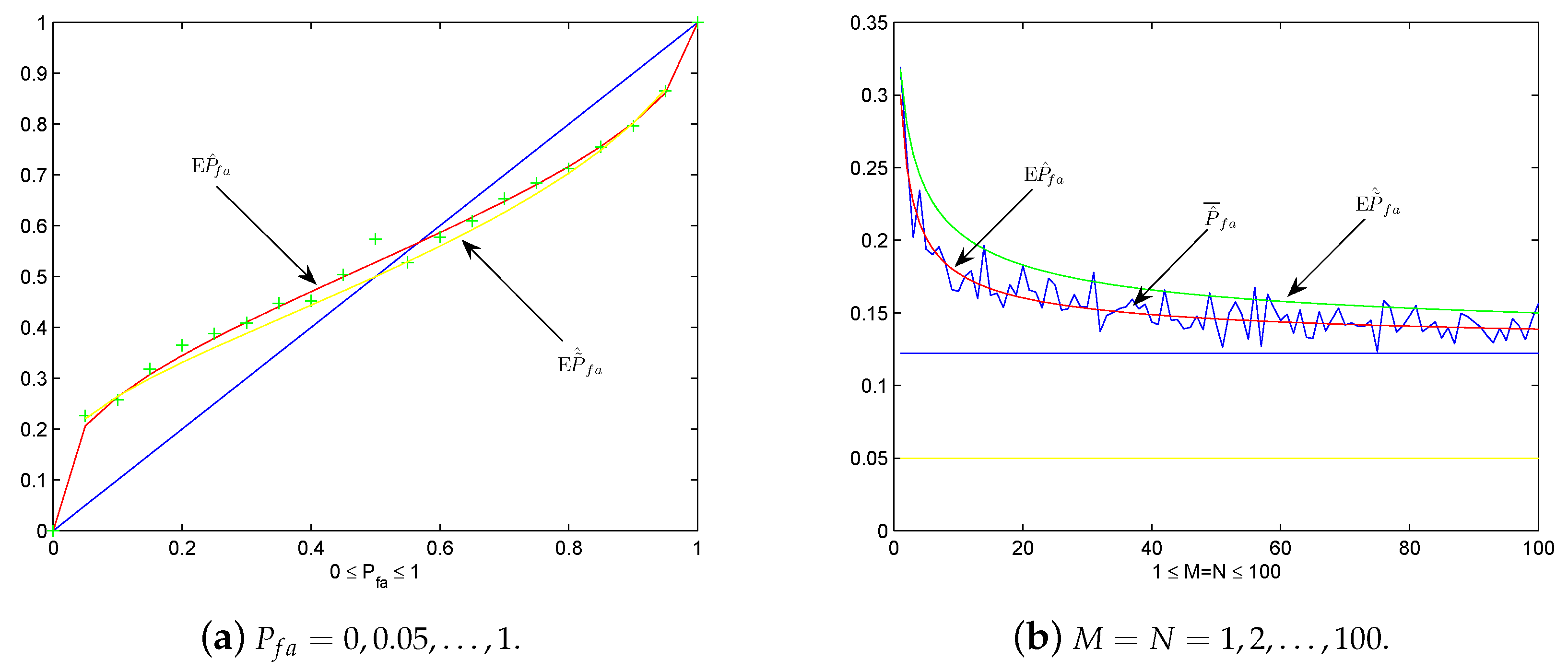
Now let us do some numerical experiments to detect the practicality of these theoretical results. Under the same setting of Example 1, we plot
by ’+’, and
and
as the predesigned
in
Figure 3a. We see that
serves better as the mean value of
than
, which coincides with the fact that the latter is an approximating case. If
is sufficiently large,
approximates
close as desired. Let us analyze more deeply the graphs in
Figure 3a by the discovery in Remark 1. Let
, the approximation of
and
is
when
is large. Clearly,
by noticing
. Graphically, this means the curves of
and
with respect to
pass across the diagonal line in
Figure 4 around
for sufficiently large
. If
, i.e.,
close to 0, then
. In this case, the graphs of
and
with respect to
is close to the diagonal line.
On the other hand, in
Figure 3b we plot
,
and
under the same setting of Example 2 for
. Again, we see that
serves better as the mean value of
than the approximation
. As
changes from 1 to 100,
and
seem tend to the value of the upper straight line in
Figure 3b, i.e.,
, which justifies the observation in Remark 1.
In conclusion, the theoretical discoveries in the above four theorems and two remarks have been verified in these numerical experiments.
5. Upper Bounds of and
After the calculations of
and
, it is meaningful to have some information about the average deviations of
and
from their expectations. Technically, it is found very difficult to find explicit forms for
and
by existing special functions. We have to try to find some upper bounds instead. By the facts that
and
, we have obvious upper bounds as
Thus, the more sharp upper bounds of
and
should be less than
and
respectively. For this target, let us list two propositions and two lemmas for technical preparation.
From the proofs of Theorems 1 and 3, we actually have the following two general results respectively.
Proposition 1. For a real differentiable function ,where and , . Proposition 2. For two real differentiable functions and , We need two more inequalities regarding Gaussian and Gamma distributions respectively as follows. The proofs have been listed in
Appendix A.
Lemma 2. For , By Proposition 1 and Lemma 1, we develop an upper bound for in the following.
Theorem 5. Let , then an upper bound for is Remark 3. Note thatfor , we know that the upper bound in (51) for is really lower than . Proof of Theorem 5. By (
25), we find an upper bound for the the expectation of squared probability of false alarm as
where we use the notations:
and
. By Lemma 1, for
we derive
In order to use Proposition 1, introduce a transformation
. Then, we proceed (
53) as
Clearly, corresponding to Proposition 1,
in (
54). Thus, by Proposition 1, we derive
□
By Proposition 2 and Lemma 2, we develop an upper bound for in the following.
Theorem 6. Let , then an upper bound for iswhere and . Remark 4. Note thatfor , we know that the upper bound in (55) for is really lower than for . Proof of Theorem 6. Letting
,
, and recalling the notations
and
. By (
24), we derive
By Lemma 2, we proceed as
Introduce transformation
, and thus
. Hence, we derive
Clearly, corresponding to Proposition 2,
and
. By the fact
and Proposition 2, we have the formula (
55). □
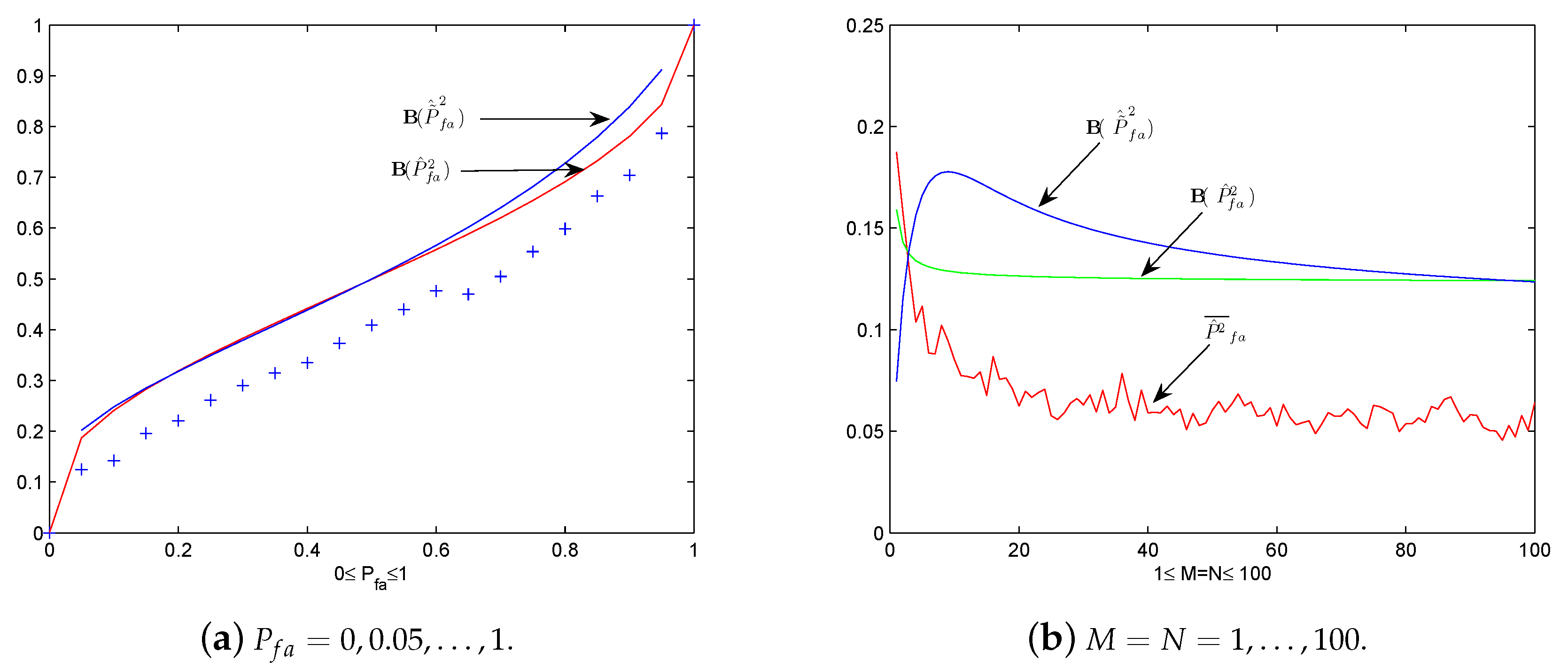
Now let us do two numerical experiments corresponding to examples in
Section 3 to check how the two upper bounds work. The average squared false alarm probability is calculated over 600 sample paths by
to serve as an empirical approximation of
, where
denotes the calculated probability along the
i-th sample path
. Under the same setting of Example 1, we plot
by ’+’,
and
as
changes from 0 to 1 in
Figure 4a. It seems that
is the better one, especially in the case
. Under the same setting of Example 2, by letting
we plot
,
and
for
in
Figure 4b. The two upper bounds seem not quite satisfied since both of them do not tend to
as
M (or
N) tends to infinity.
6. New Thresholds Based on and
In this section we derive new thresholds to guarantee the expectation or in the approximation formula version, , by the help of Theorems 1 and 3, respectively.
The threshold
given by (
19) constructed by using estimated noise variance is actually a random variable itself. This leads to the fact that the resulted false alarm probability
given by (
21) is generally different from the predesigned probability
. It is found in Theorem 1 that the expected value of
is probably different from the predesigned probability
. For instance, let
and
,
as in Example 1, by Theorem 1,
for the threshold given by (
19), i.e.,
where
is estimated by
independent observations. Obviously, the resulted expectation
is much bigger than the predesigned false alarm probability
. This means the threshold is selected too low to guarantee the predesigned false probability
in an average sense. If we want the expectation
, the preassigned probability
for energy detection should be suitably smaller. Next we analyze how small the preassigned probability
should be and then derive a new threshold to guarantee
.
For a given alarm level
, say
, in order to derive a threshold to guarantee
, it is found that the
x in (
26) should be
by solve the target equation. Then by
described in Theorem 1, the preassigned initial threshold for energy detection should be
. In other words, due to the fact that the noise variance is estimated by finite samples of noise, if we still want the false alarm rate less than
, we may need to be more cautious to select the threshold for energy detection. For the simple example discussed above, i.e.,
,
, if we want
, the preassigned false alarm rate should be approximately
, which is much smaller than the desired rate
. However, if the sample number
N increases to 100, the preassigned false alarm rate could be
. As the sample number
N increases, the preassigned rate approaches to
itself.
It is plotted in
Figure 5a how the cautious preassigned false alarm rate
should be under the setting
and
, for the sequence
. It is clearly shown in the figure that the preassigned false alarm rate
should be much smaller than the value
is designed to be. As the sample number
N for estimation increases, the preassigned false alarm rate
approaches to the value of
.
Consequently, by the value of
x the derived new threshold is given by
where
denotes the inverse function of
. By formula (
26), we have
This means by this new threshold the expected false alarm probability is just the predesigned false alarm probability
. Hence, this new threshold is more accurate to serve as CFAR threshold for energy detection when using estimated noise variance.
Similarly, for a given alarm level
, say
, we derive a threshold to guarantee
. Denote
. It can be solved by (
26) that
with
,
,
and
. Observe that
, it follows that
. Then by
stated in Theorem 3, it is clear that the preassigned false alarm rate should be
. It is plotted in
Figure 5b how the cautious preassigned false alarm rate
should be under the setting
and
, for the sequence
. It is clearly shown in the figure that the preassigned false alarm rate
should be much smaller than the value
is designed to be. As the sample number
N for estimation increases, the preassigned false alarm rate
approaches to the value of
.
Consequently, by the value of
the derived new threshold is given by
Then, by Theorem 3, we have
Hence, this new threshold is much more accurate in an average sense than the empirical threshold simple replacement for energy detection when using estimated noise variance.
7. Conclusions
When using noise variance to set a CFAR threshold of energy detection for spectrum sensing, the derived threshold itself is a random variable. Thus, the resulted probability of false alarm is probably different from the predetermined false alarm probability
. In this paper, we analyze some basic statistical properties of the resulted probability of false alarm
given by (
21) and its approximating case
given by (
24), and then some more suitable CFAR thresholds of energy detection are proposed. Specifically, we first deduce explicit descriptions for the expectations of
and
by Theorems 1 and 3 respectively in
Section 4, and then some straightforward properties are established. These actually answer the first question we proposed in the introduction. Second, two upper bounds of
and
are derived by Theorems 5 and 6 respectively in
Section 5, due to the difficulty to find exact explicit forms by known special functions. These answer the second question proposed in the introduction partially as well. Third, with the help of Theorem 3, the limitation of
or
for
as
M or
N tends to infinity is analyzed in Remark 1, which answers partly the third question in the introduction. Finally, new CFAR thresholds are proposed by assuring that
or
equals the predetermined false alarm probability
in
Section 6. All analytical results derived in this paper are regarding the CFAR threshold. However, as a matter of fact, similar results hold for the CDR case.
For further consideration, it is of interest to describe explicitly and . This means that a more cautious thresholds setting is possible. Observe that the CFAR and CDR thresholds are considered separately in this paper, it is crucial to consider CFAR and CDR thresholds synchronously in energy detection to achieve low false alarm probability and high detection probability simultaneously.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}