Energy Efficient Hardware and Improved Cluster-Tree Topology for Lifetime Prolongation in ZigBee Sensor Networks

 , ,
, ,
Abstract
:1. Introduction
2. Background
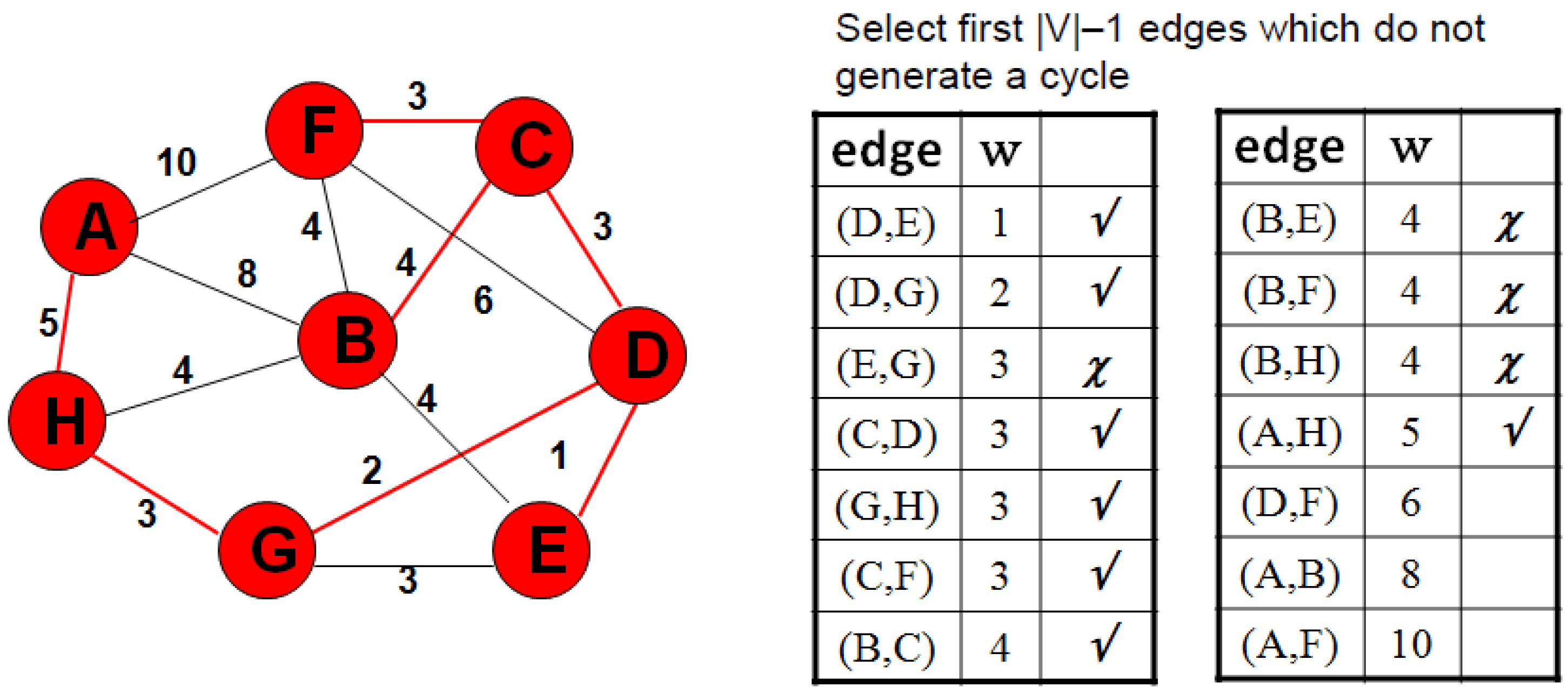
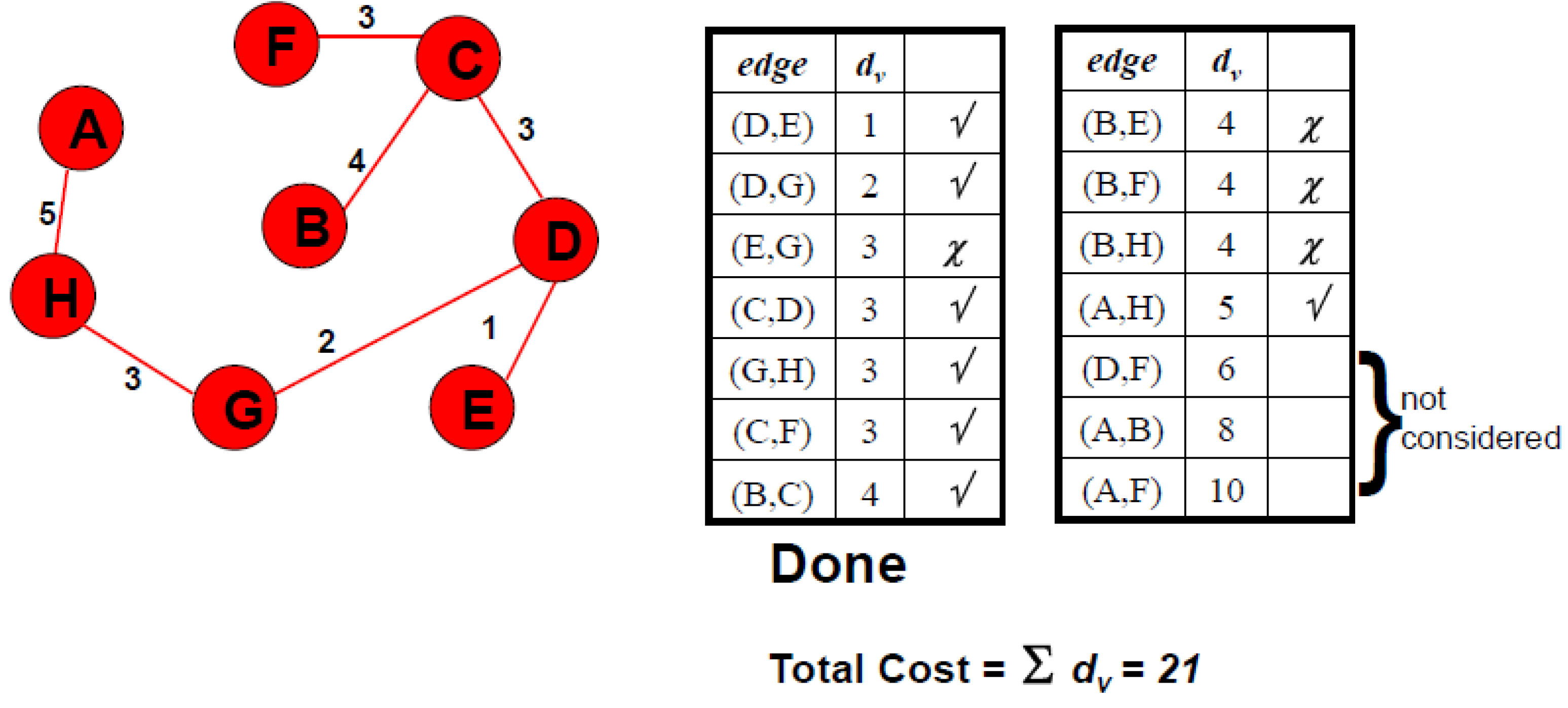
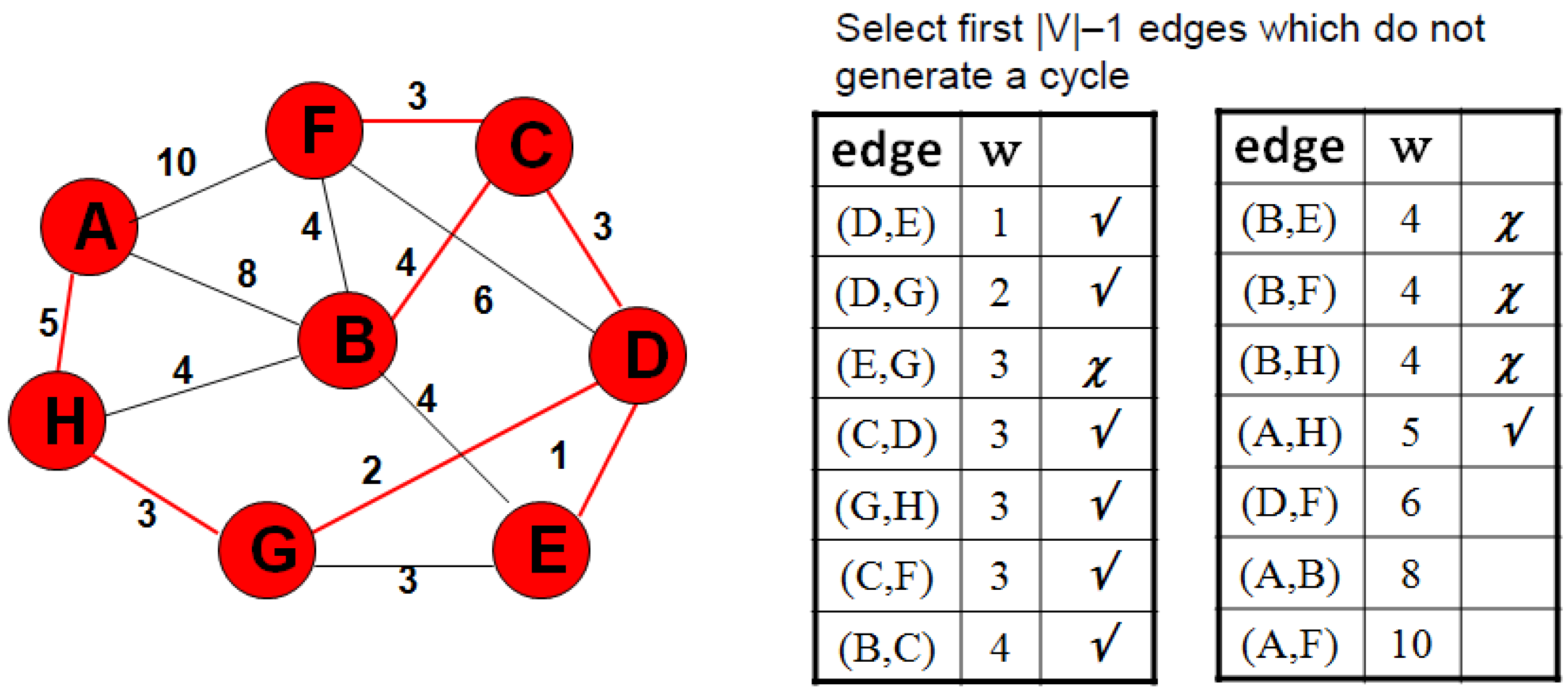
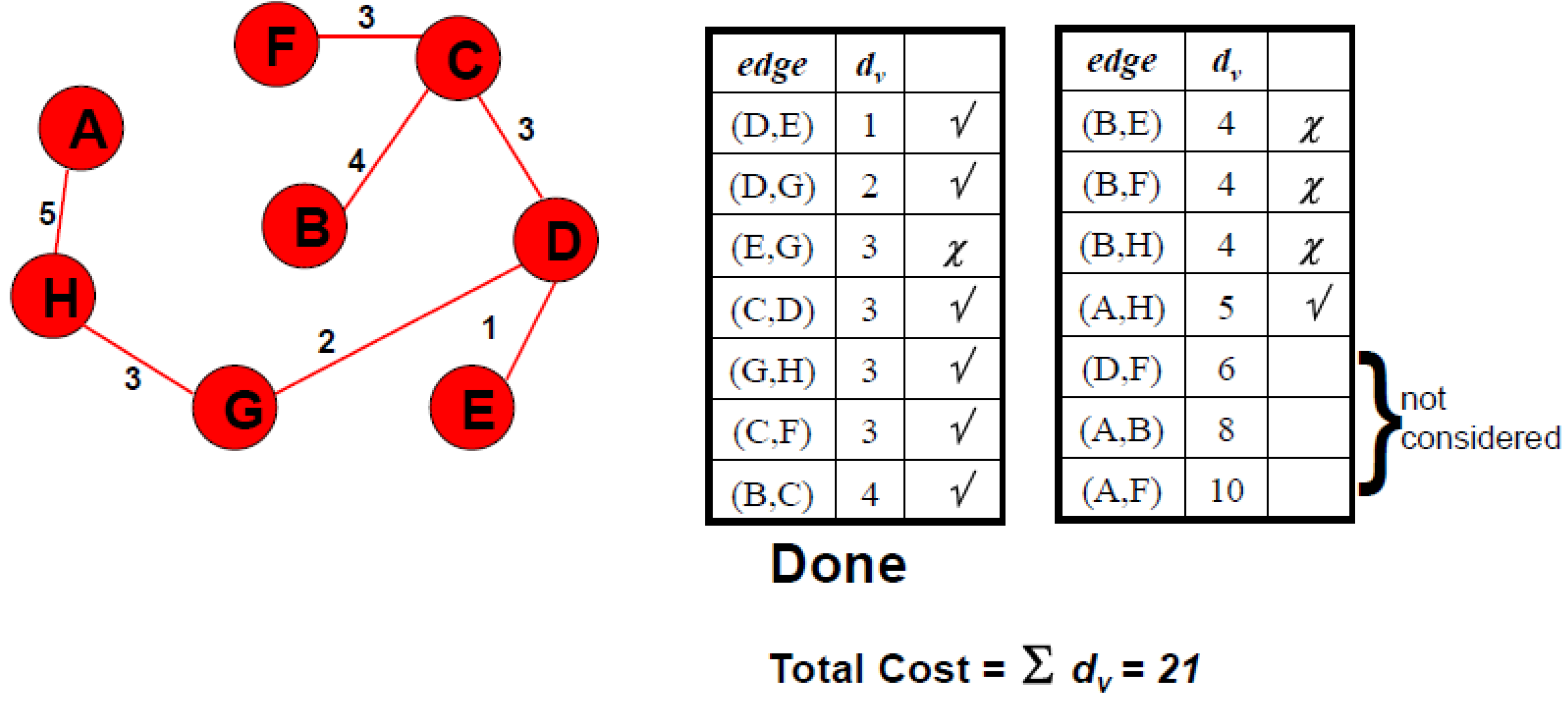
2.1. Minimum Spanning Tree
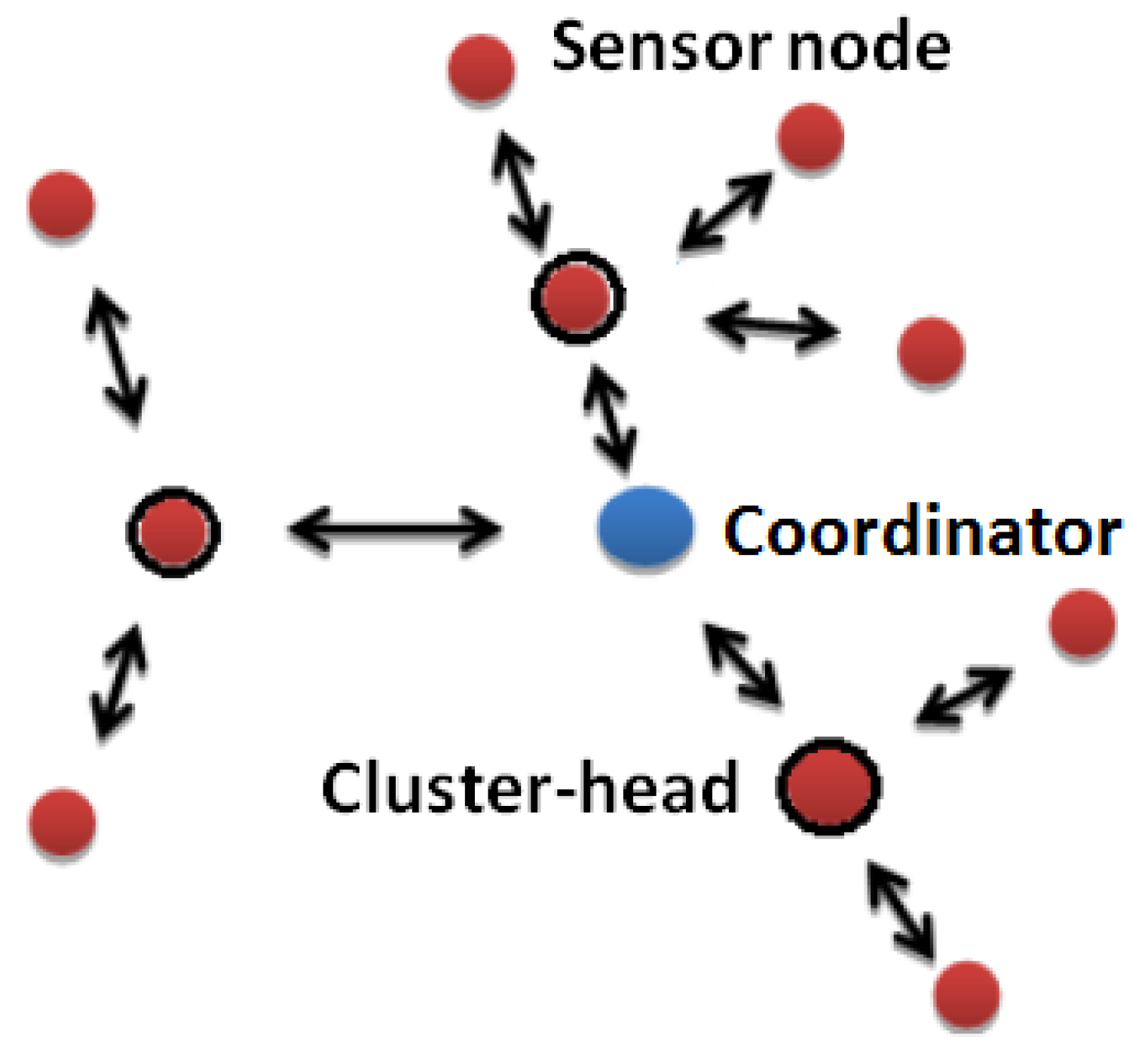
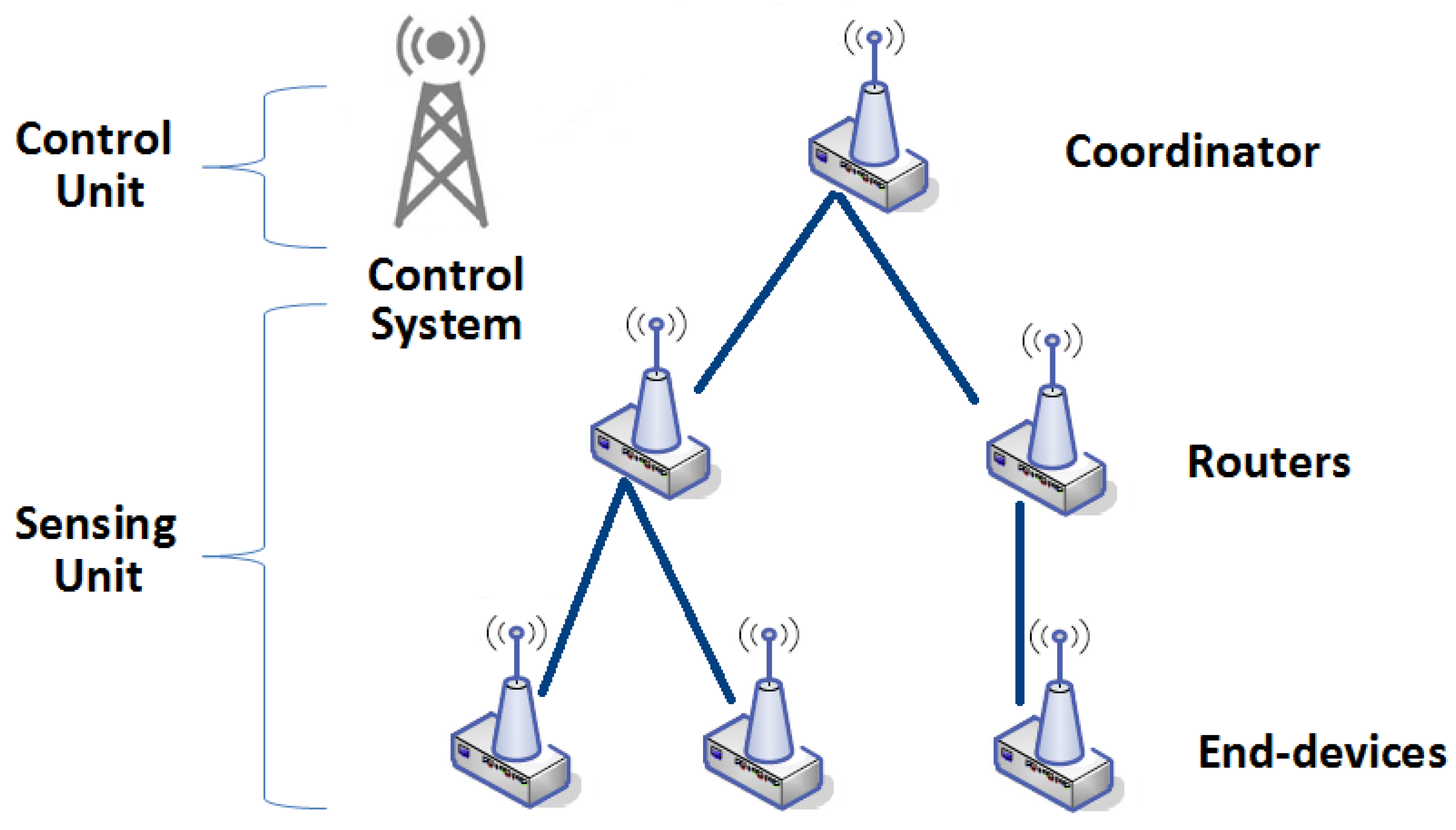
2.2. ZigBee Network
3. Hardware and System
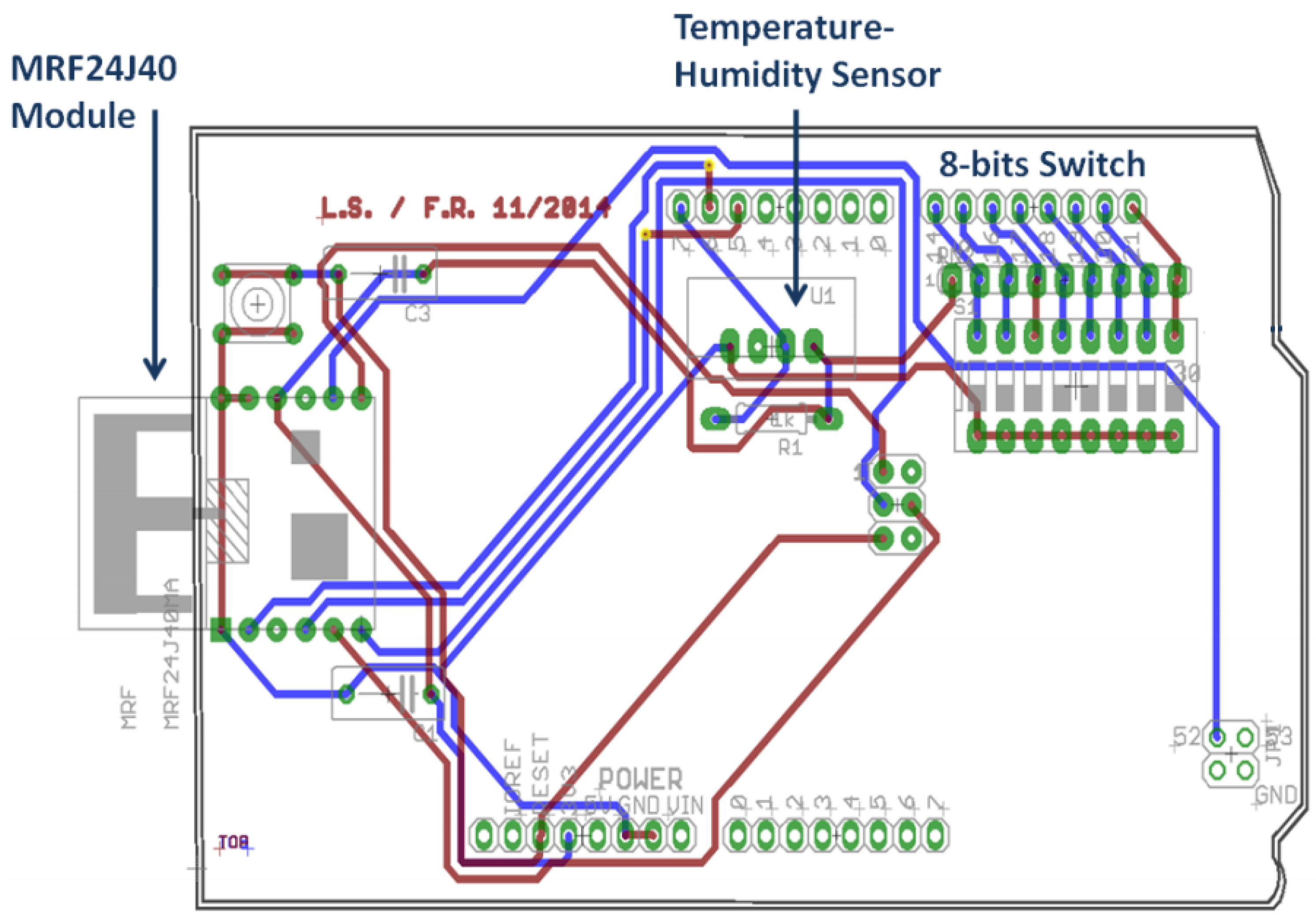
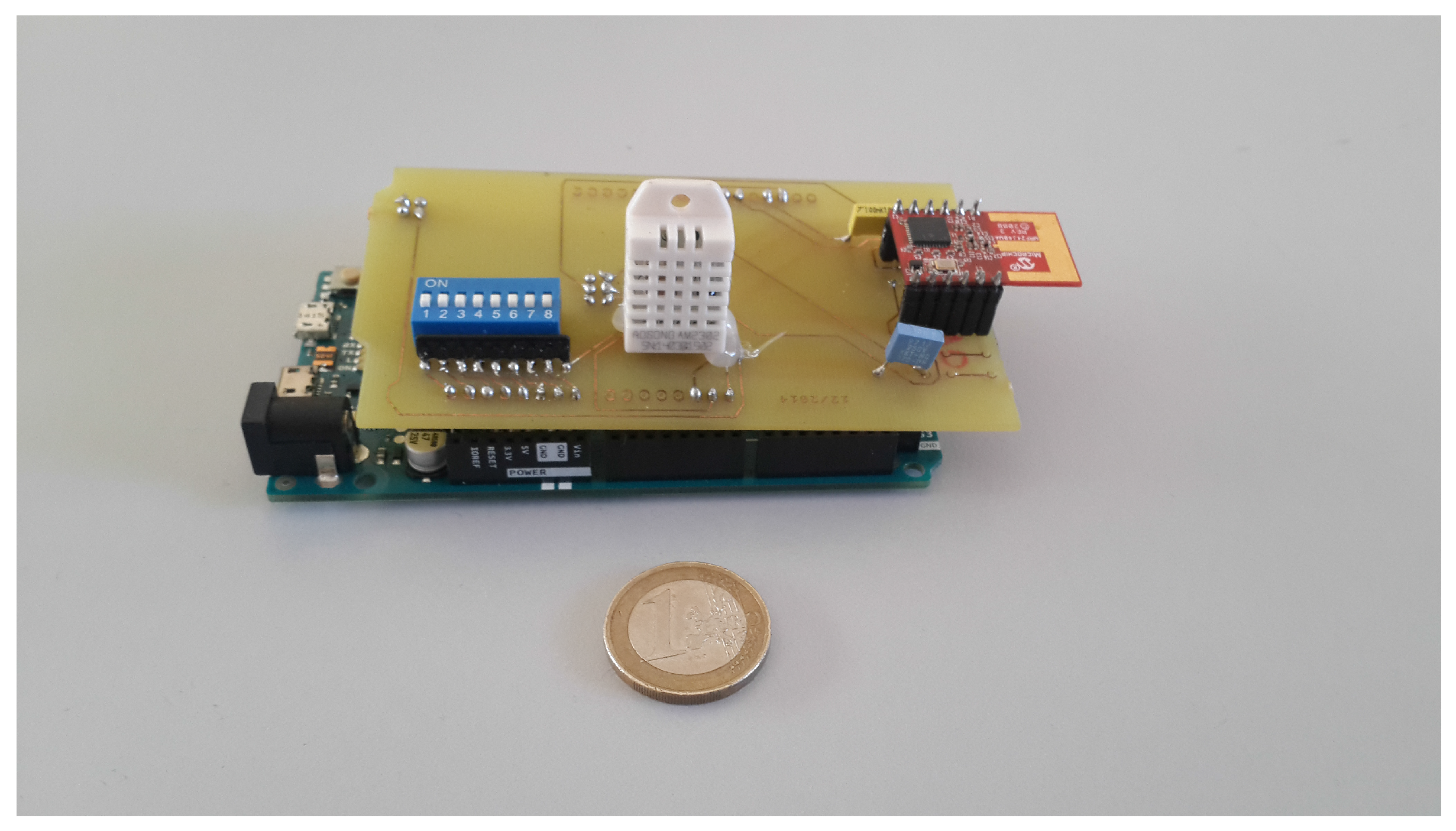
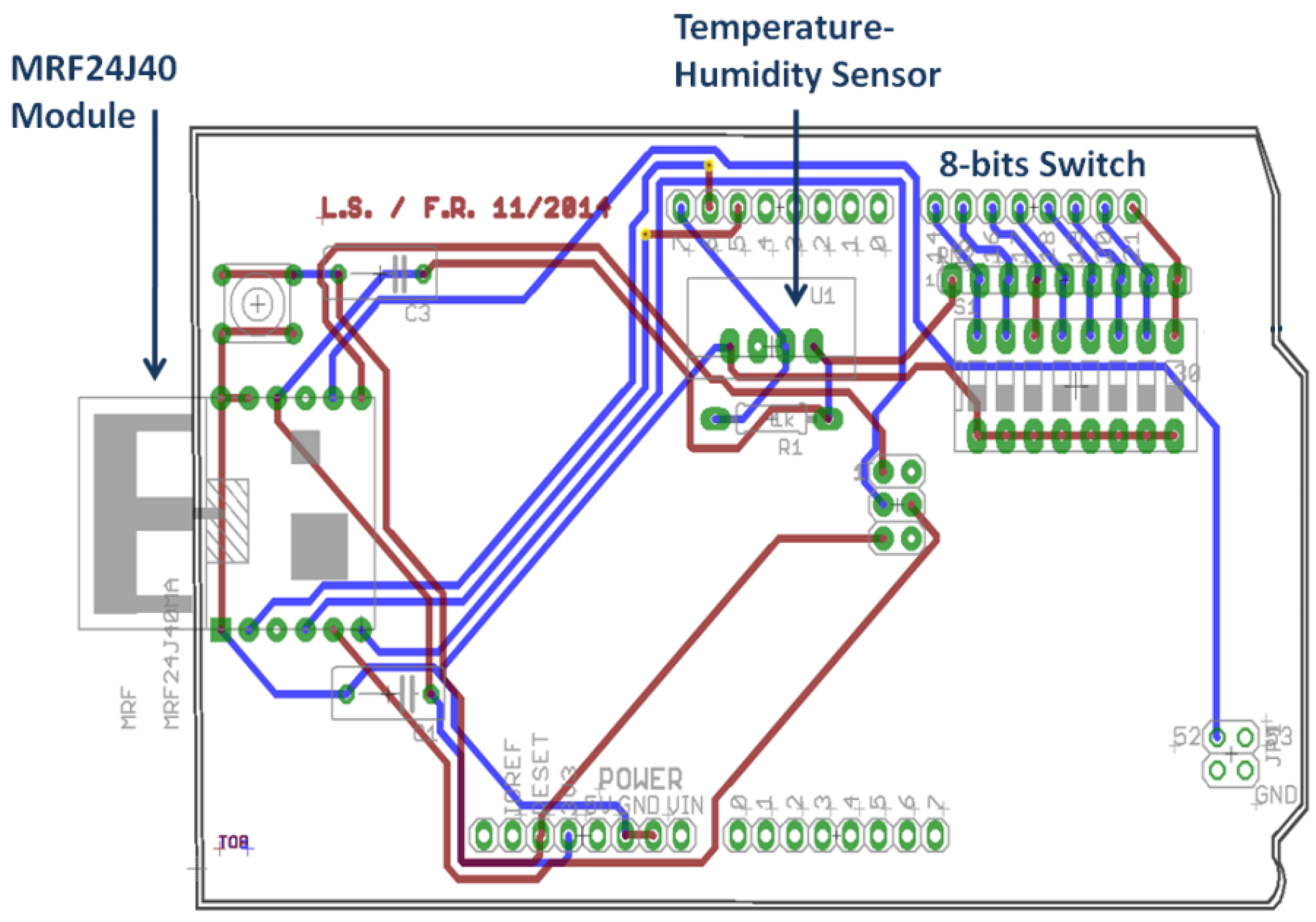
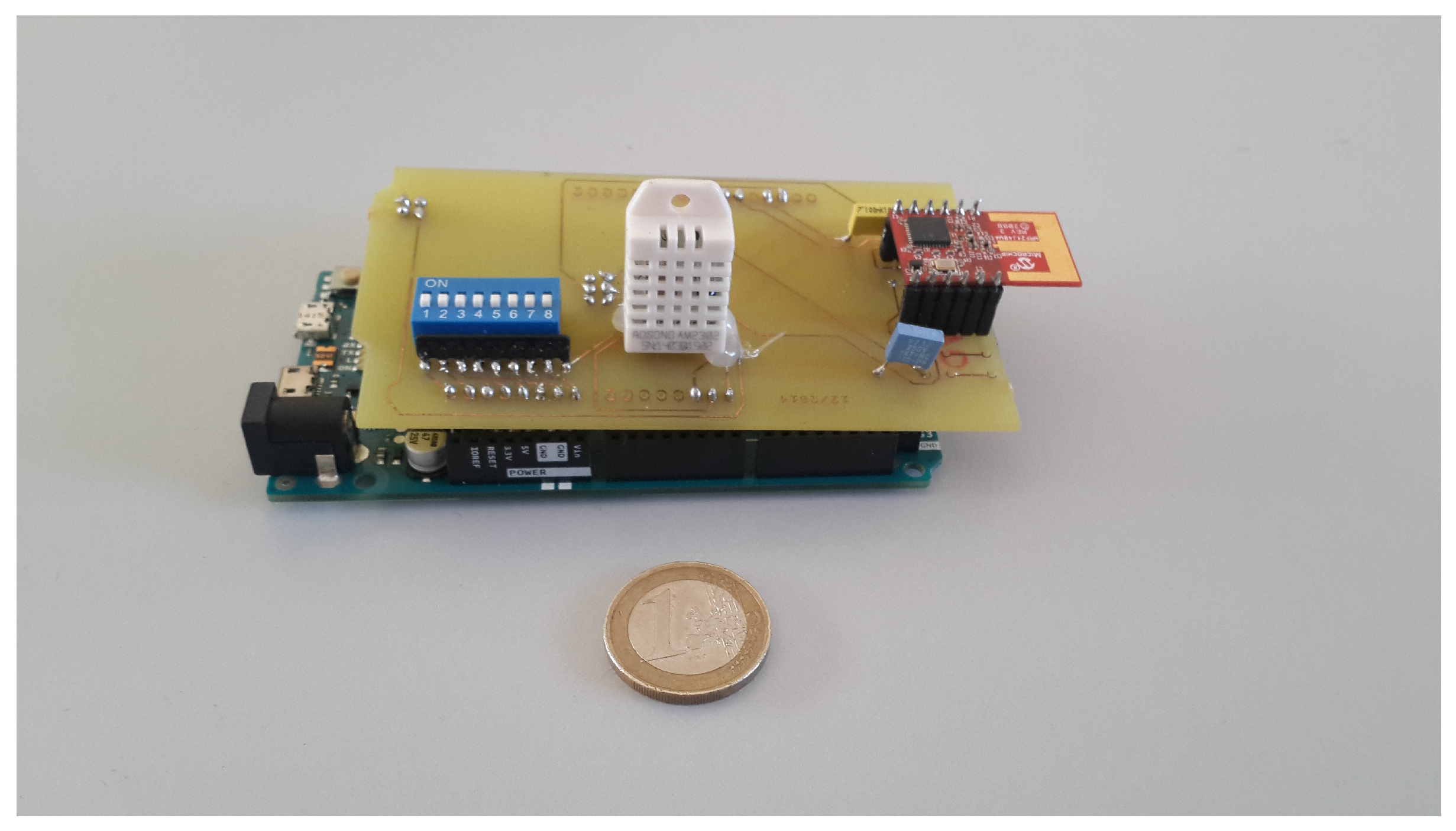
3.1. Hardware Architecture
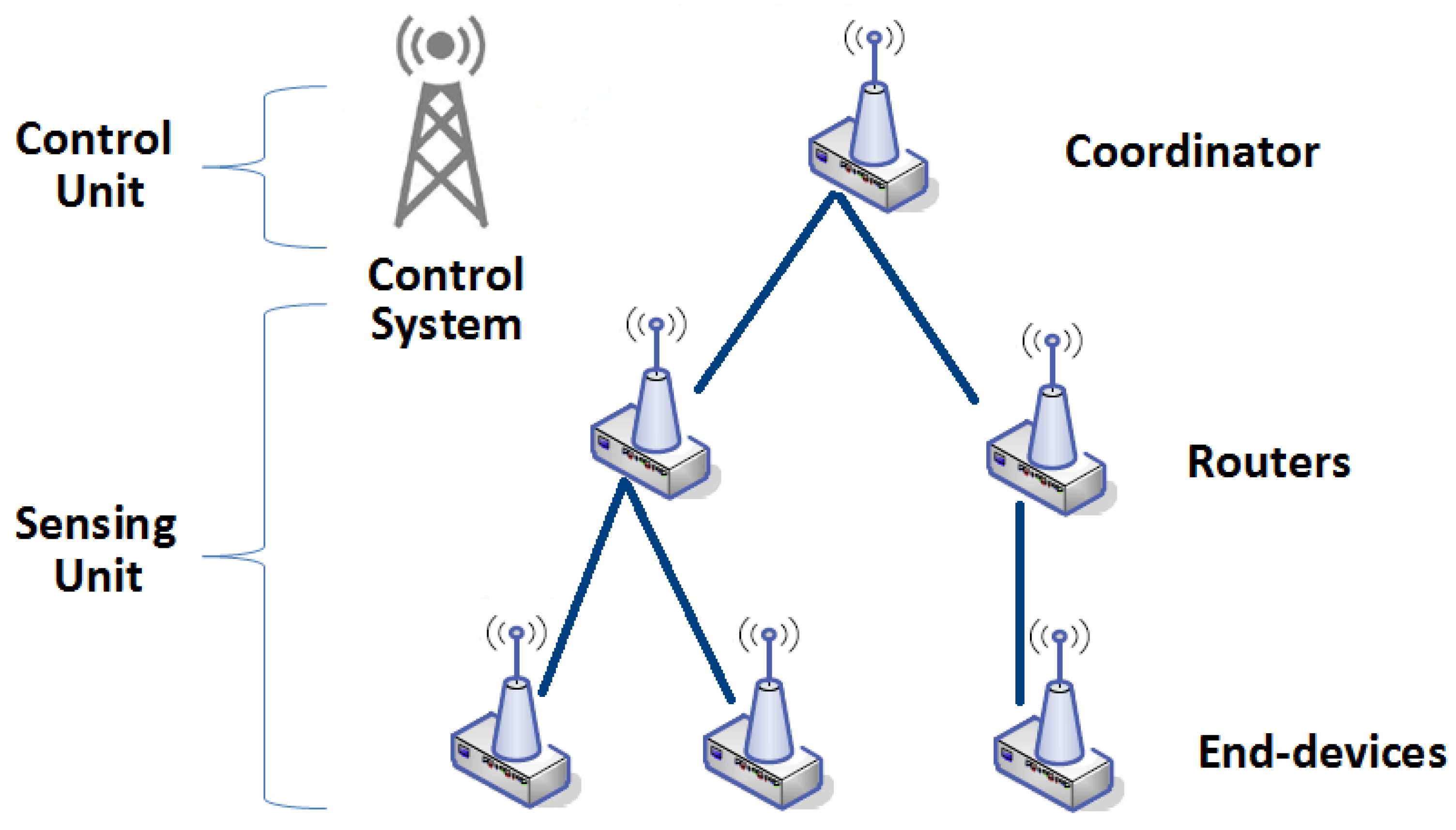
3.2. System Overview
3.2.1. Sensing Unit
3.2.2. Control Unit
4. MSCT Topology
4.1. Indoor Propagation Models
4.2. MSCT Creation
| Algorithm 1 Minimum Spanning Tree Construction Algorithm |
| Require: Graph with N nodes Ensure: Minimum Spanning Tree T
|
4.3. MSCT Topology Control
- When a node sends an association-request, the coordinator adds the node to the network (assigning the PAN id), but not to the topology (no address assigned yet). Thus, during a time , the coordinator does not create the topology, but only receives association-requests from nodes to store them in a table.
- All nodes added in the network calculate the weight of connections with their neighbors and send this information to the coordinator.
- After time has passed, the coordinator constructs a map containing all nodes that joined the network, as well as their neighborhood tables. Thus, it creates the topology following Algorithm 1 steps.
- After the construction of the topology, the coordinator defines a period of time where the association-requests are received and stored in order to face any change of topology. This process allows the saving of energy by reducing the computational cost.
- The algorithms for the topology construction and control are executed at the coordinator node. The energy of the sensor nodes is saved for sensing, transmitting and routing tasks.
- The total cost of transmissions in the network is minimal.
- Topology maintenance is executed periodically, contrary to cluster-tree or mesh, where it is calculated after any change in topology.
| Algorithm 2 Network Operations at the Coordinator |
|
5. Performance Evaluation
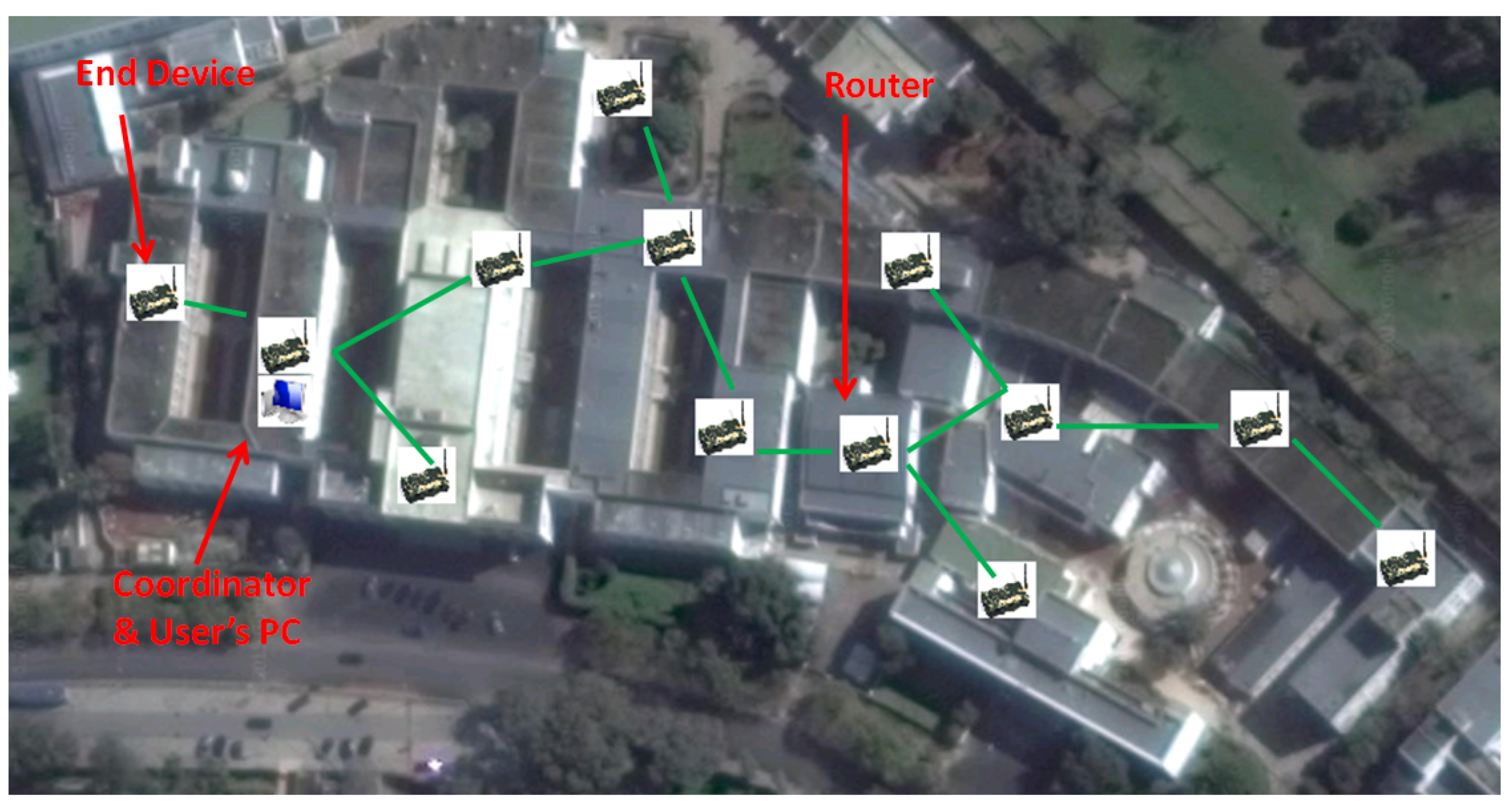
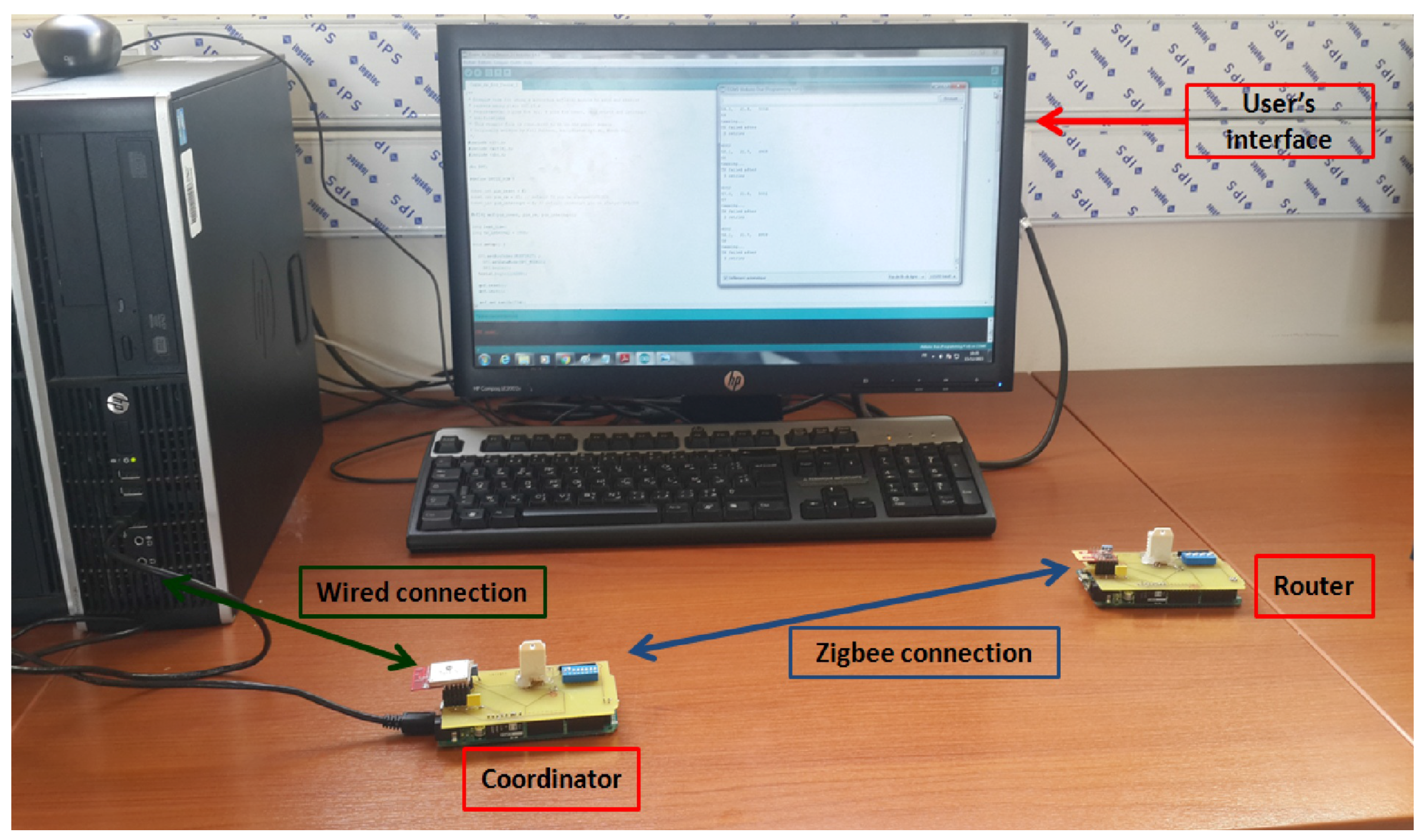
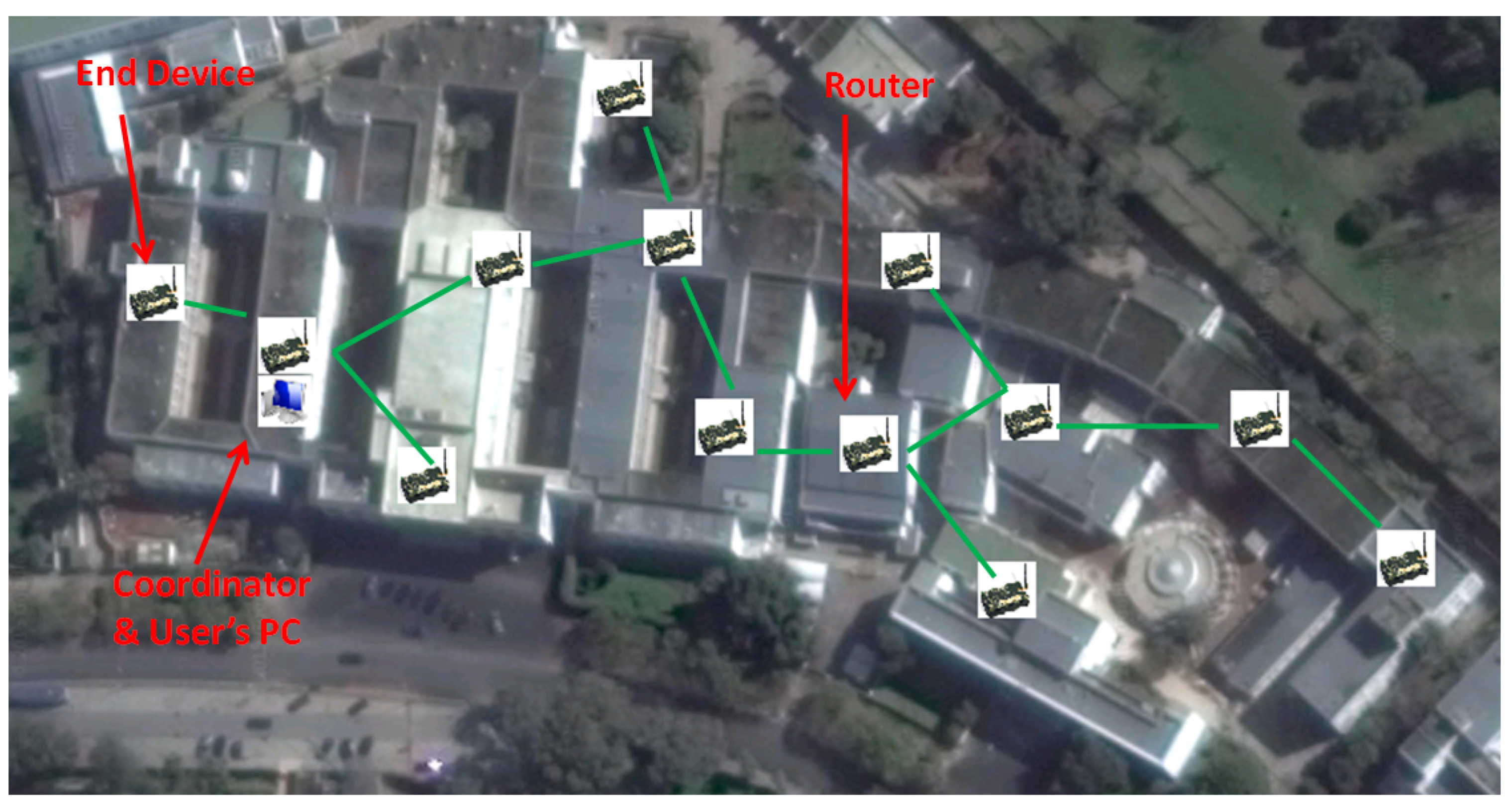
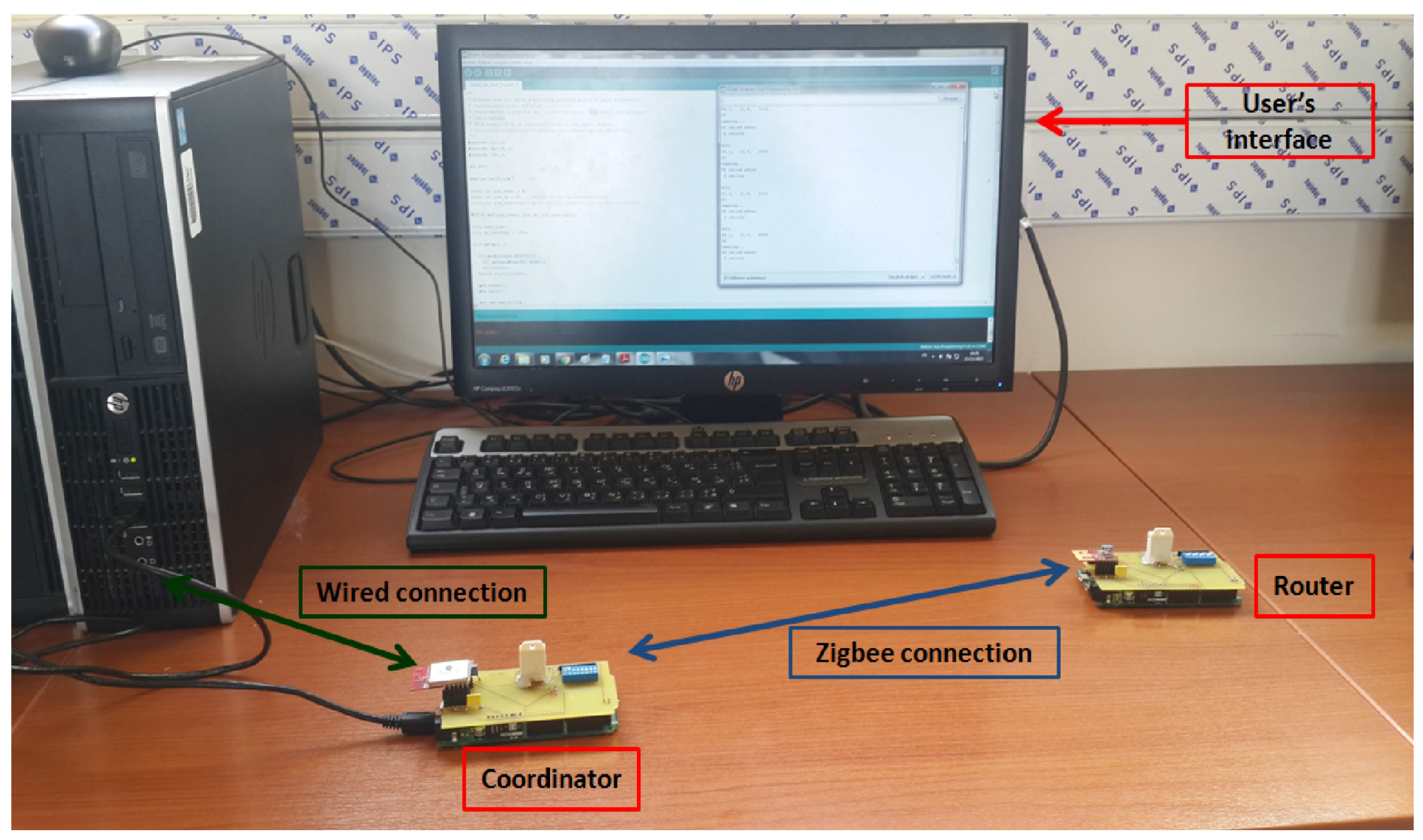
5.1. Experiments’ Scenario and Parameters
- (i)
- The wireless connection will consume much energy because all of the network’s data will be sent through this connection.
- (ii)
- To ensure that collected data coming from nodes arrive safely at the control system.
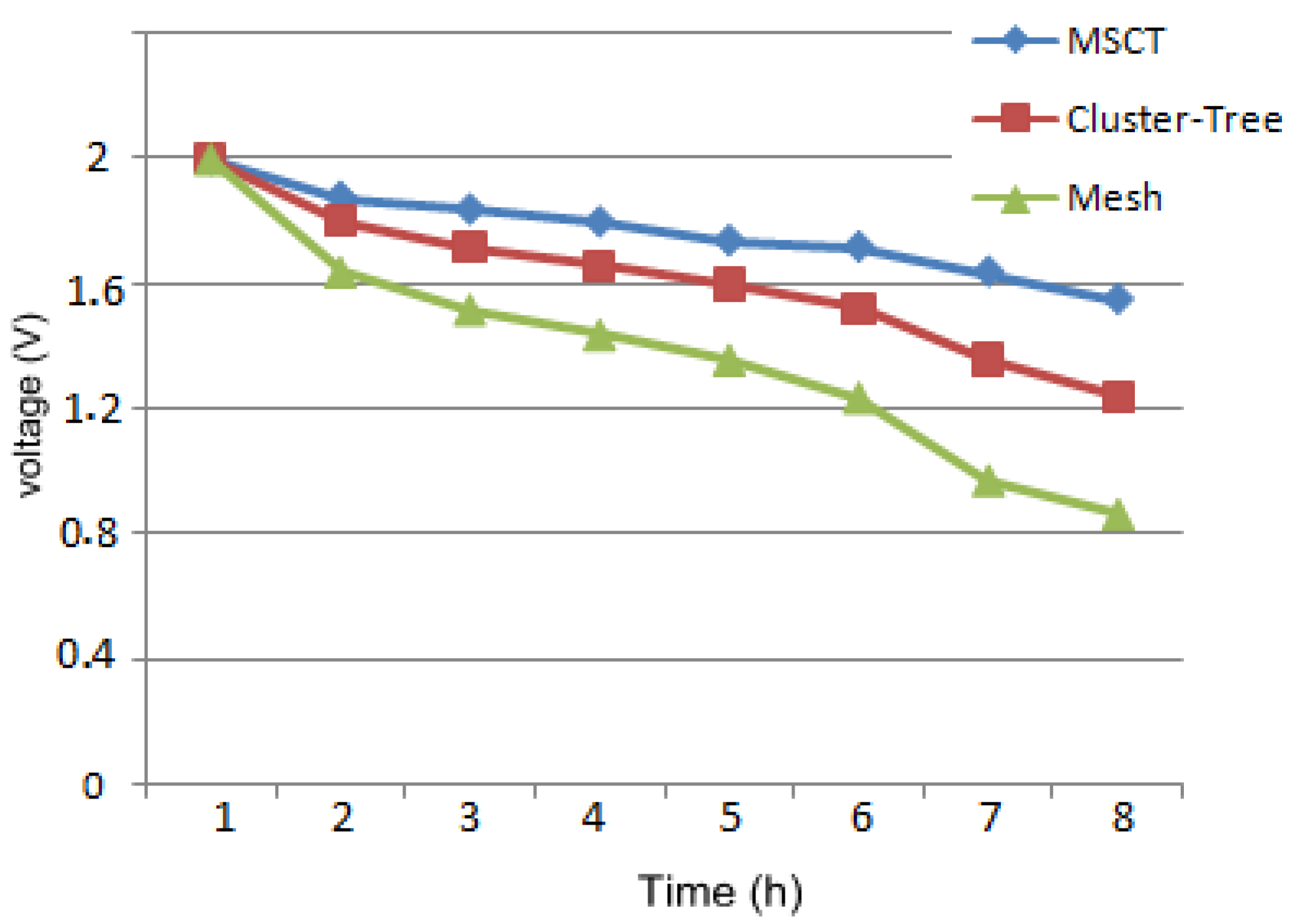
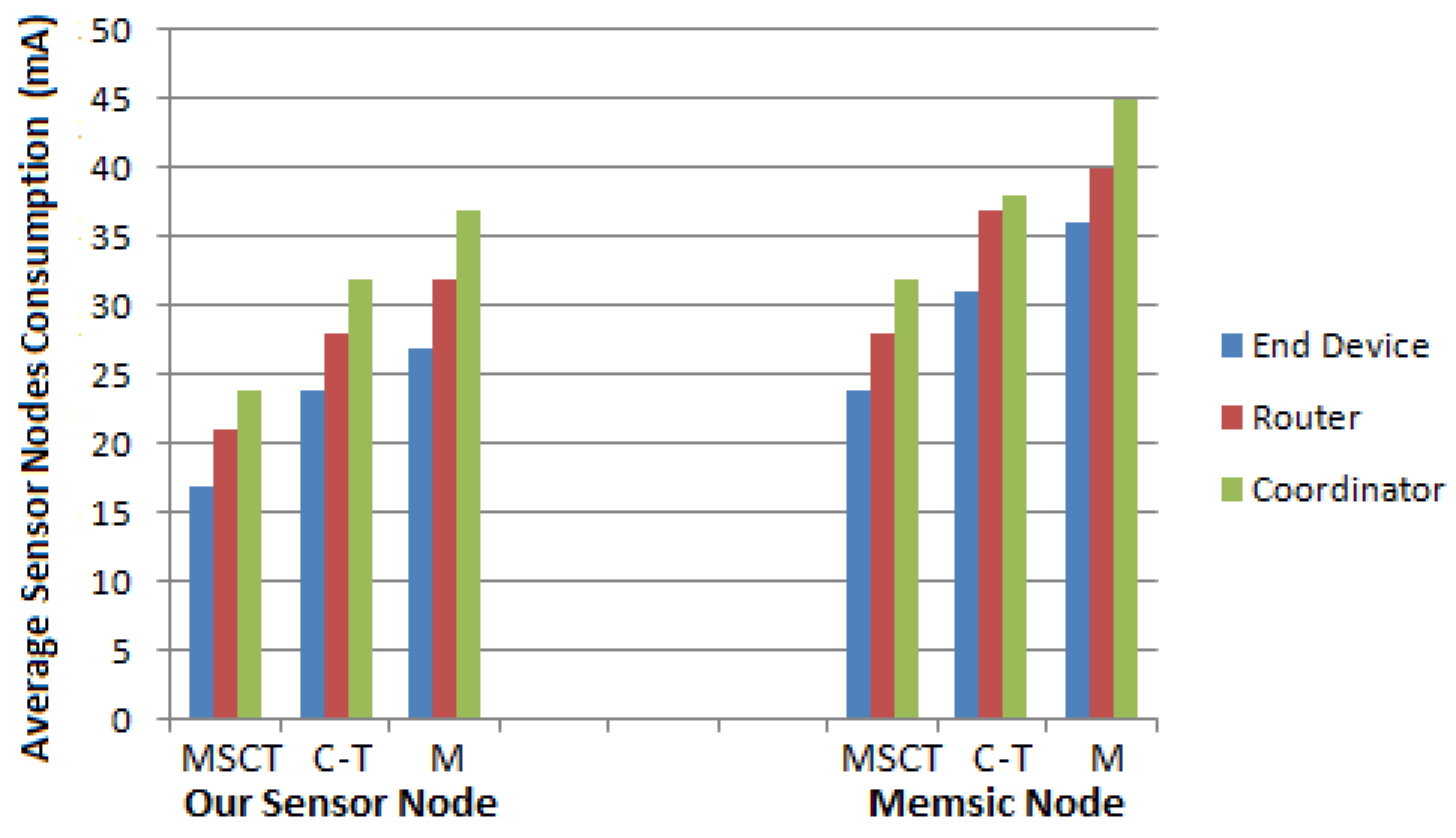
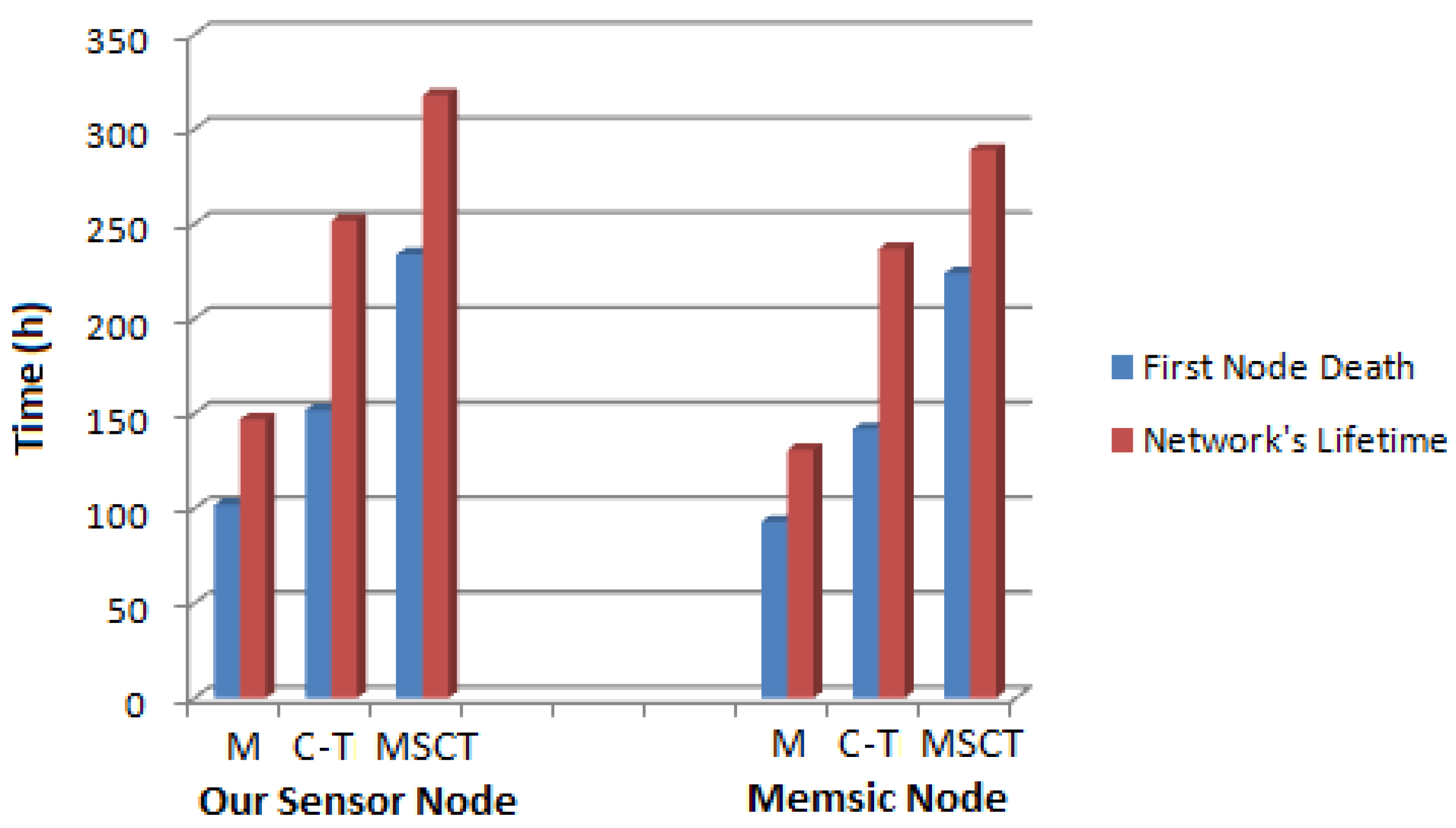
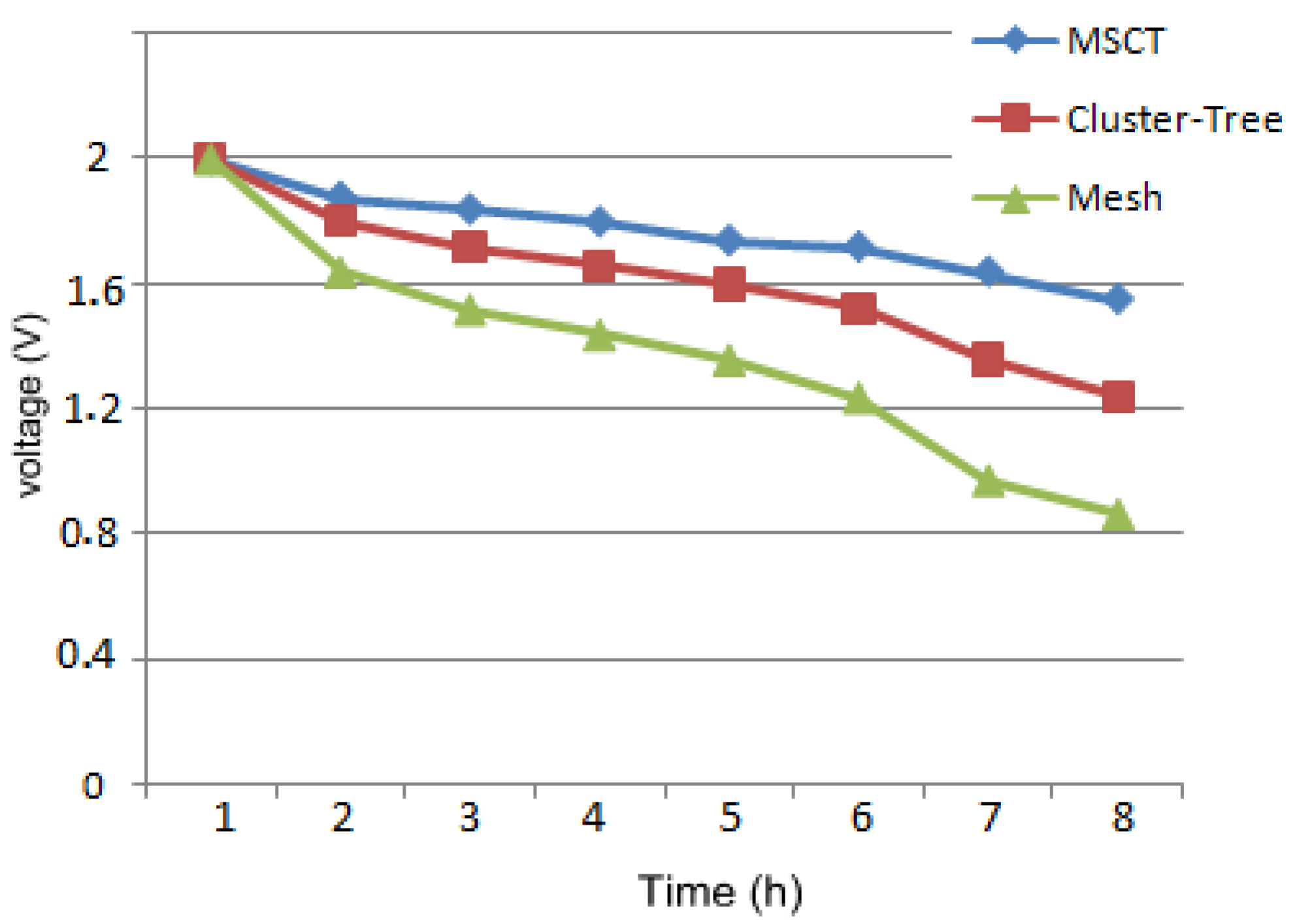
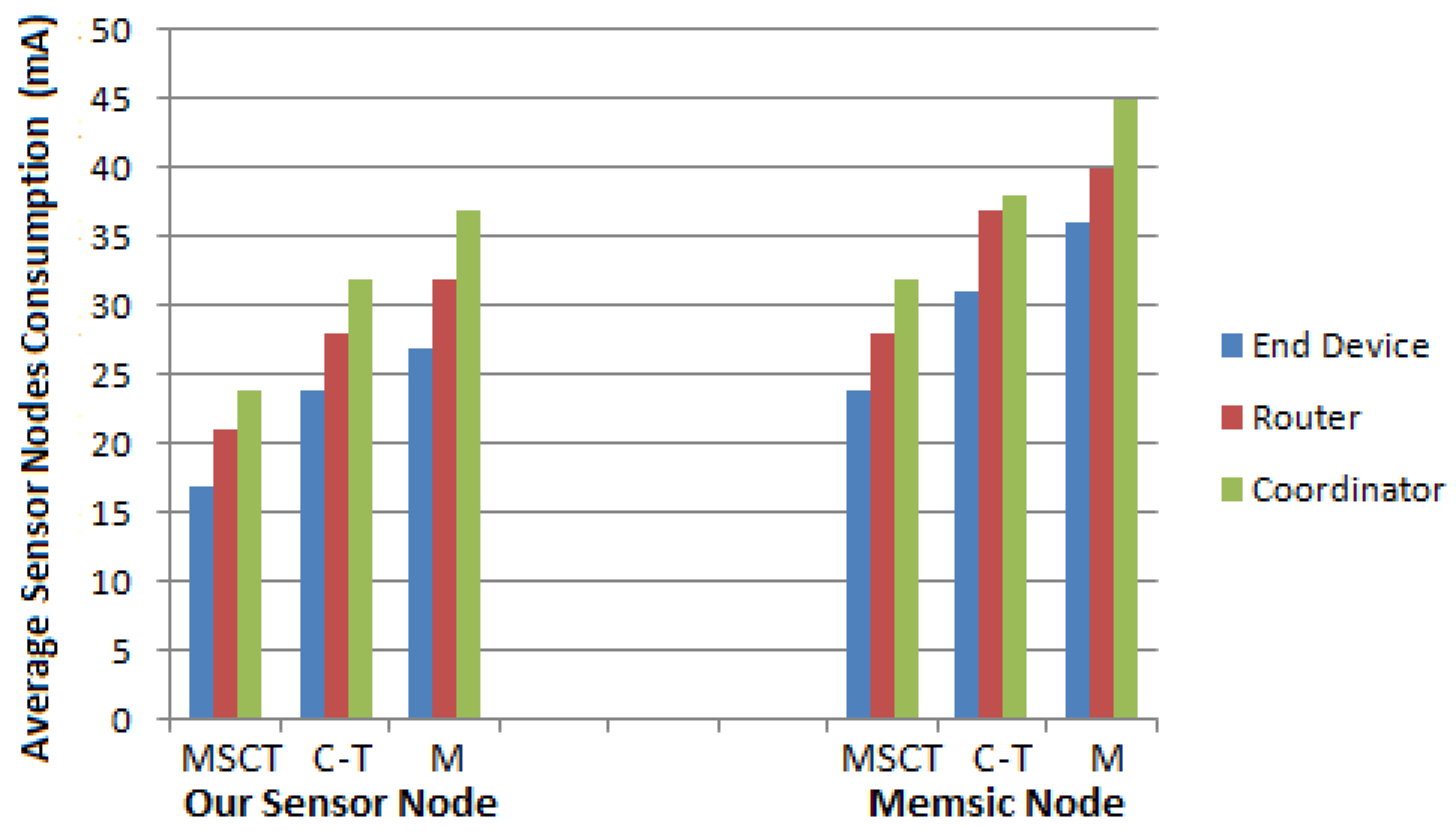
5.2. Results and Discussion
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Ulema, M. Wireless sensor networks: Architectures, protocols, and management. In Proceedings of the Network Operations and Management Symposium, Seoul, Korea, 19–23 April 2004. [Google Scholar]
- Bargh, M.S.; De Groote, R. Indoor Localization Based on Response Rate of Bluetooth Inquiries. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments (MELT’08), San Francisco, CA, USA, 19 September 2008; pp. 49–54. [Google Scholar]
- Gomez, C.; Paradells, J. Wireless home automation networks: A survey of architectures and technologies. IEEE Commun. Mag. 2010, 48, 92–101. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Shuaib, K.; Alnuaimi, M.; Boulmalf, M.; Jawhar, I.; Sallabi, F.; Lakas, A. Performance Evaluation of IEEE 802.15.4: Experimental and Simulation Results. J. Commun. 2007, 2, 29–37. [Google Scholar] [CrossRef]
- Alnuaimi, M.; Shuaib, K.; Jawhar, I. Performance Evaluation of IEEE 802.15.4 Physical Layer Using MatLab/Simulink. In Proceedings of the Innovations in Information Technology, Dubai, UAE, 19–21 November 2006. [Google Scholar]
- Melodia, T.; Pompili, D.; Akyildiz, I.F. On the interdependence of distributed topology control and geographical routing in ad hoc and sensor networks. IEEE J. Sel. Areas Commun. 2005, 23, 520–532. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Vasilakos, A.V. A Survey on Topology Control in Wireless Sensor Networks: Taxonomy, Comparative Study, and Open Issues. Proc. IEEE 2013, 101, 2538–2557. [Google Scholar] [CrossRef]
- Microchip Technology Inc. MRF24J40 Data Sheet, IEEE 802.15.4, 2.4 GHz RF Transceiver ; Microchip Technology Inc.: Chandler, AZ, USA, 2010.
- Schubert, T.W.; D’Ausilio, A.; Canto, R. Using Arduino microcontroller boards to measure response latencies. Behav. Res. Methods 2013, 45, 1332–1346. [Google Scholar] [CrossRef] [PubMed]
- Ovalle-Martínez, F.J.; Stojmenović, I.; García-Nocetti, F.; Solano-González, J. Finding minimum transmission radii for preserving connectivity and constructing minimal spanning trees in ad hoc and sensor networks. J. Parallel Distrub. Comput. 2005, 65, 132–141. [Google Scholar]
- Sahbani, H.; El Marraki, M. Ennumeration of the Number of Spanning Trees in the Lantern Maximal Planar Graph. Appl. Math. Sci. 2014, 8, 3661–3666. [Google Scholar] [CrossRef]
- Khuller, S.; Raghavachari, B.; Young, N. Balancing minimum spanning trees and shortest-path trees. Algorithmica 1995, 14, 305–321. [Google Scholar] [CrossRef]
- Gallager, R.G.; Humblet, P.A.; Spira, P.M. A distributed algorithm for minimum-weight spanning trees. ACM Trans. Program. Lang. Syst. 1983, 5, 66–77. [Google Scholar] [CrossRef]
- Gabow, H.N.; Galil, Z.; Spencer, T.; Tarjan, R.E. Efficient algorithms for finding minimum spanning trees in undirected and directed graphs. Combinatorica 1986, 6, 109–122. [Google Scholar] [CrossRef]
- Kruskal, J.B. On the shortest spanning subtree of a graph and the traveling salesman problem. Proc. Am. Math. Soc. 1956, 7, 48–50. [Google Scholar] [CrossRef]
- Howitt, I.; Gutierrez, J. IEEE 802.15.4 low rate-wireless personal area network coexistence issues. In Proceedings of the 2003 IEEE Wireless Communications and Networking (WCNC 2003), New Orleans, LA, USA, 16–20 March 2003; Volume 3, pp. 1481–1486. [Google Scholar]
- Baronti, P.; Pillai, P.; Chook, V.W.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15.4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Wang, C.; Sohraby, K.; Li, B.; Daneshmand, M.; Hu, Y. A survey of transport protocols for wireless sensor networks. IEEE Netw. 2006, 20, 34–40. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, X. A survey on wireless mesh networks. IEEE Commun. Mag. 2005, 43, S23–S30. [Google Scholar] [CrossRef]
- Huang, Y.K.; Pang, A.C.; Hsiu, P.C.; Zhuang, W.; Liu, P. Distributed throughput optimization for zigbee cluster-tree networks. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 513–520. [Google Scholar] [CrossRef]
- Koubaa, A.; Cunha, A.; Alves, M. A time division beacon scheduling mechanism for IEEE 802.15.4/ZigBee cluster-tree wireless sensor networks. In Proceedings of the 19th Euromicro Conference on Real-Time Systems (ECRTS’07), Pisa, Italy, 4–6 July 2007; pp. 125–135. [Google Scholar]
- Cuomo, F.; Della Luna, S.; Cipollone, E.; Todorova, P.; Suihko, T. Topology formation in IEEE 802.15.4: Cluster-tree characterization. In Proceedings of the Sixth Annual IEEE International Conference on Pervasive Computing and Communications (PerCom 2008), Hong Kong, China, 17–21 March 2008; pp. 276–281. [Google Scholar]
- Barrett, S.F.; Pack, D.J. Atmel avr microcontroller primer: Programming and interfacing. Synth. Lect. Digit. Circuits Syst. 2002, 7, 1–244. [Google Scholar] [CrossRef]
- Sadoudi, L.; Biaou, U.; Bocquet, M.; Rivenq, A. Modeling of ZigBee (IEEE 802.15.4) channel in rail environment for intelligent transport. In Proceedings of the 2015 4th IEEE International Conference on Advanced Logistics and Transport (IEEE ICALT 2015), Valenciennes, France, 20–22 May 2015. [Google Scholar]
- Seidel, S.Y.; Rappaport, T.S. 914 MHz path loss prediction models for indoor wireless communications in multifloored buildings. IEEE Trans. Antennas Propag. 1992, 40, 207–217. [Google Scholar] [CrossRef]
- Lott, M.; Forkel, I. A multi-wall-and-floor model for indoor radio propagation. In Proceedings of the VTC 2001 Spring IEEE VTS 53rd Vehicular Technology Conference, Rhodes, Greece, 6–9 May 2001; Volume 1, pp. 464–468. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Sensor Node | Micro Sensor Node | RF Module | Flash Memory | Program Memory | Frequency Range | Data Rate (kbps) |
|---|---|---|---|---|---|---|
| Texas | ARM | SmartRF05EB | 512 K | 8 K RAM | 868–870 MHz | 250 |
| Instruments Mote | Cortex-M3 | |||||
| Microchip | PIC24 | MRF24J40 | 128 K | 4 K RAM | 2.405–2.48 GHz | 250 |
| TelosB | Atmega128 | TI CC2420 | 48 K | 10 K RAM | 2.4 GHz | 250 |
| Memsic | ATmega128L | TI Chipcon | 128 K | 4 K RAM | 2.4 GHz | 250 |
| CC2420 | ||||||
| Tiny Node | TI MSP430 | Smart RF | 512 K | 8 K RAM | 2.4–2.4835 GHz | 152.3 |
| 125 MTD | ||||||
| Lotus | NXPLPC1758 | RF231 | 512 K | 64 K SRAM | 2.4 GHz | 250 |
| Atmel | ||||||
| Sun SPOT | ARM 920T | TI CC2420 | 512 K | 128 K + 4 K + 4 K | 2.4 GHz | 250 |
| Our Designed Node | Atmel | MRF24J40 | 512 K | 64 K RAM | 2.4 GHz | 250 |
| SAM3X8E ARM |
| Name of Sensor Nodes | Transmitter Power | Average Consumption | Average Indoor Range | Average Outdoor Range | Receive Sensitivity |
|---|---|---|---|---|---|
| Texas | −24 dBm–0 dBm | 24–30 mA | 108 ft | 173 ft | −90 dBm (min), |
| Instruments Mote | −94 dBm | ||||
| Microchip | −24 dBm–0 dBm | 19–27 mA | 110 ft | 183 ft | −94 dBm |
| TelosB | −28 dBm–0 dBm | 27–36 mA | 82 ft | 102 ft | −90 dBm (min), |
| −94 dBm | |||||
| Memsic | −26 dBm–0 dBm | 25–37 mA | 89 ft | 103 ft | −90 dBm (min), |
| −94 dBm | |||||
| Tiny Node | max 12 dBm | 43–62 mA | 121 ft | 210 ft | −106 dBm |
| Lotus | 3 dBm | 34–52 mA | 51 ft | 82 ft | −101 dBm |
| Sun SPOT | −24 dBm–0 dBm | 23–46 mA | 112 ft | 169 ft | −90 dBm (min) |
| Our Designed Node | −24 dBm–0 dBm | 17–25 mA | 117 ft | 153 ft | −90 dBm (min), |
| −92 dBm |
| Experiment Parameters | Values |
|---|---|
| Deployment distribution | Unique |
| Deployment area | 200 m × 40 m |
| Number of FFDs | 13 |
| Number of RFDs | 0 |
| Number of nodes | 13 |
| Initial energy | 1 (J) |
| Number of coordinators | 1 |
| Maximum indoor distance between adjacent nodes | 24 m |
| Sensing interval | 2 s |
| Packets size | 127 bits |
| Time | 2 min |
| Time | 4 min |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouadou, M.; Zytoune, O.; El Hillali, Y.; Menhaj-Rivenq, A.; Aboutajdine, D. Energy Efficient Hardware and Improved Cluster-Tree Topology for Lifetime Prolongation in ZigBee Sensor Networks. J. Sens. Actuator Netw. 2017, 6, 22. https://doi.org/10.3390/jsan6040022
Ouadou M, Zytoune O, El Hillali Y, Menhaj-Rivenq A, Aboutajdine D. Energy Efficient Hardware and Improved Cluster-Tree Topology for Lifetime Prolongation in ZigBee Sensor Networks. Journal of Sensor and Actuator Networks. 2017; 6(4):22. https://doi.org/10.3390/jsan6040022
Chicago/Turabian StyleOuadou, Mourad, Ouadoudi Zytoune, Yassin El Hillali, Atika Menhaj-Rivenq, and Driss Aboutajdine. 2017. "Energy Efficient Hardware and Improved Cluster-Tree Topology for Lifetime Prolongation in ZigBee Sensor Networks" Journal of Sensor and Actuator Networks 6, no. 4: 22. https://doi.org/10.3390/jsan6040022
APA StyleOuadou, M., Zytoune, O., El Hillali, Y., Menhaj-Rivenq, A., & Aboutajdine, D. (2017). Energy Efficient Hardware and Improved Cluster-Tree Topology for Lifetime Prolongation in ZigBee Sensor Networks. Journal of Sensor and Actuator Networks, 6(4), 22. https://doi.org/10.3390/jsan6040022