Abstract
Unmanned aerial vehicles (UAVs) play a crucial role in enhancing search and rescue (SAR) operations by accessing inaccessible areas, accomplishing challenging tasks, and providing real-time monitoring and modeling in situations where human presence is unsafe. Multi-UAVs can collaborate more efficiently and cost-effectively than a single large UAV for performing SAR operations. In multi-UAV systems, task allocation (TA) is a critical and complex process involving cooperative decision making and control to minimize the time and energy consumption of UAVs for task completion. This paper offers an exhaustive review of both static and dynamic TA algorithms, confidently assessing their strengths, weaknesses, and limitations. It provides valuable insights into addressing research questions related to specific UAV operations in SAR. The paper rigorously discusses outstanding issues and challenges and confidently presents potential directions for the future development of task assignment algorithms. Finally, it confidently highlights the challenges of multi-UAV dynamic TA methods for SAR. This work is crucial for gaining a comprehensive understanding of multi-UAV dynamic TA algorithms and confidently emphasizes critical open issues and research gaps for future SAR research and development, ensuring that readers feel informed and knowledgeable.
1. Introduction
In urban areas, unexpected catastrophic events such as floods, fires, and earthquakes can cause widespread damage and affect a large population [1]. The primary objective of search and rescue (SAR) operations is to locate and assist those in need swiftly. This often involves critical tasks such as sharing information and delivering supplies within a limited timeframe. Unmanned aerial vehicles (UAVs) have transformed the efficiency of SAR operations, significantly boosting their efficiency and impact, particularly in these challenging environments. The notable success of UAVs in various disaster relief operations has firmly demonstrated their unmatched capability to perform tasks once considered unfeasible for humans [2,3,4]. UAVs can be rapidly deployed, demonstrate exceptional maneuverability, provide cost-effective solutions for various applications, show self-organizing capabilities, and have high mobility and scalability [5,6,7].
Employing a single UAV with multiple functions can lead to increased costs and limitations in terms of time efficiency, simultaneous actions, fault tolerance, and flexibility [8,9]. Single UAVs may face challenges in meeting system objectives. Depending solely on a single UAV setup can restrict coverage area and result in a heavy dependence on communication with only one point. This approach can lead to decreased energy efficiency and heightened computational overhead, as the UAV must autonomously manage all tasks. On the other hand, using multiple UAVs to form multi-agent systems can effectively address these limitations and maximize the advantages of collaborative effort [10]. Multi-UAV systems can distribute the computational workload, enhancing energy efficiency and eliminating reliance on a single source. Figure 1 illustrates the differences, highlighting the limited communication and energy challenges in single-UAV setups compared to the enhanced capabilities of multi-UAV systems.
Figure 1.
A Comparison of single UAV and multi-UAV systems performing SAR operations.
Multi-UAV systems are highly beneficial for SAR operations due to their numerous advantages. The UAVs have the capability to collaborate or act autonomously, whether they are dedicated to a shared mission or pursuing their individual objectives [11]. These UAVs engage in interaction and cooperation to effectively address constraints and achieve their goals. Multi-UAV systems offer a wide range of benefits, making them highly desirable in various potential application domains. These systems can be effectively used in situations or environments [12,13,14,15,16] where:
- There is a risk to human lives;
- Immediate response is crucial;
- Cost-effective solutions are needed;
- Minimal human involvement is preferred.
The authors in [17] presented three domain-independent axes of multi-UAV coordination based on the main characteristics of UAVs, tasks, and time:
- Single-Task (ST) vs. Multi-Task (MT) UAVs: The first axis, where ST indicates that each UAV can execute one task at a time, and MT indicates that UAVs can execute multiple tasks simultaneously.
- Single-UAV (SU) vs. Multi-UAV (MU) tasks: The second axis represents whether each task requires only a single UAV (SU) to execute it or if some tasks may require multiple UAVs (MU).
- Instantaneous Assignment (IA) vs. Time-extended Assignment (TA): The third axis shows that IA means tasks must be allocated upon their arrival instantaneously, and TA means available tasks need to be assigned in their turn.
Multi-UAV systems enable the exploration of various environmental aspects and the coordination among UAVs [18]. Using a swarm of UAVs in scenarios such as underwater or land mine clearance [19], toxic spill cleanup [20], and military applications [21] is not just cost-effective but also minimizes risk to human lives. The cost-effectiveness is attributed to the low cost of UAVs in a swarm and reduced energy requirements compared to a single multi-functional UAV. Harbor or area surveillance demands consistent monitoring in all weather conditions [22]. In such scenarios, a UAV swarm proves to be a highly efficient solution. This approach enables the efficient performance of monitoring tasks aimed at securing critical assets and infrastructure. Moreover, the application of multi-UAVs extends beyond the outlined scenarios to encompass various other situations. The symbols and notations utilized in this paper are listed in Table 1.

Table 1.
List of acronyms.
1.1. Challenges in Multi-UAVs
It is essential to ensure maximum cooperation among multi-UAVs for task assignment algorithms. These algorithms should facilitate information sharing, task allocation (TA), and responsibility delegation with proper timing and organization. Task assignment can be viewed as a graph theory problem and can be addressed using deterministic search algorithms. However, traditional deterministic algorithms are limited by computational complexity and may only handle small and simple tasks. Although heuristic tasks can be solved, achieving optimal efficiency may be challenging. Effective communication and information exchange among multi-UAVs can enhance their ability to identify performance requirements for timely and reliable task execution. The coordination of UAVs involves complex collaborative efforts and presents notable implementation challenges. An optimization algorithm that incorporates task prioritization, synchronization, flight trajectories, and real-world constraints is extremely valuable for addressing these challenges [6].
Detecting faulty UAVs during task execution is essential for enhancing the effectiveness of a multi-UAV system. This allows for efficient reassignment of tasks that were initially allocated to a malfunctioning UAV, ensuring that the overall system remains functional [23]. UAVs may encounter difficulties while completing a task due to variations in task duration and deadline. Due to battery limitations, energy plays a crucial role in the SAR operation of UAVs. Improving power consumption is essential for enhancing SAR missions. Various factors, such as maximum speed, operating altitude, equipped devices, and payload, influence a UAV’s energy consumption. Given these challenges, it is imperative to develop an algorithm that optimizes TA to maximize the energy efficiency of the multi-UAV system [24]. The collaboration of multi-UAVs with their diverse capabilities can significantly boost mission performance across varied environments and task requirements.
1.2. Motivation and Contributions
The increasing frequency of disaster events has sparked a keen interest in disaster management within the research community [25,26]. Recent technological advancements have the potential to enhance SAR operations significantly. The implementation of UAV communication faces numerous challenges due to the issues present in various components of UAV networks, as discussed in the previous section. However, these challenges serve as motivation for numerous researchers to concentrate their efforts on addressing unresolved issues. Studies have demonstrated that employing multi-UAV systems can markedly improve support services in disaster-affected areas due to their efficiency, simultaneous operation capabilities, flexibility, and fault tolerance. Disaster environments are known for their high unpredictability and dynamism. Unexpected tasks may arise, UAV malfunctions can occur, and additional UAVs may need to be integrated into the system. Efficient TA is imperative for successful SAR activities during a disaster event [27]. This requirement for improvement is the cornerstone of the research presented in this paper.
The paper presents a thorough and systematic overview of static and dynamic TA schemes for multi-UAV in disaster scenarios, addressing the coordination of multiple UAVs to assist individuals affected by the disaster. It starts by introducing the fundamental concept and trigger scenario, followed by an analysis of the research status and the pros and cons of each allocation scheme. The existing TA algorithms are assessed based on their attributes, advantages, limitations, and possible advancements. Lastly, it highlights the crucial unresolved issues and research challenges related to multi-UAV dynamic TA methods and lays out future research directions.
1.3. Organization of the Article
The paper follows a well-structured approach, starting with a problem statement in Section 2 that outlines the parameters, constraints, and considerations within the domain of multi-UAV TA. Section 3 presents a comprehensive analysis of different TA strategies emphasizing the intricacies of various methodologies used to tackle this complex issue. In Section 4, the paper identifies research gaps in the reviewed TA algorithms and discusses potential avenues for enhancement and improvement, charting a path for future advancements. Finally, Section 5 offers a summary of the main findings and insights derived from the preceding sections, along with potential pathways and opportunities for additional exploration and research. The organizational structure of the research article is illustrated in Figure 2.
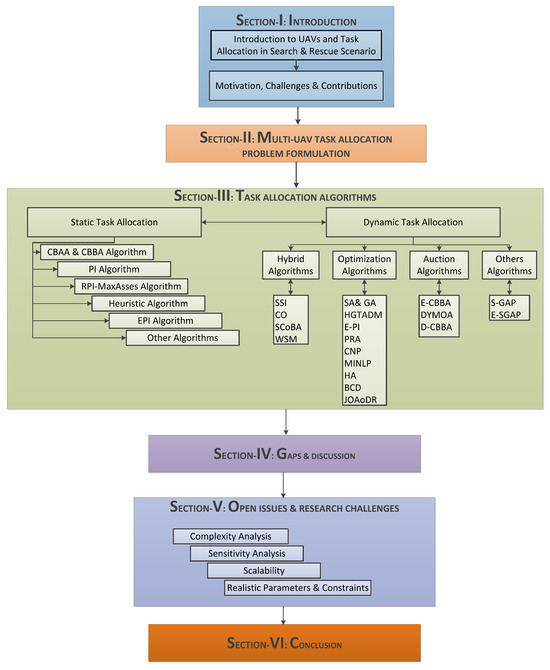
Figure 2.
Organization structure of the research article.
2. Multi-UAV Task Allocation in SAR
A multi-UAV system consists of multiple UAVs operating simultaneously and cooperating to accomplish tasks. Multiple constraints and configurations can enable multiple UAVs to perform tasks. A generic SAR scenario is described to provide an overview of the TA problem.
2.1. Problem Formulation
Consider there are N UAVs which are working together to support M number of survivors in an SAR operation, as shown in Figure 3. Here, the tasks are regarded as survivors, respectively. In SAR scenarios, UAVs must initiate support services for survivors within their designated time limits or deadlines. Tasks that any UAV fails to complete before their respective deadlines are considered unsuccessful. Let be the set of deadlines corresponding to N UAVs, respectively. In an SAR scenario, a UAV can only perform a single task at a time, and each task must be assigned to a unique UAV immediately.
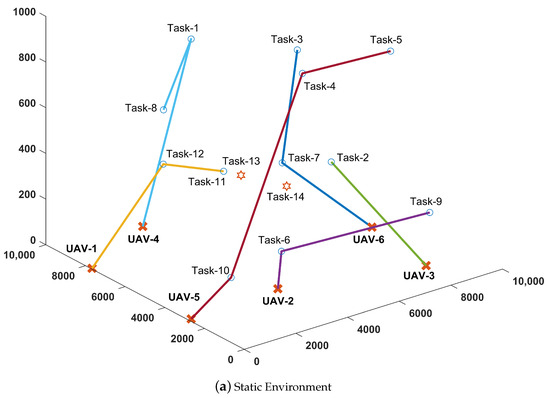
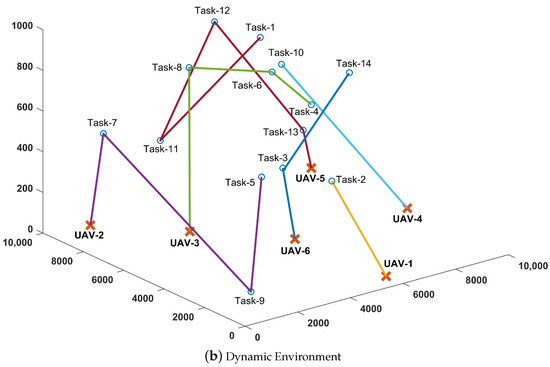
Figure 3.
Multi-UAV task allocation: static vs. dynamic environments: (a) 12 tasks are assigned to 6 UAVs, where 2 tasks ( and ) arrived after task allocation and during the task execution phase; (b) UAVs are reallocating tasks to accommodate new tasks and , assigning them to UAV1 and UAV3.
This TA method involves assigning a single task to a single UAV in an instantaneous manner (ST-SUAV-IA) [28]. For homogeneous UAVs, each UAV is capable of performing any task. For cases involving different types of UAVs, a matrix H is defined, which represents the compatibility of each UAV with a specific task through the entry , indicating the UAV’s ability to perform that task. The compatibility matrix H has dimensions N*M, where M represents the number of tasks and N represents the number of UAVs.
In a multi-UAV system, if the UAVs are all the same, then all the entries in the matrix H are 1, indicating that each UAV can perform every task. However, in a heterogeneous multi-UAV system, a 1 entry in the H matrix means the corresponding UAV can perform the task, while a 0 indicates it cannot. Each UAV is limited to performing a maximum of L tasks due to carrying capacity. The UAVs work together to distribute tasks based on specific rules in order to provide support services to survivors. Each UAV can be assigned a maximum of L tasks, and each task can only be assigned to one UAV at a time.
UAVs perform tasks in a specific sequence to ensure that each task is completed before its deadline while minimizing the time cost , where represents the time cost for the UAV to complete task . Each UAV can be assigned multiple tasks, which are listed as .
The cost of a task is calculated based on the travel time of a UAV from its current location to the task location and the time needed to complete the task (). While the duration for different tasks may vary, we are assuming it to be constant for simplicity. In this situation, the objective is to efficiently allocate tasks to ensure that the highest possible number of survivors receive support services while considering the conditions above. The goal is to assign tasks to UAVs to maximize task priority while adhering to the constraints outlined in Equation (1):
The maximum task capacity of a UAV is represented by , while represents a task at position k in the task list of a UAV . defines the compatibility of a task with a UAV when UAVs are heterogeneous. represents a battery time constraint, while denotes a task that can only be assigned to one UAV. The notations used in the paper are listed in Table 2.
Table 2.
Notations used in the paper.
2.2. Task Allocation in a Multi-UAV Scenario
Figure 3 illustrates the allocation of 14 tasks to six UAVs in a 3D area (10 km × 10 km × 1 km), with the UAVs being randomly positioned. In an SAR scenario, UAVs are instrumental in providing essential support services to survivors within the necessary time frame. The UAV task list begins empty, but they will work together in a distributed manner, showcasing their efficient strategy, to effectively complete these tasks.
In this dynamic SAR situation, task statuses are subject to change. For instance, a UAV might encounter a malfunction, the duration of a task might change during its execution, a task may expire and need to be deleted, or a new task may emerge. UAVs initiate a task reassignment phase to accommodate new tasks by reallocating previously assigned tasks using a task reassignment mechanism. This process allows for the creation of space for unallocated dynamic tasks.
3. Task Allocation Algorithms
The TA is the strategic assignment of a set of tasks to a multi-UAV system aiming to optimize overall system performance while adhering to specified constraints. There are two types of UAV swarm environments: static and dynamic [29]. In static environments, all tasks are predetermined, and no new tasks can be added during the allocation process. On the other hand, dynamic environments are characterized by constant changes due to real-time events, leading to the possibility of new tasks being introduced during task execution. As a result, this may necessitate the reassignment of tasks to other UAVs [30].
The work in [31] presented a thorough examination of various TA methods, encompassing their metrics, characteristics, and application domains. Furthermore, the authors methodically categorized different TA algorithms based on their efficiency, scalability, and computational cost. The paper delved into a detailed comparison of game-theory-based methods, learning-based methods, optimization-based methods, hybrid approaches, and auction-based approaches. The selection of an algorithm hinges on the specific application area and its characteristics, as each method may exhibit varying degrees of efficiency depending on the domain. The literature extensively covers both static and dynamic TA, with numerous proposed algorithms aimed at addressing this challenge.
In SAR operations, Static Task Allocation (STA) and Dynamic Task Allocation (DTA) represent two distinct approaches to managing UAVs. STA involves a centralized planning process where tasks are predetermined before the mission begins, based on pre-defined scenarios, historical data, and static environmental models. This method operates with a rigid structure, providing limited flexibility to adapt to unforeseen changes such as new target discoveries or obstacles. It is computationally efficient due to its reliance on offline planning and is best suited for highly structured environments with predictable conditions. Key parameters in STA include task priorities, UAV capabilities, communication range, terrain data, and initial target locations. However, STA needs to work on handling unexpected changes or new information during the mission, making it less suitable for dynamic environments.
In contrast, DTA offers a more flexible and adaptive approach, enabling UAVs to make real-time decisions based on sensory data and ongoing communication with other UAVs. This approach allows for tasks to be modified or added during the mission, making it ideal for handling the uncertainty and evolving nature of SAR operations. DTA’s adaptability to changing conditions, new target discoveries, and UAV failures comes at the cost of higher computational requirements, as it necessitates real-time decision making and information processing. Key parameters include real-time sensor data, communication network topology, UAV battery levels, target dynamics, and environmental factors such as weather. While DTA can handle the dynamic and uncertain nature of SAR operations more effectively, it requires reliable communication and sufficient computational resources. Hybrid approaches, combining elements of both STA and DTA, are increasingly being adopted to balance pre-planning and real-time adaptability, ensuring a more robust response to varying SAR mission requirements. The main differences between STA and DTA, considering their key features, are outlined in Table 3.
Table 3.
Difference between static and dynamic task allocation.
3.1. Static Task Allocation
Table 4 compares the TA algorithms for a static environment based on the application area, deadline, fuel battery, task selection, task quality priority, task duration, task location, velocity speed, new task, new UAV, and task deletion in the study.
Table 4.
A comprehensive review of static task allocation schemes.
3.1.1. CBAA and CBBA Algorithm
The authors of [43] introduced the consensus-based auction algorithm (CBAA) and the consensus-based bundle algorithm (CBBA), with the CBBA algorithm capturing significant attention in the research community. These decentralized TA algorithms effectively coordinate autonomous vehicle fleets using an auction-based decision approach for decentralized task selection. They also employ a consensus procedure based on local communication as a conflict resolution method to achieve agreement.
The CBAA algorithm employs a single-assignment-based strategy for both auction and consensus processes. In the algorithm’s two-phase approach, the auction process precedes the consensus process. The algorithm is also extended to address a multi-assignment problem, resulting in the CBBA algorithm. In CBBA, each vehicle is assigned a bundle of tasks, and during the auction, consensus is reached at the task level rather than the bundle level. The CBBA algorithm also encompasses two key phases: bundle construction and conflict resolution.
The CBBA algorithm is extended in [37] by incorporating an ant colony algorithm to minimize spans and traveled distances in a fully connected undirected graph. The authors employed an ant colony algorithm in the initial phase of the CBBA algorithm to enable UAVs to choose the survivors to rescue. Using the ant colony algorithm, each UAV selected a bundle of survivors based on the shortest path to serve them efficiently. In the subsequent phase, each UAV communicated its task bundles to neighboring UAVs to effectively address conflicts in survivor assignments.
The CBBA algorithm is a cutting-edge decentralized TA method designed for homogeneous UAVs and independent tasks. In a landmark extension of the CBBA algorithm, the authors in [36] introduced the CBBA-TCC algorithm to tackle task coupling constraints and heterogeneous multi-UAV systems. This modification considers both search tasks and rescue tasks, with a formulated coupling constraint to ensure both tasks are completed for a target. The CBBA algorithm consists of inner and outer consensus stages, both of which have been expertly tailored for the CBBA-TCC variant. Each UAV now initializes a can-do list detailing all tasks it can undertake without violating task precedence constraints. After reaching the inner consensus, a task’s insert-position feasibility index is determined if it satisfies coupling constraints. With these modifications, the CBBA-TCC algorithm is now capable of reaching global consensus and achieving a conflict-free allocation.
Both the CBAA and CBBA algorithms utilize greedy costing mechanisms, wherein each vehicle prioritizes reducing its task costs. The work in [42] demonstrated through simulations that the CBBA algorithm assigns fewer tasks compared to their proposed performance impact (PI) algorithm.
3.1.2. PI Algorithm
The PI algorithm represents a heuristic distributed TA method for a multi-UAV system, presenting an enhanced iteration of the CBBA algorithm. The key distinction between the CBBA and PI algorithms resides in their costing mechanism. The PI algorithm notably incorporates the concept of task significance, calculated as the contribution of local cost generated by a vehicle.
The PI algorithm aims to minimize the total path cost for all vehicles. It operates through a task inclusion phase, which adds tasks to the list, and a consensus and task removal phase, which reaches a consensus for each task and removes tasks assigned to other vehicles. The algorithm is rooted in optimization principles and focuses on reducing overall task costs. Compared to the CBBA algorithm, the PI algorithm assigns more tasks while achieving lower average task costs.
3.1.3. RPI-MaxAsses Algorithm
The issue of local minima in the PI algorithm is effectively addressed, emphasizing the significance of task assignment in specific scenarios [39]. To counter the local minima problem, the authors enhanced the PI algorithm to maximize the allocation of tasks in a distributed multi-UAV system under stringent time constraints, presenting the RPI-MaxAsses algorithm. Their approach involved incorporating a task reassignment phase after initial TA using the PI algorithm, which effectively created a viable time space for unallocated tasks.
The frequent reassignment of tasks increases the task load. Introducing the swap distance concept prevents endless task swapping among UAVs. The proposed algorithm was tested on four network topologies—star, mesh, circular, and row. When designing a multi-UAV system, it is essential to consider the battery constraint. Unlike the baseline PI algorithm, the authors in [39] accounted for battery limitation to demonstrate the effectiveness of their proposed algorithm.
3.1.4. Heuristic Approaches
The work in [41] investigated TA for a multi-agent system in time-constrained scenarios. The authors enhance the PI algorithm by incorporating softmax and ɛ-greedy task selection methods. This integration not only amplifies the exploratory characteristics of the PI algorithm but also results in a higher number of allocated tasks. The exploratory nature of the ɛ-greedy task selection method bears many similarities to a genetic algorithm (GA), employing random cross-over and mutation to introduce variation in the solution. These variations enable the exploration of new regions within the search space, ultimately enhancing solution fitness.
In solving the TA problem for the SAR domain, particle swarm optimization (PSO) stands out as an effective optimization method. In order to apply PSO to task allocation in SAR, it is essential to formulate the problem as an optimization problem [45]. This necessitates establishing the objective function, which may involve minimizing task completion time, maximizing the number of rescued individuals, or optimizing energy utilization. It is also important to take into account constraints associated with UAV capabilities, communication range, and task interdependencies. The modified centralized PSO (MCPSO) algorithm [38] is tailored to the challenges of SAR, making it potentially more effective in this domain. MCPSO and PSO are both optimization algorithms used to handle the complex problem of task allocation in UAV SAR operations. MCPSO is a specialized variant of PSO designed specifically for centralized control, giving it access to complete mission data. This centralized perspective allows MCPSO to excel in generating optimal task assignments, as demonstrated by its superior performance in time cost compared to other methods. In contrast, PSO operates on a more general framework, requiring adaptation for specific applications like SAR. While versatile, PSO might not match the specialized efficiency of MCPSO in this domain.
The MCPSO algorithm, being a centralized TA algorithm, has been proven to outperform distributed algorithms, as given in [46,47]. The MCPSO algorithm incorporates a priority sequence of tasks based on task deadlines, an insert operation, and a local search method into the PSO algorithm. The time cost between rescue locations and vehicles determines these task priorities. By utilizing the insert operation, tasks can be efficiently assigned to vehicles with few or no tasks, leading to a reduction in the overall mission cost. Furthermore, the authors introduced new methods for updating the best local and global solutions within the MCPSO framework. To determine the success of MCPSO, the authors conducted a comparison of CBBA, PI, and PI with softmax algorithms.
The Ant Colony Optimization (ACO) technique is inspired by the foraging behavior of ants and is used to optimize UAV task allocation in SAR operations [48]. In this method, a colony of artificial ants simulates potential solutions to the task assignment problem. Ants select tasks based on pheromone levels, which indicate the desirability of task sequences. As ants explore potential solutions, they deposit pheromones on promising paths, guiding subsequent ants toward better solutions. ACO effectively optimizes task allocation by considering factors such as task priorities, UAV capabilities, and environmental constraints, ultimately enhancing the efficiency and effectiveness of search and rescue operations.
The work in [39] thoroughly examined the allocation of tasks to a multi-vehicle system utilizing the task swap allocation (TSA) algorithm. The TSA algorithm serves as an enhancement of the significance method (SM) algorithm, specifically aimed at iteratively enhancing the total number of allocated tasks following the computation of the original solution. In contrast, while the SM algorithm focuses on optimizing waiting time, it does not effectively maximize the total number of allocated tasks. The task swap Allocation (TSA) algorithm, however, effectively reallocates tasks among the vehicles to establish feasible time slots for unallocated tasks. As a result, it facilitates the allocation of more tasks within the allowable resources and task deadlines.
The authors in [42] introduced a multi-objective ant colony system (MOACS) method designed to address the cooperative TA problem for multi-UAV systems. They have conceptualized the TA problem as a multi-objective traveling salesperson problem. The MOACS method focuses on minimizing the total and maximum cost of UAV vehicles to achieve workload balance. Additionally, they have proposed a global pheromone update rule to prevent rapid convergence and local optima.
The TA challenge for a UAV swarm saturation attack against hostile surface ships, which involved a fleet of diverse UAVs, is presented in [32]. The authors used a deep reinforcement learning approach to solve the TA within the UAV swarm for a saturation attack. The problem was formulated as a Markov decision process, and a policy neural network was developed using the attention mechanism. They introduced a training algorithm based on the policy gradient method to facilitate agents in learning an efficient task assignment policy from simulated data. Their approach operated under the assumption of fixed target locations relative to the UAV speeds. The UAV speeds were considered constant, with each UAV possessing its maximum flight range. Furthermore, each hostile surface ship is slated for destruction before its specific deadline.
3.1.5. Extended-PI Algorithm
The PI algorithm assigns tasks to UAVs based on the minimum sum of task costs without giving preference to any task. The authors [35] have addressed the maximization of critical task assignments by introducing the extended PI algorithm with critical tasks (EPIAC). They have enhanced the task inclusion criteria and conflict resolution method of the PI algorithm to maximize the total assigned score. Additionally, they have incorporated a task list resizing phase in the PI algorithm to maximize the assignment of critical tasks.
The work in [34] effectively introduced task rescheduling capability to address local minima issues in the PI algorithm. The authors also identified a deadlock issue in the task-exchange-based strategy of the PI-MaxAsses algorithm. As a solution, they proposed a new distributed task rescheduling process for multi-UAV, which integrates the local task reordering strategy known as PI-Reorder with an improved task exchange strategy. PI-Reorder facilitates the rearrangement of tasks in the task list, allowing the addition of unassigned tasks or new tasks without relying solely on task exchange. Moreover, to prevent an infinite cycle of task exchange between UAVs, the authors employed task counters to detect and isolate deadlocks.
3.1.6. Other Approaches
The work in [40] analyzed multi-UAV task assignment problems in a scenario where UAVs, distributed in a time-invariant drift field, need to visit multiple targets while minimizing average travel cost. The authors devised a path planning algorithm to determine a cost matrix for target assignment and utilized a set of navigation rules to minimize travel time between task locations. Once tasks are assigned, routes for navigation are generated, and targets are assigned to vehicles using clustering techniques such as Voronoi, extended Voronoi, and marginal cost-based clustering. This approach results in the generation of a target visiting matrix.
3.2. Dynamic Task Allocation (DTA)
In multi-UAV systems operating in dynamic environments, dynamic TA is a crucial necessity. The comparison presented in Table 5 evaluates TA algorithms for dynamic environments, considering factors such as application area, deadline, fuel battery, task selection, task quality priority, task duration, task location, velocity speed, new task, new UAV, and task deletion. The authors in [49] investigated the multi-UAV TA problem within the SAR domain. The objective was to have a multi-UAV network collaboratively search for targets in a designated environment and retrieve them at a specified location. The authors explored two distinct methods for allocating tasks to UAVs—an auction-inspired approach and a prediction-based approach. Under the auction-based method, TA and execution processes are conducted simultaneously. At the same time, in the prediction approach, UAVs select tasks to perform when they are not currently engaged in any task. This dynamic TA enhances system performance by adapting UAV behavior to environmental changes and the actions of other UAVs.
Table 5.
A comprehensive review of dynamic task allocation schemes.
3.2.1. Hybrid Approaches
The winner determination mechanism employs standard sequential single-item (SSI) auctions as detailed in [65], which offer a favorable balance between solution quality and complexity. These auctions are extended and utilized to allocate tasks to UAVs. Additionally, through a prediction-based approach, UAVs coordinate their activities via team reasoning, resulting in TA consensuses.
In [59], a robust framework is presented for solving multi-UAV cooperative task assignment problems using a combinatorial optimization model. The framework features a graph-based method to handle deadlock detection and resolution in task assignments. In order to tackle the issue of longer computation time when dealing with a larger number of UAVs or tasks, a new and improved modified two-part wolf pack search (MTWPS) algorithm has been introduced to enhance the efficiency of task assignment. Additionally, an easy-computing objective function-based framework is introduced to streamline the computational process further. To effectively consider parameters in TA for multi-UAV systems, a combination of the classical interior point method and the MTWPS algorithm is employed. To tackle time-sensitive uncertainties, an online hierarchical planning algorithm comprising a small-scale centralized planning algorithm and an exchange-bidding algorithm is proposed.
The multi-UAV TA problem involves the collaborative exploration and destruction of targets by multi-UAVs in a given environment [56]. It is assumed that the UAVs possess prior knowledge of suspicious locations to explore but need more information about the distribution of targets. As a result, destruction tasks are dynamically generated during the execution of exploration tasks. In addition, the uncertain anti-strike ability of tasks is taken into account, meaning a UAV may sustain damage during a destruction task if its strike ability is inferior to the target’s. Various approaches, including auction-based, vacancy chain, and deep Q-learning methods based on strategy-level selection, have been utilized to address the TA for exploration and destruction missions.
The challenge of dynamically allocating tasks to a multi-agent system within specified time windows and dealing with uncertainties in task completion is discussed in [63]. The aim is to minimize the number of unsuccessful tasks. The proposed stochastic conflict-based allocation (SCoBA) algorithm tackles sequential decision making under uncertainty and multi-agent coordination separately in a hierarchical manner for multi-UAV TA. It employs dynamic programming to calculate policies for individual agents at a lower layer while addressing conflicts in individual plans at the upper layer to achieve a valid multi-agent allocation.
The authors in [52] effectively tackled the complex task of solving multi-UAV dynamic task scheduling problems, taking into account task demands and platform capabilities. Their approach involved dynamic TA for multiple UAVs, with the goal of maximizing total task profit, minimizing time consumption, and balancing the number of scheduled tasks. To address this multi-objective problem, they employed the weighted sum method to convert it into a single-objective optimization. Additionally, they implemented a hybrid contract net protocol, incorporating buy-sell, swap, and replacement contracts to address the dynamic scheduling of tasks efficiently.
3.2.2. Optimization-Based DTA
Optimization approaches systematically identify the best solutions with one or multiple parameters while adhering to specific constraints to minimize or maximize the objectives. Exact optimization methods such as linear and quadratic programming guarantee the computation of an optimal solution. On the other hand, heuristic methods, such as simulated annealing and GA, yield suboptimal results [66]. Hybrid algorithms, which combine two or more algorithms, capitalize on the strengths and mitigate the weaknesses of each algorithm [43].
In [60], the TA problem for a swarm of multiple agents is effectively addressed using a hedonic game theoretical autonomous decision-making framework. The proposed algorithm employs a self-organizing approach, enabling agents to make decisions based on their individual preferences. This approach facilitates TA to agents based on location interactions with neighboring agents in a communication network. Moreover, the algorithm demonstrates the capability to allocate tasks to agents as new tasks arrive during the execution phase, as well as the reassignment of tasks in the event of agent loss.
The extended PI algorithm effectively addresses its two main issues: solution trapping in local minima and static structure [58]. In a dynamically changing environment where new tasks may arrive during task execution, TA algorithms must adapt to new data and re-compute solutions in real time. The introduction of task reassignment methodology as online task rescheduling in the PI algorithm enables the allocation of new tasks during task execution. Additionally, to mitigate the algorithm’s tendency to trap in local minima, an additional soft-max action selection procedure has been introduced to enhance its exploratory properties. As a result, the extended algorithm is capable of effectively handling dynamic events such as updated task locations, addition and removal of tasks, and UAV modifications.
The PI algorithm for distributed multi-UAV systems addresses the task reassignment problem, efficiently handling dynamic events that occur during task execution as originally proposed in [54]. The study considers five types of dynamic events for allocation during task execution: addition of new tasks, deletion of tasks, updated task location, updated task deadline, and updated task duration. Additionally, a distributed reassignment framework is proposed to handle these dynamic events efficiently. To reduce computational and communication load, the introduction of a partial reassignment algorithm (PRA) is accompanied by an incremental subteam formation mechanism and a partial releasing mechanism. An incremental subteam formation mechanism allows a part of the multi-UAV system to respond to dynamic events during task execution.
The work in [51] successfully addressed the distributed grouping cooperative dynamic task assignment problem for UAV swarms engaged in cooperative reconnaissance and attack missions. They accomplished this using the extended contract network protocol (CNP). The dynamic TA for the multi-UAV with distributed subsets topology involves careful consideration of multiple constraints, including task-performing sequence, cooperation, dynamic environment, payload model, communication topology, and UAV capability. The extended CNP algorithm proposed for dynamic task assignment is rooted in a robust determination mechanism of co-operators and a meticulous selection method of sequential tasks.
Deterministic methods are characterized by the absence of randomness and the ability to produce the same solution for a given problem as long as the same initial conditions are used. Notable deterministic techniques include graphical methods, graph-based methods, and sequential, linear, and mixed integer linear programming (MINLP).
The Hungarian algorithm in [67] is a widely employed optimization algorithm that often forms the basis for the development of new TA algorithms. It treats the TA problem as a combinatorial optimization problem and utilizes graph theory to solve it efficiently in polynomial time.
A significant portion of the deterministic optimization-based TA techniques related to mobile edge computing (MEC) applications focus mainly on minimizing energy consumption, as in [68]. Here, the problem of energy consumption minimization in UAV-enabled MEC networks is studied by jointly addressing the problems of service placement, UAV trajectory, task scheduling, and computation resource allocation, which have task latency and network resource constraints.
In [69], the authors examined the challenges associated with device association, task assignment, and computing resource allocation in multi-UAV-assisted MEC systems. The primary focus is on reducing the energy consumption of UAVs while adhering to task completion deadlines, maximum energy consumption constraints, and available computational resources. To address this complex problem, they adopt a method of decomposing it into convex subproblems using an iterative block coordinate descent (BCD) algorithm. The results demonstrate that their proposed methods outperform random association and offloading baselines.
In [70], the problem of dynamic TA in multi-UAV-enabled MEC systems is studied using a layered approach that addresses task scheduling, bit allocation, and UAV trajectory planning. The primary objective is to minimize total energy consumption while ensuring that the UAV trajectory complies with specific safety constraints for resolving UAV conflicts. The proposed algorithm utilizes a dynamic programming bidding method in conjunction with an alternating direction method of multipliers (ADMM). Comparative analysis against greedy and random strategies demonstrates that the proposed method yields lower energy consumption and effective conflict resolution.
The different optimization approaches, including [71], are centered on addressing the issue of UAV-priority-based resource coordination, especially in the context of reliable communication in a base station-controlled UAV network. The authors propose a mixed integer programming approach that utilizes smoothing and alternating optimization to manage channel assignment, exhibiting its superior efficiency compared to a baseline random channel assignment method. In [72], the focus is on the utilization of UAVs for logistics, specifically for product transfer from the warehouse to the customers. The authors present a dynamic allocation algorithm, treating this problem as a type of vehicle routing problem and taking into consideration load, endurance, and airspace constraints.
The work in [73] addresses the problem of energy efficiency and profit maximization in multiple UAVs-assisted MEC networks. The authors introduce a Lyapunov optimization method and propose the joint optimization algorithm for the deployment and resource allocation of UAVs (JOAoDR). Their proposed method outperforms the existing algorithm, demonstrating superior long-term performance.
3.2.3. Auction-Based DTA
With dynamic TA, UAVs adapt their behavior in response to environmental changes or the actions of other UAVs in order to enhance overall system performance. In [49], the authors investigated the multi-UAV TA (MRTA) problem within the SAR domain. In this scenario, multiple UAVs collaboratively undertake the task of searching for targets in a designated environment and retrieving them to the home base. The authors employed two distinct methods for TA to UAVs: an auction-inspired approach and a prediction-based approach. In the auction-based method, TA and execution processes occur concurrently. Conversely, in the prediction approach, a UAV selects a task to perform when it is not otherwise engaged in a task.
The work in [57] thoroughly examines TA problems for a distributed multi-UAV system under critical time constraints. The authors presented an extended CBBA algorithm designed to bypass local minima issues, utilizing a dynamic grouping allocation method to handle changing task information, UAV state, and network status. The proposed algorithm extends the CBBA algorithm in both the task inclusion phase and the consensus phase. Moreover, the introduction of a cluster strategy during the task inclusion phase enhances solution quality without requiring excessive computation. To further mitigate local minimal issues, the authors introduced a task-proportional selection method. Additionally, a block information-sharing strategy is implemented to preempt potential conflicts arising from dynamic changes.
The proposed DYMO-Auction algorithm is a cutting-edge distributed multi-objective TA approach for the online dynamic multi-UAV TA problem. This algorithm takes into account task quality requirements, travel distance, and load balancing, providing a comprehensive and efficient solution [62]. Through its formulation as an auction and behavioral process, DYMO-Auction effectively handles dynamically appearing tasks with quality requirements during missions. The algorithm leverages a utility function that incorporates cost, energy, distance, and task type, utilizing the weighted sum model to compute the cost function. This approach represents a significant advancement in addressing the complexities of multi-UAV TA.
The proposed dynamic TA for heterogeneous unmanned underwater vehicles (UUVs) is based on the CBBA algorithm [53]. This new approach takes into account various factors such as path, time, and UUV tour for assessing marginal utility. It introduces new marginal reward, cost, and utility functions, thereby enhancing the original CBBA. This improvement restructures the TA process into multiple static TAs with discrete time steps, making CBBA suitable for dynamic scenarios.
The authors in [50] have thoroughly investigated the multi-UAV task assignment problem. They focused on efficiently transporting dynamically appearing packages from their initial locations to their respective destinations using a fleet of distributed UAVs. Each UAV can transport multiple packages simultaneously based on its capacity. However, the delivery of packages must adhere to their prescribed time windows. The authors tackled this problem by formulating a two-stage optimization problem and employing a UAV-group assignment strategy. In the first stage, each UAV selects feasible package groups considering the time window and capacity constraints. In the second stage, an auction-based distributed assignment of the feasible package groups is carried out, assisted by an integer programming model.
3.2.4. Other Approaches
In [64], the authors effectively tackled the complex challenge of dynamic TA for multi-UAVs in large-scale missions by leveraging optimal mass transport theory. They adeptly addressed the scalability issue by grouping multi-UAVs to tackle regional tasks efficiently. The authors skillfully tailored the optimal mass transport formulation to allocate tasks to the multi-UAVs in unknown environments dynamically. By intelligently clustering tasks into regional groups and adaptively grouping the multi-UAVs based on the number of tasks in each region, they significantly reduced the computational load, especially when dealing with a high number of tasks. Their method also includes a task reallocation mechanism based on a task pool to ensure balanced TA and improve UAV utilization.
The work in [55] introduced the heuristic Swarm-GAP algorithm, which ingeniously combines a swarm intelligence strategy and the generalized assignment problem (GAP) method [74]. Swarm-GAP represents a distributed TA approach founded on theoretical models of the division of labor seen in social insect colonies. Trials were conducted in the RoboCup Rescue Simulator to evaluate the effectiveness of the Swarm-GAP algorithm. Furthermore, the researchers extended the algorithm to accommodate dynamic scenarios, wherein certain attributes change during system execution. These dynamic attributes include the loss of members of the UAV team or onboard sensor failures. In situations characterized by dynamic and time-constrained scenarios, where new tasks may be introduced during task execution, the necessity arises to reassign some of the already allocated tasks. Such reassignments lead to the creation of empty time slots in the task lists of UAVs, which can then be filled with newly arrived tasks.
The assessment of task allocation algorithms for UAVs is founded on the UAV type, task assignment methods, algorithm complexity, performance assessment, task independence, target priority, and the environment. The comparisons can be found in Table 6 and Table 7, respectively.
Table 6.
Comparison of task allocation algorithms for UAVs based on UAV types, task assignment methods, algorithm complexity, and performance evaluation.
Table 7.
Comparison of task allocation algorithms in terms of task interdependency, target, priority, and environment.
3.3. Computational Complexity
The computational complexity of various algorithms is shown in Table 8, which shows the theoretical performance bounds of each algorithm in terms of time and space requirements.
Table 8.
Computational complexity.
Scalability and real-world applicability of algorithms are crucial factors in the deployment of UAV systems, especially as the number of UAVs and tasks grows. Algorithms with high time complexity, such as those with exponential or factorial growth, become computationally infeasible as problem size increases. This limits their ability to manage large-scale UAV operations where numerous UAVs and tasks are involved, creating significant scalability bottlenecks. Additionally, high space complexity can render algorithms impractical, particularly in UAV systems with constrained memory resources, such as embedded systems. Understanding the key contributors to complexity—such as the number of UAVs, tasks, and task dependencies—can help identify the algorithm’s limitations and target areas for optimization.
In real-world applications, the impact of these complexities is profound. Algorithms with high time complexity often fail to meet the real-time performance requirements essential in dynamic environments where rapid decision making is critical. Moreover, UAVs typically operate with limited computational resources and memory, making algorithms with high space complexity unsuitable. This, in turn, affects energy efficiency, as excessive computational demands can lead to higher energy consumption, reducing the UAV’s flight time. Scalable algorithms, therefore, are not only more efficient but also more robust, adapting better to changes in the environment or variations in the number of UAVs and tasks, thereby ensuring reliable and effective UAV operations in real-world scenarios.
4. Gaps and Discussion
This paper offers a thorough exploration of TA algorithms for static and dynamic scenarios. The CBBA algorithm serves as a solid foundation for auction-based decentralized TA strategies. The PI algorithm builds upon the CBBA algorithm by enhancing the task-costing mechanism. It is interesting to note the thorough review and comparison of several key TA algorithms, along with their respective parameters and constraints.
The analysis provides an overview of Task Assignment (TA) algorithms, but it has limitations that must be addressed for a more comprehensive understanding. The analysis focuses primarily on Consensus-Based Bundle Algorithm (CBBA) and Particle-Gaps, while a comprehensive analysis would consider a wider range of algorithms, including those based on optimization techniques, machine learning models, and multi-agent systems. Additionally, a deeper comparison of algorithms would involve examining performance metrics, computational complexity, and the applicability of these algorithms to different scenarios.
The analysis also has limitations in its consideration of parameters, with an overemphasis on static parameters and a lack of exploration of dynamic parameters and their impact on algorithm performance. Furthermore, the oversimplification of dynamic environments and task dynamics needs to be addressed. Specific examples of how algorithms can effectively manage rapidly changing environments and the dynamic nature of tasks must be provided.
Finally, the evaluation methodology within the analysis requires improvement. Clear performance metrics are essential for effective comparison of different algorithms, and experimental validation is necessary to support the claims made and provide practical insights into real-world applicability.
Table 9 provides a useful comparison of the parameters considered in the reviewed papers, as well as a comparison of algorithms intended for their applications and the considered environment. It also highlights the static or dynamic basis for task selection, such as task costing mechanism, battery/fuel limit, and maximum task execution limit. For dynamic cases, each algorithm considers different tasks or UAV/vehicle-related parameters as constant or dynamic. Table 9 can provide a baseline for extending the presented algorithms by incorporating more constraints.
Table 9.
Open issues.
It is evident from Table 9 that some applications like military and SAR are considered both static and dynamic in the listed papers. Similarly, most of the algorithms select tasks based on a single parameter like distance or time, whereas some algorithms select tasks based on multiple parameters. Additionally, some parameters like task location, vehicle speed, and battery limit are taken as errors, i.e., there can be no fault in the observation of these parameters.
Based on the above discussion, there is scope for improvement in all algorithms by considering more parameters. Table 9 provides a baseline for promising research directions. Some of the essential parameters that should be considered while improving these algorithms are task complexity levels, environmental conditions, urgency, multi-objective optimization, and dynamic adjustments in highly uncertain and changing environments. By incorporating these parameters, researchers can develop more effective and adaptable TA strategies for Multi-UAV in diverse environments, as described below.
4.1. Parameter Consideration and Diversity
The paper focuses on the review and comparative analysis of multiple algorithms for swarm behavior, particularly in TA. The algorithms are described concisely, and their operational frameworks are examined comprehensively, considering various parameters and constraints. However, there is a need to expand the analysis to include scenarios requiring the coordination of multiple UAVs or vehicles for task execution. The paper aims to extend its review framework to include algorithms pertaining to diverse swarm behaviors, such as self-assembly, collective exploration, and pattern formation.
The current literature predominantly emphasizes distance and time costs as primary parameters for TA in Multi-UAV. However, there is a significant gap in considering a broader array of parameters and attributes pertaining to tasks, UAVs, or UAVs before TA. Incorporating varied task attributes, like complexity levels, urgency, or environmental conditions, remains unexplored but crucial for robust task assignment strategies.
4.2. Dynamic Environment Adaptability
- Static vs. Dynamic Considerations: The review predominantly explores TA strategies in static and dynamic cases.
- Limited Dynamic Adaptation: Further exploration is needed for strategies capable of dynamic adjustments in highly uncertain and changing environments, ensuring adaptability and efficiency.
4.3. Task Selection Criteria and Error-Free Parameters
- Parameter Bias: Many algorithms predominantly base task selection on singular parameters like distance or time, limiting the versatility of TA.
- Assumed Error-Free Parameters: Some parameters (e.g., task location, vehicle speed, battery limits) are assumed to have no observational faults, potentially overlooking critical aspects of real-world scenarios.
- Potential for Algorithmic Enhancements and Scope of Research Directions: The discussion highlights the need for improvements across all algorithms, providing a foundation for promising research avenues in TA strategies.
4.4. Multi-Objective Optimization and Real-World Implementation Challenges
Exploring multi-objective optimization approaches in TA offers the potential for balancing competing objectives. While theoretical advancements have been made, the practical application of these strategies may present challenges related to scalability, robustness, and feasibility in real-world implementation. During the Lushan earthquake, a UAV system was used to search collapsed buildings in mountain areas, successfully identifying 80% of the victims for rescue operations [83]. This demonstrates that real-world implementation faces challenges and experiences degraded performance. SAR operations must achieve maximum performance, reaching the highest possible level in real-world scenarios to minimize human loss. In disaster situations, traditional methods often face limitations in terms of time and accuracy due to the varying degrees and extent of the damage.
Localizing the affected area or the survivors during SAR operation is crucial, and the localization techniques are limited to a few hundred meters. The infrared sensors mentioned in [84] are effective up to a maximum range of 7 m, which could potentially limit their utility in SAR operations. Additionally, in autonomous operations in mountainous terrain [85], there may be challenges with GPS signal coverage, which could make it challenging, and at times impossible, to accurately determine the victim’s location for transmission. The UAV path planning problem for SAR presents an optimization challenge, seeking to identify a feasible path while accounting for multiple parameters and constraints. In SAR, the UAV must navigate obstacle-rich environments such as urban or indoor areas, necessitating a collision-free, optimal path. In a dynamic SAR scenario, task statuses may change. For example, a UAV could encounter a malfunction, task durations could fluctuate, and tasks may expire or emerge, prompting UAVs to reassign tasks to accommodate new ones and create space for unallocated tasks.
4.5. Benchmarking and Performance Evaluation
Many existing studies oversimplify the UAV dynamic task allocation model, resulting in models that do not effectively meet actual requirements. This oversimplification is evident in assuming a two-dimensional space and static targets, leading to low fault tolerance and poor adaptability. Current research often overlooks task allocation complexity, leading to inefficient solutions for large-scale problems. Key UAV attributes such as distance, speed, flight performance, and damage degree need to be adequately considered, which hinder the coordination of UAV swarms in mission phases. The dynamic task allocation problem is complex in uncertain environments. Most UAV swarm systems lack consideration for reconfigurability and autonomous decision-making abilities. The scale of UAV swarms is expanding, requiring revisions to their capabilities. Algorithms need help to meet real-time allocation requirements in dynamic task allocation, considering UAV damage, task updates, new targets, and emergencies within limited operation time. Achieving real-time and accurate allocation for large-scale UAV swarms takes significant time and effort.
Standardized benchmarks and rigorous performance evaluation metrics are crucial for comparing TA strategies and identifying superior approaches. Such benchmarks and metrics would aid researchers in making clearer assessments and comparisons between different strategies, thereby facilitating advancements in the field. By establishing a standardized framework for performance evaluation, researchers can evaluate the effectiveness, efficiency, and robustness of algorithms and identify areas for improvement. This can lead to the development of more effective and adaptable TA strategies for Multi-UAV in diverse environments.
Standard benchmarks and performance metrics should consider the complexity, flexibility, scalability, UAV capability, and efficient resource utilization of the TA algorithm. These benchmarks aid in comparing the algorithm’s performance and identifying suitable options. The TA algorithm must be low in complexity for SAR operation, as this will ensure robustness for real-time implementation. The flexibility ensures that the TA algorithm can adapt to dynamic scenarios. It increases the workload for SAR operations on UAVs and designs scalable algorithms to adjust to dynamic scenarios. Power utilization is the most important performance metric that ensures the UAV’s flight time. Efficient use of the UAV’s power resources helps increase the operations performed by the UAVs. Finally, with the fixed resources in terms of power and number of UAVs, the number of tasks performed by the UAV becomes a critical performance metric that demonstrates the performance of the TA algorithm.
5. Open Issues
A large number of studies on the static and dynamic TA methods for multi-UAV systems have contributed to the establishment and solution of problem models. Still, there are certain areas that need investigation to comprehend the TA problem for real-world complex scenarios. From the literature review analysis, the following issues are identified that need further research.
5.1. Realistic Parameters and Constraints
In most existing research papers for dynamic and static TA, the considered parameters and constraints are oversimplified, as given in [77,86]. Therefore, TA algorithms solve problems for ideal and easy case scenarios [87]. Hence, algorithms either do not meet real-time requirements or give degraded performance when deployed in the actual environment. In Ref. [88], first, a static military environment is considered where deadline, battery, task location, and UAV speed are considered constant. Whereas a dynamic military environment is considered such that the algorithm can handle new tasks arrived during the task execution phase. In both cases, UAV speed is constant, but actual speed is a variable parameter.
A UAV may get faulty in a multi-UAV system during execution of tasks and tasks assigned to faulty UAV need to be assigned to some other UAV. This is an important requirement so that overall performance remains at optimum level [89]. However, there are few research papers that consider the occurrence of a fault in UAV [90]; otherwise, this is a neglected parameter in multi-UAV systems operating in dynamic environments [91]. Similarly, task location in case of dynamic environments, like military, SAR, etc., may change during task execution. But this parameter is also the least considered in a dynamic environment. Therefore, designing a multi-UAV system for field application requires consideration of all dynamic parameters and constraints. Hence, designing the TA algorithm with the consideration of realistic parameters/constraints is still an open research area.
5.2. Sensitivity Analysis of Algorithm
In a dynamic environment, many task and UAV-related parameters change during task execution. Therefore, sensitivity analysis of the algorithm is required, which describes the amount of uncertainty an algorithm can handle efficiently. The authors in [92] were the first ones who applied sensitivity analysis to their proposed auction-based multi-robot TA algorithm. By performing sensitivity analysis, an overall algorithm performance can be evaluated in a dynamic environment. This can also contribute in selection of an algorithm for a particular application, and hence, sensitivity analysis is still an open research area.
5.3. Complexity Analysis for Real-World Applications
UAVs have limited onboard energy, computational, etc. resources [93,94], so TA algorithms with minimum complexity are desirable. Many TA algorithms are too complex, such that they cannot be implemented in applications [47]. Therefore, complexity analysis of a TA algorithm, particularly for dynamic scenarios, is of prime importance. So, designing low-complexity TA algorithms for multi-UAV systems for different applications is still an open area.
5.4. Scalability Analysis of Algorithm
There are dynamic applications, like military, SAR, etc., which may require augmenting more number of UAVs in the multi-UAV system during the task execution [47]. In such cases, there is a need to carefully analyze some parameters, such as algorithm consensus time, due to the reassignment of tasks and inter-UAV communication. An elevation in these parameters leads to a decline in the overall performance of the multi-UAV system. Scalability analysis of a multi-UAV TA algorithm is generally not evaluated in the research articles. Therefore, designing a TA algorithm for multi-UAV systems having less consensus time and low inter-UAV communication is desirable and is still an open research area.
5.5. Task Allocation to a Joint Human and Multi-UAV System
Advancement of technology and reduced manufacturing cost results in the utilization of UAVs in many fields like military [95], SAR, package delivery [96], etc. Extensive research is available for human–robot collaboration in assembly and industrial settings, but the allocation of tasks to humans and a multi-UAV system operating in collaboration is an open area for research and needs investigation [88,97,98].
5.6. Research Challenges
The TA to a multi-UAV system is an NP-hard problem [99], and handling every possible dynamic event during task execution is very difficult. In dynamic scenarios like military and SAR, the occurrence of dynamic events is uncertain, and researchers [95] have shown through simulation with the limitation that their proposed algorithms can handle some dynamic events. Therefore, a major research challenge in TA to a multi-UAV system is to have a standardized environment where different dynamic events can be created at any time during the task execution, and the performance of the algorithm can be analyzed against different parameters. In this way, the performance of different algorithms can be compared and may result in the selection of algorithms for any application.
6. Conclusions
This paper presents a comprehensive review and comparative analysis of various algorithms relevant to multi-UAV systems, particularly focusing on Task Allocation (TA). Each algorithm is succinctly described, along with a thorough examination of the parameters and constraints within their operational frameworks. Additionally, the paper includes a comparative table that serves as a valuable reference for potential extensions or improvements in this field. The reviewed algorithms primarily belong to the Single-Task Multi-UAV (ST-MU) domain and cater to scenarios involving the assignment of single tasks to multiple UAVs. However, the paper acknowledges the necessity of expanding this analysis to encompass scenarios requiring the coordination of multiple UAVs for task execution. Furthermore, the paper acknowledges the broader spectrum of multi-UAV behaviors outlined in [100], which includes behaviors beyond TA, such as self-assembly, collective exploration, and pattern formation. Recognizing the importance and significance of these behaviors, the paper aims to enhance its review framework by incorporating algorithms pertaining to diverse multi-UAV system behaviors. This comprehensive review will enable researchers to pursue research on TA and optimization algorithms tailored for Specific Absorption Rate (SAR) scenarios. The paper also highlights important future research directions in the task allocation domain, including the consideration of realistic TA parameters and constraints, sensitivity analysis of algorithms against uncertain dynamic events, the development of low-complexity algorithms for real-world applications, the development of scalable algorithms, and task allocation to joint human and multi-UAV systems. The future of multi-UAV task allocation for search and rescue (SAR) involves improving dynamic environment handling, integrating advanced technologies like AI and machine learning, strengthening human–UAV collaboration, optimizing task allocation, and ensuring robustness, reliability, and ethical deployment.
Author Contributions
Conceptualization, S.A.G., M.S. and R.A.Q.; methodology, S.A.G. and M.S.; software, S.A.G., M.S. and R.A.Q.; validation, formal analysis and investigation, S.A.G., M.S., R.A.Q., M.F.S. and S.A.K.; resources, S.A.G., M.S. and R.A.Q.; data curation, S.A.G., M.S. and R.A.Q.; writing—original draft preparation, S.A.G., M.S., R.A.Q., M.F.S. and S.A.K.; writing—review and editing, S.A.G., M.S., R.A.Q., M.F.S. and S.A.K.; visualization, S.A.G., M.S., R.A.Q., M.F.S. and S.A.K.; supervision, S.A.G. and M.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Han, D.; Jiang, H.; Wang, L.; Zhu, X.; Chen, Y.; Yu, Q. Collaborative Task Allocation and Optimization Solution for Unmanned Aerial Vehicles in Search and Rescue. Drones 2024, 8, 138. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, J. Analysis and optimization of multiple unmanned aerial vehicle-assisted communications in post-disaster areas. IEEE Trans. Veh. Technol. 2018, 67, 12049–12060. [Google Scholar] [CrossRef]
- Niedzielski, T.; Jurecka, M.; Miziński, B.; Pawul, W.; Motyl, T. First successful rescue of a lost person using the human detection system: A case study from Beskid Niski (SE Poland). Remote Sens. 2021, 13, 4903. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned aerial vehicles for search and rescue: A survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Task assignment algorithms for unmanned aerial vehicle networks: A comprehensive survey. Veh. Commun. 2022, 35, 100469. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, H.; Xue, R. Review of dynamic task allocation methods for UAV swarms oriented to ground targets. Complex Syst. Model. Simul. 2021, 1, 163–175. [Google Scholar] [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Swarm robotics: Past, present, and future [point of view]. Proc. IEEE 2021, 109, 1152–1165. [Google Scholar] [CrossRef]
- Cao, Y.U.; Kahng, A.B.; Fukunaga, A.S. Cooperative mobile robotics: Antecedents and directions. Robot. Colon. 1997, 7–27. [Google Scholar]
- Tan, Y.; Zheng, Z.y. Research advance in swarm robotics. Def. Technol. 2013, 9, 18–39. [Google Scholar] [CrossRef]
- Wu, G.; Pedrycz, W.; Li, H.; Ma, M.; Liu, J. Coordinated planning of heterogeneous earth observation resources. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 109–125. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Zhao, N.; Meng, W.; Gui, G.; Chen, Y.; Adachi, F. Transceiver design and multihop D2D for UAV IoT coverage in disasters. IEEE Internet Things J. 2018, 6, 1803–1815. [Google Scholar] [CrossRef]
- Kumar, A.; Sharma, K.; Singh, H.; Srikanth, P.; Krishnamurthi, R.; Nayyar, A. Drone-based social distancing, sanitization, inspection, monitoring, and control room for COVID-19. In Artificial Intelligence and Machine Learning for COVID-19; Springer: Berlin/Heidelberg, Germany, 2021; Chapter 8; pp. 153–173. [Google Scholar]
- Euchi, J. Do drones have a realistic place in a pandemic fight for delivering medical supplies in healthcare systems problems? Chin. J. Aeronaut. 2021, 34, 182–190. [Google Scholar] [CrossRef]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Sawant, R.; Singh, C.; Shaikh, A.; Aggarwal, A.; Shahane, P.; Harikrishnan, R. Mine detection using a swarm of robots. In Proceedings of the 2022 International Conference on Advances in Computing, Communication and Applied Informatics (ACCAI), Chennai, India, 28–29 January 2022; IEEE: Piscataway, NY, USA, 2022; pp. 1–9. [Google Scholar]
- Zahugi, E.M.H.; Shanta, M.M.; Prasad, T. Oil spill cleaning up using swarm of robots. In Advances in Computing and Information Technology, Proceedings of the Second International Conference on Advances in Computing and Information Technology (ACITY), Chennai, India, 13–15 July 2012; Springer: Berlin/Heidelberg, Germany, 2013; Volume 3, pp. 215–224. [Google Scholar]
- Sangeetha, M.; Srinivasan, K. Swarm robotics: A new framework of military robots. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1717, p. 12017. [Google Scholar]
- Dell’Erba, R.; Moriconi, C. HARNESS: A robotic swarm for harbour security. In Proceedings of the Port and Regional Maritime Security Symposium, Lerici, Italy, 21–23 May 2012. [Google Scholar]
- Qamar, R.A.; Sarfraz, M.; Ghauri, S.A.; Baig, N.A.; Cheema, T.A. Optimization of Dynamic Task Allocation for Multi-UAV Systems: Search and Rescue Scenario. 2024, preprint.
- Alwateer, M.; Loke, S.W.; Fernando, N. Enabling drone services: Drone crowdsourcing and drone scripting. IEEE Access 2019, 7, 110035–110049. [Google Scholar] [CrossRef]
- Huo, C.; Hameed, J.; Nawaz, A.; Shah, S.A.R.; Alqahtani, W.; Maqsoom, A.; Anwar, M.K. Scientific risk performance analysis and development of disaster management framework: A case study of developing Asian countries. J. King Saud Univ.-Sci. 2021, 33, 101348. [Google Scholar] [CrossRef]
- Adeel, A.; Gogate, M.; Farooq, S.; Ieracitano, C.; Dashtipour, K.; Larijani, H.; Hussain, A. A survey on the role of wireless sensor networks and IoT in disaster management. In Geological Disaster Monitoring Based on Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2019; Chapter 5; pp. 57–66. [Google Scholar]
- Wu, P.; Xie, J.; Chen, J. Safe path planning for unmanned aerial vehicle under location uncertainty. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Sapporo, Japan, 9–11 October 2020; IEEE: Piscadaway, NJ, USA, 2020; pp. 342–347. [Google Scholar]
- Yang, J.; Zhao, D.; Xiang, X.; Shi, Y. Robotic brain storm optimization: A multi-target collaborative searching paradigm for swarm robotics. In International Conference on Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2021; pp. 155–167. [Google Scholar]
- Liu, S.; Kurniawan, E.; Tan, P.H.; Zhang, P.; Sun, S.; Ye, S. Dynamic scheduling for heterogeneous resources with time windows and precedence relation. In TENCON 2017-2017 IEEE Region 10 Conference; IEEE: Piscadaway, NJ, USA, 2017; pp. 3045–3050. [Google Scholar]
- Wang, G.; Lv, X.; Yan, X. A Two-Stage Distributed Task Assignment Algorithm Based on Contract Net Protocol for Multi-UAV Cooperative Reconnaissance Task Reassignment in Dynamic Environments. Sensors 2023, 23, 7980. [Google Scholar] [CrossRef]
- Skaltsis, G.M.; Shin, H.S.; Tsourdos, A. A Review of Task Allocation Methods for UAVs. J. Intell. Robot. Syst. 2023, 109, 76. [Google Scholar] [CrossRef]
- Qian, F.; Su, K.; Liang, X.; Zhang, K. Task Assignment for UAV Swarm Saturation Attack: A Deep Reinforcement Learning Approach. Electronics 2023, 12, 1292. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, C.; Gombolay, M. Heterogeneous graph attention networks for scalable multi-robot scheduling with temporospatial constraints. Auton. Robot. 2022, 46, 249–268. [Google Scholar] [CrossRef]
- Li, J.; Chen, R.; Peng, T. A distributed task rescheduling method for UAV swarms using local task reordering and deadlock-free task exchange. Drones 2022, 6, 322. [Google Scholar] [CrossRef]
- Zhang, A.; Yang, M.; Bi, W.; Gao, F. Distributed task allocation with critical tasks and limited capacity. Robotica 2021, 39, 2008–2032. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Sun, Q.; Tian, Y.; Jiang, T. Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints. J. Supercomput. 2021, 77, 111–132. [Google Scholar] [CrossRef]
- Zitouni, F.; Harous, S.; Maamri, R. A distributed approach to the multi-robot task allocation problem using the consensus-based bundle algorithm and ant colony system. IEEE Access 2020, 8, 27479–27494. [Google Scholar] [CrossRef]
- Geng, N.; Meng, Q.; Gong, D.; Chung, P.W. How good are distributed allocation algorithms for solving urban search and rescue problems? A comparative study with centralized algorithms. IEEE Trans. Autom. Sci. Eng. 2018, 16, 478–485. [Google Scholar] [CrossRef]
- Turner, J.; Meng, Q.; Schaefer, G.; Whitbrook, A.; Soltoggio, A. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans. Cybern. 2017, 48, 2583–2597. [Google Scholar] [CrossRef]
- Bai, X.; Yan, W.; Cao, M. Clustering-based algorithms for multivehicle task assignment in a time-invariant drift field. IEEE Robot. Autom. Lett. 2017, 2, 2166–2173. [Google Scholar] [CrossRef]
- Whitbrook, A.; Meng, Q.; Chung, P.W. A novel distributed scheduling algorithm for time-critical multi-agent systems. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscadaway, NJ, USA, 2015; pp. 6451–6458. [Google Scholar]
- Zhao, W.; Meng, Q.; Chung, P.W. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2015, 46, 902–915. [Google Scholar] [CrossRef]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Qamar, R.A.; Sarfraz, M.; Ghauri, S.A.; Mahmood, A. TRMaxAlloc: Maximum task allocation using reassignment algorithm in multi-UAV system. Comput. Commun. 2023, 206, 110–123. [Google Scholar] [CrossRef]
- Muhammad, N.B.; Ghauri, S.A.; Sarfraz, M.; Aftab, A. DSCE: Comparative Analysis of Heuristic Computational Techniques. IEIE Trans. Smart Process. Comput. 2021, 10, 259–272. [Google Scholar] [CrossRef]
- Al-Yafi, K.; Lee, H. Centralized vs. Market-Based Approaches to Mobile Task Allocation Problem: State-of-the-Art; Brunel University: London, UK, 2009. [Google Scholar]
- Skaltsis, G.M.; Shin, H.S.; Tsourdos, A. A survey of task allocation techniques in MAS. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: Piscadaway, NJ, USA, 2021; pp. 488–497. [Google Scholar]
- Gao, S.; Wu, J.; Ai, J. Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm. Soft Comput. 2021, 25, 7155–7167. [Google Scholar] [CrossRef]
- Wei, C.; Hindriks, K.V.; Jonker, C.M. Dynamic task allocation for multi-robot search and retrieval tasks. Appl. Intell. 2016, 45, 383–401. [Google Scholar] [CrossRef]
- Bai, X.; Fielbaum, A.; Kronmüller, M.; Knoedler, L.; Alonso-Mora, J. Group-based distributed auction algorithms for multi-robot task assignment. IEEE Trans. Autom. Sci. Eng. 2022, 20, 1292–1303. [Google Scholar] [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Wang, M. Distributed grouping cooperative dynamic task assignment method of UAV swarm. Appl. Sci. 2022, 12, 2865. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, H.; Wu, G. A Dynamic Task Scheduling Method for Multiple UAVs Based on Contract Net Protocol. Sensors 2022, 22, 4486. [Google Scholar] [CrossRef]
- Wu, X.; Gao, Z.; Yuan, S.; Hu, Q.; Dang, Z. A dynamic task allocation algorithm for heterogeneous UUV swarms. Sensors 2022, 22, 2122. [Google Scholar] [CrossRef]
- Yang, M.; Bi, W.; Zhang, A.; Gao, F. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl. Intell. 2022, 52, 1582–1601. [Google Scholar] [CrossRef]
- Amorim, J.C.; Alves, V.; de Freitas, E.P. Assessing a swarm-GAP based solution for the task allocation problem in dynamic scenarios. Expert Syst. Appl. 2020, 152, 113437. [Google Scholar] [CrossRef]
- Dai, W.; Lu, H.; Xiao, J.; Zeng, Z.; Zheng, Z. Multi-robot dynamic task allocation for exploration and destruction. J. Intell. Robot. Syst. 2020, 98, 455–479. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, P.; Du, G.; Li, F. A distributed method for dynamic multi-robot task allocation problems with critical time constraints. Robot. Auton. Syst. 2019, 118, 31–46. [Google Scholar] [CrossRef]
- Whitbrook, A.; Meng, Q.; Chung, P.W. Reliable, distributed scheduling and rescheduling for time-critical, multiagent systems. IEEE Trans. Autom. Sci. Eng. 2017, 15, 732–747. [Google Scholar] [CrossRef]
- Zhang, K.; Zheng, H.; Chen, Z.; Zhai, X. Cooperative task assignment of heterogeneous UAVs in SEAD mission using a mutil-type genes chromosome genetic algorithm. In Proceedings of the 2021 4th International Conference on Algorithms, Computing and Artificial Intelligence, Sanya, China, 22–24 December 2021; IEEE: Piscadaway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Jang, I.; Shin, H.S.; Tsourdos, A. Anonymous hedonic game for task allocation in a large-scale multiple agent system. IEEE Trans. Robot. 2018, 34, 1534–1548. [Google Scholar] [CrossRef]
- Qamar, R.A.; Sarfraz, M.; Rahman, A.; Ghauri, S.A. Multi-criterion multi-UAV task allocation under dynamic conditions. J. King Saud Univ. Comput. Inf. Sci. 2023, 35, 101734. [Google Scholar] [CrossRef]
- Baroudi, U.; Alshaboti, M.; Koubaa, A.; Trigui, S. Dynamic multi-objective auction-based (DYMO-auction) task allocation. Appl. Sci. 2020, 10, 3264. [Google Scholar] [CrossRef]
- Choudhury, S.; Gupta, J.K.; Kochenderfer, M.J.; Sadigh, D.; Bohg, J. Dynamic multi-robot task allocation under uncertainty and temporal constraints. Auton. Robot. 2022, 46, 231–247. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, X. Dynamic task allocation method of swarm robots based on optimal mass transport theory. Symmetry 2020, 12, 1682. [Google Scholar] [CrossRef]
- Lagoudakis, M.G.; Markakis, E.; Kempe, D.; Keskinocak, P.; Kleywegt, A.J.; Koenig, S.; Tovey, C.A.; Meyerson, A.; Jain, S. Auction-Based Multi-Robot Routing. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2005; Volume 5, pp. 343–350. [Google Scholar]
- Mokhatab, S.; Mak, J.Y.; Valappil, J.V.; Wood, D.A. (Eds.) Chapter 5—Natural gas liquefaction cycle enhancements and optimization. In Handbook of Liquefied Natural Gas; Gulf Professional Publishing: Boston, MA, USA, 2014; pp. 229–257. [Google Scholar]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Qu, Y.; Dai, H.; Wang, H.; Dong, C.; Wu, F.; Guo, S.; Wu, Q. Service provisioning for UAV-enabled mobile edge computing. IEEE J. Sel. Areas Commun. 2021, 39, 3287–3305. [Google Scholar] [CrossRef]
- Ei, N.N.; Kang, S.W.; Alsenwi, M.; Tun, Y.K.; Hong, C.S. Multi-UAV-assisted MEC system: Joint association and resource management framework. In Proceedings of the 2021 International Conference on Information Networking (ICOIN); IEEE: Piscadaway, NJ, USA, 2021; pp. 213–218. [Google Scholar]
- Luo, Y.; Ding, W.; Zhang, B. Optimization of task scheduling and dynamic service strategy for multi-UAV-enabled mobile-edge computing system. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 970–984. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Zhang, X.; Zhao, D.; Li, H. Task allocation for multi-agent systems based on distributed many-objective evolutionary algorithm and greedy algorithm. IEEE Access 2020, 8, 19306–19318. [Google Scholar] [CrossRef]
- Fang, Z.; Hong-Hai, Z. A method for “last mile” distribution demand for drones. In Proceedings of the 2020 IEEE 5th International Conference on Intelligent Transportation Engineering (ICITE), Jeju Island, Republic of Korea, 13–16 January 2021; IEEE: Piscadaway, NJ, USA, 2020; pp. 561–564. [Google Scholar]
- Zheng, Y.; Yang, B.; Chen, C. Joint optimization of the deployment and resource allocation of UAVs in vehicular edge computing and networks. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Virtual Conference, 18 November–16 December 2020; IEEE: Piscadaway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Ferreira, P.R., Jr.; Boffo, F.S.; Bazzan, A.L. A swarm based approximated algorithm to the extended generalized assignment problem (E-GAP). In Proceedings of the 6th International Joint Conference on Autonomous Agents and Multiagent Systems, New York, NY, USA, 14–18 May 2007; pp. 1–3. [Google Scholar]
- Whitbrook, A.; Meng, Q.; Chung, P.W. A robust, distributed task allocation algorithm for time-critical, multi agent systems operating in uncertain environments. In Advances in Artificial Intelligence: From Theory to Practice, Proceedings of the 30th International Conference on Industrial Engineering and Other Applications of Applied Intelligent Systems, IEA/AIE 2017, Arras, France, 27–30 June 2017; Proceedings, Part II 30; Springer: Berlin/Heidelberg, Germany, 2017; pp. 55–64. [Google Scholar]
- Chen, Y.; Yang, D.; Yu, J. Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2853–2872. [Google Scholar] [CrossRef]
- Turner, J.; Meng, Q.; Schaefer, G. Increasing allocated tasks with a time minimization algorithm for a search and rescue scenario. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscadaway, NJ, USA, 2015; pp. 3401–3407. [Google Scholar]
- Bapat, A.; Bora, B.R.; Herrmann, J.W.; Azarm, S.; Xu, H.; Otte, M.W. Distributed Task Allocation Algorithms for Multi-Agent Systems With Very Low Communication. IEEE Access 2022, 10, 124083–124102. [Google Scholar] [CrossRef]
- Bai, X.; Yan, W.; Ge, S.S. Distributed task assignment for multiple robots under limited communication range. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 4259–4271. [Google Scholar] [CrossRef]
- Park, B.; Kang, C.; Choi, J. Cooperative multi-robot task allocation with reinforcement learning. Appl. Sci. 2021, 12, 272. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Müller, F.M.; Yang, S. Ant colony optimization with local search for dynamic traveling salesman problems. IEEE Trans. Cybern. 2016, 47, 1743–1756. [Google Scholar] [CrossRef]
- Luo, L.; Chakraborty, N.; Sycara, K. Distributed algorithms for multirobot task assignment with task deadline constraints. IEEE Trans. Autom. Sci. Eng. 2015, 12, 876–888. [Google Scholar] [CrossRef]
- Qi, J.; Song, D.; Shang, H.; Wang, N.; Hua, C.; Wu, C.; Qi, X.; Han, J. Search and rescue rotary-wing uav and its application to the lushan ms 7.0 earthquake. J. Field Robot. 2016, 33, 290–321. [Google Scholar] [CrossRef]
- Valsan, A.; Parvathy, B.; GH, V.D.; Unnikrishnan, R.; Reddy, P.K.; Vivek, A. Unmanned aerial vehicle for search and rescue mission. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI) (48184), Tirunelveli, India, 15–17 June 2020; IEEE: Piscadaway, NJ, USA, 2020; pp. 684–687. [Google Scholar]
- Bejiga, M.B.; Zeggada, A.; Nouffidj, A.; Melgani, F. A convolutional neural network approach for assisting avalanche search and rescue operations with UAV imagery. Remote Sens. 2017, 9, 100. [Google Scholar] [CrossRef]
- Luo, L.; Chakraborty, N.; Sycara, K. Provably-good distributed algorithm for constrained multi-robot task assignment for grouped tasks. IEEE Trans. Robot. 2014, 31, 19–30. [Google Scholar] [CrossRef]
- Hwang, N.E.; Kim, H.J.; Kim, J.G. Centralized task allocation and alignment based on constraint table and alignment rules. Appl. Sci. 2022, 12, 6780. [Google Scholar] [CrossRef]
- Petzoldt, C.; Harms, M.; Freitag, M. Review of task allocation for human–robot collaboration in assembly. Int. J. Comput. Integr. Manuf. 2023, 36, 1675–1715. [Google Scholar] [CrossRef]
- Sujit, P.; Sousa, J. Multi-UAV task allocation with communication faults. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; IEEE: Piscadaway, NJ, USA, 2012; pp. 3724–3729. [Google Scholar]
- Wang, Q.; Jia, Q.; Ren, D.; Wang, Y. Multi-UAV task allocation method considering single point of failure. In Proceedings of the 2023 2nd International Conference on Robotics, Artificial Intelligence and Intelligent Control (RAIIC), Mianyang, China, 1–13 August 2023; IEEE: Piscadaway, NJ, USA, 2023; pp. 79–83. [Google Scholar]
- Wu, X.; Yin, Y.; Xu, L.; Wu, X.; Meng, F.; Zhen, R. Multi-UAV task allocation based on improved genetic algorithm. IEEE Access 2021, 9, 100369–100379. [Google Scholar] [CrossRef]
- Clinch, K.; Wood, T.A.; Manzie, C. Auction algorithm sensitivity for multi-robot task allocation. Automatica 2023, 158, 111239. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. Stat. Mech. Its Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Oh, G.; Kim, Y.; Ahn, J.; Choi, H.L. Task allocation of multiple UAVs for cooperative parcel delivery. In Advances in Aerospace Guidance, Navigation and Control, Proceedings of the Selected Papers of the Fourth CEAS Specialist Conference on Guidance, Navigation and Control, Warsaw, Poland, 13–15 April 2017; Springer: Berlin/Heidelberg, Germany, 2018; pp. 443–454. [Google Scholar]
- Bruno, G.; Antonelli, D. Dynamic task classification and assignment for the management of human–robot collaborative teams in workcells. Int. J. Adv. Manuf. Technol. 2018, 98, 2415–2427. [Google Scholar] [CrossRef]
- Cesta, A.; Orlandini, A.; Umbrico, A. Fostering robust human–robot collaboration through AI task planning. Procedia CIRP 2018, 72, 1045–1050. [Google Scholar] [CrossRef]
- Cui, W.; Li, R.; Feng, Y.; Yang, Y. Distributed task allocation for a multi-UAV system with time window constraints. Drones 2022, 6, 226. [Google Scholar] [CrossRef]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm robotic behaviors and current applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef]
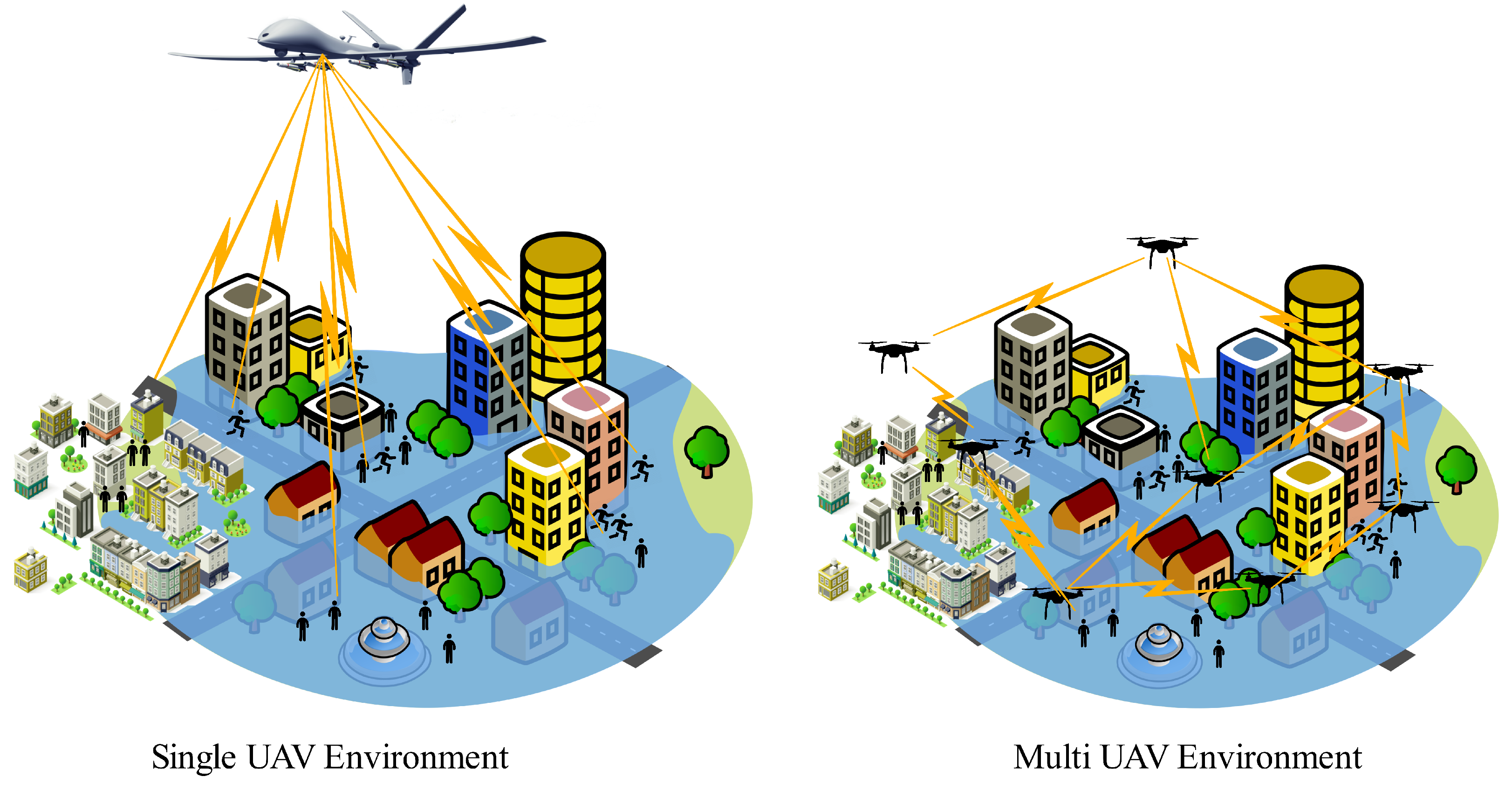
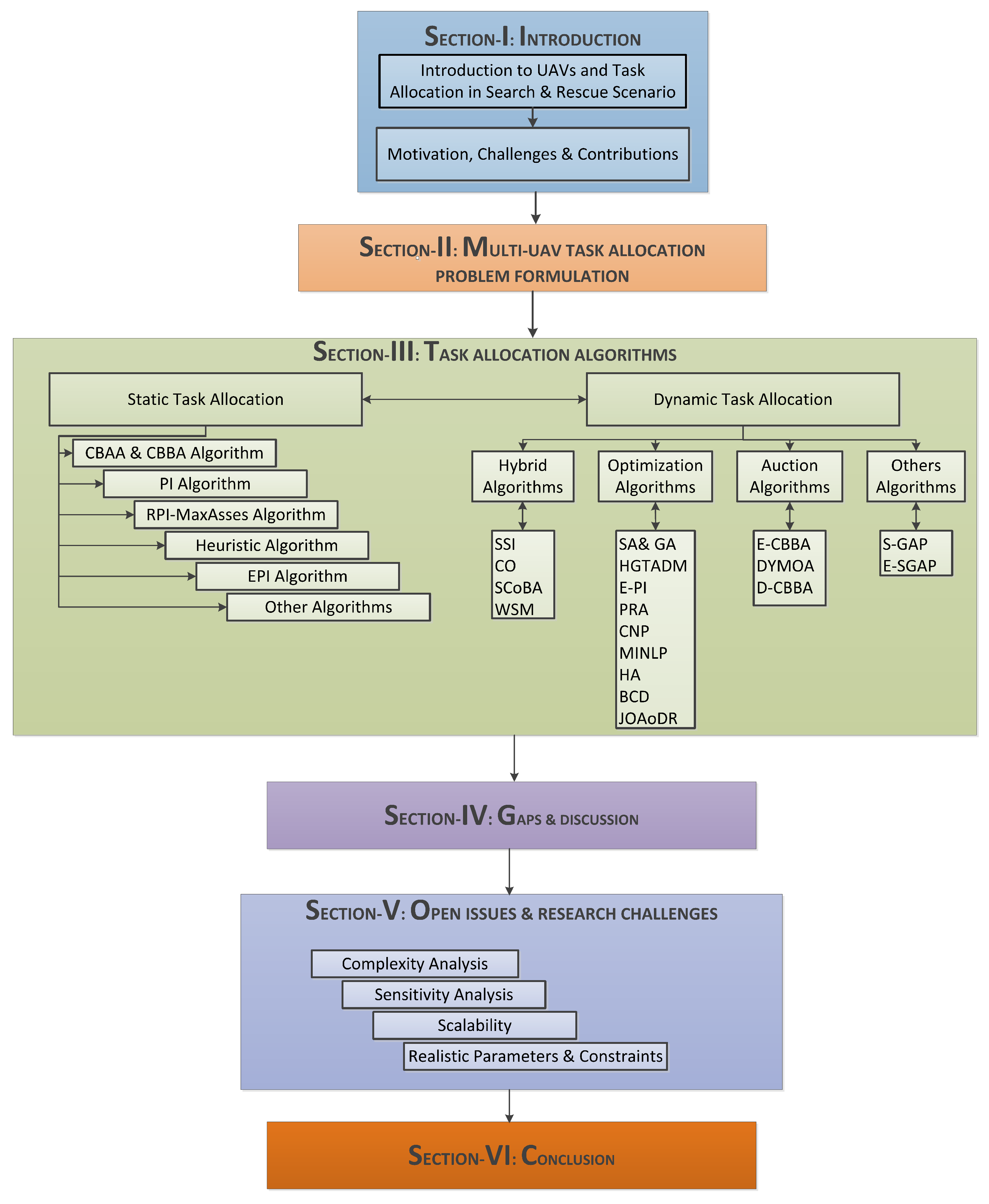
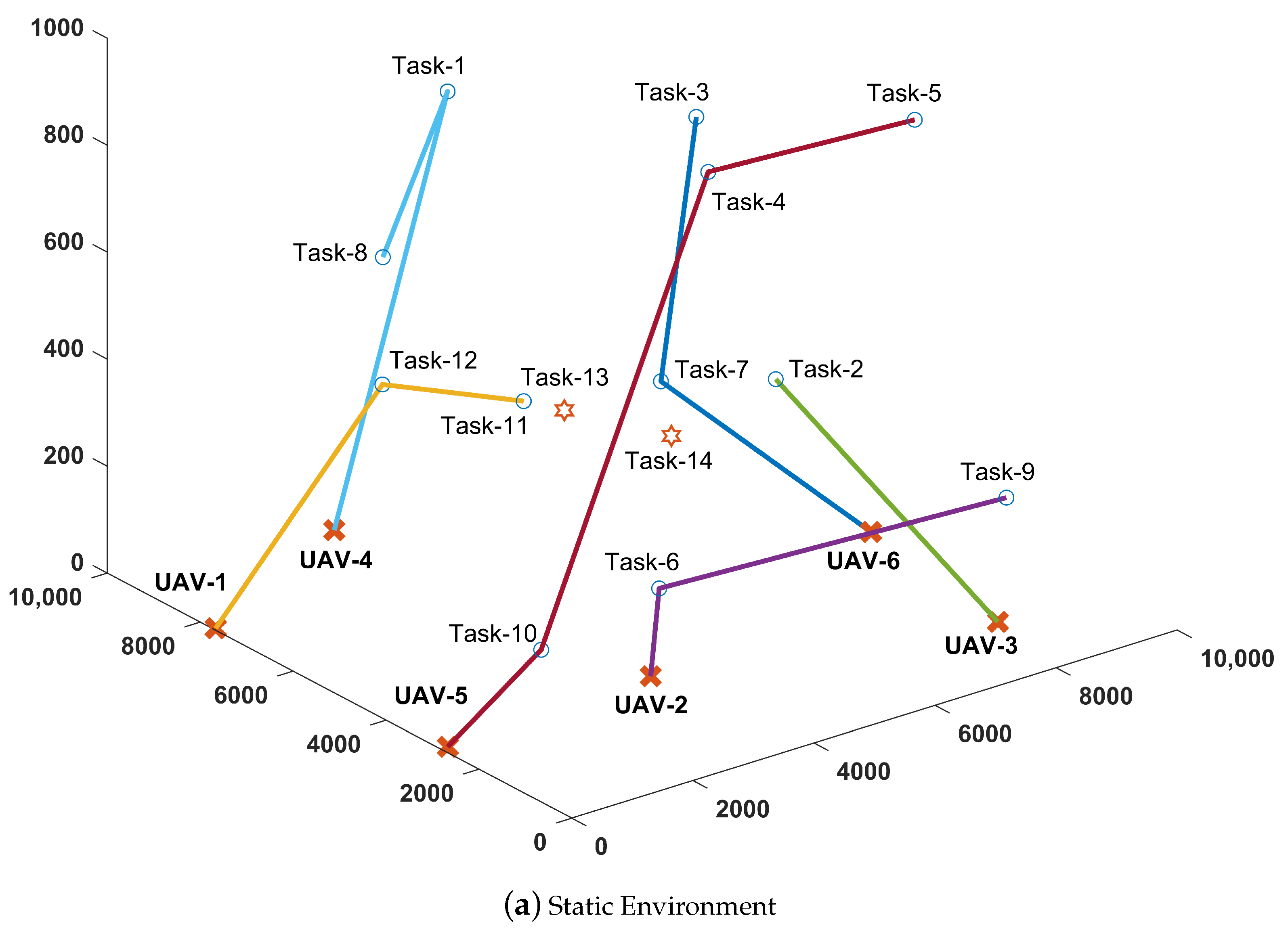
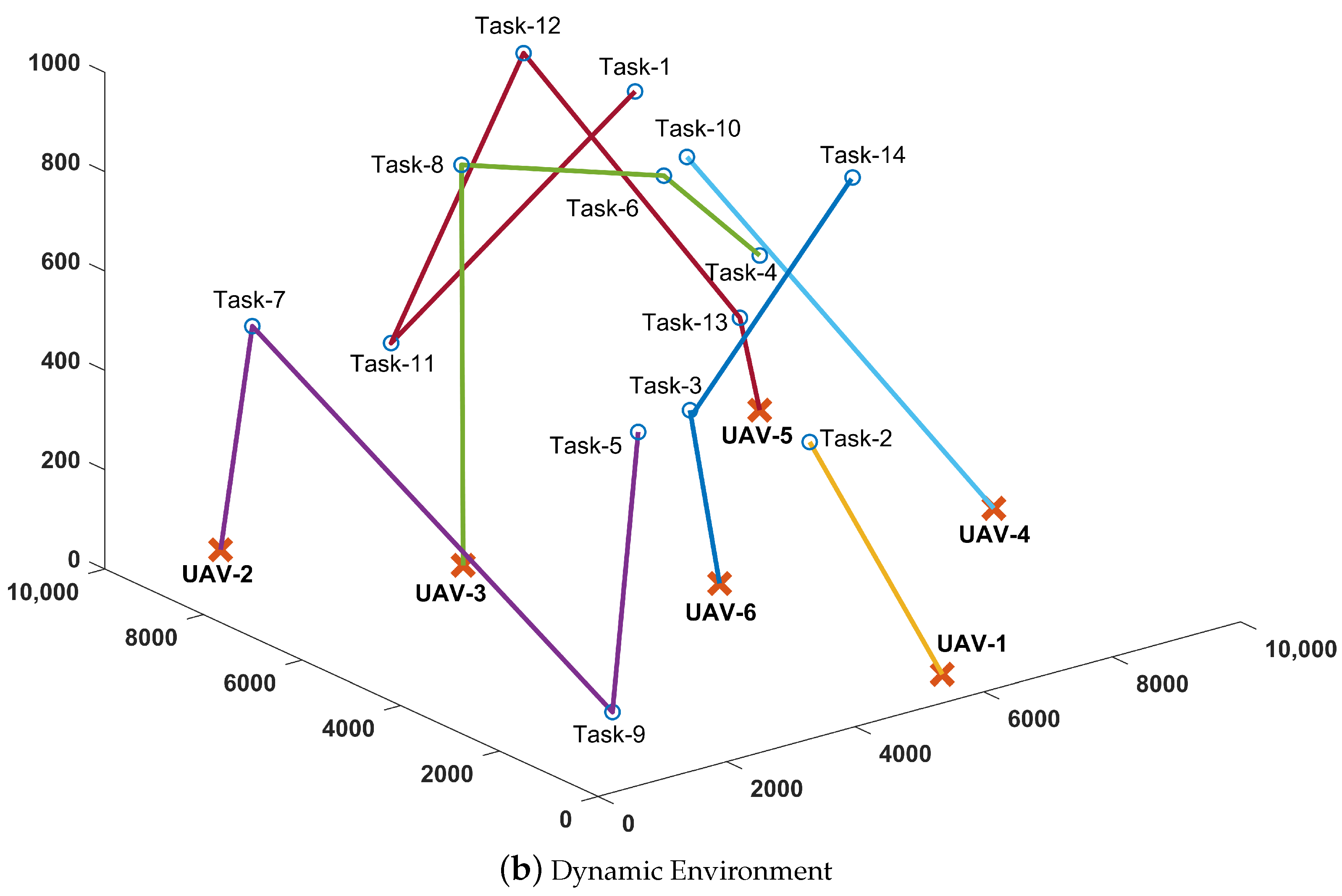
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).