1. Introduction
We are in the era of big raster data. Planet, formerly Planet Labs, has a constellation of over 200 satellites that collect 1.4 million images each day [
1]. Satellite imagery or earth observation data produces petabytes of data yearly, and organizations such as the Intergovernmental Panel on Climate Change (IPCC) produce simulated raster datasets that are multiple petabytes [
2].
The volume of data available for geospatial researchers are growing, yet we do not have a standardized set of tools and best practices for accessing, manipulating, and performing analyses on big geospatial data. Currently, researchers are developing novel ways to download data onto their workstations to perform their analyses. The reliance on this workflow reduces the ability to scale geospatial analyses on large datasets. However, it is necessary because geospatial data are different. Geospatial data values do not occur in isolation, and those values need to be considered in the context of their neighboring values. Our research examines if big data platforms that support geospatial data incur differential computational performance costs for preserving those relationships.
1.1. Big Geospatial Data
GIScience has co-opted new technology to support geospatial problem-solving. In particular, the rise of distributed platforms has facilitated parallel spatial computation. Generally speaking, there are three types of big data architectures currently supporting big geospatial data: parallel databases, No-SQL databases, and the family of Hadoop-based platforms which implement map-reduce either in memory (Spark) or to disk (Hadoop). Haynes [
3] provides a complete description of platform architectures that support raster data including PostgreSQL, SciDB, RasDaMan, Hadoop-GIS, SparkArray, and GeoTrellis.
While there are a number of platforms that support raster data, there is little evidence describing the capabilities and the performance of spatial analysis operators on big data platforms. This is problematic as there is a need for the GIScience community to be able to use these platforms to process big raster data. Theoretically, datasets that fit in-memory should perform well with in-memory platforms such as Apache Spark. However, recent papers have demonstrated that spatial and geospatial operations achieve optimal performance on different platforms [
4,
5]. The performance of raster operations has not been adequately addressed within the big data community. Instead, the literature surrounding big raster data platforms has three themes: (1) novel implementations, (2) domain-science implementations, and (3) meta-reviews.
1.2. Novel Implementations
Novel implementations are characterized by the extension of a new platform to support geospatial data and methods. Examples of this are Palamuttam [
6] and Wang [
7] who developed multi-dimensional array libraries for Apache Spark. Li and colleagues [
8] developed, FASTDB, a distributed array database. Other research groups have extended SciDB to support spatial analysis [
9,
10,
11]. These papers focus on specific problems, have small use cases, and are implemented on specific datasets. In comparison with a benchmark, their implementations are too specific and cannot be translated or adopted by the broader community.
1.3. Domain Science Implementations
Domain-science implementations focus on the development of a spatial workflow on a big data platform. This work fills a critical need in the literature as it demonstrates the general usability of the platform [
12,
13,
14,
15]. While these papers are widely helpful for understanding the capability of a particular platform, they are limited in their ability to compare workflows across platforms when compared with a benchmark.
1.4. Meta Reviews
Meta-reviews discuss the platforms and their capabilities [
16,
17,
18,
19,
20]. These papers are oriented towards the broadest communities and focus on the platform capabilities not platform performance. They describe the directions and trends that are on the horizon and indicate how their adoption can fulfill larger goals within the broader community. Yet these too are limited in when compared to a benchmark as they offer no results to compare different systems.
1.5. Need for a Geospatial Benchmark
A gap within the geospatial high-performance computing community is the lack of a raster benchmark, which allows for the evaluation of spatial operators across platforms. Ray and colleagues [
21] developed a benchmark “Jackpine” for vector data. Jackpine implemented nine spatial analysis operations and five topological relationships on three vector data types: point, lines, and polygons. Rabl and colleagues [
22] implemented benchmarking for array databases but only tested data loading and array subsetting operators. Therefore, a spatial benchmark that tests raster operators is needed. This benchmark will aid the geospatial community by providing publicly available reference datasets and methods that scholars could use for comparisons.
This research will work toward establishing a raster benchmark that provides a means to accurately compare the performance of raster spatial analysis on big data. Our benchmark examines the performance of local, focal, and zonal operations on each platform. While it is impossible to test every potential operation, our benchmark examines five operators that have broad use cases. In addition, the benchmark evaluates system performance with both volume and variety characteristics.
The geospatial benchmark will provide insights into the complexity of performing big data spatial analysis. The benchmark is needed to (1) identify operator performance issues, (2) determine if the underlying causes are related to the architecture or implementation, and (3) identify areas where research is needed.
2. Raster Big Data Benchmark
Benchmarks are defined as a dataset, a platform(s), and a series of operations. The definition of a raster benchmark is similar. First, we define the dataset by a consistent spatial extent. As there is no previous published literature on raster benchmarks, we employed multiple datasets with increasing spatial resolutions to determine the performance of each platform. We employed three different platforms in this analysis, and employed three of the major spatial operations used in raster analyses. We chose three big data platforms that are documented in the literature and utilize different architectures. The three platforms chosen are PostGIS on PostgreSQL, SciDB, and GeoTrellis on Apache Spark.
2.1. Data
We used three different datasets in our analysis (
Table 1). Each of these publicly available datasets was clipped to the spatial extent of the continental United States. Each dataset used in this analysis uses previously defined landuse/landcover classifications. They were chosen due to their widespread availability and use within geospatial applications. We chose three different datasets that represent increased levels of spatial granularity.
Table 1 reports the number of pixels that are present in each dataset.
Table 1 should be used by geospatial researchers as a guide to compare their project and determine the performance levels they should expect based on the platform that they have chosen.
To benchmark zonal operations, we also included three vector datasets of the continental United States. We used state, county, and census tract cartographic boundaries from the US (
Table 2). All datasets have the same spatial extent, and the only difference is the number of features present in the dataset. GeoTrellis does not read shapefiles, so the datasets were converted into Geographic JavaScript Object Notation (GeoJSON).
2.2. Spatial Partitioning
As with all big data platforms, partitioning the data is an important and necessary step. Data partitioning, in particular, is critical to big data platforms as it is one way to tune the platform to hardware and the data. In this research, we tuned the platforms by using a defined set of data partition sizes. The term tile size is used to designate the raster partitioning scheme. A tile size of 50 means that there are 2500 pixels (50 × 50) within a single partition of the data. Tile sizes were standardized across platforms for comparability of performance. Each platform was evaluated across a series of tile sizes that was optimal or suboptimal. Not all platforms were compared with all tile sizes, due to data loading issues.
2.3. Spatial Operations
Our analysis focuses on three classes of raster operations: local, focal, and zonal.
Table 3 provides a description of how each platform and its spatial operators are translated and performed on the given dataset. There are two types of evaluation: lazy and eager. Eager evaluation, which has historically been more common, is an operator that performs the analysis on the dataset. Newer platforms use lazy evaluation, which only operates on the data when the result of that operation is needed. However, this makes a comparison between platforms with different evaluations complex. Therefore, when a platform lazy evaluated, we included an additional step, Count Pixels, that forced the evaluation to complete. The eager method was used to ensure consistency across data platforms.
2.4. Local Operations
Local raster operations perform analyses on each cell individually without reference to the surrounding cells. This type of operation lends itself to parallelization because the dataset once partitioned can be operated on independently. In our benchmark, we used pixel count, reclassification, and raster add. While local operations act on a cell individually, they operate on the entire dataset.
2.4.1. Pixel Count
The pixel count operation returns the number of occurrences of a given pixel value within a raster. This function is the basis for any histogram-like function, in which the dataset must be traversed and information gathered regarding the cell values that have been defined. Identification of pixels by value is of particular importance for land cover change analyses. Additionally, we utilized this method because it allowed us a standardized method for forcing lazily evaluated operations to become eager across platforms.
In this application, each pixel value represents a land cover type, and the operation will return the number of times this value occurs. As the function must traverse the entire dataset, there is no performance gain or loss when a pixel value is frequent or rare within the dataset.
2.4.2. Reclassification
Reclassification identifies pixels of a given value and changes them to a new value specified by the user. Reclassification is a specific case of map algebra, in which a pixel value is evaluated and then replaced with a new value. There are two possibilities for reclassification operators in PostGIS (1) map algebra operator and (2) reclassification operator. We empirically compared the ST_Reclassify and ST_MapAlgebra operators and determined that ST_Reclassify is the faster operator. Both GeoTrellis and SciDB are agnostic about the difference between reclassification and map algebra. Our implementation of reclassification on GeoTrellis utilized the “local if” function. SciDB’s implementation of reclassification is an “if-then-else” statement. The pixel count operator was called post-reclassification for SciDB and GeoTrellis.
2.4.3. Raster Add
Raster add is a map algebra operation. It takes two rasters as inputs and adds the values of each cell and then returns a new raster. In our study, datasets were single band rasters, and we used the same dataset as the first and second raster. Raster add is lazily evaluated in GeoTrellis and SciDB, so the count pixel function was called to force evaluation. The raster add function tests the ability of each platform to join these large datasets and return a value.
2.5. Focal Operations
Focal functions differ from local functions in that the output values are influenced by the surrounding cells. A kernel or window is used to specify the size of the analysis or how many adjacent pixels are needed to determine the output value. Focal operations are predominantly used in computations that involve smoothing or interpolation. For example, removing vegetation pixels from a bare earth Digital Elevation Model [
23]. Additionally, focal operators are complex because if the dataset is distributed, the operator must locate adjacent tiles and pixels.
2.6. Zonal Operations
Zonal functions, specifically polygonal summaries, are a complex analysis as they involve both raster and vector datasets. Spatially irregular zones (i.e., Hawaiian islands) lead to increased complexity. Therefore, when a calculation is applied to a specific zone only a subset of the dataset must be processed. Ding and Desham [
24] define this problem as loosely-synchronous. For the benchmark, we tested the concept of polygonal summaries of raster datasets. Each vector dataset contained both polygons and multi-polygons at decreasing scales (e.g., states, counties, and tracts). The operators calculated the minimum, maximum, and average value within each zone.
3. Big Data Platform Comparison
3.1. Platform Descriptions
Much of the literature that develops improvements in big data platforms uses customization, such as the development of additional methods or tuning of the software to support specific hardware. Our approach differs in that we focus on the development of a geospatial benchmark for spatial analysis. Then we apply the benchmark to platforms and evaluate their ability to perform spatial analyses.
3.1.1. PostGIS 2.4 (PostgreSQL 9.6)
PostgreSQL is a relational database that has supported spatial data types since its initial release of PostGIS in 2001. The raster datatype was added as an official datatype of PostGIS in 2012. A raster dataset, once loaded into PostgreSQL, assumes a table representation consisting of two columns: RID and Raster. The RID column is a primary key and the raster column contains the binary pixel value data, which are stored in Binary Large Object (BLOB) and can only be accessed by using PostGIS raster functions.
3.1.2. SciDB 16.9
SciDB is an open-source multi-dimensional array database designed by Dr. Michael Stonebraker [
12,
25]. Its development was spurred by the concept that many scientific datasets have array-like structures, and there are costs to restructuring the datasets to persist as arrays within a relational database. SciDB’s platform uses arrays as the primary data structure and has been co-opted by the geospatial community [
11,
19,
26,
27]. SciDB’s massively parallel processing (shared-nothing parallel database) architecture allows it to process multi-dimensional arrays or geospatial imagery that are of multiple petabytes [
12,
25].
SciDB is not the only array database platform. RasDaMan, developed by Dr. Peter Bauman, is specifically designed to work with raster datasets [
28]. We chose SciDB because SciDB’s community edition can be extended to multiple instances or nodes, whereas only the enterprise version of RasDaMan supports this. Currently, SciDB does not have built-in capabilities for reading geo-referenced imagery. Community efforts to add geospatial functionality into SciDB have occurred, but nothing has been formally adopted [
9,
29].
3.1.3. GeoTrellis 1.2 (Apache Spark 2.1)
Apache Spark is an open-source high-performance distributed computing environment that began in 2009 in the UC Berkeley RDAD lab. Apache Spark is a component of the Hadoop ecosystem and has been shown in some operations to be 20× faster than Hadoop [
30]. This improved performance is due to Apache Spark holding data in memory and conducting operations in memory instead of writing to disk as Hadoop does.
There is a growing literature examining multi-dimensional arrays on Apache Spark. Wang and colleagues [
7] implemented a new array datatype, SparkArray, to load and process raster data. Doan and colleagues [
17] compared the performance of loading and subsetting operations between SciDB and Apache Spark. The GeoTrellis library is one of the first libraries to go beyond simple array datatypes, as it has been developed for processing, visualization, and analysis of geospatial data.
GeoTrellis began as a research project of Azavea in 2006; however, in 2013, the GeoTrellis project became a member of the Eclipse Foundation, and was redeveloped in Scala and using Apache Spark as its distribution and processing engine. The GeoTrellis library implements Paired Resilient Distributed Datasets (RDD) for spatial datasets, in which each Paired RDD is represented as a key and value pair. The key refers to a specific geographic location of the raster tile and the value is a multi-dimensional matrix.
3.2. Hardware
We use the Extreme Science and Engineering Discovery Environment (XSEDE) cyberinfrastructure to provide computation resources for our computation environment [
31]. XSEDE is a National Science Foundation investment that allows for requests of high-performance computation allocations. Supercomputer Wrangler fulfilled our request at the University of Indiana, which allocated three compute nodes and installed our software (TG-SES160012).
Each node was a Dell PowerEdge R630, equipped with two Intel(R) Xeon(R) CPU E5-2680 v3 @ 2.50 GHz processors, with 12 cores for each Xeon. Additionally, each node has 128 Gigabytes of 2133 MHz DDR4 RAM. While each node had 24 cores, all performance times utilized 12 cores for SciDB and Apache Spark. PostgreSQL at this time has a one to one relationship between queries and cores. All platforms utilized a Lustre backend for large data storage. The Lustre version was Lustre 2.5.5, and the Lustre client was 2.10.3. There was a small discrepancy in operating systems, as SciDB 16.9 at the time of this was not properly configured to run CentOS 7. Therefore, SciDB was built on CentOS 6 OS, while both Apache Spark and PostgreSQL were configured to run in a CentOS7 environment.
4. Results
The results are a selection of the analyses we performed for demonstrating our benchmarking. The results depict broad characterizations that users should expect when performing spatial operations on the platforms.
In order to effectively assess the effect of tuning into the results, each operator performed on the entire dataset with various tile sizes. By varying the tile size at regularly defined intervals, we can determine when the optimal performance of a particular platform occurs on a particular dataset. The full range of tile sizes was not applied across each platform due to marginal changes in performance and data loading issues. However, we identified a selection of tile sizes that allow for fair comparison across platforms and characterize optimal performances of raster analyses on big data platforms.
We report the averaged time, which was determined from three consecutive tests. PostGIS was used as a baseline for comparison. Therefore, speed-up was determined by taking the best performing time for PostGIS and comparing it with the best performance time for SciDB and GeoTrellis. The best performance time was used as this represents the optimally tuned performance for each platform for each dataset. Since all queries for PostGIS are single-core, speed-up per-core was determined by dividing speed-up by the number of processors or instances used. For all analyses, this value was 12.
4.1. Local Operations
4.1.1. Pixel Count
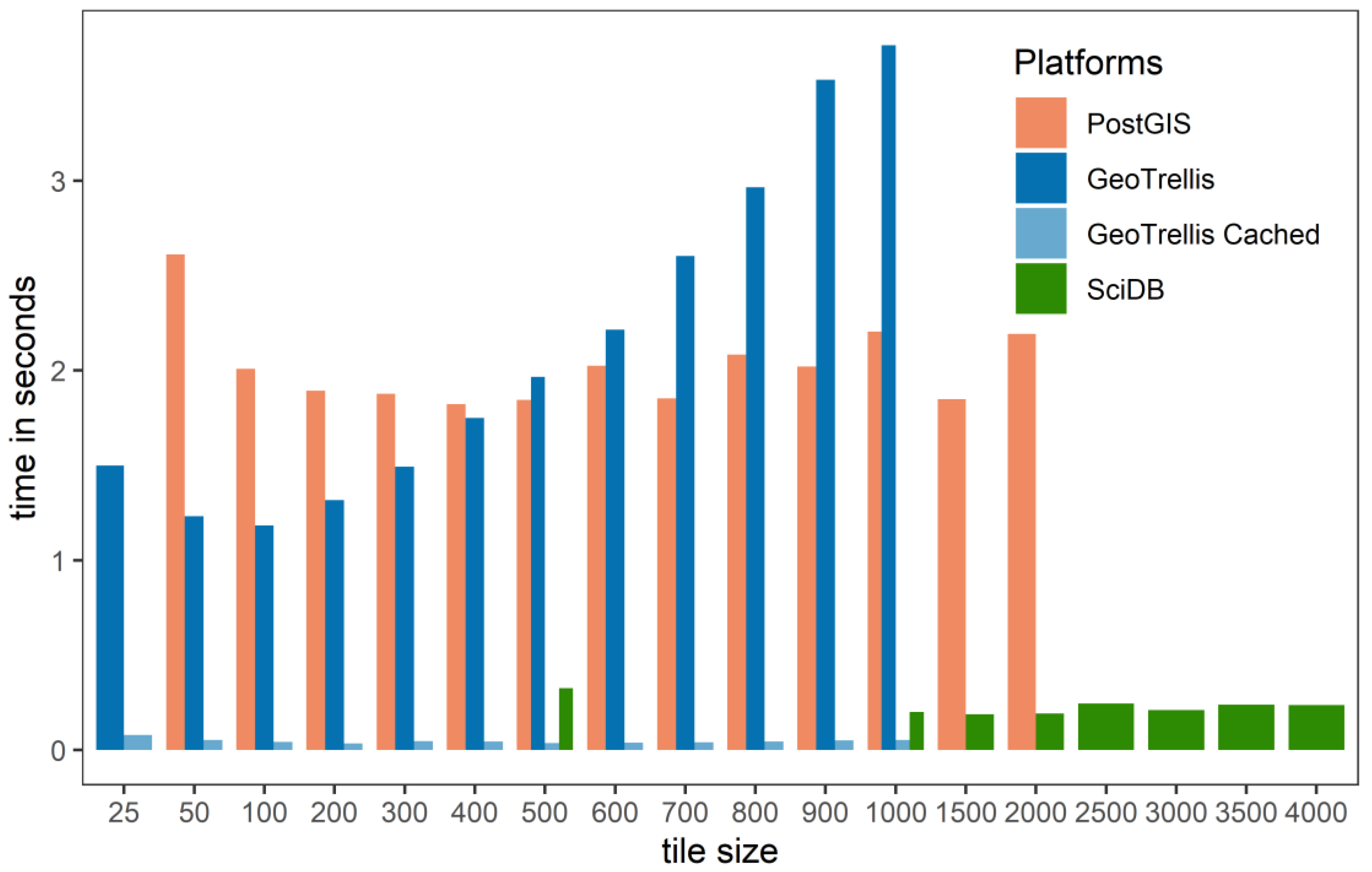
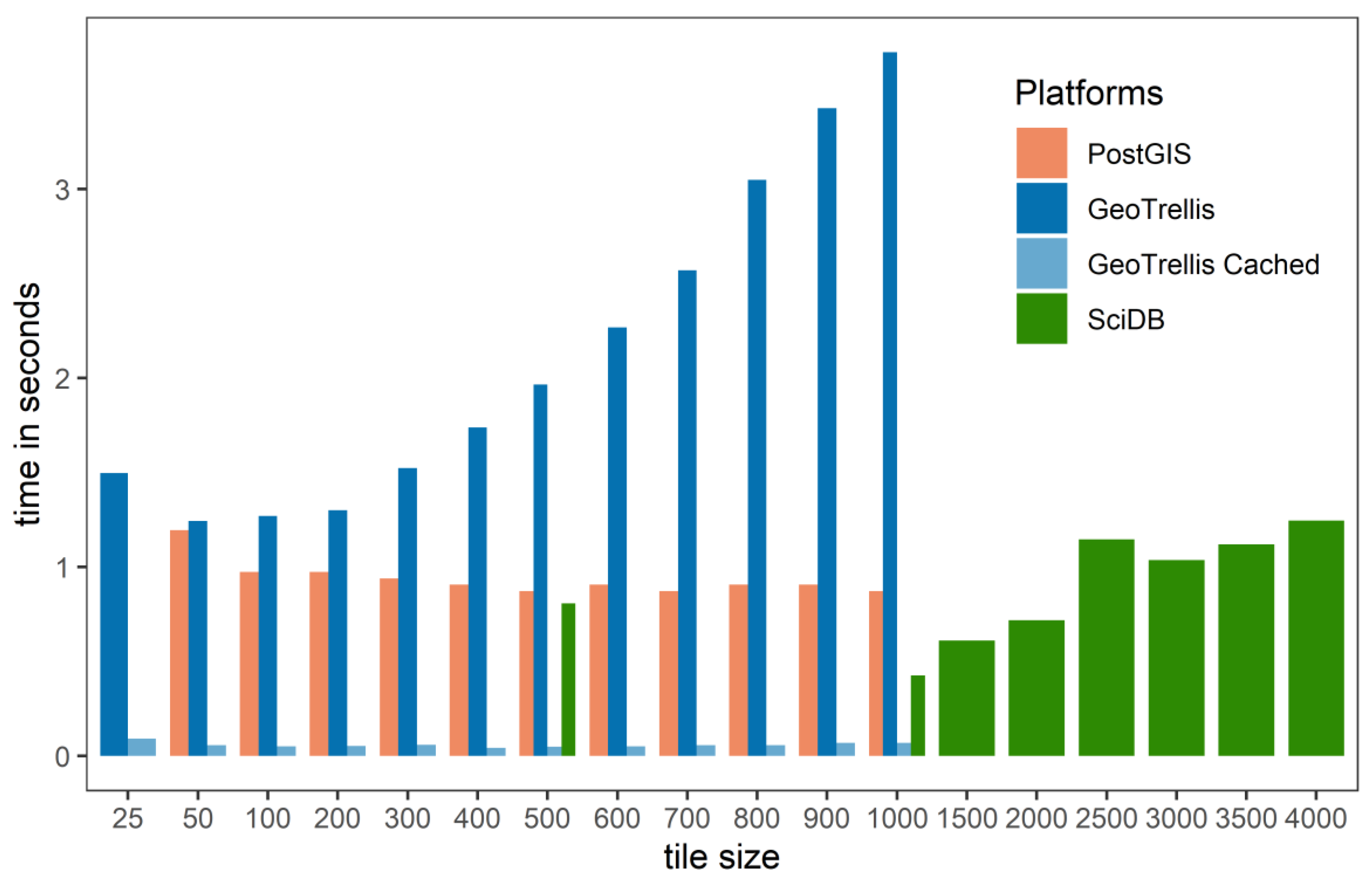
Figure 1 reports a common issue when analyzing raster data on various platforms without a sensitivity test. Raster tile tuning is specific to the platform.
Figure 1 shows that the tile size that works well on one platform should not be applied to another platform as it will result in suboptimal performance. For example, in
Figure 1, a tile size of 1000 (1,000,000 pixels per tile) depicts some of the worst performance times for PostGIS and GeoTrellis, whereas for SciDB, the performance is quite good. As tile sizes decrease, both PostGIS and GeoTrellis performances improve, whereas SciDB’s performance degrades.
The results of the pixel count operator are further shown in
Table 4.
Table 4 depicts the results from the smallest and largest datasets (i.e., GLC and NLCD)—full results reported in
Supplementary Materials Table S1. The results in
Table 4 indicate that the dataset GLC (18 million pixels) is not big data. For big data platforms such as GeoTrellis or SciDB, this is a small dataset, and there are minimal performance gains. However, as the volume of data increased, there were notable performance gains with big data platforms (
Table 4).
Table 5 reports that speed-up per-core (2.49) was first achieved by SciDB on the Meris dataset (186 million pixels). SciDB’s per-core improvement increased up to 5.7 times per core. The best GeoTrellis performances occurred with the Cached reads, in which the data were read once and cached in memory.
4.1.2. Reclassification
The results of the reclassification operator differ sharply from the pixel count operator. PostGIS’s reclassification function worked very efficiently and allowed it to outperform the big data platforms (
Figure 2). PostGIS reported faster performance times than GeoTrellis and SciDB on the GLC dataset.
Table 6 shows that only minimal speed-up per-core performance gains occurred when using big data platforms. When examining the two smaller datasets (GLC and MERIS), GeoTrellis’ compute time was slower than PostGIS, meaning the platform was penalized for using small data (
Table 6). Speed-up occurred with big data platforms with the largest dataset NLCD. However, we report no per-core speed-up improvements for the reclassification operator.
4.1.3. Raster Add
Table 7 describes the performance of the raster add function across all three platforms. The results of the raster add function are similar to the results in pixel count. The big data platforms had a tremendous performance advantage over PostGIS.
Table 7 depicts that PostgreSQL’s best performance occurred when the tile sizes were largest. As tile size increased, performance increased, yet PostGIS was unable to ever successfully join the NLCD dataset at any tile size. The operation ran for over 24 hours without ever finishing. Both SciDB and GeoTrellis were able to join all raster datasets, and we found variation in join performance between the platforms.
4.2. Focal Analyses
PostGIS performed well on the small and medium datasets (GLC and MERIS). However, it was unable to finish computations on the NLCD dataset (1.69 billion) pixels for any tile size (
Table 8). For focal operations, the best performance occurred when the tile size was smallest at 50, as the tile size grew so did the time to complete the query.
SciDB’s performance on focal operations was challenging, and we provide full performance values (
Supplementary Materials Table S2). The irregular performance times occurred on large dense datasets with tile sizes greater than 1500 × 1500 pixels. Performance times of the overlapped array using the focal operator were two times faster than the standard array. This decrease in performance is due to SciDB’s query planner detecting that the array is not structured for parallel implementation and initiating a redimensioning step, which is computationally expensive.
GeoTrellis’ performance for focal operations is superior to SciDB and PostgreSQL. The performance improvements were evident with small and large datasets. For example, GeoTrellis achieved a 7× speed-up per-core on the smallest dataset GLC. GeoTrellis’ performance continued to improve as it reached 9× speed-up per-core on Meris and finished NLCD. While the performance gains of GeoTrellis over SciDB are not as large, the ease and overall performance make GeoTrellis the superior platform.
4.3. Zonal Analyses
Unlike the other operations, PostGIS provided the best overall performance on zonal operations across datasets (
Table 9). The full results of zonal operations are reported (
Supplementary Materials Table S3). PostGIS’s superior performance relies on built-in operations that support both vector and raster data types. PostGIS’ rasterization process is serial but performs very efficiently. Additionally, the function employed for conducting zonal statistics with PostGIS, ST_SummaryStatsAgg, is an aggregate function, meaning it operates on each geographic feature and raster tile independently. A major item of concern is the “U” shape performance curve that PostGIS creates [
19]. We found that these trends were consistent across all datasets. The optimal performance tile size varied as the number of features increased and the geographic extent of the features decreased.
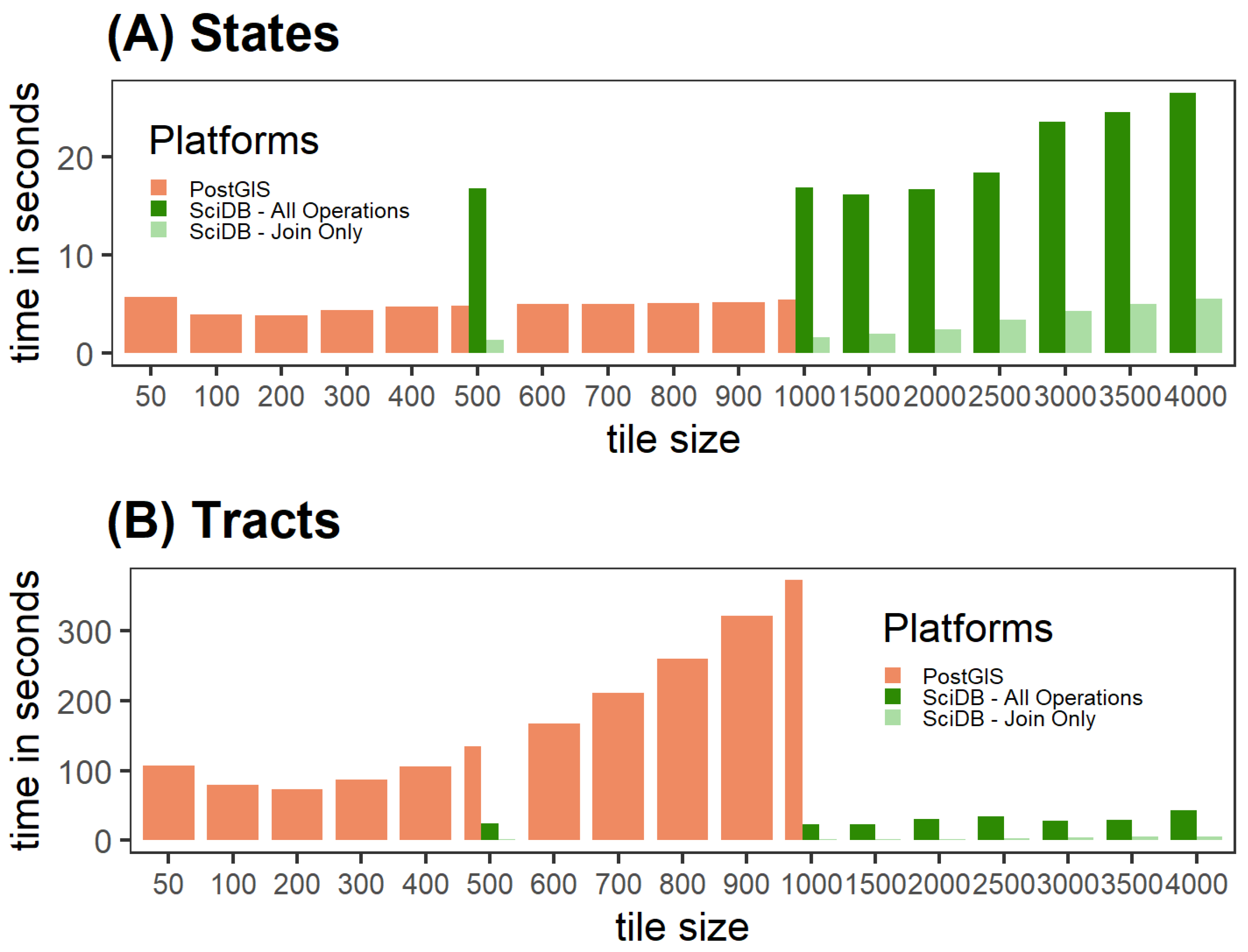
The performance results for SciDB are mixed.
Figure 3 shows the evidence that SciDB is potentially a good platform for performing zonal statistics.
Figure 3A depicts the performance between SciDB and PostgreSQL on the state dataset, in which the PostgreSQL easily outperformed SciDB—All Operations. However,
Figure 3B shows that as the number of features increased SciDB became the superior platform. Unlike PostGIS or GeoTrellis, with SciDB, there was relatively little change in performance as chunk size increased.
Figure 3 reports results for SciDB that are both “Join-Only” and “All-Operations.” The join-only performance times assume that the masking process has already been performed. This is an unlikely assumption, and full-time results are in
Supplementary Materials Table S4.
The results of GeoTrellis are surprising (
Table 10). GeoTrellis 1.2 does not have an operator that would allow it to take a collection of geometries and perform the analysis across all features. Therefore, the operation was serial, which resulted in poor performance.
Table 10 depicts that better performance occurred with larger tiles.
5. Discussion
5.1. Local Operators
Overall, big data platforms are superior when conducting local operations. The big data platforms specialize in partitioning large datasets and analyzing them in parallel. The data structures and architectures employed by both platforms are likely to perform well on big raster data. SciDB’s array-store architecture in many cases outperformed GeoTrellis and PostGIS at fetching and processing data quickly. In particular, the results of the pixel count operation depict the computational advantages of using a big data platform. However, we also report that optimized functions instead of generalized functions can improve performance.
The results of the benchmark for the raster add operation were striking. In comparison to all the other local operations, the raster add operation depicts the most substantial performance gains when using a big data platform such as SciDB or GeoTrellis. PostGIS cannot process the join between these two large raster datasets (i.e., NLCD).
Table 7 reports interesting results when comparing the performance between SciDB and GeoTrellis. Initially, SciDB performed the best on the GLC and Meris datasets with 18 million and 186 million pixels, respectively. SciDB’s best performances were about twice as fast as GeoTrellis for each dataset. However, GeoTrellis’ performance was superior on the NLCD dataset with 1.69 billion pixels. GeoTrellis’ best performance of 171 seconds was twice as fast as SciDB’s at 359 seconds.
The reason we observe the changes in the performance of these platforms lies in the architecture of the platforms. The observed differences are related to load balancing, defined as the ratio of SciDB instances to data partitions available. For example, if we have 12 SciDB instances and 24 chunks and the operation takes 10 s to complete for a chunk, it will take SciDB 20 seconds to finish this operation with 24 chunks and 12 instances. If we have the same dataset partitioned into 26 chunks, it will take SciDB 30 s.
The approach used for the Apache Spark framework is different because the platform is agnostic to the ratio of cores to the number of data partitions because the data are all in memory. The Apache Spark application defines the number of cores available and assigns data to available cores. Our results show that while SciDB suffered from an imperfect load balance on all datasets, its ability to fetch the data was superior and allowed it to outperform GeoTrellis on smaller datasets. However, when there was a load imbalance, Apache Spark’s framework performed better because it could avoid load balance issues.
5.2. Focal Operators
Creating comparable methods for the focal analyses was complex, but our results indicate that there are apparent differences in the platforms.
Focal operations should be avoided when using PostGIS as it provides unsatisfactory results—due to the resulting dataset from PostGIS not being equivalent to the resulting dataset from SciDB or GeoTrellis. The PostGIS focal operator is not an aggregate. Instead, it operates on each tile independently. Any focal operation must be combined with PostGIS’s MapAlgebra function. Therefore, pixels that are located on the edge of a tile will not have their focal value determined by cells adjacent to it in the next tile. This has potentially serious implications for large datasets such as NLCD when it has many small tiles. The alternative is to use the ST_Union operator to merge all of the tiles and then perform the focal operator. Merging tiles is unlikely to be unsuccessful as a raster dataset size can exceed the PostgreSQL row memory limit. Haynes indicates that the ST_Union operator is computationally intensive and degrades query performance [
19].
SciDB also presented some unexpected challenges. Overlapped arrays are not a unique class of arrays; they are an additional specification of the array schema. A SciDB array can be defined with an overlap in any dimension [
25]. The overlap allows each SciDB array to have data from adjacent tiles. An array with a defined overlap value will now be able to conduct a focal operation in parallel.
Wide-ranging performances were encountered when using the focal operator, highlighting architectural issues using large tile sizes (i.e., greater than 1500 × 1500 pixels) on big arrays. The window operator, for SciDB, works on tiles sequentially and stores them in memory. This process exhausted the 128 Gigabyte memory on the node. Queries that used tiles sizes of 2000 or greater caused the query to hang, even if completed, and sometimes resulted in SciDB needing to be rebooted.
While both big data platforms are better alternatives to PostGIS, GeoTrellis is the best performer. When a focal operation is initiated, GeoTrellis is aware of the spatial arrangement for every tile of the dataset. It then collects all edge pixels that are necessary for each tile and shuffles them to the neighboring tiles, making the focal operation parallel.
Another implementation advantage of GeoTrellis over SciDB is that it currently caches at the tile level. The first time the focal operation is initiated on a tile, GeoTrellis knows very little information about its adjacent pixels. Therefore, it must gather information about the adjacent pixels. When the operator moves to an adjacent pixel, it already has information about ⅓ of the adjacent pixels from the previous query. GeoTrellis’ implementation allows it, through caching, to reuse data that it has already read, speeding up the operation. Currently, on SciDB, the focal operator does not cache. Researchers have written additional operators for SciDB that improved the performance of the focal operations by implementing caching [
10]. Testing this code was beyond the extent of our research.
5.3. Zonal Operators
Creating comparable methods for the zonal analyses was the most complex as it involved two different datasets vector and raster. Both PostGIS and GeoTrellis natively support vector data types. However, SciDB does not, which is problematic for performing zonal operations.
Zonal operators are an area in which both big data platforms struggled in comparison to PostGIS. Polygonal summaries are an area in which research is needed for big data platforms. One potential reason is that polygonal summary or zonal statistics tend to be viewed as a single operation, when in fact there is a series of steps.
Rasterize the vector dataset to the same geographic extent as the raster dataset;
Spatially join the masked raster and original raster dataset;
Conduct an aggregation (i.e., min, max, sum, mean) between the two joined datasets.
Within each platform, polygonal summarization works differently. For PostGIS, the polygonal summarization process is serial. It takes each polygon and intersects it with spatially aligned tiles. It then rasterizes and joins the two datasets together and returns the requested statistics.
The primary issue for SciDB is the lack of support for the vector dataset, which then requires an external process for creating and loading a masked dataset. Rasterization creates a bottleneck for SciDB, as it creates a second dataset that must be loaded into the platform. Implementation of scanline operations or parallel scanline operations could be extended to SciDB [
32,
33].
GeoTrellis avoids rasterization and uses a scan-line algorithm to identify the pixels of interest it then creates and returns a new RDD. However, solving the polygonal summary issue for GeoTrellis (Apache Spark) is complex. Zonal Statistics utilizes heterogeneous datasets, which causes issues for Apache Spark. Its typical way of handling this is to shuffle the data. However, the amount of shuffling implemented during zonal analysis is of great concern. Shuffling is necessary because Apache Spark does not join or merge heterogeneous datasets.
For example, take a raster dataset with many tiles and scatter them across a series of nodes and then do the same with a vector dataset with many features. The resulting analysis incurs greater computational penalties when shuffling the data. The results in
Table 10 support this. The performance increases when using a dataset with few features such as states compared to a dataset with many features such as census tracts. GeoTrellis spends much of its time shuffling data around so that it can match the vector and raster datasets together. GeoTrellis’ performance improves when there are fewer raster tiles and fewer vector features.
Yang [
34] discusses a potential solution called Map-Reduce-Merge, which is designed to handle heterogeneous datasets. The implementation of such a feature for geospatial analysis is not without challenges as Apache Spark works best with small partitions. Currently, GeoTrellis partitions at the polygon level; this is problematic because polygons can span multiple tiles. To make the data more homogenous, a vector-specific partition needs to be implemented. Partitioning will need to be implemented at two levels. The first level of partitioning is at the polygon, and the second level of partitioning would be such that it breaks polygons into fragments that align with the raster partitioning structure. Afrati and Ullman [
35] build upon this work discussing a similar strategy, map-reduce-join. The map-reduce-join strategy allows for the joining of heterogeneous datasets based upon star join. In which the smaller dataset (vector) is replicated to all potential matching tiles, and then joins are performed. GeoSpark implements a similar partitioning strategy when joining vector datasets in Apache Spark [
36].
6. Conclusions
This research developed the first raster benchmark that can be used for comprehensively comparing raster analysis on big data platforms. It provided a broad overview of a selected group of big data platforms and applied them to three classes of spatial operators. The development of the geospatial benchmark for raster operations is necessary and will aid the development of big raster data platforms. The benchmark is a critical component of the spatial infrastructure and the big spatial community and will provide the geospatial community with a reference tool for evaluating big raster platforms. The utility of the benchmark is demonstrated in the application of the benchmark to three existing big data platforms and their potential application to processing big geospatial data.
Table 11 reports an overall assessment of platform performance on big spatial operations. Both of the big data platforms, SciDB and GeoTrellis, exhibited superior performance methods on the local operations. In particular, map algebra operations are an area where these platforms demonstrate their superior performance, as PostGIS was unable to finish the computation for the raster add operator as the data volume grew. GeoTrellis was also the superior platform when performing focal operations. GeoTrellis implements various levels of caching that result in good performances on datasets of all sizes. Additionally, both big data platforms have the ability to restructure the data into a parallel format on demand. Lastly, big data platforms need additional development work to support zonal operations. Both SciDB and GeoTrellis produced subpar performances for zonal operations. Of the two platforms, SciDB’s performances were the same or similar to PostGIS on the medium and small datasets. SciDB’s major bottleneck is the need to rasterize and load the external dataset, which is problematic for large datasets. SciDB is a moderate performer for Zonal analysis, because pre-processing steps are commonly used in big data operations. While GeoTrellis implements methods to avoid rasterization, the current architecture’s inability to match heterogeneous datasets without lots of shuffling limits the platform’s use on zonal operations that contain a large number of vector features or have a small tile size.
Table 11 highlights a second significant issue; none of the platforms we analyzed were successful at all of the three classes of raster operations. GeoTrellis was the top performer in two of the three categories, making it an ideal platform for developing spatial workflows.
6.1. Limitations
While in this study, we attempted to be very thorough and robust in our analysis, there are limitations to this research. The first limitation is that we did not examine every big data platform that currently analyses raster data. We examined a selection of platforms that are documented in the literature and utilized different big data architectures: relational databases, No-SQL array databases, and Apache Spark (in-memory Hadoop). Due to data loading issues, not all systems were compared at every tile size. This limits the ability to make direct comparisons; however, all platforms were compared on 500 and 1000 tile sizes. A second and related limitation is that new versions of the software will change the performance of these platforms. This is true; however, again, we reference the architectural limitations that we identified. Unless there are major changes to the architecture, many of these problems will still exist.
6.2. Future Work
This research addresses a significant gap in the literature through the development of a raster benchmark that can be used to evaluate spatial analysis on big data platforms. Research should progress in several directions. First, we propose to develop a complementary benchmark for vector datasets. Many platforms provide spatial analysis operators for vector spatial data, and this benchmark should be extended to encompass the two major spatial data types. Secondly, work comparing the platforms should be extended into different computation environments. Our work examined a large memory single node high-performance environment, but results could differ substantially in a distributed computing environment. Lastly, the evaluation benchmark should be updated with more platforms, new versions of the existing platforms, larger multi-spectral datasets, and the integration of spatial workflows. The development of such an ambitious geospatial benchmark would be beneficial to the entire geospatial community as it would provide clear guidance and identify bottlenecks and successes for high-performance geospatial computing.
Supplementary Materials
The following are available online at
https://www.mdpi.com/2220-9964/9/11/690/s1, Table S1: Pixel Count Performance Times on all Platforms all Datasets; Table S2: Focal Performance Times on all Platforms all Datasets; Table S3: Polygonal Summaries on all Platforms for all Datasets; Table S4: SciDB Zonal Operation Components by Percentage of Time.
Author Contributions
Conceptualization, David Haynes and Eric Shook; Formal analysis, David Haynes and Eric Shook; Investigation, David Haynes; Methodology, David Haynes and Philip Mitchell; Software, David Haynes and Philip Mitchell; Writing—original draft, David Haynes, Philip Mitchell and Eric Shook; Writing—review and editing, David Haynes, Philip Mitchell and Eric Shook. All authors have read and agreed to the published version of the manuscript.
Funding
Research reported in this publication was supported by the National Cancer Institute of the National Institutes of Health under Award Number T32CA163184 (Michele Allen, MD, MS; PI). The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Boshuizen, C.; Mason, J.; Klupar, P.; Spanhake, S. Results from the planet labs flock constellation. 2014. [Google Scholar]
- Yang, C.; Huang, Q.; Li, Z.; Liu, K.; Hu, F. Big Data and cloud computing: Innovation opportunities and challenges. Int. J. Digit. Earth 2017, 10, 13–53. [Google Scholar] [CrossRef]
- Haynes, D. Array Databases. Geographic Information Science Technologies Body of Knowledge. 2019. Available online: https://gistbok.ucgis.org/bok-topics/array-databases (accessed on 19 November 2020).
- Ding, M.; Yang, M.; Chen, S. Storing and Querying Large-Scale Spatio-Temporal Graphs with High-Throughput Edge Insertions. arXiv 2019, arXiv:1904.09610. [Google Scholar]
- Arnold, J.; Glavic, B.; Raicu, I. A High-Performance Distributed Relational Database System for Scalable OLAP Processing. In Proceedings of the 2019 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Rio de Janeiro, Brazil, 20–24 May 2019; pp. 738–748. [Google Scholar] [CrossRef]
- Palamuttam, R.; Mogrovejo, R.M.; Mattmann, C.; Wilson, B.; Whitehall, K.; Verma, R.; McGibbney, L.; Ramirez, P. SciSpark: Applying in-memory distributed computing to weather event detection and tracking. In Proceedings of the 2015 IEEE International Conference on Big Data (Big Data), Santa Clara, CA, USA, 29 October–1 November 2015; pp. 2020–2026. [Google Scholar] [CrossRef]
- Wang, W.; Liu, T.; Tang, D.; Liu, H.; Li, W.; Lee, R. SparkArray: An Array-Based Scientific Data Management System Built on Apache Spark. In Proceedings of the 2016 IEEE International Conference on Networking, Architecture and Storage (NAS), Long Beach, CA, USA, 8–10 August 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Li, H.; Qiu, N.; Chen, M.; Li, H.; Dai, Z.; Zhu, M.; Huang, M. FASTDB: An Array Database System for Efficient Storing and Analyzing Massive Scientific Data. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Zhangjiajie, China, 18–20 November 2015; Wang, G., Zomaya, A., Martinez, G., Li, K., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 606–616. [Google Scholar]
- Appel, M.; Lahn, F.; Pebesma, E.; Buytaert, W.; Moulds, S. Scalable earth-observation analytics for geoscientists: Spacetime extensions to the array database SciDB. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 17–22 April 2016; Volume 18, p. 11780. [Google Scholar]
- Jiang, L.; Kawashima, H.; Tatebe, O. Fast window aggregate on array database by recursive incremental computation. In Proceedings of the 2016 IEEE 12th International Conference on e-Science (e-Science), Baltimore, MD, USA, 23–27 October 2016; pp. 101–110. [Google Scholar]
- Lu, M.; Appel, M.; Pebesma, E.J. Multidimensional Arrays for Analysing Geoscientific Data. ISPRS Int. J. Geo-Information 2018, 7, 313. [Google Scholar] [CrossRef]
- Planthaber, G.; Stonebraker, M.; Frew, J. EarthDB: Scalable analysis of MODIS data using SciDB. In Proceedings of the 1st ACM SIGSPATIAL International Workshop on Analytics for Big Geospatial Data, Redondo Beach, CA, USA, 6–9 November 2012; pp. 11–19. [Google Scholar]
- Karmas, A.; Karantzalos, K.; Athanasiou, S. Online analysis of remote sensing data for agricultural applications. In Proceedings of the OSGeo’s European Conference on Free and Open Source Software for Geospatial, Bremen, Germany, 15 July 2014. [Google Scholar]
- Picoli, M.C.A.; Câmara, G.; Sanches, I.D.; Simões, R.E.O.; De Carvalho, A.X.Y.; Maciel, A.; Coutinho, A.; Esquerdo, J.; Antunes, J.F.G.; Begotti, R.A.; et al. Big earth observation time series analysis for monitoring Brazilian agriculture. ISPRS J. Photogramm. Remote Sens. 2018, 145, 328–339. [Google Scholar] [CrossRef]
- Sidhu, N.; Pebesma, E.; Câmara, G. Using Google Earth Engine to detect land cover change: Singapore as a use case. Eur. J. Remote. Sens. 2018, 51, 486–500. [Google Scholar] [CrossRef]
- Eldawy, A.; Mokbel, M.F. The era of big spatial data. In Proceedings of the 2015 31st IEEE International Conference on Data Engineering Workshops, Pittsburgh, PA, USA, 15–18 June 2015; pp. 42–49. [Google Scholar]
- Doan, K.; Oloso, A.O.; Kuo, K.-S.; Clune, T.L.; Yu, H.; Nelson, B.; Zhang, J. Evaluating the impact of data placement to spark and SciDB with an Earth Science use case. In Proceedings of the 2016 IEEE International Conference on Big Data (Big Data), Washington, DC, USA, 5–8 December 2016; pp. 341–346. [Google Scholar]
- Olasz, A.; Thai, B.N.; Kristóf, D. A New Initiative for Tiling, Stitching and Processing Geospatial Big Dat in Distributed Computing Environments. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 111. [Google Scholar]
- Haynes, D.; Manson, S.M.; Shook, E.; Manson, S. Terra Populus’ Architecture for Integrated Big Geospatial Services. Trans. GIS 2017, 21, 546–559. [Google Scholar] [CrossRef] [PubMed]
- Wiener, P.; Simko, V.; Nimis, J. Taming the Evolution of Big Data and its Technologies in BigGIS A Conceptual Architectural Framework for Spatio-Temporal Analytics at Scale. In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management, Porto, Portugal, 27–28 April 2017; pp. 90–101. [Google Scholar]
- Ray, S.; Simion, B.; Brown, A.D. Jackpine: A benchmark to evaluate spatial database performance. In Proceedings of the 2011 IEEE 27th International Conference on Data Engineering, Hannover, Germany, 11–16 April 2011; pp. 1139–1150. [Google Scholar]
- Baru, C.; Bhandarkar, M.; Nambiar, R.; Poess, M.; Rabl, T. Big data benchmarking. In Proceedings of the 6th International Workshop, WBDB 2015, Toronto, ON, Canada, 16–17 June 2015 and 7th International Workshop, WBDB 2015, New Delhi, India, 14–15 December 2015; Revised Selected Papers. Springer: Berlin/Heidelberg, Germany; Volume 10044. [Google Scholar] [CrossRef]
- Sharma, M.; Paige, G.B.; Miller, S.N. DEM Development from Ground-Based LiDAR Data: A Method to Remove Non-Surface Objects. Remote. Sens. 2010, 2, 2629–2642. [Google Scholar] [CrossRef]
- Ding, Y.; Densham, P.J. Spatial strategies for parallel spatial modelling. Int. J. Geogr. Inf. Syst. 1996, 10, 669–698. [Google Scholar] [CrossRef]
- Stonebraker, M.; Brown, P.; Poliakov, A.; Raman, S. The Architecture of SciDB. In Proceedings of the Public-Key Cryptography PKC 2018, Janeiro, Brazil, 25–29 March 2018; pp. 1–16. [Google Scholar]
- Camara, G.; Assis, L.F.; Ribeiro, G.; Ferreira, K.R.; Llapa, E.; Vinhas, L. Big earth observation data analytics: Matching requirements to system architectures. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on Analytics for Big Geospatial Data—BigSpatial’16, San Francisco, CA, USA, 31 October 2016; pp. 1–6. [Google Scholar]
- Lu, M.; Pebesma, E.; Sanchez, A.H.; Verbesselt, J. Spatio-temporal change detection from multidimensional arrays: Detecting deforestation from MODIS time series. ISPRS J. Photogramm. Remote Sens. 2016, 117, 227–236. [Google Scholar] [CrossRef]
- Baumann, P.; Mazzetti, P.; Ungar, J.; Barbera, R.; Barboni, D.; Beccati, A.; Bigagli, L.; Boldrini, E.; Bruno, R.; Calanducci, A.; et al. Big Data Analytics for Earth Sciences: The EarthServer approach. Int. J. Digit. Earth 2015, 9, 3–29. [Google Scholar] [CrossRef]
- National Institute of Space Research. E-Sensing: Bg Earth Observation Data Analytics for LUCC. 2014. Available online: http://esensing.org/ (accessed on 1 June 2019).
- Gu, L.; Li, H. Memory or Time: Performance Evaluation for Iterative Operation on Hadoop and Spark. In Proceedings of the 2013 IEEE 10th International Conference on High Performance Computing and Communications & 2013 IEEE International Conference on Embedded and Ubiquitous Computing (HPCC_EUC), Zhangjiajie, China, 13–15 November 2013; pp. 721–727. [Google Scholar]
- Towns, J.; Cockerill, T.; Dahan, M.; Foster, I.; Gaither, K.; Grimshaw, A.; Hazlewood, V.; Lathrop, S.; Lifka, D.; Peterson, G.D.; et al. XSEDE: Accelerating Scientific Discovery. Comput. Sci. Eng. 2014, 16, 62–74. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Cheng, L.; Li, M.; Wang, J. Parallel scanline algorithm for rapid rasterization of vector geographic data. Comput. Geosci. 2013, 59, 31–40. [Google Scholar] [CrossRef]
- Eldawy, A.; Niu, L.; Haynes, D.; Su, Z. Large Scale Analytics of Vector+Raster Big Spatial Data. In Proceedings of the 25th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems—SIGSPATIAL’17, Redondo Beach, CA, USA, 7–10 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Yang, H.-C.; Dasdan, A.; Hsiao, R.-L.; Parker, D.S. Map-reduce-merge. In Proceedings of the 2007 ACM SIGMOD International Conference on Management of Data—SIGMOD’07, Beijing, China, 12–14 June 2007; pp. 1029–1040. [Google Scholar] [CrossRef]
- Afrati, F.N.; Ullman, J.D. Optimizing joins in a map-reduce environment. In Proceedings of the 13th International Conference on Extending Database Technology—EDBT’10, Lausanne, Switzerland, 22–26 March 2010; pp. 99–110. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, Z.; Sarwat, M. Spatial data management in apache spark: The GeoSpark perspective and beyond. GeoInformatica 2019, 23, 37–78. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}