
Vehicle Positioning and Speed Estimation Based on Cellular Network Signals for Urban Roads

Abstract
:1. Introduction
2. Research Background and Related Work
2.1. Cellular Networks
2.2. CFVD
2.3. Traffic Information Estimation
3. Vehicle Positioning Method
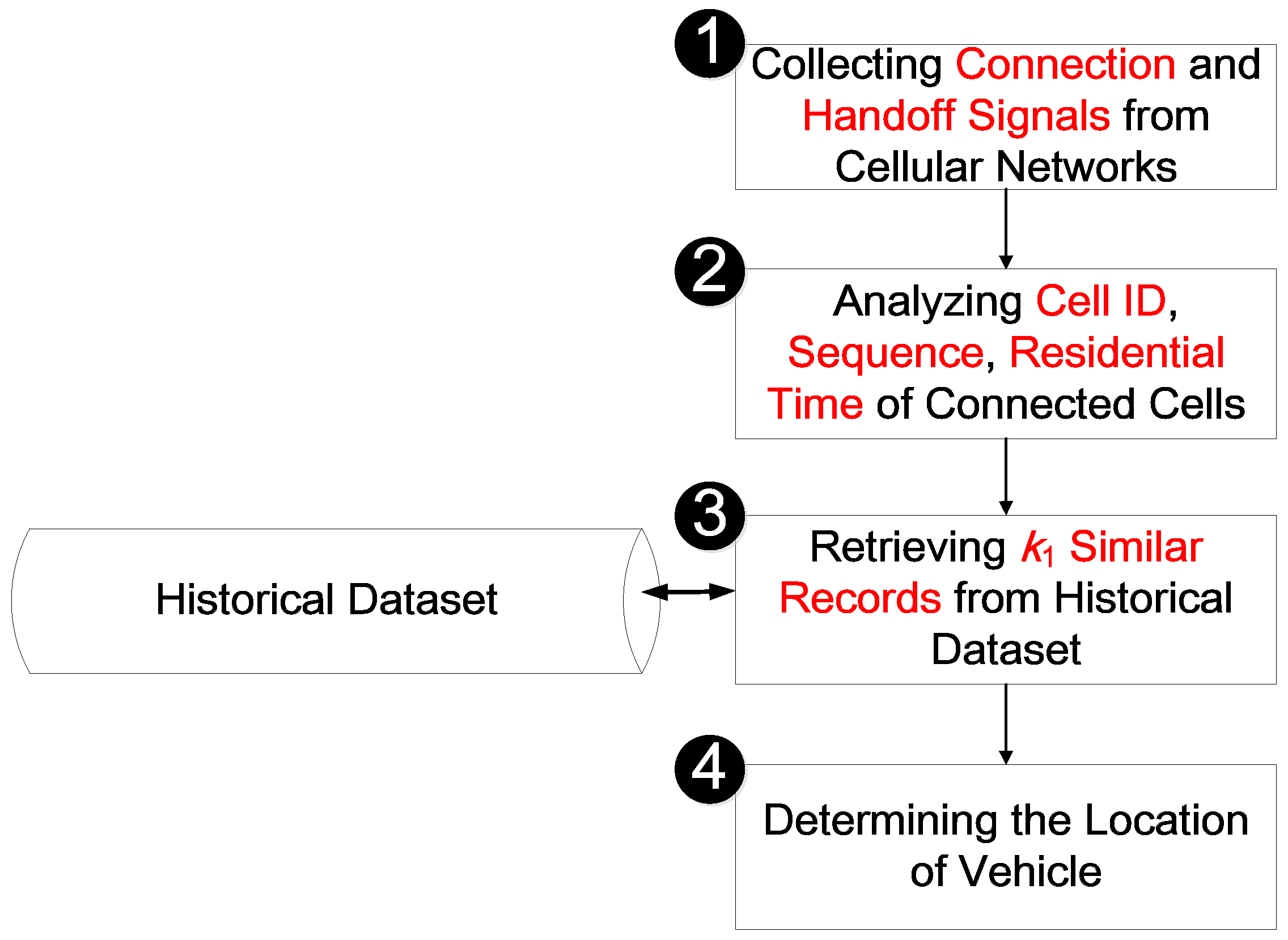
3.1. Collecting Connection and Handoff Signals from Cellular Networks
3.2. Analyzing Cell ID, Sequence, and Cell Dwell Time of Connected Cells
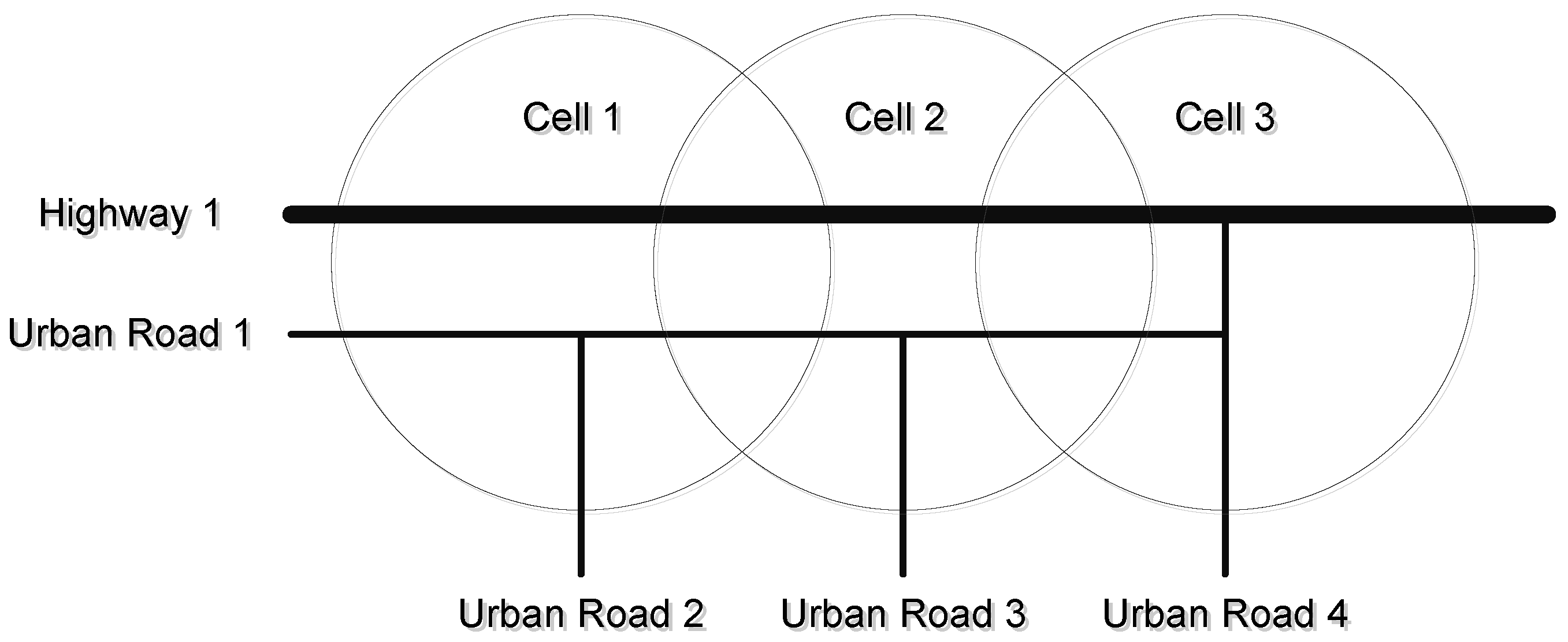
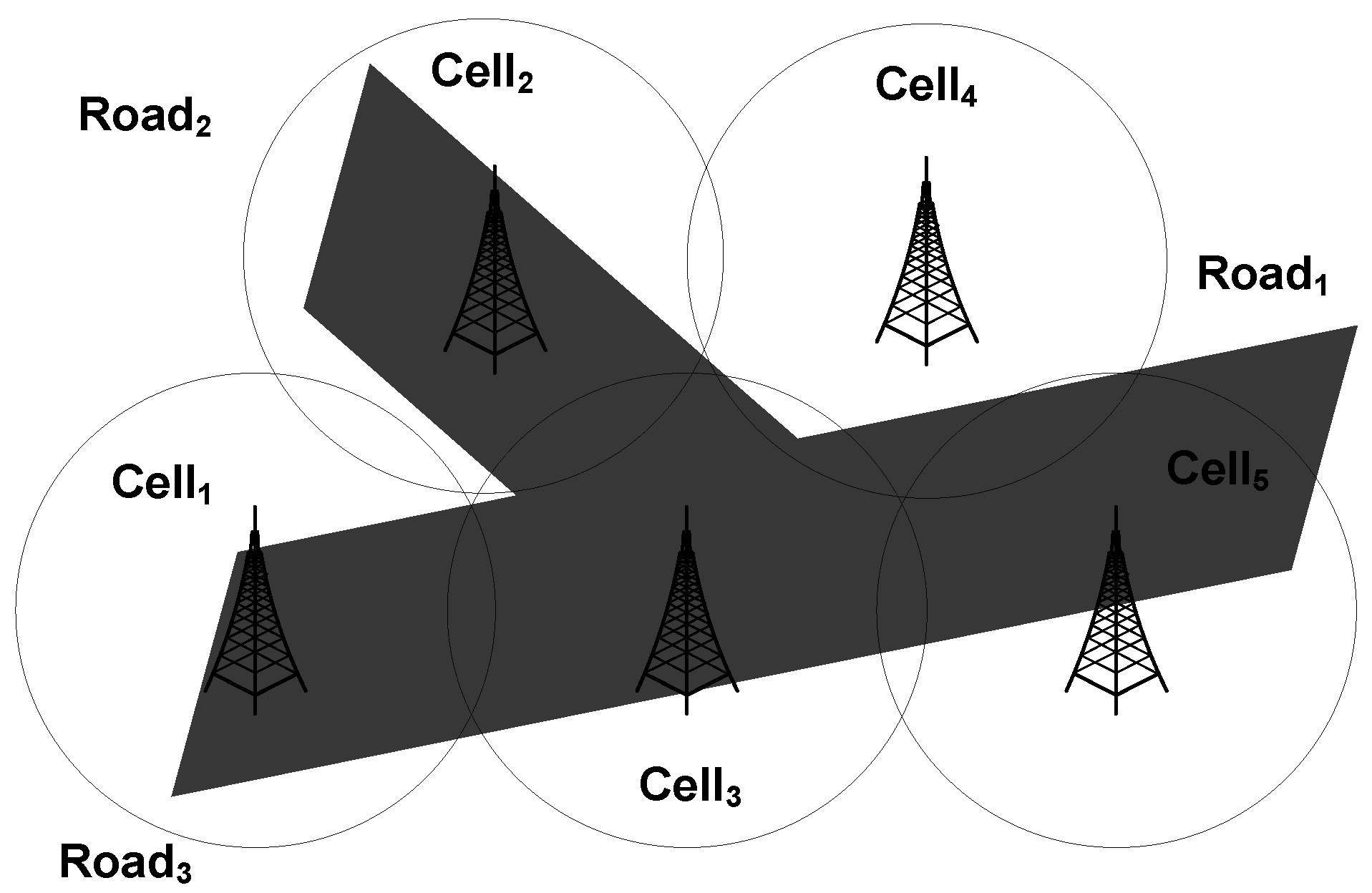
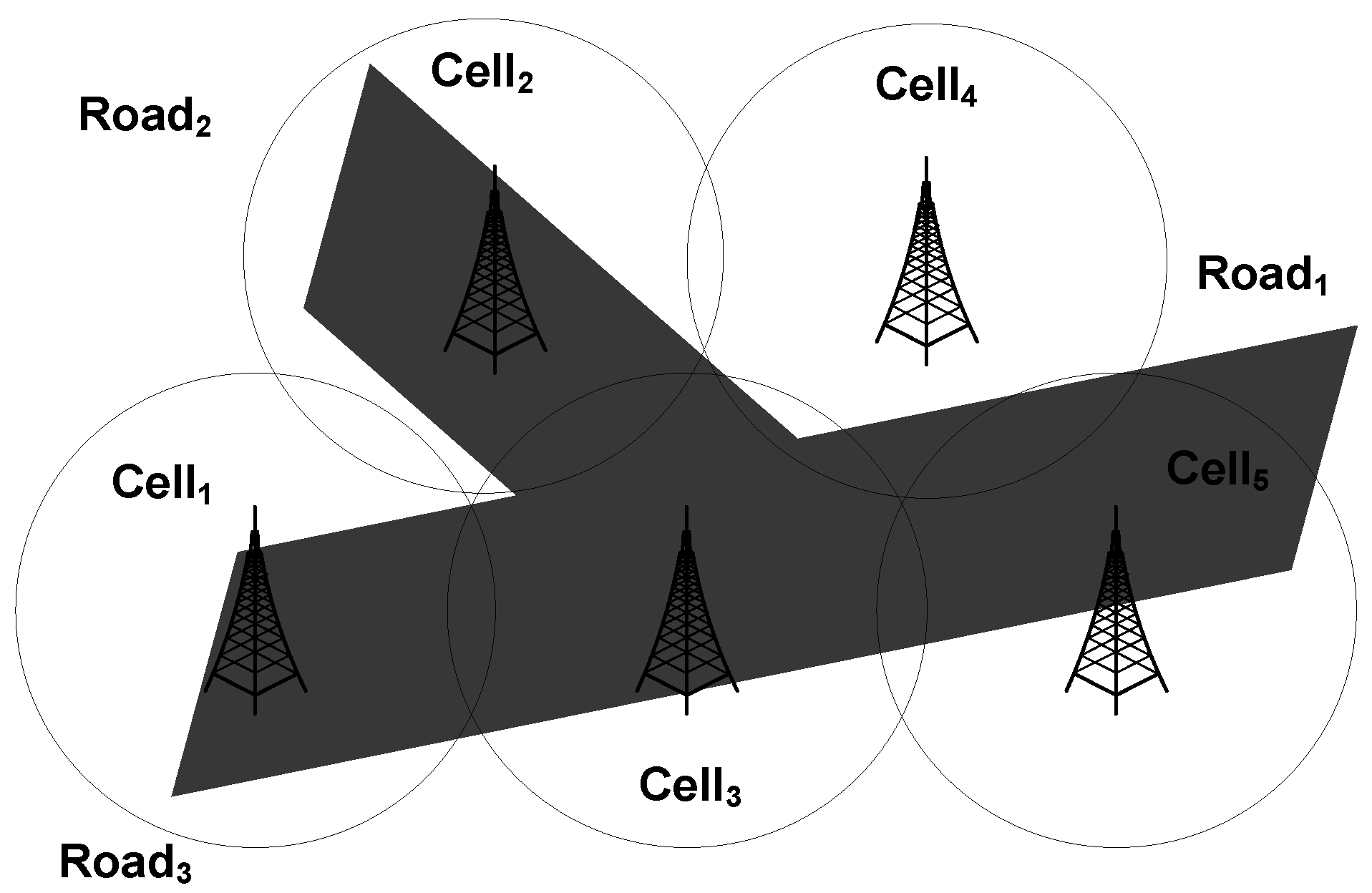
3.2.1. Cell ID
3.2.2. Sequence
3.2.3. Cell Dwell Time
3.2.4. Combination
3.3. Retrieving k1 Similar Records from a Historical Dataset
3.4. Determining the Location of a Vehicle
4. Speed Estimation Method
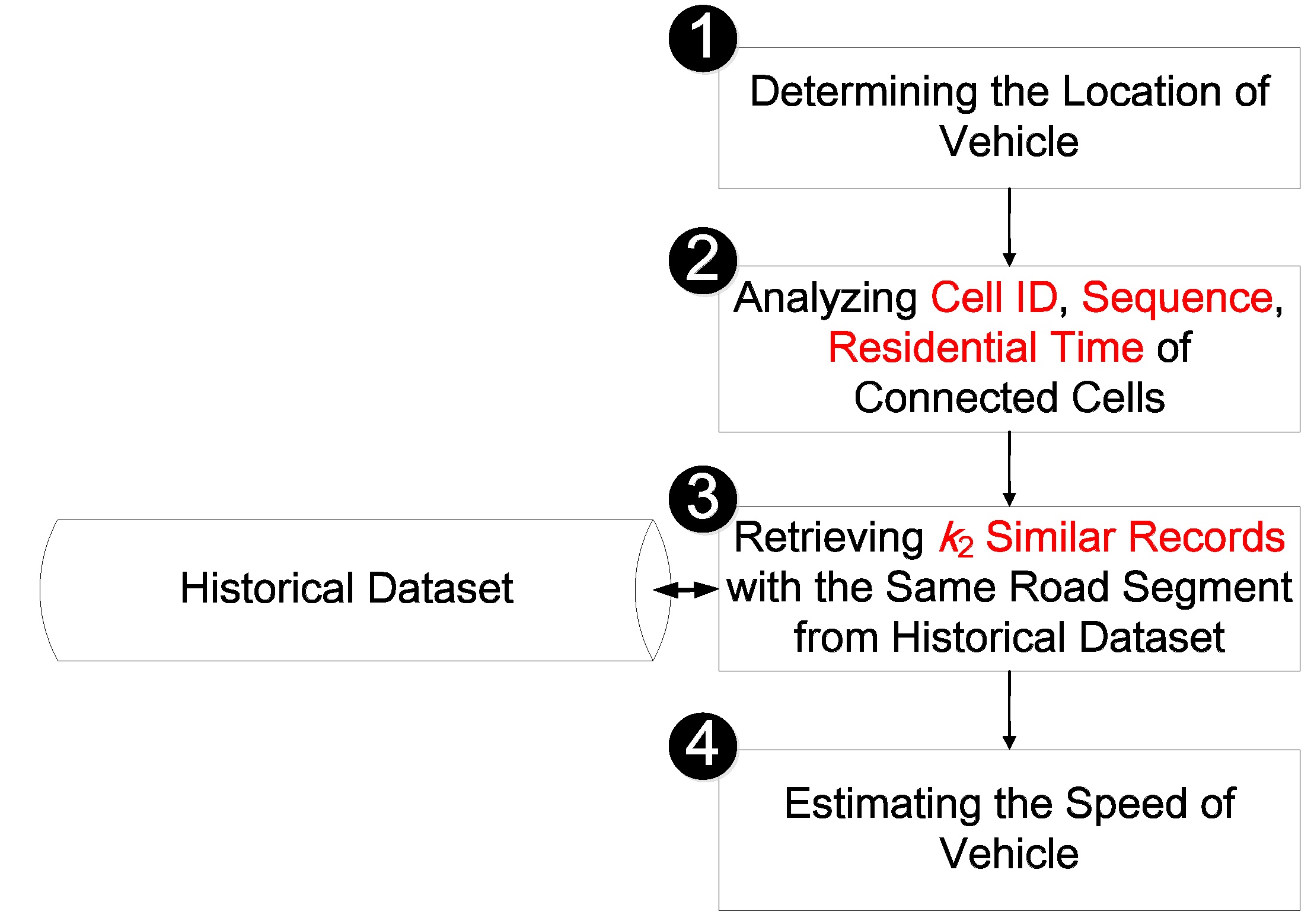
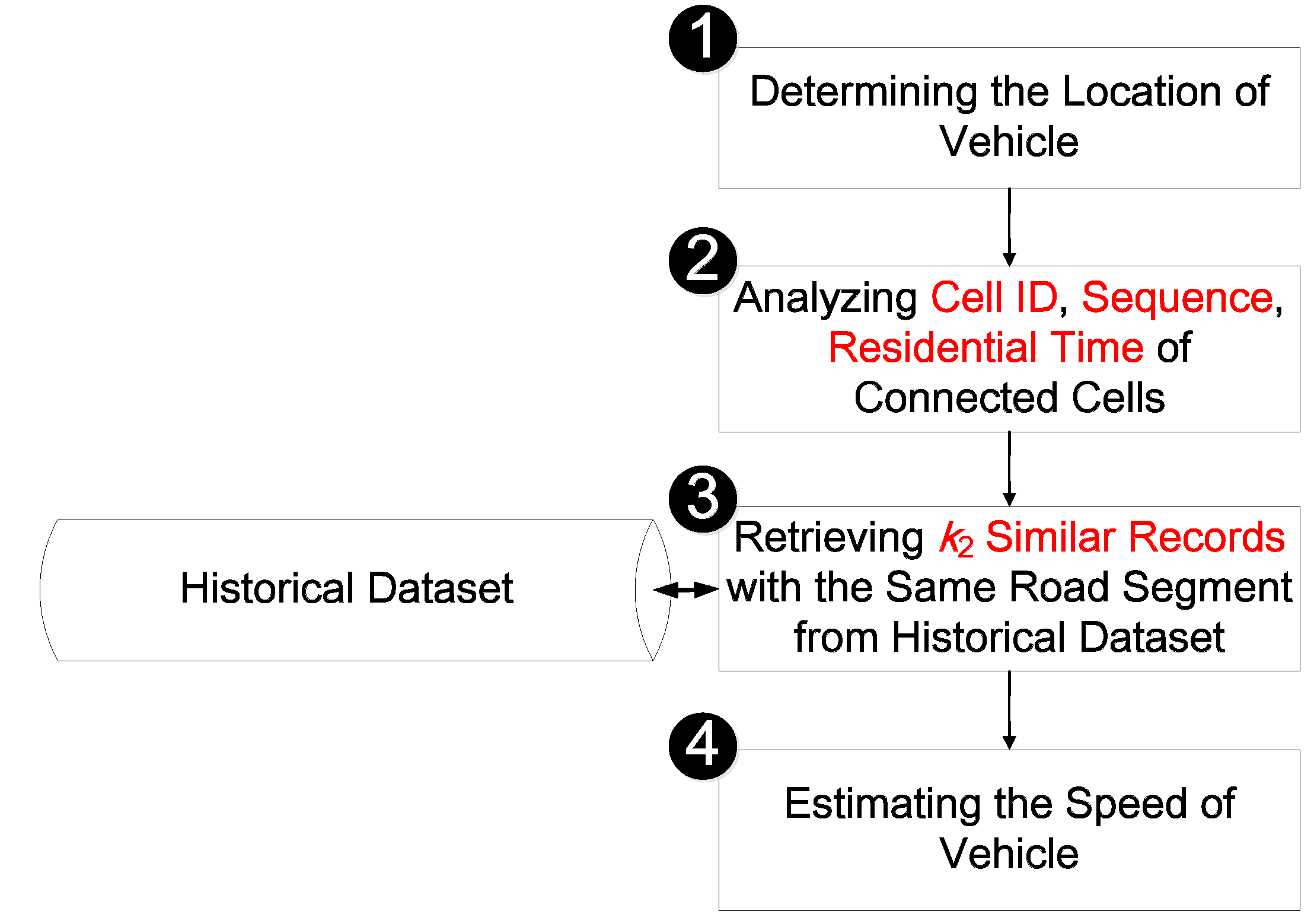
4.1. Determining the Location of Vehicle
4.2. Analyzing Cell ID, Sequence, and Cell Dwell Time of Connected Cells
4.3. Retrieving k2 Similar Records with the Same Road from Historical Dataset
4.4. Estimating the Speed of a Vehicle
5. Experimental Results and Discussions
5.1. Experimental Environment
5.2. The Evaluation of Vehicle Positioning Method
5.3. The Evaluation of the Speed Estimation Method
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jang, J.; Byun, S. Evaluation of traffic data accuracy using Korea detector testbed. IET Intell. Transp. Syst. 2011, 5, 286–293. [Google Scholar] [CrossRef]
- Ramezani, A.; Moshiri, B.; Kian, A.R.; Aarabi, B.N.; Abdulhai, B. Distributed maximum likelihood estimation for flow and speed density prediction in distributed traffic detectors with Gaussian mixture model assumption. IET Intell. Transp. Syst. 2012, 6, 215–222. [Google Scholar] [CrossRef]
- Middleton, D.; Parker, R. Vehicle Detector Evaluation; Report No. FHWA/TX-03 /2119-1; Texas Transportation Institute, Texas Department of Transportation: Austin, TX, USA, 2002.
- Chen, W.J.; Chen, C.H.; Lin, B.Y.; Lo, C.C. A traffic information prediction system based on global position system-equipped probe car reporting. Adv. Sci. Lett. 2012, 16, 117–124. [Google Scholar] [CrossRef]
- Hunter, T.; Herring, R.; Abbeel, P.; Bayen, A. Path and travel time inference from GPS probe vehicle data. In Proceedings of the Neural Information Processing Foundation Conference, Vancouver, BC, Canada, 5–10 December 2009.
- Cheu, R.L.; Xie, C.; Lee, D.H. Probe vehicle population and sample size for arterial speed estimation. Comput. Aided Civil Infrastruct. Eng. 2002, 17, 53–60. [Google Scholar] [CrossRef]
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.J.; Jacoboson, Q.; Bayen, A.M. Evaluation of traffic data obtained via GPS-enabled mobile phones: The mobile century field experiment. Transp. Res. Part C Emerg. Technol. 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Caceres, N.; Wideberg, J.P.; Benitez, F.G. Review of traffic data estimations extracted from cellular networks. IET Intell. Transp. Syst. 2008, 2, 179–192. [Google Scholar] [CrossRef]
- United Marketing Research. The Investigation Report on the Digital Opportunity about Phone Users. Research, Development and Evaluation Commission, Executive Yuan, 2011. Available online: http://www.rdec.gov.tw/public/Attachment/213014313671.pdf (accessed on 20 June 2016). [Google Scholar]
- Lai, W.K.; Kuo, T.H.; Chen, C.H. Vehicle speed estimation and forecasting methods based on cellular floating vehicle data. Appl. Sci. 2016, 6, 47. [Google Scholar] [CrossRef]
- Wu, C.I.; Chen, C.H.; Lin, B.Y.; Lo, C.C. Traffic information estimation methods from handover events. J. Test. Eval. 2016, 44, 656–664. [Google Scholar] [CrossRef]
- Chang, M.F.; Chen, C.H.; Lin, Y.B.; Chia, C.Y. The frequency of CFVD speed report for highway traffic. Wirel. Commun. Mob. Comput. 2015, 15, 879–888. [Google Scholar] [CrossRef]
- Janecek, A.; Valerio, D.; Hummel, K.A.; Ricciato, F.; Hlavacs, H. The cellular network as a sensor: From mobile phone data to real-time road traffic monitoring. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2551–2572. [Google Scholar] [CrossRef]
- Chen, C.H.; Chang, H.C.; Su, C.Y.; Lo, C.C.; Lin, H.F. Traffic speed estimation based on normal location updates and call arrivals from cellular networks. Simul. Model. Pract. Theory 2013, 35, 26–33. [Google Scholar] [CrossRef]
- Chang, H.C.; Chen, C.H.; Lin, B.Y.; Kung, H.Y.; Lo, C.C. Traffic information estimation using periodic location update events. Int. J. Innov. Comput. Inf. Control 2013, 9, 2031–2041. [Google Scholar]
- Maerivoet, S.; Logghe, S. Validation of travel times based on cellular floating vehicle data. In Proceedings of the 6th European Congress and Exhibition on Intelligent Transport Systems and Services, Aalborg, Denmark, 18–20 June 2007.
- Caceres, N.; Romero, L.M.; Benitez, F.G.; del Castillo, J.M. Traffic flow estimation models using cellular phone data. IET Intell. Transp. Syst. 2012, 13, 1430–1441. [Google Scholar] [CrossRef]
- Valerio, D.; Witek, T.; Ricciato, F.; Pilz, R.; Wiedermann, W. Road traffic estimation from cellular network monitoring: A hands-on investigation. In Proceedings of the IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo, Japan, 13–16 September 2009.
- Valerio, D.; D’Alconzo, A.; Ricciato, F.; Wiedermann, W. Exploiting cellular networks for road traffic estimation: A survey and a research roadmap. In Proceedings of the IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009.
- Chen, C.H.; Lo, C.C.; Lin, H.F. The Analysis of Speed-Reporting Rates from a cellular network based on a fingerprint-positioning algorithm. S. Afr. J. Ind. Eng. 2013, 24, 98–106. [Google Scholar] [CrossRef]
- Chen, C.H.; Lin, B.Y.; Chang, H.C.; Lo, C.C. The novel positioning algorithm based on cloud computing—A case study of intelligent transportation systems. Inf. Int. Interdiscip. J. 2012, 15, 4519–4524. [Google Scholar]
- Cheng, D.Y.; Chen, C.H.; Hsiang, C.H.; Lo, C.C.; Lin, H.F.; Lin, B.Y. The optimal sampling period of a fingerprint positioning algorithm for vehicle speed estimation. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Chen, C.H.; Lin, B.Y.; Lin, C.H.; Liu, Y.S.; Lo, C.C. A green positioning algorithm for campus guidance system. Int. J. Mob. Commun. 2012, 10, 119–131. [Google Scholar] [CrossRef]
- Gundlegård, D.; Karlsson, J.M. The smartphone as enabler for road traffic information based on cellular network signaling. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems, Hague, The Netherlands, 6–9 October 2013.
- Gundlegard, D.; Karlsson, J.M. Handover location accuracy for travel time estimation in GSM and UMTS. IET Intell. Transp. Syst. 2009, 3, 87–94. [Google Scholar] [CrossRef]
- Gundlegard, D.; Karlsson, J.M. Route classification in travel time estimation based on cellular network signaling. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009.
- Gundlegard, D.; Karlsson, J.M. Generating road traffic information from cellular networks—New possibilities in UMTS. In Proceedings of the 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006.
- Demissie, M.G.; de Almeida Correia, G.H.; Bento, C. Intelligent road traffic status detection system through cellular networks handover information: An exploratory study. Transp. Res. Part C Emerg. Technol. 2013, 32, 76–88. [Google Scholar] [CrossRef]
- Fiadino, P.; Valerio, D.; Ricciato, F.; Hummel, K.A. Steps towards the extraction of vehicular mobility patterns from 3G signaling data. Lect. Notes Comput. Sci. 2012, 7189, 66–80. [Google Scholar]
- Becker, R.A.; Caceres, R.; Hanson, K.; Loh, J.M.; Urbanek, S.; Varshavsky, A.; Volinsky, C. Route classification using cellular handoff patterns. In Proceedings of the 13th International Conference on Ubiquitous Computing, Beijing, China, 17–21 September 2011.
- Lai, W.K.; Kuo, T.H. An urban road segment determination method based on cellular floating vehicle data for tracking mobile stations. In Proceedings of the 7th International IEEE Conference on Ubi-Media Computing and Workshops, Ulaanbaatar, Mongolia, 12–14 July 2014.
- Han, J.; Kamber, M.; Pei, J. Data Mining: Concepts and Techniques, 3rd ed.; Morgan Kaufmann Publishers: San Francisco, CA, USA, 2011. [Google Scholar]
- Ihaka, R.; Gentleman, R. R: A language for data analysis and graphics. J. Comput. Graph. Stat. 1996, 5, 299–314. [Google Scholar]
- Ripley, B.D. The R project in statistical computing. MSOR Connect. 2001, 1, 23–25. [Google Scholar] [CrossRef]
- Racine, J.S. RStudio: A platform-independent IDE for R and sweave. J. Appl. Econ. 2012, 27, 167–172. [Google Scholar] [CrossRef]
- Ripley, B.; Venables, W. Class: Functions for Classification. The Comprehensive R Archive Network 2015. Available online: https://cran.r-project.org/web/packages/class/index.html (accessed on 20 June 2016).
- Meyer, D.; Dimitriadou, E.; Hornik, K.; Weingessel, A.; Leisch, F.; Chang, C.C.; Lin, C.C. e1071: Nisc Functions of the Department of Statistics, Probability Theory Group. The Comprehensive R Archive Network 2015. Available online: https://cran.r-project.org/web/packages/e1071/index.html (accessed on 20 June 2016).
- Hothorn, T.; Hornik, K.; Strobl, C.; Zeileis, A. Party: A Laboratory for Recursive Partytioning. The Comprehensive R Archive Network 2015. Available online: https://cran.r-project.org/web/packages/party/index.html (accessed on 20 June 2016).
- Fritsch, S.; Guenther, F. Neuralnet: Training of Neural Networks. The Comprehensive R Archive Network 2012. Available online: https://cran.r-project.org/web/packages/neuralnet/index.html (accessed on 20 June 2016).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Record ID | Mobile Station ID | Time | Cell ID | Signals |
|---|---|---|---|---|
| 1 | IMSI1 | 18 May 2016 16:08:02 | Cell1 | Call Arrival |
| 2 | IMSI1 | 18 May 2016 16:10:35 | Cell2 | Handoff |
| 3 | IMSI1 | 18 May 2016 16:10:46 | Cell1 | Handoff |
| 4 | IMSI1 | 18 May 2016 16:11:07 | Cell2 | Handoff |
| 5 | IMSI1 | 18 May 2016 16:15:58 | Cell3 | Handoff |
| 6 | IMSI1 | 18 May 2016 16:18:39 | Cell3 | Call Complete |
| Record | Road ID | Speed (km/h) | c1 | c2 | c3 | c4 | c5 | o1 | o2 | o3 | o4 | o5 | t1 | t2 | t3 | t4 | t5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| h1 | Road1 | 60 | 1 | 1 | 1 | 0 | 0 | 1 | 0.5 | 0.25 | 0 | 0 | 0.25 | 1 | 0.5 | 0 | 0 |
| h2 | Road1 | 58 | 1 | 1 | 1 | 0 | 0 | 1 | 0.5 | 0.25 | 0 | 0 | 0.25 | 0.5 | 1 | 0 | 0 |
| h3 | Road1 | 40 | 1 | 1 | 1 | 0 | 0 | 0.5 | 1 | 0.25 | 0 | 0 | 1 | 0.5 | 0.25 | 0 | 0 |
| h4 | Road2 | 59 | 1 | 1 | 1 | 0 | 0 | 0.25 | 0.5 | 1 | 0 | 0 | 0.25 | 1 | 0.5 | 0 | 0 |
| h5 | Road2 | 50 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0.5 | 1 | 0.25 | 0 | 0 | 1 | 0.5 | 0.25 |
| h6 | Road2 | 53 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0.25 | 1 | 0.5 | 0 | 0 | 0.5 | 1 | 0.25 |
| r | ? | ? | 1 | 1 | 1 | 0 | 0 | 1 | 0.5 | 0.25 | 0 | 0 | 0.25 | 1 | 0.5 | 0 | 0 |
| Feature | Accuracy |
|---|---|
| Cell ID (Previous method [12,29]) | 51.85% |
| Cell ID and sequence | 92.59% |
| Cell ID and cell dwell time | 88.89% |
| Cell ID, sequence, and cell dwell time | 100% |
| Method | Precision | Recall | F1-Measure | Accuracy |
|---|---|---|---|---|
| Naive Bayes classification | 91.90% | 88.33% | 90.08% | 88.89% |
| Decision tree | 11.67% | 20.00% | 14.74% | 22.22% |
| Support vector machine | 27.78% | 50.00% | 35.71% | 55.56% |
| Back-propagation neural network | 65.83% | 56.67% | 60.91% | 59.26% |
| The proposed method | 100% | 100% | 100% | 100% |
| A | B | Distance Method | F1-Measure | Accuracy |
|---|---|---|---|---|
| {1, 0, 0} | {1, 0, 0} | Euclidean | 87.50% | 88.89% |
| {1, 0.5, 0} | {1, 0.5, 0} | Euclidean | 91.67% | 92.59% |
| {1, 1, 1} | {1, 1, 1} | Euclidean | 89.17% | 88.89% |
| {1, 0.67, 0.33} | {1, 0.67, 0.33} | Euclidean | 96.67% | 96.30% |
| {1, 0.5, 0.25} | {1, 0.5, 0.25} | Euclidean | 100.00% | 100.00% |
| {1, 0, 0} | {1, 0, 0} | Minkowski | 87.50% | 88.89% |
| {1, 0.5, 0} | {1, 0.5, 0} | Minkowski | 91.67% | 92.59% |
| {1, 1, 1} | {1, 1, 1} | Minkowski | 92.50% | 92.59% |
| {1, 0.67, 0.33} | {1, 0.67, 0.33} | Minkowski | 96.67% | 96.30% |
| {1, 0.5, 0.25} | {1, 0.5, 0.25} | Minkowski | 100.00% | 100.00% |
| {1, 0, 0} | {1, 0, 0} | Mahalanobis | 87.50% | 88.89% |
| {1, 0.5, 0} | {1, 0.5, 0} | Mahalanobis | 91.67% | 92.59% |
| {1, 1, 1} | {1, 1, 1} | Mahalanobis | 89.17% | 88.89% |
| {1, 0.67, 0.33} | {1, 0.67, 0.33} | Mahalanobis | 96.67% | 96.30% |
| {1, 0.5, 0.25} | {1, 0.5, 0.25} | Mahalanobis | 100.00% | 100.00% |
| Feature | Accuracy |
|---|---|
| Cell ID and sequence | 78.34% |
| Cell ID and cell dwell time | 80.86% |
| Cell ID, sequence, and cell dwell time | 83.81% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, W.-K.; Kuo, T.-H. Vehicle Positioning and Speed Estimation Based on Cellular Network Signals for Urban Roads. ISPRS Int. J. Geo-Inf. 2016, 5, 181. https://doi.org/10.3390/ijgi5100181
Lai W-K, Kuo T-H. Vehicle Positioning and Speed Estimation Based on Cellular Network Signals for Urban Roads. ISPRS International Journal of Geo-Information. 2016; 5(10):181. https://doi.org/10.3390/ijgi5100181
Chicago/Turabian StyleLai, Wei-Kuang, and Ting-Huan Kuo. 2016. "Vehicle Positioning and Speed Estimation Based on Cellular Network Signals for Urban Roads" ISPRS International Journal of Geo-Information 5, no. 10: 181. https://doi.org/10.3390/ijgi5100181
APA StyleLai, W.-K., & Kuo, T.-H. (2016). Vehicle Positioning and Speed Estimation Based on Cellular Network Signals for Urban Roads. ISPRS International Journal of Geo-Information, 5(10), 181. https://doi.org/10.3390/ijgi5100181