1. Introduction
Path planning plays a critical role in optimizing travel efficiency, conserving resources, and enhancing safety, and is widely applied in various fields, such as personal travel, logistics, and emergency response. Early path-planning algorithms primarily focused on finding the shortest path between a starting point and an endpoint in static and structured environments. These algorithms are typically optimized for factors such as distance or time, using simple geometric or topological computations to quickly generate a feasible path. However, with the continuous advancement of computer technology and data-processing capabilities, path planning has evolved to address dynamic and complex real-world scenarios. In autonomous driving systems, path planning now considers not only traditional metrics like distance and time but also integrates multiple factors such as traffic conditions, fuel consumption, and environmental impact. This enables improved travel efficiency, reduced resource consumption, and the promotion of sustainable development [
1,
2,
3,
4]. In pedestrian navigation, the focus has expanded to include urban environmental factors, such as aesthetics, natural elements, and the built environment [
5,
6,
7]. Incorporating these elements into navigation design not only enhances the enjoyment and comfort of walking but also effectively promotes healthier and more user-friendly travel options, supporting the creation of livable urban environments [
8].
Environmental models are crucial in path planning, as they provide the necessary spatial information and environmental data, directly affecting the accuracy, efficiency, and safety of path planning. However, constructing high-precision environmental models poses numerous challenges, including accurately representing complex 3D spaces, dynamically updating environmental information, and managing and processing large-scale data with significant resource demands. One promising approach is the use of voxels, as illustrated in
Figure 1. Voxel, short for “Volume Pixel”, can be seen as the 3D counterpart of a pixel in a 2D image. As a fundamental unit in 3D space, voxels are defined on a regular 3D grid and are used to represent spatial positions and their associated properties. Typically, a voxel is represented by its center point or a corner point rather than being directly stored as a geometric cube. Each voxel is associated with one or more values that describe measurable attributes or independent variables of real-world objects or phenomena, such as density, color, or other characteristics [
9,
10,
11].
Table 1 compares several 3D-representation methods for navigation. As shown in the table, compared to other methods, voxel models not only support complex 3D path-planning algorithms but also allow for flexible resolution adjustments and easy dynamic information updates, adapting to various application scenarios. Moreover, their structured data format simplifies model processing, further enhancing their potential and value in navigation applications.
Currently, there is still a lack of comprehensive summaries and discussions on voxel-based navigation, as well as on their advantages and disadvantages in practical applications. Therefore, this paper provides a systematic review of the existing applications of voxel-based modeling in research related to navigation and path planning, focusing on the characteristics, strengths, and weaknesses of voxel-based path planning. The contributions of this work are as follows:
We provide a detailed discussion of the history and characteristics of voxel-based navigation. To the best of our knowledge, this is the first review focusing on voxel-based navigation.
We review the key technologies required for voxel-based navigation, considering four critical aspects: voxel modeling, voxel segmentation, voxel analysis, and voxel management.
We investigate various applications of voxel-based navigation and discuss their advantages and disadvantages in these applications.
Based on the above, we analyze the potential and limitations of voxel-based navigation.
The remainder of this paper is organized as follows: In
Section 2, we describe the methods used in this literature review. In
Section 3, we discuss the advantages of voxel-based representation. In
Section 4, we outline the key technologies required for voxel-based navigation. In
Section 5, we review existing studies on voxel-based path planning.
Section 6 discusses the potential applications of voxel-based navigation. After that,
Section 7 delves into the limitations of voxel-based navigation and unresolved issues. Concluding insights and future research directions are summarized in
Section 8.
2. Review Methodology
To identify the literature relevant to this review, we employed a widely used review methodology following previous studies [
21,
22]. First, we selected a set of keywords and data sources to gather papers potentially related to our review. Next, we refined the selection based on specific eligibility criteria and expanded the literature pool through citation tracking. Finally, we classified the papers in the final collection.
Figure 2 illustrates our literature screening flowchart, presenting the specific steps of the screening process:
2.1. Initial Search
This review selected three data sources: Web of Science (
www.isiknowledge.com, accessed on 25 June 2024) Scopus (
www.scopus.com, accessed on 25 June 2024), and Google Scholar (
www.scholar.google.com, accessed on 25 June 2024). The initial search was conducted using a core keyword (“voxel”) to capture a wide range of the literature related to the research topic. We identified common themes and high-frequency terms by analyzing the search results, which were then used to optimize the keyword combinations. The optimized keywords mainly focused on the following research directions: “voxel AND 3D mapping”, “voxel AND pathfinding/navigation”, and “voxel AND GIS AND routing”. This process effectively helped us focus on the latest research findings related to voxel technology and its applications, providing more precise references for future research. Using the abovementioned keywords and data sources, we initially obtained 157 relevant papers. These papers spanned multiple disciplines, including computer vision, computing, engineering, and geology, demonstrating the wide range of applications and developments of voxel technology in various fields.
2.2. Eligibility Criteria and Selection Refining
We established a set of criteria for selecting the literature: (1) written in English; (2) published in 2010 or later; (3) related to navigation or addressing navigation issues; (4) using voxel models or voxel-based approaches. Based on these criteria, we initially selected 48 papers from the 157 retrieved documents, and through citation analysis we ultimately included 87 papers for the final review. The selection of 2010 as the starting point was made to focus on more contemporary research, reflecting the rapid progress in voxel-based techniques, computational methods, and their integration with emerging technologies like autonomous systems, which have gained considerable attention in recent years.
2.3. Literature Analysis and Classification
From the final pool of 83 papers, these publications were published between 2010 and 2024, including 32 conference papers and 51 journal papers. The top three sources of these publications are the following journals: ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences (7), International Journal of Applied Earth Observation and Geoinformation (6), and Automation in Construction (4).
Figure 3a shows the number of relevant articles published each year. The number of articles from 2010 to 2015 was relatively low and exhibited minimal fluctuation. From 2016 to 2018, there was a significant increase in the number of articles, and from 2019 to 2024, the overall number remained at a high level, indicating a continued growth trend.
By referring to previous studies [
23,
24,
25], we used VOSviewer for co-occurrence analysis of keywords, clustering, and visualizing 79 keywords that appeared at least three times, as shown in
Figure 4. The size of each node represented the frequency of keyword occurrence, and the lines connecting two nodes indicated whether they co-occurred, with the line width reflecting the frequency of co-occurrence. These keywords were divided into 5 clusters, based on their association strength.
Cluster 1 (colored in red) primarily involved topics related to drone navigation and sensor-based path planning. Core keywords included map, environment, sensor, path, UAV, planning, and obstacle avoidance. This cluster focused on drone path planning, sensor data fusion, and obstacle detection, with an emphasis on dynamic obstacle avoidance and path optimization in drone navigation.
Cluster 2 (colored in blue) primarily involved topics related to 3D reconstruction, voxel modeling, and path navigation. Core keywords included voxel, navigation, point cloud, structure, and ground. This cluster emphasized 3D environmental reconstruction and voxel modeling, using voxelization of point cloud data to achieve spatial structure extraction and environmental representation while supporting robot path navigation in 3D environments.
Cluster 3 (colored in green) primarily involved topics related to indoor real-time navigation and performance optimization. Core keywords include object, scene, accuracy, indoor environment, position, performance, and real time. This cluster emphasized precise object and scene recognition in 3D spatial modeling and navigation systems, particularly achieving high-accuracy object localization and navigation performance evaluation in indoor environments to enhance the navigation performance of robots or autonomous systems.
Cluster 4 (colored in yellow) primarily involved topics related to algorithm development and optimization methods. Core keywords included algorithm, approach, time, accuracy, and density. This cluster emphasized algorithm design and method optimization in 3D modeling and path planning, focusing on time efficiency, accuracy improvement, and data density handling in algorithms, exploring efficient methods to improve the performance of environmental reconstruction, path optimization, and navigation tasks.
Cluster 5 (colored in purple) primarily involved topics related to SLAM (Simultaneous Localization and Mapping) and real-time environmental mapping. Core keywords included slam, robot, real-time, and mapping. This cluster highlighted the application of SLAM technology in robot navigation, focusing on real-time environmental mapping and localization estimation, aiming to achieve efficient spatial mapping and localization synchronization, and optimizing robot performance in dynamic environments.
Based on the above analysis, we first selected papers related to voxel navigation technologies. Further, we categorized them into voxel-based modeling, voxel segmentation, voxel-based analysis, and voxel data storage and management, with the number and proportion of papers shown in
Figure 3b. In the second step, we selected papers related to the application of voxel navigation and categorized them based on the scenarios into indoor navigation and outdoor navigation. In the following sections, we will delve deeper into the examination of these research papers.
3. Advantages of Voxel-Based Representation
Based on a review of the literature, we found that voxel-based representation, a flexible and precise method for three-dimensional space representation, has been successfully applied in various fields, such as fire modeling [
26], indoor navigation [
27], and manufacturing simulation [
28]. The following discusses the advantages of voxel-based representation:
Firstly, voxel models have significant advantages in storing and managing three-dimensional geographic information, supporting more comprehensive 3D spatial analysis. Compared to traditional 2D GIS data, voxel models not only represent terrain changes accurately but also convert urban elements traditionally modeled as 2D surfaces (such as buildings and roads) into 3D voxel structures. This transformation not only reveals urban features and spatial connections that are difficult to detect with 2D data but also significantly benefits navigation-related activities. Voxel models provide finer-grained information for path planning and obstacle detection, enhancing the decision-making capability of navigation systems in complex environments, helping researchers and urban planners better understand and analyze complex urban spaces [
29,
30].
Secondly, voxel models excel at handling spatial topology. Each voxel has a well-defined topological relationship with its surrounding voxels, which provides reliable data support for path planning, spatial connectivity analysis, and material propagation studies. In navigation applications, voxel representation can effectively describe the 3D shape of obstacles, allowing path-planning algorithms to avoid obstacles and optimize travel paths more accurately. Moreover, voxel models also have strong adaptability, enabling real-time environmental updates and path adjustments, enhancing navigation systems’ robustness in complex and dynamic environments [
26,
27].
Finally, voxel models’ flexibility makes them particularly well-suited to navigation tasks that require dynamic updates and rapid responses. By simplifying the representation of complex 3D environments, voxel models can quickly adapt to constantly changing environments, particularly in systems like autonomous driving and drone navigation, where real-time perception and decision making are essential. Voxel technology significantly improves the efficiency and accuracy of path planning and obstacle avoidance.
These advantages highlight the important role of voxel integration in navigation-related activities, improving the precision, safety, and real-time responsiveness of path planning. With the continued advancement of computational power and big data technologies, voxel technology is expected to provide more efficient and precise solutions for future intelligent navigation systems.
4. Key Techniques for Voxel-Based Navigation
Based on our investigation into voxel-based navigation, we have identified four key aspects—modeling, segmentation, analysis, and data storage—that are closely linked to the efficient operation of the navigation system. As shown in
Figure 5, voxel-based modeling serves as the foundation of the navigation system. Constructing voxel maps in three-dimensional space effectively represents the geometric information of the environment and provides a spatial framework for subsequent path-planning and navigation algorithms. Voxel segmentation is used to identify different types of spatial areas (such as corridors, obstacles, or passable areas), providing the navigation system with precise data on accessibility and the location of obstacles. The voxel-based analysis involves further processing of voxel data to extract richer spatial information, including connectivity analysis, visibility analysis, spatial analysis, etc., which provides decision-making support for navigation algorithms. Voxel data storage and management is crucial for ensuring the efficient operation of the navigation system, relying on efficient storage structures and update mechanisms to ensure stable operation under different operating conditions, especially in dynamic environments. We briefly overview the applications and related literature on voxel-based modeling, voxel segmentation, voxel-based analysis, and voxel storage and management (see
Table 2). In the following sections, we discussed these four relevant issues in detail.
4.1. Voxel-Based Modeling
Voxel modeling is a crucial step in acquiring environmental information. Various data sources, such as Building Information Modeling (BIM), LiDAR, Computer-Aided Design (CAD), and CityGML, can be used to construct voxel models. Researchers have developed different voxelization algorithms and techniques to adapt to different application scenarios.
4.1.1. Indoor Environment
In indoor scene modeling, the primary data sources include BIM and LiDAR. BIM models usually contain highly detailed geometric information, building materials, system components, etc., but these complex details can impose a computational burden during path planning. Converting BIM models to voxel models can simplify data processing, retaining only the necessary geometric and spatial information, thereby optimizing computational efficiency. Ref. [
33] proposed a method to discretize BIM models into voxel sets for path planning, significantly reducing the time required for navigable analysis. Ref. [
34] proposed a method to automatically extract structures and boundaries from complex building models and convert them into voxel models based on geometric and semantic relationships. This method overcomes the complexity of extracting multi-story indoor spaces, but its accuracy and reliability depend on the quality of the input 3D building models. For buildings lacking CAD floor plans or BIM models, such as historical buildings or newly constructed buildings, LiDAR data become an important data source. Ref. [
80] utilized LiDAR data to build voxel models, particularly suitable for 3D point cloud analysis in indoor environments. Ref. [
27] presented a 3D indoor point cloud processing method based on octrees for path planning in multistory buildings. The method improves the efficiency of point cloud data processing by applying octree segmentation. Through semantic recognition of architectural elements (such as floors, walls, stairs, and obstacles), it accurately delineates navigable space and computes paths based on user constraints. However, this method relies on the Manhattan world assumption for model construction, which limits its generalizability. Ref. [
81] proposed a voxel-modeling method for indoor spaces combining point clouds and scanning trajectories, which is capable of identifying walkable spaces in various rooms without any constraints.
4.1.2. Outdoor Environment
Unlike indoor environments, outdoor scene modeling involves larger spatial areas and more diverse data sources. Ref. [
30] provided a set of algorithms that can generate voxels from point clouds, curves, or surface objects, obtaining voxel connectivity based on topological voxelization methods [
82], which helps in voxelized modeling of 3D city models. An example of voxelization of a surface is shown in
Figure 6. Ref. [
38] proposed a voxelization technique that combines BIM and GIS, achieving three-dimensional modeling and management of geological information, meeting the needs of different scales. Ref. [
40] proposed a voxel modeling and visualization framework for large-scale urban environments, effectively reducing memory consumption and supporting large urban models’ generation, storage, and real-time rendering.
The regular cubic grid structure of voxel models exhibits extremely high efficiency in operations such as spatial queries and neighborhood searches, making them particularly suitable for applications in complex indoor navigation and robotic path planning. Moreover, voxel models support three-dimensional topological analysis, clearly illustrating the adjacency and connectivity of different parts of the space, making them highly applicable in path-planning scenarios.
4.2. Voxel Segmentation
Semantic segmentation is crucial in voxel-based modeling for navigation tasks. While geometric segmentation divides 3D data, such as point clouds, meshes, or surfaces, into smaller, meaningful regions, semantic segmentation assigns each voxel a semantic label (e.g., “car”, “road”, “pedestrian”). This classification is essential for identifying navigable spaces and obstacles, which greatly enhances environmental understanding. In addition, semantic segmentation can also identify dynamic obstacles, further enhancing the system’s understanding of the environment and enabling real-time updates. This allows the navigation system to adapt to dynamic environment changes, ensuring more robust and reliable navigation in constantly changing scenarios. As a result, semantic segmentation improves the efficiency, safety, and adaptability of voxel-based navigation systems, supporting their ability to navigate complex and changing environments.
4.2.1. Segmentation of Static Objects
Traditional voxel-based semantic-segmentation methods mainly rely on handcrafted and extracted features (such as geometric features, color information, texture, etc.) and are then used in machine-learning algorithms (such as Conditional Random Fields (CRF) [
41]) for semantic segmentation. Ref. [
42] proposed a supervoxel-based 3D urban scene-segmentation-and-classification method, where supervoxels are first clustered using a chained-linking method and then classified based on surface normals, geometric centroids, color intensity, and geometric shape. Ref. [
27] performed semantic segmentation of indoor spaces by combining histogram analysis and region-growing methods based on an octree indoor space model, ultimately identifying walkable paths for pedestrians. This is shown in
Figure 7, which depicts the classification of different indoor components that are critical for determining navigable pathways. Traditional methods have strong interpretability but rely on expert knowledge for feature selection, making it challenging to handle high-dimensional features in complex and large-scale environments.
With the rise of deep learning, more research is leveraging deep-learning techniques for voxel labeling. Through multi-layer structures and convolution operations, neural networks can automatically learn features from high-dimensional data and capture complex relationships. Ref. [
43] introduced VoxNet, a framework based on Convolutional Neural Networks (CNNs) for real-time object recognition, converting 3D point clouds into voxel grids and using 3D CNNs for feature extraction. Ref. [
44] proposed OctNet, a 3D CNN architecture utilizing an octree structure for sparse 3D data, improving computational efficiency and storage. Ref. [
45] developed SpoxelNet, which transforms voxels into global descriptor vectors, enhancing feature capture and reducing errors in occluded directions, especially in complex indoor spaces. However, these methods perform less effectively in outdoor environments. Recently, new approaches combining voxel-based techniques with other methods have significantly improved handling of complex outdoor environments.
Table 3 compares their performance on the SemanticKITTI test set:
4.2.2. Segmentation of Static and Dynamic Objects
For navigation purposes, identifying static obstacles (such as furniture and walls) is relatively straightforward, while detecting and tracking dynamic obstacles is more complex. This process requires continuous monitoring of the environment and effective tracking of moving objects, to ensure safe and efficient navigation. Ref. [
51] proposed a method for detecting and tracking dynamic objects based on an octree structure, first converting point cloud data into voxels, then constructing a short-term map through the octree, comparing the current scan with the short-term map, to detect dynamic voxels, and performing clustering and tracking. Ref. [
52] developed a 3D perception system for dynamic urban environments, which is capable of detecting and classifying static and dynamic voxel obstacles. Ref. [
53] proposed a model-free tracking method that can perceive and understand the motion in dynamic environments in real time. With the development of deep learning, methods combining voxel models with deep learning frameworks have emerged, effectively handling static and dynamic objects and classifying moving objects, such as cars and pedestrians, especially in dynamic road scenes. Here, we present the performance of these methods on the SemanticKITTI dataset (see
Table 4):
4.3. Voxel-Based Analysis
Voxel-based spatial analysis is the core of voxel navigation. The intuitive description of spatial topology by voxels gives them a significant advantage in analyzing complex spatial relationships, such as topology, direction, and connectivity. The voxel model discretizes continuous 3D space into regular cubic units and clearly represents the connections and interactions between each voxel and its surrounding voxels through defined neighborhood relationships (6-neighbor, 18-neighbor, or 26-neighbor) and voxel indexing. This structure allows complex spatial relationships to be expressed and analyzed through simple and efficient computational methods without the need to compute and restore the spatial coordinates of the voxels. Additionally, by quantifying the geometric features of each unit in space, voxels provide an accurate description of spatial directional information. The directionality of each voxel in space can be obtained by calculating its normal vector or gradient, and this directional information helps in understanding the arrangement and distribution of elements in space. By combining the above information, the similarity between voxels can be measured, enabling the assessment of spatial connectivity, which is commonly used in geometric space segmentation [
58,
59,
60,
61].
Visibility analysis, which focuses on evaluating of line-of-sight, obstructions, and spatial relationships within a voxelized environment, is a specialized subcomponent of 3D spatial analysis and is also essential for voxel-based navigation. This type of analysis has widespread applications in generating path-planning networks and assessing urban environment safety. Ref. [
62] proposed a voxel-based visibility-analysis technique, using voxel models and Unity software to simulate fields of view and areas of interest. Ref. [
19] calculated the volume of visible space from specific viewpoints, using Digital Elevation Models (DEMs) to partition urban environments into voxels, providing a comprehensive evaluation of visible areas. Additionally, ref. [
63] proposed a quantification method using 3D isovists and voxels to measure the visible and occluded portions of the view volume for landmark-based navigation, focusing on visual pollution, especially from outdoor billboards. Ref. [
64] focused on the impact of vegetation on the visibility of traffic lights and signs in urban street environments, using highly detailed 3D city models and ray-tracing techniques to assess the visibility of signals and signs while considering visibility differences for various subjects (e.g., cars, bicycles, or pedestrians) (see
Figure 8). In summary, these visibility-analysis methods not only have significant implications for urban safety and visual pollution assessment but also provide valuable insights for voxel-based navigation, helping to build more efficient and safe navigation solutions.
4.4. Voxel Storage and Management
Voxel data structure plays a crucial role in 3D spatial representation, especially when dealing with complex scenes. However, due to the large number of voxels, especially in large-scale environments, storing and managing voxel data becomes challenging. To address these challenges, researchers have proposed various voxel data structures. We provide an overview of voxel structures based on the frequency of data structure updates, dividing them into static and dynamic grids.
4.4.1. Static Grids
Static grids, once generated, typically do not change or only undergo minimal updates. They are suitable for scenarios requiring fixed spatial partitioning and are appropriate for handling static or minimally changing environments. The regular grid structure [
66] is straightforward, storing voxels in a three-dimensional array. The topological relationships between voxels enable rapid queries and operations. However, regular grids are memory-inefficient, particularly for large scenes or high-resolution models, requiring substantial storage space. Sparse Voxel Octrees (SVOs) [
67] enhance memory efficiency by recursively subdividing space into smaller blocks and storing only occupied voxels. SVOs also support Level of Detail (LoD), allowing flexible rendering at various resolutions. While SVOs have been applied successfully across different fields [
27,
85,
86,
87], they still demand significant memory and bandwidth for huge scenes. Sparse Voxel Directed Acyclic Graphs (SVDAGs) further reduce storage by merging identical subtrees, significantly compressing voxel data while maintaining performance. Unlike traditional SVOs, an SVDAG shares pointers to identical subtrees, cutting down memory usage. It also eliminates decompression, providing compact and efficient voxel representation. This method is ideal for large-scale, high-resolution voxel data applications, such as city-scale 3D models and complex volumetric rendering. Several improvements have been made to SVDAGs, such as [
70,
71,
72], making voxel data structures more effective in managing large-scale models.
4.4.2. Dynamic Grids
Dynamic grid structures need to include real-time updating capabilities, flexible data structures, and support for high-frequency updates, to reflect changes in the environment and adapt to dynamic scenes. The main challenges lie in handling large amounts of dynamic data and maintaining consistency. Dynamic Tiling Grid (DT-Grid) [
73] introduces dynamic-grid segmentation methods, allowing flexible adjustment of voxel grids based on different resolutions and data densities, improving visual effects in dynamic scenes but also adding complexity to dynamic adjustments. Hierarchical Run-Length Encoding (HRLE) [
74] reduces voxel data storage needs through systematic run-length encoding while maintaining spatial hierarchy, making access and manipulation of voxel data feasible. VDB uses a hierarchical sparse voxel data structure, dividing volumetric data into small chunks and managing these chunks through a tree structure (typically an octree). Nodes containing only valid data are rapidly stored, significantly reducing unnecessary storage and computational overhead while allowing quick access and manipulation of voxel data. With advancements in hardware technology, GPU methods such as GVDB [
75] and GSPGrid [
78] are becoming dominant, also focusing on compatibility with more APIs [
79].
5. Voxel-Based Navigation
Based on the different navigation scenarios, we categorize the literature into indoor navigation, outdoor navigation, and autonomous driving scenarios (see
Table 5) and discuss the performance and advantages of voxel models in each scenario.
5.1. Indoor Navigation
The complexity and the diversity of indoor environments pose numerous challenges for indoor navigation, including intricate spatial layouts and multi-layered building structures. At the same time, the need for emergency evacuation is also critical. In such scenarios, traditional 2D maps often fail to provide sufficient information. With their detailed representation in 3D space and support for multi-story structures, voxel models have become a key tool in solving these problems.
Indoor environments typically feature complex layouts, including rooms, corridors, and furniture. These complex structures require navigation systems capable of handling various spatial relationships, particularly in navigating effectively among numerous obstacles and details. Ref. [
20] focuses on developing a strategy that allows drones to navigate using voxel models in known indoor environments. They designed a method to generate three-dimensional buffer zones around obstacles through an algorithm based on distance propagation, enabling drones to plot general paths that ensure safe navigation in complex indoor spaces by avoiding obstacles (see
Figure 9). The rich geometric and semantic information in BIM models provides prior knowledge for indoor navigation. Ref. [
88] combines voxel models with BIM, designing the BIM-based Indoor 3D Map model (BI3DM) that achieves indoor routing, laying the foundation for automated indoor navigation.
In indoor navigation, multi-story building structures present unique challenges. Multi-story buildings typically include vertical connections between different floors, such as stairs, elevators, and ramps, making applying traditional 2D navigation methods difficult. Ref. [
27] developed a method based on octree processing of 3D indoor point clouds, generating multi-level navigation maps suitable for multi-story path planning in complex indoor environments, considering the walkable spaces necessary for floor connections. Additionally, ref. [
89] simulated different movement behaviors (such as walking, rolling, and flying) in an octree-based indoor building model and integrated these behaviors into the path-planning algorithm. This method provides accurate 3D path navigation for users with different mobility needs, such as pedestrians, wheelchair users, and drones.
Emergency evacuation is of paramount importance in indoor navigation. In emergencies, such as fires, earthquakes, and other critical situations, effective evacuation planning not only improves escape efficiency but also reduces the risks associated with chaos and panic. Voxel models can analyze the passability of the interior of a building, identifying the most suitable evacuation paths and avoiding congestion and hazardous areas. Ref. [
97] classified indoor spaces into Pedestrian Free Passable Space (P-Space), Conditional Passable Space (C-Space), and Non-Passable Space (N-Space) in voxel models, further subdividing C-Space according to pedestrian movement patterns (crawling, knee–hand crawling, stooping, or upright walking). This contributed to effectively identifying and extracting passable spaces for pedestrians in indoor evacuation simulations. Ref. [
32] analyzed the passability of emergency exits in buildings, assessing the effectiveness of emergency exit routes and the overall safety of building evacuation plans.
In summary, voxel-based representations bring numerous benefits for indoor path planning. The advantage of voxel models lies in their ability to accurately represent the three-dimensional spatial structure of buildings, containing detailed geometric and semantic information, thereby addressing the inadequacies of traditional flat maps in complex environments. Compared to other 3D navigation methods, voxel models offer greater expressiveness and can more precisely reflect the details of buildings, particularly in multi-story indoor spaces and complex scenarios. Unlike grid-based or point cloud-based 3D navigation methods, voxel models handle local spatial variations more effectively, reducing computational complexity and improving path-planning efficiency. Additionally, voxel models demonstrate greater flexibility and adaptability in dealing with complex situations such as emergency evacuations, significantly enhancing navigation effectiveness.
5.2. Outdoor Navigation
Outdoor and indoor navigation differ significantly. Outdoor navigation involves diverse terrain features, such as city streets, forests, and mountains, and requires handling complex obstacles. We divide outdoor navigation into two scenarios: real-time navigation in unknown environments and path planning in pre-established environments, each with unique challenges and methods. In real-time navigation, sensors like cameras, radar, and LiDAR play a crucial role in generating real-time maps for safe navigation. For example, Ref. [
99] developed a navigation system for mobile robots in agricultural environments, using 3D camera data to build a three-dimensional voxel map of the agricultural environment. This voxel map allows the robot to identify open spaces and navigate efficiently within them. The ability to create and update such maps is crucial in dynamic and complex environments. Ref. [
103] used scanners mounted on rotating mechanisms to divide scanned spaces into voxels for pedestrian recognition and tracking, minimizing the likelihood of collisions between mobile robots and crowds. Ref. [
100] introduced a camera–LiDAR fusion method to address forest occlusion and lighting variation issues. They constructed a three-dimensional voxel map of the forest and introduced adjacency feature assessments based on the voxel map to estimate the navigability of the forest environment, enabling ground autonomous vehicles to traverse complex and dense forest terrains.
In the second scenario, path planning in established environments depends on existing maps of the surrounding area. Ref. [
104] combined 2D and 3D datasets collected by robot sensors and developed a ground-segmentation method to detect non-ground objects, helping to create detailed and accurate environmental maps. Ref. [
105] proposed an integrated path-planning method combining the three-dimensional voxel Jump Point Search (JPS) and the Markov Decision Process (MDP) to address static obstacles and dynamic threats. The 3D voxel JPS is used to generate global reference paths, ensuring collision-free flight paths around known static obstacles, thereby guiding drones safely through urban environments.
By dividing complex three-dimensional spaces into regular voxel grids, voxel models can describe obstacles and terrain features in detail, which is crucial for handling complex terrains, such as forests, city streets, or mountainous regions. Additionally, real-time updates to voxel data can address moving obstacles and emergent situations, providing stable and reliable path-planning support for outdoor navigation tasks of varying scales and complexities.
Compared to other outdoor scenarios, autonomous driving presents unique challenges, due to the complexity and dynamic nature of the driving environment. Autonomous systems must contend with dynamic obstacles, such as other vehicles, pedestrians, and cyclists, as well as navigate through dense urban structures and narrow roads. These factors place higher demands on environmental perception and path planning, warranting a separate discussion of autonomous driving scenarios. Ref. [
52] proposed a voxel-based method to segment static and dynamic obstacles. This system integrates time-dependent data to construct a voxel grid model, and it uses discriminant analysis to detect these obstacles (see
Figure 10). Ref. [
107] utilized LiDAR sensors on Autonomous Vehicles (AVs) to perceive the surrounding environment by voxelizing the 3D space with a fixed unit size and applying deep-learning techniques to identify voxels that exhibit key dynamic features. This approach enables rapid identification of objects that may impact AV safety and tracks their movement in the 3D observation space around the AV, providing a comprehensive safety assessment of the driving scenario. One critical aspect of vehicle navigation is accurately detecting road features, such as sidewalks, curbs, and lane markings. To this end, ref. [
108] developed a method that automatically extracts road features in urban environments, using dense Airborne Laser Scanning (ALS) data. By leveraging the high-resolution data provided by ALS, the method creates a detailed and accurate representation of the urban road network, significantly enhancing the reliability and safety of autonomous vehicle navigation systems. Recent studies [
109,
110,
111] have increasingly focused on combining Bird’s-Eye View (BEV) and voxel representations to improve the performance of autonomous driving systems and computer vision applications. This combination leverages the intuitive representation of BEV in the planar view and the detailed modeling capability of voxels in 3D space, leading to a more accurate and comprehensive understanding of the environment.
6. The Potential Applications of Voxel-Based Navigation
Although this paper mainly focuses on voxel-based navigation, other research fields would benefit from advancements in these studies. In this section, we list a set of applications of voxel-based navigation techniques that could serve as a basic function and lead to the generation of new models and algorithms.
6.1. Voxel-Based Navigation for Autonomous Driving
Autonomous driving has become a highly active research field. However, in autonomous driving, voxel-based navigation systems still face significant challenges in managing and processing large-scale voxel data. One key issue during voxelization is the loss of detail, especially when modeling complex environments. The complexity of urban roads, building details, and terrain variations require high-resolution voxel models. Low-resolution voxels may fail to accurately represent the position or structure of obstacles, thus reducing the precision of path planning. While reducing voxel size can mitigate the loss of detail, it significantly increases the computational load and memory consumption, posing challenges for real-time navigation tasks, where rapid updates and environmental analysis are crucial. Overly fine-grained voxel models can overwhelm computational resources, hindering real-time processing and even compromising safety. To address these challenges, common solutions include sampling techniques and parallel computing. For example, ref. [
112] proposed a collaborative framework where multiple devices work together to construct voxel-based indoor maps. However, the applicability of this framework to both indoor and outdoor modeling remains limited. With the rapid development of quantum computing, future research could explore its application in voxel-based urban environment modeling to further improve data-processing efficiency.
6.2. Voxel-Based Indoor Navigation for First Responders
In disaster response scenarios, quickly providing safe and reliable navigation routes for emergency responders is critical. This becomes particularly challenging in complex public buildings, such as train stations, hospitals, airports, or shopping centers, where dynamic hazards like fires and toxic smoke significantly increase the difficulty of navigation. Voxel-based modeling and navigation techniques demonstrate unique advantages in handling the uncertainties in such environments. These models not only provide detailed spatial layout information but also track real-time environmental changes, such as fire spread, smoke diffusion, and structural damage, to support optimal path planning for rescue efforts.
Voxel models, with their discrete and regularized representation, can effectively adapt to dynamic changes in complex scenarios, such as corridor planning, obstacle recognition, and emergency evacuation route selection. By continuously updating environmental data, these models can capture emerging hazards, including fire sources, collapsed walls, or expanding smoke areas, ensuring that navigation paths are adjusted in real time to avoid dangers and safeguard emergency personnel. In addition to representing static structures, voxel models are adept at handling dynamic obstacles like falling debris or the spread of toxic gases, integrating these changes into path planning to generate safe, adaptable routes. Furthermore, voxel models excel in emergency simulations by recreating dynamic scenarios, such as fire and smoke spread [
96,
98,
113], allowing for real-time evaluation of the safety and feasibility of evacuation routes. This capability enables responders to make faster, more informed decisions, thereby improving the efficiency and effectiveness of disaster response efforts.
6.3. Voxel-Based Modeling for Studying Human–Environment Interactions
With the continuous advancement of 3D data-acquisition and model-construction technologies [
114,
115,
116], 3D city models have been increasingly applied in various fields, such as urban design, spatial planning, facility management, and emergency response [
22]. In pedestrian navigation research, the influence of urban environmental features on route choice has become an important focus. Factors such as street width, green coverage, building height distribution, and the proportion of open views can significantly affect pedestrian route preferences. In recent years, there have been numerous explorations into the application of 3D city models in urban studies. For instance, [
117] utilized 3D models to extract environmental indicators, such as line-of-sight distance and sky view factor, integrating them into a walkability assessment model. Similarly, ref. [
118] developed a spatial index based on 3D building models to measure compactness. These studies highlight environmental features’ critical role in shaping pedestrian navigation behaviors. As noted by ref. [
119], 3D city models provide an integrated and comprehensive platform for analyzing the impact of natural and built environments on human activities. By discretizing and quantifying urban environmental attributes, voxel-based models offer robust technical support for analyzing how environmental factors influence pedestrians in choosing safer, faster, or more comfortable routes. However, research on developing 3D voxel-based urban models that support human–environment interaction analysis still needs to be completed, indicating a need for further exploration and refinement in this domain.
7. Challenges in Voxel-Based Navigation
Despite the advantages of voxel models in representing complex environments, handling dynamic scenarios, and supporting path planning, several challenges remain that need to be addressed. These issues not only affect the accuracy and efficiency of navigation systems but also point to future directions for research.
Firstly, voxel granularity is a fundamental challenge in voxel-based navigation. The size of a voxel directly determines the level of detail in environmental representation and the computational complexity of the system. Smaller voxels can capture fine details of the environment, which is especially useful in high-precision navigation scenarios, such as indoor environments or robot navigation. However, fine-grained voxel models significantly increase computational and storage costs, potentially affecting the system’s real-time performance. On the other hand, larger voxels simplify computation but may lead to the loss of important environmental details, reducing the accuracy of the navigation paths. Thus, selecting the appropriate voxel granularity for different application scenarios to balance accuracy and efficiency remains a key challenge. Future improvements may include adaptive voxelization methods, where voxel size is adjusted based on environmental complexity. Larger voxels can improve efficiency in simpler areas, while smaller voxels can ensure precision in more complex regions. Another potential approach is using multi-resolution voxel models, with coarse-grained voxels for global path planning and fine-grained voxels for local optimization, ensuring both precision and efficiency.
Secondly, path optimization is another major challenge in voxel-based navigation. While traditional pathfinding algorithms like A* perform well in voxel models, the resulting paths often exhibit rigid or “stepped” shapes, especially in highly dynamic or irregular environments. Such paths may lack smoothness and continuity, leading to suboptimal navigation performance. This rigidity not only increases travel or movement costs but can also impact the safety and efficiency of the navigation system, particularly in scenarios that require high agility, such as drones or robots navigating narrow indoor spaces. Furthermore, an additional challenge in path optimization is effectively avoiding dynamic obstacles. Complex 3D environments often involve unpredictable dynamic factors, which can render previously planned paths unusable. To address these uncertainties, navigation systems need to be highly flexible and capable of real-time adjustments, allowing them to generate new, safe routes when the environment changes. Future research should focus on exploring more advanced path-optimization algorithms, such as those leveraging reinforcement learning or intelligent search strategies, to dynamically adjust the search process and generate more flexible and smoother paths.
The third challenge lies in integrating voxel models with other existing data models. While voxel models excel in 3D geometric representation, other data models, such as CityGML, IndoorGML, and IFC, offer rich semantic information, including building functionality, usage, and floor structure. Seamlessly integrating voxel models with these existing data models, allowing navigation systems to perform path planning based not only on geometry but also on semantic information, is a crucial direction for future research. This integration could enhance the adaptability of navigation systems and support multi-functional navigation applications, such as urban planning and building management.
8. Conclusions
This paper presents the first systematic review of voxel-based navigation technology, covering key technologies, specific applications, development potential, and associated challenges. We have detailed the latest advancements in voxel-based navigation for both indoor and outdoor environments and explored the significant advantages of voxel models. These models excel in representing complex environments, handling dynamic scenarios, and supporting path planning. For instance, voxel models offer precise environmental representation and are dynamically updated to accommodate real-time changes, significantly enhancing the flexibility and reliability of navigation systems. Additionally, voxel models possess strong emergency-simulation capabilities, effectively supporting decision making in complex scenarios.
However, despite the extensive application of voxel modeling in navigation studies, several significant challenges still need to be solved, such as voxel granularity, path optimization, and model integration. Addressing these issues will require further advancements in algorithms and model improvements. Furthermore, this paper primarily focuses on voxel-based navigation models and does not delve into other related aspects, such as route communication, user interface, and localization. Our review aims to provide not only deep insights into voxel-based navigation technology but also valuable guidance for researchers in other fields considering the application of voxel models in their studies.
Author Contributions
Lei Niu: conceptualization, methodology, data collection, and theoretical analysis; Zhiyong Wang: formal analysis, writing—original draft; Zhaoyu Lin, Yueying Zhang, Yingwei Yan and Ziqi He: data collection and processing. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Fundamental Research Funds for the Central Universities (NO.2023ZYGXZR056), the National Science Foundation of China (NSFC) (42171401 and 41771433), and the Natural Science Foundation of Gansu Province (20JR10RA247). Additionally, this research was conducted as part of the project “Integrating IndoorGML with Outdoors: Automatic Routing Graph Generation for Indoor-Outdoor Transitional Space for Seamless Navigation”, funded by the ISPRS council through the ISPRS Scientific Initiatives 2023.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
This research was conducted as part of the project “Integrating IndoorGML with Outdoors: Automatic Routing Graph Generation for Indoor-Outdoor Transitional Space for Seamless Navigation”. We also thank Xuke Hu for his constructive comments.
Conflicts of Interest
The authors declare no conflicts of interest.
Correction Statement
This article has been republished with a minor correction to the Funding statement. This change does not affect the scientific content of the article.
References
- Yang, B.; Guo, C.; Jensen, C.S.; Kaul, M.; Shang, S. Stochastic skyline route planning under time-varying uncertainty. In Proceedings of the 2014 IEEE 30th International Conference on Data Engineering, Chicago, IL, USA, 31 March–4 April 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 136–147. [Google Scholar]
- Kriegel, H.P.; Renz, M.; Schubert, M. Route skyline queries: A multi-preference path-planning approach. In Proceedings of the 2010 IEEE 26th International Conference on Data Engineering (ICDE 2010), Long Beach, CA, USA, 1–6 March 2021; IEEE: Piscataway, NJ, USA, 2010; pp. 261–272. [Google Scholar]
- Guo, C.; Yang, B.; Andersen, O.; Jensen, C.S.; Torp, K. Ecosky: Reducing vehicular environmental impact through eco-routing. In Proceedings of the 2015 IEEE 31st International Conference on Data Engineering, Seoul, Republic of Korea, 13–17 April 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1412–1415. [Google Scholar]
- Owais, M.; Alshehri, A. Pareto Optimal Path Generation Algorithm in Stochastic Transportation Networks. IEEE Access 2020, 8, 58970–58981. [Google Scholar] [CrossRef]
- Elford, S.; Adams, M.D. Exposure to ultrafine particulate air pollution in the school commute: Examining low-dose route optimization with terrain-enforced dosage modelling. Environ. Res. 2019, 178, 108674. [Google Scholar] [CrossRef] [PubMed]
- Zou, B.; Li, S.; Zheng, Z.; Zhan, B.F.; Yang, Z.; Wan, N. Healthier routes planning: A new method and online implementation for minimizing air pollution exposure risk. Comput. Environ. Urban Syst. 2020, 80, 101456. [Google Scholar] [CrossRef]
- Novack, T.; Wang, Z.; Zipf, A. A System for Generating Customized Pleasant Pedestrian Routes Based on OpenStreetMap Data. Sensors 2018, 18, 3794. [Google Scholar] [CrossRef] [PubMed]
- Mehta, V. Lively Streets-Determining Environmental Characteristics to Support Social Behaviour. J. Plan. Educ. Res. 2007, 27, 165–187. [Google Scholar] [CrossRef]
- Srihari, S.N. Representation of three-dimensional digital images. ACM Comput. Surv. (CSUR) 1981, 13, 399–424. [Google Scholar] [CrossRef]
- Kaufman, A.; Shimony, E. 3D scan-conversion algorithms for voxel-based graphics. In Proceedings of the 1986 Workshop on Interactive 3D Graphics, New York, NY, USA, 23–24 October 1986; pp. 45–75. [Google Scholar]
- Xu, Y.; Tong, X.; Stilla, U. Voxel-based representation of 3D point clouds: Methods, applications, and its potential use in the construction industry. Autom. Constr. 2021, 126, 103675. [Google Scholar] [CrossRef]
- Balado, J.; Díaz-Vilariño, L.; Arias, P.; Lorenzo, H. Point clouds for direct pedestrian pathfinding in urban environments. ISPRS J. Photogramm. Remote Sens. 2019, 148, 184–196. [Google Scholar] [CrossRef]
- López-Pazos, G.; Balado, J.; Díaz-Vilariño, L.; Arias, P.; Scaioni, M. Pedestrian pathfinding in urban environments: Preliminary results. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 35–41. [Google Scholar] [CrossRef]
- Díaz-Vilariño, L.; Boguslawski, P.; Khoshelham, K.; Lorenzo, H. Obstacle-aware indoor pathfinding using point clouds. ISPRS Int. J. Geo-Inf. 2019, 8, 233. [Google Scholar] [CrossRef]
- Gu, J.; Cao, Q.; Huang, Y. Rapid traversability assessment in 2.5 D grid-based map on rough terrain. Int. J. Adv. Robot. Syst. 2008, 5, 40. [Google Scholar] [CrossRef]
- Dergachev, S.; Muravyev, K.; Yakovlev, K. 2.5 d mapping, pathfinding and path following for navigation of a differential drive robot in uneven terrain. IFAC-PapersOnLine 2022, 55, 80–85. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H.; Lu, Z.; Zeng, Q. A dynamic fusion pathfinding algorithm using delaunay triangulation and improved a-star for mobile robots. IEEE Access 2021, 9, 20602–20621. [Google Scholar] [CrossRef]
- Ali, T.; Mehrabian, A. A novel computational paradigm for creating a Triangular Irregular Network (TIN) from LiDAR data. Nonlinear Anal. Theory Methods Appl. 2009, 71, e624–e629. [Google Scholar] [CrossRef]
- Fisher-Gewirtzman, D.; Shashkov, A.; Doytsher, Y. Voxel based volumetric visibility analysis of urban environments. Surv. Rev. 2013, 45, 451–461. [Google Scholar] [CrossRef]
- Li, F.; Zlatanova, S.; Koopman, M.; Bai, X.; Diakité, A. Universal path planning for an indoor drone. Autom. Constr. 2018, 95, 275–283. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Zlatanova, S.; van Oosterom, P. Indoor navigation supported by the Industry Foundation Classes (IFC): A survey. Autom. Constr. 2021, 121, 103436. [Google Scholar] [CrossRef]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef]
- Hou, Z.W.; Liu, X.; Zhou, S.; Jing, W.; Yang, J. Bibliometric Analysis on the Research of Geoscience Knowledge Graph (GeoKG) from 2012 to 2023. ISPRS Int. J. Geo-Inf. 2024, 13, 255. [Google Scholar] [CrossRef]
- Dželalija, G.; Roić, M. Bibliometrics on Public Utilities Registration Research. Land 2023, 12, 1097. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Citation-based clustering of publications using CitNetExplorer and VOSviewer. Scientometrics 2017, 111, 1053–1070. [Google Scholar] [CrossRef]
- Moreno, A.; Posada, J.; Segura, Á.; Arbelaiz, A.; García-Alonso, A. Interactive fire spread simulations with extinguishment support for virtual reality training tools. Fire Saf. J. 2014, 64, 48–60. [Google Scholar] [CrossRef]
- Fichtner, F.W.; Diakité, A.A.; Zlatanova, S.; Voûte, R. Semantic enrichment of octree structured point clouds for multi-story 3D pathfinding. Trans. GIS 2018, 22, 233–248. [Google Scholar] [CrossRef]
- Ueng, S.K.; Chen, L.G.; Jen, S.Y. Voxel-based virtual manufacturing simulation for three-dimensional printing. Adv. Mech. Eng. 2018, 10, 1687814018781632. [Google Scholar] [CrossRef]
- Gorte, B.; Zlatanova, S. Rasterization and voxelization of two-and three-dimensional space partitionings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 283–288. [Google Scholar] [CrossRef]
- Nourian, P.; Gonçalves, R.; Zlatanova, S.; Ohori, K.A.; Vo, A.V. Voxelization algorithms for geospatial applications: Computational methods for voxelating spatial datasets of 3D city models containing 3D surface, curve and point data models. MethodsX 2016, 3, 69–86. [Google Scholar] [CrossRef] [PubMed]
- Hübner, P.; Wursthorn, S.; Weinmann, M. Normal Classification of 3D Occupancy Grids for Voxel-Based Indoor Reconstruction from Point Clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 4, 121–128. [Google Scholar] [CrossRef]
- Gorte, B.; Aleksandrov, M.; Zlatanova, S. Towards egress modelling in voxel building models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 43–47. [Google Scholar] [CrossRef]
- Wang, Q.; Zuo, W.; Guo, Z.; Li, Q.; Mei, T.; Qiao, S. BIM voxelization method supporting cell-based creation of a path-planning environment. J. Constr. Eng. Manag. 2020, 146, 04020080. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhu, Q.; Du, Z.; Zlatanova, S.; Zhang, Y.; Zhou, Y.; Li, Y. Free multi-floor indoor space extraction from complex 3D building models. Earth Sci. Inform. 2017, 10, 69–83. [Google Scholar] [CrossRef]
- Meyer, T.; Brunn, A.; Stilla, U. Change detection for indoor construction progress monitoring based on BIM, point clouds and uncertainties. Autom. Constr. 2022, 141, 104442. [Google Scholar] [CrossRef]
- Homainejad, N.; Zlatanova, S.; Pfeifer, N. A voxel-based method for the three-dimensional modelling of heathland from lidar point clouds: First results. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 3, 697–704. [Google Scholar] [CrossRef]
- van der Vaart, J.; Stoter, J.; Agugiaro, G.; Ohori, K.A.; Hakim, A.; El Yamani, S. Enriching lower LoD 3D city models with semantic data computed by the voxelisation of BIM sources. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2024, 10, 297–308. [Google Scholar] [CrossRef]
- Khan, M.S.; Kim, I.S.; Seo, J. A boundary and voxel-based 3D geological data management system leveraging BIM and GIS. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103277. [Google Scholar] [CrossRef]
- Aljumaily, H.; Laefer, D.F.; Cuadra, D.; Velasco, M. Point cloud voxel classification of aerial urban LiDAR using voxel attributes and random forest approach. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103208. [Google Scholar] [CrossRef]
- Gehrung, J.; Hebel, M.; Arens, M.; Stilla, U. A framework for voxel-based global scale modeling of urban environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLII-2/W1, 45–51. [Google Scholar] [CrossRef]
- Kim, B.S.; Kohli, P.; Savarese, S. 3D scene understanding by voxel-CRF. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1425–1432. [Google Scholar]
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Segmentation based classification of 3D urban point clouds: A super-voxel based approach with evaluation. Remote Sens. 2013, 5, 1624–1650. [Google Scholar] [CrossRef]
- Maturana, D.; Scherer, S. Voxnet: A 3d convolutional neural network for real-time object recognition. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 922–928. [Google Scholar]
- Riegler, G.; Osman Ulusoy, A.; Geiger, A. Octnet: Learning deep 3d representations at high resolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3577–3586. [Google Scholar]
- Chang, M.Y.; Yeon, S.; Ryu, S.; Lee, D. Spoxelnet: Spherical voxel-based deep place recognition for 3d point clouds of crowded indoor spaces. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 8564–8570. [Google Scholar]
- Tang, H.; Liu, Z.; Zhao, S.; Lin, Y.; Lin, J.; Wang, H.; Han, S. Searching efficient 3d architectures with sparse point-voxel convolution. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 685–702. [Google Scholar]
- Zhu, X.; Zhou, H.; Wang, T.; Hong, F.; Ma, Y.; Li, W.; Li, H.; Lin, D. Cylindrical and asymmetrical 3d convolution networks for lidar segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 9939–9948. [Google Scholar]
- Yan, X.; Gao, J.; Li, J.; Zhang, R.; Li, Z.; Huang, R.; Cui, S. Sparse single sweep lidar point cloud segmentation via learning contextual shape priors from scene completion. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtually, 2–9 February 2021; Volume 35, pp. 3101–3109. [Google Scholar]
- Zhang, Y.; Zhou, Z.; David, P.; Yue, X.; Xi, Z.; Gong, B.; Foroosh, H. Polarnet: An improved grid representation for online lidar point clouds semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 9601–9610. [Google Scholar]
- Hou, Y.; Zhu, X.; Ma, Y.; Loy, C.C.; Li, Y. Point-to-voxel knowledge distillation for lidar semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 8479–8488. [Google Scholar]
- Ćesić, J.; Marković, I.; Jurić-Kavelj, S.; Petrović, I. Short-term map based detection and tracking of moving objects with 3d laser on a vehicle. In Informatics in Control, Automation and Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 205–222. [Google Scholar]
- Asvadi, A.; Premebida, C.; Peixoto, P.; Nunes, U. 3D Lidar-based static and moving obstacle detection in driving environments: An approach based on voxels and multi-region ground planes. Robot. Auton. Syst. 2016, 83, 299–311. [Google Scholar] [CrossRef]
- Ushani, A.K.; Wolcott, R.W.; Walls, J.M.; Eustice, R.M. A learning approach for real-time temporal scene flow estimation from LIDAR data. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5666–5673. [Google Scholar] [CrossRef]
- Liu, J.; Chang, C.; Liu, J.; Wu, X.; Ma, L.; Qi, X. Mars3d: A plug-and-play motion-aware model for semantic segmentation on multi-scan 3d point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 9372–9381. [Google Scholar]
- Thomas, H.; Qi, C.R.; Deschaud, J.E.; Marcotegui, B.; Goulette, F.; Guibas, L.J. Kpconv: Flexible and deformable convolution for point clouds. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 6411–6420. [Google Scholar]
- Duerr, F.; Pfaller, M.; Weigel, H.; Beyerer, J. Lidar-based recurrent 3d semantic segmentation with temporal memory alignment. In Proceedings of the 2020 International Conference on 3D Vision (3DV), Fukuoka, Japan, 25–28 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 781–790. [Google Scholar]
- Bentley, R.; Blakely, T.; Kavanagh, A.; Aitken, Z.; King, T.; McElwee, P.; Giles-Corti, B.; Turrell, G. A longitudinal study examining changes in street connectivity, land use, and density of dwellings and walking for transport in Brisbane, Australia. Environ. Health Perspect. 2018, 126, 057003. [Google Scholar] [CrossRef] [PubMed]
- Deschaud, J.E.; Goulette, F. A fast and accurate plane detection algorithm for large noisy point clouds using filtered normals and voxel growing. In Proceedings of the 3DPVT, Paris, France, 17–20 May 2010. [Google Scholar]
- Hu, Z.; Bai, D. Planar object detection from 3D point clouds based on pyramid voxel representation. Multimed. Tools Appl. 2017, 76, 24343–24357. [Google Scholar] [CrossRef]
- Li, M.L.; Zong, W.P.; Li, G.Y.; Wang, L. Extraction of structure line segments from point clouds using voxel-based region growing. Acta Opt. Sin. 2018, 38, 144–154. [Google Scholar]
- Xu, Y.; Ye, Z.; Huang, R.; Hoegner, L.; Stilla, U. Robust segmentation and localization of structural planes from photogrammetric point clouds in construction sites. Autom. Constr. 2020, 117, 103206. [Google Scholar] [CrossRef]
- Aleksandrov, M.; Zlatanova, S.; Kimmel, L.; Barton, J.; Gorte, B. Voxel-based visibility analysis for safety assessment of urban environments. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 11–17. [Google Scholar] [CrossRef]
- Chmielewski, S. Towards managing visual pollution: A 3D ISOVIST and voxel approach to advertisement Billboard Visual Impact Assessment. ISPRS Int. J. Geo-Inf. 2021, 10, 656. [Google Scholar] [CrossRef]
- Hirt, P.R.; Holtkamp, J.; Hoegner, L.; Xu, Y.; Stilla, U. Occlusion detection of traffic signs by voxel-based ray tracing using highly detailed models and MLS point clouds of vegetation. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103017. [Google Scholar] [CrossRef]
- Li, P.; Wang, Q.; Guo, Z.; Mei, T.; Li, Q.; Qiao, S.; Zuo, W. Identifying Falling-from-Height Hazards in Building Information Models: A Voxelization-Based Method. J. Constr. Eng. Manag. 2022, 148, 04021203. [Google Scholar] [CrossRef]
- Wang, S.W.; Kaufman, A.E. Volume-sampled 3D modeling. IEEE Comput. Graph. Appl. 1994, 14, 26–32. [Google Scholar] [CrossRef]
- Laine, S.; Karras, T. Efficient sparse voxel octrees. In Proceedings of the 2010 ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, Montreal, QC, Canada, 21–23 May 2010; pp. 55–63. [Google Scholar]
- Dado, B.; Kol, T.R.; Bauszat, P.; Thiery, J.M.; Eisemann, E. Geometry and attribute compression for voxel scenes. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2016; Volume 35, pp. 397–407. [Google Scholar]
- Careil, V.; Billeter, M.; Eisemann, E. Interactively modifying compressed sparse voxel representations. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2020; Volume 39, pp. 111–119. [Google Scholar]
- Čerešník, P.; Madoš, B.; Baláž, A.; Bilanová, Z. SSVDAG*: Efficient Volume Data Representation Using Enhanced Symmetry-Aware Sparse Voxel Directed Acyclic Graph. In Proceedings of the 2019 IEEE 15th International Scientific Conference on Informatics, Poprad, Slovakia, 20–22 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 000201–000206. [Google Scholar]
- Vokorokos, L.; Madoš, B.; Bilanová, Z. PSVDAG: Compact Voxelized Representation of 3D Scenes Using Pointerless Sparse Voxel Directed Acyclic Graphs. Comput. Inform. 2020, 39, 587–616. [Google Scholar] [CrossRef]
- Villanueva, A.J.; Marton, F.; Gobbetti, E. SSVDAGs: Symmetry-aware sparse voxel DAGs. In Proceedings of the 20th ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, Redmond, WA, USA, 27–28 February 2016; pp. 7–14. [Google Scholar]
- Nielsen, M.B.; Museth, K. Dynamic tubular grid: An efficient data structure and algorithms for high resolution level sets. J. Sci. Comput. 2006, 26, 261–299. [Google Scholar] [CrossRef]
- Houston, B.; Nielsen, M.B.; Batty, C.; Nilsson, O.; Museth, K. Hierarchical RLE level set: A compact and versatile deformable surface representation. ACM Trans. Graph. (TOG) 2006, 25, 151–175. [Google Scholar] [CrossRef]
- Hoetzlein, R.K. GVDB: Raytracing sparse voxel database structures on the GPU. In Proceedings of the 16th High Performance Graphics, Dublin, Ireland, 27–28 June 2016; pp. 109–117. [Google Scholar]
- Museth, K. VDB: High-resolution sparse volumes with dynamic topology. ACM Trans. Graph. (TOG) 2013, 32, 1–22. [Google Scholar] [CrossRef]
- Setaluri, R.; Aanjaneya, M.; Bauer, S.; Sifakis, E. SPGrid: A sparse paged grid structure applied to adaptive smoke simulation. ACM Trans. Graph. (TOG) 2014, 33, 1–12. [Google Scholar] [CrossRef]
- Gao, M.; Wang, X.; Wu, K.; Pradhana, A.; Sifakis, E.; Yuksel, C.; Jiang, C. GPU optimization of material point methods. ACM Trans. Graph. (TOG) 2018, 37, 1–12. [Google Scholar] [CrossRef]
- Aleksandrov, M.; Zlatanova, S.; Heslop, D.J. Voxelisation algorithms and data structures: A review. Sensors 2021, 21, 8241. [Google Scholar] [CrossRef]
- Boguslawski, P.; Zlatanova, S.; Gotlib, D.; Wyszomirski, M.; Gnat, M.; Grzempowski, P. 3D building interior modelling for navigation in emergency response applications. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103066. [Google Scholar] [CrossRef]
- Staats, B.R.; Diakité, A.A.; Voûte, R.L.; Zlatanova, S. Automatic generation of indoor navigable space using a point cloud and its scanner trajectory. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W4, 393–400. [Google Scholar] [CrossRef]
- Laine, S. A topological approach to voxelization. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2013; Volume 32, pp. 77–86. [Google Scholar]
- Alonso, I.; Riazuelo, L.; Montesano, L.; Murillo, A.C. 3d-mininet: Learning a 2d representation from point clouds for fast and efficient 3d lidar semantic segmentation. IEEE Robot. Autom. Lett. 2020, 5, 5432–5439. [Google Scholar] [CrossRef]
- Yan, X.; Gao, J.; Zheng, C.; Zheng, C.; Zhang, R.; Cui, S.; Li, Z. 2dpass: 2d priors assisted semantic segmentation on lidar point clouds. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 677–695. [Google Scholar]
- Li, M.; Sun, C. Refinement of LiDAR point clouds using a super voxel based approach. ISPRS J. Photogramm. Remote Sens. 2018, 143, 213–221. [Google Scholar] [CrossRef]
- Baciu, S.; Oniga, F.; Nedevschi, S. Semantic 3D Obstacle Detection Using an Enhanced Probabilistic Voxel Octree Representation. In Proceedings of the 2020 IEEE 16th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 293–298. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Chen, Q.; Chen, J.; Huang, W. Pathfinding method for an indoor drone based on a BIM-semantic model. Adv. Eng. Inform. 2022, 53, 101686. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, Q.; Zlatanova, S.; Liu, L.; Ye, C.; Feng, T. Weighted octree-based 3D indoor pathfinding for multiple locomotion types. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102900. [Google Scholar] [CrossRef]
- Goldstein, R.; Walmsley, K.; Morris, N.; Tessier, A. Algorithms for Voxel-Based Architectural Space Analysis. In Proceedings of the 2023 Annual Modeling and Simulation Conference (ANNSIM), Hamilton, ON, Canada, 23–26 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 508–519. [Google Scholar]
- Song, C.; Chen, Z.; Wang, K.; Luo, H.; Cheng, J.C. BIM-supported scan and flight planning for fully autonomous LiDAR-carrying UAVs. Autom. Constr. 2022, 142, 104533. [Google Scholar] [CrossRef]
- Rodenberg, O.B.P.M.; Verbree, E.; Zlatanova, S. Indoor A* pathfinding through an octree representation of a point cloud. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, IV-2/W1, 249–255. [Google Scholar] [CrossRef]
- Elseicy, A.; Nikoohemat, S.; Peter, M.; Elberink, S.O. Space subdivision of indoor mobile laser scanning data based on the scanner trajectory. Remote Sens. 2018, 10, 1815. [Google Scholar] [CrossRef]
- Koopman, M. 3D Path-Finding in a Voxelized Model of an Indoor Environment. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2016. Available online: http://resolver.tudelft.nl/uuid:13788271-e19d-41e1-b827-fe7535a66281 (accessed on 18 December 2024).
- Xiong, Q.; Zhu, Q.; Du, Z.; Zhu, X.; Zhang, Y.; Niu, L.; Li, Y.; Zhou, Y. A dynamic indoor field model for emergency evacuation simulation. ISPRS Int. J. Geo-Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Song, Y.; Niu, L.; Liu, P.; Li, Y. Fire hazard assessment with indoor spaces for evacuation route selection in building fire scenarios. Indoor Built Environ. 2022, 31, 452–465. [Google Scholar] [CrossRef]
- Xie, R.; Zlatanova, S.; Lee, J.; Aleksandrov, M. A Motion-Based Conceptual Space Model to Support 3D Evacuation Simulation in Indoor Environments. ISPRS Int. J. Geo-Inf. 2023, 12, 494. [Google Scholar] [CrossRef]
- Lee, J.; Lee, M.; Jun, C. Fire evacuation simulation considering the movement of pedestrian according to fire spread. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4/W9, 273–281. [Google Scholar] [CrossRef]
- Schulze, M. 3D-camera based navigation of a mobile robot in an agricultural environment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, XXXVIII, 538–542. [Google Scholar]
- Ruetz, F.; Borges, P.; Suenderhauf, N.; Hernández, E.; Peynot, T. Forest Traversability Mapping (FTM): Traversability Estimation Using 3D Voxel-Based Normal Distributed Transform to enable forest Navigation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 8714–8721. [Google Scholar]
- Nevalainen, P.; Li, Q.; Melkas, T.; Riekki, K.; Westerlund, T.; Heikkonen, J. Navigation and mapping in forest environment using sparse point clouds. Remote Sens. 2020, 12, 4088. [Google Scholar] [CrossRef]
- Ji, Y.; Tanaka, Y.; Tamura, Y.; Kimura, M.; Umemura, A.; Kaneshima, Y.; Murakami, H.; Yamashita, A.; Asama, H. Adaptive motion planning based on vehicle characteristics and regulations for off-road UGVs. IEEE Trans. Ind. Inform. 2018, 15, 599–611. [Google Scholar] [CrossRef]
- Tsugita, R.; Nishino, N.; Chugo, D.; Muramatsu, S.; Yokota, S.; Hashimoto, H. Pedestrian detection and tracking of a mobile robot with multiple 2D laser range scanners. In Proceedings of the 2016 9th International Conference on Human System Interactions (HSI), Portsmouth, UK, 6–8 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 412–417. [Google Scholar]
- Song, W.; Cho, K.; Um, K.; Won, C.S.; Sim, S. Intuitive terrain reconstruction using height observation-based ground segmentation and 3D object boundary estimation. Sensors 2012, 12, 17186–17207. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Zhang, M.; Low, K.H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace. Transp. Res. Part Emerg. Technol. 2021, 129, 103123. [Google Scholar] [CrossRef]
- Chiciudean, V.; Oniga, F. Pathfinding in a 3D Grid for UAV Navigation. In Proceedings of the 2022 IEEE 18th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 22–24 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 305–311. [Google Scholar]
- Kang, M.; Seo, J.; Hwang, K.; Yoon, Y. Critical voxel learning with vision transformer and derivation of logical AV safety assessment scenarios. Accid. Anal. Prev. 2024, 195, 107422. [Google Scholar] [CrossRef]
- Soilán, M.; Truong-Hong, L.; Riveiro, B.; Laefer, D. Automatic extraction of road features in urban environments using dense ALS data. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 226–236. [Google Scholar] [CrossRef]
- Wang, S.; Caesar, H.; Nan, L.; Kooij, J.F. Unibev: Multi-modal 3d object detection with uniform bev encoders for robustness against missing sensor modalities. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju, Republic of Korea, 2–5 June 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 2776–2783. [Google Scholar]
- Zhang, J.; Zhang, Y.; Liu, Q.; Wang, Y. SA-BEV: Generating Semantic-Aware Bird’s-Eye-View Feature for Multi-view 3D Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–3 October 2023; pp. 3348–3357. [Google Scholar]
- Liu, H.; Wang, B.; Zhang, L.; Ji, J.; Zhang, Y. BEVoxSeg: BEV-Voxel Representation for Fast and Accurate Camera-Based 3D Segmentation. In Proceedings of the ICASSP 2024—2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Republic of Korea, 14–19 April 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 3345–3349. [Google Scholar]
- Golodetz, S.; Cavallari, T.; Lord, N.A.; Prisacariu, V.A.; Murray, D.W.; Torr, P.H. Collaborative large-scale dense 3d reconstruction with online inter-agent pose optimisation. IEEE Trans. Vis. Comput. Graph. 2018, 24, 2895–2905. [Google Scholar] [CrossRef] [PubMed]
- Taleai, M.; Mokhtari, M.; Zlatanova, S. 3d based smoke fire emission and emergency evacuation simulation in high-rise buildings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 139–146. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Shiode, N. 3D urban models: Recent developments in the digital modelling of urban environments in three-dimensions. GeoJournal 2000, 52, 263–269. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. LiDAR point clouds to 3-D Urban Models: A review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 606–627. [Google Scholar] [CrossRef]
- Yin, L. Street level urban design qualities for walkability: Combining 2D and 3D GIS measures. Comput. Environ. Urban Syst. 2017, 64, 288–296. [Google Scholar] [CrossRef]
- Koziatek, O.; Dragićević, S. A local and regional spatial index for measuring three-dimensional urban compactness growth. Environ. Plan. B Urban Anal. City Sci. 2019, 46, 143–164. [Google Scholar] [CrossRef]
- Miller, H.J.; Tolle, K. Big data for healthy cities: Using location-aware technologies, open data and 3D urban models to design healthier built environments. Built Environ. 2016, 42, 441–456. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the International Society for Photogrammetry and Remote Sensing. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).





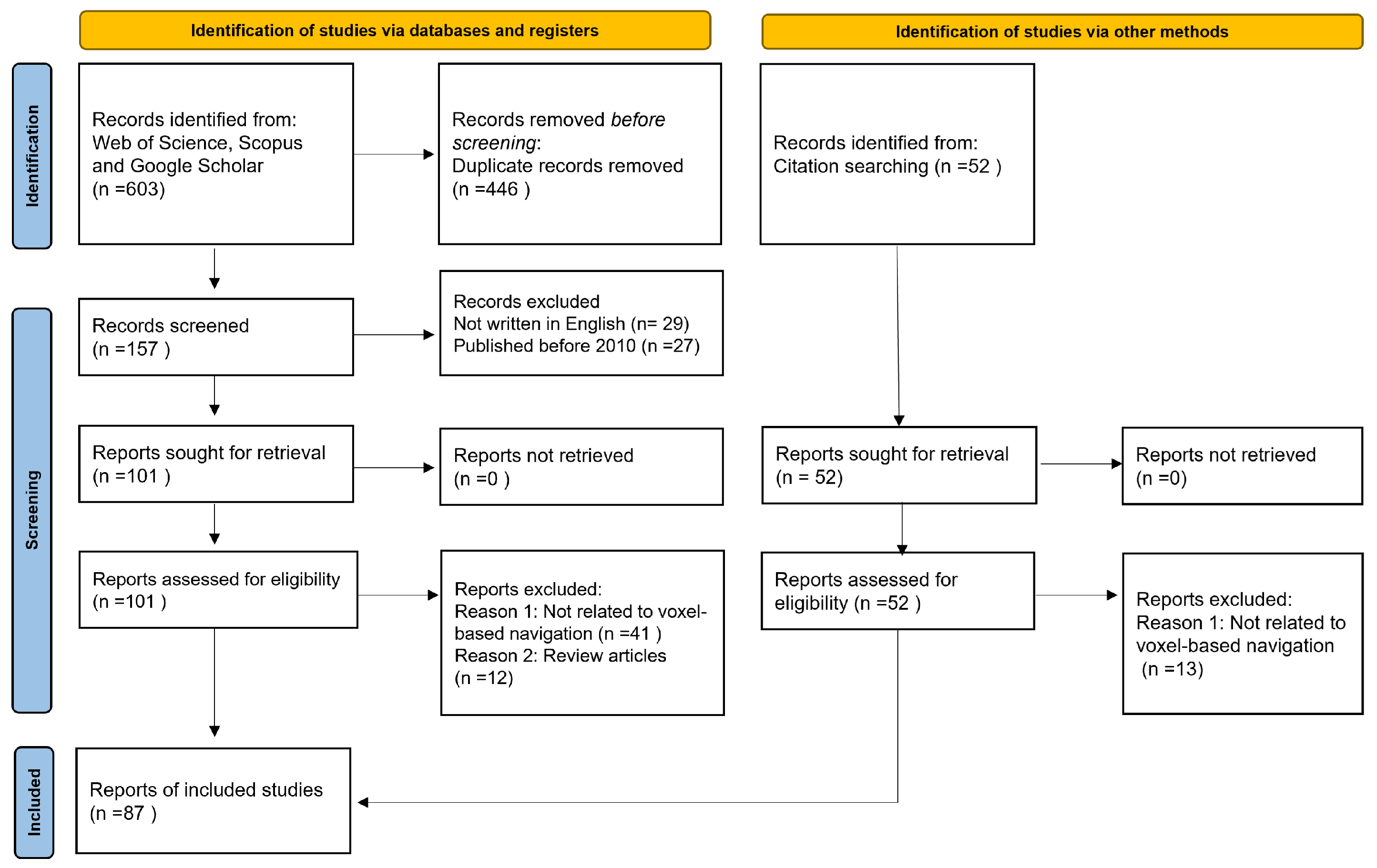
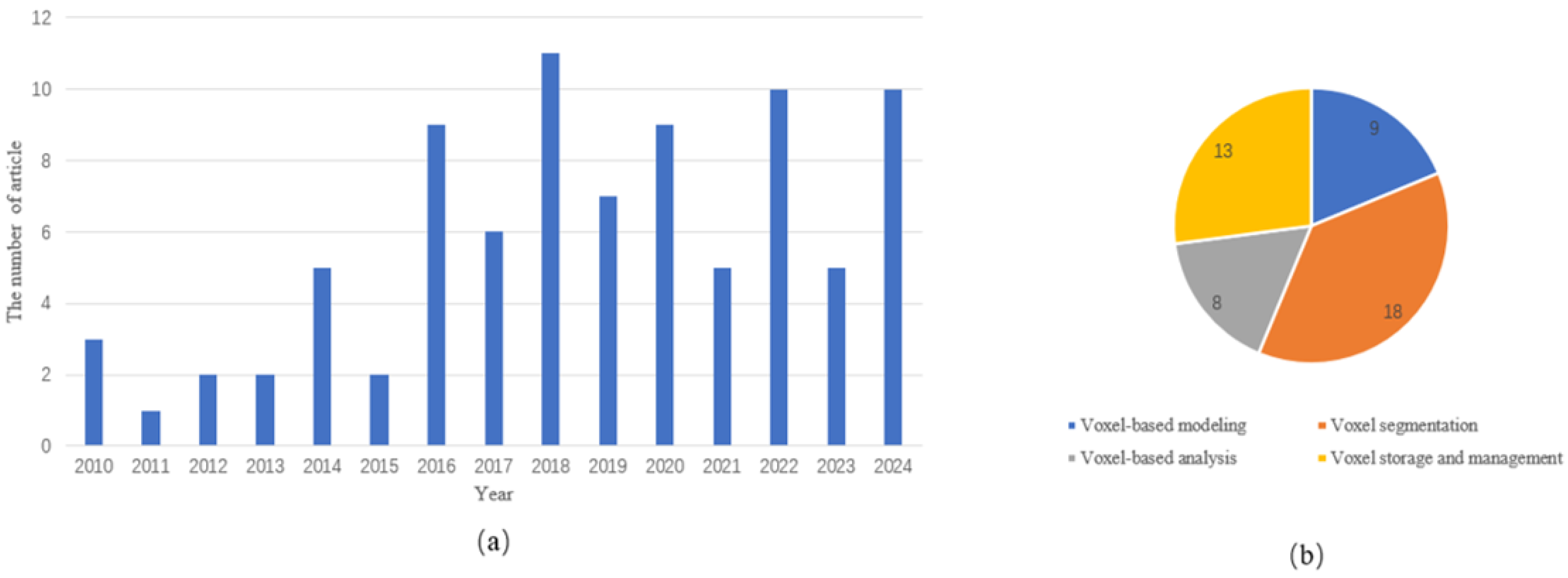

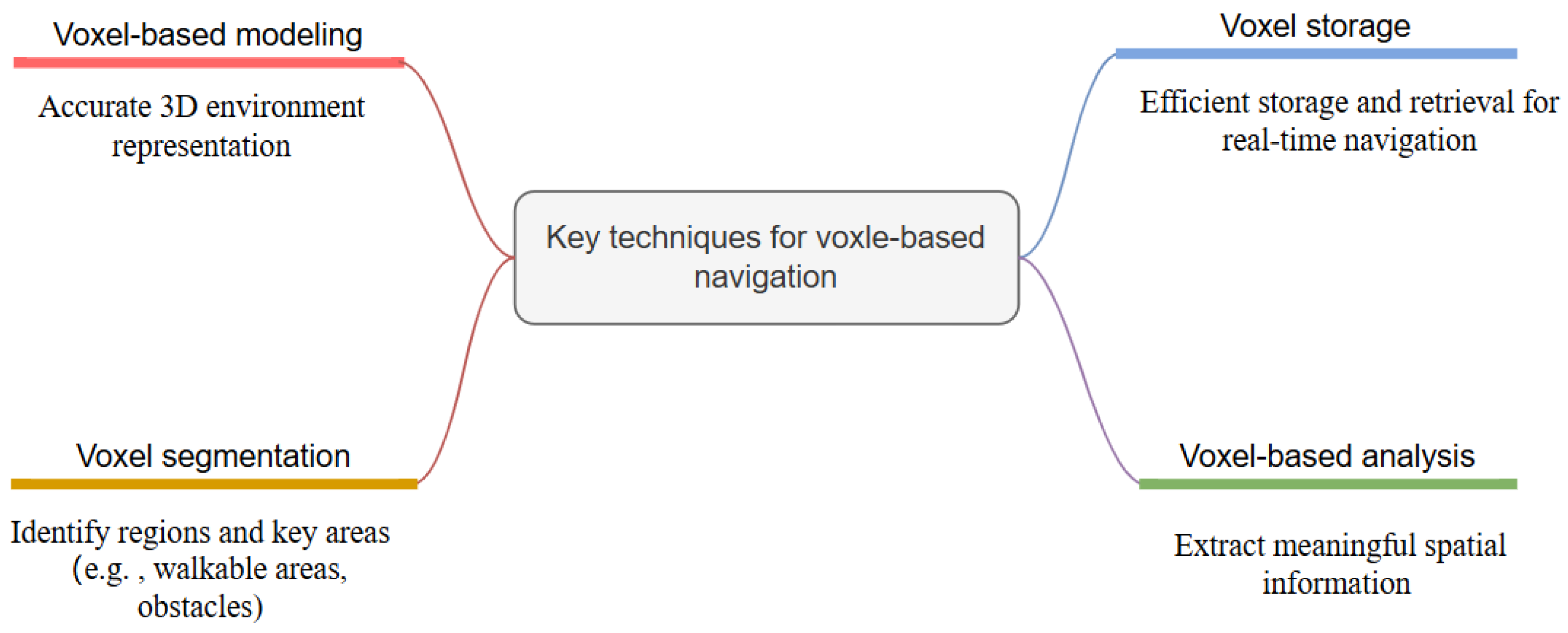
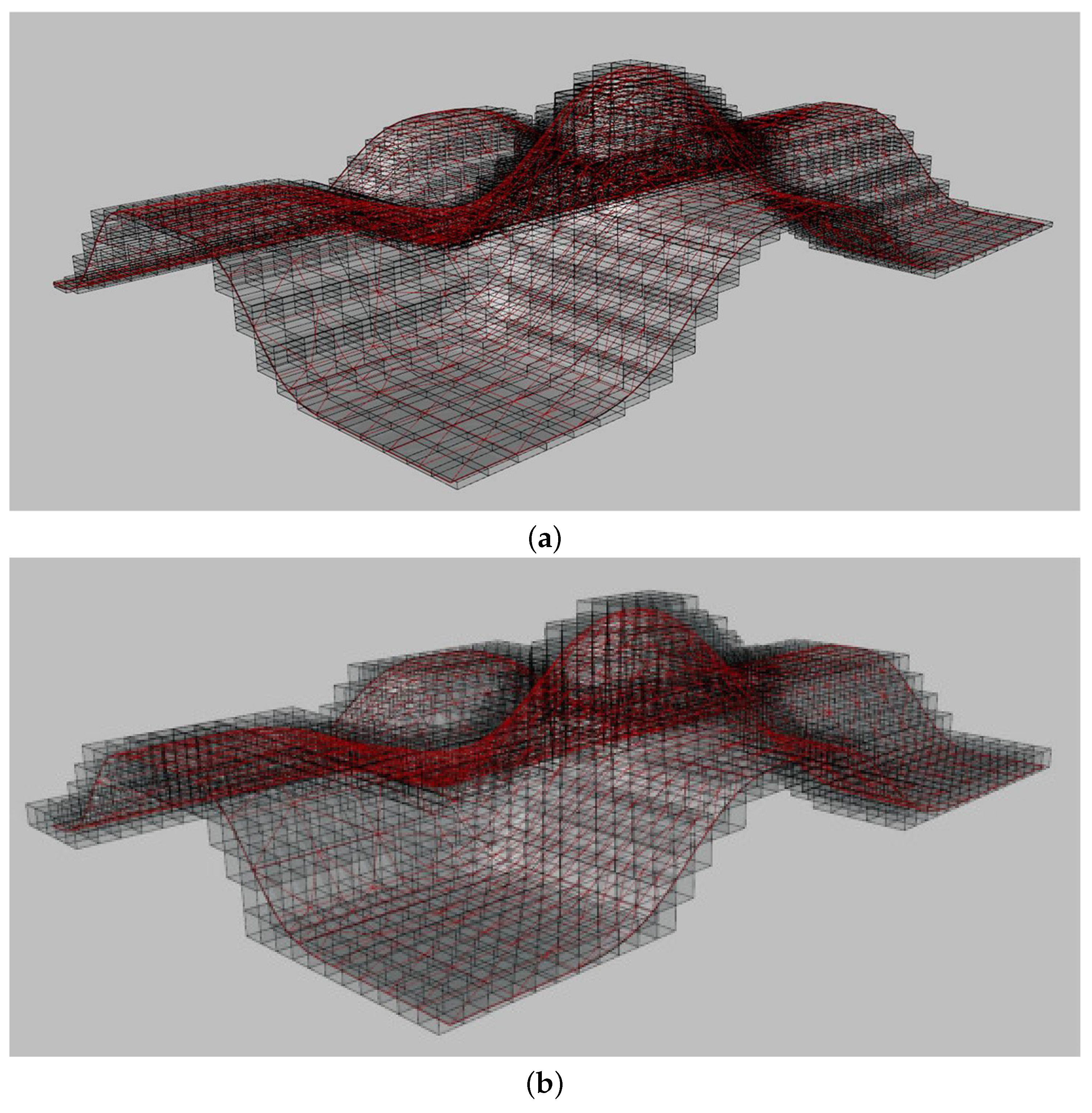
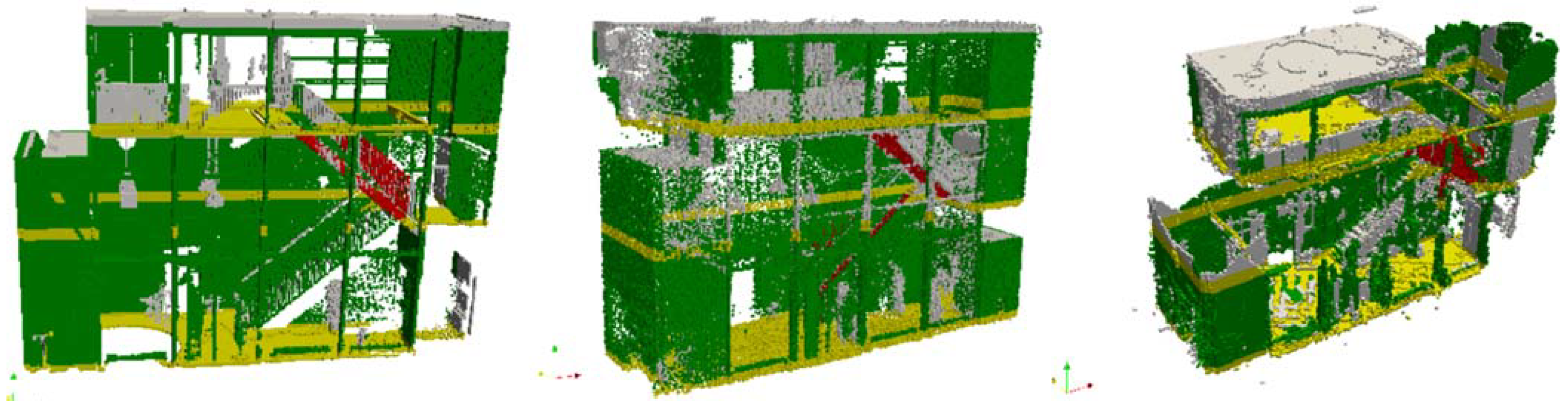
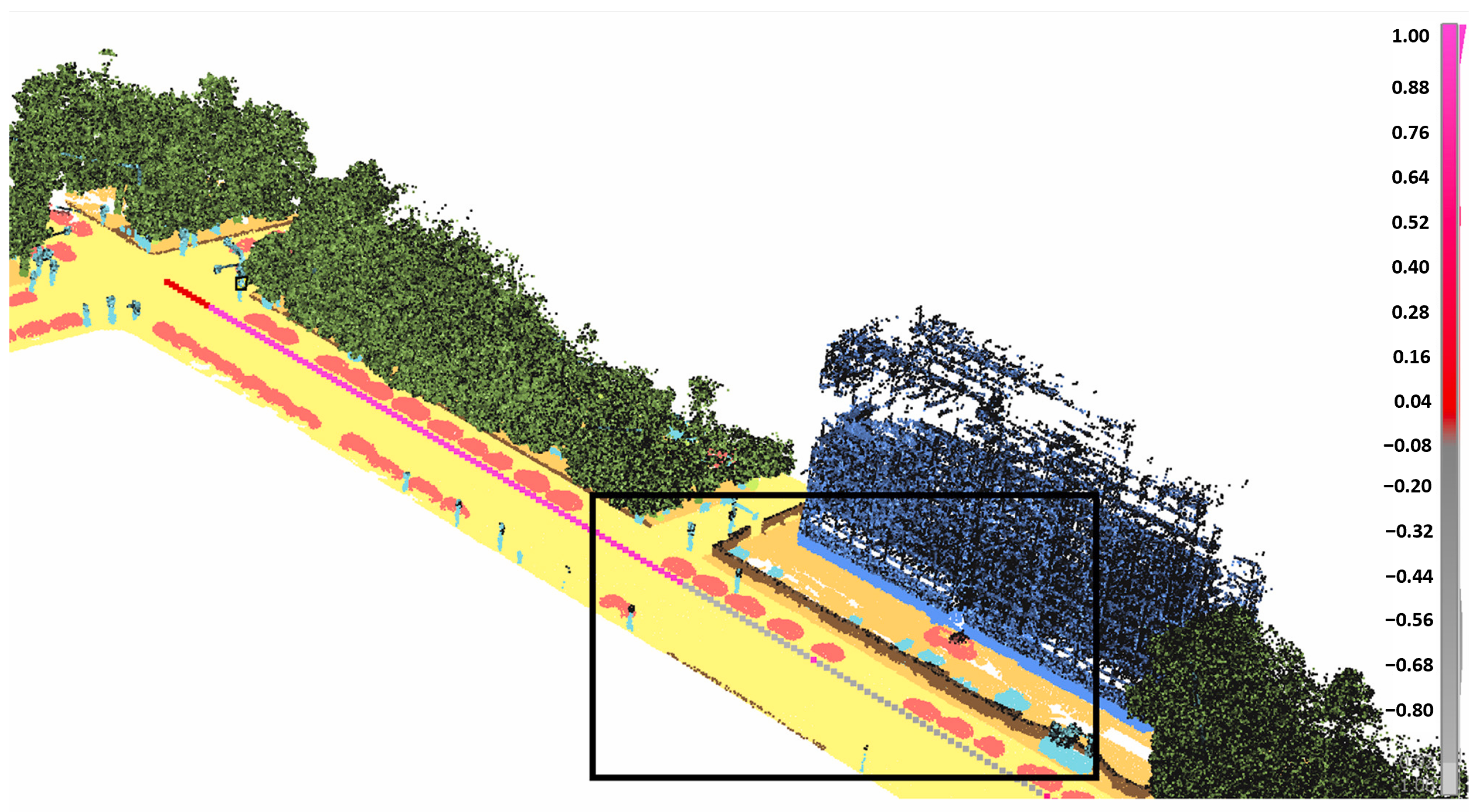
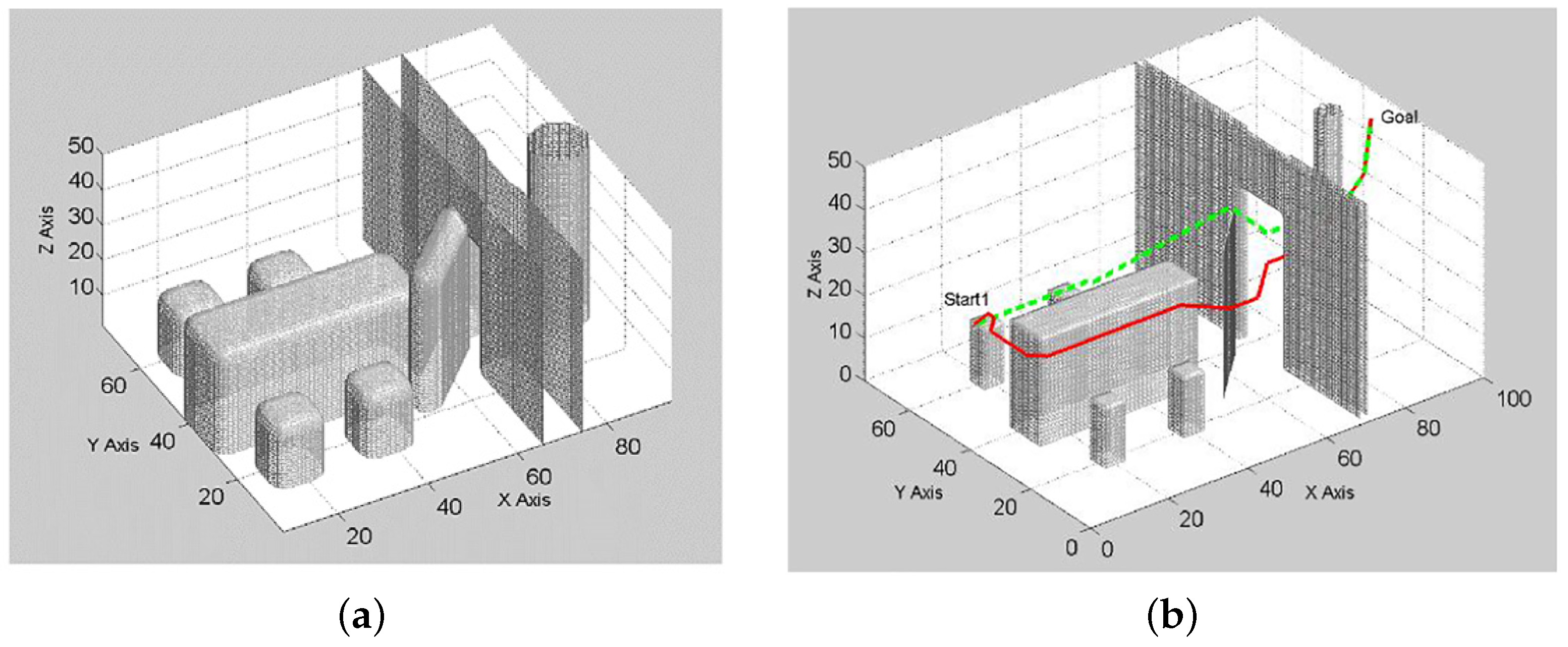
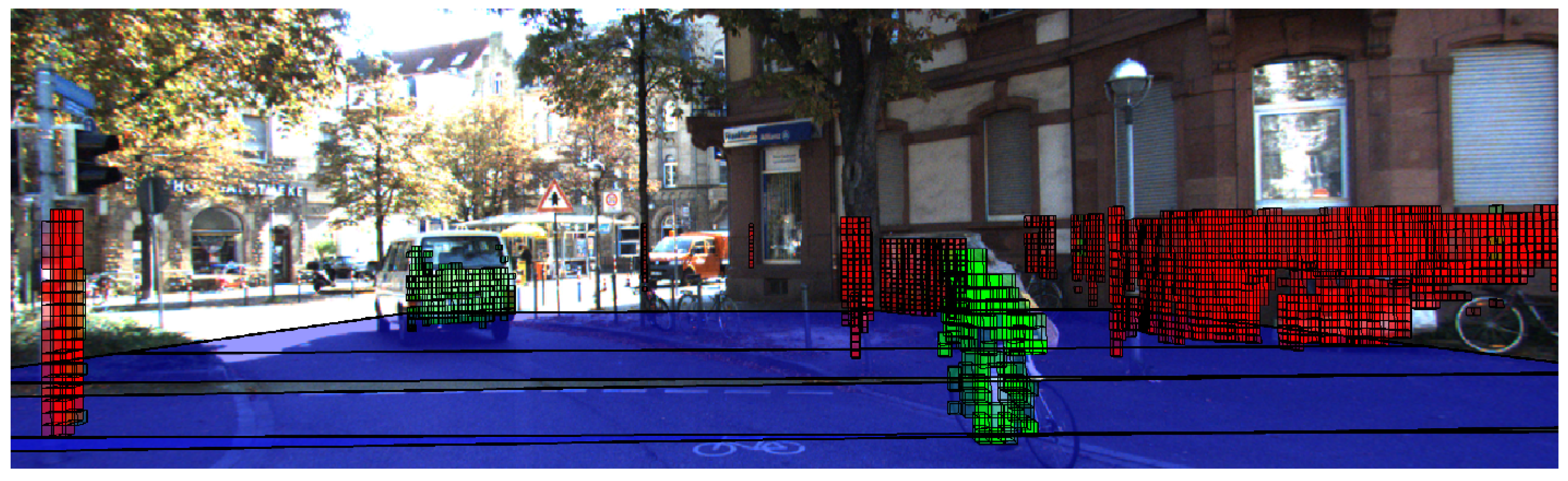

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}