

Batch Simplification Algorithm for Trajectories over Road Networks


Abstract
:1. Introduction
2. Related Work
- Douglas-Peucker: Performs point simplification accurately in terms of the spatial error metric. By taking a parameter error threshold, it ensures that the error of the simplified trajectory is within the bounds of the target application [37];
- TD-TR: By using the synchronous Euclidean distance for the calculations, this allows you to guarantee both a maximum spatial distance and a maximum temporal error distance;
- Window opening algorithm: Processing time is very low;
- ST-Trace: Uses the velocity and orientation of the trajectory points in the simplification step [38].
- Trajectories may contain outliers;
- The points of a trajectory may have a localization error.
- Douglas-Peucker: Only performs spatial analysis of the data;
- Visvalingam: The compression ratio is reduced and only performs spatial analysis;
- TD-TR: It presents a smaller margin of error in the trajectory simplification process and an acceptable compression ratio. A limitation is the processing time;
- Lang: Its point elimination method is trivial, so it discards points considered significant, increasing its margin of error;
- Window Aperture: Its main disadvantage is the frequent elimination or misrepresentation of important points such as acute angles. A secondary limitation is that straight lines are still over-represented. It requires high hardware performance for proper operation;
- ST-Trace: Processing time is considerable and requires velocity information to characterize the trace.
- None of the analyzed algorithms consider the noise present in the trajectory data, which reduces the possibility of eliminating points that are not significant during the simplification process;
- Only the Squish and Dots algorithms perform a rigorous analysis of the GPS trajectory decoding procedure, but do not consider the analysis of trajectory noise;
- Douglas Peucker, Visvalingam and Window opening only perform spatial analysis of the data. This removes temporal information that provides data of importance to achieve a better compression ratio;
- Visvalingam removes or misrepresents points, such as acute angles, so the resulting trajectory may lack important points for reconstructing a path;
- None of the algorithms consider network information in trajectory simplification, missing the opportunity to perform an analysis that allows more points of little significance to be discarded from the original trajectory.
3. Materials and Methods
3.1. Noise Reduction
- Prediction of the next state of the system;
- A priori covariance update;
- Kalman gain calculation;
- Estimation of the current state;
- Update of the a posteriori covariance.
Brief Description of Kalman Filter Application for Noise Reduction
3.2. Road Network Information
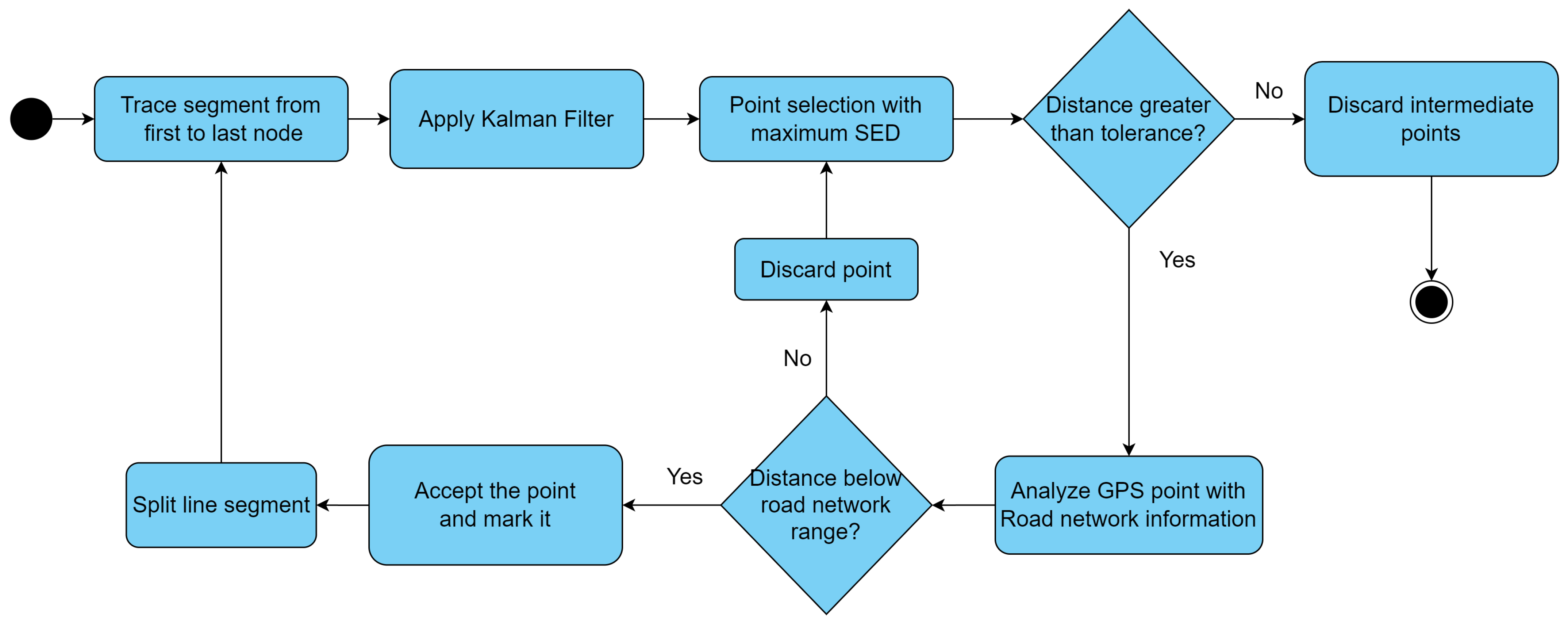
3.3. Simplification of GPS Points
Brief Description of the Application of Point Simplification with Road Network Analysis
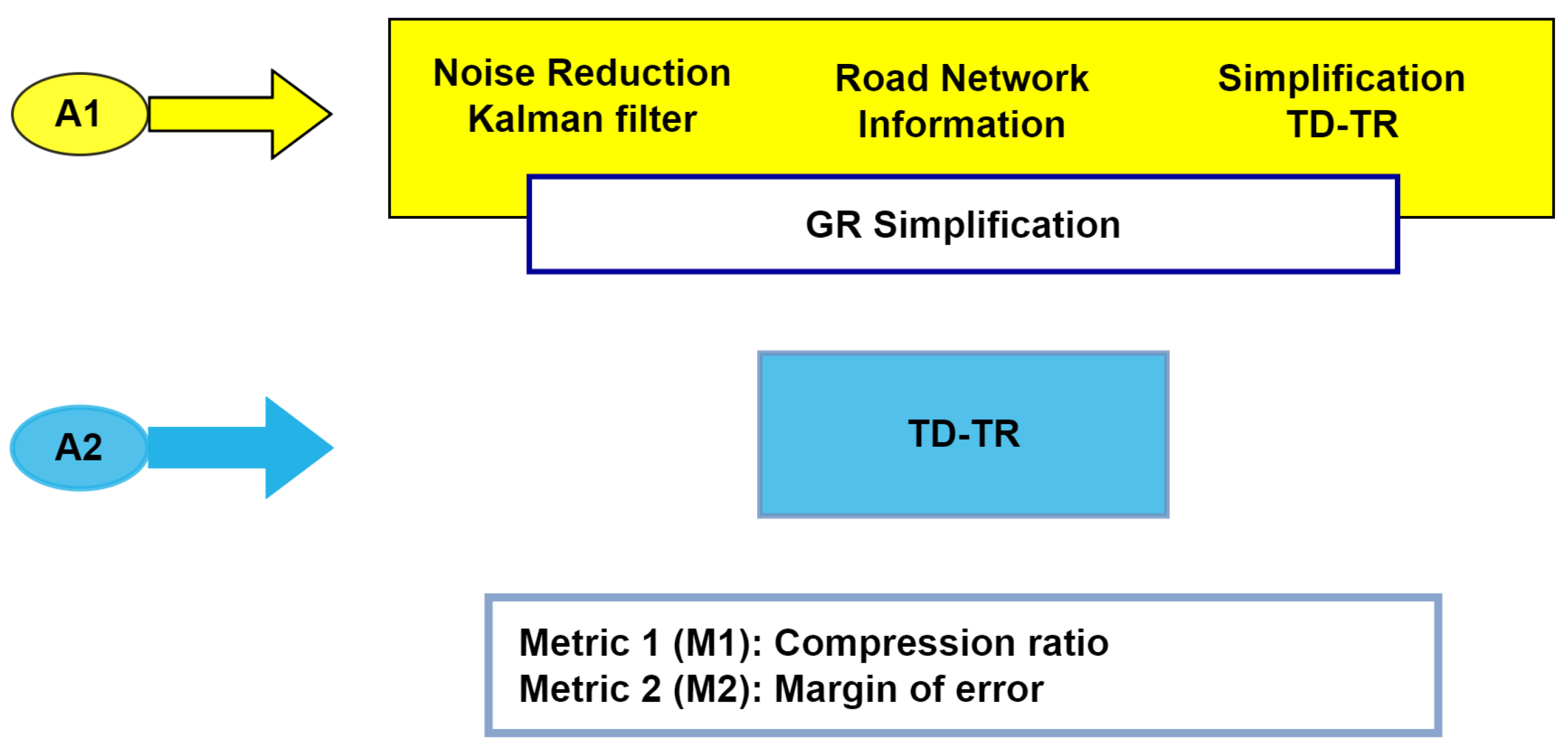
3.4. Initial Experiment
4. Results
4.1. Used Data
4.1.1. Geolife
4.1.2. Mobile Century
4.2. Initial Diagnostics of Batch GPS Trajectory Simplification Algorithms
- The Visvalingam algorithm shows the worst compression ratio rates, being a very unstable algorithm in its behavior before different data sets;
- The TD-TR algorithm is the second algorithm with the best compression ratio rate with an average of 86.01;
- Douglas-Peucker obtains the best results in terms of compression ratio, however the processing time is longer than TD-TR and the margin of error is also higher, being 13.88 km while TD-TR presents 0.80 km;
- The TD-TR algorithm is proposed in the literature as an improvement to the Douglas Peucker algorithm and presents better results in terms of margin of error and processing time.
4.3. Obtained Results from the GR Simplification Algorithm for GPS Trajectory Simplification
- Sample 1 (Geolife): three hundred and seventy-six trajectories, each containing between 1 and 18.924 points;
- Sample 2 (Mobile Century): three hundred and forty trajectories, each containing between 17 and 8.067 points.
5. Discussion
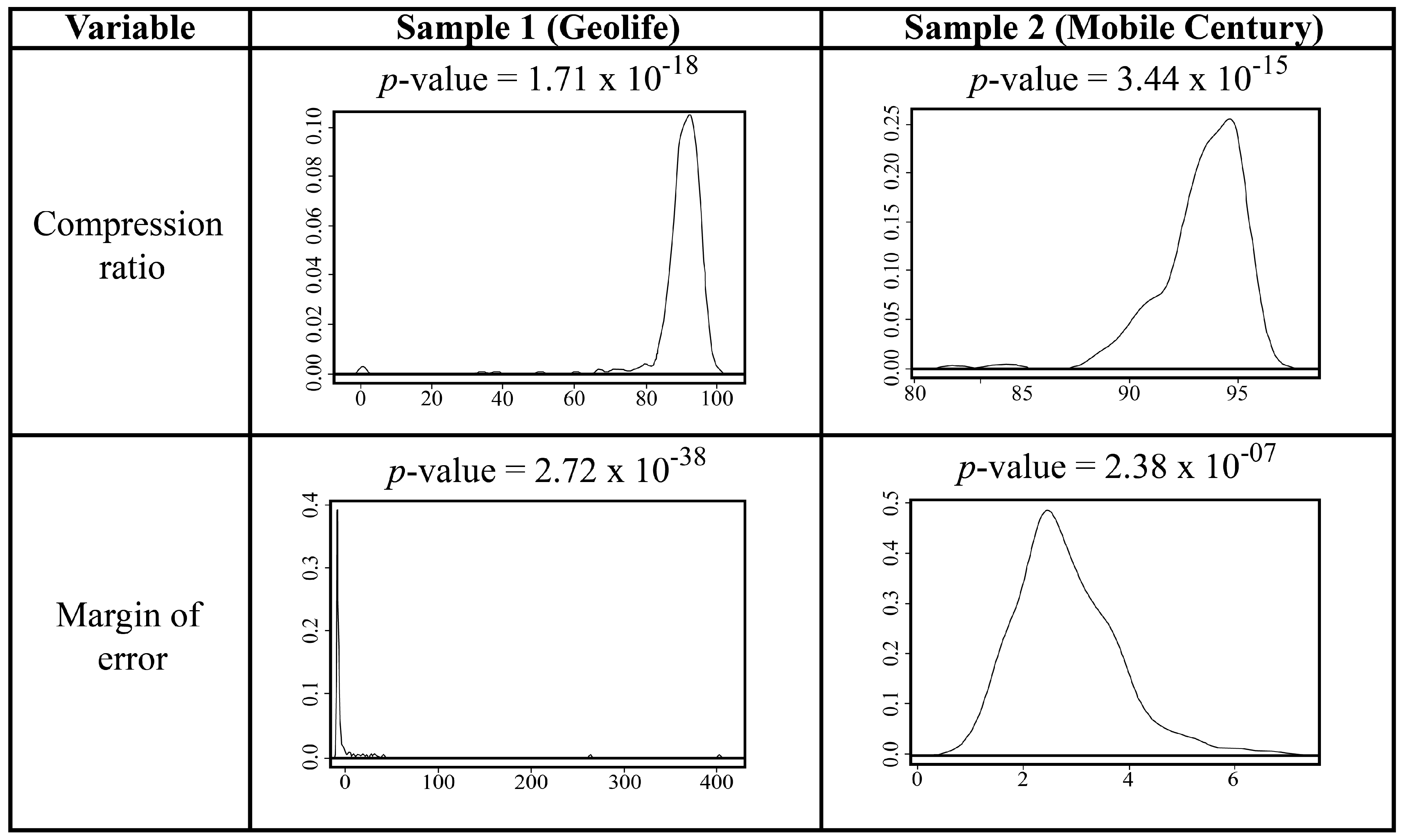
5.1. Assumption of Normality
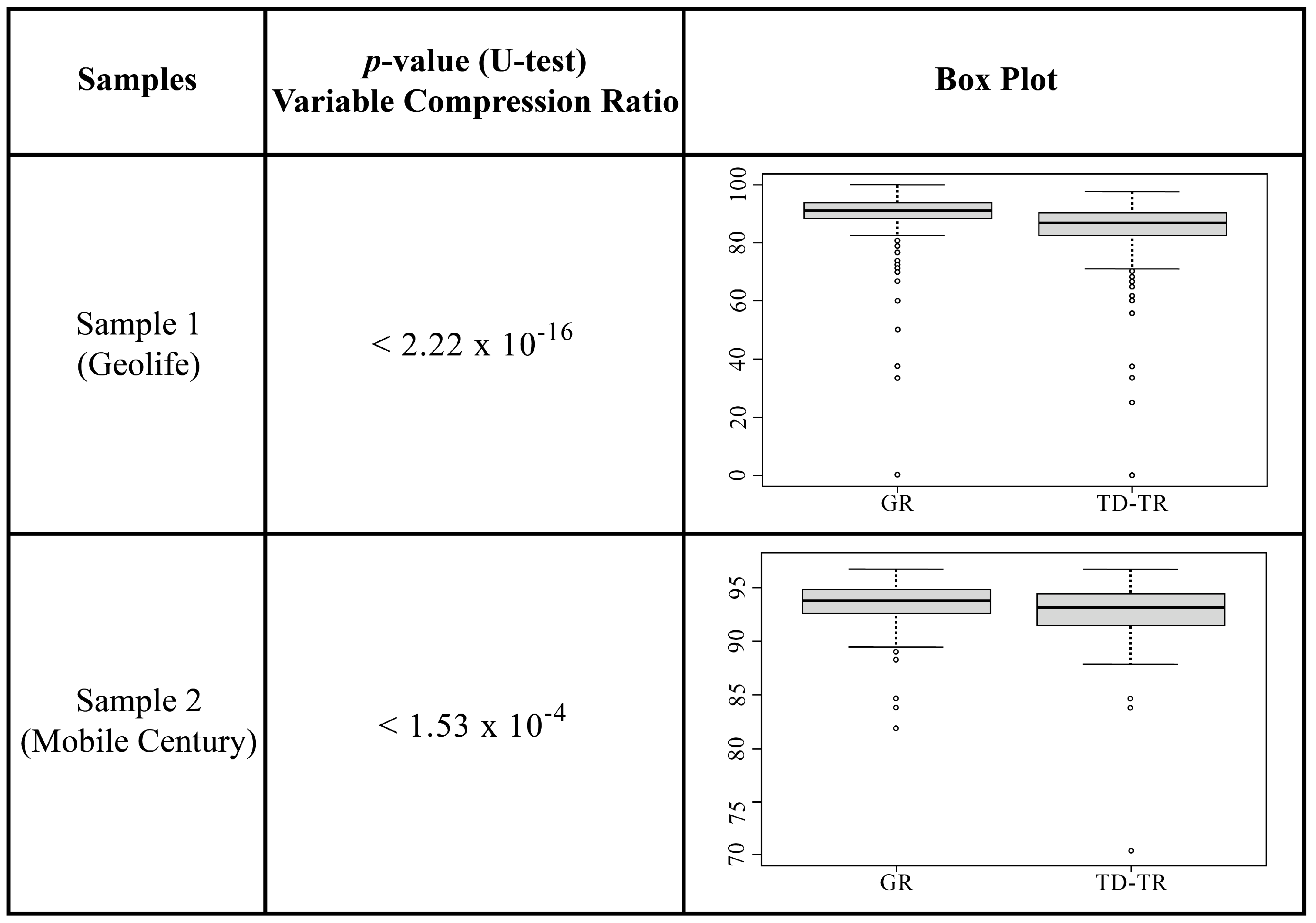
5.2. Analysis of Results for Compression Ratio Metric
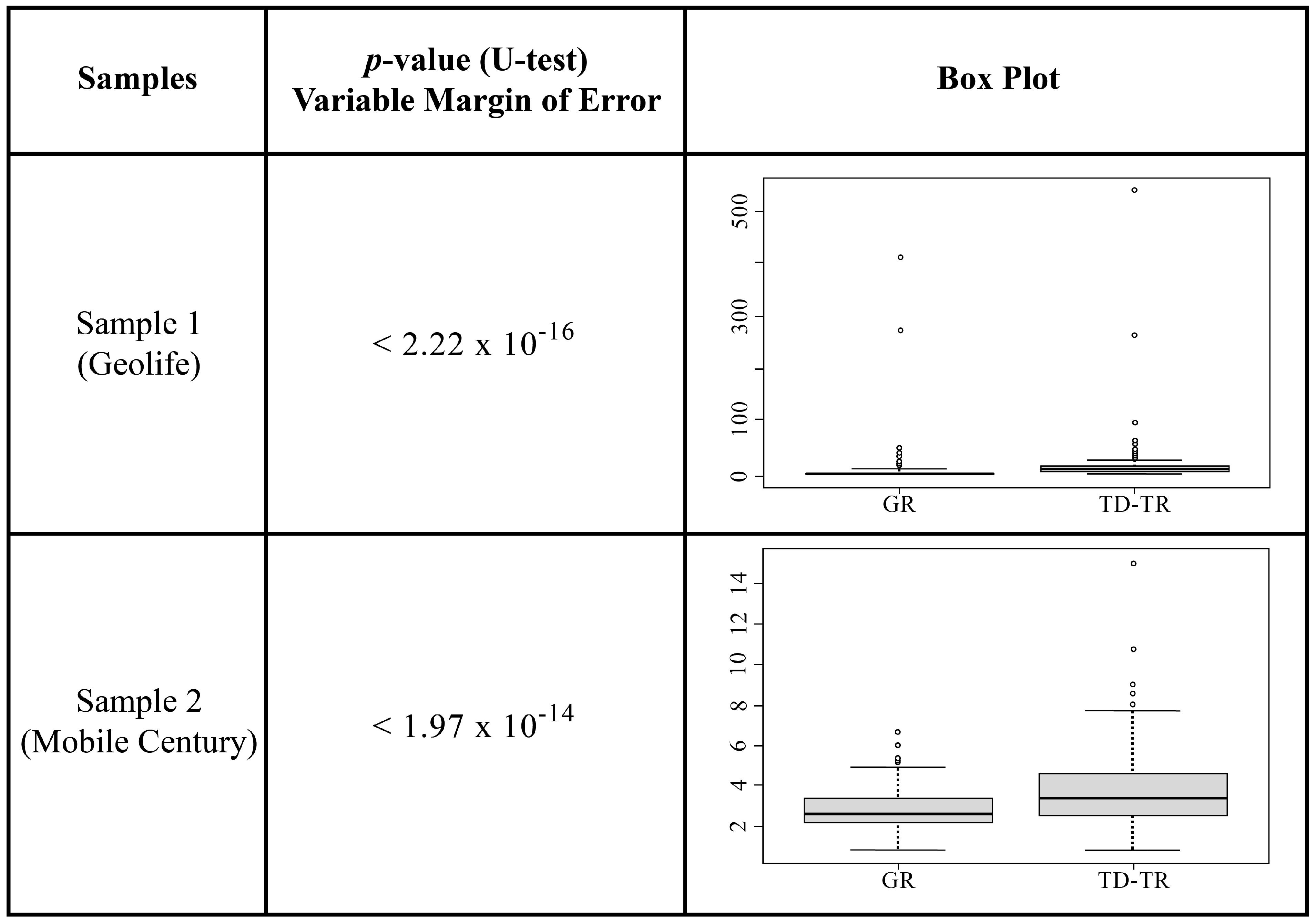
5.3. Analysis of Results for the Margin of Error Metric
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, H.; Wu, Z.; Chen, J.; Chen, L. Evaluation of road traffic noise exposure considering differential crowd characteristics. Transp. Res. Part D Transp. Environ. 2022, 105, 103250. [Google Scholar] [CrossRef]
- Chen, J.; Xu, M.; Xu, W.; Li, D.; Peng, W.; Xu, H. A Flow Feedback Traffic Prediction Based on Visual Quantified Features. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10067–10075. [Google Scholar] [CrossRef]
- Muckell, J.; Patil, V.; Ping, F.; Hwang, J.H.; Lawson, C.T.; Ravi, S.S. SQUISH: An online approach for GPS trajectory compression. In Proceedings of the 2nd International Conference and Exhibition on Computing for Geospatial Research & Application, Washington, DC, USA, 23–25 May 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Corcoran, P.; Mooney, P.; Huang, G. Unsupervised trajectory compression. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3126–3132. [Google Scholar] [CrossRef]
- Rana, R.; Yang, M.; Wark, T.; Chou, C.T.; Hu, W. Simpletrack: Adaptive trajectory compression with deterministic projection matrix for mobile sensor networks. IEEE Sens. J. 2015, 15, 365–373. [Google Scholar] [CrossRef]
- Trajcevski, G. Compression of Spatio-temporal Data. In Proceedings of the 2016 17th IEEE International Conference on Mobile Data Management (MDM), Porto, Portugal, 13–16 June 2016; pp. 4–7. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, P.; Chen, W.; Zheng, Z.; Guo, M. Embedding-Based Similarity Computation for Massive Vehicle Trajectory Data. IEEE Internet Things J. 2022, 9, 4650–4660. [Google Scholar] [CrossRef]
- Bashir, M.; Ashraf, J.; Habib, A.; Muzammil, M. An intelligent linear time trajectory data compression framework for smart planning of sustainable metropolitan cities. Trans. Emerg. Telecommun. Technol. 2022, 33, e3886. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Z.; Liu, D. An optimization model for the transportation network with hierarchical structure: The case of China Post. J. Ambient. Intell. Humaniz. Comput. 2019, 12, 167–182. [Google Scholar] [CrossRef]
- Richter, K.F.; Schmid, F.; Laube, P. Semantic trajectory compression: Representing urban movement in a nutshell. J. Spat. Inf. Sci. 2012, 4, 3–30. [Google Scholar] [CrossRef]
- Souza, J.C.S.D.; Assis, T.M.L.; Pal, B.C. Data Compression in Smart Distribution Systems via Singular Value Decomposition. IEEE Trans. Smart Grid 2017, 8, 275–284. [Google Scholar] [CrossRef]
- Muckell, J.; Olsen, P.W.; Hwang, J.H.; Lawson, C.T.; Ravi, S.S. Compression of trajectory data: A comprehensive evaluation and new approach. GeoInformatica 2014, 18, 435–460. [Google Scholar] [CrossRef]
- Nibali, A.; He, Z. Trajic: An Effective Compression System for Trajectory Data. IEEE Trans. Knowl. Data Eng. 2015, 27, 3138–3151. [Google Scholar] [CrossRef]
- Alowayr, A.D.; Alsalooli, L.A.; Alshahrani, A.M.; Akaichi, J. A review of trajectory data mining applications. In Proceedings of the 2021 International Conference of Women in Data Science at Taif University, WiDSTaif 2021, Taif, Saudi Arabia, 30–31 March 2021. [Google Scholar] [CrossRef]
- Mazimpaka, J.D.; Timpf, S. Trajectory data mining: A review of methods and applications. J. Spat. Inf. Sci. 2016, 2016, 61–99. [Google Scholar] [CrossRef]
- Ji, Y.; Liu, H.; Liu, X.; Ding, Y.; Luo, W. A comparison of road-network-constrained trajectory compression methods. In Proceedings of the 2016 IEEE 22nd International Conference on Parallel and Distributed Systems (ICPADS), Wuhan, China, 13–16 December 2016; pp. 256–263. [Google Scholar] [CrossRef]
- Ouyang, Z.; Xue, L.; Ding, F.; Li, D. PSOTSC: A Global-Oriented Trajectory Segmentation and Compression Algorithm Based on Swarm Intelligence. ISPRS Int. J. Geo-Inf. 2021, 10, 817. [Google Scholar] [CrossRef]
- Chen, H.; Chen, X. A Trajectory Ensemble-Compression Algorithm Based on Finite Element Method. ISPRS Int. J. Geo-Inf. 2021, 10, 334. [Google Scholar] [CrossRef]
- Song, J.; Miao, R. A Novel Evaluation Approach for Line Simplification Algorithms towards Vector Map Visualization. ISPRS Int. J. Geo-Inf. 2016, 5, 223. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory data mining: An overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–41. [Google Scholar] [CrossRef]
- Wang, S.; Zhong, E.; Li, K.; Song, G.; Cai, W. A Novel Dynamic Physical Storage Model for Vehicle Navigation Maps. ISPRS Int. J. Geo-Inf. 2016, 5, 53. [Google Scholar] [CrossRef]
- Amigo, D.; Pedroche, D.S.; García, J.; Molina, J.M. Review and classification of trajectory summarisation algorithms: From compression to segmentation. Int. J. Distrib. Sens. Netw. 2021, 17, 15501477211050729. [Google Scholar] [CrossRef]
- Salomon, D. Data Compression: The Complete Reference, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–1093. [Google Scholar] [CrossRef]
- Gudmundsson, J.; Katajainen, J.; Merrick, D.; Ong, C.; Wolle, T. Compressing spatio-temporal trajectories. Comput. Geom. Theory Appl. 2009, 42, 825–841. [Google Scholar] [CrossRef]
- Lv, C.; Chen, F.; Xu, Y.; Song, J.; Lv, P. A trajectory compression algorithm based on non-uniform quantization. In Proceedings of the 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; pp. 2469–2474. [Google Scholar] [CrossRef]
- Liu, D.; Wang, T.; Li, X.; Ni, Y.; Li, Y.; Jin, Z. A Multiresolution Vector Data Compression Algorithm Based on Space Division. ISPRS Int. J. Geo-Inf. 2020, 9, 721. [Google Scholar] [CrossRef]
- Meratnia, N.; Rolf, A.; ITC, E. A New Perspective on Trajectory Compression Techniques; International Society for Photogrammetry and Remote Sensing (ISPRS): Quebec City, QC, Canada, 2003; pp. 2–3. [Google Scholar]
- Zheng, Y.; Zhou, X. Computing with Spatial Trajectories; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1–306. [Google Scholar] [CrossRef]
- Lin, X.; Ma, S.; Zhang, H.; Wo, T.; Huai, J. One-pass error bounded trajectory simplification. Proc. VLDB Endow. 2017, 10, 841–852. [Google Scholar] [CrossRef]
- Feldman, D.; Sugaya, A.; Rus, D. An effective coreset compression algorithm for large scale sensor networks. In Proceedings of the 2012 ACM/IEEE 11th International Conference on Information Processing in Sensor Networks (IPSN), Beijing, China, 16–20 April 2012; pp. 257–268. [Google Scholar] [CrossRef]
- Wang, Z.; Long, C.; Cong, G.; Zhang, Q. Error-Bounded Online Trajectory Simplification with Multi-Agent Reinforcement Learning. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Singapore, 14–18 August 2021; pp. 1758–1768. [Google Scholar] [CrossRef]
- Li, S.; Zhang, K.; Yin, H.; Yin, D.; Zu, H.; Gao, H. ROPW: An Online Trajectory Compression Algorithm. Lect. Notes Comput. Sci. 2021, 12680 LNCS, 16–28. [Google Scholar] [CrossRef]
- Hendawi, A.M.; Khot, A.; Rustum, A.; Basalamah, A.; Teredesai, A.; Ali, M. A Map-Matching Aware Framework for Road Network Compression. In Proceedings of the 2015 16th IEEE International Conference on Mobile Data Management, Pittsburgh, PA, USA, 15–18 June 2015; Volume 1, pp. 307–310. [Google Scholar] [CrossRef]
- Hussain, S.A.; Hassan, M.U.; Nasar, W.; Ghorashi, S.; Jamjoom, M.M.; Abdel-Aty, A.H.; Parveen, A.; Hameed, I.A. Efficient Trajectory Clustering with Road Network Constraints Based on Spatiotemporal Buffering. ISPRS Int. J. Geo-Inf. 2023, 12, 117. [Google Scholar] [CrossRef]
- Song, R.; Sun, W.; Zheng, B.; Zheng, Y. A novel framework of trajectory compression in road networks. Proc. VLDB Endow. 2014, 7, 661–672. [Google Scholar] [CrossRef]
- Hunnik, R.V. Extensive Comparison of Trajectory Simplification Algorithms. Master’s Thesis, Utrecht University, Utrecht, The Netherlands, 2017; pp. 1–22. [Google Scholar]
- Lin, C.Y.; Hung, C.C.; Lei, P.R. A velocity-preserving trajectory simplification approach. In Proceedings of the 2016 Conference on Technologies and Applications of Artificial Intelligence (TAAI), Hsinchu, Taiwan, 25–27 November 2016; pp. 58–65. [Google Scholar] [CrossRef]
- Kellaris, G.; Pelekis, N.; Theodoridis, Y. Trajectory Compression under Network Constraints; Springer: Berlin/Heidelberg, Germany, 2009; pp. 392–398. [Google Scholar] [CrossRef]
- Gomez-Gil, J.; Ruiz-Gonzalez, R.; Alonso-Garcia, S.; Gomez-Gil, F.J. A Kalman filter implementation for precision improvement in Low-Cost GPS positioning of tractors. Sensors 2013, 13, 15307–15323. [Google Scholar] [CrossRef] [PubMed]
- Ivanov, R. Real-time GPS track simplification algorithm for outdoor navigation of visually impaired. J. Netw. Comput. Appl. 2012, 35, 1559–1567. [Google Scholar] [CrossRef]
- Chen, C.; Ding, Y.; Guo, S.; Wang, Y. DAVT: An Error-Bounded Vehicle Trajectory Data Representation and Compression Framework. IEEE Trans. Veh. Technol. 2020, 69, 10606–10618. [Google Scholar] [CrossRef]
- Meratnia, N.; By, R.A.D. Spatiotemporal compression techniques for moving point objects. Lect. Notes Comput. Sci. 2004, 2992, 765–782. [Google Scholar] [CrossRef]
- Whyatt, J.D.; Wade, P.R. The Douglas-Peucker line simplification algorithm. Bull. Soc. Univ. Cartogr. 1988, 22, 17–25. [Google Scholar]
- Visvalingam, M.; Whyatt, J.D. Line generalisation by repeated elimination of points. Cartogr. J. 1993, 30, 46–51. [Google Scholar] [CrossRef]
- Buchin, M.; Driemel, A.; Van Kreveld, M.; Sacristan, V. Segmenting trajectories: A framework and algorithms using spatiotemporal criteria. J. Spat. Inf. Sci. 2011, 3, 33–63. [Google Scholar] [CrossRef]
- Bach, T.; Li, T.; Huang, R.; Chen, L.; Jensen, C.S.; Pedersen, T.B. Compression of Uncertain Trajectories in Road Networks. PVLDB 2020, 13, 1050–1063. [Google Scholar] [CrossRef]
- Weiss, R.; Weibel, R. Road network selection for small-scale maps using an improved centrality-based algorithm. J. Spat. Inf. Sci. 2014, 31, 71–99. [Google Scholar] [CrossRef]
- Koegel, M.; Baselt, D.; Mauve, M.; Scheuermann, B. A comparison of vehicular trajectory encoding techniques. In Proceedings of the 2011 The 10th IFIP Annual Mediterranean Ad Hoc Networking Workshop, Favignana Island, Italy, 12–15 June 2011; pp. 87–94. [Google Scholar] [CrossRef]
- Lawson, C.T. Compression and Mining of GPS Trace Data: New Techniques and Applications. In Final Report: Region II University Transportation Research Center; City University of New York, University Transportation Research Center: New York, NY, USA, 2011; pp. 1–25. [Google Scholar]
- Reyes, G. Algoritmo de Compresión de Trayectorias GPS Basado en el Algoritmo Top Down Time Ratio (TD-TR). In Proceedings of the 2017 V Congreso Científico Internacional, Tecnología Universidad Sociedad, Samborondón, Ecuador, 8–10 November 2017; pp. 194–204. Available online: https://www.ecotec.edu.ec/content/uploads/investigacion/tus/2017-memorias-TUS.pdf (accessed on 24 January 2022).
- Reyes, G.; Estrada, V. Comparison Analysis On Noise Reduction In Gps Trajectories Simplification; Latin American and Caribbean Consortium of Engineering Institutions: Boca Raton, FL, USA, 2021. [Google Scholar] [CrossRef]
- Lin, K.; Xu, Z.; Qiu, M.; Wang, X.; Han, T. Noise filtering, trajectory compression and trajectory segmentation on GPS data. In Proceedings of the 2016 11th International Conference on Computer Science & Education (ICCSE), Nagoya, Japan, 23–25 August 2016; pp. 490–495. [Google Scholar] [CrossRef]
- Reyes, G.; Crespo, C.; León-Granizo, O.; Bazán, W.; Horta, R. Propuesta de método de extracción de ubicaciones georreferenciales de una red de carreteras para el análisis de trayectorias GPS Proposal for a method to extract georeferenced locations from a road network for the analysis of GPS trajectories. Investig. Tecnol. Innov. 2022, 14, 1–15. [Google Scholar]
- Fenn, R. Spherical Geometry. In Geometry; Springer: London, UK, 2001; pp. 253–285. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, L.; Xie, X.; Ma, W.Y. Mining Interesting Locations and Travel Sequences From GPS Trajectories. In Proceedings of the 2009 Proceedings of the 18th International Conference on World Wide Web, Madrid, Spain, 20–24 April 2009; pp. 791–800. [Google Scholar] [CrossRef]
- Herrera, J.; Work, D.; Herring, R.; Ban, X.; Jacobson, Q.; Bayen, A. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. C Emerg. Technol. 2010, 18, 568–583. [Google Scholar] [CrossRef]
- Reyes, G.; Maquilón, V.; Estrada, V. Relationships of Compression Ratio and Error in Trajectory Simplification Algorithms; Springer International Publishing: Cham, Switzerland, 2021; pp. 140–155. [Google Scholar]
- Muckell, J.; Olsen, P.W.; Hwang, J.H.; Ravi, S.S.; Lawson, C.T. A framework for efficient and convenient evaluation of trajectory compression algorithms. In Proceedings of the 2013 Fourth International Conference on Computing for Geospatial Research and Application, San Jose, CA, USA, 22–24 July 2013; pp. 24–31. [Google Scholar] [CrossRef]
- Liu, M.; He, G.; Long, Y. A Semantics-Based Trajectory Segmentation Simplification Method. J. Geovis. Spat. Anal. 2021, 5, 19. [Google Scholar] [CrossRef]
- Tapia, C.; Flores, K. Pruebas para comprobar la normalidad de datos en procesos productivos: Anderson-Darling, Ryan-Joiner, Shapiro-Wilk y Kologórov-Smirnov. Soc. Rev. Cienc. Soc. Hum. 2021, 23, 83–97. [Google Scholar]
- Saldaña, M.R. Contraste de Hipótesis Comparación de dos medias independientes mediante pruebas no paramétricas: Prueba U de Mann-Whitney - Dialnet. Rev. EnfermeríaTrab. 2013, 3, 77–84. [Google Scholar]
- Guillen, A.; A Araiza, L.; Cerna, E.; Valenzuela, J.; Uanl, J.L.; Nicolás, S.; Coah, S. Métodos No-Paramétricos de Uso Común ( Non Parametric Methods of Common Usage ). DAENA Int. J. Good Conscienc. 2012, 7, 132–155. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Hypothesis | Used Method | Compression Behavior |
|---|---|---|---|
| A Trajectory Compression Algorithm Based on Non-uniform Quantization (2015) | Large volume of spatiotemporal trajectory data generates high overhead for data storage, transmission and processing. | An algorithm for trajectory compression based on non-uniform quantization is employed. | Improved compression ratio when processing large-scale trajectory data and in a geographical context. |
| Improvement of OPW-TR Algorithm for Compressing GPS Trajectory Data (2017) | A compression algorithm can reduce the size of trajectory data and minimize information loss. | An improved algorithm for open window time ratio (OPW-TR). | The errors of the algorithm are smaller than existing algorithms in terms of SED. |
| A Heading Maintaining Oriented Compression Algorithm for GPS Trajectory Data (2019) | Compression of trajectory data considering heading up to a maximum spatial error achieves more accurate approximation. | A heading-oriented trajectory compression algorithm takes into account position and heading information. | The algorithm can guarantee some effect on heading information and is more flexible. |
| Simplified Algorithm of Moving Object Trajectory Based on Interval Floating (2022) | Simplified Algorithm of Moving Object Trajectory Based on Interval Floating. | Techniques such as angular deviation, the sum of angular deviations, threshold evaluations. | The algorithm has an improved simplification rate with some simplification error. |
| AIS Trajectories Simplification Algorithm Considering Topographic Information (2022) | A novel algorithm that simplifies AIS trajectories considering topographic information is proposed. | Improved Douglas-Peucker algorithm using quadtree of random polygon maps. | Simplified trajectories without intersections were produced with superior computational efficiency. |
| Phases | Description | Number of Points | Size in Disc of the Trajectory Result |
|---|---|---|---|
| Original trajectory | Trajectory without any processing | 8067 | 668 kb |
| Simplification phase | Simplification, Kalman filter and road network information | 578 | 47 kb |
| Algorithm | Processing Time (Seconds) | Compression Ratio (Percentage) | Margin of Error (Kilometers) |
|---|---|---|---|
| Douglas-Peucker | 15,011.75 | 91.60 | 13.88 |
| Lang | 3159.65 | 76.19 | 4.75 |
| Visvalingam | 214.70 | 67.07 | 0.09 |
| TD-TR | 13,852.44 | 86.01 | 0.80 |
| Compression Ratio (Percentage) | Margin of Error (Meters) | |||
|---|---|---|---|---|
| TD-TR | GR | TD-TR | GR | |
| Sample 1 (Geolife) | 85.485 | 90.214 | 14.22 | 6.47 |
| Sample 2 (Mobile Century) | 92.787 | 93.395 | 3.69 | 2.77 |
| Average | 89.136 | 91.804 | 8.955 | 4.62 |
| Algorithms | Geolife | Mobile Century |
|---|---|---|
| TD-TR | 6982.980 | 1734.965 |
| GR | 4074.080 | 1666.680 |
| Tests | GR (Ratio of Compression) | GR (Margin of Error) | TD-TR (Ratio of Compression) | TD-TR (Margin of Error) |
|---|---|---|---|---|
| Sample 1 (Geolife) | Rejected | Rejected | Rejected | Rejected |
| Sample 2 (Mobile Century) | Rejected | Rejected | Rejected | Rejected |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reyes, G.; Estrada, V.; Tolozano-Benites, R.; Maquilón, V. Batch Simplification Algorithm for Trajectories over Road Networks. ISPRS Int. J. Geo-Inf. 2023, 12, 399. https://doi.org/10.3390/ijgi12100399
Reyes G, Estrada V, Tolozano-Benites R, Maquilón V. Batch Simplification Algorithm for Trajectories over Road Networks. ISPRS International Journal of Geo-Information. 2023; 12(10):399. https://doi.org/10.3390/ijgi12100399
Chicago/Turabian StyleReyes, Gary, Vivian Estrada, Roberto Tolozano-Benites, and Victor Maquilón. 2023. "Batch Simplification Algorithm for Trajectories over Road Networks" ISPRS International Journal of Geo-Information 12, no. 10: 399. https://doi.org/10.3390/ijgi12100399
APA StyleReyes, G., Estrada, V., Tolozano-Benites, R., & Maquilón, V. (2023). Batch Simplification Algorithm for Trajectories over Road Networks. ISPRS International Journal of Geo-Information, 12(10), 399. https://doi.org/10.3390/ijgi12100399