

Domain Constraints-Driven Automatic Service Composition for Online Land Cover Geoprocessing



Abstract
1. Introduction
2. Related Work
2.1. Automatic Geoprocessing Service Composition Method
2.2. Constraints in Geoprocessing Service Composition
3. Methodology
3.1. Concept Definition for Land Cover Service Composition
3.2. Land Cover Service Ontology and Domain Constraint Representation
3.3. Constraint-Aware GraphPlan Algorithm
3.3.1. Constructing the Land Cover Semantic Service Planning Graph
| Algorithm 1. Forward Search |
| Input: InReq, OutExp, O: Service Ontology, C: Logic Process Constraints Output: SG: Semantic Service Planning Graph 1: A = ; P= {InReq}; SG = {A, P}; 2: S = GetOntService(O); 3: if InReq is statisfied C then 4: for each w in S do: 5: if w is statisfied C then 6: A = A{w}; 7: P = P{w.Out}; 8: end if 9: end for 10: end if 11: repeat 12: for each w in S do: 13: if w.In ⊆ P and w is statisfied C then 14: A = A{w}; 15: P = P{w.Out}; 16: end if 17: end for 18: SG = SG{A, P}; 19: until OutExp P G is statisfied C.process Fixedpoint(SG); |
3.3.2. Service Composition Based on an Improved A* Algorithm
| Algorithm 2. Backward Search |
| Input: G: Planning Graph, InReq, OutExp Output: SrvSet: Service Set 1: openSet = {OutExp}; closeSet = ; SrvSet = ; currentSet = {OutExp}; 2: while openSet do 3: currentSet = openSet.getMinCostSevices(); 4: if openSet.contain(InReq) 5: SrvSet.add(InReq); 6: return SrvSet; 7: end if 8: openSet.remove(currentSet); 9: closeSet.add(currentSet); 10: SrvSet.add(currentSet); 11: for each next in G.getNeibors(currentSet) do: 12: if next in closeSet then 13: continue; 14: end if 15: if next not in openSet then 16: openSet.add(next); 17: next.calValue(); 18: end if 19: end for 20: end while |
4. Evaluation and Implementation
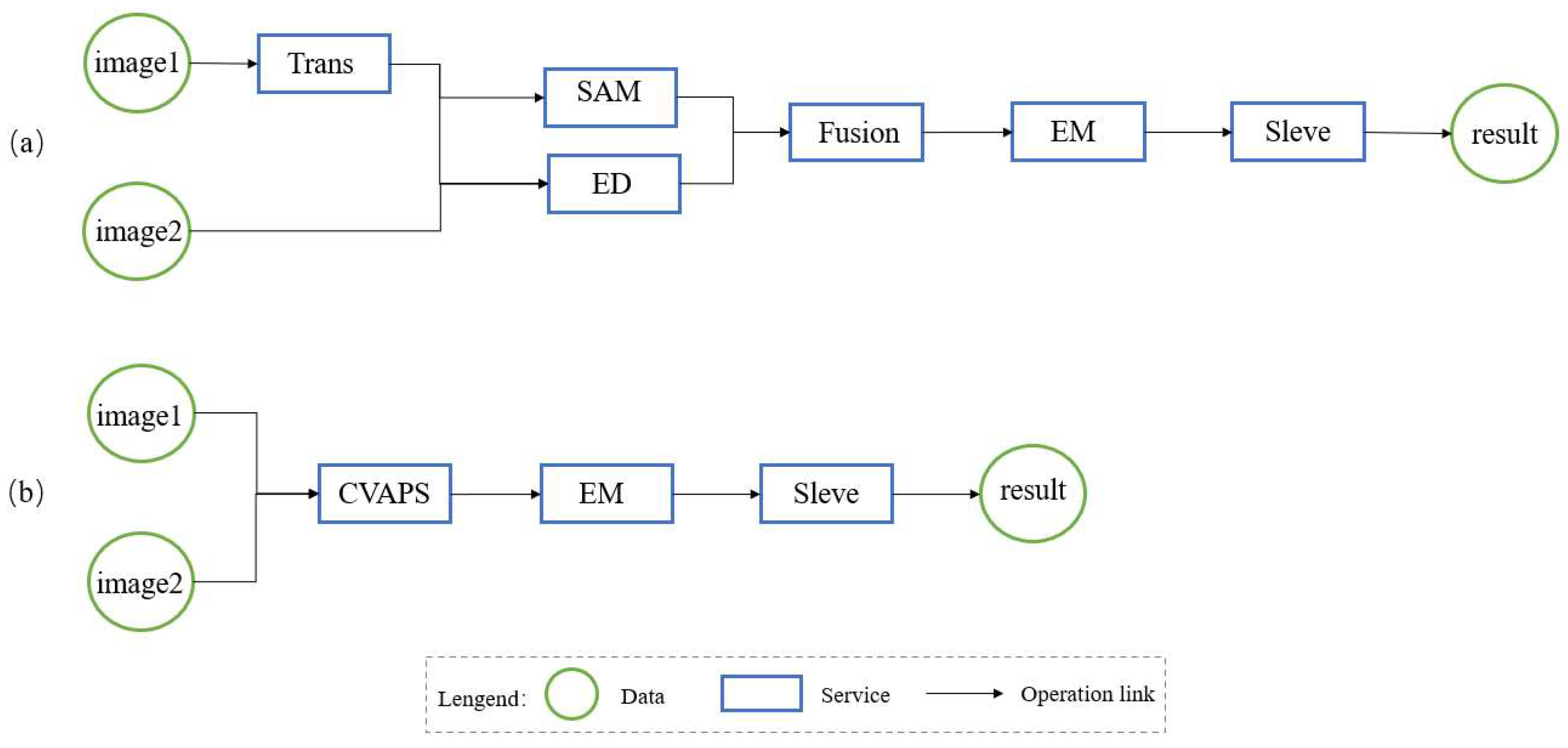
4.1. Evaluation of the Proposed Method
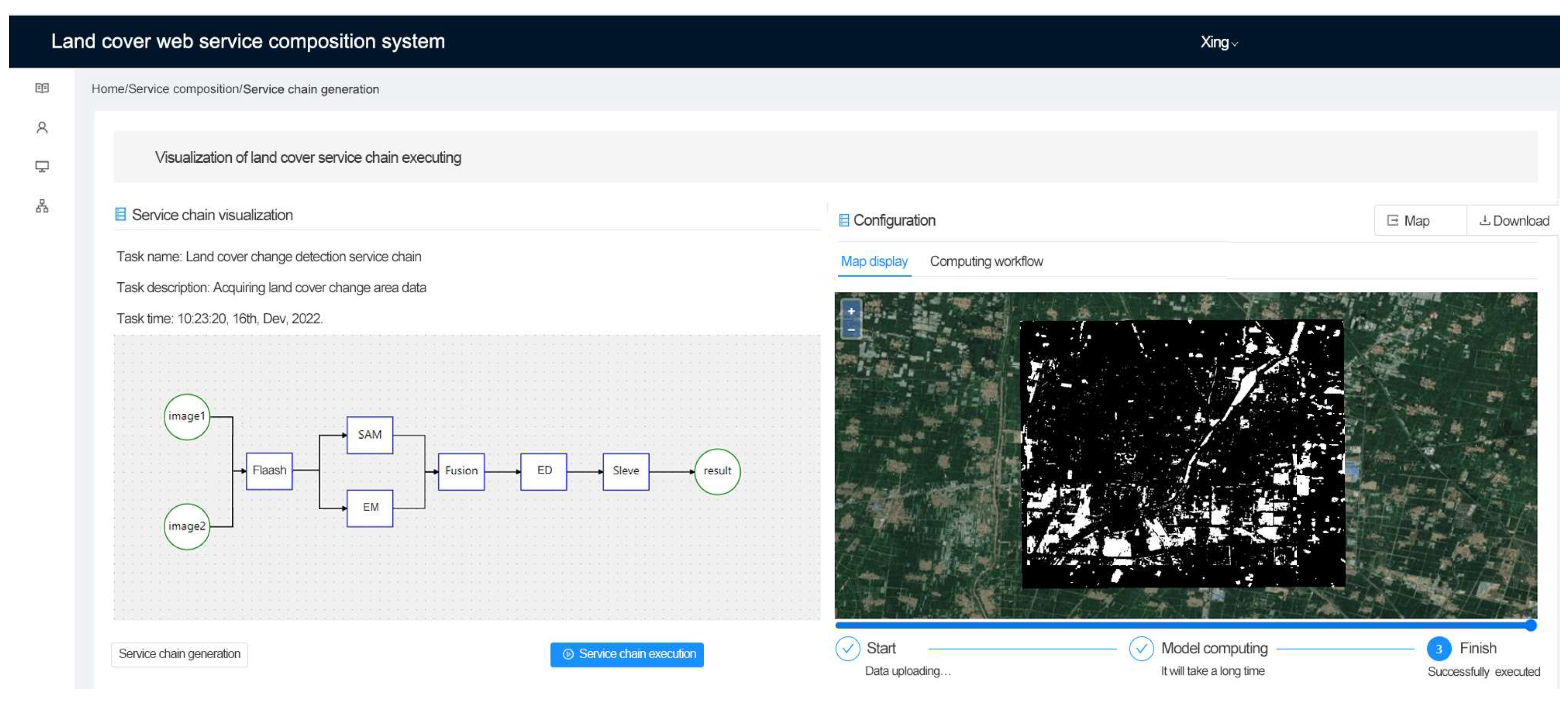
4.2. Implementation in a Web-Based System
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Atay Kaya, İ.; Kut Görgün, E. Land use and land cover change monitoring in Bandırma (Turkey) using remote sensing and geographic information systems. Environ. Monit. Assess. 2020, 192, 430. [Google Scholar] [CrossRef] [PubMed]
- Kharazmi, R.; Tavili, A.; Rahdari, M.R.; Chaban, L.; Panidi, E.; Rodrigo-Comino, J. Monitoring and assessment of seasonal land cover changes using remote sensing: A 30-year (1987–2016) case study of Hamoun Wetland, Iran. Environ. Monit. Assess. 2018, 190, 356. [Google Scholar] [CrossRef] [PubMed]
- Mollenhauer, H.; Kasner, M.; Haase, P.; Peterseil, J.; Wohner, C.; Frenzel, M.; Mirtl, M.; Schima, R.; Bumberger, J.; Zacharias, S. Long-term environmental monitoring infrastructures in Europe: Observations, measurements, scales, and socio-ecological representativeness. Sci. Total Environ. 2018, 624, 968–978. [Google Scholar] [CrossRef]
- Li, S.; Yang, H.; Lacayo, M.; Liu, J.; Lei, G. Impacts of land-use and land-cover changes on water yield: A case study in Jing-Jin-Ji, China. Sustainability 2018, 10, 960. [Google Scholar] [CrossRef]
- Dissanayake, D.; Morimoto, T.; Ranagalage, M.; Murayama, Y. Land-use/land-cover changes and their impact on surface urban heat islands: Case study of Kandy City, Sri Lanka. Climate 2019, 7, 99. [Google Scholar] [CrossRef]
- Jin, X.; Jin, Y.; Mao, X. Ecological risk assessment of cities on the Tibetan Plateau based on land use/land cover changes–Case study of Delingha City. Ecol. Indic. 2019, 101, 185–191. [Google Scholar] [CrossRef]
- Zhu, L.; Xing, H.; Hou, D. Analysis of carbon emissions from land cover change during 2000 to 2020 in Shandong Province, China. Sci. Rep. 2022, 12, 8021. [Google Scholar] [CrossRef]
- Mohanty, P.; Padhy, H.M.; Mishra, P. Geoweb Application for Web based geoprocessing. Asian J. Converg. Technol. (AJCT) 2018, 4, 1–5. [Google Scholar]
- Xing, H.; Chen, J.; Wu, H.; Zhang, J.; Liu, B. An online land cover change detection system with web service composition. In Proceedings of the 4th IEEE International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Bandung, Indonesia, 25–27 May 2016; pp. 275–279. [Google Scholar]
- Xing, H.; Hou, D.; Wang, S.; Yu, M.; Meng, F. O-LCMapping: A Google Earth Engine-based web toolkit for supporting online land cover classification. Earth Sci. Inform. 2021, 14, 529–541. [Google Scholar] [CrossRef]
- Hofer, B. Uses of online geoprocessing technology in analyses and case studies: A systematic analysis of literature. Int. J. Digit. Earth 2015, 8, 901–917. [Google Scholar] [CrossRef]
- de Melo, M.V.N.; de Oliveira, M.E.G.; de Almeida, G.L.P.; Gomes, N.F.; Morales, K.R.M.; Santana, T.C.; Silva, P.C.; Moraes, A.S.; Pandorfi, H.; da Silva, M.V. Spatiotemporal characterization of land cover and degradation in the agreste region of Pernambuco, Brazil, using cloud geoprocessing on Google Earth Engine. Remote Sens. Appl. Soc. Environ. 2022, 26, 100756. [Google Scholar]
- Li, R.; Liu, W.; Peng, Y.; Zhu, X.; Zhao, T.; Che, L. Glc-statistics: A web-based spatial statistics system for global land cover data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 4, 57–65. [Google Scholar] [CrossRef]
- Xing, H.; Chen, J.; Wu, H.; Hou, D. A web service-oriented geoprocessing system for supporting intelligent land cover change detection. ISPRS Int. J. Geo-Inf. 2019, 8, 50. [Google Scholar] [CrossRef]
- Fonte, C.C.; Minghini, M.; Patriarca, J.; Antoniou, V.; See, L.; Skopeliti, A. Generating up-to-date and detailed land use and land cover maps using OpenStreetMap and GlobeLand30. ISPRS Int. J. Geo-Inf. 2017, 6, 125. [Google Scholar] [CrossRef]
- Baryannis, G.; Plexousakis, D. Automated web service composition: State of the art and research challenges. ICS-FORTH Tech. Rep. 2010, 409. Available online: https://www.academia.edu/16602430/Automated_Web_Service_Composition_State_of_the_Art_and_Research_Challenges (accessed on 31 October 2022).
- Blum, A.L.; Furst, M.L. Fast planning through planning graph analysis. Artif. Intell. 1997, 90, 281–300. [Google Scholar] [CrossRef]
- Mena, F.M.; Ucan, R.H.; Cetina, V.U.; Ramirez, F.M. Web service composition using the bidirectional Dijkstra algorithm. IEEE Lat. Am. Trans. 2016, 14, 2522–2528. [Google Scholar] [CrossRef]
- Meyer, H.; Weske, M. Automated service composition using heuristic search. In Proceedings of the International Conference on Business Process Management, Vienna, Austria, 5–7 September 2006; pp. 81–96. [Google Scholar]
- Yan, Y.; Chen, M.; Yang, Y. Anytime QoS optimization over the PlanGraph for web service composition. In Proceedings of the 27th Annual ACM Symposium on Applied Computing, Trento, Italy, 26–30 March 2012; pp. 1968–1975. [Google Scholar]
- Brogi, A.; Corfini, S. Behaviour-aware discovery of Web service compositions. Int. J. Web Serv. Res. (IJWSR) 2007, 4, 1–25. [Google Scholar] [CrossRef][Green Version]
- Brogi, A.; Corfini, S.; Montes, J.F.A.; Delgado, I.N. A Prototype for Discovering Compositions of Semantic Web Services. In Proceedings of the SWAP, Pisa, Italy, 2016; Available online: https://www.yumpu.com/en/document/view/4779564/a-prototype-for-discovering-compositions-of-semantic-web-services (accessed on 31 October 2022).
- Lutz, M. Ontology-based descriptions for semantic discovery and composition of geoprocessing services. Geoinformatica 2007, 11, 1–36. [Google Scholar] [CrossRef]
- Thakkar, S.; Knoblock, C.A.; Ambite, J.L.; Shahabi, C. Dynamically composing web services from on-line sources. In Proceedings of the AAAI-2002 Workshop on Intelligent Service Integration, Edmonton, AB, Canada, 29 July 2002; pp. 1–7. [Google Scholar]
- Yue, P.; Di, L.; Yang, W.; Yu, G.; Zhao, P. Semantics-based automatic composition of geospatial Web service chains. Comput. Geosci. 2007, 33, 649–665. [Google Scholar] [CrossRef]
- Cruz, S.A.; Monteiro, A.M.; Santos, R. Automated geospatial web services composition based on geodata quality requirements. Comput. Geosci. 2012, 47, 60–74. [Google Scholar] [CrossRef]
- Huang, W.; Harrie, L. Towards knowledge-based geovisualisation using Semantic Web technologies: A knowledge representation approach coupling ontologies and rules. Int. J. Digit. Earth 2020, 13, 976–997. [Google Scholar] [CrossRef]
- Sun, Z.; Yue, P.; Lu, X.; Zhai, X.; Hu, L. A task ontology driven approach for live geoprocessing in a service-oriented environment. Trans. GIS 2012, 16, 867–884. [Google Scholar] [CrossRef]
- Zhuang, C.; Xie, Z.; Ma, K.; Guo, M.; Wu, L. A task-oriented knowledge base for geospatial problem-solving. ISPRS Int. J. Geo-Inf. 2018, 7, 423. [Google Scholar] [CrossRef]
- Li, W.; Song, M.; Tian, Y. An ontology-driven cyberinfrastructure for intelligent spatiotemporal question answering and open knowledge discovery. ISPRS Int. J. Geo-Inf. 2019, 8, 496. [Google Scholar] [CrossRef]
- Ulutaş Karakol, D.; Cömert, Ç. Architecture for semantic web service composition in spatial data infrastructures. Surv. Rev. 2022, 54, 1–16. [Google Scholar] [CrossRef]
- Scheider, S.; Meerlo, R.; Kasalica, V.; Lamprecht, A.-L. Ontology of core concept data types for answering geo-analytical questions. J. Spat. Inf. Sci. 2020, 167–201. [Google Scholar] [CrossRef]
- Scheider, S.; Nyamsuren, E.; Kruiger, H.; Xu, H. Geo-analytical question-answering with GIS. Int. J. Digit. Earth 2021, 14, 1–14. [Google Scholar] [CrossRef]
- Farnaghi, M.; Mansourian, A. Multi-agent planning for automatic geospatial web service composition in geoportals. ISPRS Int. J. Geo-Inf. 2018, 7, 404. [Google Scholar] [CrossRef]
- Kasalica, V.; Lamprecht, A.-L. APE: A command-line tool and API for automated workflow composition. In Security and Trust Management; Springer Science and Business Media LLC: Cham, Switzerland, 2020; pp. 464–476. [Google Scholar]
- Kruiger, J.F.; Kasalica, V.; Meerlo, R.; Lamprecht, A.L.; Nyamsuren, E.; Scheider, S. Loose programming of GIS workflows with geo-analytical concepts. Trans. GIS 2021, 25, 424–449. [Google Scholar] [CrossRef]
- Feoktistov, A.; Gorsky, S.; Kostromin, R.; Fedorov, R.; Bychkov, I. Integration of Web Processing Services with Workflow-Based Scientific Applications for Solving Environmental Monitoring Problems. ISPRS Int. J. Geo-Inf. 2021, 11, 8. [Google Scholar] [CrossRef]
- Miao, L.; Liu, C.; Fan, L.; Kwan, M.-P. An OGC web service geospatial data semantic similarity model for improving geospatial service discovery. Open Geosci. 2021, 13, 245–261. [Google Scholar] [CrossRef]
- Wei, Z.; Gui, Z.; Zhang, M.; Yang, Z.; Mei, Y.; Wu, H.; Liu, H.; Yu, J. Text GCN-SW-KNN: A novel collaborative training multi-label classification method for WMS application themes by considering geographic semantics. Big Earth Data 2021, 5, 66–89. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, B.; Zhang, W.; Chen, J. Q-graphplan: QoS-aware automatic service composition with the extended planning graph. IEEE Access 2020, 8, 8314–8323. [Google Scholar] [CrossRef]
- Li, X.; Madnick, S.; Zhu, H.; Fan, Y. An approach to composing web services with context heterogeneity. In Proceedings of the 2009 IEEE International Conference on Web Services, Los Angeles, CA, USA, 6–10 July 2009; pp. 695–702. [Google Scholar]
- Zhu, M.; Fan, G.; Li, J.; Kuang, H. An approach for QoS-aware service composition with graphplan and fuzzy logic. Procedia Comput. Sci. 2018, 141, 56–63. [Google Scholar] [CrossRef]
- Wiemann, S.; Karrasch, P.; Bernard, L. Ad-hoc combination and analysis of heterogeneous and distributed spatial data for environmental monitoring–design and prototype of a web-based solution. Int. J. Digit. Earth 2018, 11, 79–94. [Google Scholar] [CrossRef]
- Hou, Z.-W.; Qin, C.-Z.; Zhu, A.-X.; Wang, Y.-J.; Liang, P.; Wang, Y.-J.; Zhu, Y.-Q. Formalizing Parameter Constraints to Support Intelligent Geoprocessing: A SHACL-Based Method. ISPRS Int. J. Geo-Inf. 2021, 10, 605. [Google Scholar] [CrossRef]
- Peer, J. Web Service Composition as AI Planning: A Survey; University of St. Gallen Switzerland: St. Gallen, Switzerland, 2005. [Google Scholar]
- Xing, H.; Chen, J.; Wu, H.; Zhang, J.; Li, S.; Liu, B. A service relation model for web-based land cover change detection. ISPRS J. Photogramm. Remote Sens. 2017, 132, 20–32. [Google Scholar] [CrossRef]
- Horrocks, I.; Patel-Schneider, P.F.; Boley, H.; Tabet, S.; Grosof, B.; Dean, M. SWRL: A semantic web rule language combining OWL and RuleML. W3C Memb. Submiss. 2004, 21, 1–31. [Google Scholar]
- Bechhofer, S.; Volz, R.; Lord, P. Cooking the Semantic Web with the OWL API. In Proceedings of the International Semantic Web Conference, Sanibel Island, FL, USA, 20–23 October 2003; pp. 659–675. [Google Scholar]
- O’Connor, M.J.; Shankar, R.D.; Musen, M.A.; Das, A.K.; Nyulas, C. The SWRLAPI: A Development Environment for Working with SWRL Rules. In Proceedings of the 5th OWLED Workshop on OWL: Experience and Directions, Karlsruhe, Germany, 26–27 October 2008. [Google Scholar]
- O’Connor, M.J.; Das, A.K. SQWRL: A query language for OWL. In Proceedings of the 6th International Workshop on OWL: Experiences and Directions (OWLED 2009), Chantilly, VA, USA, 23–24 October 2009; Volume 529, pp. 42–44. [Google Scholar]
- Hou, D.; Wang, S.; Tian, X.; Xing, H. An Attention-Enhanced End-to-End Discriminative Network With Multiscale Feature Learning for Remote Sensing Image Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8245–8255. [Google Scholar] [CrossRef]
- Xing, H.; Zhu, L.; Feng, Y.; Wang, W.; Hou, D.; Meng, F.; Ni, Y. An Adaptive Change Threshold Selection Method Based on Land Cover Posterior Probability and Spatial Neighborhood Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11608–11621. [Google Scholar] [CrossRef]
- Xing, H.; Zhu, L.; Hou, D.; Zhang, T. Integrating change magnitude maps of spectrally enhanced multi-features for land cover change detection. Int. J. Remote Sens. 2021, 42, 4284–4308. [Google Scholar] [CrossRef]
- Hou, D.; Miao, Z.; Xing, H.; Wu, H. Two novel benchmark datasets from ArcGIS and bing world imagery for remote sensing image retrieval. Int. J. Remote Sens. 2021, 42, 240–258. [Google Scholar] [CrossRef]
- Wei, D.; Hou, D.; Zhou, X.; Chen, J. Change Detection Using a Texture Feature Space Outlier Index from Mono-Temporal Remote Sensing Images and Vector Data. Remote Sens. 2021, 13, 3857. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constraint Content | Data Type | Matching Meaning |
|---|---|---|
| spatial resolution band | Numeric | w1.output.sr = w2.input.sr |
| Int | w1.output.band = w2.input.band | |
| scale | String | w1.output.scale = w2.input.scale |
| coordinate reference system | String | w1.output.crs = w2.input.crs |
| projection reference system | String | w1.output.proj = w2.input.proj |
| data format | String | w1.output.format = w2.input.format |
| data category | String | w1. dataSource = w2. dataSource |
| data size | Double | w1.output.size ≤ w2.input.size |
| User Demand | Study Area | Data Category | Description |
|---|---|---|---|
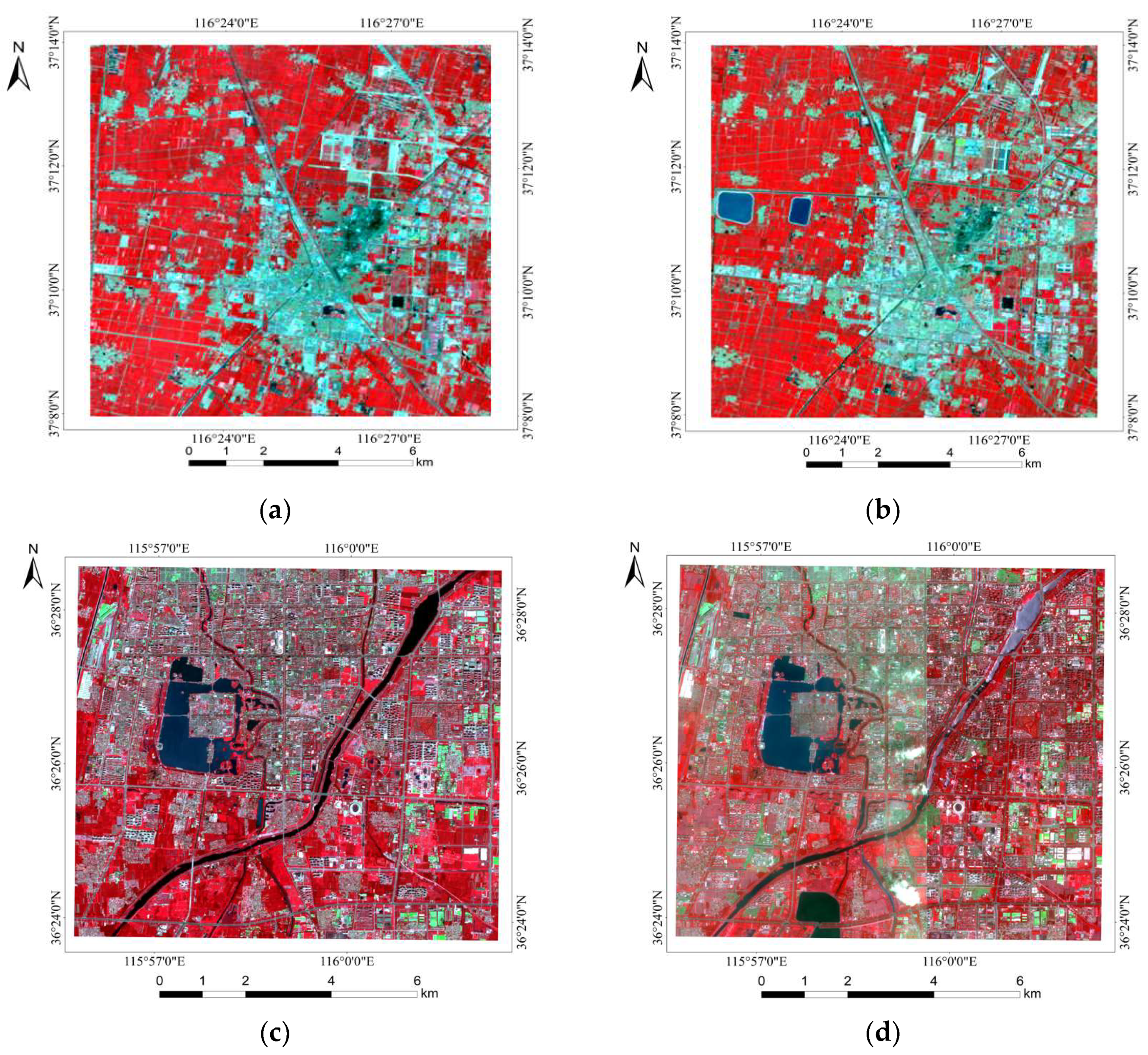
| Input | A | Landsat-8 | Remote sensing image data, with a spatial resolution of 2 m, acquisition time of 21 May 2013, and pixels of 372 × 372, coordinate system WGS84. |
| Landsat-8 | Remote sensing image data, with a spatial resolution of 2 m, an acquisition time of 26 August 2018, and pixels of 372 × 372, coordinate system CGCS2000 | ||
| B | Sentinel-2 | Remote sensing image data, with a spatial resolution of 10 m, radiation resolution 12 bits, an acquisition time of 16 May 2016, and pixels of 1225 × 890, coordinate system WGS84 | |
| Sentinel-2 | Remote sensing image data, with a spatial resolution of 10 m, radiation resolution 8 bits, an acquisition time of 26 October 2021, and pixels of 1225 × 890, coordinate system WGS84 | ||
| Expected Output | Change area | Land cover change data |
| SWRL Type | Name | SWRL Definition |
|---|---|---|
| Pretreatment Constraint Rules | AC_Rule | ServiceChain(?sc) ^ Service(?s) ^ label(?s, “AtmosphericCorrection”) ^ hasInput(?sc, ?in1) ^ radiometricResolution(?in1, ?rr1) ^ hasInput(?sc, ?in2) ^ radiometricResolution(?in2, ?rr2) ^ notEqual (?rr1, ?rr2) -> hasPreService(?sc, ?s) |
| Trans_Rule | ServiceChain(?sc) ^ Service(?s) ^ label(?s, “CoorTrans”) ^ hasInput(?sc, ?in1) ^ coordinateSystem(?in1, ?c1) ^ hasInput(?sc, ?in2) ^ coordinateSystem(?in2, ?c2) ^ notEqual(?c1, ?c2) -> hasPreService(?sc, ?s) | |
| Clip_Rule | ServiceChain(?sc) ^ Service(?s) ^ label(?s, “Tailoring”) ^ hasInput(?sc, ?in1) ^ hasInput(?sc, ?in2) ^ extent(?in1, ?e1) ^ extent(?in2, ?e2) ^ notEqual(?e1, ?e2) -> hasPreService(?sc, ?s) | |
| Logical Constraint Rules | CD_Rule | ServiceChain(?sc) ^ hasPreService(?ps) ^ Service(?s) ^ type(?s, “ChangeDetectionService”) ^ output(?ps, out) ^ input(?s, in) ^ equal(?in, ?out) ^ label(?s, ?la) ^ need(?sc, ?nd) ^ equal(?nd, ?la) -> hasCDService(?sc, ?s) |
| Fusion_Rule | ServiceChain(?sc) ^ Service(?s) ^ label(?s, “fusion”) -> hasFusionService(?sc, ?s) | |
| TS_Rule | ServiceChain(?sc) ^ hasFusionService(?fs) ^ Service(?s) ^ type(?s, “ThresholdSelection”) ^ output(?fs, out) ^ input(?s, in) ^ equal(?in, ?out) -> hasTSService(?sc, ?s) | |
| PP_Rule | ServiceChain(?sc) ^ hasTSService(?ts) ^ Service(?s) ^ type(?s, “PostProcessing”) ^ output(?ts, out) ^ input(?s, in) ^ equal(?in, ?out) -> hasPPService(?sc, ?s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, H.; Liu, C.; Li, R.; Wang, H.; Zhang, J.; Wu, H. Domain Constraints-Driven Automatic Service Composition for Online Land Cover Geoprocessing. ISPRS Int. J. Geo-Inf. 2022, 11, 629. https://doi.org/10.3390/ijgi11120629
Xing H, Liu C, Li R, Wang H, Zhang J, Wu H. Domain Constraints-Driven Automatic Service Composition for Online Land Cover Geoprocessing. ISPRS International Journal of Geo-Information. 2022; 11(12):629. https://doi.org/10.3390/ijgi11120629
Chicago/Turabian StyleXing, Huaqiao, Chang Liu, Rui Li, Haihang Wang, Jinhua Zhang, and Huayi Wu. 2022. "Domain Constraints-Driven Automatic Service Composition for Online Land Cover Geoprocessing" ISPRS International Journal of Geo-Information 11, no. 12: 629. https://doi.org/10.3390/ijgi11120629
APA StyleXing, H., Liu, C., Li, R., Wang, H., Zhang, J., & Wu, H. (2022). Domain Constraints-Driven Automatic Service Composition for Online Land Cover Geoprocessing. ISPRS International Journal of Geo-Information, 11(12), 629. https://doi.org/10.3390/ijgi11120629