

Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors
Abstract
1. Introduction
- The design of a region-based attentive encoder and decoder to capture multiscale spatial and temporal dependencies in non-Euclidean space.
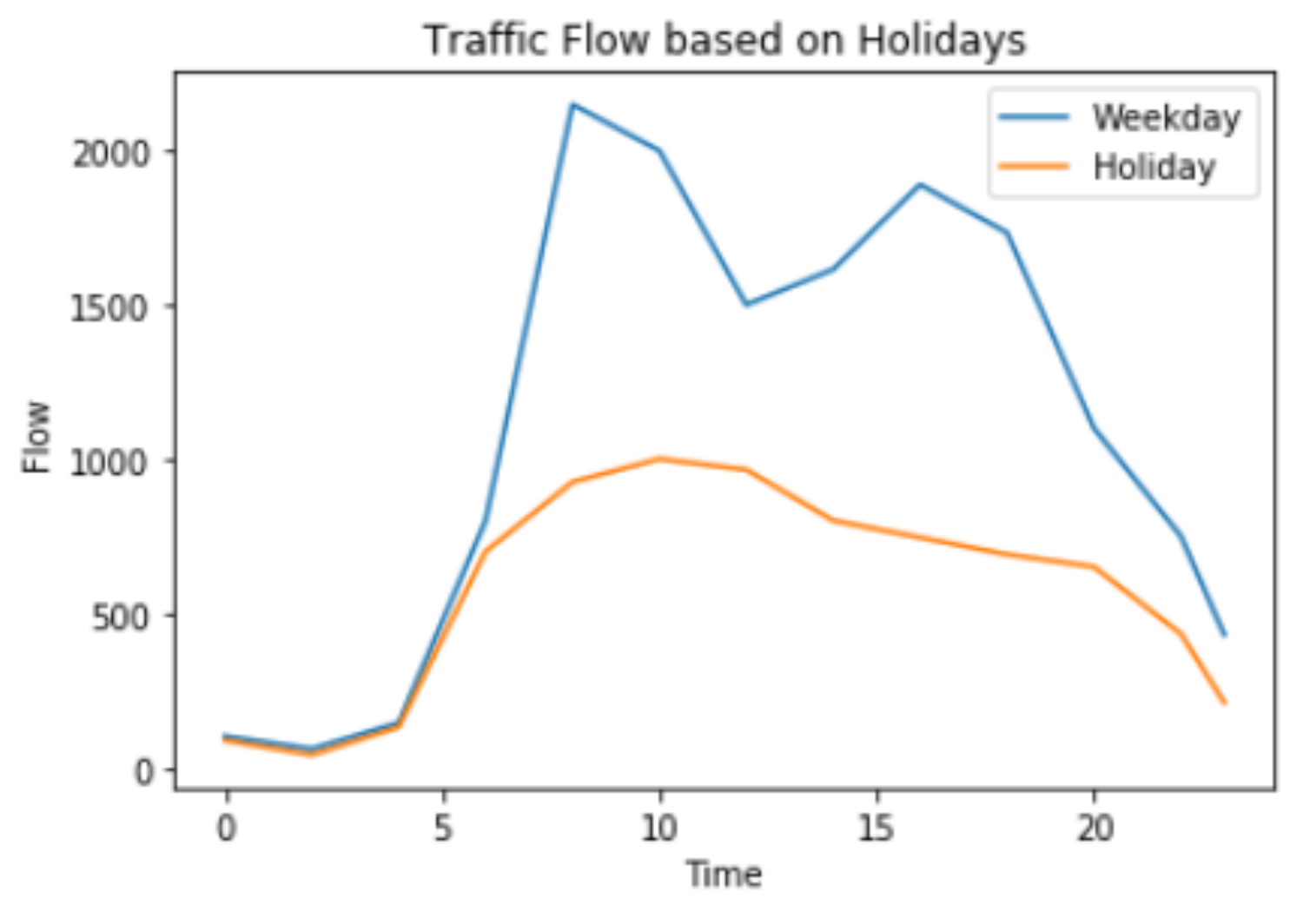
- The design of a decision fusion model by concatenating the output of the decoder with external factors such as weather, holidays and points of interest to forecast the future traffic flow in a horizon.
2. Related Work
- Model-driven or parametric models are based on several assumptions and preconditions, which include the Autoregressive Integrated Moving Average (ARIMA) model, Kalman filtering and Bayesian networks. The ARIMA model is known to predict stochastic traffic flow. The variants of the ARIMA model based on traffic flow are Kohonen ARIMA, subset ARIMA, seasonal ARIMA and time-series integrated ARIMA to predict short-term traffic [5,6,7]. The ARIMA model is a well-known and effective framework for traffic prediction. However, parametric models cannot fully represent the nonlinearity of traffic and extract spatiotemporal features.
- Data-driven or non-parametric models have made use of artificial intelligence to possibly manage big data when traffic flow changes dynamically [1,2]. Initially, non-parametric methods were based on machine learning. To forecast traffic, random forest, Support Vector Machine [20] and k-nearest neighbours (KNN) [21] were used. Recently, deep learning models, such as neural networks [2,22], deep belief networks (DBN) [23,24,25,26], CNNs [27,28], artificial neural networks (ANN) [29] and RNNs, [30,31,32] have been successful in short-term traffic forecasting. To overcome the limitations due to the vanishing gradient and exploding gradient problems occurring in RNN, an LSTM network [14,33,34,35] was deployed and found to have excellent prediction. Even though these models have considered the nonlinearity and stochastic nature of traffic flow, they are not effective for long-term prediction. However, long-term traffic is predicted using LSTM in [1] and deep neural network in [2]. To be specific, challenges persist in determining the accuracy and reliability of nonlinear, complex, time-varying systems. Nevertheless, recent literature has focused on non-Euclidean space to efficiently capture spatiotemporal features. The authors in [15] have proposed an attention-based periodic temporal neural network using LSTM to predict traffic in non-Euclidean space. Multigraph convolution network [16] has captured spatial and temporal dependencies with its extensive applications in GCN. However, external factors and weather are not considered.
- Hybrid or combined models integrate individual models to provide the benefits of both models when combined to improve estimation accuracy. It is significant that hybrid models are more accurate and effective in predicting the real-time flow of traffic. The authors in [11] have used DBN and multitask learning along with data fusion for weather to enhance the prediction accuracy. Data fusion enables the information from multiple sources to be combined together to produce high reliability. ARIMA and LSTM were combined to predict short-term traffic, achieving better accuracy in [12]. Likewise, [9] has jointly modelled CNN and LSTM based on Euclidean distance. Furthermore, in [8,9,10], spatial and temporal features are studied without taking into account external factors. Moreover, a hybrid model with CNN and LSTM has been used to predict the hourly air temperature in [17]. Likewise, multi-range attentive bicomponent GCN [18] and diffusion convolutional recurrent neural network (DCRNN) [19] have investigated non-Euclidean space with variants of CNN and GRU. Thus, hybrid models have improved accuracy over model-driven methods, and they are suitable for real-time traffic analysis.
3. Problem Formulation
4. Attention-Based Non-Euclidean Spatiotemporal Network (ANST)
- (i)
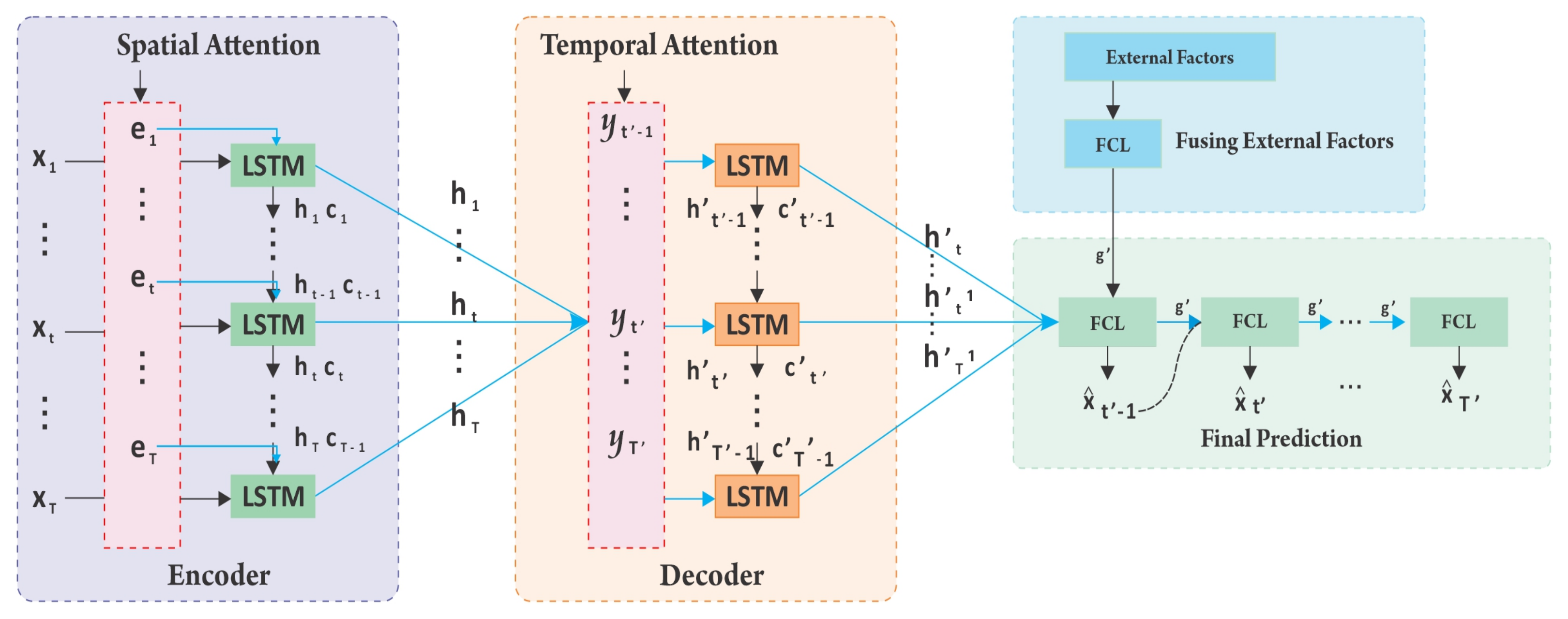
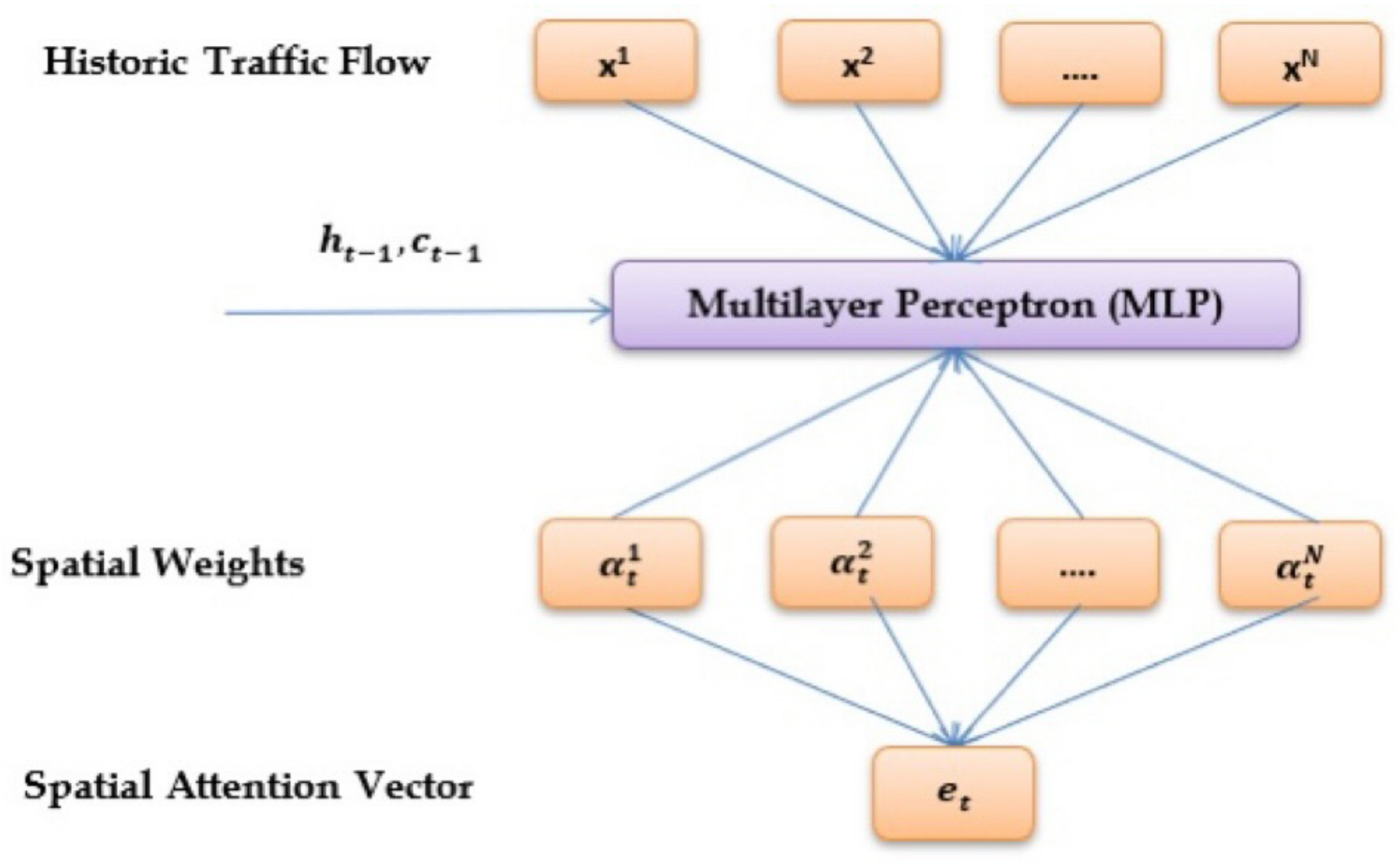
- Encoder to model spatial dependencies: The encoder uses LSTM components to extract spatial dependencies from the historical input traffic data. The spatial attention weight vectors are calculated with the support of a multi-layer perceptron (MLP) layer, as shown in Figure 3. The weight vector is obtained at time t from the last hidden state and cell state . The attention-based spatial non-Euclidean hidden states () are learned from the encoder and are fed as the input for the LSTM decoder to capture temporal dependencies.
- (ii)
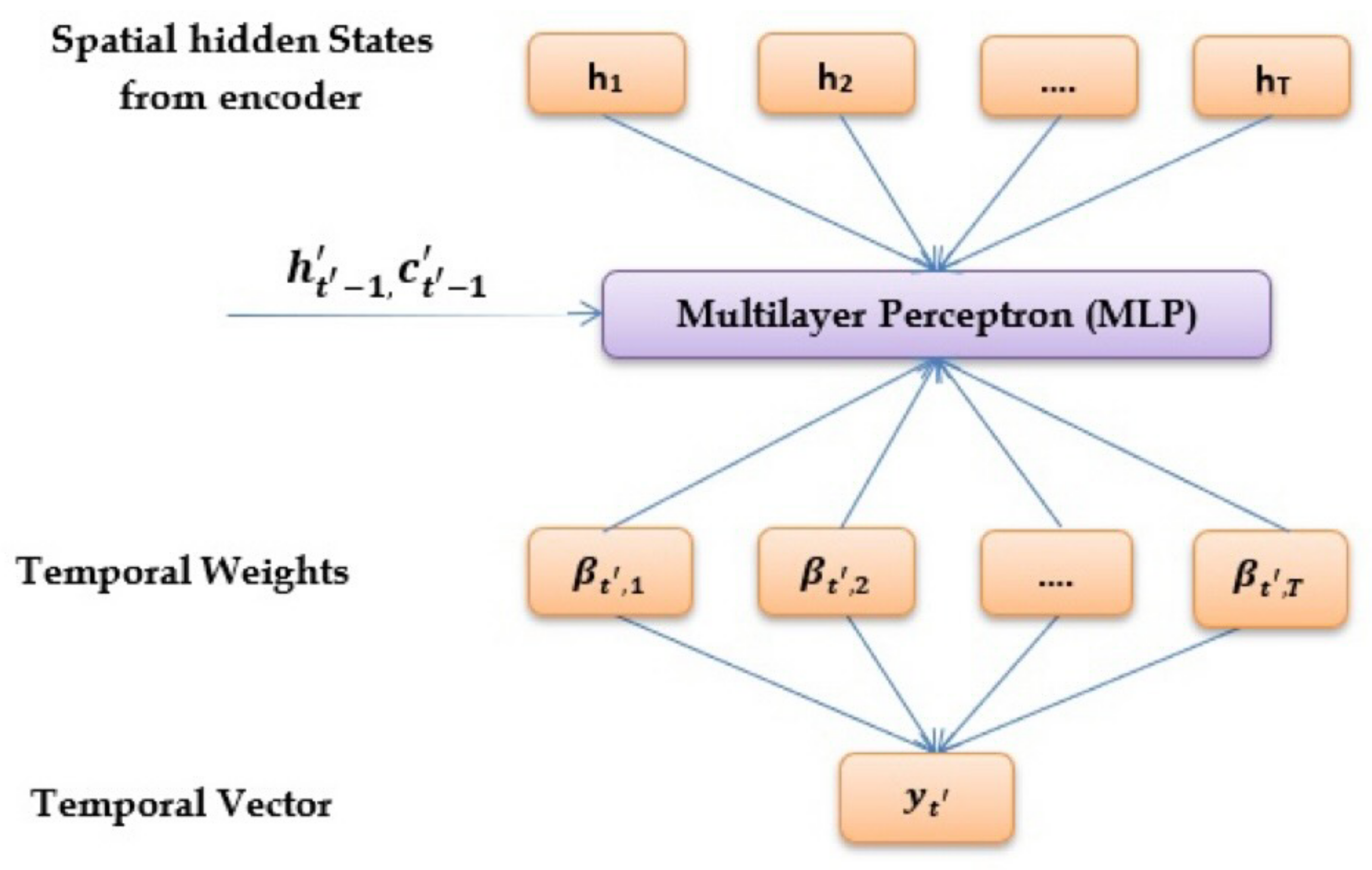
- Decoder to model temporal dependencies: The decoder uses LSTM units to embed the spatial hidden states. The temporal weight vector is obtained at time from the last hidden state and cell state . The temporal context is the summation of weights measured by the MLP layer and the non-Euclidean hidden states () from the encoder, as shown in Figure 4.
- (iii)
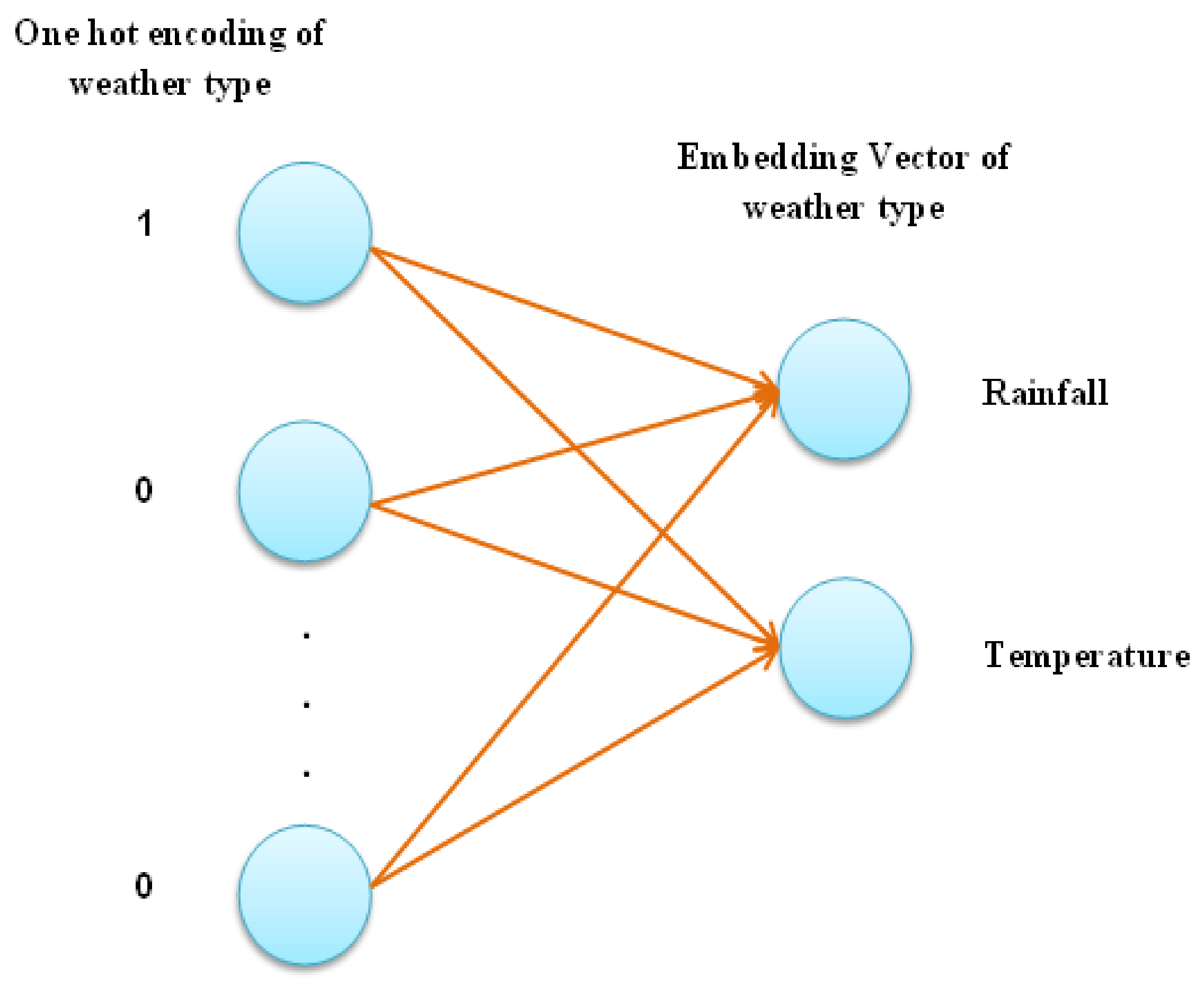
- Data fusion for modelling weather and external factors: Data fusion integrates data from multiple sources to enrich the quality of information. Decision-in, decision-out fusion is performed with the weather data from Equation (2), along with the output of the decoder LSTM (16), to obtain an enhanced prediction.
4.1. Modelling Spatial Features with Attentive Encoder
4.2. Modelling Temporal Features with Attentive Decoder
4.3. Decision-Level Data Fusion of External Factors
4.4. Training
| Algorithm 1: ANST Algorithm |
 |
5. Results and Discussion
5.1. Experimental Settings
5.2. Evaluation Metrics
5.3. Hyperparameter Settings
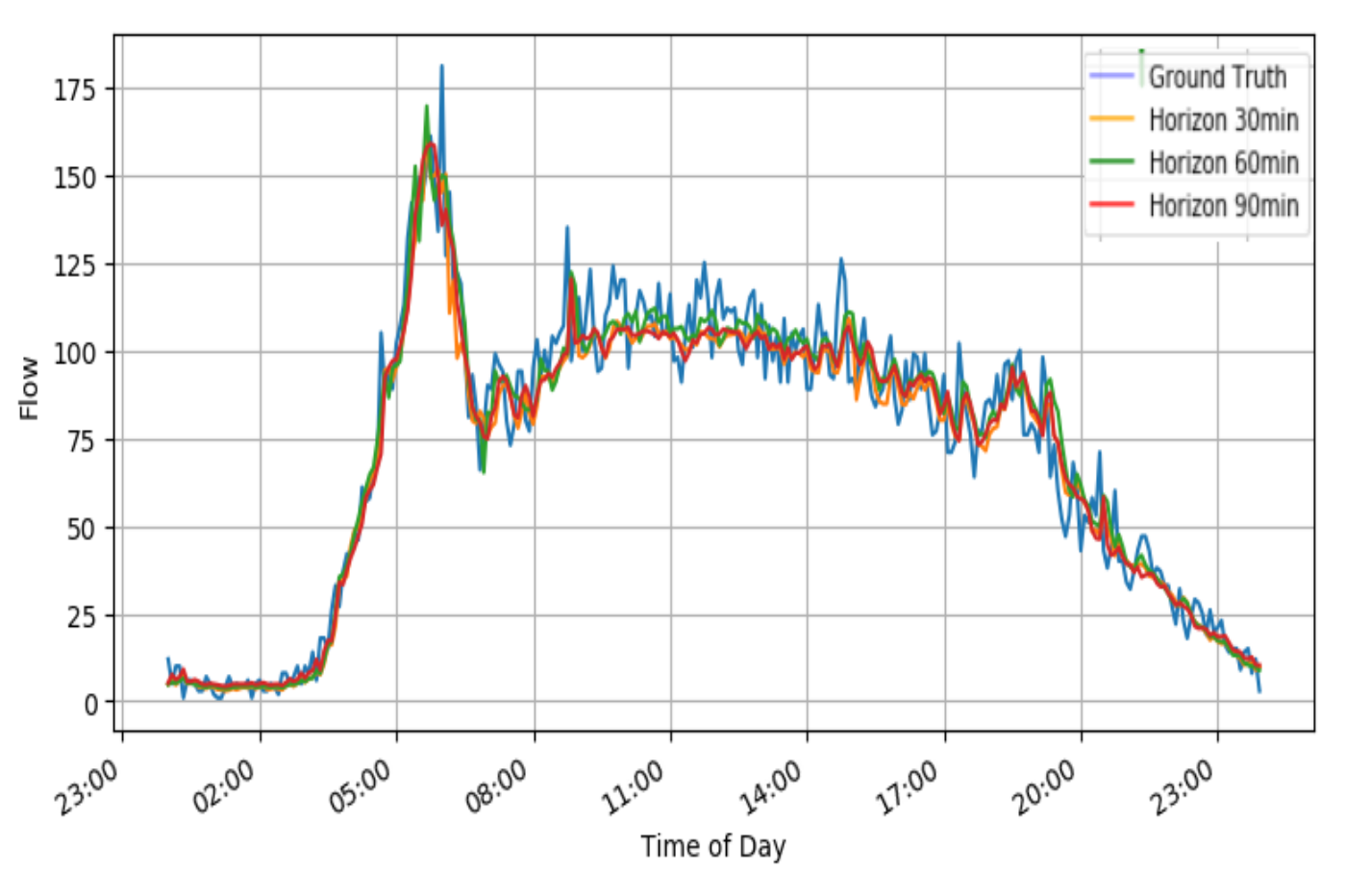
5.4. Evaluation of the Model
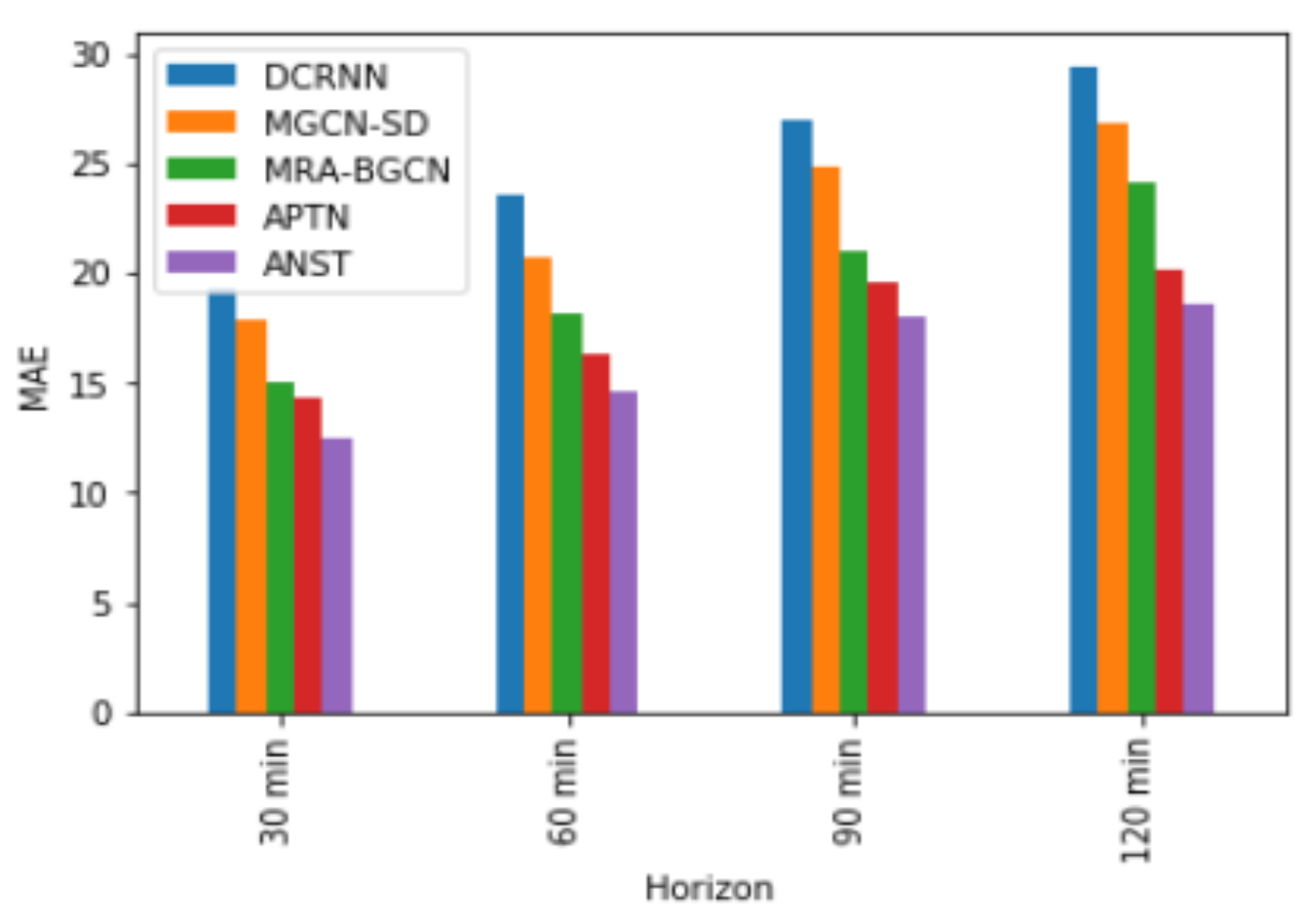
5.5. Comparison Models
- Diffusion convolutional recurrent neural network (DCRNN): combines RNN with convolutional networks through diffusion to generate the network graph based on the distance between nodes. The spatial dependency is obtained through bidirectional random walks in the graph, and the temporal dependency is obtained through an encoder–decoder framework with sampling.
- Spatiotemporal multi-graph convolutional networks with synthetic data (MGCN-SD): deploys a generative adversarial network to generate synthetic traffic volumes along with a multi-graph convolution network to extract non-Euclidean spatial features.
- Multi-Range attentive bicomponent graph convolutional network (MRA-BGCN): deploys a node-wise graph based on the road network and an edge-wise graph for interaction patterns among edges. The multi-range attention mechanism aggregates the information from neighbouring nodes to correlate the interaction.
- Attention-based periodic-temporal neural network (APTN): models both spatial and temporal dependencies using an encoder-decoder with attention mechanisms.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ITS | Intelligent transportation system |
| ANST | Attention-based non-Euclidean spatiotemporal network |
| CNN | Convolution neural network |
| GCN | Graph convolution neural network |
| RNN | Recurrent neural network |
| LSTM | Long short-term memory |
| GRU | Gated recurrent unit |
| ARIMA | Auto Regressive Integrated Moving Average |
| KNN | k-nearest neighbour |
| DBN | Deep belief network |
| ANN | Artificial neural network |
| DCRNN | Diffusion convolutional recurrent neural network |
| MGCN-SD | Spatiotemporal multi-graph convolutional networks with synthetic data |
| MRA-BGCN | Multi-range attentive bicomponent graph convolutional network |
| APTN | Attention-based periodic-temporal neural network |
| MLP | Multi-layer preceptron |
| PCC | Pearson’s correlation coefficient |
| FCL | Fully connected layer |
| MSE | Mean square error |
| MAE | Mean absolute error |
| RMSE | Root mean square error |
| MAPE | Mean absolute percentage error |
References
- Wang, Z.; Su, X.; Ding, Z. Long-term traffic prediction based on LSTM encoder-decoder architecture. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6561–6571. [Google Scholar] [CrossRef]
- Qu, L.; Li, W.; Li, W.; Ma, D.; Wang, Y. Daily long-term traffic flow forecasting based on a deep neural network. Expert Syst. Appl. 2019, 121, 304–312. [Google Scholar] [CrossRef]
- Zheng, J.; Huang, M. Traffic flow forecast through time series analysis based on deep learning. IEEE Access 2020, 8, 82562–82570. [Google Scholar] [CrossRef]
- Ghosh, B.; Basu, B.; O’Mahony, M. Multivariate short-term traffic flow forecasting using time-series analysis. IEEE Trans. Intell. Transp. Syst. 2009, 10, 246–254. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef]
- Koesdwiady, A.; Soua, R.; Karray, F. Improving traffic flow prediction with weather information in connected cars: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 65, 9508–9517. [Google Scholar] [CrossRef]
- Voort, M.V.D.; Dougherty, M.; Watson, S. Combining Kohonen maps with ARIMA time series models to forecast traffic flow. Transp. Res. Part C Emerg. Technol. 1996, 4, 307–318. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, C. Spatiotemporal Graph Convolutional Network for Multi-Scale Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2022, 11, 102. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Li, S.; Chen, Z.; Wan, H. Deep spatial temporal 3D convolutional neural networks for traffic data forecasting. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3913–3926. [Google Scholar] [CrossRef]
- Zang, D.; Ling, J.; Wei, Z.; Tang, K.; Cheng, J. Long-term traffic speed prediction based on multiscale spatiotemporal feature learning network. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3700–3709. [Google Scholar] [CrossRef]
- Tselentis, D.I.; Vlahogianni, E.I.; Karlaftis, M.G. Improving short-term traffic forecasts: To combine models or not to combine. IET Intell. Transp. Syst. 2015, 9, 193–201. [Google Scholar] [CrossRef]
- Lu, S.; Zhang, Q.; Chen, G.; Seng, D. A combined method for short-term traffic flow prediction based on recurrent neural network. Alex. Eng. J. 2021, 60, 87–94. [Google Scholar] [CrossRef]
- Chen, K.; Deng, M.; Shi, Y. A Temporal Directed Graph Convolution Network for Traffic Forecasting Using Taxi Trajectory Data. ISPRS Int. J. Geo-Inf. 2021, 10, 624. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Qi, H.; Shen, Y.; Wu, G.; Yin, B. A Spatial–Temporal Attention Approach for Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4909–4918. [Google Scholar] [CrossRef]
- Zhu, K.; Zhang, S.; Li, J.; Zhou, D.; Dai, H.; Hu, Z. Spatiotemporal multi-graph convolutional networks with synthetic data for traffic volume forecasting. Expert Syst. Appl. 2022, 187, 115992. [Google Scholar] [CrossRef]
- Hou, J.; Wang, Y.; Zhou, J.; Tian, Q. Prediction of hourly air temperature based on CNN–LSTM. Geomat. Nat. Hazards Risk 2022, 2022, 1962–1986. [Google Scholar] [CrossRef]
- Chen, W.; Chen, L.; Xie, Y.; Cao, W.; Gao, Y.; Feng, X. Multi-Range Attentive Bi-component Graph Convolutional Network for Traffic Forecasting. In Proceedings of the Thirty-Fourth AAAI Conference on Artificial Intelligence (AAAI-20), New York, NY, USA, 7–12 February 2020; pp. 3529–3536. [Google Scholar]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. Proc. Int. Conf. Mach. Learn. 2018, arXiv:1707.01926, 147–155. [Google Scholar]
- Mingheng, Z.; Yaobao, Z.; Ganglong, H.; Gang, C. Accurate multisteps traffic flow prediction based on SVM. Math. Probl. Eng. 2013, 2013, 1–8. [Google Scholar] [CrossRef]
- Sun, B.; Cheng, W.; Goswami, P.; Bai, G. Short-term traffic forecasting using self-adjusting k-nearest neighbours. IET Intell. Transp. Syst. 2018, 12, 41–48. [Google Scholar] [CrossRef]
- Xie, D.F.; Fang, Z.Z.; Jia, B.; He, Z. A data-driven lane-changing model based on deep learning. Transp. Res. Part C Emerg. Technol. 2019, 106, 41–60. [Google Scholar] [CrossRef]
- Li, L.; Qin, L.; Qu, X.; Zhang, J.; Wang, Y.; Ran, B. Day-ahead traffic flow forecasting based on a deep belief network optimized by the multi-objective particle swarm algorithm. Knowl. Based Syst. 2019, 172, 1–14. [Google Scholar] [CrossRef]
- Kong, F.; Li, J.; Jiang, B.; Song, H. Short-term traffic Flow prediction in smart multimedia system for Internet of vehicles based on deep belief network. Future Gener. Comput. Syst. 2019, 93, 460–472. [Google Scholar] [CrossRef]
- Zhao, L.; Zhou, Y.; Lu, H.; Fujita, H. Parallel computing method of deep belief networks and its application to traffic flow prediction. Knowl Based Syst. 2019, 163, 972–987. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, G. Traffic Flow prediction model based on deep belief network and genetic algorithm. IET Intell. Transp. Syst. 2018, 12, 533–541. [Google Scholar] [CrossRef]
- Sun, S.; Wu, H.; Xiang, L. City-wide traffic Flow forecasting using a deep convolutional neural network. Sensors 2020, 20, 421. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef]
- Sharma, B.; Kumar, S.; Tiwari, P. ANN based short-term traffic flow forecasting in undivided two lane highway. J. Big Data 2018, 5, 48. [Google Scholar] [CrossRef]
- Hu, R.; Chiu, Y.C.; Hsieh, C.W. Crowding prediction on mass rapid transit systems using a weighted bidirectional recurrent neural network. IET Intell. Transp. Syst. 2020, 14, 196–203. [Google Scholar] [CrossRef]
- Xiangxue, W.; Lunhui, X.; Kaixun, C. Data-driven short-term forecasting for urban road network traffic based on data processing and LSTM-RNN. Arab. J. Sci. Eng. 2019, 44, 3043–3060. [Google Scholar] [CrossRef]
- Duives, D.; Wang, G.; Kim, J. Forecasting pedestrian movements using recurrent neural networks: An application of crowd monitoring data. Sensors 2019, 19, 382. [Google Scholar] [CrossRef] [PubMed]
- Du, B.; Peng, H.; Wang, S.; Bhuiyan, M.Z.A.; Wang, L.; Gong, Q.; Liu, L.; Li, J. Deep irregular convolutional residual LSTM for urban traffic passenger flows prediction. IEEE Trans. Intell. Transp. Syst. 2020, 21, 972–985. [Google Scholar] [CrossRef]
- Mou, L.; Zhao, P.; Xie, H.; Chen, Y. T-LSTM: A long short-term memory neural network enhanced by temporal information for traffic flow prediction. IEEE Access 2019, 7, 98053–98060. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, K.; Li, J.; Lin, X.; Yang, B. LSTM-based traffic flow prediction with missing data. Neurocomputing 2018, 318, 297–305. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| region | |
| N | number of links in the region |
| traffic volume of link i during the past time steps T | |
| traffic volume of all N links in region | |
| weather of all N links in region | |
| predicted traffic for future horizons | |
| spatial weight of at time t for link i | |
| spatial attention weight vector at t | |
| M | spatial model dimension |
| L | dimension of LSTM encoder |
| ,,, | learnable parameters in spatial model |
| P | dimension of decoder LSTM |
| Q | dimension of the temporal model |
| ,,, | learnable parameters in temporal model |
| temporal context at |
| Time | 30 min | 60 min | 90 min | 120 min |
|---|---|---|---|---|
| Model | RMSE MAE MAPE | RMSE MAE MAPE | RMSE MAE MAPE | RMSE MAE MAPE |
| DCRNN | 24.54 19.32 15.62 | 27.26 23.52 16.87 | 31.89 26.98 18.75 | 35.78 29.43 20.04 |
| MGCN-SD | 21.36 17.83 12.31 | 24.96 20.67 15.53 | 29.65 24.89 16.78 | 33.82 26.9 17.93 |
| MRA-BGCN | 19.67 15.07 10.54 | 23.58 18.23 12.98 | 26.32 21.03 13.73 | 30.45 24.17 15.78 |
| APTN | 18.34 14.35 9.72 | 21.72 16.31 11.03 | 24.62 19.61 11.96 | 28.34 20.11 12.05 |
| ANST | 16.78 12.54 7.89 | 19.78 14.67 9.54 | 22.78 17.98 10.32 | 25.67 18.62 10.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nadarajan, J.; Sivanraj, R. Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors. ISPRS Int. J. Geo-Inf. 2022, 11, 619. https://doi.org/10.3390/ijgi11120619
Nadarajan J, Sivanraj R. Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors. ISPRS International Journal of Geo-Information. 2022; 11(12):619. https://doi.org/10.3390/ijgi11120619
Chicago/Turabian StyleNadarajan, Jeba, and Rathi Sivanraj. 2022. "Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors" ISPRS International Journal of Geo-Information 11, no. 12: 619. https://doi.org/10.3390/ijgi11120619
APA StyleNadarajan, J., & Sivanraj, R. (2022). Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors. ISPRS International Journal of Geo-Information, 11(12), 619. https://doi.org/10.3390/ijgi11120619