
Regression and Evaluation on a Forward Interpolated Version of the Great Circle Arcs–Based Distortion Metric of Map Projections


Abstract
:1. Introduction
2. Related Work
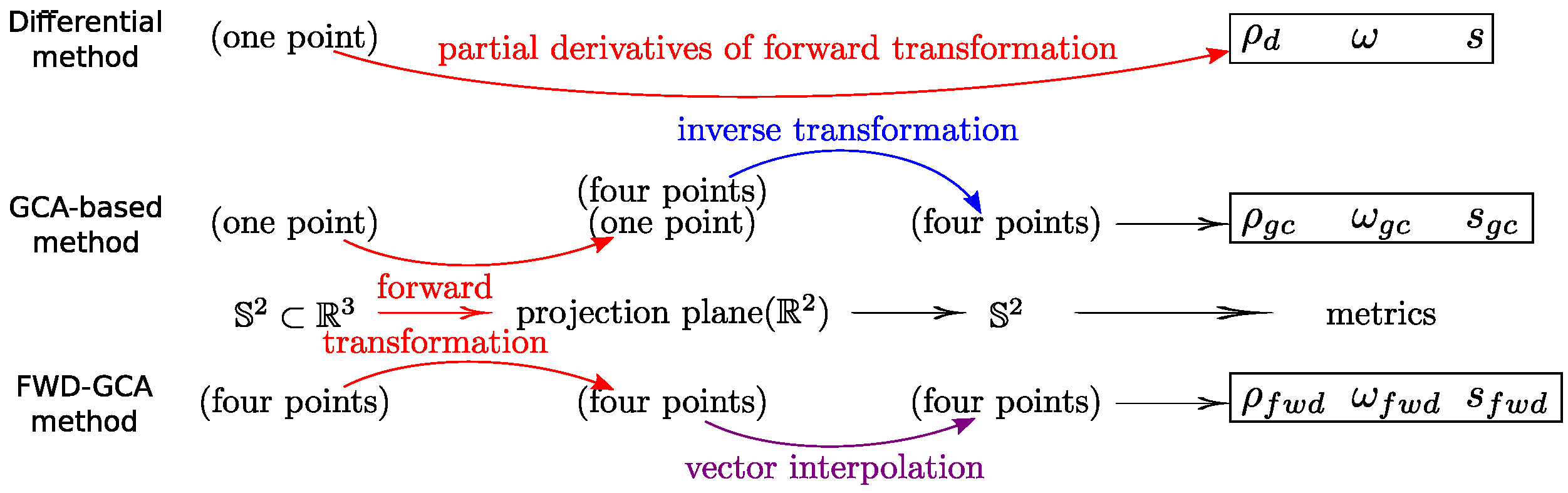
2.1. Differential Metric
2.2. Gca-Based Metric
3. Forward Interpolated Version of Gca-Based Metric
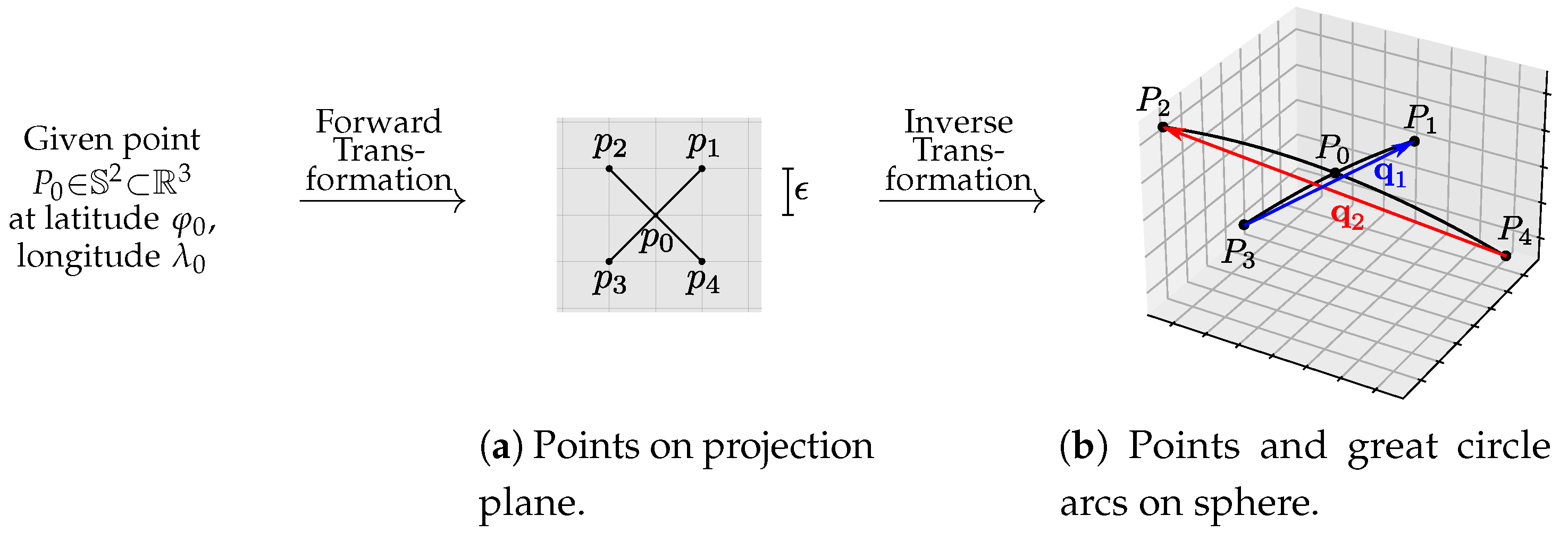
3.1. Spherical Sampling and Forward Projection
3.2. Interpolation of Vectors on Sphere
4. Regression Analysis
4.1. Linear Regression
4.2. Rational Function Regression
4.3. Approach of Estimating Regression Coefficients
5. Experiments and Validations of Metrics
5.1. Overview of Implementation and Experiments
5.2. Distribution and Further Regression of Regression Coefficients
5.2.1. Distribution of Regression Coefficients
5.2.2. Regression Results of Random Selection of Map Projections
5.3. Sensitivity of Regression Coefficients
5.3.1. Candidate of Regression Coefficients
5.3.2. Sensitivity of Regression Coefficients for Linear Regression
5.3.3. Sensitivity of Regression Coefficients for Rational Function–Based Regression
5.4. Determination and Analysis of Regression Coefficients
5.4.1. Determination of Regression Coefficients
5.4.2. Analysis of Cylindrical, Conic, and Azimuthal Projections
5.4.3. Correlation and Error Analysis of Angular Distortion
5.4.4. Correlation and Error Analysis of Area Distortion
6. Evaluation and Comparison of Map Projections
7. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SVD | Singular value decomposition |
| HEALPix | Hierarchical Equal Area isoLatitude Pixelisation |
| DSS | Direct spherical subdivision |
| SCA | Small circle arcs |
| GCA | Great circle arcs |
| FWD–GCA | Forward great circle arcs |
| ECEF | Earth-centered, earth-fixed |
| OLS | Ordinary least squares |
| PPMCC | Pearson product-moment correlation coefficient |
| RMSE | Root-mean-square error |
Appendix A. Derivation and Implementation of Differential-Based Maximum Angular Distortion in Julia
References
- ICA Executive Committee. A Strategic Plan for the International Cartographic Association 2003–2011. Available online: https://icaci.org/files/documents/reference_docs/ICA_Strategic_Plan_2003-2011.pdf (accessed on 26 September 2021).
- Snyder, J.P. Map Projections: A Working Manual; USGS Publications Warehouse: Washington, DC, USA, 1987; Available online: https://books.google.com/books?id=nPdOAAAAMAAJ (accessed on 10 September 2021).
- McDonnell, P.W. Map projections. In The Surveying Handbook, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1995; pp. 435–453. [Google Scholar]
- Hargitai, H.; Wang, J.; Stooke, P.J.; Karachevtseva, I.; Kereszturi, Á.; Gede, M. Map projections in planetary cartography. In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 177–202. [Google Scholar] [CrossRef]
- Iwai, Y.; Murayama, Y. Geographical analysis on the projection and distortion of INŌ’s Tokyo map in 1817. ISPRS Int. J. Geo-Inf. 2019, 8, 452. [Google Scholar] [CrossRef] [Green Version]
- Roşca, D.; Plonka, G. Uniform spherical grids via equal area projection from the cube to the sphere. J. Comput. Appl. Math. 2011, 236, 1033–1041. [Google Scholar] [CrossRef] [Green Version]
- Jenny, B.; Šavrič, B.; Patterson, T. A compromise aspect-adaptive cylindrical projection for world maps. Int. J. Geogr. Inf. Sci. 2015, 29, 935–952. [Google Scholar] [CrossRef]
- Holhoş, A.; Roşca, D. Area preserving maps and volume preserving maps between a class of polyhedrons and a sphere. Adv. Comput. Math. 2017, 43, 677–697. [Google Scholar] [CrossRef] [Green Version]
- Strebe, D. A bevy of area-preserving transforms for map projection designers. Cartogr. Geogr. Inf. Sci. 2019, 46, 260–276. [Google Scholar] [CrossRef]
- Šavrič, B.; Jenny, B. A new pseudocylindrical equal-area projection for adaptive composite map projections. Int. J. Geogr. Inf. Sci. 2014, 28, 2373–2389. [Google Scholar] [CrossRef]
- Strebe, D. An adaptable equal-area pseudoconic map projection. Cartogr. Geogr. Inf. Sci. 2016, 43, 338–345. [Google Scholar] [CrossRef]
- Strebe, D. An efficient technique for creating a continuum of equal-area map projections. Cartogr. Geogr. Inf. Sci. 2018, 45, 529–538. [Google Scholar] [CrossRef]
- Jenny, B.; Patterson, T. Blending world map projections with Flex Projector. Cartogr. Geogr. Inf. Sci. 2013, 40, 289–296. [Google Scholar] [CrossRef]
- Jenny, B.; Šavrič, B. Combining world map projections. In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 203–211. [Google Scholar] [CrossRef]
- Jenny, B.; Šavrič, B. Enhancing adaptive composite map projections: Wagner transformation between the Lambert azimuthal and the transverse cylindrical equal-area projections. Cartogr. Geogr. Inf. Sci. 2018, 45, 456–463. [Google Scholar] [CrossRef]
- Canters, F. Small-Scale Map Projection Design; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Šavrič, B.; Jenny, B.; Patterson, T.; Petrovič, D.; Hurni, L. A polynomial equation for the Natural Earth projection. Cartogr. Geogr. Inf. Sci. 2011, 38, 363–372. [Google Scholar] [CrossRef]
- Baselga, S. TestGrids: Evaluating and optimizing map projections. J. Surv. Eng. 2019, 145, 04019004. [Google Scholar] [CrossRef]
- Kunimune, J.H. Minimum-error world map projections defined by polydimensional meshes. Int. J. Cartogr. 2021, 21, 78–99. [Google Scholar] [CrossRef]
- Evenden, G.I. libproj4: A Comprehensive Library of Cartographic Projection Functions (Preliminary Draft); Technical Report; Falmouth, MA, USA, 2008; Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.620.4554 (accessed on 26 September 2021).
- Kessler, F.C.; Battersby, S.E.; Finn, M.P.; Clarke, K.C. Map projections and the Internet. In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 117–148. [Google Scholar] [CrossRef]
- Robinson, A.H. The Committee on Map Projections. Which map is best? In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1–14. [Google Scholar] [CrossRef]
- Robinson, A.H. The Committee on Map Projections. Choosing a world map. In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 15–48. [Google Scholar] [CrossRef]
- Kerkovits, K. Comparing finite and infinitesimal map distortion measures. Int. J. Cartogr. 2019, 5, 3–22. [Google Scholar] [CrossRef]
- Kerkovits, K. A statistical reinterpretation and assessment of criteria used for measuring map projection distortion. Cartogr. Geogr. Inf. Sci. 2020, 47, 481–491. [Google Scholar] [CrossRef]
- Kessler, F.C.; Battersby, S.E. Working with Map Projections: A Guide to Their Selection; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Gosling, P.C.; Symeonakis, E. Automated map projection selection for GIS. Cartogr. Geogr. Inf. Sci. 2020, 47, 261–276. [Google Scholar] [CrossRef]
- Tissot, A. Mémoire sur la Représentation des Surfaces et les Projections des Cartes Géographiques; Gauthier-Villars: Paris, France, 1881. [Google Scholar]
- Papadopoulos, A. Nicolas-Auguste Tissot: A link between cartography and quasiconformal theory. Arch. Hist. Exact Sci. 2017, 71, 319–336. [Google Scholar] [CrossRef] [Green Version]
- Laskowski, P.H. The traditional and modern look at Tissot’s Indicatrix. Am. Cartogr. 1989, 16, 123–133. [Google Scholar] [CrossRef]
- Goldberg, D.M.; Gott, J.R., III. Flexion and skewness in map projections of the earth. Cartogr. Int. J. Geogr. Inf. Geovis. 2007, 42, 297–318. [Google Scholar] [CrossRef] [Green Version]
- Kerkovits, K. Calculation and visualization of flexion and skewness. Kartogr. Geoinf. 2018, 17, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Capek, R. Which is the best projection for the world map? In Proceedings of the 20th International Cartographic Conference, Beijing, China, 6–10 August 2001; Volume 5, pp. 3084–3093. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.468.2289 (accessed on 26 September 2021).
- Šavrič, B.; Patterson, T.; Jenny, B. The Equal Earth map projection. Int. J. Geogr. Inf. Sci. 2019, 33, 454–465. [Google Scholar] [CrossRef]
- Górski, K.M.; Hivon, E.; Banday, A.J.; Wandelt, B.D.; Hansen, F.K.; Reinecke, M.; Bartelmann, M. HEALPix: A framework for high-resolution discretization and fast analysis of data distributed on the sphere. Astrophys. J. 2005, 622, 759. [Google Scholar] [CrossRef]
- Gao, Y.; Du, Z.; Xu, W.; Li, M.; Dong, W. HEALPix-IA: A global registration algorithm for initial alignment. Sensors 2019, 19, 427. [Google Scholar] [CrossRef] [Green Version]
- Robinson, A.H. The Committee on Map Projections. Matching the map projection to the need. In Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; pp. 49–116. [Google Scholar] [CrossRef]
- Snyder, J.P. An equal-area map projection for polyhedral globes. Cartogr. Int. J. Geogr. Inf. Geovis. 1992, 29, 10–21. [Google Scholar] [CrossRef]
- Robinson, A.H. A new map projection: Its development and characteristics. Int. Yearb. Cartogr. 1974, 14, 145–155. [Google Scholar]
- Solanilla, L.; Oostra, A.; Yáñez, J.P. Peirce Quincuncial projection. Rev. Integr. 2016, 34, 23–38. [Google Scholar] [CrossRef] [Green Version]
- Christensen, A.H. The Chamberlin Trimetric projection. Cartogr. Geogr. Inf. Syst. 1992, 19, 88–100. [Google Scholar] [CrossRef]
- White, D.; Kimerling, A.J.; Sahr, K.; Song, L. Comparing area and shape distortion on polyhedral-based recursive partitions of the sphere. Int. J. Geogr. Inf. Sci. 1998, 12, 805–827. [Google Scholar] [CrossRef]
- Sahr, K.; White, D.; Kimerling, A.J. Geodesic discrete global grid systems. Cartogr. Geogr. Inf. Sci. 2003, 30, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.; Song, X.; Gong, G. Averaged ratio between complementary profiles for evaluating shape distortions of map projections and spherical hierarchical tessellations. Comput. Geosci. 2016, 87, 41–55. [Google Scholar] [CrossRef]
- Yan, J.; Yang, X.; Li, N.; Gong, G. Spherical great circle arcs based indicators for evaluating distortions of map projections. Acta Geod. Cartogr. Sin. 2020, 49, 711–723. [Google Scholar] [CrossRef]
- Bayeva, Y.Y. Kriterii otsenki dostoinstva kartograficheskikh proyektsiy ispolzuemykh dlya sostavleniya kart mira. Geod. Aerofotosyomka 1987, 3, 109–112. [Google Scholar]
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A fresh approach to numerical computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef] [Green Version]
- Revels, J.; Lubin, M.; Papamarkou, T. Forward-mode automatic differentiation in Julia. arXiv 2016, arXiv:1607.07892. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| All Non-Conformal Map Projections in Figure 8a | Most Non-Cylindrical, Non-Conic, and Non-Azimuthal Projections in Figure 8b | |
|---|---|---|
| range of | ||
| PPMCC () | −0.999999999999989 | −0.9992 |
| PPMCC () | 0.999999999999992 | 0.9998 |
| Type of Regression | Coefficients | Range | Mean Value |
|---|---|---|---|
| Linear regression | −2.25 | ||
| 2.84 | |||
| Rational function–based regression | 4.82 | ||
| Linear regression for and | −0.280 | ||
| −1.012 | |||
| Linear regression for and | 0.349 | ||
| 0.990 |
| Linear Regression | Rational Function–Based Regression | ||||||
|---|---|---|---|---|---|---|---|
| Group # | Used | Used | |||||
| Group 1 | 4.82 | 5.12 | |||||
| Group 2 | 4.82 | 5.12 | ✓ | ||||
| Group 3 | 4.82 | 5.12 | |||||
| Group 4 | 4.82 | 5.12 | |||||
| Group 5 | 4.82 | 5.14 | ✓ | ||||
| Group 6 | 4.82 | 5.13 | ✓ | ||||
| Group 7 | 4.82 | 5.11 | ✓ | ||||
| Group 8 | 2.48 | ✓ | 4.82 | 5.12 | |||
| Group 9 | 5.40 | ✓ | 4.82 | 5.11 | |||
| Group 10 | 4.82 | 5.11 | |||||
| Group 11 | 4.82 | 5.13 | |||||
| Group 12 | 4.82 | 5.11 | ✓ | ||||
| manual setting | 2 | ✓ | 4.82 | 5.13 | ✓ | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Xu, T.; Li, N.; Gong, G. Regression and Evaluation on a Forward Interpolated Version of the Great Circle Arcs–Based Distortion Metric of Map Projections. ISPRS Int. J. Geo-Inf. 2021, 10, 649. https://doi.org/10.3390/ijgi10100649
Yan J, Xu T, Li N, Gong G. Regression and Evaluation on a Forward Interpolated Version of the Great Circle Arcs–Based Distortion Metric of Map Projections. ISPRS International Journal of Geo-Information. 2021; 10(10):649. https://doi.org/10.3390/ijgi10100649
Chicago/Turabian StyleYan, Jin, Tiansheng Xu, Ni Li, and Guanghong Gong. 2021. "Regression and Evaluation on a Forward Interpolated Version of the Great Circle Arcs–Based Distortion Metric of Map Projections" ISPRS International Journal of Geo-Information 10, no. 10: 649. https://doi.org/10.3390/ijgi10100649
APA StyleYan, J., Xu, T., Li, N., & Gong, G. (2021). Regression and Evaluation on a Forward Interpolated Version of the Great Circle Arcs–Based Distortion Metric of Map Projections. ISPRS International Journal of Geo-Information, 10(10), 649. https://doi.org/10.3390/ijgi10100649