A Pressing Attachment Approach for a Wall-Climbing Robot Utilizing Passive Suction Cups †

Abstract
1. Introduction
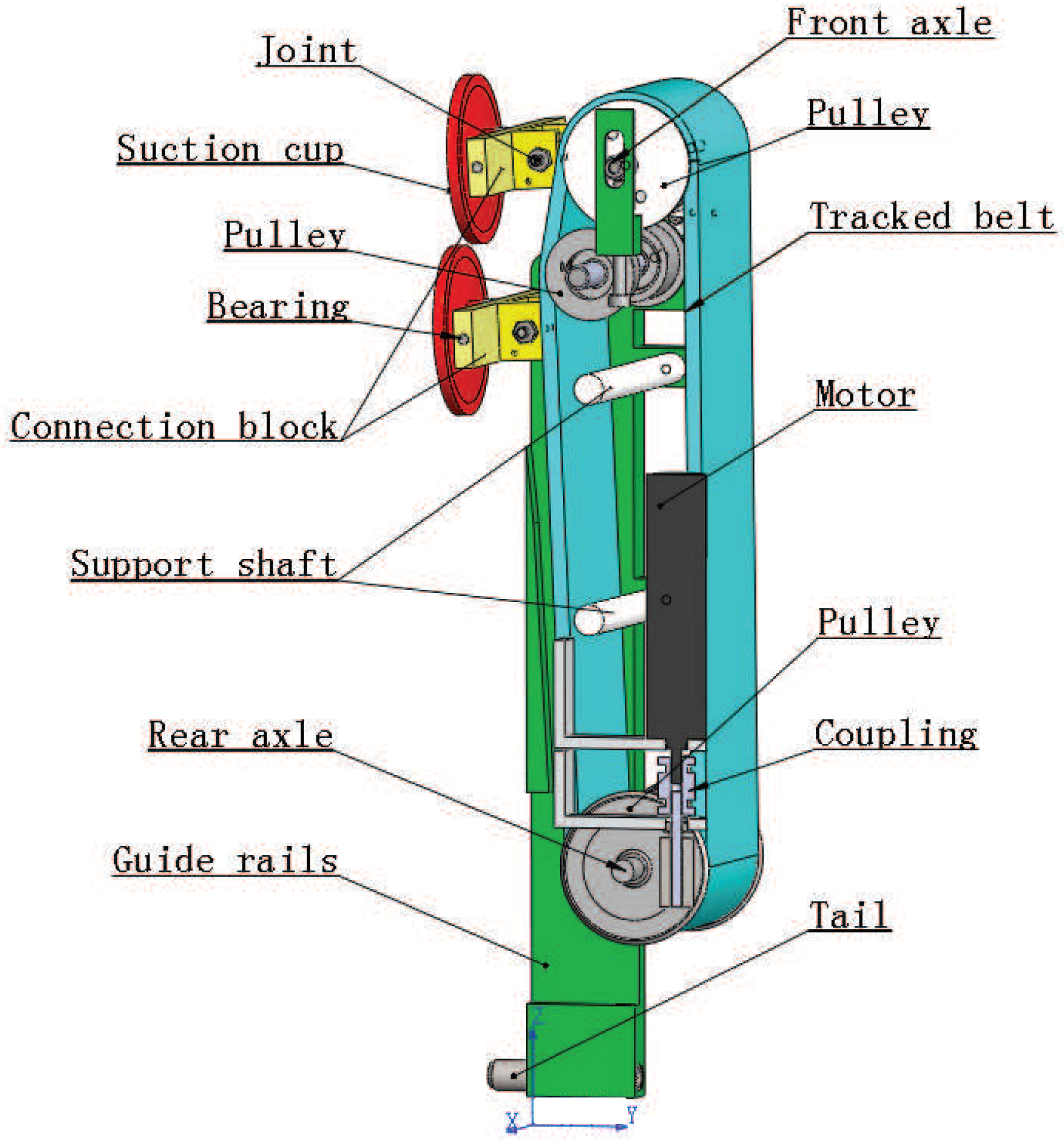
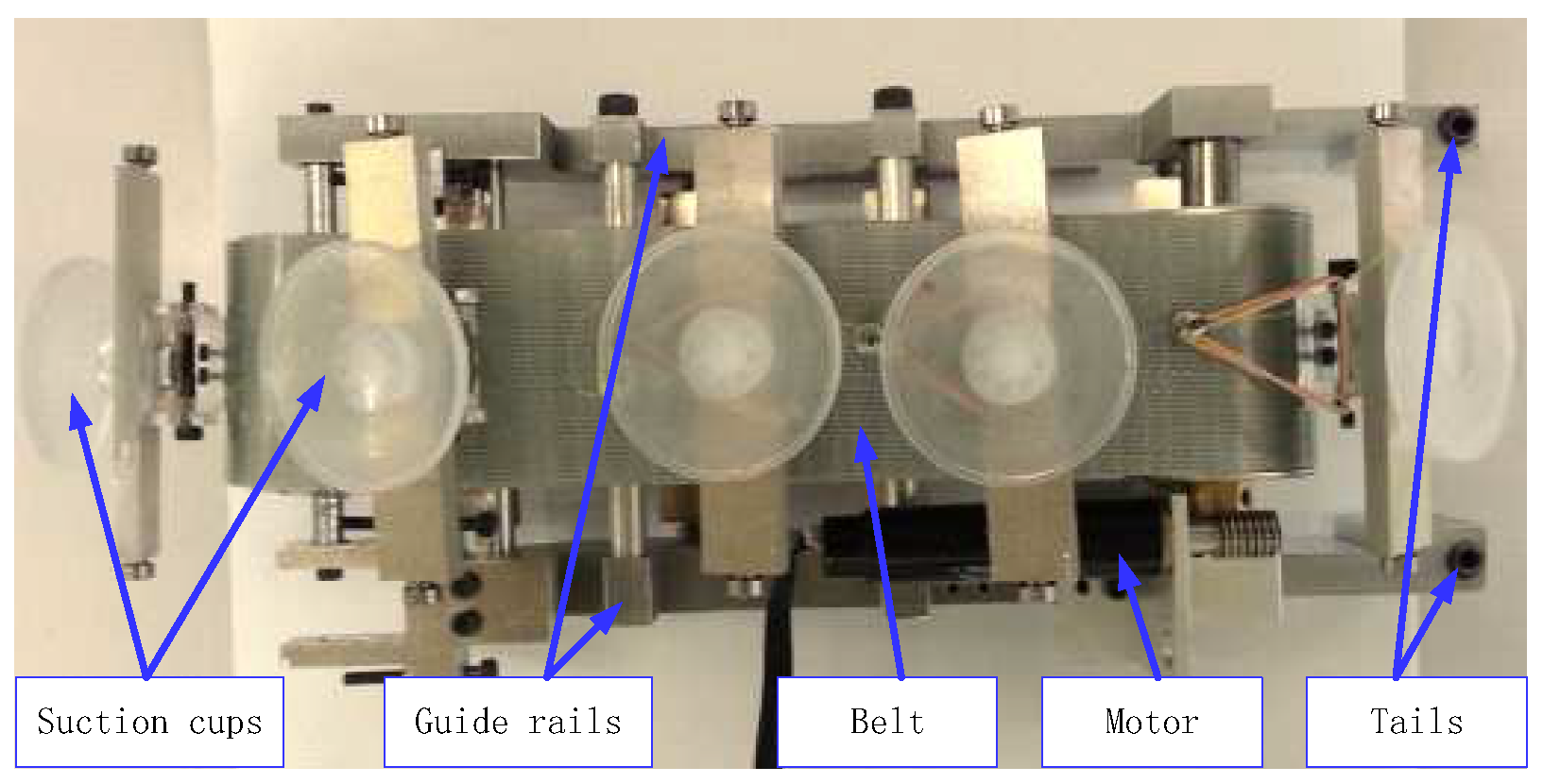
2. Robot Design
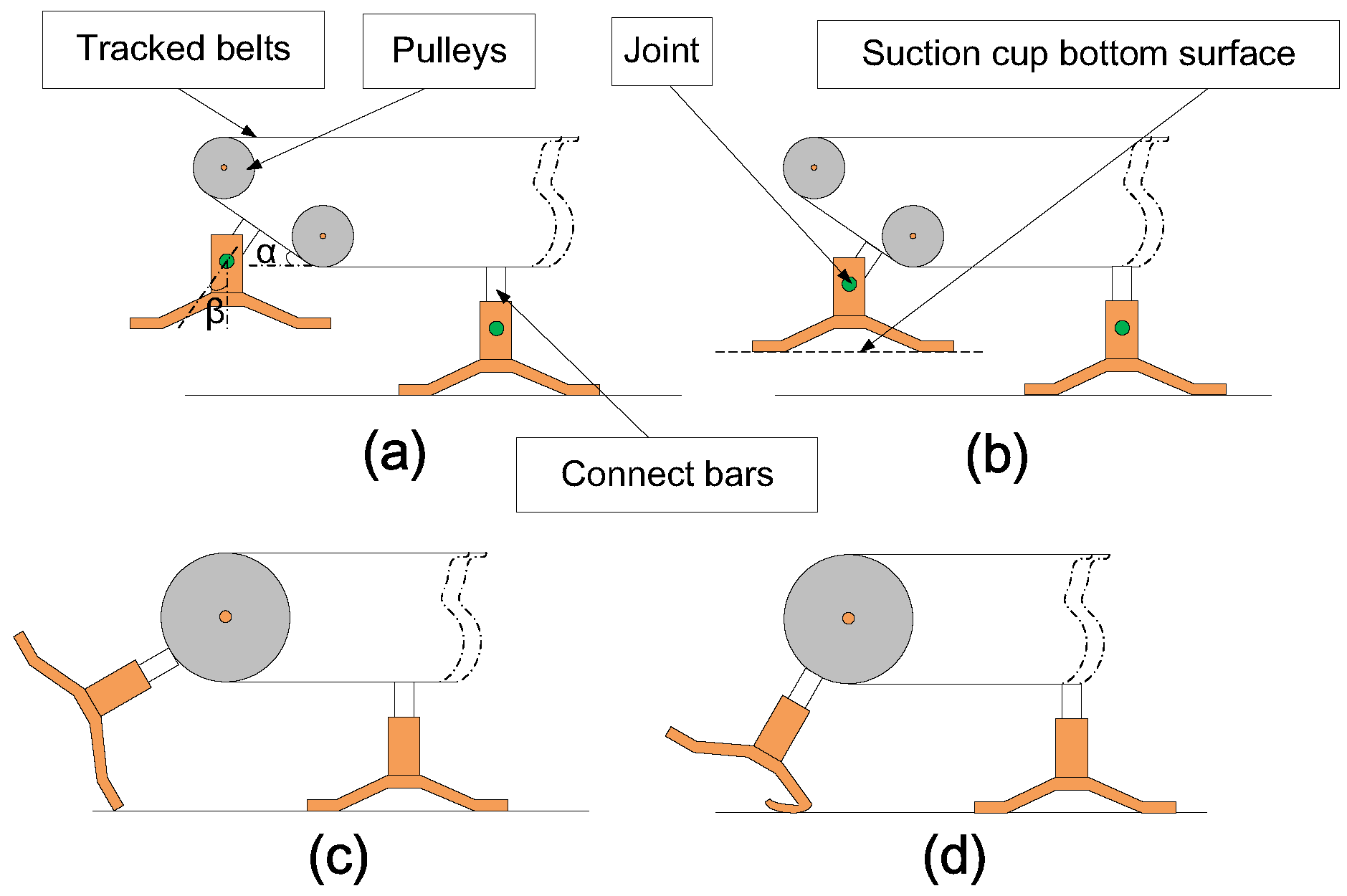
2.1. Design of the Robot Design
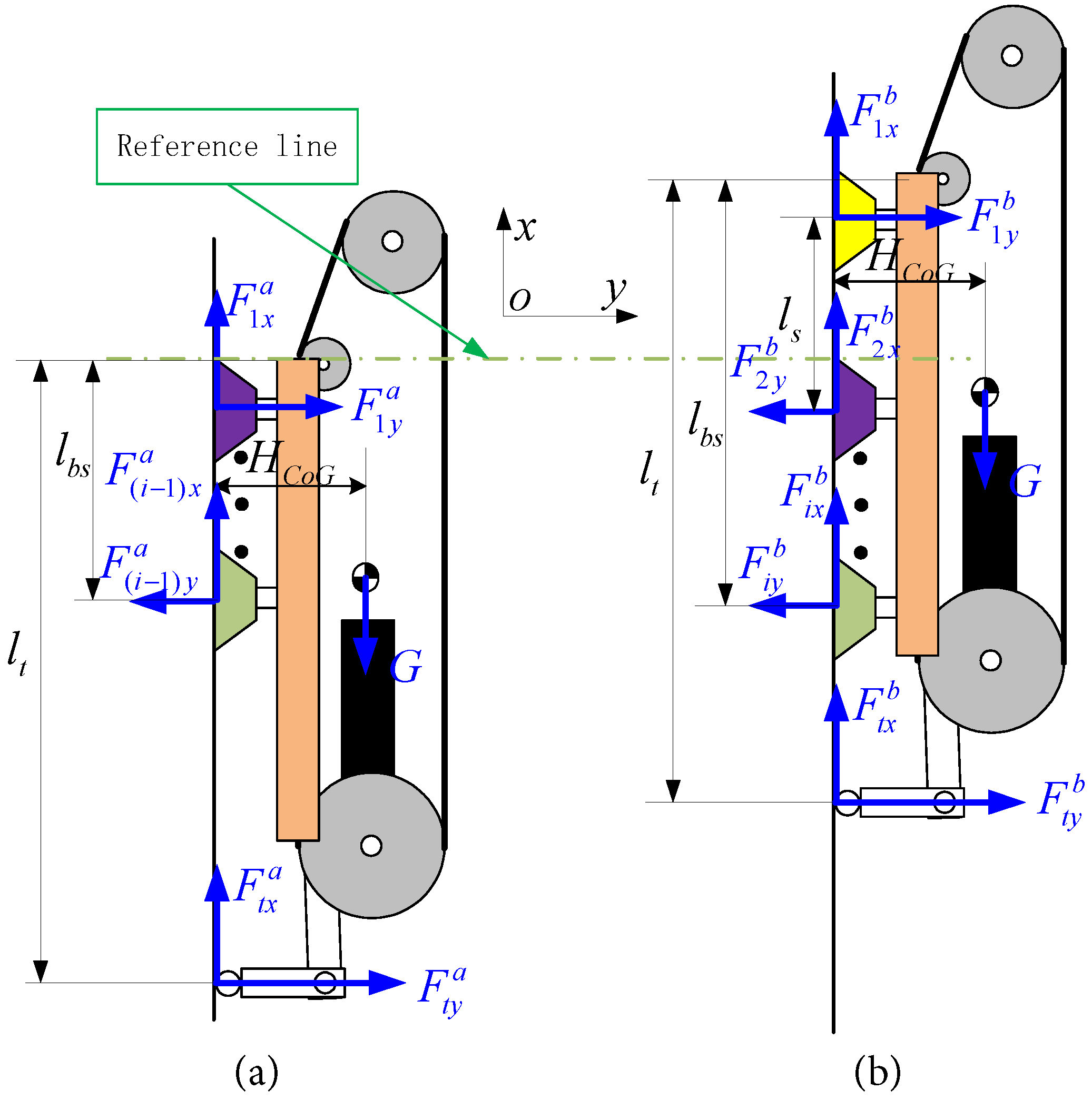
2.2. Force Analysis
3. Analysis of the Adopted Suction Cup
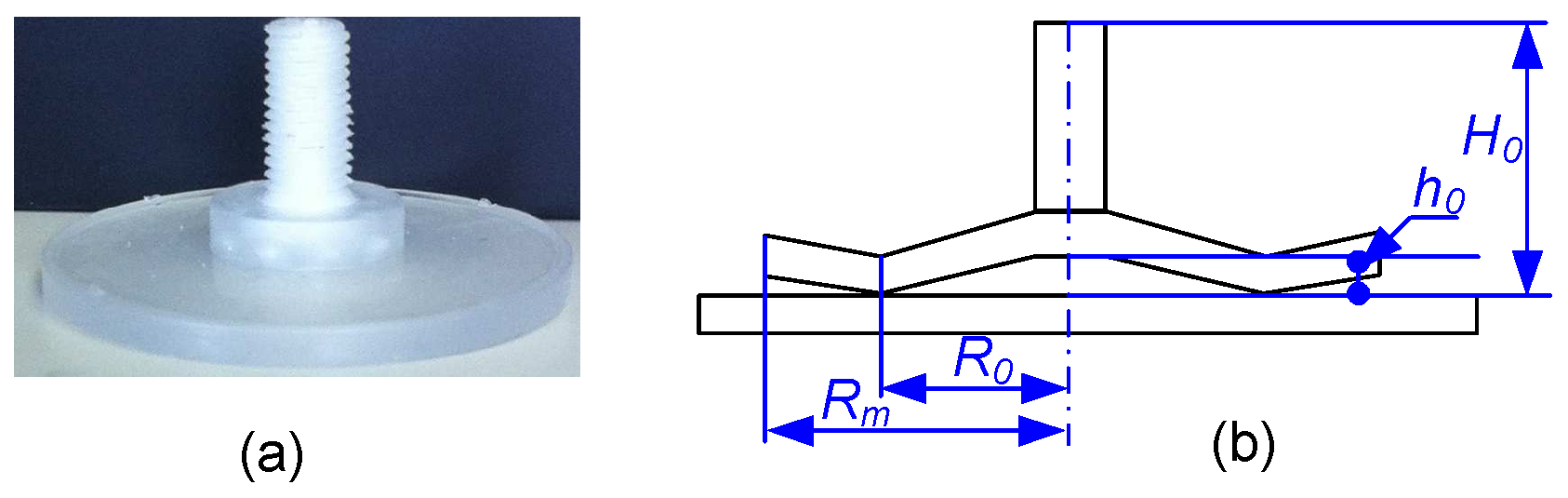
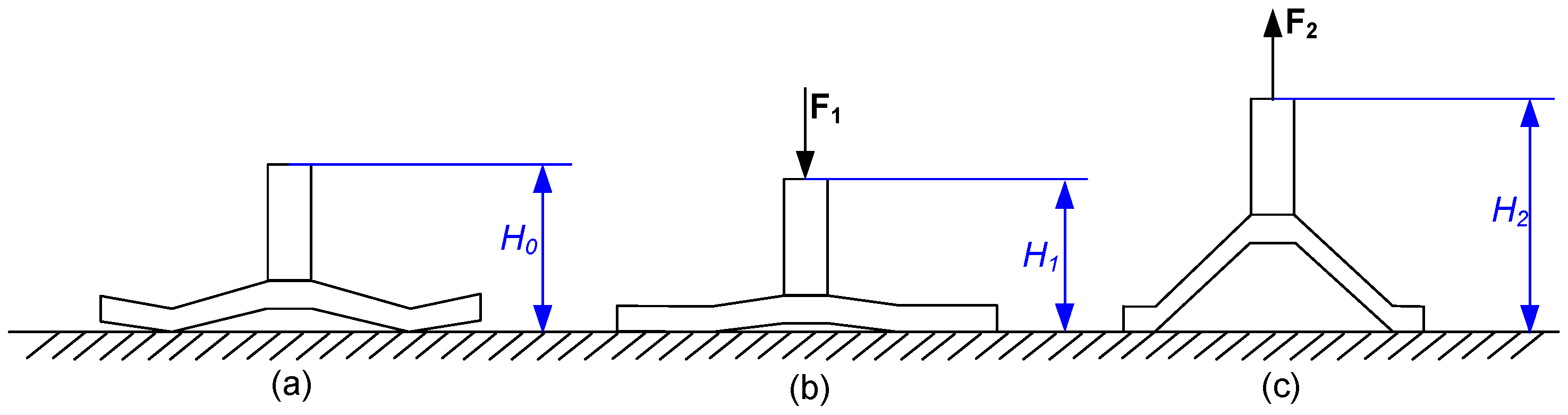
3.1. Suction Cup Properties
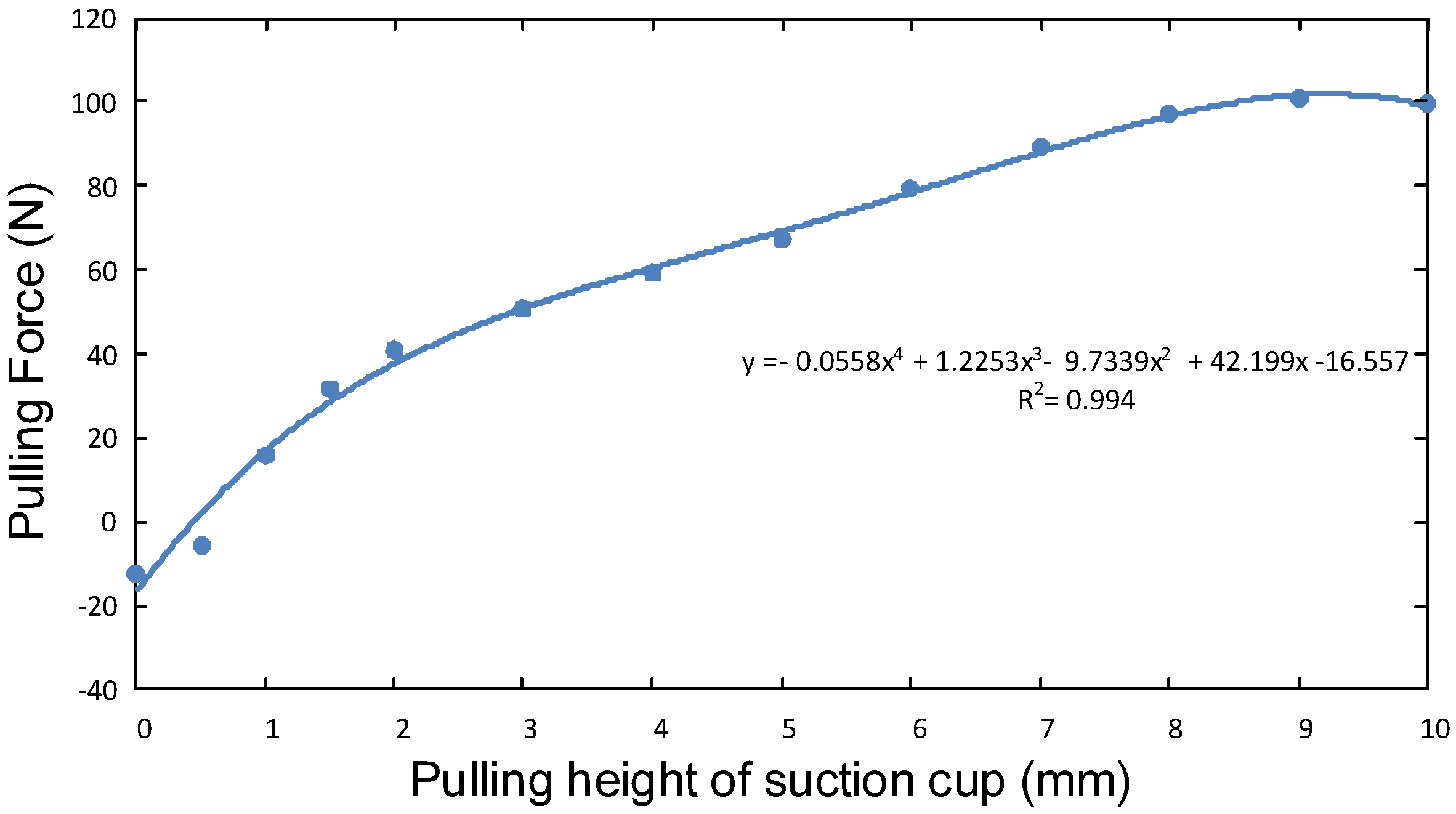
3.2. Experimental Methodology and Results
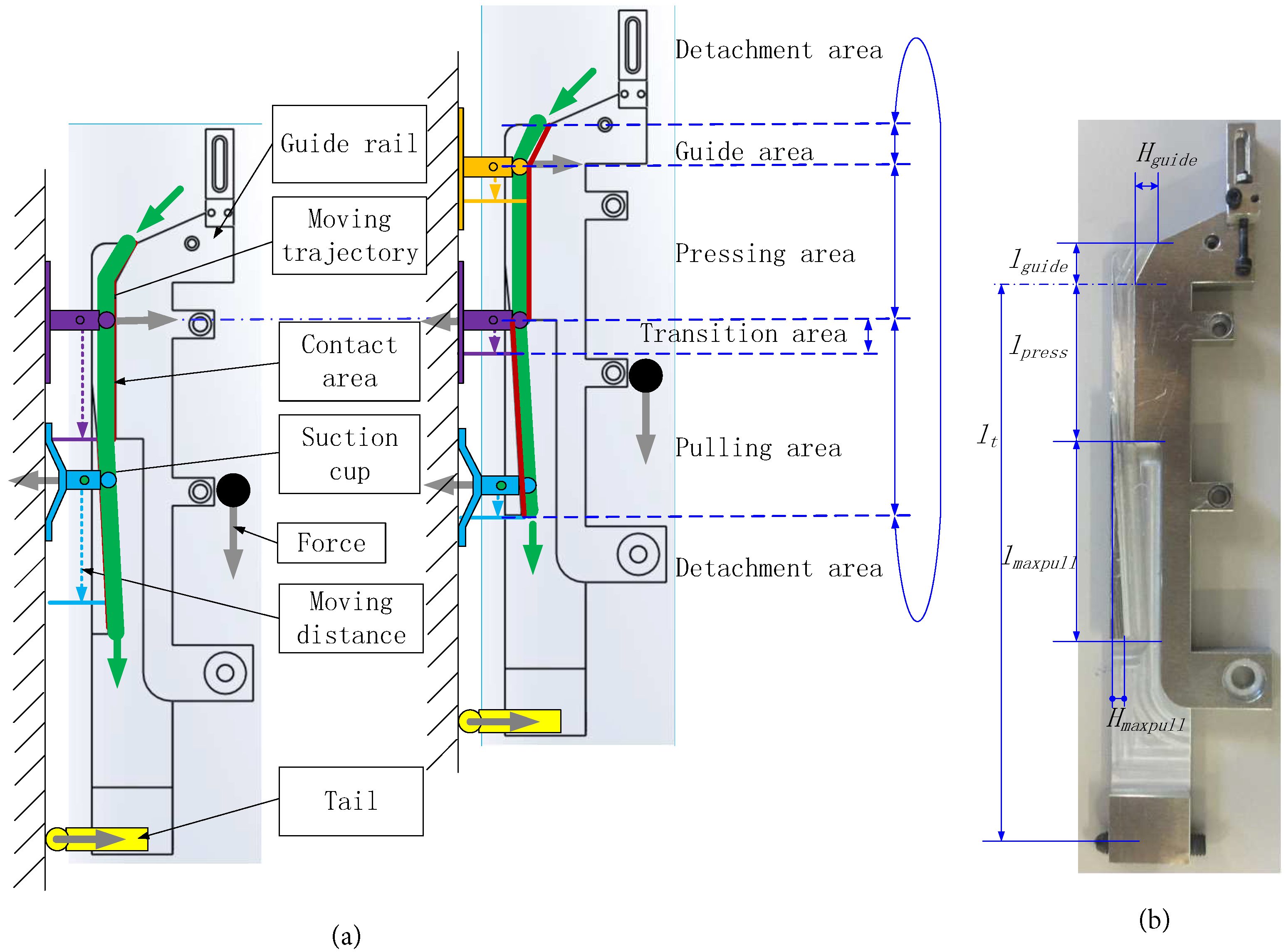
4. Guide Rail Design for the Proposed Pressing Method
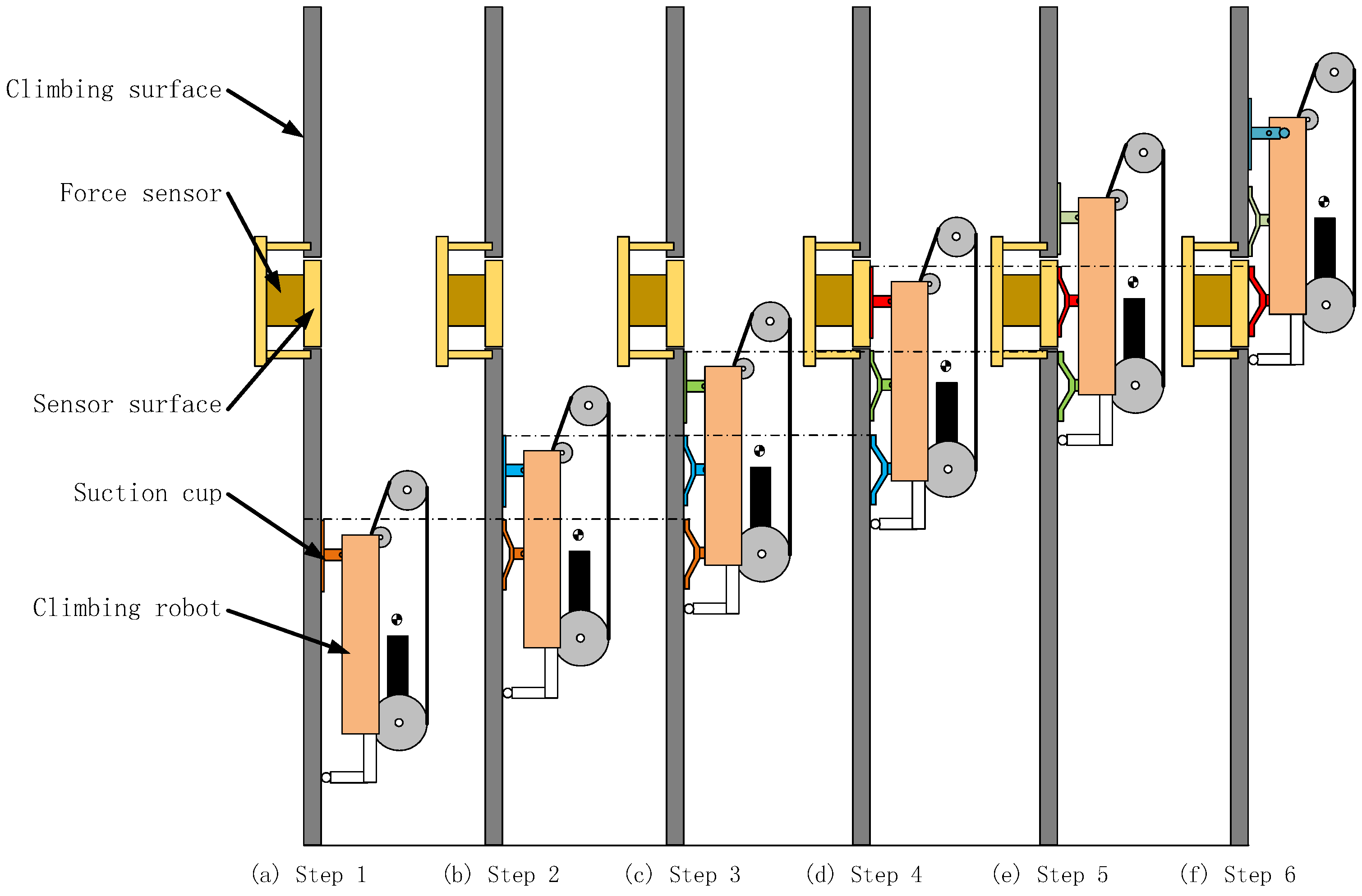
4.1. Functions Area of the Guide Rail
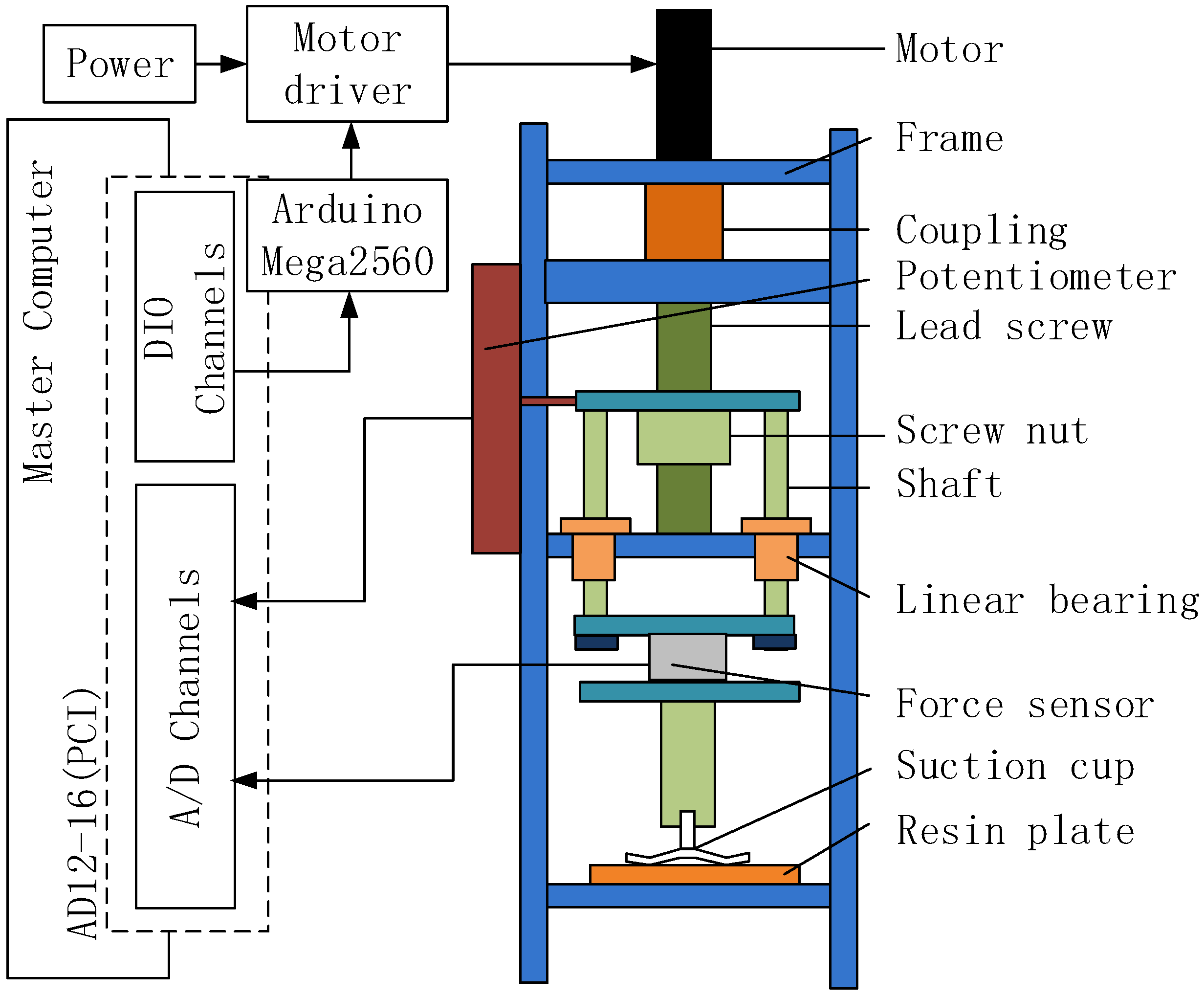
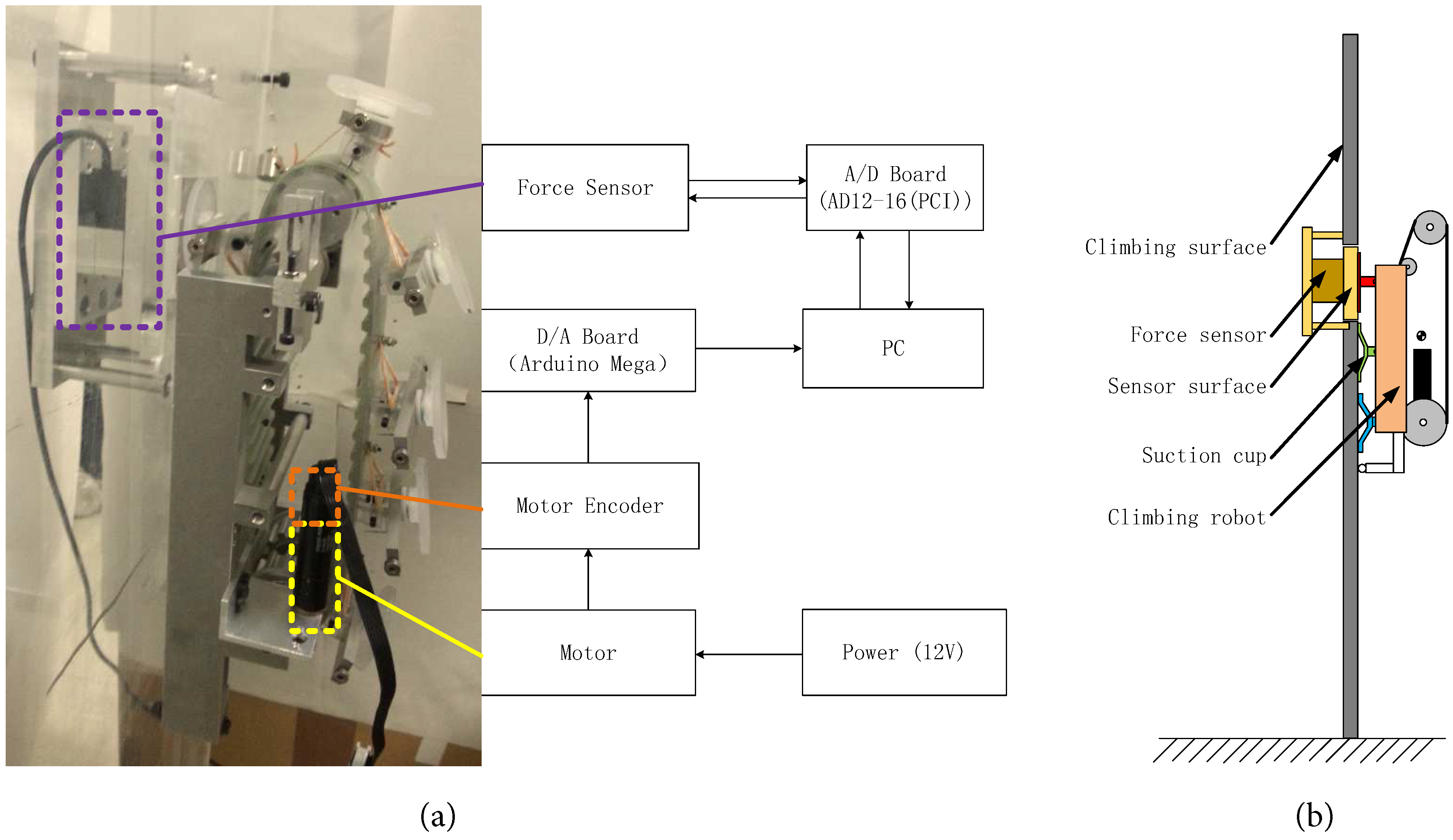
4.2. Experimental Setup
4.3. Experimental Methodology
4.4. Experimental Results and Discussion
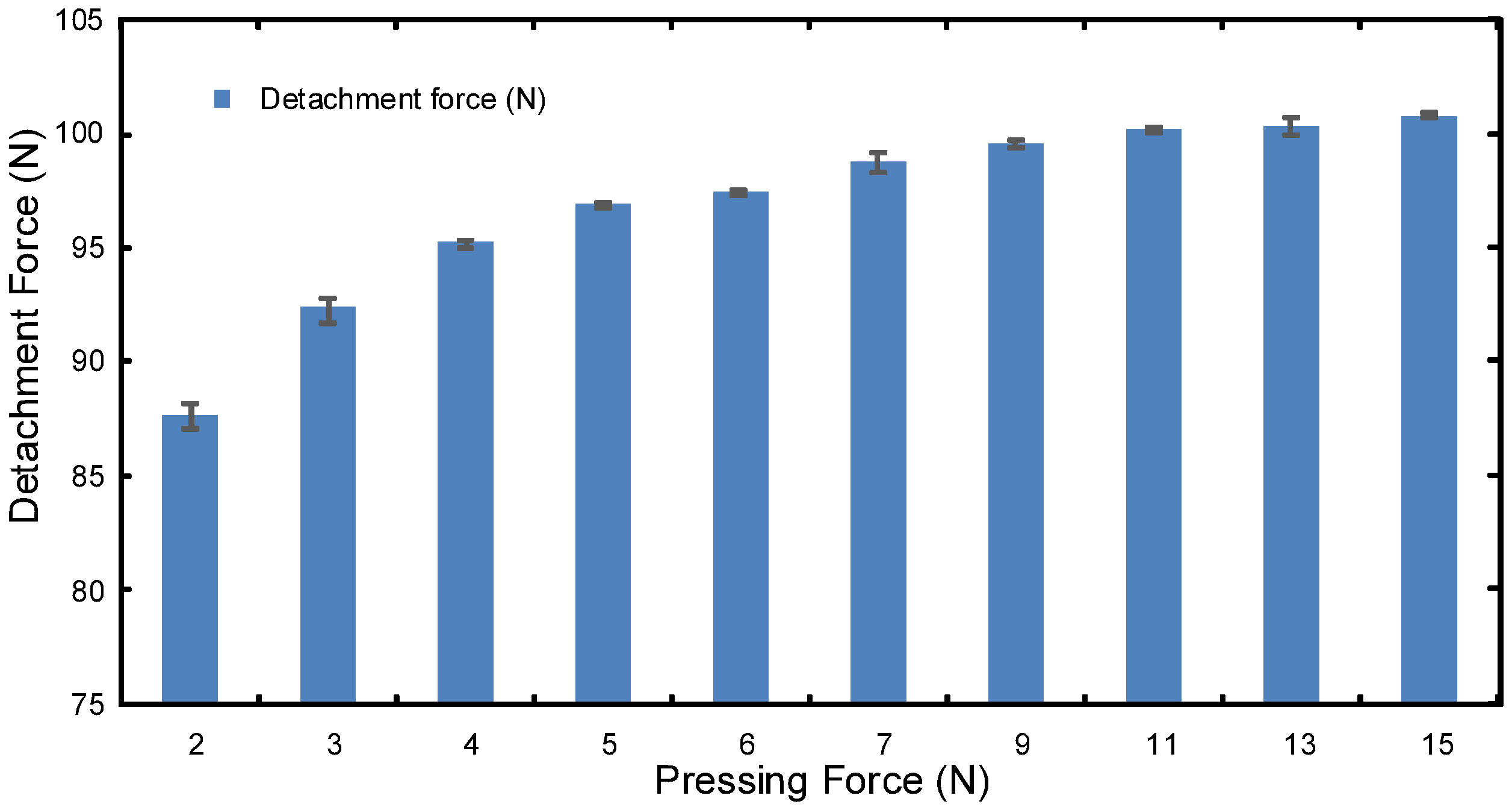
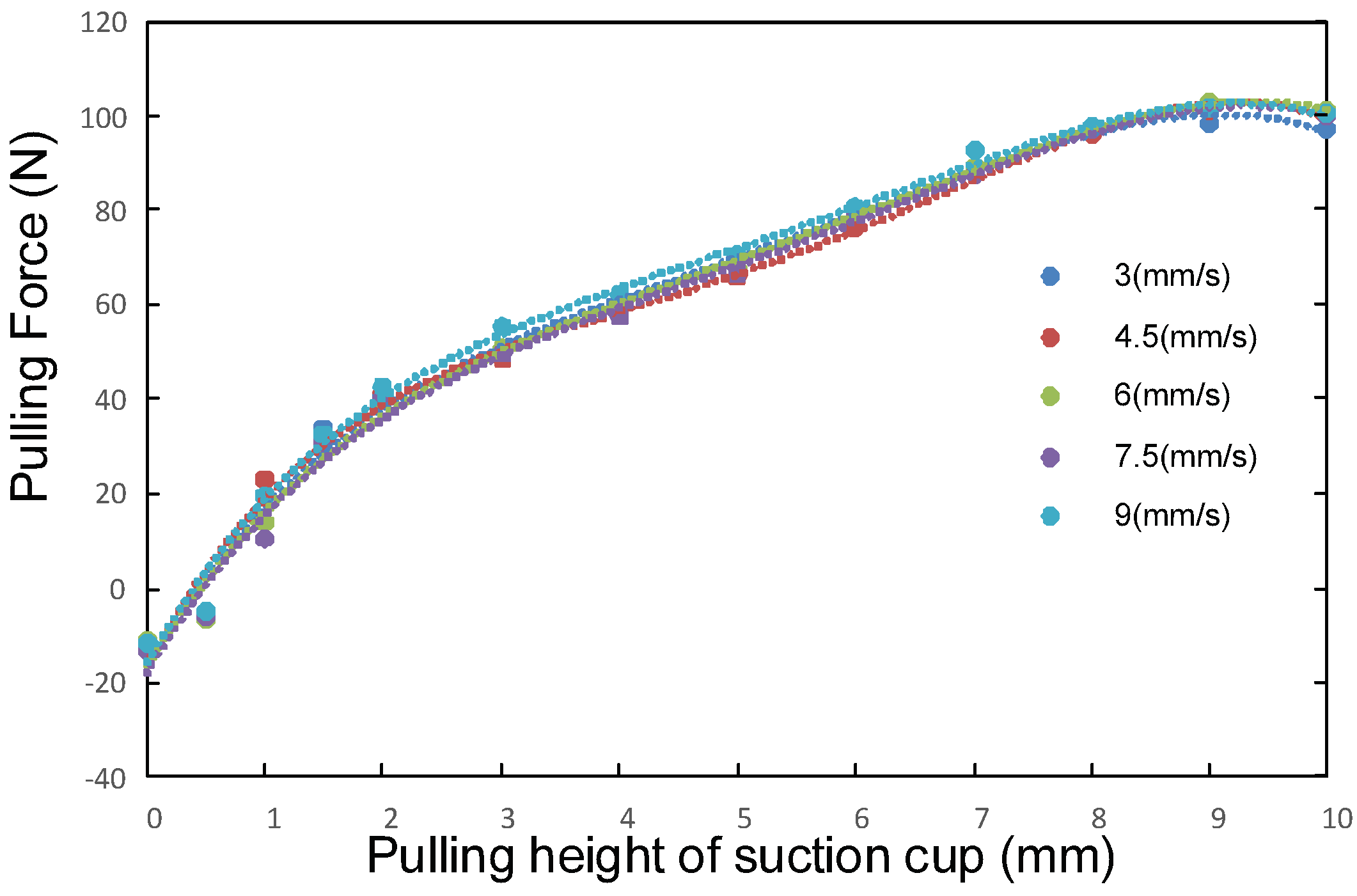
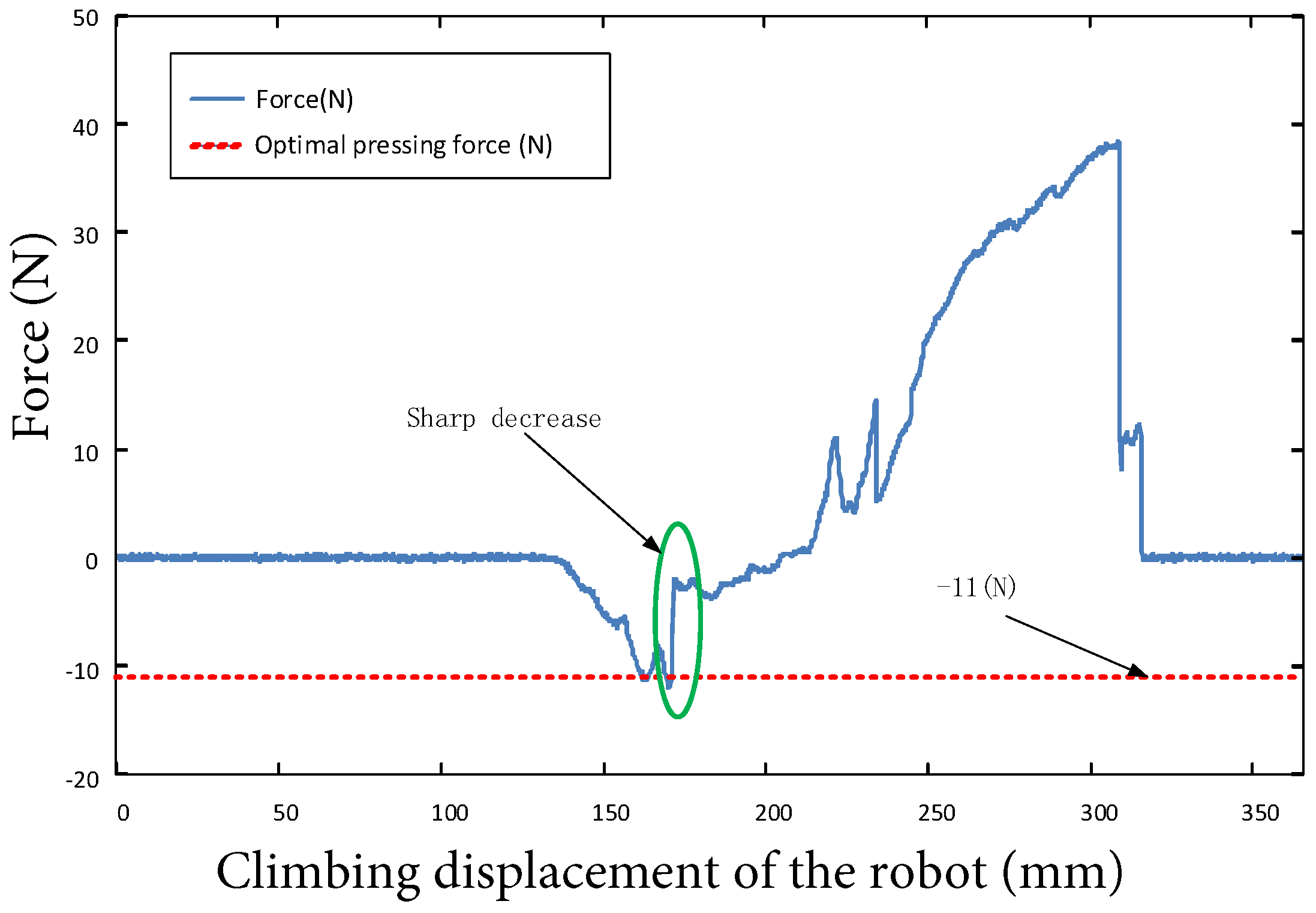
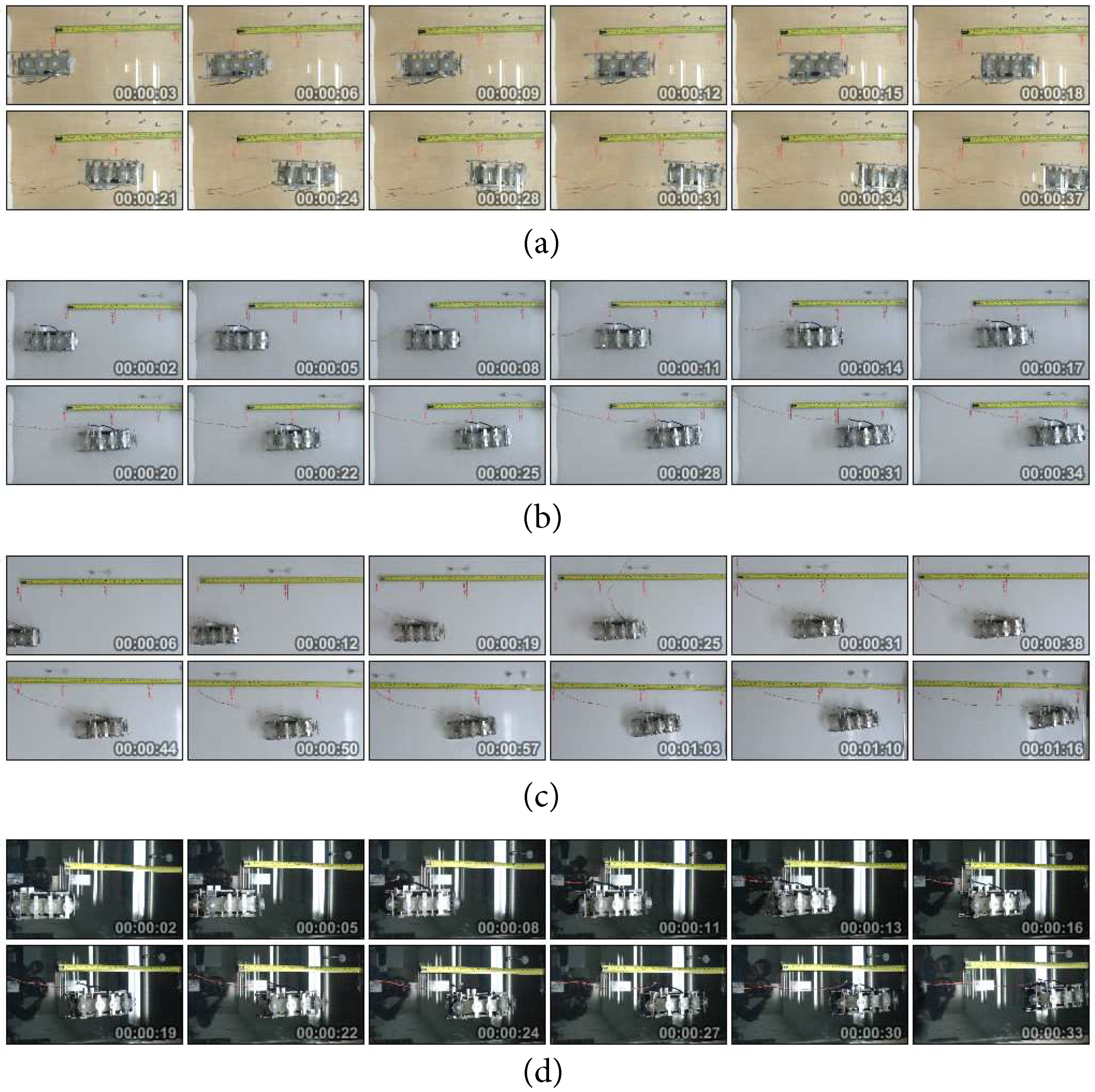
4.4.1. Experimental Results
4.4.2. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Yoshida, Y.; Ma, S. A Wall-Climbing Robot without any Active Suction Mechanisms. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 2014–2019. [Google Scholar]
- Murphy, M.; Sitti, M. Waalbot: An Agile Small-Scale Wall-Climbing Robot Utilizing Dry Elastomer Adhesives. IEEE/ASME Trans. Mechatron. 2007, 12, 330–338. [Google Scholar] [CrossRef]
- Nansai, S.; Mohan, R.E. A Survey of Wall Climbing Robots: Recent Advances and Challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef]
- Zhang, F.; Sun, X.; Li, Z.; Mohsin, I.; Wei, Y.; He, K. Influence of Processing Parameters on Coating Removal for High Pressure Water Jet Technology Based on Wall-Climbing Robot. Appl. Sci. 2020, 10, 1862. [Google Scholar] [CrossRef]
- Chen, X.; Wu, Y.; Hao, H.; Shi, H.; Huang, H. Tracked Wall-Climbing Robot for Calibration of Large Vertical Metal Tanks. Appl. Sci. 2019, 9, 2671. [Google Scholar] [CrossRef]
- Murphy, M.; Tso, W.; Tanzini, M.; Sitti, M. Waalbot: An Agile Small-Scale Wall-Climbing Robot Utilizing Pressure Sensitive Adhesives. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3411–3416. [Google Scholar]
- Seo, T.; Sitti, M. Under-Actuated Tank-Like Climbing Robot with Various Transitioning Capabilities. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 777–782. [Google Scholar]
- Tavakoli, M.; Viegas, C. Analysis and Application of Dual-Row Omnidirectional Wheels for Climbing Robots. Mechatronics 2014, 24, 436–448. [Google Scholar] [CrossRef]
- Osswald, M.; Iida, F. Design and Control of a Climbing Robot Based on Hot Melt Adhesion. Robot. Auton. Syst. 2013, 61, 616–625. [Google Scholar] [CrossRef]
- Kim, S.; Santos, D. Smooth Vertical Surface Climbing With Directional Adhesion. IEEE Trans. Mechatron. 2008, 24, 65–74. [Google Scholar]
- Zhao, Y.; Fu, Z.; Cao, Q.; Wang, Y. Development and applications of wall-climbing robots with a single suction cup. Robotica 2004, 22, 643–648. [Google Scholar] [CrossRef]
- Xu, Z.; Ma, P. A wall-climbing robot for labelling scale of oil tanks volume. Robotica 2002, 20, 209–212. [Google Scholar] [CrossRef]
- Seriani, S.; Scalera, L.; Caruso, M.; Gasparetto, A.; Gallina, P. Upside-Down Robots: Modeling and Experimental Validation of Magnetic-Adhesion Mobile Systems. Robotics 2019, 8, 41. [Google Scholar] [CrossRef]
- Li, Y.; Ahmed, A.; Sameoto, D.; Menon, C. Abigaille II: Toward the development of a spider-inspired climbing robot. Robotica 2012, 30, 79–89. [Google Scholar] [CrossRef]
- Provancher, W.; Jensen-Segal, S.; Fehlberg, M. ROCR: An Energy-Efficient Dynamic Wall-Climbing Robot. IEEE/ASME Trans. Mechatron. 2011, 16, 897–906. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Yang, H.; Lee, K.; Seo, K.; Chang, D.; Kim, J. Development of a Wall-Climbing Robot Using a Tracked Wheel Mechanism. J. Mech. Sci. Technol. 2008, 22, 1490–1498. [Google Scholar] [CrossRef]
- Shen, W.; Gu, J.; Shen, Y. Proposed Wall-Climbing Robot with Permanent Magnetic Tracks for Inspecting Oil Tanks. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; pp. 1274–1279. [Google Scholar]
- Daltorio, K.; Wei, T.; Gorb, S.; Ritzmann, R.; Quinn, R. Passive Foot Design and Contact Area Analysis for Climbing Mini-Whegs. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1274–1279. [Google Scholar]
- Liu, J.; Xu, L.; Chen, S.; Xu, H.; Cheng, G.; Xu, J. Development of a Bio-inspired Wall-Climbing Robot Composed of Spine Wheels, Adhesive Belts and Eddy Suction Cup. Robotica 2020, 1–20. [Google Scholar] [CrossRef]
- Wang, W.; Wu, S. A caterpillar climbing robot with spine claws and compliant structural modules. Robotica 2016, 34, 1553–1565. [Google Scholar] [CrossRef]
- Nansai, S.; Onodera, K.; Veerajagadheswar, P.; Rajesh Elara, M.; Iwase, M. Design and Experiment of a Novel Façade Cleaning Robot with a Biped Mechanism. Appl. Sci. 2018, 8, 2398. [Google Scholar] [CrossRef]
- Schmidt, D.; Hillenbr, C.; Berns, K. Omnidirectional locomotion and traction control of the wheel-driven, wall-climbing robot. Robotica 2011, 29, 991–1003. [Google Scholar] [CrossRef]
- Kim, T.; Seo, K.; Kim, J.; Kim, H.S. Adaptive impedance control of a cleaning unit for a novel wall-climbing mobile robotic platform (ROPE RIDE). In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014. [Google Scholar]
- Schoeneich, P.; Rochat, F.; Nguyen, O.T.; Moser, R.; Mondada, F. TRIPILLAR: A miniature magnetic caterpillar climbing robot with plane transition ability. Robotica 2011, 29, 1075–1081. [Google Scholar] [CrossRef]
- Ge, D.; Ren, C.; Matsuno, T.; Ma, S. Guide Rail Design for a Passive Suction Cup based Wall-Climbing Robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5776–5781. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | |||||
|---|---|---|---|---|---|
| 12.5 (mm) | 2 (mm) | 25 (mm) | 22.5 (mm) | Silicon | 5.6 (g) |
| 220 (mm) | 15 (mm) | 55 (mm) | 70 (mm) | 10 (mm) | 4 (mm) |
| Length | Width | Height | Weight | Maximum Velocity | Maximum Pulling Force | Actuator |
|---|---|---|---|---|---|---|
| 300 (mm) | 122 (mm) | 290 (mm) | 1.26 (kg) | 18.5 (mm/s) | 84 (N) | DC-motor × 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, D.; Tang, Y.; Ma, S.; Matsuno, T.; Ren, C. A Pressing Attachment Approach for a Wall-Climbing Robot Utilizing Passive Suction Cups. Robotics 2020, 9, 26. https://doi.org/10.3390/robotics9020026
Ge D, Tang Y, Ma S, Matsuno T, Ren C. A Pressing Attachment Approach for a Wall-Climbing Robot Utilizing Passive Suction Cups. Robotics. 2020; 9(2):26. https://doi.org/10.3390/robotics9020026
Chicago/Turabian StyleGe, Dingxin, Yongchen Tang, Shugen Ma, Takahiro Matsuno, and Chao Ren. 2020. "A Pressing Attachment Approach for a Wall-Climbing Robot Utilizing Passive Suction Cups" Robotics 9, no. 2: 26. https://doi.org/10.3390/robotics9020026
APA StyleGe, D., Tang, Y., Ma, S., Matsuno, T., & Ren, C. (2020). A Pressing Attachment Approach for a Wall-Climbing Robot Utilizing Passive Suction Cups. Robotics, 9(2), 26. https://doi.org/10.3390/robotics9020026