The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Contributions
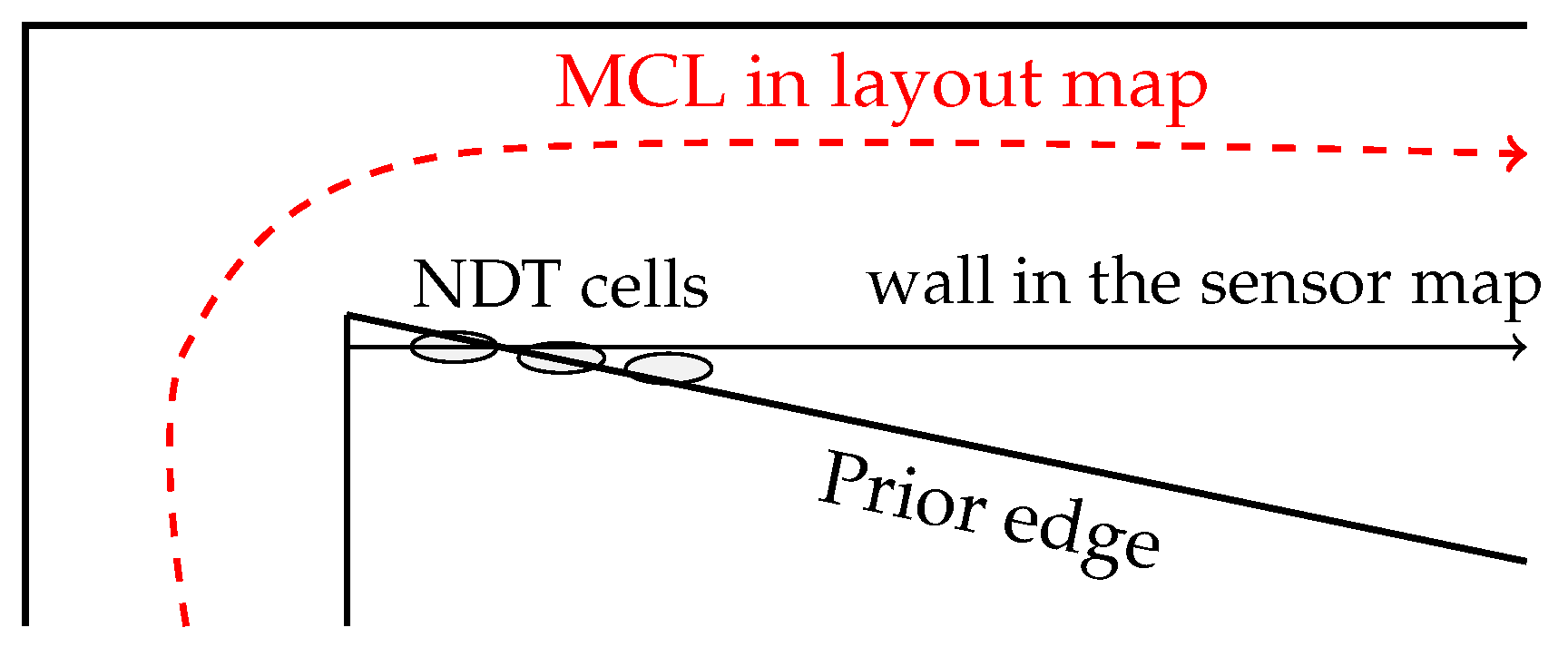
- We adapt Monte-Carlo localization (MCL) in normal distribution transform occupancy maps (NDT-OM) to be able to localize the robot in a layout map with uncertainty in scale and detail level. Our version of the MCL filter localizes the robot in the emergency map while handling the layout map uncertainty, adapting the MCL sensor model to use the Euclidean distance instead of the -norm. It also uses a larger neighborhood of cells than a classic MCL implementation [4] when looking at how a laser scan fits the model map, hence adapting to the local scaling errors and missing information.
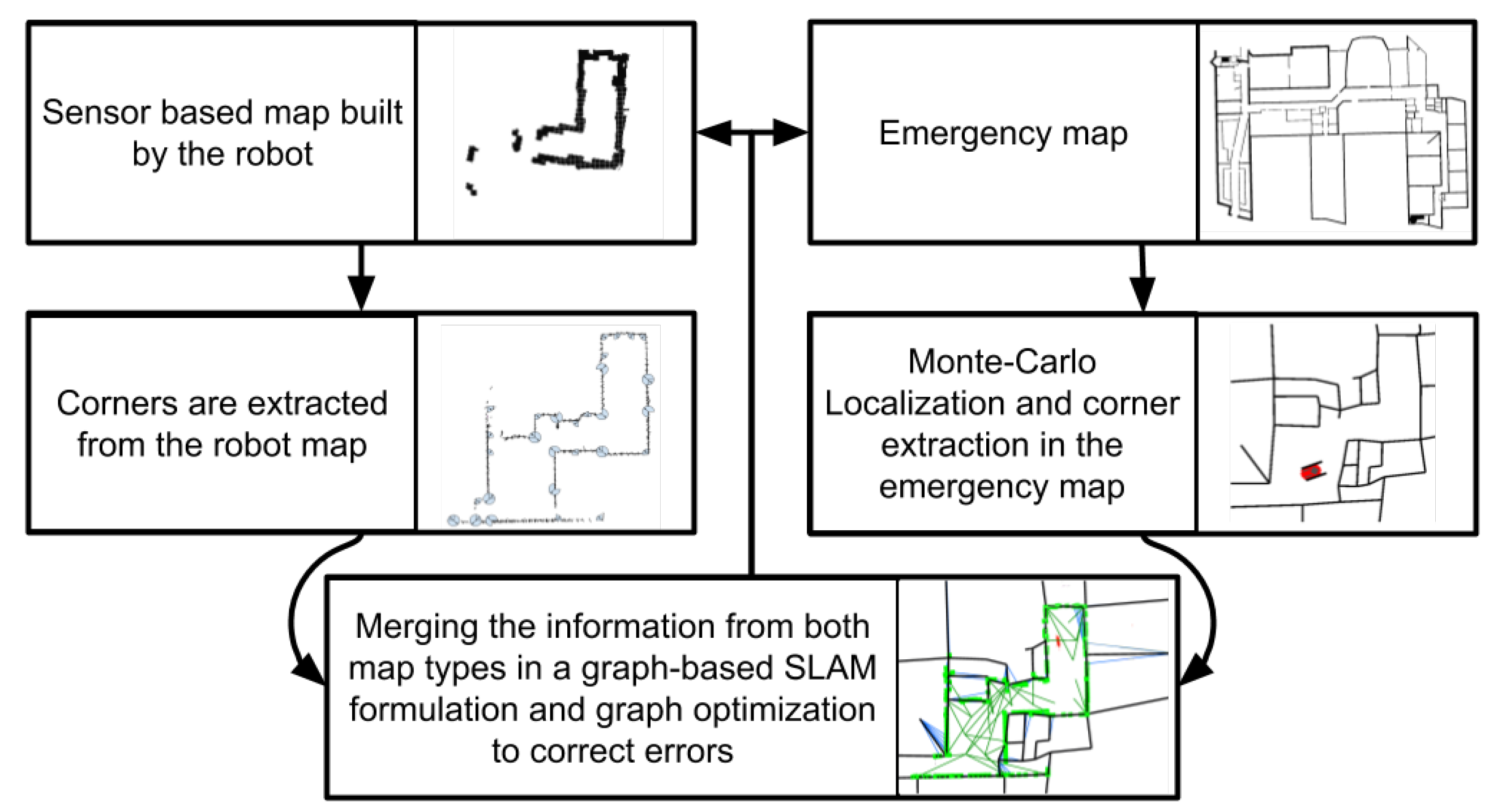
- A matching method for corners and walls from a layout map and a robot-built map, based on the -norm, and the MCL pose estimate in the emergency map. The matches found are used in the graph-based SLAM representation to merge information from both the sensor and layout maps into one consistent representation.
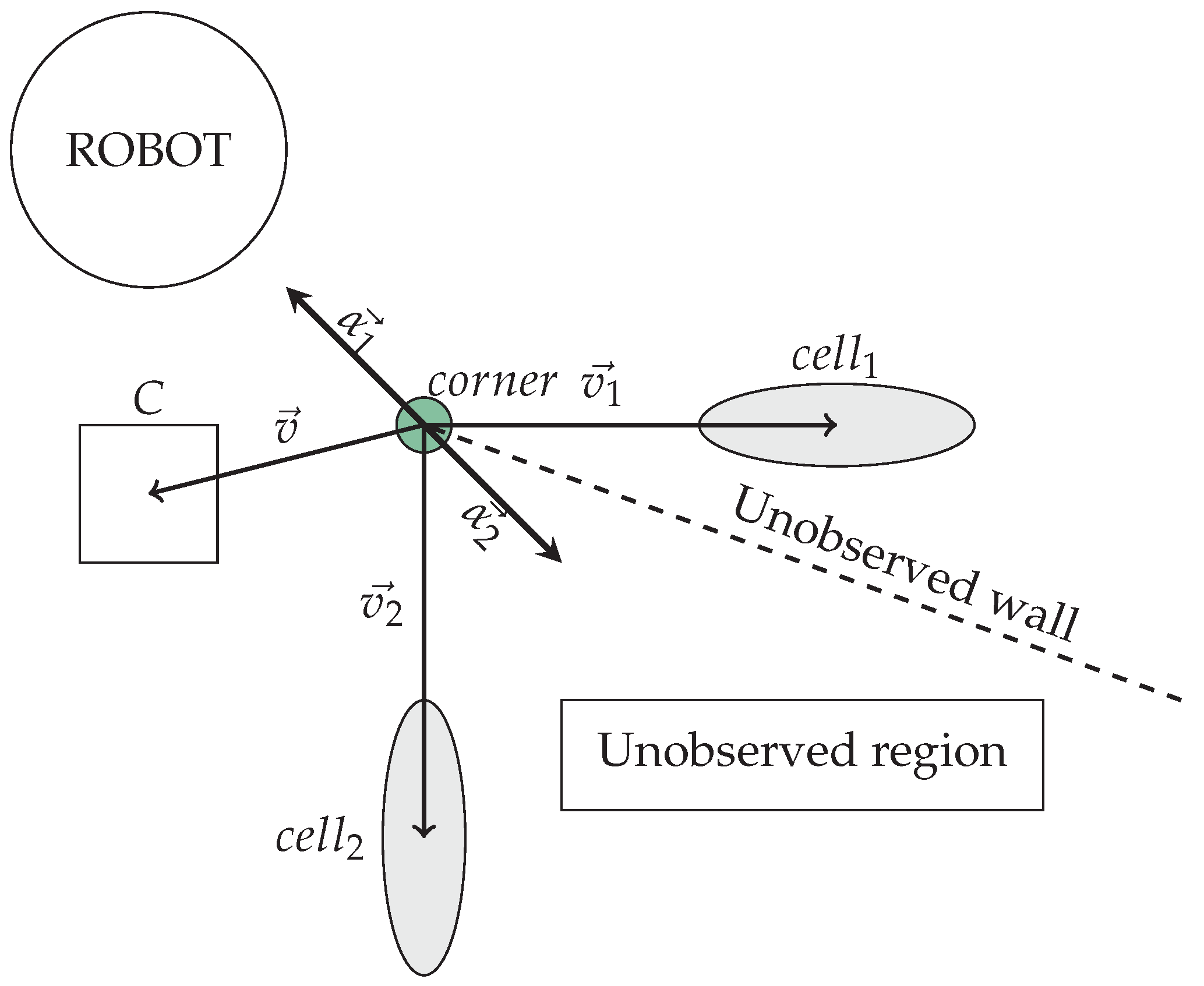
- A method to determine the orientation and angle of corners in NDT-OM. Those attributes are used to decrease the number of incorrect corner matches used in the SLAM-based graph representation.
3. Related Work
3.1. Map Matching Approaches
3.2. Localization in Prior Maps
4. Graph Based SLAM with a Layout Map as Prior
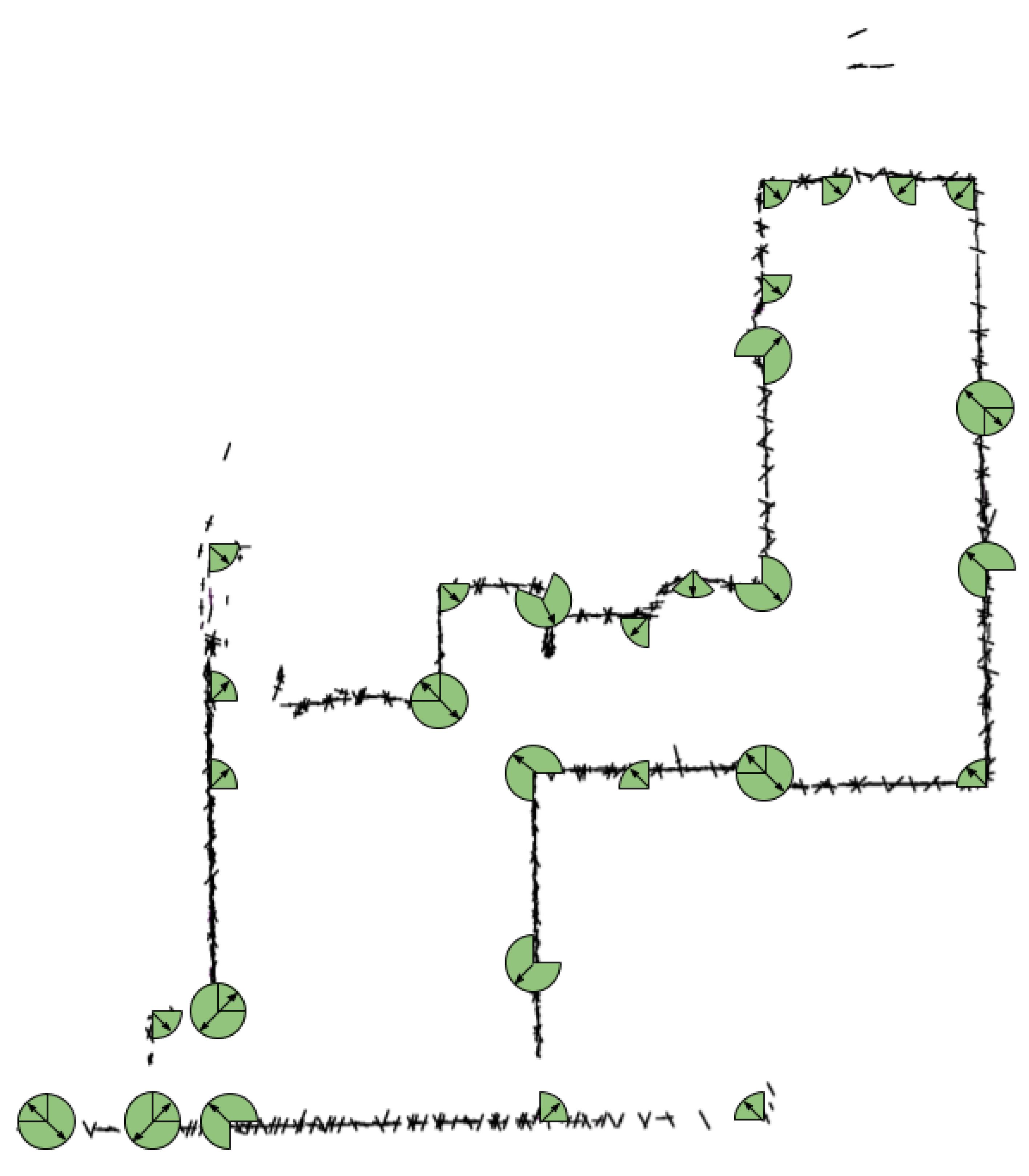
4.1. Mapping and Corner Extraction in NDT Maps
| Algorithm 1: Algorithm to find corners and their attributes around a cell in an NDT-OM map. |
 |
4.2. Feature Extraction and Robot Localization in the Layout Map
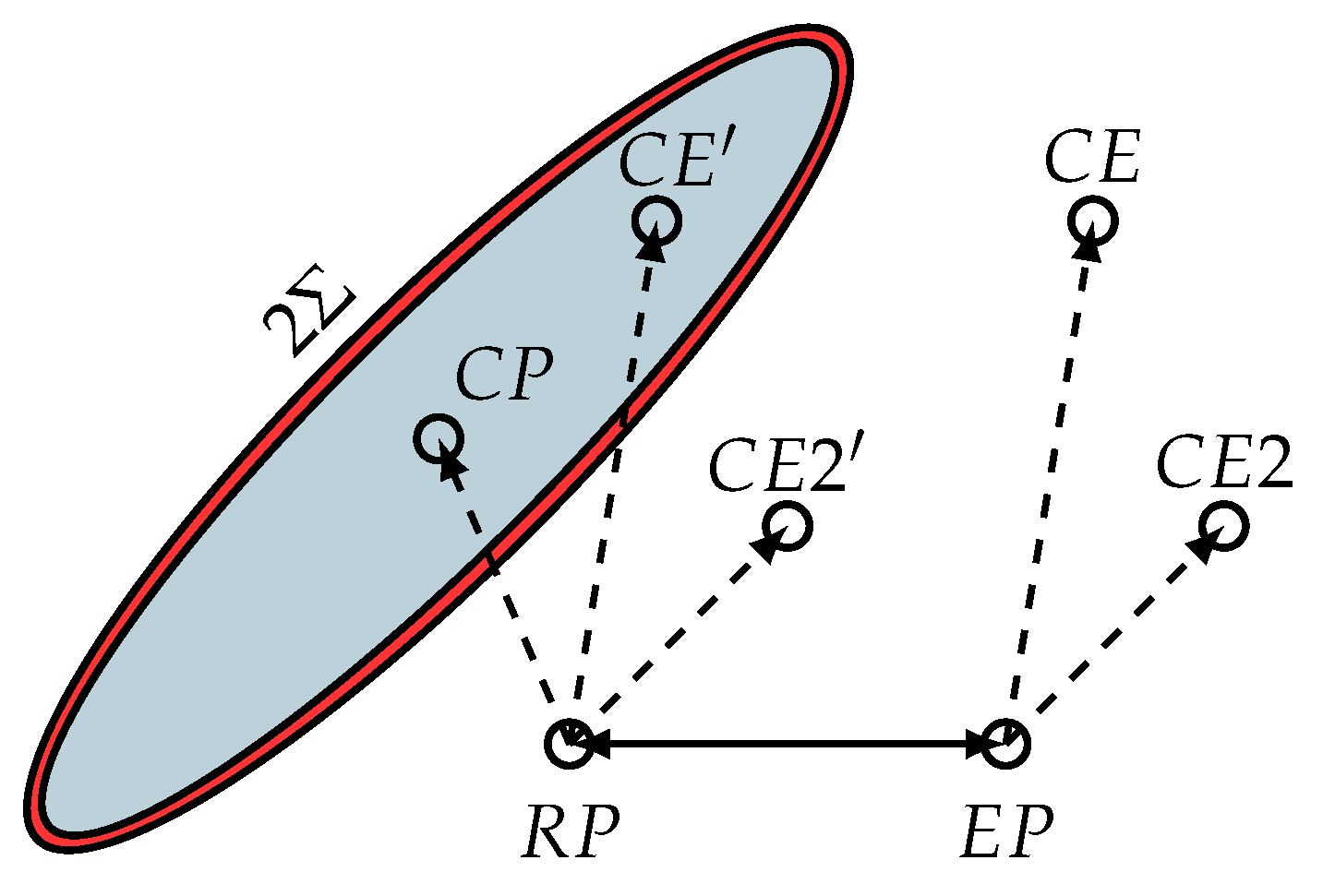
4.3. Map and Corner Association
| Algorithm 2: Algorithm returning the shortest vector from a point to a segment. |
 |
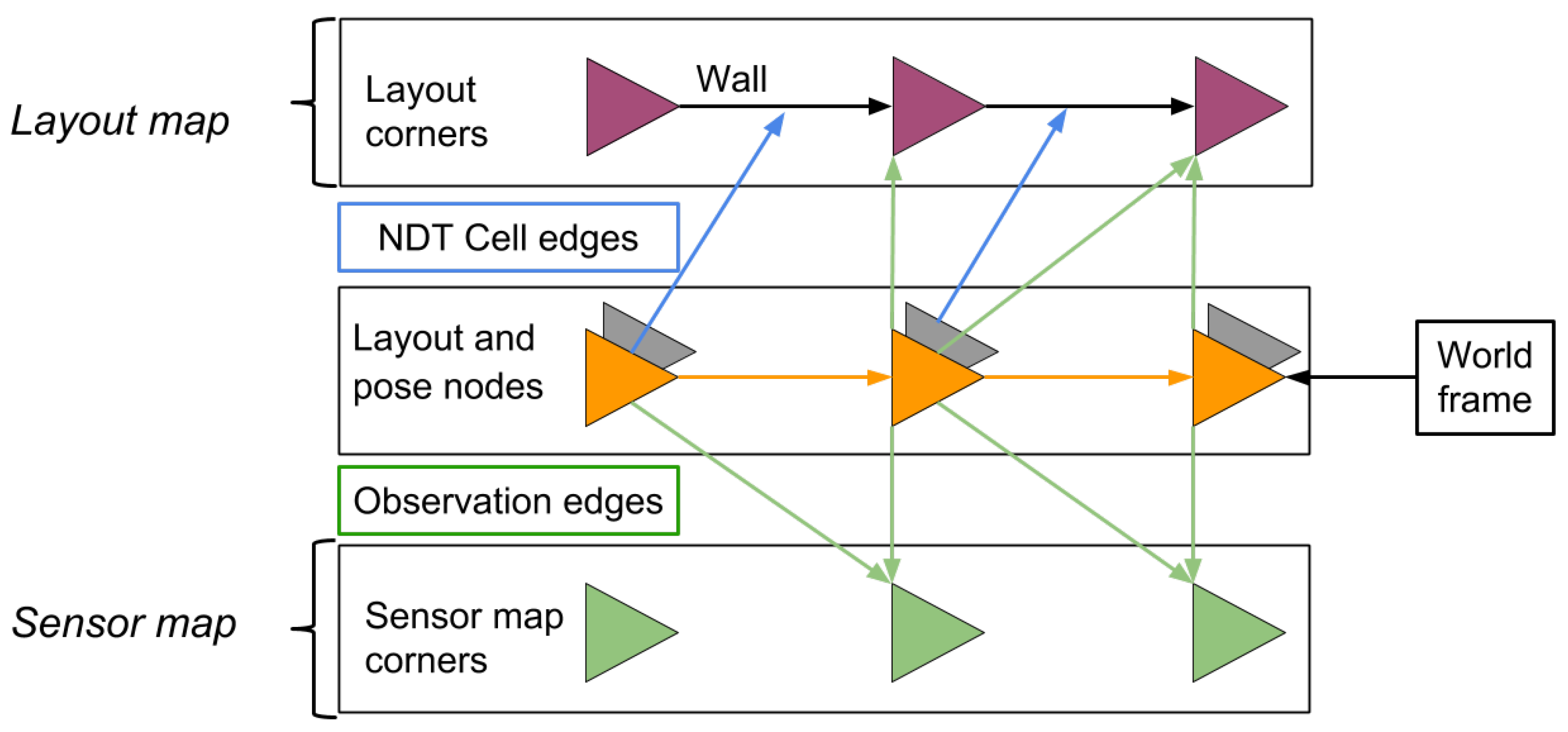
4.4. Graph SLAM Optimization
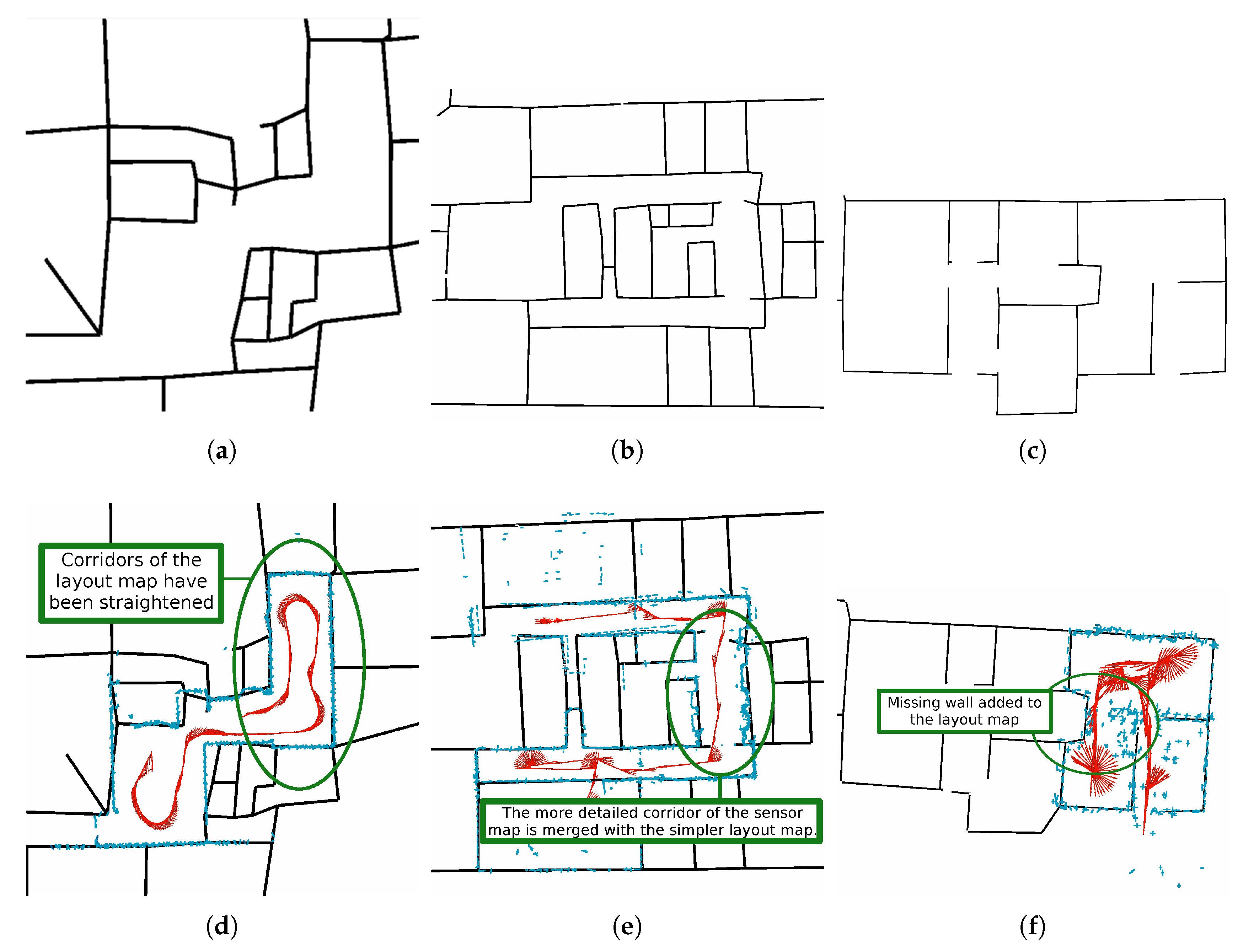
5. Experiments
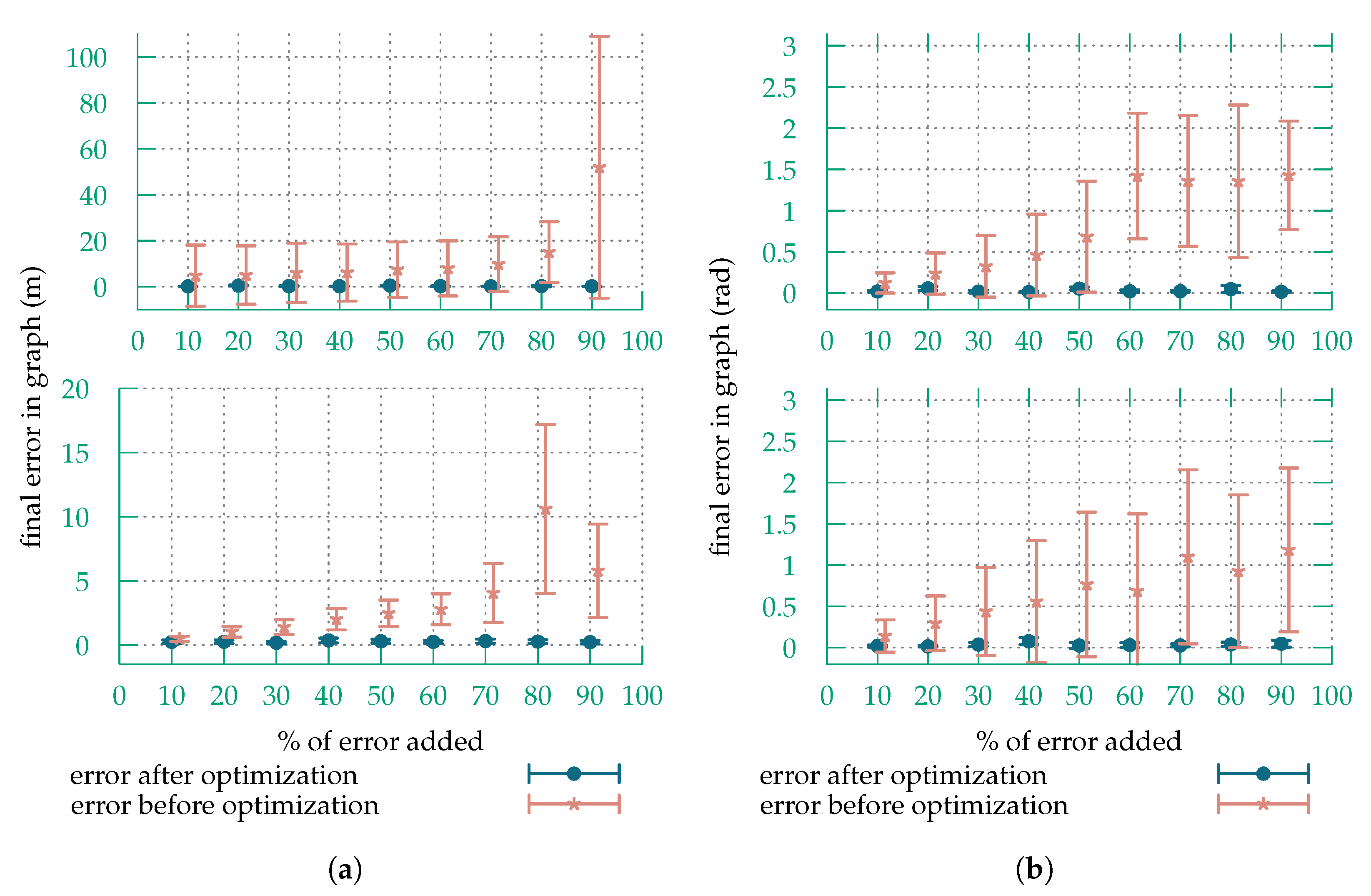
5.1. Robustness
5.2. Runtime Performance
5.3. Field Tests
6. Summary
Author Contributions
Funding
Conflicts of Interest
References
- Mielle, M.; Magnusson, M.; Andreasson, H.; Lilienthal, A.J. SLAM auto-complete: Completing a robot map using an emergency map. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 35–40. [Google Scholar] [CrossRef]
- Agarwal, P.; Tipaldi, G.D.; Spinello, L.; Stachniss, C.; Burgard, W. Robust map optimization using dynamic covariance scaling. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 62–69. [Google Scholar] [CrossRef]
- Agarwal, P. Robust Graph-Based Localization and Mapping. Ph.D. Thesis, University of Freiburg, Freiburg, Germany, 2015. [Google Scholar]
- Saarinen, J.; Andreasson, H.; Stoyanov, T.; Lilienthal, A.J. Normal distributions transform Monte-Carlo localization (NDT-MCL). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 382–389. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. Using sketch-maps for robot navigation: Interpretation and matching. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 252–257. [Google Scholar] [CrossRef]
- Freksa, C.; Moratz, R.; Barkowsky, T. Schematic Maps for Robot Navigation. In Spatial Cognition II; Springer: Berlin/Heidelberg, Germany, 2000; pp. 100–114. [Google Scholar] [CrossRef]
- Gholami Shahbandi, S.; Magnusson, M. 2D map alignment with region decomposition. Auton. Robots 2018. [Google Scholar] [CrossRef]
- Shahbandi, S.G.; Magnusson, M.; Iagnemma, K. Nonlinear Optimization of Multimodal Two-Dimensional Map Alignment With Application to Prior Knowledge Transfer. IEEE Robot. Autom. Lett. 2018, 3, 2040–2047. [Google Scholar] [CrossRef]
- Parsley, M.P.; Julier, S.J. Exploiting prior information in GraphSLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2638–2643. [Google Scholar] [CrossRef]
- Vysotska, O.; Stachniss, C. Exploiting building information from publicly available maps in graph-based SLAM. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 4511–4516. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–607. [Google Scholar] [CrossRef]
- Henein, M.; Abello, M.; Ila, V.; Mahony, R. Exploring the effect of meta-structural information on the global consistency of SLAM. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1616–1623. [Google Scholar] [CrossRef]
- Javanmardi, M.; Javanmardi, E.; Gu, Y.; Kamijo, S. Towards High-Definition 3D Urban Mapping: Road Feature-Based Registration of Mobile Mapping Systems and Aerial Imagery. Remote Sens. 2017, 9, 975. [Google Scholar] [CrossRef]
- Kümmerle, R.; Steder, B.; Dornhege, C.; Kleiner, A.; Grisetti, G.; Burgard, W. Large scale graph-based SLAM using aerial images as prior information. Auton. Robots 2011, 30, 25–39. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M. Depth camera based indoor mobile robot localization and navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1697–1702. [Google Scholar] [CrossRef]
- Hanten, R.; Buck, S.; Otte, S.; Zell, A. Vector-AMCL: Vector based Adaptive Monte Carlo Localization for Indoor Maps. In Advances in Intelligent Systems and Computing; Springer: Berlin, Germany, 2016; Volume 531. [Google Scholar] [CrossRef]
- Boniardi, F.; Caselitz, T.; Kümmerle, R.; Burgard, W. Robust LiDAR-based localization in architectural floor plans. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3318–3324. [Google Scholar] [CrossRef]
- Salehi, A.; Gay-bellile, V.; Bourgeois, S.; Allezard, N.; Chausse, F. Large-scale, drift-free SLAM using highly robustified building model constraints. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1586–1593. [Google Scholar] [CrossRef]
- Kim, J.; Cho, Y.; Kim, J. Vehicle Localization in Urban Environment Using a 2D Online Map with Building Outlines. In Proceedings of the 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 586–590. [Google Scholar] [CrossRef]
- Stoyanov, T.; Saarinen, J.; Andreasson, H.; Lilienthal, A.J. Normal Distributions Transform Occupancy Map fusion: Simultaneous mapping and tracking in large scale dynamic environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4702–4708. [Google Scholar] [CrossRef]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan Registration for Autonomous Mining Vehicles Using 3D-NDT: Research Articles. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef]
- Magnusson, M.; Vaskevicius, N.; Stoyanov, T.; Pathak, K.; Birk, A. Beyond points: Evaluating recent 3D scan-matching algorithms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3631–3637. [Google Scholar] [CrossRef]
- Stoyanov, T.; Magnusson, M.; Andreasson, H.; Lilienthal, A.J. Path planning in 3D environments using the Normal Distributions Transform. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3263–3268. [Google Scholar] [CrossRef]
- Stoyanov, T.; Magnusson, M.; Lilienthal, A.J. Point set registration through minimization of the L2 distance between 3D-NDT models. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 5196–5201. [Google Scholar] [CrossRef]
- De las Heras, L.P.; Ahmed, S.; Liwicki, M.; Valveny, E.; Sánchez, G. Statistical segmentation and structural recognition for floor plan interpretation: Notation invariant structural element recognition. Int. J. Doc. Anal. Recogn. (IJDAR) 2014, 17, 221–237. [Google Scholar] [CrossRef]
- Ahmed, S.; Liwicki, M.; Weber, M.; Dengel, A. Automatic Room Detection and Room Labeling from Architectural Floor Plans. In Proceedings of the 10th IAPR International Workshop on Document Analysis Systems, Gold Cost, QLD, Australia, 27–29 March 2012; pp. 339–343. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. Örebro University Basement SLAM Dataset—Radar; Velodyne: San Jose, CA, USA, 2018. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. Hannover University SLAM Dataset—Radar; Velodyne: San Jose, CA, USA, 2018. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. Dortmund SLAM Dataset—Radar; Velodyne: San Jose, CA, USA, 2018. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. A Method to Segment Maps from Different Modalities Using Free Space Layout MAORIS: Map of Ripples Segmentation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 4993–4999. [Google Scholar] [CrossRef]
- Fritsche, P.; Kueppers, S.; Briese, G.; Wagner, B. Radar and LiDAR Sensorfusion in Low Visibility Environments. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics—Volume 2: ICINCO; SciTePress: Setubal, Portugal, 2016; pp. 30–36. [Google Scholar] [CrossRef]
- Nowok, S.; Kueppers, S.; Cetinkaya, H.; Schroeder, M.; Herschel, R. Millimeter wave radar for high resolution 3D near field imaging for robotics and security scans. In Proceedings of the 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–10. [Google Scholar] [CrossRef]
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mielle, M.; Magnusson, M.; Lilienthal, A.J. The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM. Robotics 2019, 8, 40. https://doi.org/10.3390/robotics8020040
Mielle M, Magnusson M, Lilienthal AJ. The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM. Robotics. 2019; 8(2):40. https://doi.org/10.3390/robotics8020040
Chicago/Turabian StyleMielle, Malcolm, Martin Magnusson, and Achim J. Lilienthal. 2019. "The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM" Robotics 8, no. 2: 40. https://doi.org/10.3390/robotics8020040
APA StyleMielle, M., Magnusson, M., & Lilienthal, A. J. (2019). The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM. Robotics, 8(2), 40. https://doi.org/10.3390/robotics8020040