1. Introduction
The idea of our study was to optimize the automated focus algorithm—in this case, a variation of the contrast detection method [
1]—of a product for its performance in various scenarios. As the system was a high-end product in the document digitalization and presentation business, usability and user experience were very important. According to Shneiderman, Plaisant, Cohen, Jacobs, Elmqvist, and Diakopoulos [
2], the first of their “8 golden rules for usability” is to “strive for consistency”. Also according to them, systems that cannot do their work will not be used, whereas systems that work faster than others will be preferred. To improve the system appropriately, it became necessary to test the algorithm in a wide range of objective scenarios, which could then be interpreted by the respective developers. We generated a dataset of 294 scenarios, attempting to simulate as many actual use cases for the camera as possible. They were the product of 14 movements, 7 patterns, and 3 zoom levels. Reliability and speed were the two most important factors for the autofocus algorithm [
3,
4,
5]. As manual validation of these scenarios was unfeasible, i.e., humans are unable to exactly repeat the various movements, we developed a setup which could be used to benchmark different versions of the algorithm of the camera. To achieve this, we equipped a robot adequately and programmed it to do the movements typical for presentation tasks while logging the state of the lenses on a computer. The basic idea itself was very similar to that of Bi, Pomalaza-Ráez, Hershberger, Dawson, Lehman, Yurek, and Ball [
6] who used automated actuators to test electrical cable harnesses and logged the resulting signals on an external station. As opposed to their tests of wires with a simple fail/pass result, we also needed to classify the resulting data accordingly. The results from a first measurement confirmed our assumption of scenarios where deficits existed. This knowledge was used to change the parameters of the autofocus, striving for more consistency. Adapting the algorithm appropriately led to an improved performance in the second measurement.
2. Materials and Methods
For this study, we used several hardware and software components that are described in the following subsections.
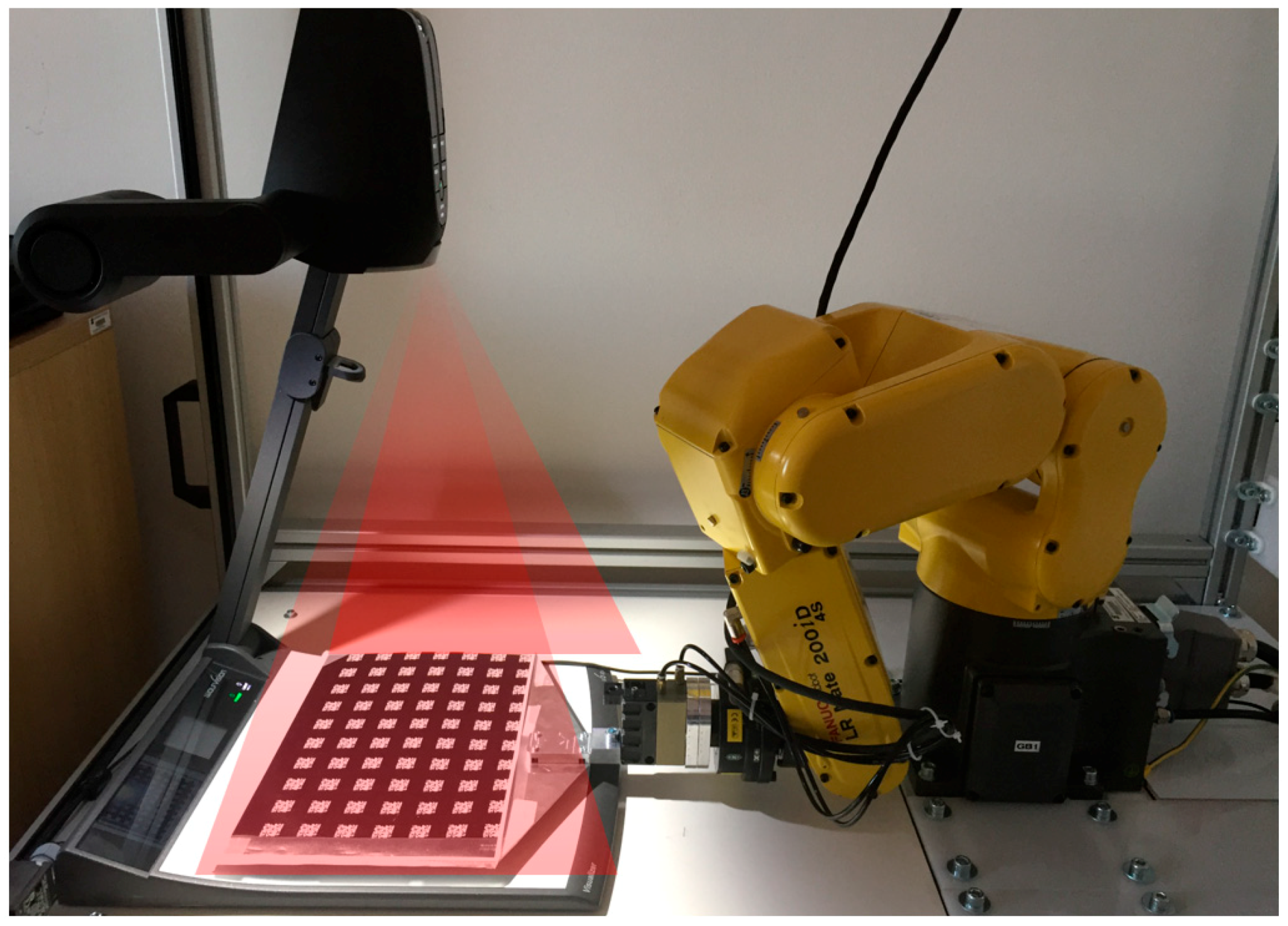
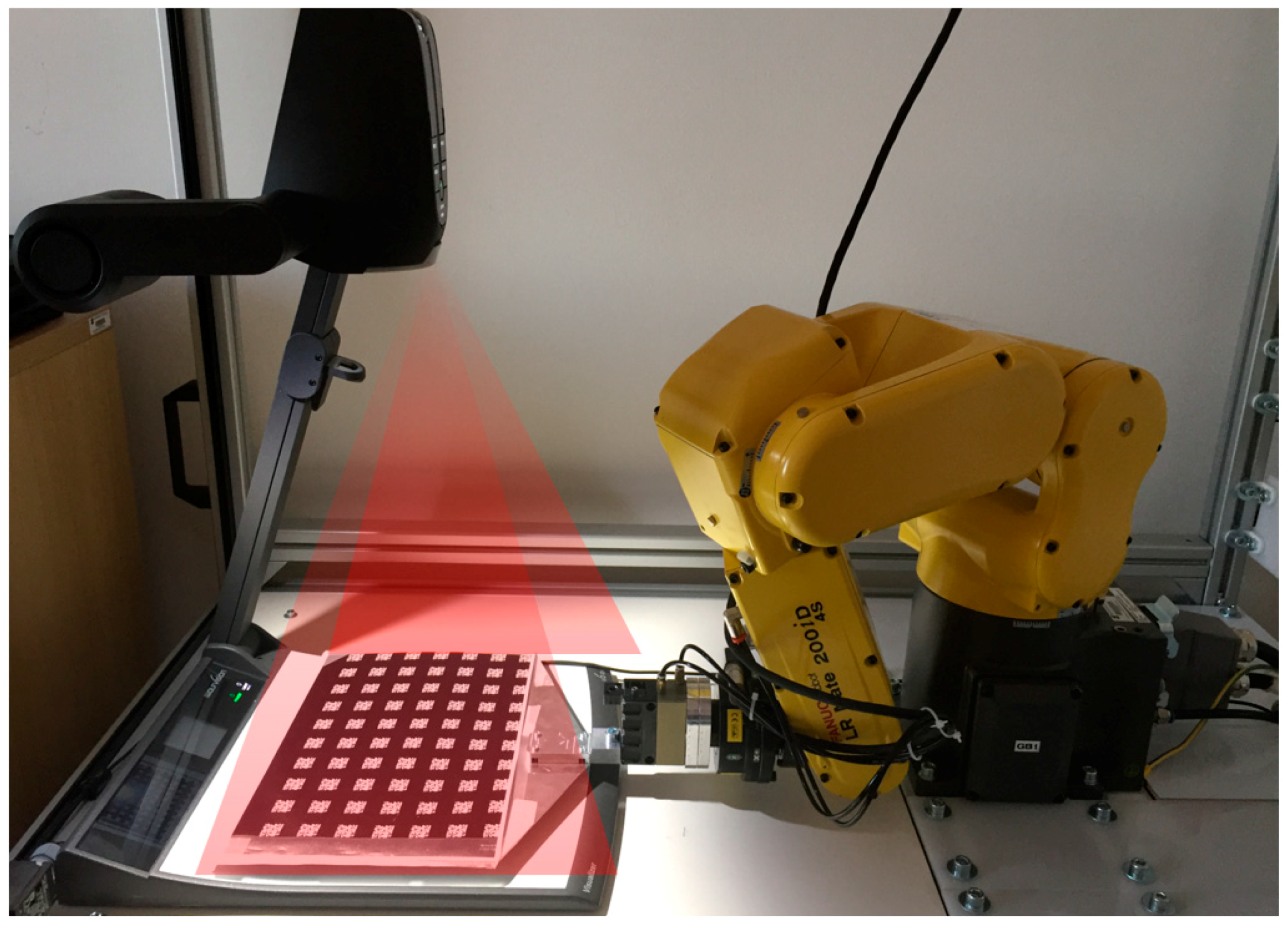
Figure 1 shows the setup at the robot’s most frequent position (as close to the working surface as possible).
2.1. Robot
The robot that was used in our experiment was a FANUC LR Mate 200iD/4S (FANUC CORPORATION, Oshino, Japan). It had a repeatability of ±0.01 mm which we deemed sufficient, as the working area for maximum zoom was 32 by 18 mm
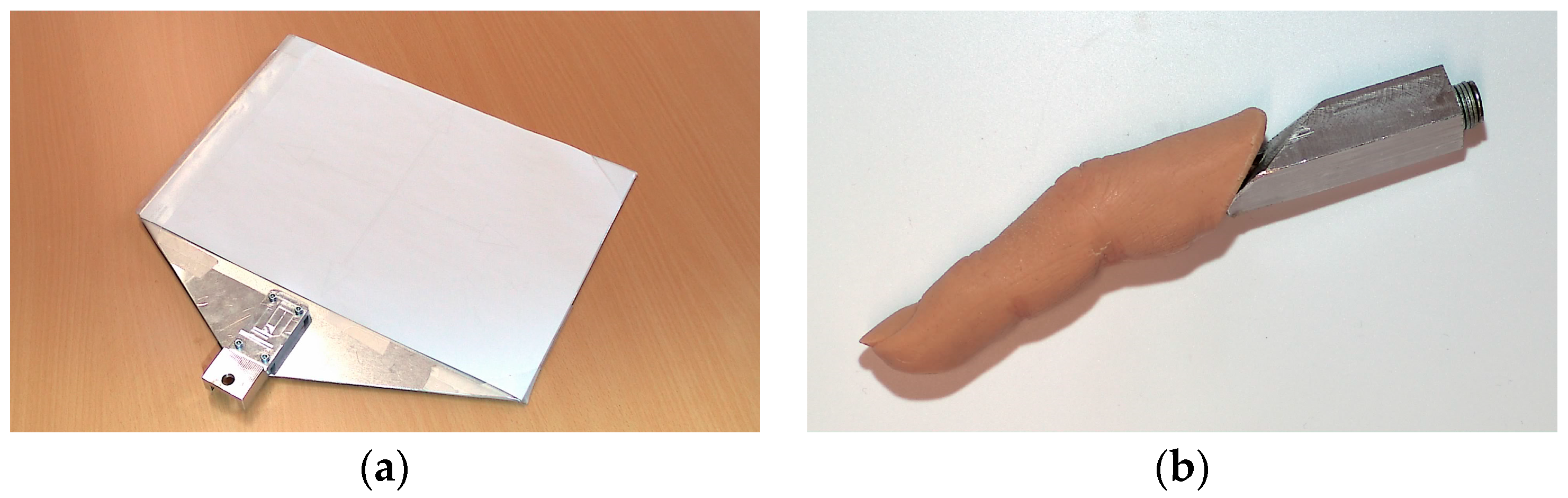
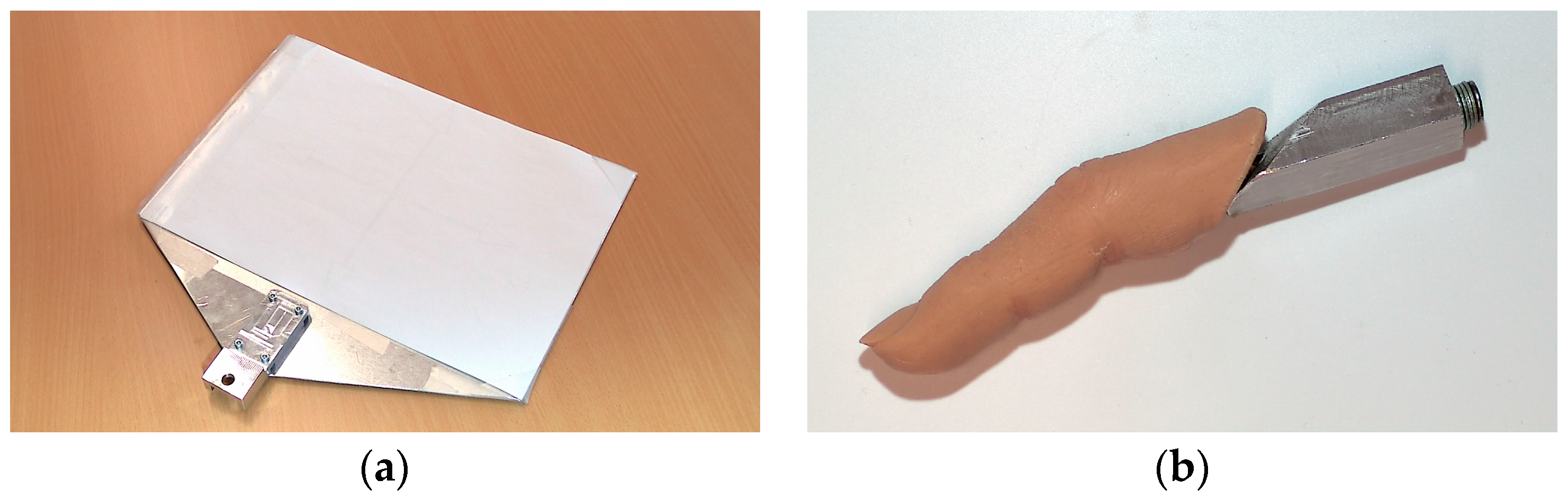
2. It had 6 degrees of freedom and a spherical working envelope of 880 mm at the end effector. Due to the size of the product and the test patterns, we reached the limits of the robot’s range. The robot moved at a programmed speed of 4000 mm/s. The movements were of a linear type and ended at a stop point. The program running on the robot consisted of two parts: the commands to execute the desired movements, and several wait-functions which were used to start the movements at the right time. For most of the tests, we replaced the usual fingers of the gripper with a piece of aluminum sheet which was slightly larger than a standard A4-sized sheet of paper (see
Figure 2a). We also added clear plastic parts to it, which were used to fix the patterns to the plate and enabled us to quickly change to the desired pattern. Another tool was an artificial silicone-finger, seen in
Figure 2b, and a conventional ball pen.
The camera in the system recorded at 60 fps and had a natural resolution of 1920 by 1080 pixels. It had a maximum zoom factor of 14 times. It was mounted inside the head of the product, facing downwards, as seen in
Figure 1 on the left side.
2.2. Scenarios
We gathered data from 7 patterns, 3 zoom levels, and 14 movements, creating 294 different scenarios. They are presented in the order shown below.
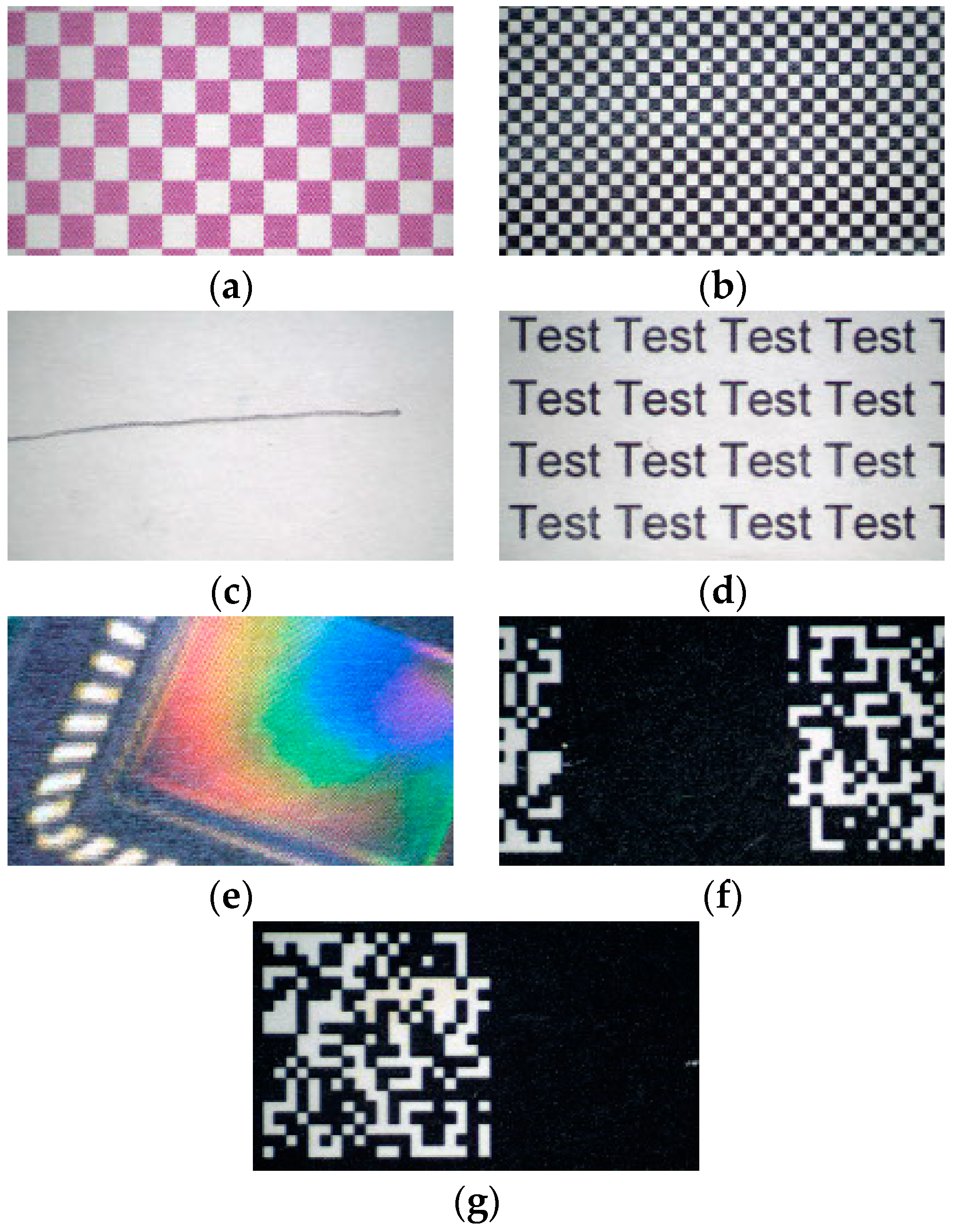
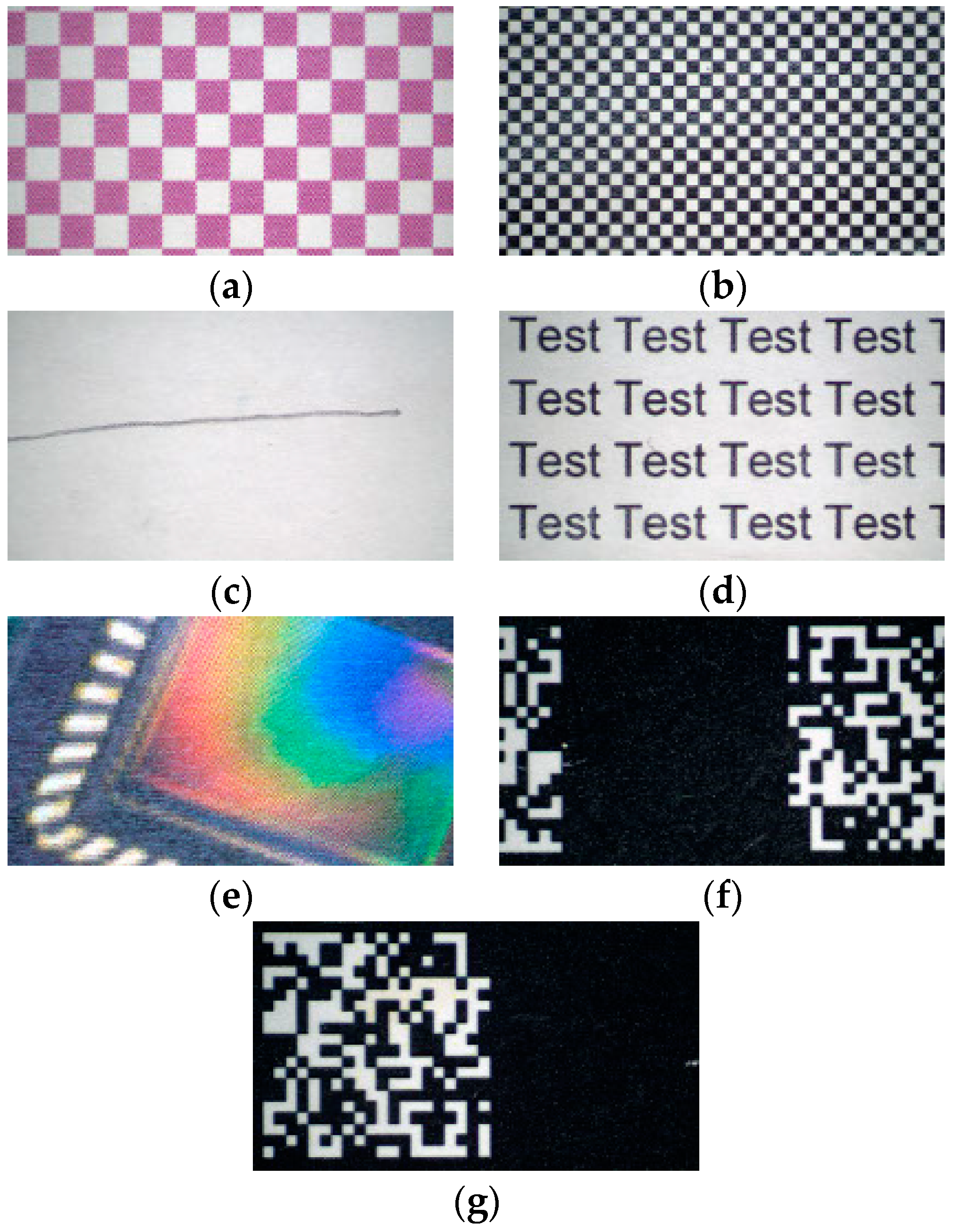
We printed the patterns on A4-sized sheets of paper and attached them to the robot. The patterns were chosen to cover high, low, and medium contrast as well as common situations like drawing on the working surface or showing text and colored images. Followed are short descriptions of the patterns:
Checkered red: this checkered pattern filled almost the entire sheet; the squares were white and red. The size of a single square was 4 mm
2. It had a medium contrast and resolution and was evenly distributed. See
Figure 3a.
Checkered black: the printed area was slightly larger than A5; it was black and white checkered with squares sized 0.64 mm
2. It had a high contrast and small resolution and was evenly distributed. See
Figure 3b.
Pencil line: a single hand-drawn line, about 25 mm long. It had a low contrast and covered the use case of an end-user drawing on the working surface. See
Figure 3c.
Text: the word “Test” was printed all over a sheet (Arial, 8 pts). It covered the use case of showing a printed text. See
Figure 3d.
Graphics: a collection of various colorful pictures. It had high variability in contrast, resolution, and distribution. See
Figure 3e.
Dark pattern: a mostly black piece of paper with 70 matrix codes, each consisting of 40 0.49 mm
2 sized cells. It had a very high contrast, variable resolution, and was unevenly distributed. See
Figure 3f.
Dark pattern rotated: as the pattern was asymmetric, we also tested it in a 180° rotated position. See
Figure 3g.
We conducted the tests at three different zoom-levels:
Maximum zoom (‘tele’): the zoom level where most details could be seen. On the working surface, this was an area of 2.8 by 1.5 mm2.
Minimum zoom (‘wide’): the zoom level where most of the environment could be seen. On the working surface, this was an area of 390 by 220 mm2.
A5: we defined this to be in between ‘tele’ and ‘wide’ as it was a very common setting for the system when an A4-sized sheet of paper was placed in a horizontal orientation. On the working surface, this was an area of 210 by 118 mm2.
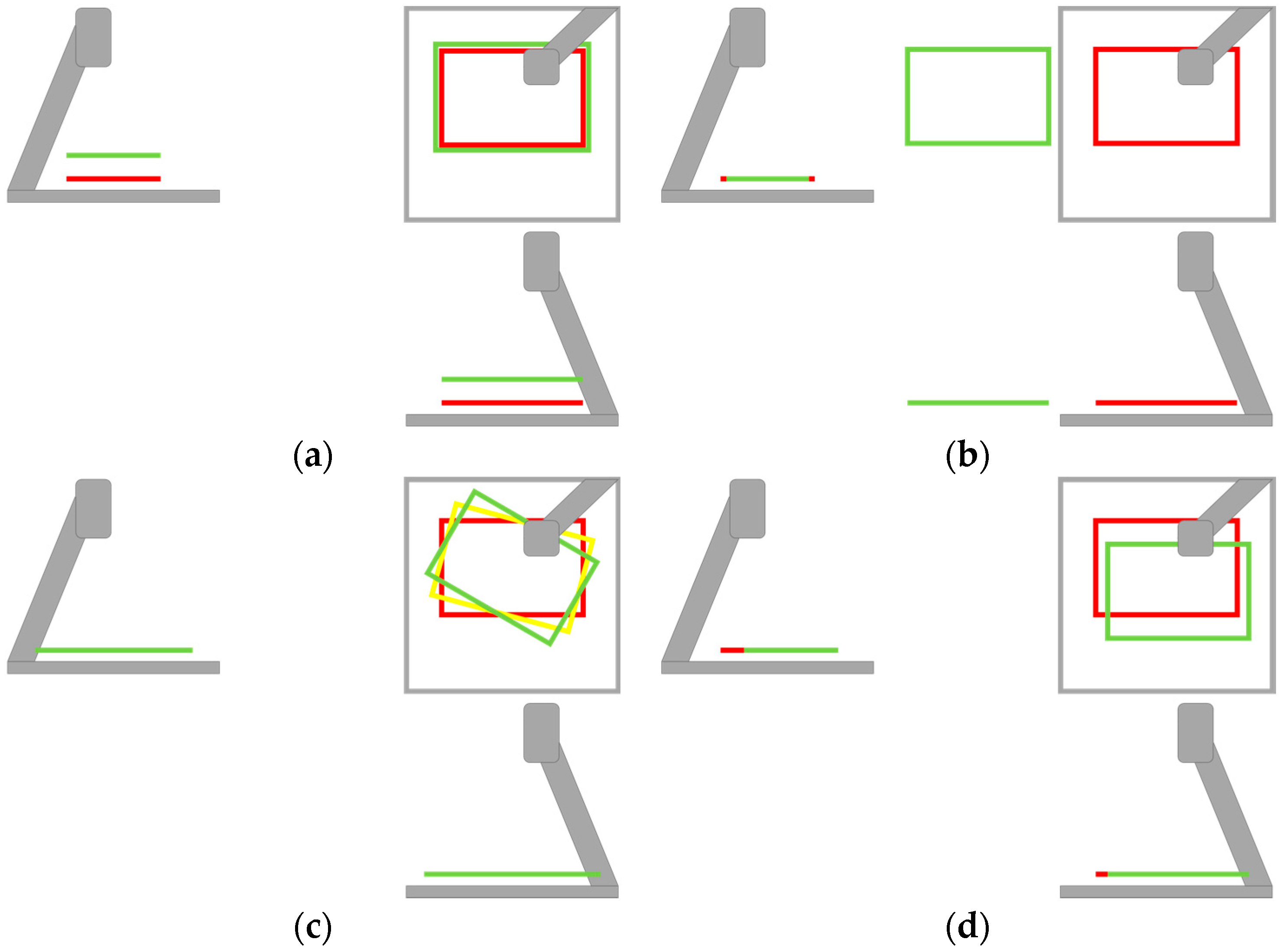
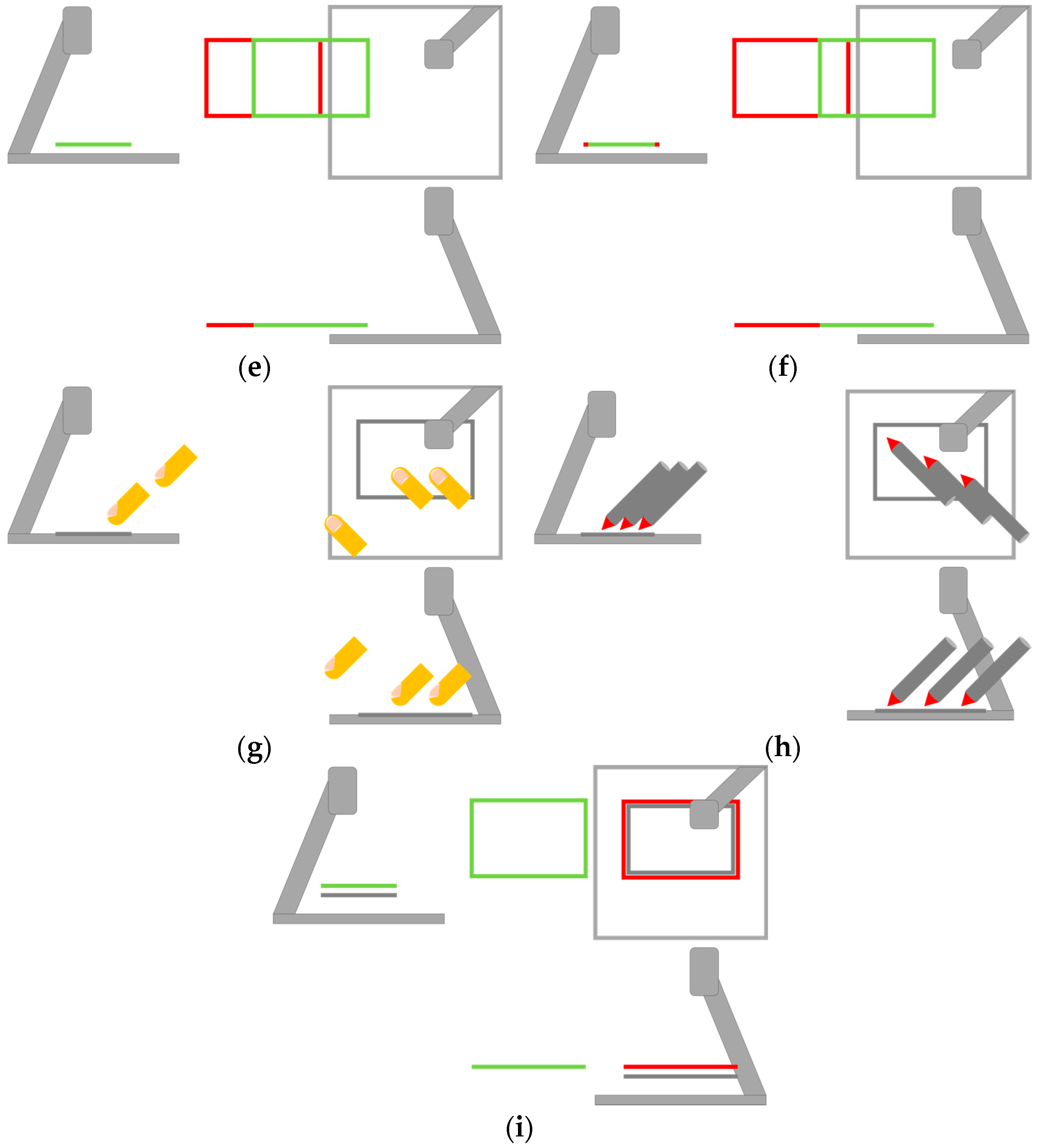
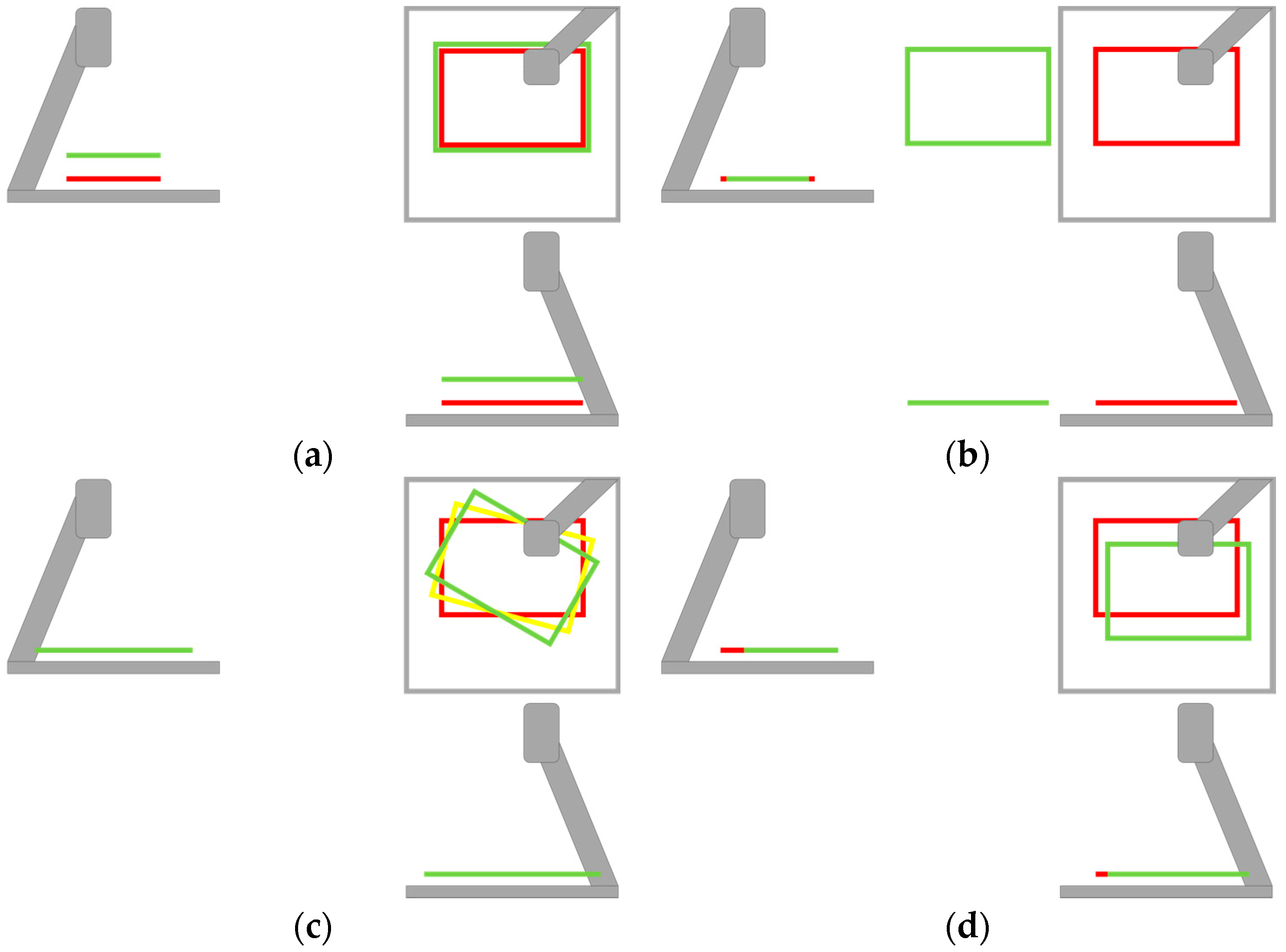
For a better understanding, the movements are depicted schematically in
Figure A1 in
Appendix A. They represented almost all possible movements that might occur during any presentation (for instance, moving the hand or a pointer, changing slides, moving a slide towards the optic, or putting a 3D element on the working surface). A time-lapse recording (
Video S1) shows some of the movements. The movements were divided into three groups:
2.3. Data Acquisition
A complete dataset with 10 loops in each scenario meant 2940 cycles, which took several hours to complete. In the end, we produced a table containing the arithmetic mean, median, maximum, minimum, and standard deviation for total focus time (the time between triggering the algorithm and its end) and final lens position, as well as the amount of timeouts (loops where the autofocus did not trigger at all). Two sets of data were generated between which the parameters of the autofocus algorithm were adapted. Gathering all of the data took a lot of time. For one measurement, the robot spent roughly 8 h waiting for the camera to find the focus or running into a timeout. Including other external factors (for instance, changing the pattern, getting the cell ready, or simply working for other projects), finishing one measurement took almost a week. Between the end of the first measurement and the beginning of the second, six more weeks passed (partially due to the holiday season).
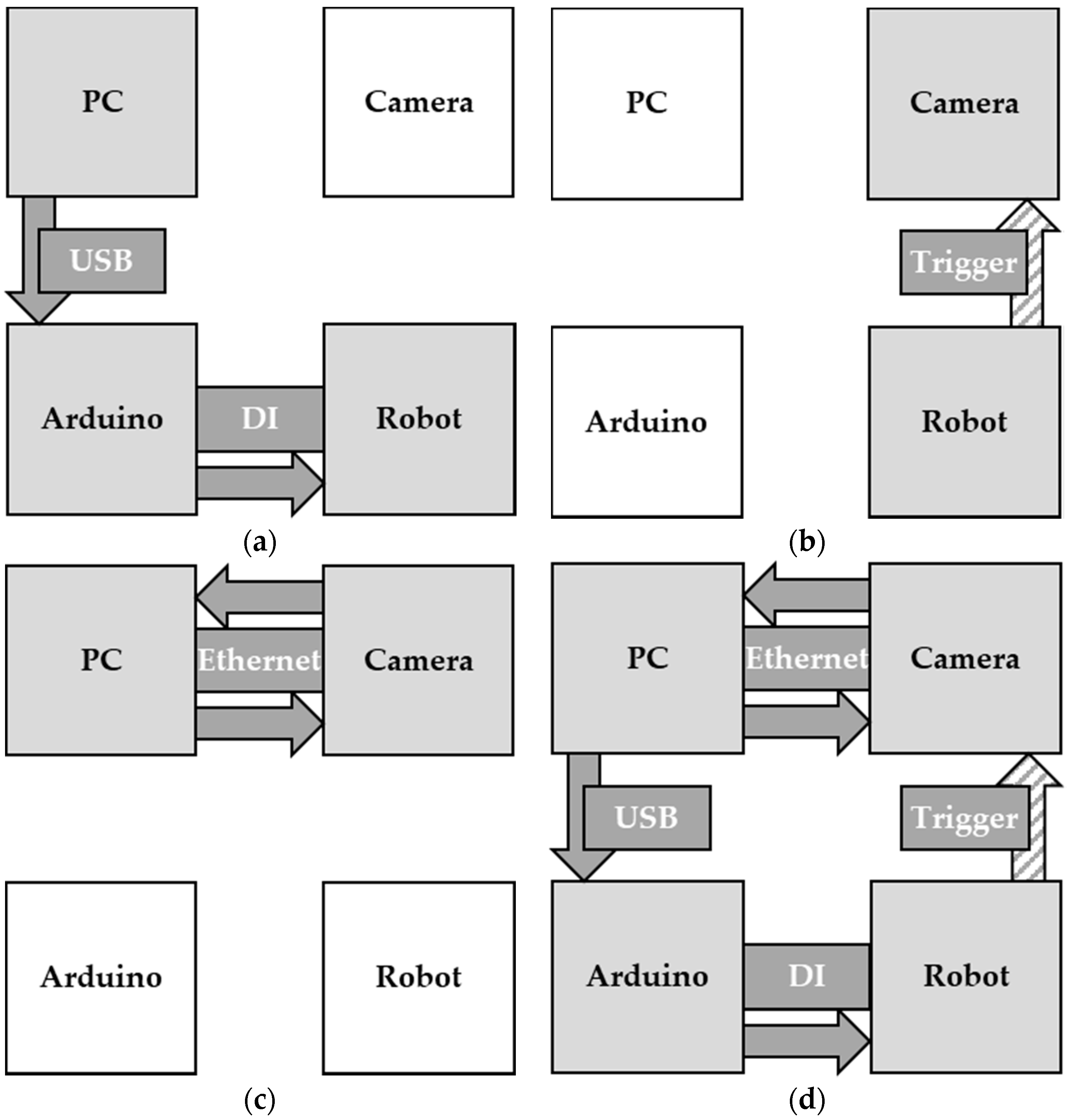
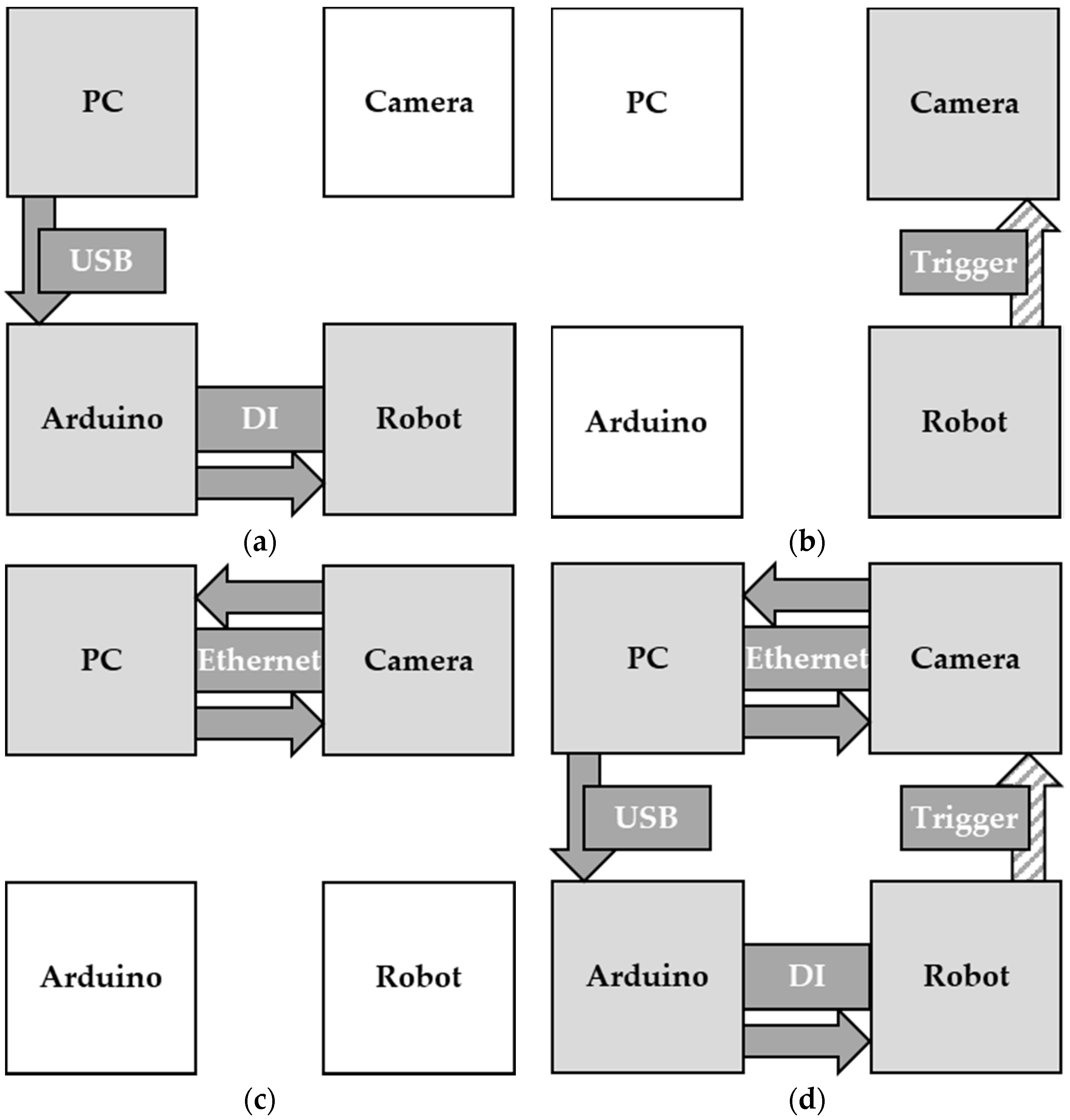
2.4. Communication
The setup had three independent but synchronized machines: camera, robot, and computer. The link between the camera and the PC was established via Ethernet and a respective TCP/IP protocol, which included a function to send the current lens position to the PC (see
Figure 4c,d). The program on the computer compared these values to the previous one and continued requesting new positions until a certain timespan had passed. This was necessary to ensure that the focus had actually settled and would not shift again (see
Figure 4c). The PC and robot were synchronized with an Arduino board: the PC sent the appropriate command whenever a certain state was reached via USB to the microcontroller, where two relay contacts were set accordingly. These were connected to two digital inputs (DI) at the robot controller. The robot program waited for the correct combination of these inputs. Depending on the state of the program, this could mean the confirmation of a found focus-position or the start of the program (see
Figure 4a,d).
2.5. Adaptable Autofocus Parameters
The firmware of the camera had two adjustable groups of variables concerning the autofocus: sharpness and timing. The initial values were obtained by previously conducted manual tests and were therefore, as described in
Section 1, a result of subjective impressions of the testing personnel.
The sharpness parameters, which were adapted in between the measurements, were:
Sharpness minimum value to trigger the autofocus—a higher threshold leads to fewer triggers but could lead to cases where the image is out of focus.
Sharpness variation margins to trigger the autofocus—connected to the first time constraint, this helps to reduce unwanted triggers by moving objects in the field of view.
Sharpness margins between autofocus fields to decide where the object of interest is located—by segmenting the image—for instance a 3 by 3 matrix—and the importance of each field—for instance, a higher weight of the value from the center of the image in the “wide” zoom state.
There were also time constraints which influenced the algorithm gravely. The adapted parameters were:
Averaging time to get rid of spurious peaks and undesired triggers due to hands and pointers or pens in the image
Algorithm processing time limitation to reduce the probability of getting new sharpness values while dealing with the previous ones (e.g., to compensate for motor speed)
Due to the intellectual property of the algorithm itself and it not being the focus of this paper, we will not go into further detail and cannot publish exact values for the respective parameters (see the
Supplementary Materials).
3. Results
Generally, we categorized the possible outcomes into three groups for each scenario: the autofocus triggered on each loop, never, or sometimes. The last cases were the most critical ones, as the algorithm did not perform consistently, meaning that the provided data had to be used to improve the system. If it neither was supposed to trigger nor did so, no changes had to be implemented. If the action of the algorithm was supposed to trigger and always did so, the presented data was going to be used to adjust the algorithm for speed.
After analyzing data from the first measurement, the results from the distinctive scenarios led to our proposed changes. The following adjustments were made to the parameters that were presented in
Section 2.5:
The sharpness minimum value to trigger the autofocus was reduced, as the various daily use cases were defined more clearly which predictably created a better focus result for small objects. This change stemmed from analyzing the average time and timeouts of the motive-moving scenarios over all zoom levels.
The sharpness margins were increased, hoping to avoid excessive refocusing. The data backing this proposal were the average times of the laterally moving scenarios at tele zoom, where the times were surprisingly high.
The margins between the fields were reduced which should help in finding small objects moving from one field to another while at tele zoom without compromising the performance at wide zoom. This was implemented due to the pen-scenarios at tele zoom.
The averaging time was increased in tele and was reduced when going into a wide angle. This should decrease unwanted triggers by moving objects. The performance of the algorithm during the pen and finger scenarios allowed for this adaptation.
The processing time was reduced in all cases, which should improve the algorithm’s precision. This was an update which should improve the results across all scenarios.
After this, a second dataset was generated and compared to the previous results.
Table 1 on the next page shows the critical values for our evaluation. The meaning of the respective values is described below:
The standard deviation of the average time it took the camera to find its focus was calculated for each of the 294 tested scenarios. The standard deviation total was the sum over all of the scenarios and was measured in milliseconds. It depicted the variation of each scenario’s average focus time. A decrease in this sum meant a more consistent behavior overall.
Bad timeout scenarios were scenarios where the autofocus triggered between 1 and 9 times. This meant inconsistent behavior of the camera. An explanatory example: if 7 out of 10 loops were timeouts, we defined it as a bad timeout scenario and this value increased by 1. A decrease in this also meant that consistency had increased. The optimal value would be 0; the worst-case value was 294.
The bad timeouts total was the sum of all runs which were part of an inconsistent 10-loop scenario. Similarly, the decrease of the bad timeouts total meant that the total probability of the occurrence of an inconsistent case decreased. An explanatory example: if 7 out of 10 loops were timeouts, this value increased by 7. The decrease was strongly linked to the previous value. Again, the optimal value would be 0 and the worst-case value would be 2646 (when the autofocus triggered 9 out of 10 times for each of the 294 scenarios).
The average time measured the milliseconds it took the system to find its focus. The average time total was the sum over all of the scenarios and was measured in milliseconds. A lower value meant a faster algorithm.
4. Discussion
The first of the “8 golden rules” of Shneiderman, Plaisant, Cohen, Jacobs, Elmqvist, and Diakopoulos [
2] is to “strive for consistency”. Comparing data from the first and second measurements shows that our system performed more consistently after the adaptations to the algorithm than before. This could be seen in the favorable decrease in the total standard deviation, which means that the average time to find the focus was more consistent (see row 1 in
Table 1). The value for the bad timeout scenarios decreased, which means that the algorithm could better decide whether to trigger or not (see row 2 in
Table 1). The value for the bad timeouts total (see row 3 in
Table 1) decreased even more, which was connected to the previous value, but also meant that if a scenario was not well defined enough, it tended to not trigger at all. This second reason is also seen as favorable, as it aids in preventing a worst-case scenario, which is for the algorithm to trigger when the image is already in focus. In addition, as depicted in row 4 of
Table 1, the adaptions led to slightly faster focus times on average. We are confident that further iterations and possible extensions of the testing will lead to an even more elaborated algorithm.
We believe that relying on objective real-world data is necessary to validate an algorithm like this. Relying on simulated images does not suffice, as they do not show the real use of the camera. If problems should arise in the daily use, we will create additional scenarios and adapt the benchmark for the parameters accordingly.
We are confident that this method is an improvement to the conventional methods of assessing an autofocus algorithm’s ability to work in the desired scenarios, as it shows exactly for which use-cases weaknesses exist, and what the results of a tweaked parameter mean for other cases. The proposed test could be applied to many different cameras and is not limited to the system that was used. Depending on the proposed field of use, the scenarios can be adapted freely.
To increase this even further, a lot of time and trial and error may be necessary, as the various thresholds need to be carefully fine-tuned to maximize the algorithm’s potential. We did not have the time to fully integrate the testing system, which in our case would necessitate the alteration of the firmware that is controlling the camera’s focal lenses. It should be noted that in our case, the time between the beginning of the first and second measurement was 7 weeks.
5. Conclusions
Validating and improving an autofocus algorithm is not an easy task when the images contain a lot of movement, as the input constantly changes and the system might not know how to react. Solutions from recent publications concerning autofocus problems with moving objects were not applicable in our situation, as a repetitive loop was necessary. We built a system which moved objectively and generated repeatable, non-biased data which developers could use to adapt their respective algorithm. The use-cases represented the standard day-to-day usage of the camera and could therefore be used to benchmark the algorithm. Comparing values from measurements before and after adjusting key parameters showed that the system had improved performance after just one loop. The behavior of the system was more consistent than before and therefore, led to higher usability and increased user experience for end-users.
We believe that this test could be run on any other type of autofocus algorithm, as it presented a variety of challenges to contrast and phase detection alike.
The next step is implementing a system that automatically finds the best parameters for the autofocus algorithm. This would drastically reduce the time of one iteration, possibly to a single week.
Supplementary Materials
The Video S1: Time-lapse movements is available online at
https://www.mdpi.com/2218-6581/7/3/33/s1. To access the data generated by this study and further information concerning the materials and methods, please contact Tobias Werner. For information concerning the contrast detection algorithm, its parameters, and the influences of the data on it, please contact Javier Carrasco.
Author Contributions
T.W. and J.C. designed the experiments; T.W. programmed the robot and the interface, as well as performed the experiments; J.C. analyzed the data and adapted the algorithm parameters; T.W. wrote the paper.
Funding
Financial support for this project was provided by the Austrian research funding association (FFG) under the scope of the COMET program within the research project, “Easy to use professional business and system control applications (LiTech)” (contract # 843535).
Acknowledgments
This program is promoted by BMVIT, BMWFJ, and the federal state of Vorarlberg. Special thanks also to Andreas Wohlgenannt who helped us with the selection of patterns and movements, Alexander Brotzge for helping with the Ethernet-protocol, and to Walter Ritter who helped with synchronizing the PC and the robot.
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study, in the collection, analyses, or interpretation of data, or in the writing of the manuscript and the decision to publish the results.
Appendix A
Figure A1.
The used movements in side, top, and front view: (
a) up/down; (
b) in/out; (
c) rotation; (
d) move; (
e) 33% in; (
f) 66% in; (
g) finger; (
h) pen; (
i) layer; the red position in (
a–
d) is also seen in
Figure 1.
Figure A1.
The used movements in side, top, and front view: (
a) up/down; (
b) in/out; (
c) rotation; (
d) move; (
e) 33% in; (
f) 66% in; (
g) finger; (
h) pen; (
i) layer; the red position in (
a–
d) is also seen in
Figure 1.
References
- Nakahara, N. Passive Autofocus System for a Camera. U.S. Patent 7,058,294, 6 June 2006. [Google Scholar]
- Shneiderman, B.; Plaisant, C.; Cohen, M.S.; Jacobs, S.; Elmqvist, N.; Diakopoulos, N. Designing the User Interface: Strategies for Effective Human-Computer Interaction; Pearson: New York, NY, USA, 2016. [Google Scholar]
- Mir, H.; Xu, P.; Chen, R.; Beek, P. An Autofocus Heuristic for Digital Cameras Based on Supervised Machine Learning. J. Heurist. 2015, 21, 599–616. [Google Scholar] [CrossRef]
- Chen, R.; van Beek, P. Improving the accuracy and low-light performance of contrast-based autofocus using supervised machine learning. Pattern Recognit. Lett. 2015, 56, 30–37. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.; Zhang, X.; Li, S.; Liu, X.; Wang, X.; Tang, J. A comparison of contrast measurements in passive autofocus systems for low contrast images. Multimed. Tools Appl. 2014, 69, 139–156. [Google Scholar] [CrossRef]
- Bi, Z.; Pomalaza-Ráez, C.; Hershberger, D.; Dawson, J.; Lehman, A.; Yurek, J.; Ball, J. Automation of Electrical Cable Harnesses Testing. Robotics 2018, 7. [Google Scholar] [CrossRef]
- Shilston, R.T. Blur Perception: An Evaluation of Focus Measures. Ph.D. Thesis, University College London, London, UK, 2012. [Google Scholar]
- Dembélé, S.; Lehmann, O.; Medjaher, K.; Marturi, N.; Piat, N. Combining gradient ascent search and support vector machines for effective autofocus of a field emission–scanning electron microscope. J. Microsc. 2016, 264, 79–87. [Google Scholar] [CrossRef] [PubMed]
- Marturi, N.; Tamadazte, B.; Dembélé, S.; Piat, N. Visual Servoing-Based Depth-Estimation Technique for Manipulation Inside SEM. IEEE Trans. Instrum. Meas. 2016, 65, 1847–1855. [Google Scholar] [CrossRef]
- Cui, L.; Marchand, E.; Haliyo, S.; Régnier, S. Three-dimensional visual tracking and pose estimation in Scanning Electron Microscopes. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5210–5215. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}