1. Introduction
Cable driven robots, or simply cable robots, are relatively simple parallel manipulators, operating in planar or spatial arrangements, formed by attaching multiple cables to a moving platform, on which the end-effector is fitted. In cable robots, the cables are driven by motors which can extend or retract the cables by winding or unwinding them from pulleys (also called winches or drums). In this sense cables are usually said to be active. Cable robots have several desirable advantages compared to conventional serial and parallel robots. For this reason they have been studied thoroughly since the early 90’s [
1] and promise to significantly increase performances of today’s industrial robots in terms of payload, workspace and dynamic performances: they can be designed to have a very large workspace, a very high load capacity, or to generate very high speed motions [
2], always with considerable energy efficiency. Their unique features, arising from parallel kinematics combined to minimal moving masses, make them amongst the most promising robotic devices in the industrial and service field, as it is proved by the ever-growing number of cable robot families that has been developed by research institutions and private companies [
3,
4].
Very often, cable robots are designed to be redundant (i.e., with more active cables and hence motors, than degrees of freedom (dofs) of the moving platform, see for example, Reference [
2]), however, fully actuated (i.e., with a number of active cables equal to the dofs, see for example, Reference [
5]) and underactuated (i.e., with less active cables than dofs, see for example, Reference [
6]) topologies have been studied too. Moreover, cable robots can exhibit a hybrid design (i.e., with both cables and rigid link mechanisms [
3,
7]). Redundant cable robots are the sole robots which can completely restrain the moving platform of a cable robot: in order to fully constrain the moving platform of a cable robot, it is required that the number of cables is greater by one than the number of dofs of the moving platform (see for example, [
8]), hence a redundant configuration is needed. The condition on the number of cables is only necessary but not sufficient: a cable robot can be underconstrained, even if the number of cables is greater than the number of dofs. It is typically the case of the so-called cable suspended robots. Generally speaking, a high number of cables may lead to overconstrained configurations (see for example, Reference [
2]), while a lower number of cables leads necessarily to underconstrained robots, which must rely on gravity to keep positive tensions in the cables (see for example, References [
9,
10]). Indeed, contrary to fully constrained or overconstrained cable robots, the underconstrained ones cannot take advantage of redundant cables to set a desired tension distribution in the cables. This makes operating underactuated cable robots particularly challenging.
A major requirement that has to be met in cable robots is ensuring that during operation all the cables are under adequate tension (at least cable slackness must be prevented in all the cables) and that such a tension is below the maximum permissible value related to the torque limits of the winch motors or to the tensile force limits of the cables [
5]. In practice, this makes it necessary to take into account explicitly the bilateral bounds on cable tensions reflecting both the unilateral nature of cables as actuators (cables can pull but are unable to push the end-effector) and the additional constraints posed, on the upper bound, by cable and motor physical properties and, on the lower bound, by safety margins or end-effector stiffness requirements [
11,
12]. The latter requirements usually suggest imposing a lower bound for cables forces greater than 0. Clearly, the evaluation of the performances of a cable robot cannot neglect such peculiarities of cable robots and the complexity arising from the need of keeping bounded cable tensions. As a result, though cable driven robots are basically parallel robots, the traditional performance indices developed for parallel robots (see for example, [
13,
14,
15,
16]) are inadequate and cannot be employed straightforwardly.
So far, just a few examples of performance indices for cable robots have been proposed in literature. They have mainly been conceived as extensions to cable robots of traditional Jacobian-based performance indices. In [
17] an evolution of the Yoshikawa manipulability has been proposed. In [
18] the condition number has instead been applied as is, by restricting the analysis to a specific workspace. In [
19] the Kinematic Sensitivity Index [
20] has been modified in order to achieve the best workspace region of cable robots. An evolution of the isotropy index, called tension factor, has been proposed in [
21]: the tension factor is an isotropy index, defined in the joint space, which evaluates the ratio between minimum and maximum cable tensions. Another interesting isotropy index has been defined in [
9] for evaluating the inertial properties of two cable robots designed for rehabilitation. In the same work, a maximum isotropic force has been defined in order to find the minimum force that can be exerted in any direction. The index in [
8] has been then extended for application to reconfigurable cable robots [
22,
23].
In [
24] a novel approach to cable robot performance evaluation has been proposed and applied to solely redundant cable robots. The approach is based on the computation of the maximum force which can be exerted by the active cables on the moving platform along a specific direction. By extending the reasoning behind such an approach, in [
25] a novel performance index called Wrench Exertion Capability (
) has been firstly introduced. The reason for referring the evaluation to a given direction comes from a typical practical need when designing a cable robot: predicting the maximum force or torque that can be exerted on the moving platform along a direction of interest, usually keeping either null or limited wrench components, both in terms of forces and torques, along the other directions. This is basically what is meant by evaluation of the
of a cable robot along a direction. In [
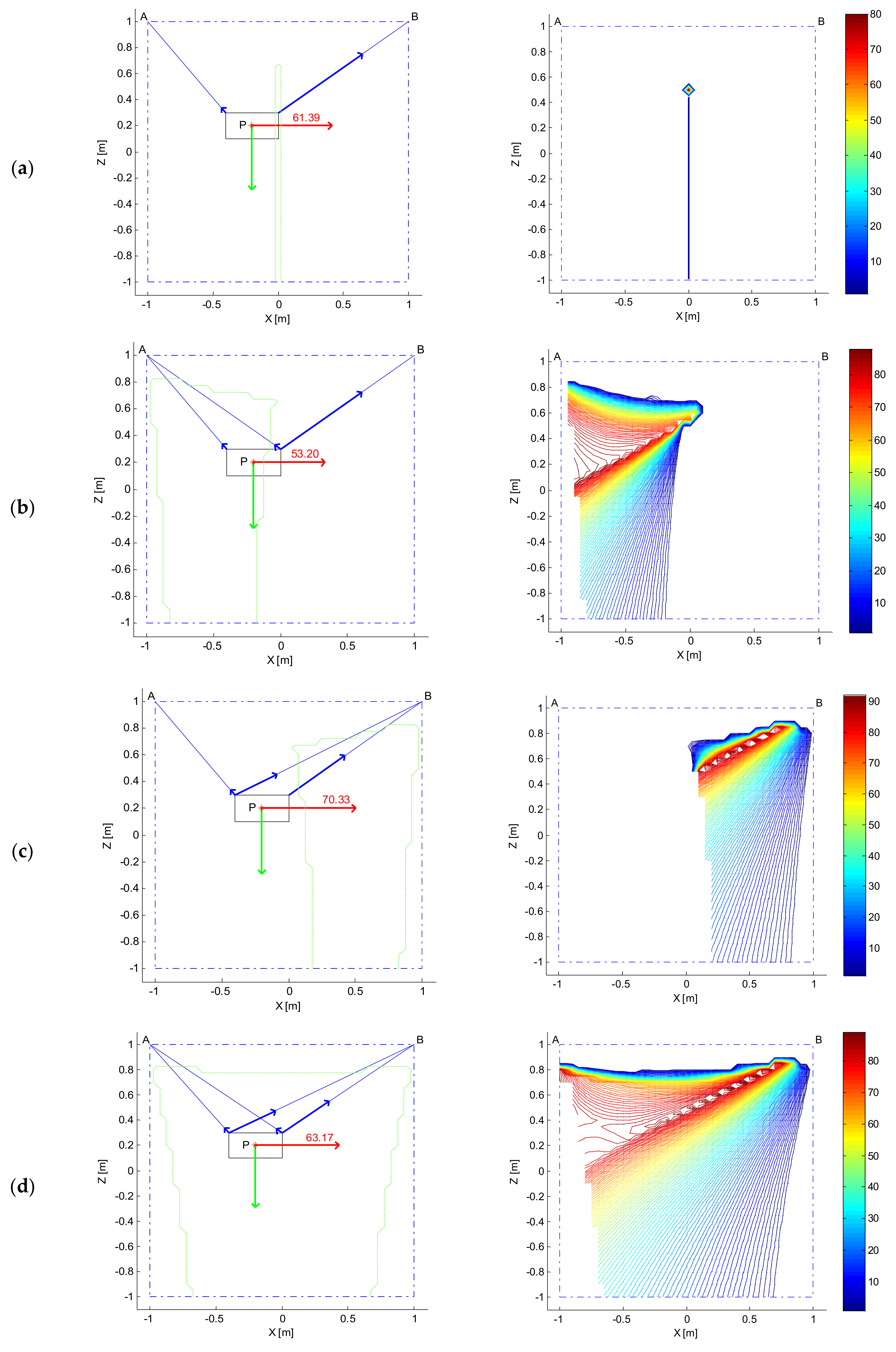
25] a preliminary formulation of the method has been introduced, as well as a validation restricted to planar cable robots. This paper improves such a formulation and extends it to spatial cable robots therefore setting an ultimate formulation of the method.
The
appears more versatile than other performance indices since it can be used to perform various analyses. Not only can the
be employed for maximum force/torque evaluations but also to compute the minimum force/torque values which can be guaranteed throughout the workspace, irrespective of the direction and for isotropy evaluations. All these analyses allow getting considerable insight into cable robot performances and give the possibility to perform comprehensive comparisons among the performances of cable robots with different topologies and alternative cable layouts: indeed, such comparative investigations often need to be carried out since it is apparent that not only are the performances of cable robots influenced by the number of active cables but also by their geometrical arrangement. A challenging example of
employment is given by some recent recovery strategies in case of cable failure [
26,
27].
The paper is organized as follows. The
formulation is first developed in
Section 2: the formulation is based on the theory developed in [
25] which is here revised and extended to generic spatial robots. In
Section 3 three illustrative examples of computation of the
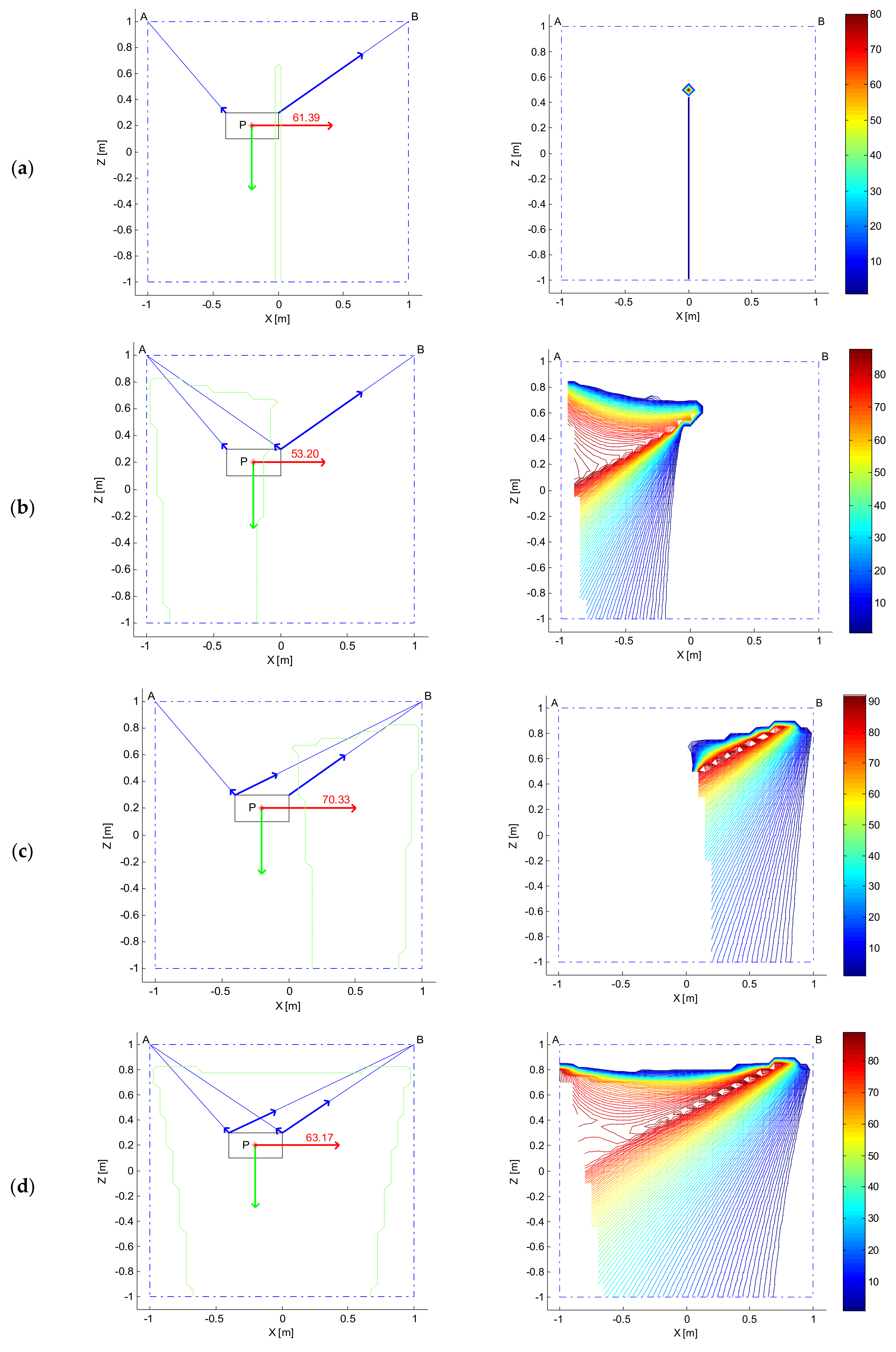
are provided. Firstly, the
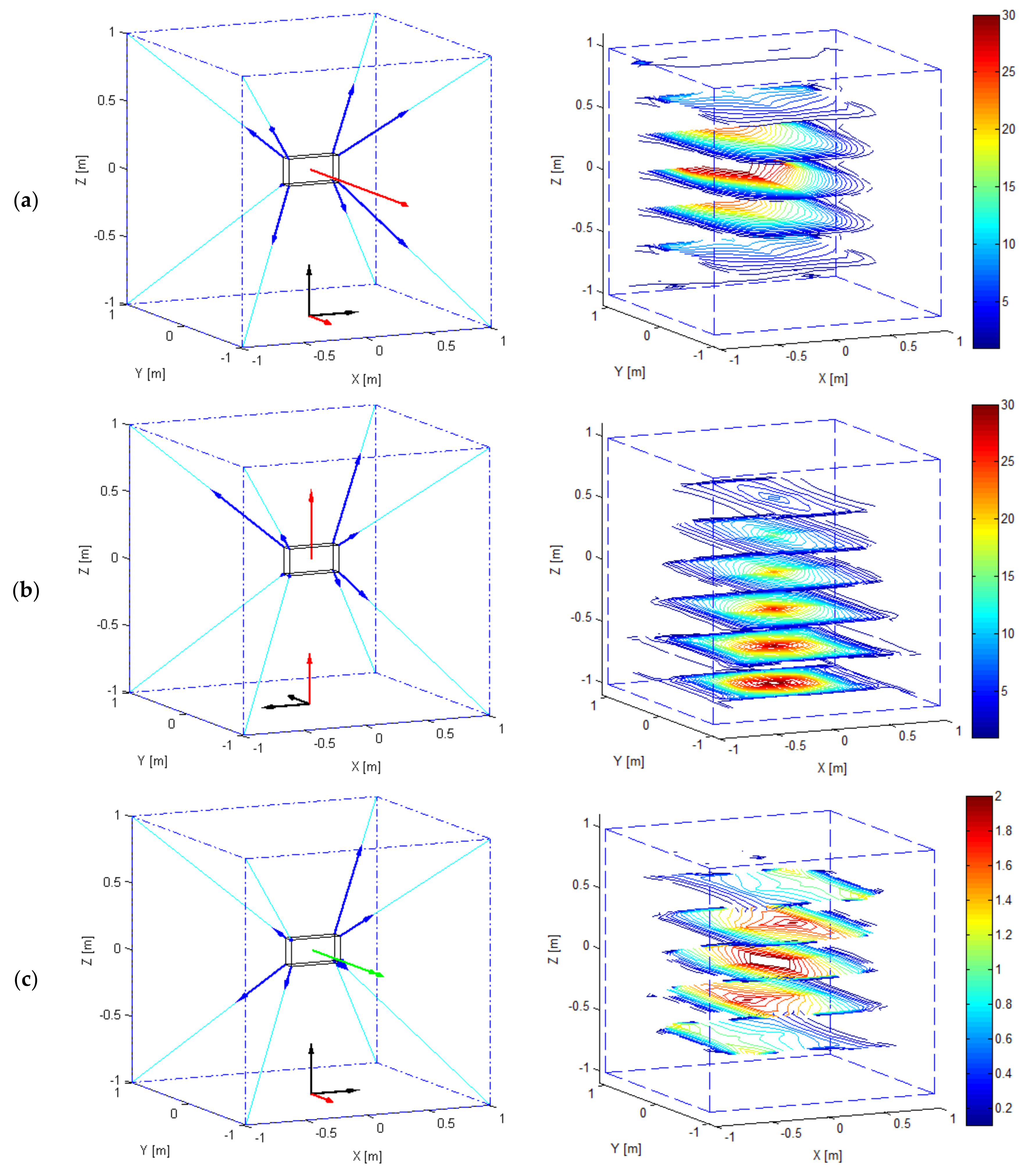
is employed to compare the performances of two fully actuated planar cable robots with different cable layouts. A comparison is also made with state-of-the-art performance indices. Secondly, performance changes due to variations in the number of cables are investigated by referring to a planar and cable suspended robot. Thirdly, an investigation is proposed to show the benefits related to the use of the
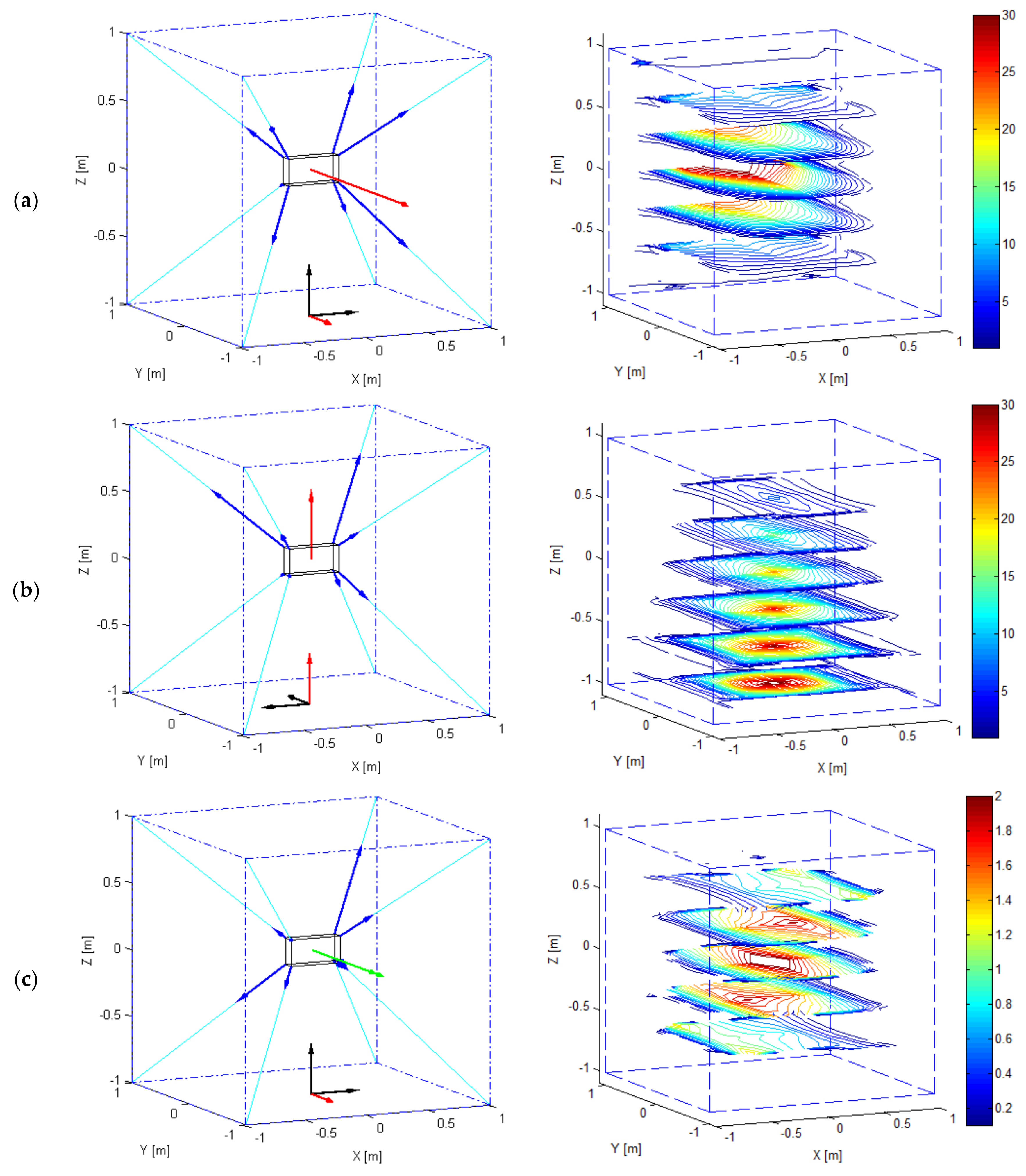
in the evaluation of the performances of a spatial cable robot. The conclusions are stated in
Section 4.
2. Wrench Exertion Capability
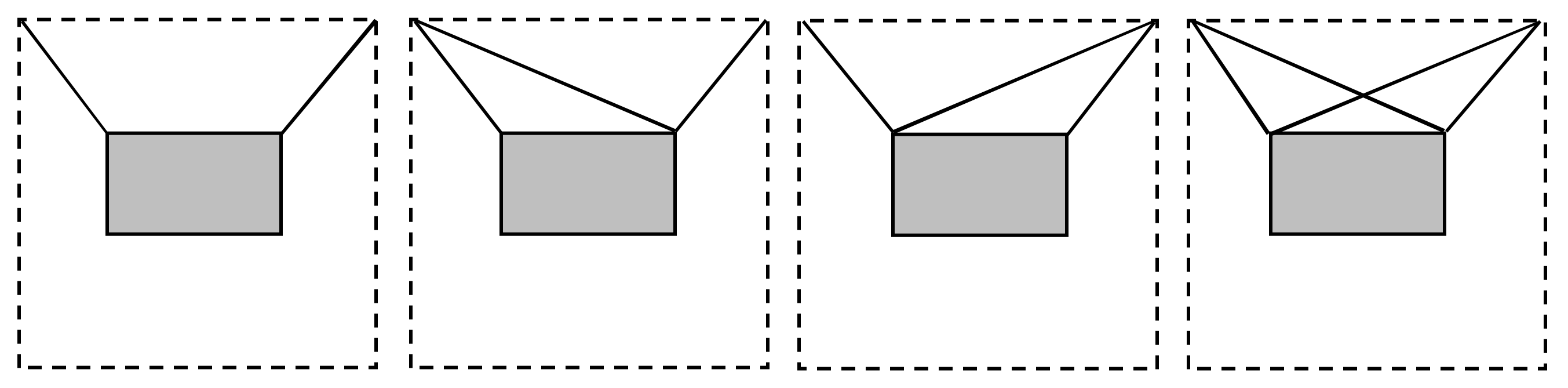
Suppose that for a given pose of the moving platform of a cable robot you were interested in evaluating the maximum force or torque that cables can exert on the platform, along a certain direction. Such an interest could be motivated by a variety of reasons, including, for example, the need to identify the regions of the workspace where the robot best performs in terms of initial acceleration, payload capacity or capability to react to external disturbances (forces or torques). Clearly, the maximum force or torque that the cables can exert on the moving platform, along a given direction, depends on the maximum force that each cable can exert. Less obviously, such a wrench exertion capability also depends on the minimum tension of the cables that must be guaranteed to avoid cable slackness or to meet a desired stiffness requirement for the robot platform. At least, cable tension must be greater than zero to guarantee that cable forces can be maintained tensile. Computing the index for a cable robot basically consists in performing the aforementioned evaluation taking into account cable tension limits explicitly.
The computation of the
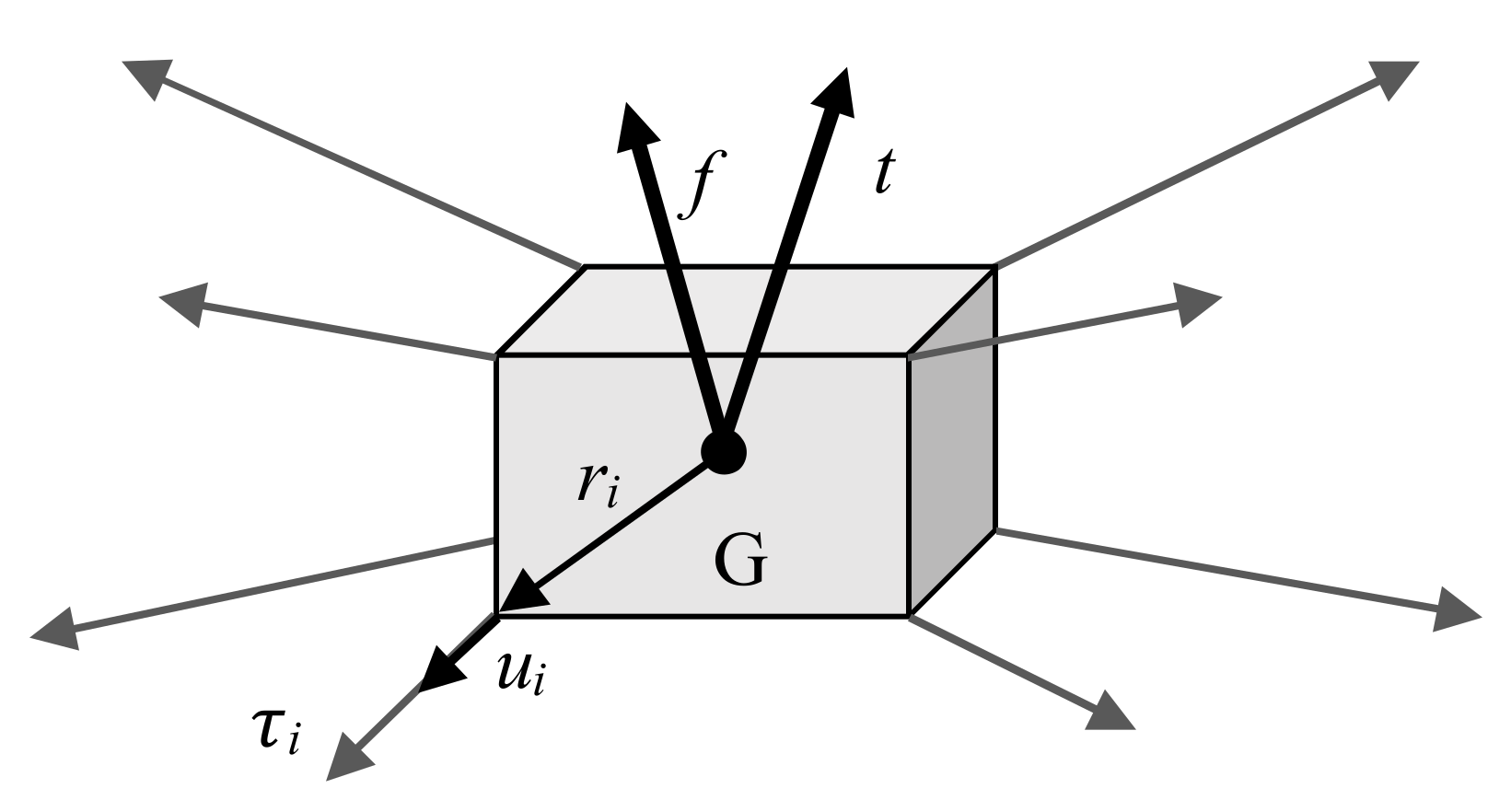
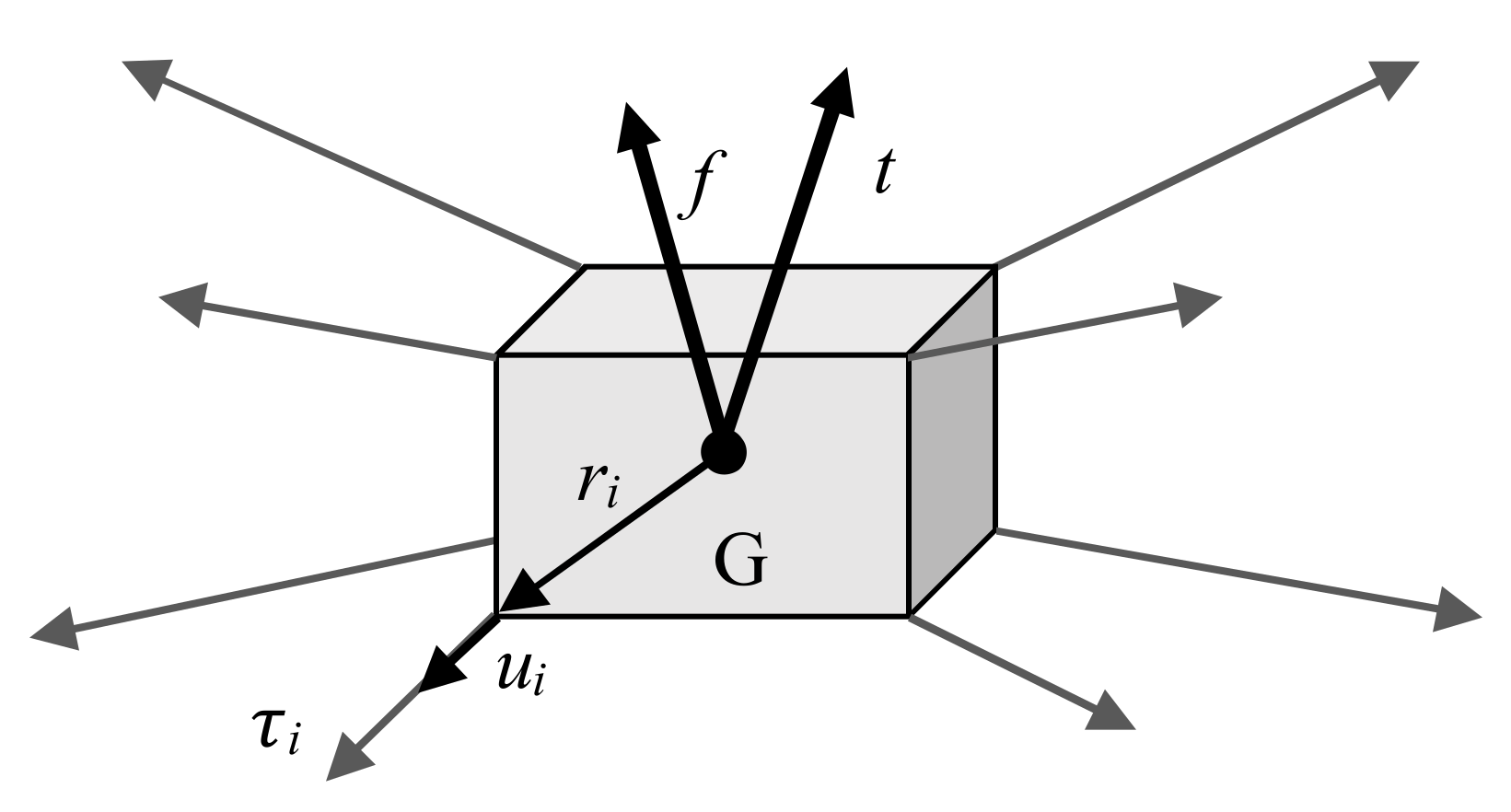
suggested in this work is based on the solution of a linear programming problem involving cable tensions, cable tension limits and a novel representation of the so-called wrench matrix. The wrench matrix
of a cable robot, also called structure matrix, is usually defined as the matrix relating the wrench
exerted by the cable forces on the moving platform to the tension vector
containing the cable forces
(see
Figure 1). It can be immediately recognized that in the most general case of a spatial cable robot driven by
cables, it holds:
, where the structure matrix
takes the following form:
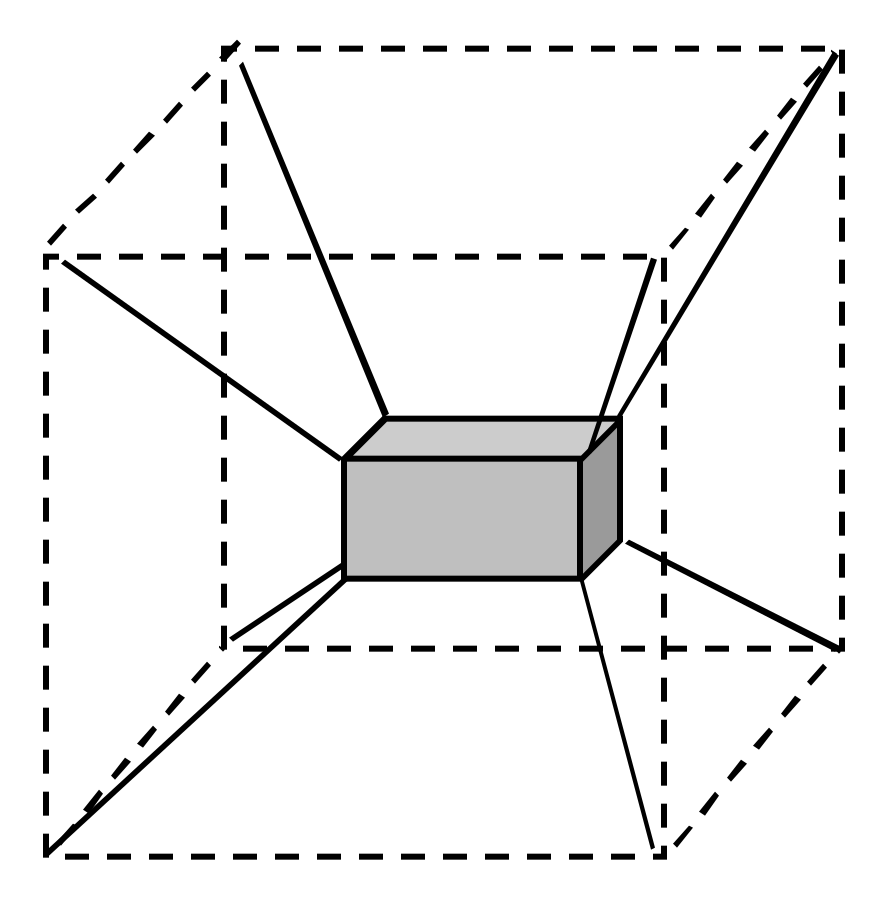
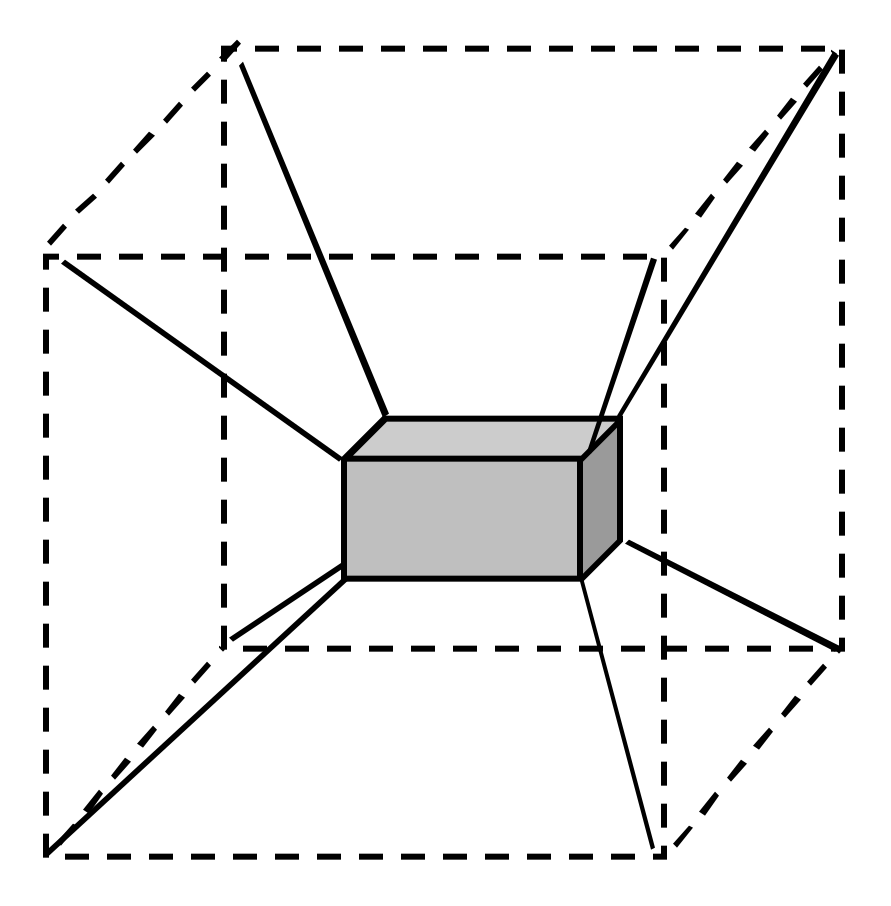
As schematically shown in
Figure 1, vectors
and
are respectively the unit vector running along the
ith cable, (oriented from the moving platform, that is, the box painted in grey in the scheme, towards the
ith cable output point on the fixed frame) and the vector from the centre of mass (G) of the moving platform to the point where the
ith cable is connected to the moving platform.
The structure matrix
only allows computing the cable wrench
exerted by the cables on the moving platform. In general, this is not the sole wrench applied to the moving platform. In order to compute the total wrench
applied to the moving platform, external loading, including, for example, gravity force, should be taken into account. In the previous definition of
vectors
and
are respectively the overall forces and torques exerted on the moving platform by the cables and the external forces. To account explicitly for external forces, a novel definition for the wrench matrix (denoted by
) is introduced, which is obtained by simply aggregating the structure matrix
and the external wrench
:
Once the matrix definition of
in Equation (2) is introduced, it is possible to develop cable robot performance analysis following a well-established approach. It is common knowledge that in the performance analysis of parallel manipulators it has been proved convenient to split Jacobian matrices into their “translational” and “rotational” parts [
13] in order to evaluate independently the translational and rotational capabilities of parallel robots. By applying the same idea to the novel definition of the wrench matrix of a cable robot, it is here suggested to split
into two parts, namely
and
(where
) to analyze separately force and torque exertion capabilities.
The proposed analysis is particularly useful when it is referred to a specific direction of interest not necessarily coinciding with an axis of the absolute reference frame. Since the force and torque components in vector
are expressed in an absolute reference frame, in order to refer the evaluation to a specific direction
, a rotation matrix
can be introduced to define such a direction of interest univocally in the absolute reference frame adopted [
13]. Once the direction
is defined, symbols
and
are used to denote two orthogonal directions which, combined with
, provide a Cartesian reference frame. The following expressions can be adopted to rotate matrices
and
:
Then, for example, the
WEC of a fully constrained cable robot can be expressed in terms of the maximum force
that can be exerted along the direction d while keeping bounded cable tensions and given values
of the other wrench components. Such a
WEC may be referred to as
, since it involves a force evaluation along a direction of interest
and can be computed by solving the following linear programming problem (henceforth, the symbol
stands for the component-wise inequality):
Similarly, if the torque exertion capability along a direction d is to be evaluated, the
can be computed by simply solving the linear programming problem stated as follows:
In general, a default value for should be because, when a cable robot is designed, a practical need may consist in predicting the maximum force that can be exerted along a prescribed direction while keeping null wrench components, both in terms of forces and torques, along the other directions. For example, this is the case when it is necessary to accelerate the moving platform along a specific direction belonging to a path, while keeping the platform orientation unaltered. This is coherent with the typical investigation objectives presented at the beginning of this section.
The possibility of meeting imposed requirements on the full set of values
of the wrench components excluding the one which is maximized, may only be assured in fully actuated and redundant cable robots. Conversely, when a cable robot is underactuated this is generally impossible. Nonetheless, a suitable redefinition of the linear programming problem allows extending the application of the
WEC index to such cable robots. Indeed, in underactuated cable robots it is impossible to apply the proposed optimization unless enough equations in the linear problem
are removed. This is a consequence of the fact that it is impossible to assign finite values to all the
components but only to
of them, where
is the number of active cables. Instead of just removing from the linear programming problem the proper number of equality constraints, we suggest replacing them with inequality constraints imposing upper and lower bounds to the wrench components to which finite values cannot be assigned. As an example, consider the problem statement in Equation (6) which refers to a spatial cable robot with 6 dofs driven by 3 active cables: in order to compute a
, finite values are assigned only to 2 force components (
) while the torque components of the overall wrench are limited by upper and lower bounds (
).
In particular, if we compare Equation (6) with the formulation in Equation (4), it is apparent that the constraints in the form of equalities removed from have been replaced by a suitable set of constraints in the form of inequalities .
The presented extension of the WEC definition to underactuated cable robots addresses a more general problem and gives the opportunity to make comparisons among considerably different robot topologies keeping a goal-driven approach.
Equation (7) provides a conclusive and general formulation of the
, suitable to any cable robot topology, where
is a generalized force (i.e.,
can be either a force or torque component of the wrench vector
projected along the direction
of interest).
It is worth highlighting that in Equation (7) the dimensions of the matrices and are related to the cable robot topology and to the specific constraints defined for the analysis, reflecting operational requirements or specific features of the application. Let be the number of rows of matrix (i.e., the number of linear equality constraints). The following inequality must always hold: , where is the number of degrees of freedom of the moving platform and is the number of active cables. The inequality holding for reflects the practical need that the maximum number of equality constraints cannot exceed (being 1 the force or torque to be maximized and the overall number of wrench components) or in the case of underactuated robots. The maximum number of rows of matrix is instead equal to : since one inequality constraint can be introduced only if it is impossible, or not necessary for the given application, to provide constraints in equality form (i.e., if , then can be greater than zero). As for the number of columns of and , they are both equal to , that is, the size of the column vector .
In conclusion, the definition is strictly related to the constraints defined for the linear programming problem. Such constraints depend on the topology and on the application. It is important to notice that the formulation with inequality constraints can be always adopted, while exact values to all the wrench components apart from the one maximized (i.e., a formulation with a full set of equality constraints) can be imposed only with fully actuated or redundant robot.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}