1. Introduction
In recent years, automatic driving control has attracted attention, and various studies on this topic have been undertaken [
1,
2]. In automatic driving systems that achieve lane-keeping and obstacle avoidance, the traveling route is predicted based on the data of the driving environment collected using sensor information from cameras and other equipment mounted on the vehicle [
3,
4]. Acceleration and braking are then controlled to move the vehicle along the predicted traveling route. Accordingly, the predicting of the traveling route is crucial for achieving sophisticated automatic driving control. Although it may be possible to obtain an accurate traveling route if it can be predicted using a vast amount of data and a sophisticated prediction algorithm, it is very likely that, if the amount of data available is small and the prediction algorithm is simple, the accuracy of the predicted traveling route will be inferior.
Based on this perspective, many previous studies have been conducted on image recognition as a means of recognizing the driving environment with high prediction accuracy [
5,
6,
7]. Moreover, many studies have been conducted on various prediction methods, such as Kalman filtering and machine learning, and automatic driving control systems based on such methods have been proposed [
8,
9,
10,
11,
12,
13]. However, the prediction method, regardless of its accuracy, may produce prediction errors that are unavoidable in an unpredictable real-world situation. Accordingly, methods to minimize the degradation incurred in the performance of automatic driving control when a prediction error occurs are deemed necessary.
In the field of control, an optimal prediction governor, whereby the predicted signal is shaped to minimize the decrease in the control performance of the system when a prediction error occurs, has been proposed [
14]. In an optimal prediction governor, the low accuracy predicted value obtained in real time, is proactively shaped using a past high accuracy predicted value and the system model information. In an autonomous driving system, in addition to the predicted value obtained in real time, in many cases it is also possible to use highly accurate predicted information obtained from time-consuming processing, such as image recognition, and therefore, the applicability of the prediction governor to automatic driving problems is considered to be high. However, only linear systems are considered in the optimal prediction governor, making it inapplicable directly to nonlinear systems such as automotive systems.
Motivated by the above, this paper is focused on the design of an optimal prediction governor for nonlinear systems. First, a generalized version of the prediction governor designed in our previous study is considered. Then, the optimal design problem for the prediction governor is formulated for application to input-affine nonlinear systems. The optimality here refers to the shaping of the low accuracy predicted value by the prediction governor, such that the system output obtained using this shaped value becomes the best approximation of the system output obtained using the high accuracy predicted value as input. Next, the optimal design problem is analytically solved to derive the optimal prediction governor and clarify the optimal structure. Finally, the application of the proposed prediction governor to an automatic driving control problem is described. In particular, the usefulness of the prediction governor is validated through the result of a trajectory tracking simulation and an experiment on lane-keeping control using a radio controlled car.
The following points are emphasized. First, in this study, the prediction governor proposed in our previous study [
14] was generalized, and an optimal prediction governor for input-affine nonlinear systems was derived. Consequently, the prediction governor was rendered applicable to not only linear, but also nonlinear systems. This is a significant and successful outcome in terms of developing optimal design theory for prediction governors. Next, the prediction governor was applied to an automatic driving control system, and the usefulness of the proposed method was validated through numerical simulations and experiments. Based on this initiative, it is likely that the practical applicability of the prediction governor can be demonstrated. Moreover, to be best of the authors’ knowledge an approach that considers the reshaping of predicted signals in automatic driving control has not previously been reported. Accordingly, the successful outcome of the present study gives new insight into automatic driving technology.
Finally, we make the following remark. The approach of this paper is similar to a path smoothing approach based on model information of systems for non-holonomic vehicles [
15]. However, the proposed perdition governor shapes predicted signal with prediction error in order to minimize the performance degradation due to prediction error. This point is different from the previous work in [
15]. In addition, the prediction governor is similar to reference governor [
16,
17]. However, the prediction governor is distinguished from the reference governor in terms of concept and structure. The main purpose of the prediction governor is to minimize the influence of the prediction error on the system’s output, while that of the reference governor is to eliminate wind up phenomenon due to the input/state constraints of systems. Moreover, the basic reference governor is given by
, where
is a given original reference signal,
v is a modified reference signal, and the parameter
is maximized by considering input/state constraints. Thus, the reference governor is based on the original desired reference signal
and the model information, and minimizes the value of
under input/state constraints. In contrast, the prediction governor is based on the predicted low accuracy signal
, the past high accuracy signal
, and the model information. In addition, it minimizes the output difference between the system driven by the shaped signal
v and that driven by
.
This paper presents an extension of the authors’ previous study [
18], with the addition of a proof of the optimality for the derived prediction governor and the results of an experiment using a radio controlled car.
Notations: Let , , and be the real number field, the set of positive real numbers, and the set of positive integers, respectively. We use to express the identity matrix. The ∞-norm of discrete-time signal is expressed by .
3. Application to Automatic Driving Control
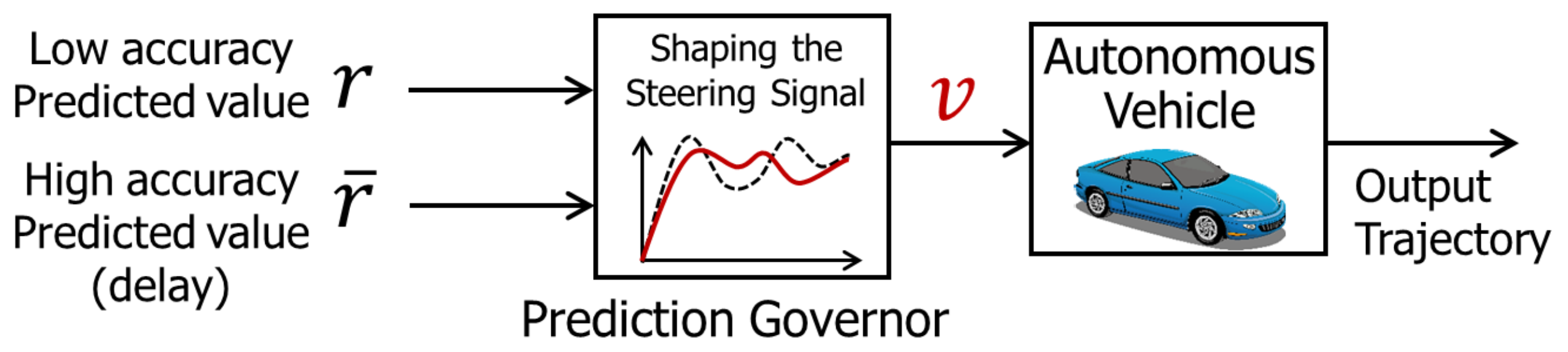
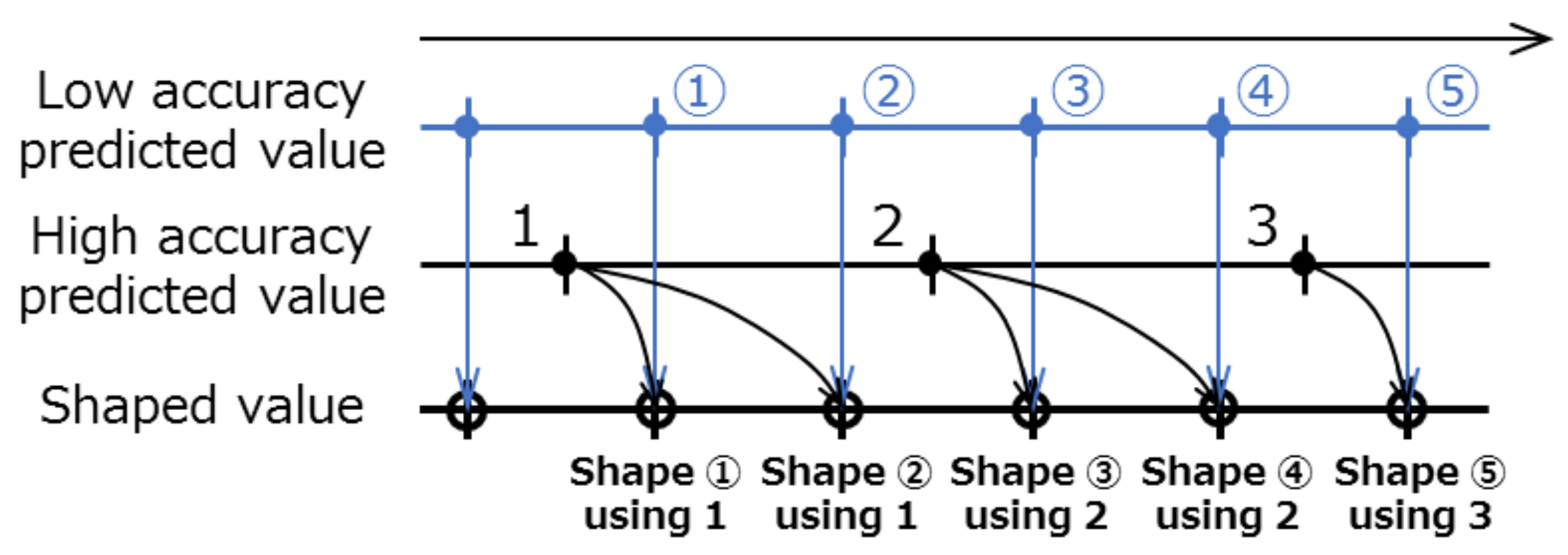
In this section, the application of the prediction governor to an automatic driving control system is described, and its usefulness is examined. A steering signal, as shown in
Figure 2, is shaped by combining low accuracy prediction, where real-time processing is feasible, and high accuracy prediction, where the processing is time consuming. The car is controlled using this shaped steering signal.
First, to verify the prediction governor’s performance, a numerical simulation of trajectory tracking was conducted and the tracking accuracy was evaluated. Next, to examine the usefulness of the prediction governor, actual lane-keeping experiments were conducted using a radio controlled car.
3.1. Simulation
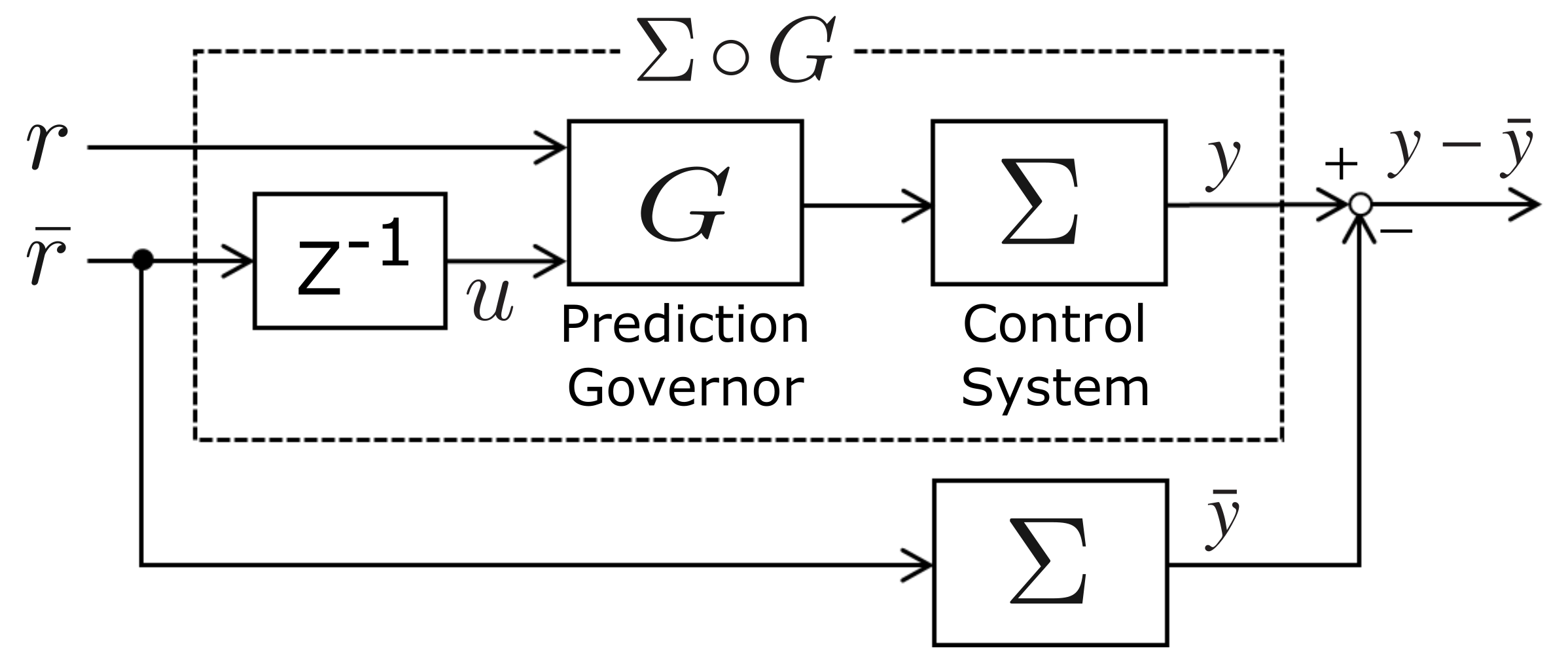
Let us consider system
in
Figure 1. System
is a four-wheel car model and is given by
where
is the sampling time and
V is the vehicle translation speed (constant).
x denotes the state of
and is defined by
(initial value
) in terms of the vehicle position (
) and the yaw angle
.
v is the input corresponding to the the vehicle yaw rate.
y is the output response, where
is set by focusing on vehicle yaw angle
. Moreover, in
, the predicted values
r and
are the target yaw rates for the four-wheel car, where
r is the low accuracy predicted value and
is the high accuracy predicted value.
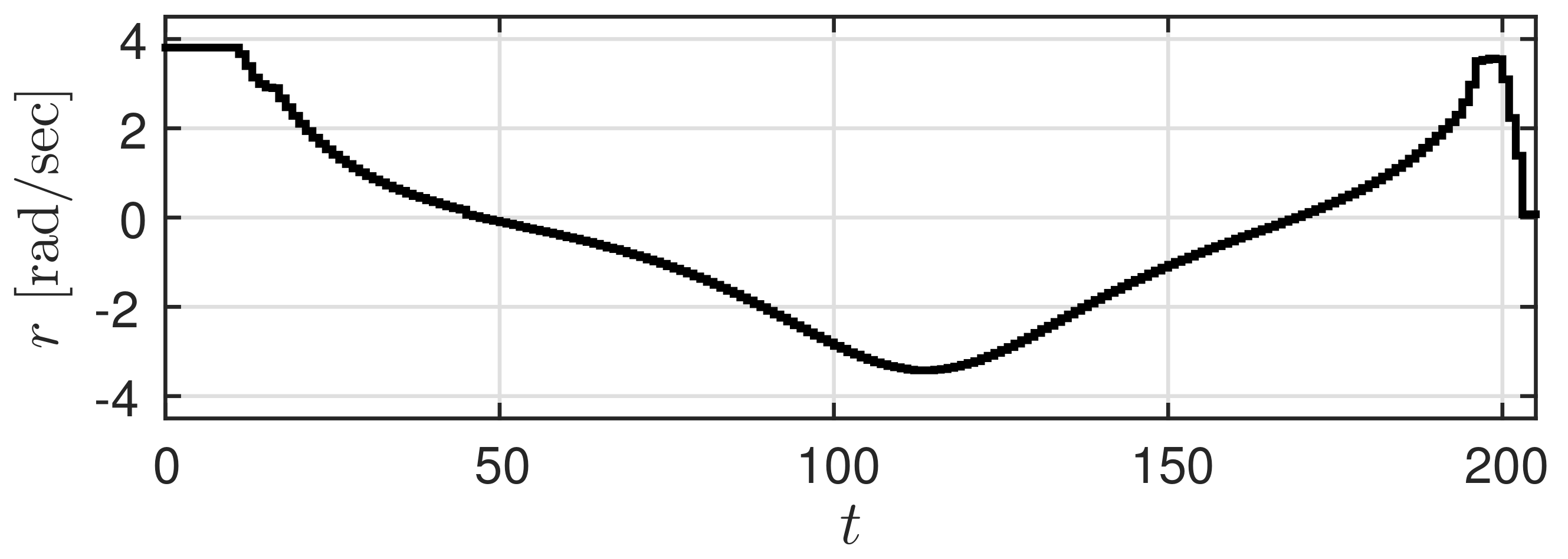
Let us suppose
(s) and
(mm/s). Let the low accuracy predicted value
be given by
Figure 3, and the high accuracy predicted value
obtained with a slight delay be given by
Figure 4 (
is the maximum value of
). Here, a trajectory that needs to be realized by the car (true trajectory) is set for the high accuracy predicted value and a trajectory that deviates slightly from this trajectory is set for the low accuracy predicted value. At this time,
r is shaped using prediction governor
G, generating the shaped value
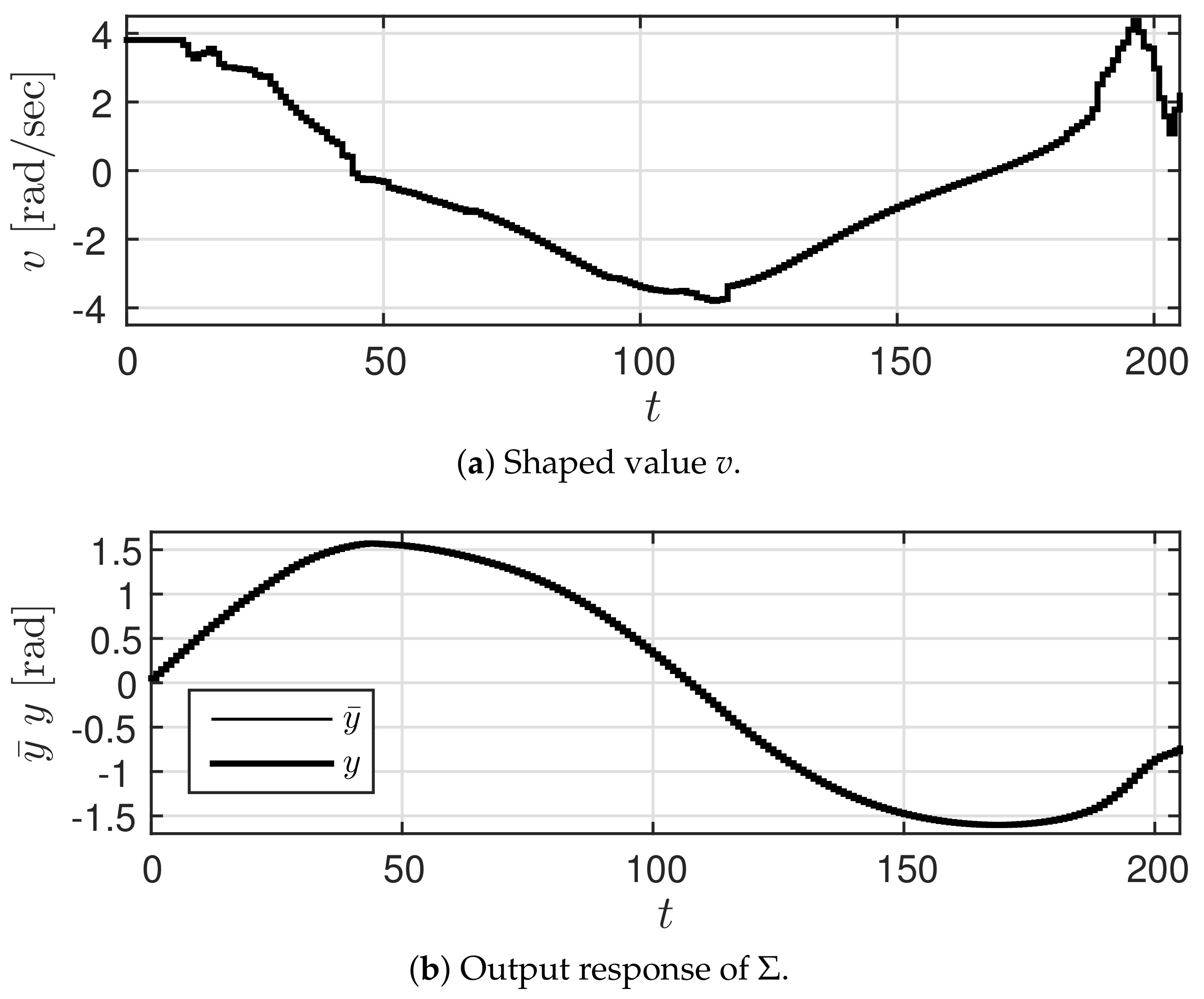
v. The results of using the prediction governor are shown in
Figure 5.
Figure 5a shows the shaped value
v and
Figure 5b shows the output response
y of
.
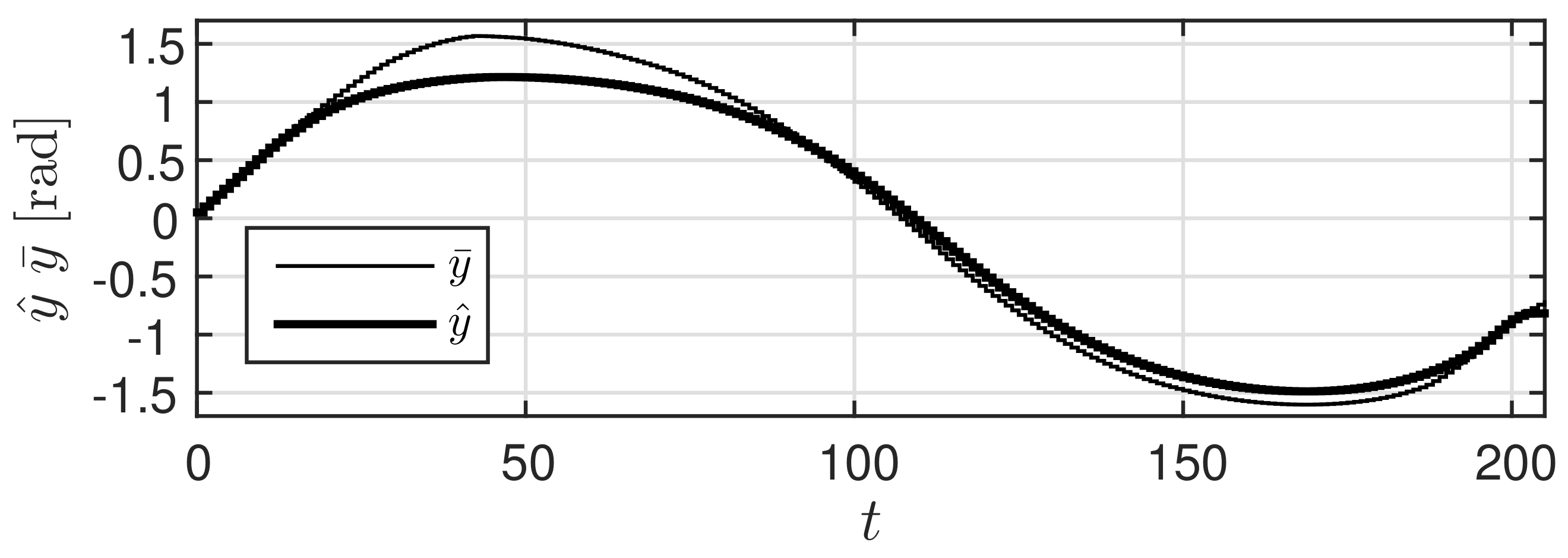
In
Figure 5b, the thin line represents the system response
(behavior of yaw angle
) using the high accuracy predicted value
from
Figure 4, while the thick line represents the system response
y (behavior of yaw angle
) using the shaped value
v. It can be observed that the two responses overlap. In contrast,
Figure 6 shows the result
(behavior of yaw angle
) obtained using the low accuracy predicted value
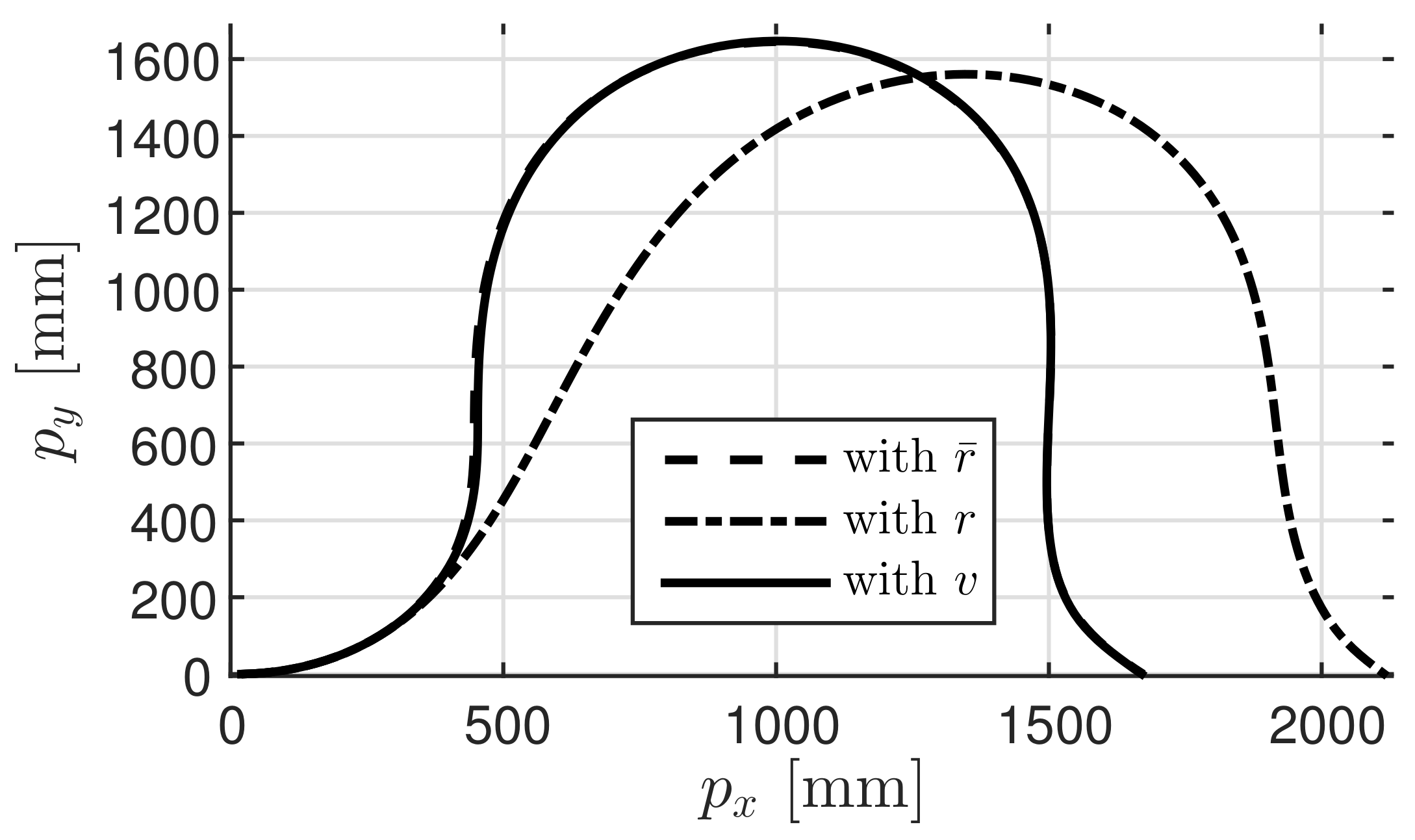
r. Further,
Figure 7 shows the trajectory of the car along the
plane. In this figure, the dashed line, the dot-dashed line, and the solid line represent the trajectories obtained using
,
r, and
v, respectively. These figures confirm that the response obtained using shaped value
v is closer to the output response obtained using
than that obtained using
r. At this time, the value of
was 0.0282 and that of
was 0.3693. These results confirm that the prediction governor was operating appropriately. Moreover, the calculated value of the right hand side of (
9) was 0.0282. This suggests that it is possible to estimate in advance the difference in outcome.
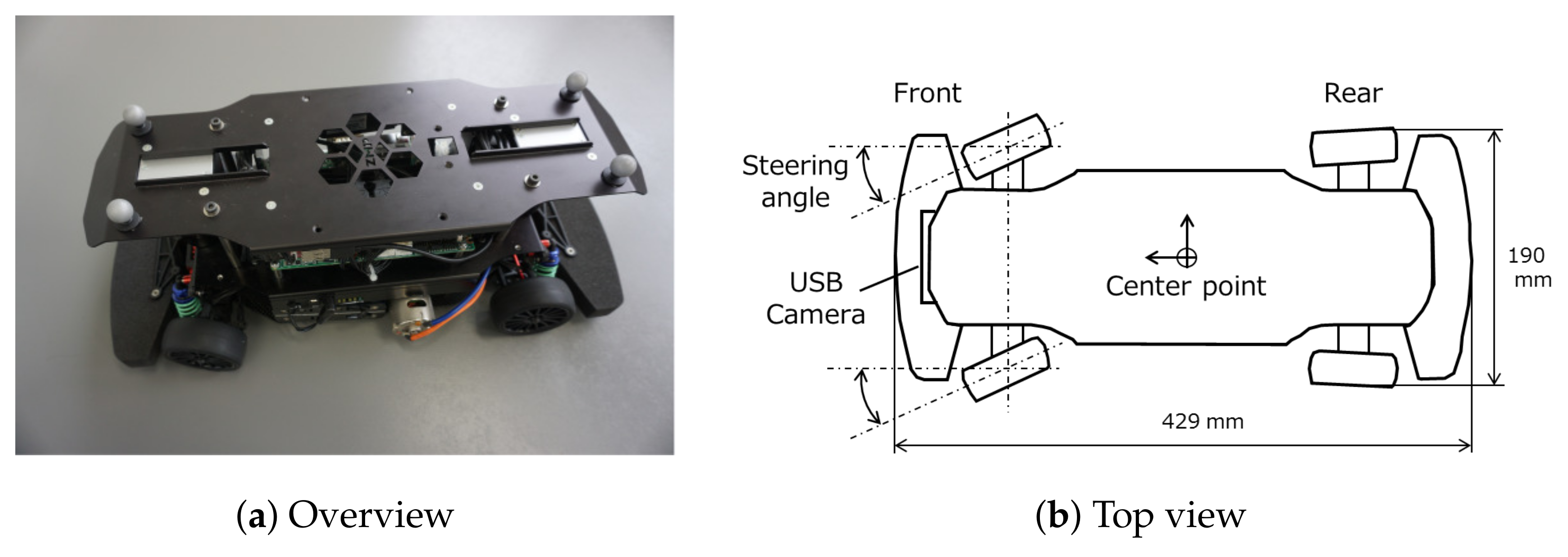
3.2. Experiment
A RoboCar 1/10 2016 from ZMP Inc., as shown in
Figure 8, was used in the experiments.
Table 1 shows the specification of the RoboCar.
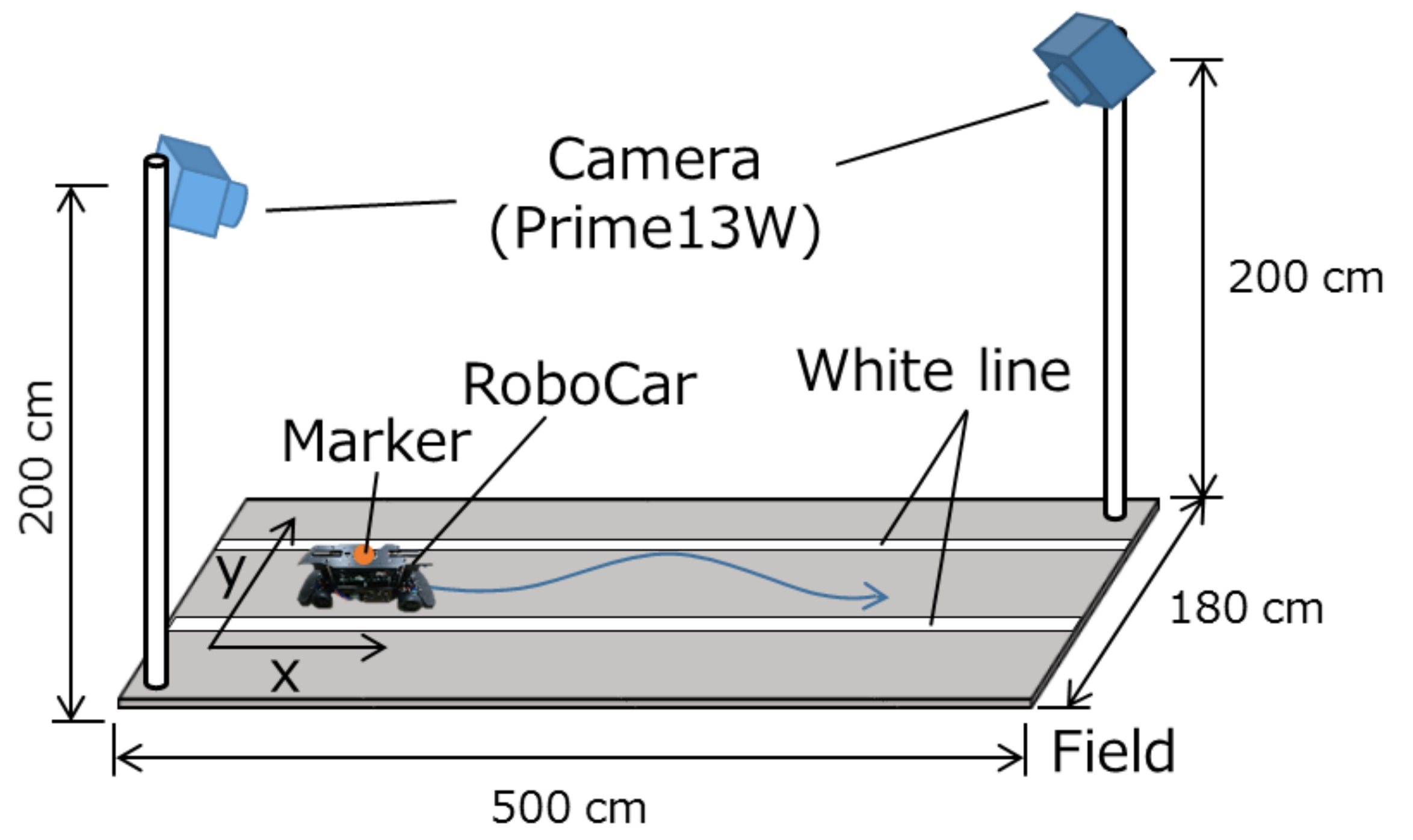
Figure 9 shows the experimental setup. Two white lines were drawn on the field. As depicted in
Figure 9, position measurement cameras (OptiTrack Prime13W) were placed at both ends of the field to capture the RoboCar’s travel trajectory. First, the image captured by the camera mounted on the RoboCar was obtained and the traveling route was predicted by analyzing this image. Next, based on the predicted route the steering angle of the RoboCar was controlled.
In the process of predicting the traveling route, two types of image processing algorithms were used. In the first algorithm (Image Processing 1), the images captured by the camera were converted to binary images, and from the images corresponding to the position of the white lines 300 (mm) ahead of the front end of the car the coordinates on the image were determined. The mid point between the white lines was then calculated using these coordinates. In the second algorithm (Image Processing 2), after binarization, using a differential filter and Hough transformation together with processing such as clustering, the white lines were detected. The crossing point (vanishing point) of these two lines was then calculated. In this study, the aforementioned two methods of image processing were executed simultaneously in the RoboCar.
As shown in
Figure 10, for a sampling period of
= 0.07 (s), although Image Processing 1 can be conducted in real time, there is a time lag for Image Processing 2, as it requires more time. In this study, based on experiments conducted in advance to estimate the white line position, the yaw rate signal obtained using the results of Image Processing 1 was set as the low accuracy predicted value, and the yaw rate signal obtained using the results of Image Processing 2 was set as the high accuracy predicted value. Using the prediction governor, in each step, the low accuracy predicted value was then shaped using the high accuracy predicted value, and the RoboCar was run using this shaped value.
Since the actual input to the RoboCar is the steering angle, the yaw rate signal v is used after converting it into steering angle s (rad) using the transformation . Here, L is the distance between the front and rear wheel axles and was set as (mm) in the experiments V is the speed of the car and was set at a constant value of (mm/s).
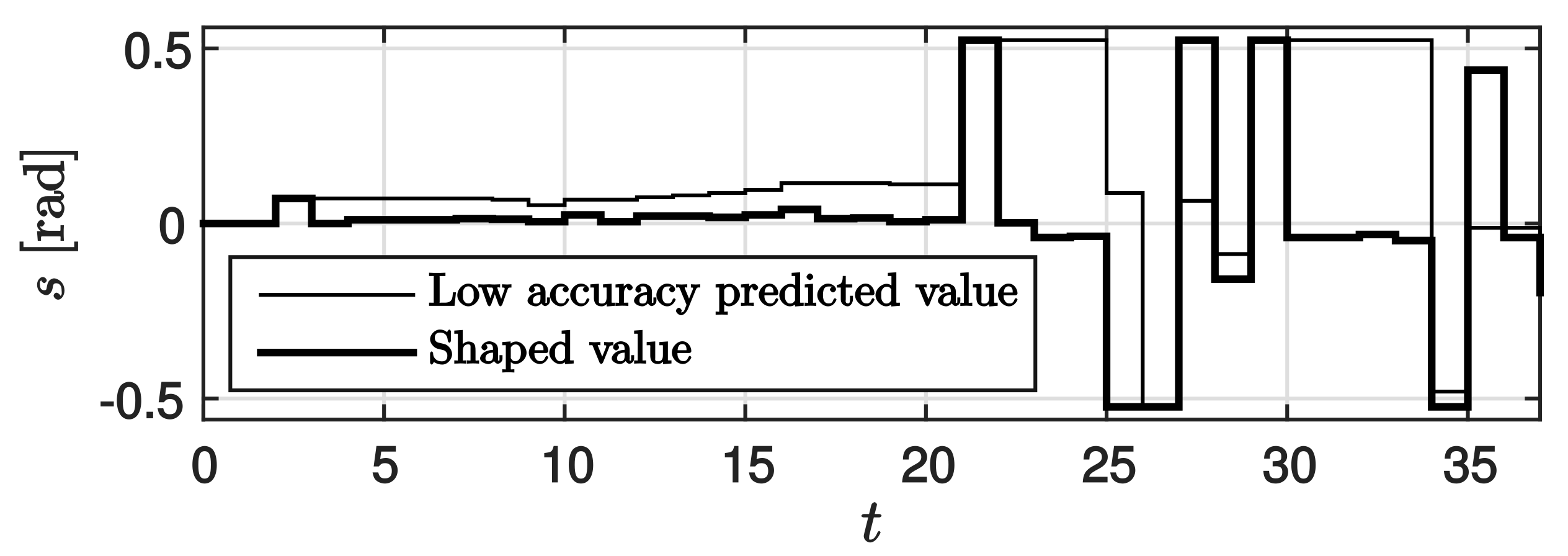
The results of the experiments are shown in the following figures. The results of applying the prediction governor, as shown in
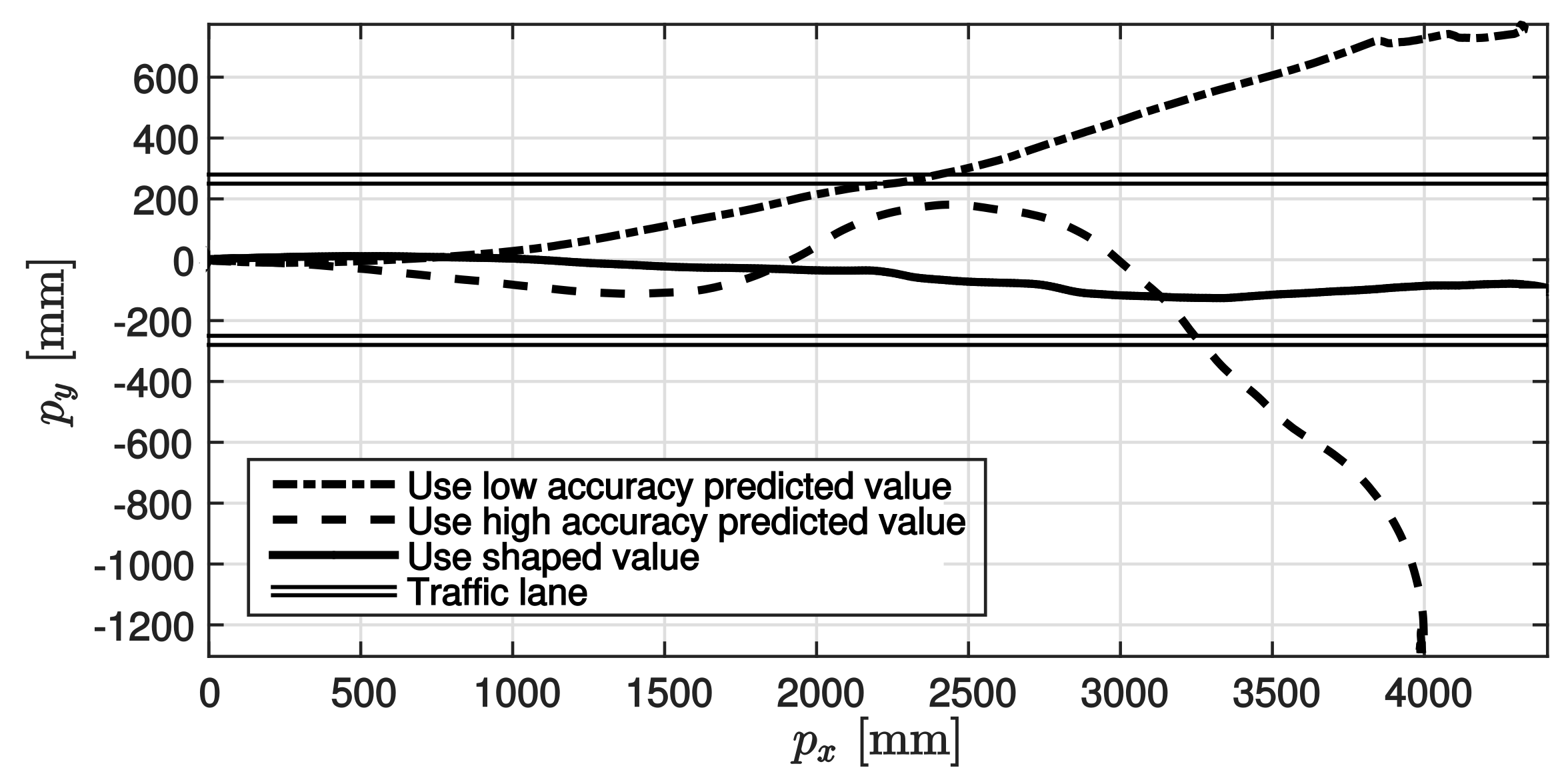
Figure 11, suggest that the steering angle represented by the thin line is shaped as indicated by the thick line. The corresponding trajectories are shown in
Figure 12. In
Figure 12, the double lines show the two white lines of the traffic lane. The dot-dashed line shows the trajectory when the low accuracy predicted value only was used, the dashed line shows the trajectory when the high accuracy predicted value only was used, and the solid line shows the trajectory when the nonlinear prediction governor was used in driving control. As observed in the results, first, the travel trajectory based on low accuracy predicted value only deviated widely from the traffic lane because of misrecognition of the white lines. Further, the travel trajectory based on the high accuracy predicted value only, deviated from the traffic lane because of the time lag. In contrast, by applying the prediction governor, the erroneous steering signal was shaped and deviation from the traffic lane was avoided. The results confirmed that the control performance was improved by applying the prediction governor. Finally, it is also stressed that a satisfactory performance could be obtained by using the prediction governor even though a controller was designed without the consideration of lane-keeping constraints. Therefore, this experimental result illustrated the practical benefits of the proposed method.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}