Technology Acceptance and User-Centred Design of Assistive Exoskeletons for Older Adults: A Commentary


Abstract
:1. Introduction
- Robust control
- Safety and dependability
- Ease of wear ability/portability
- Usability/acceptance
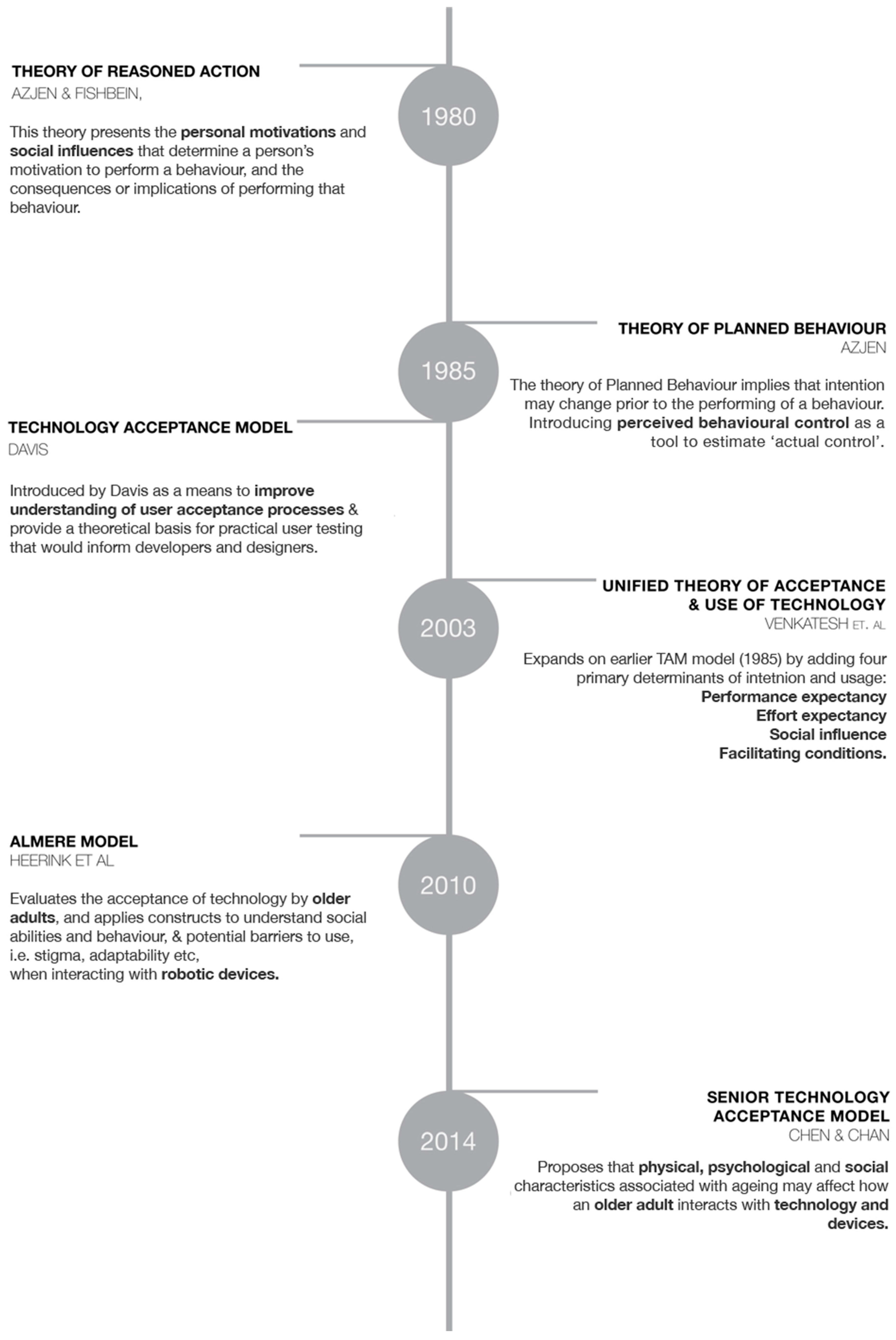
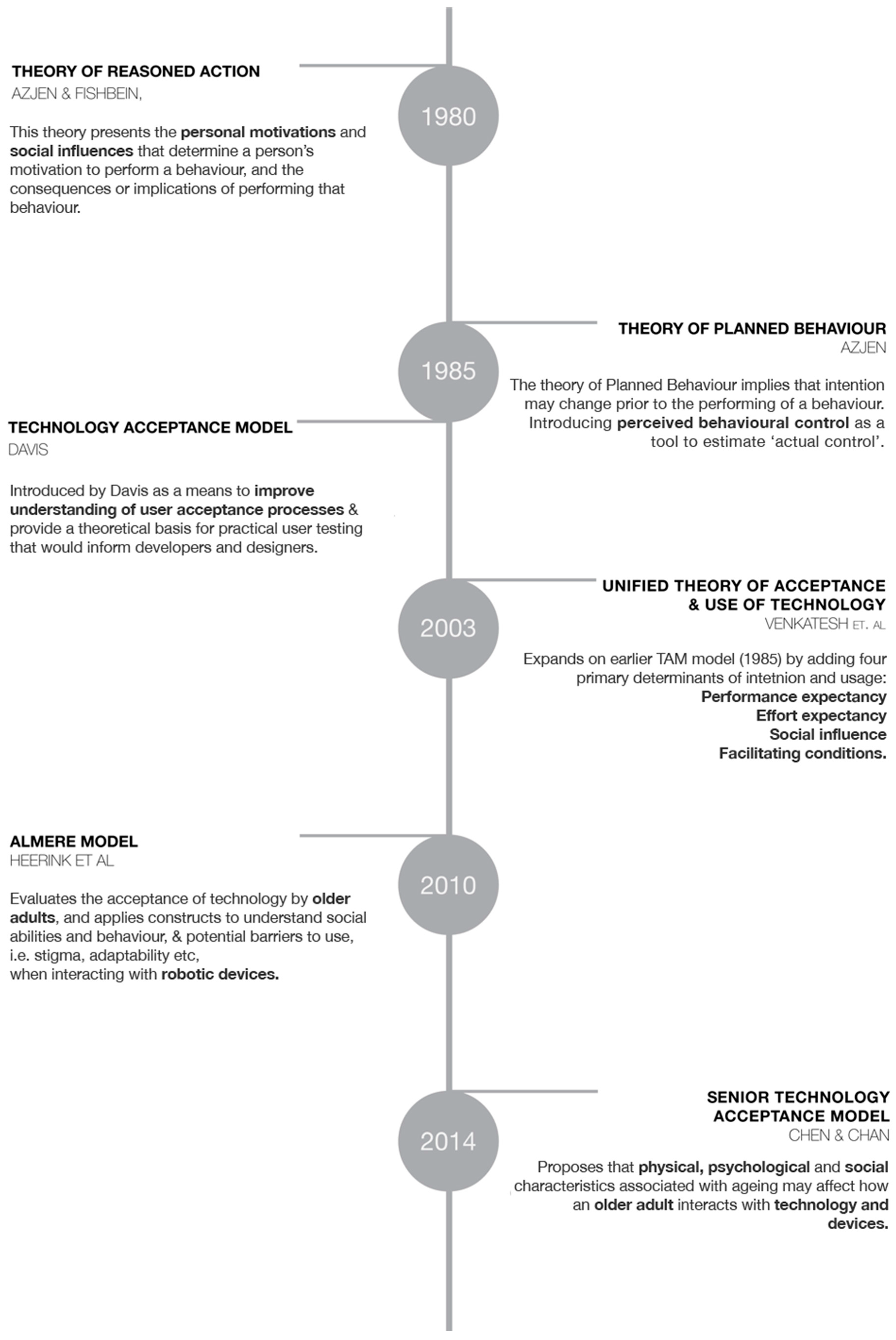
2. Technology Acceptance Models
- Theory of reasoned action [32]
- Theory of planned behaviour [33]
- Technology acceptance model [34]
- Unified theory of acceptance and use of technology [35]
- The Almere model [30]
- Senior technology acceptance model [31]
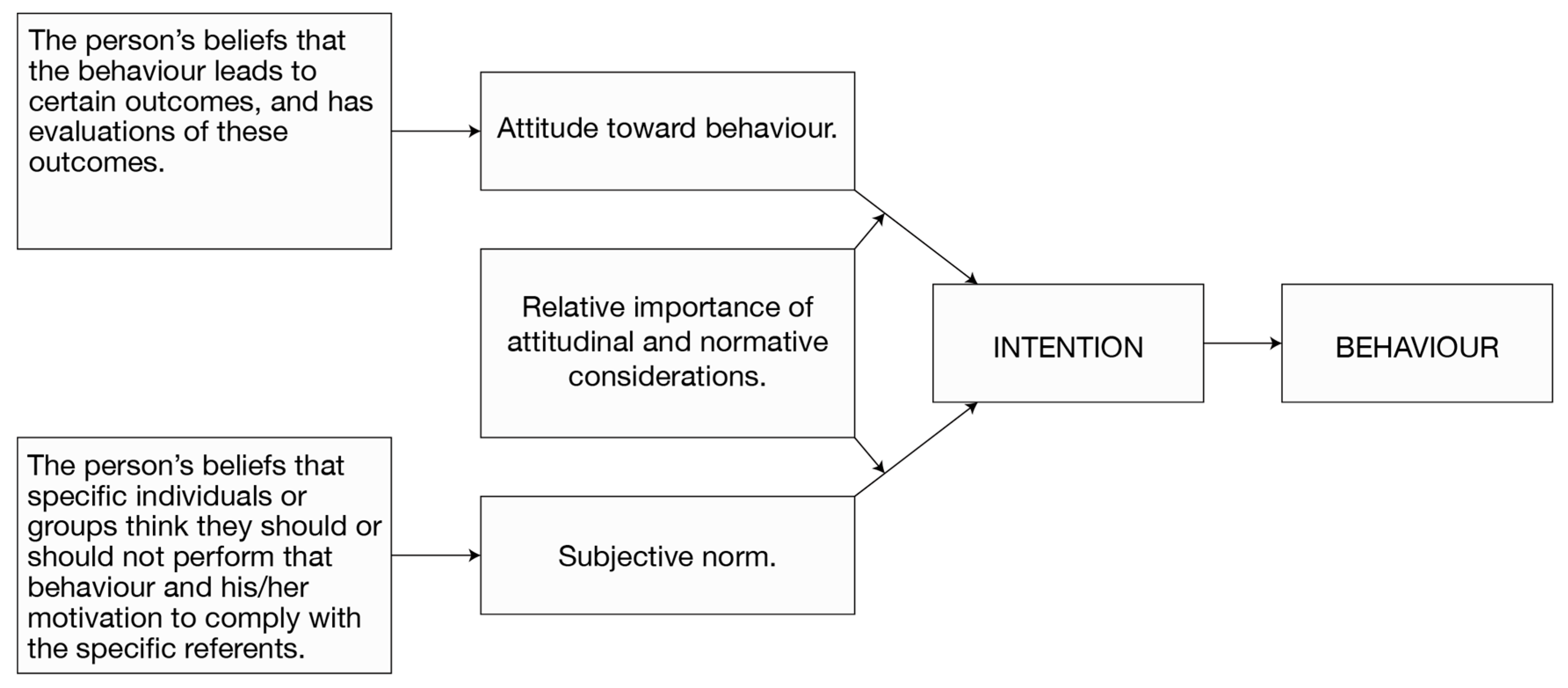
2.1. Theory of Reasoned Action (TRA)
2.2. Theory of Planned Behaviour (TPB)
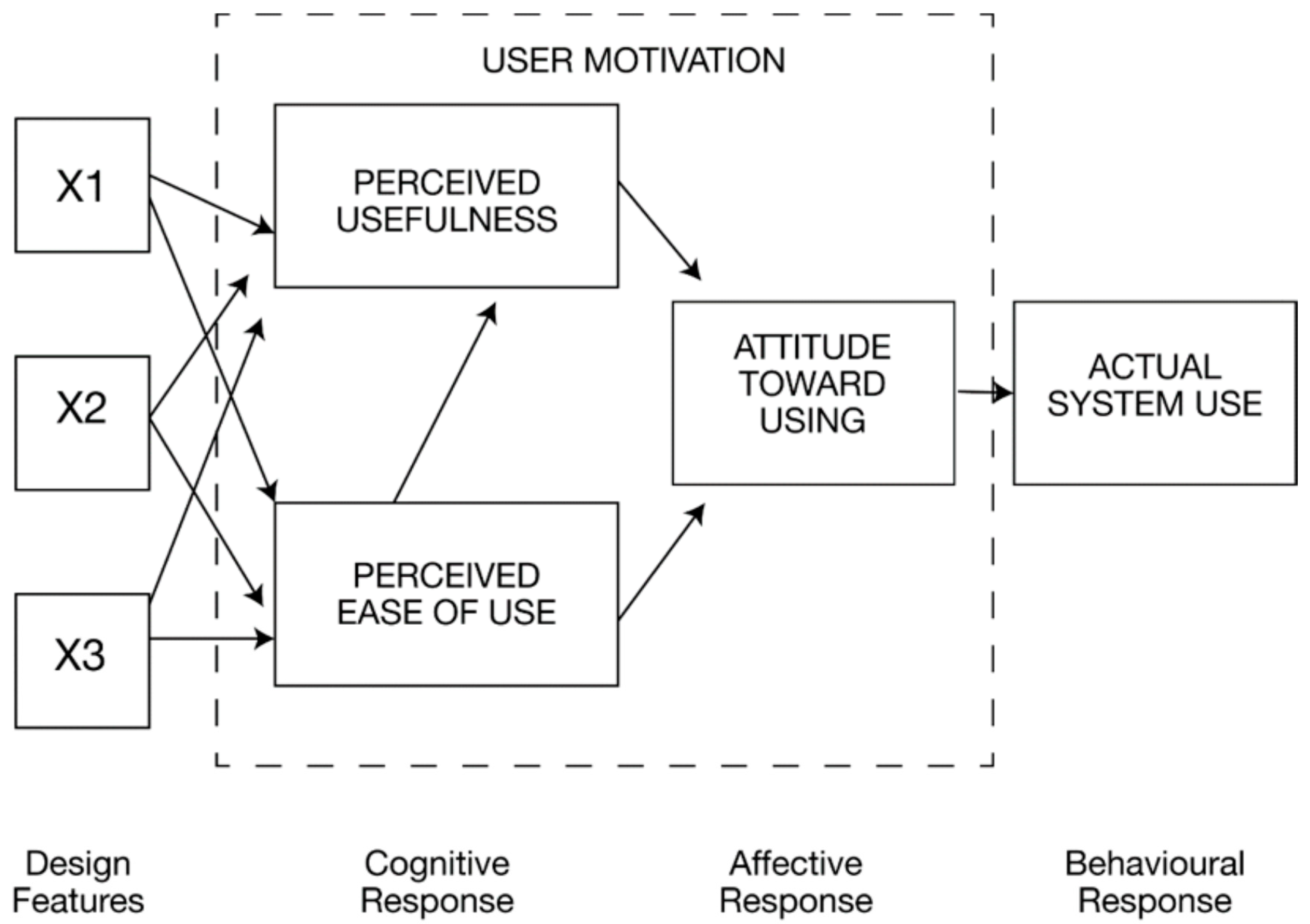
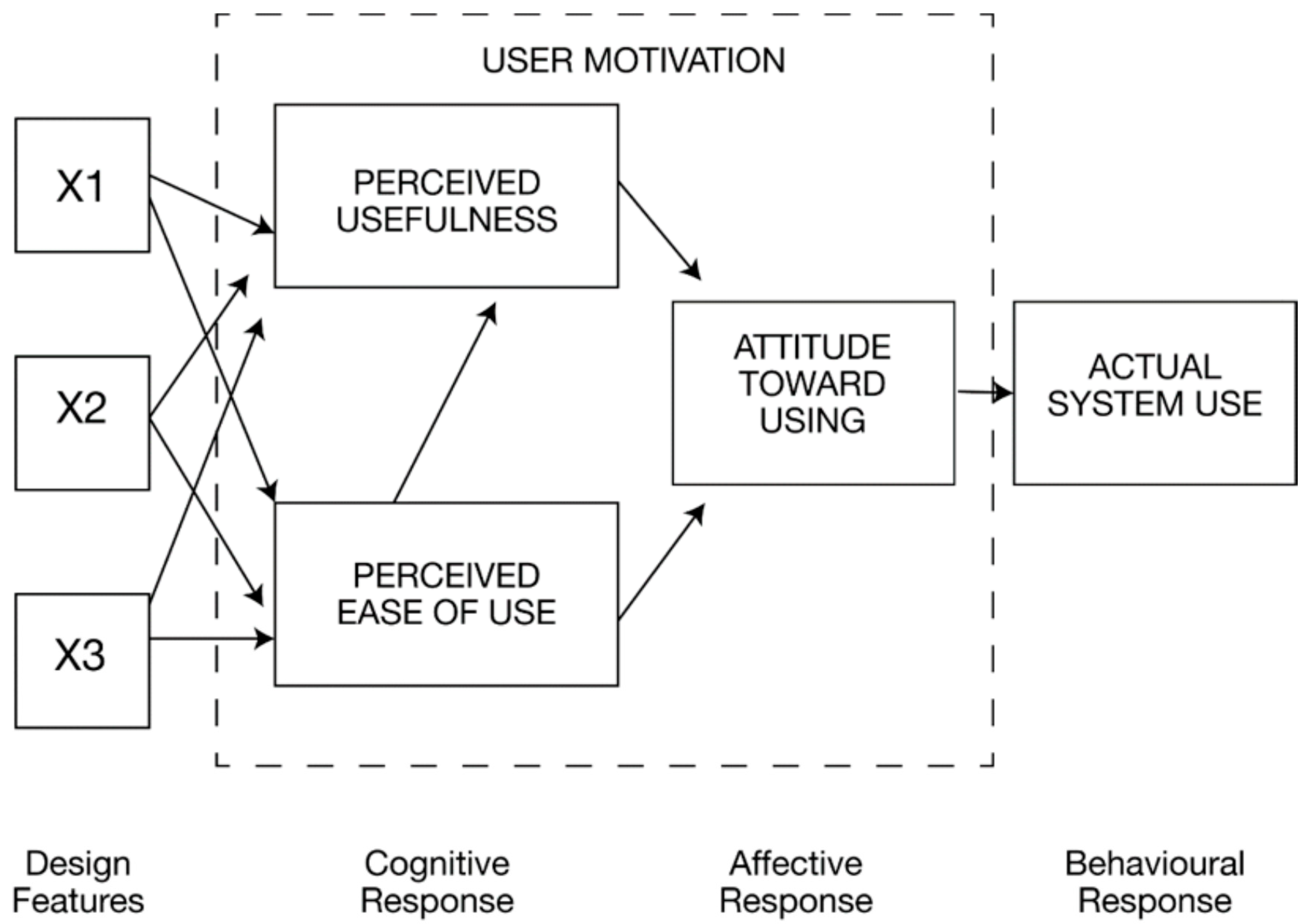
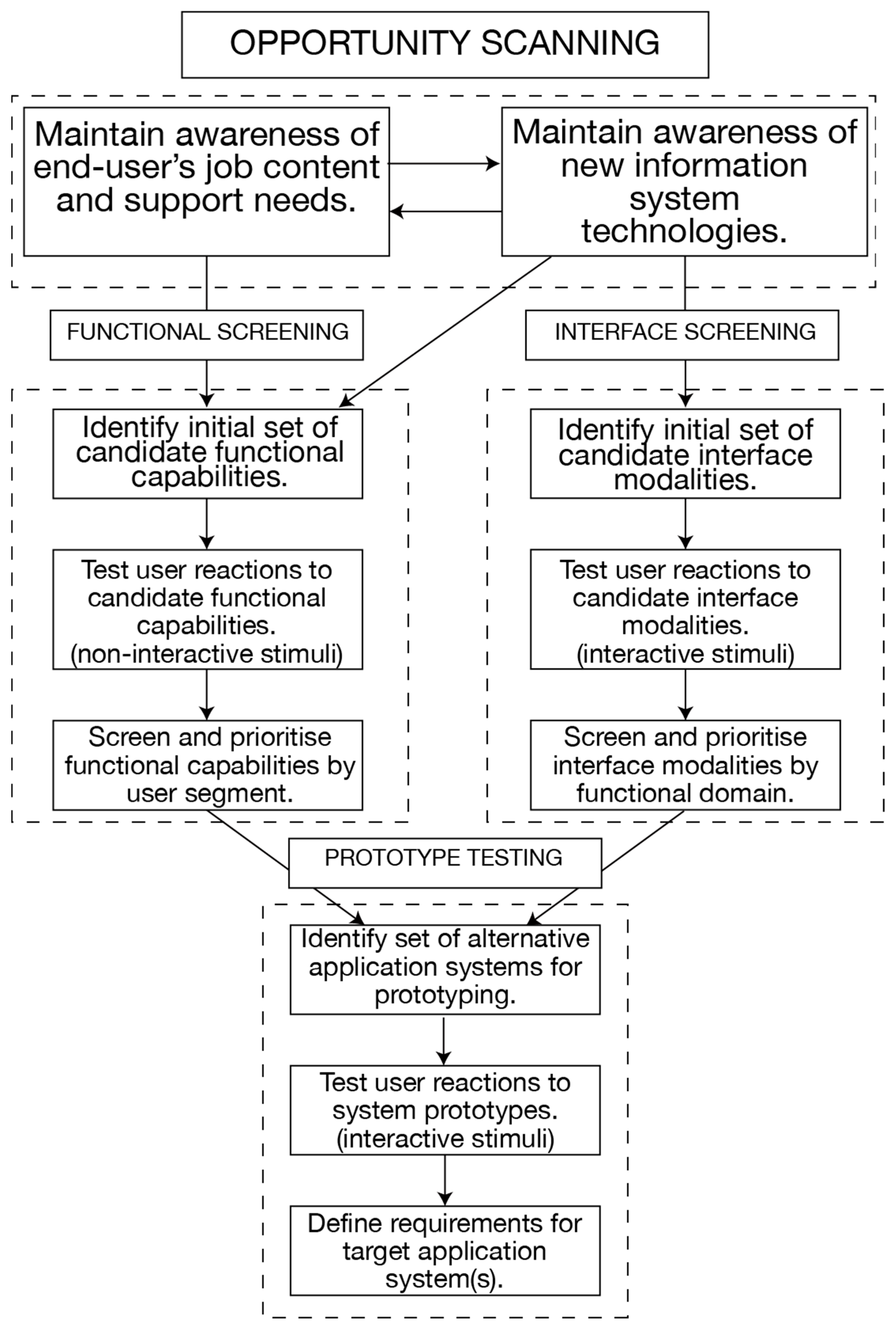
2.3. Technology Acceptance Model (TAM)
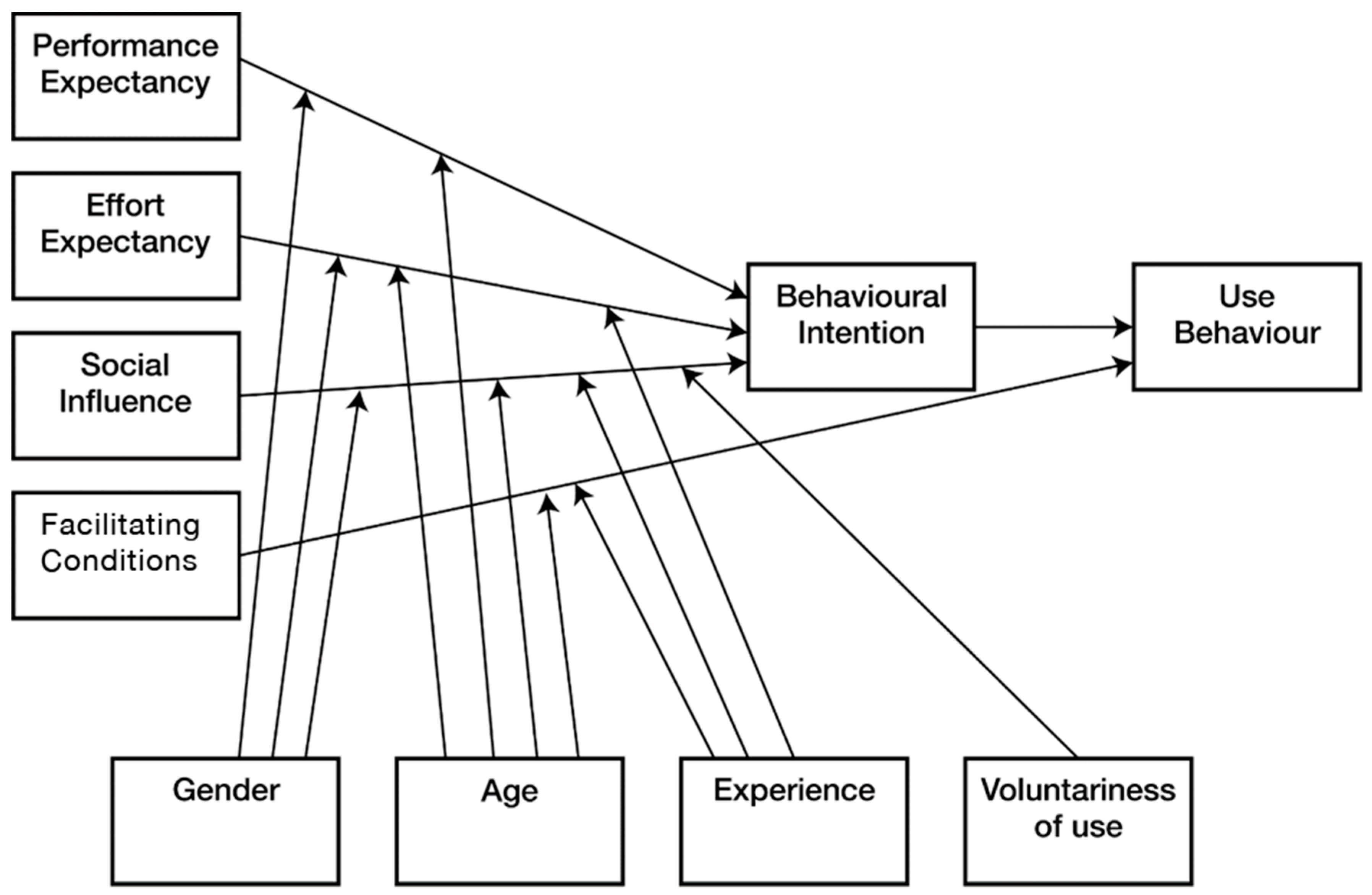
2.4. Unified Theory of Acceptance and Use of Technology (UTAUT)
- Performance expectancy—e.g., I would find the system useful in my job.
- Effort expectancy—e.g., It would be easy for me to become skilful at using the system.
- Attitude toward using technology—i.e., using the system is a bad/good idea.
- Social influence—e.g., People who influence my behaviour think that I should use the system.
- Facilitating conditions—e.g., I have the resources necessary to use the system.
- Self-efficacy—e.g., I could complete a job or task using the system…if I could call someone if I got stuck.
- Anxiety—e.g., It scares me to think that I could lose a lot of information using the system by hitting a wrong key.
- Behavioural intention to use the system—e.g., I intend to use the system in the next number of months.
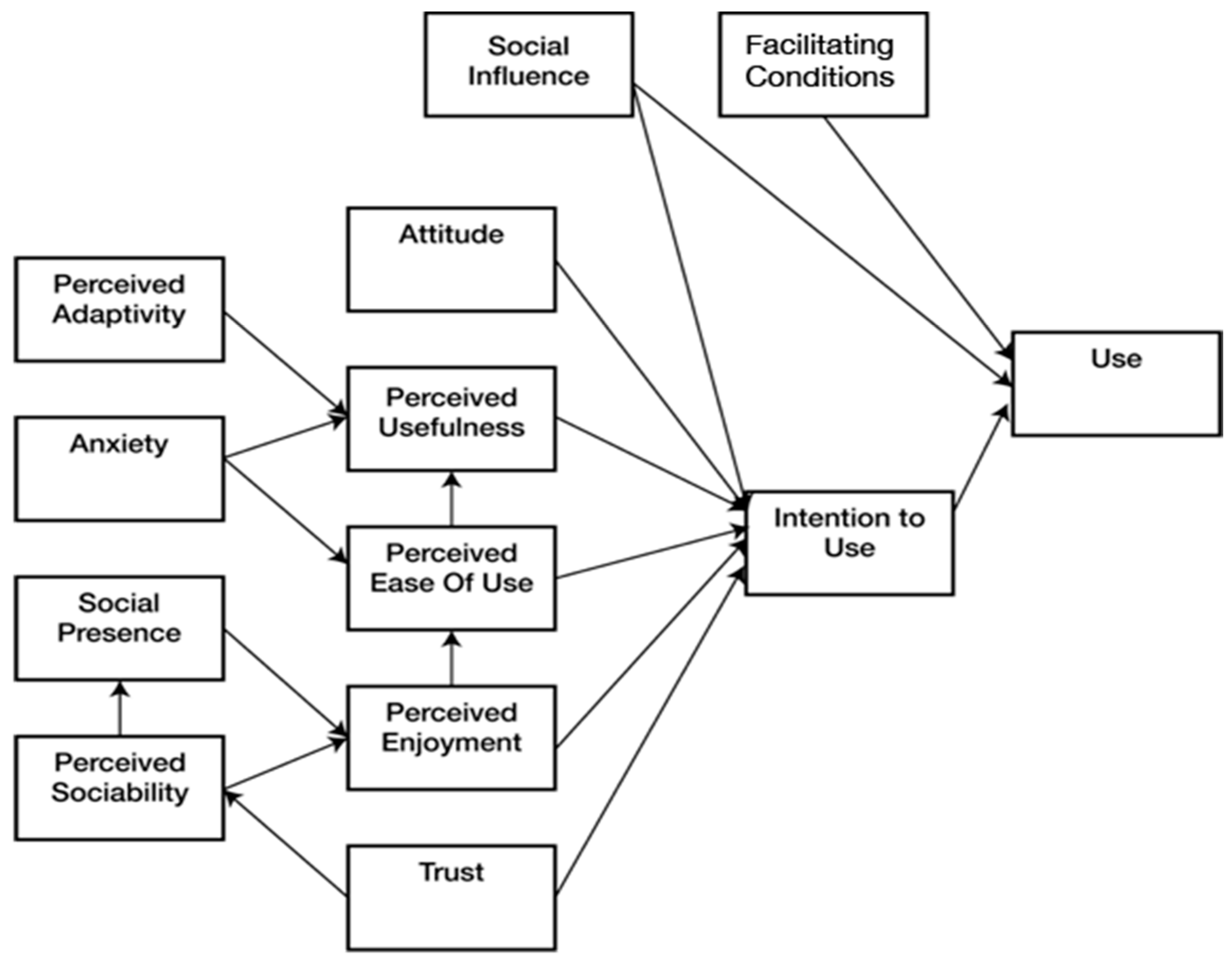
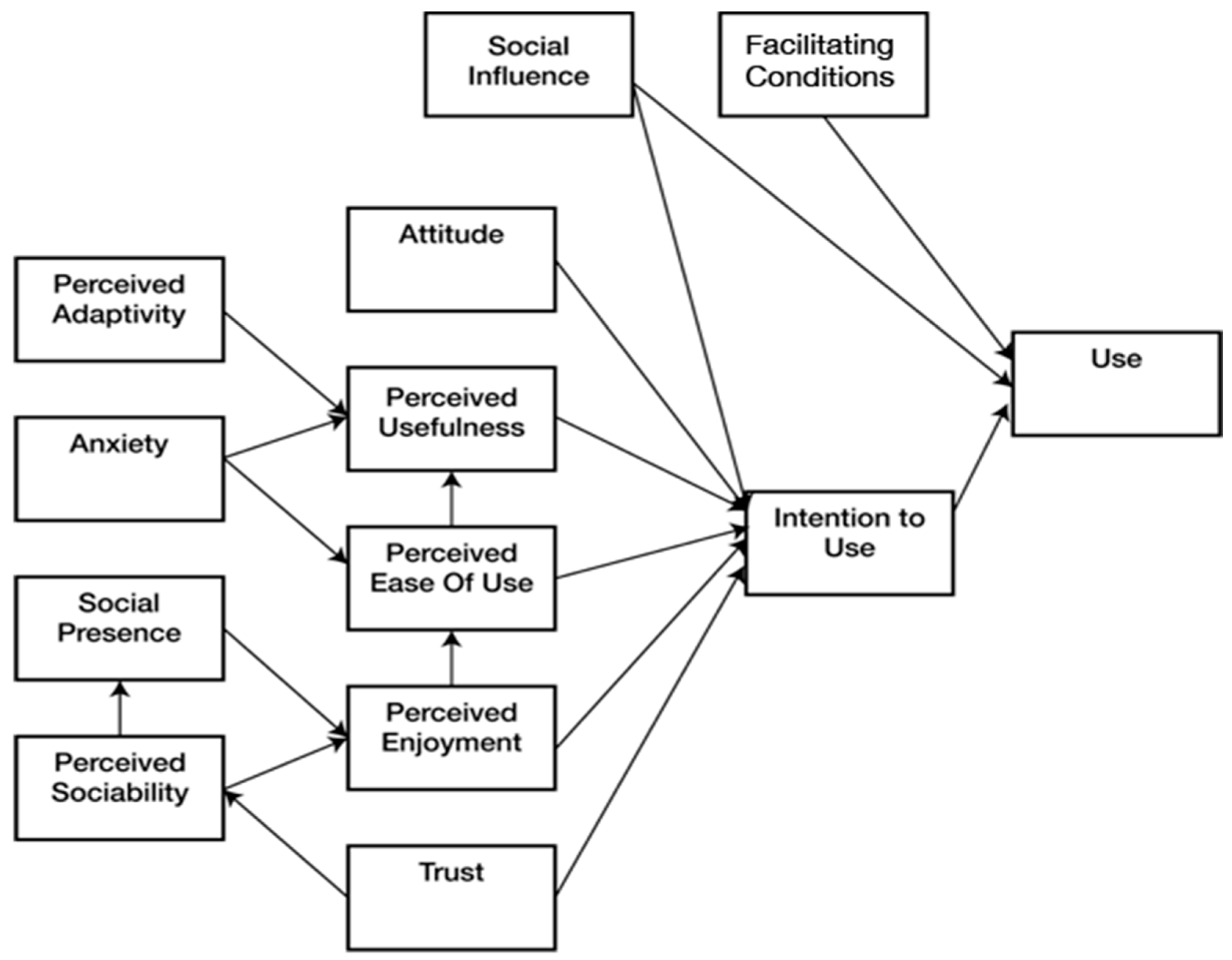
2.5. Almere TAM
- Anxiety—anxious or emotional reactions when using the system
- Attitude—positive or negative feelings about the application of the technology
- Facilitating conditions—objective factors in the environment that facilitate using the system
- Intention to use—The outspoken intention to use the system over a longer period of time
- Perceived adaptability—the perceived ability of the system to be adaptive to the changing needs of the user
- Perceived enjoyment—feelings of joy or pleasure by the user associated with the use of the system
- Perceived ease of use—the degree to which the user believes that using the system would be free of effort
- Perceived sociability—the perceived ability of the system to inform sociable behaviour
- Perceived usefulness—the degree to which a person believes that using the system would enhance his or her daily activities
- Social influence—the user’s perception of how people who are important to them think about him/her using the system
- Social presence—the experience of sensing a social entity when interacting with the system
- Trust—the belief that the system performs with integrity and reliability
- Use—the actual use of the system over a longer period of time
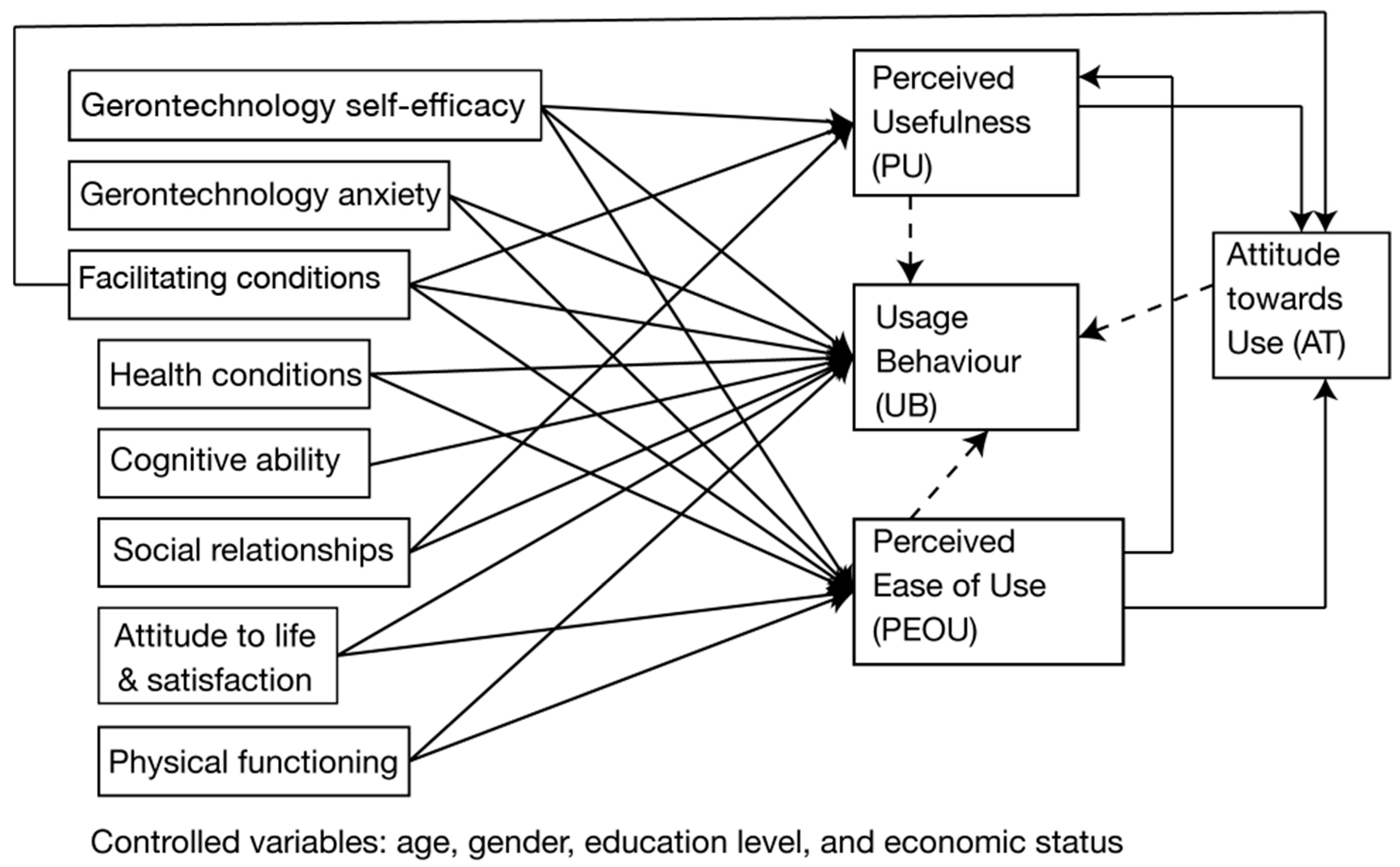
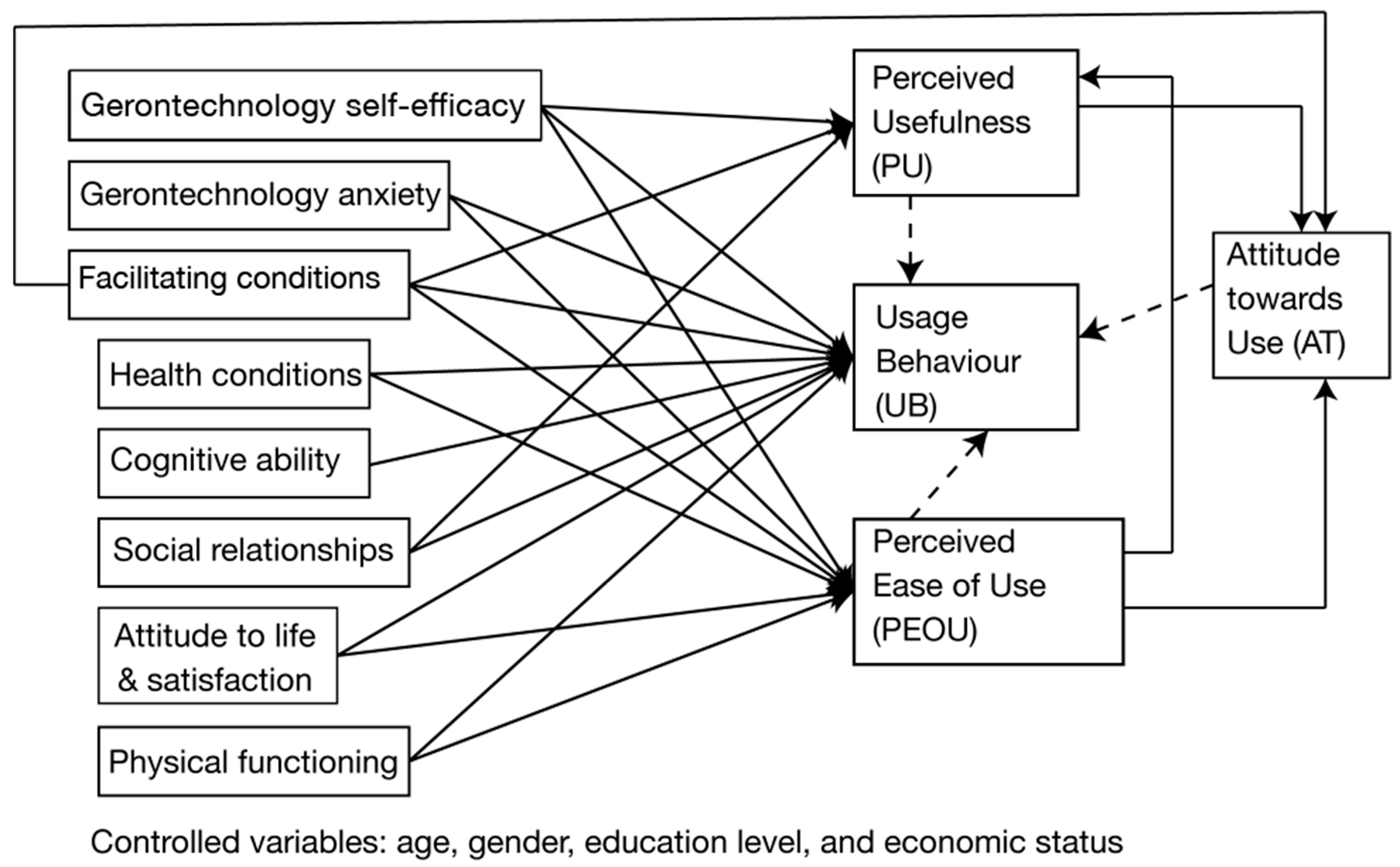
2.6. Senior Technology Acceptance Model (STAM)
3. Discussion
3.1. TAMs and Assistive Technology Models
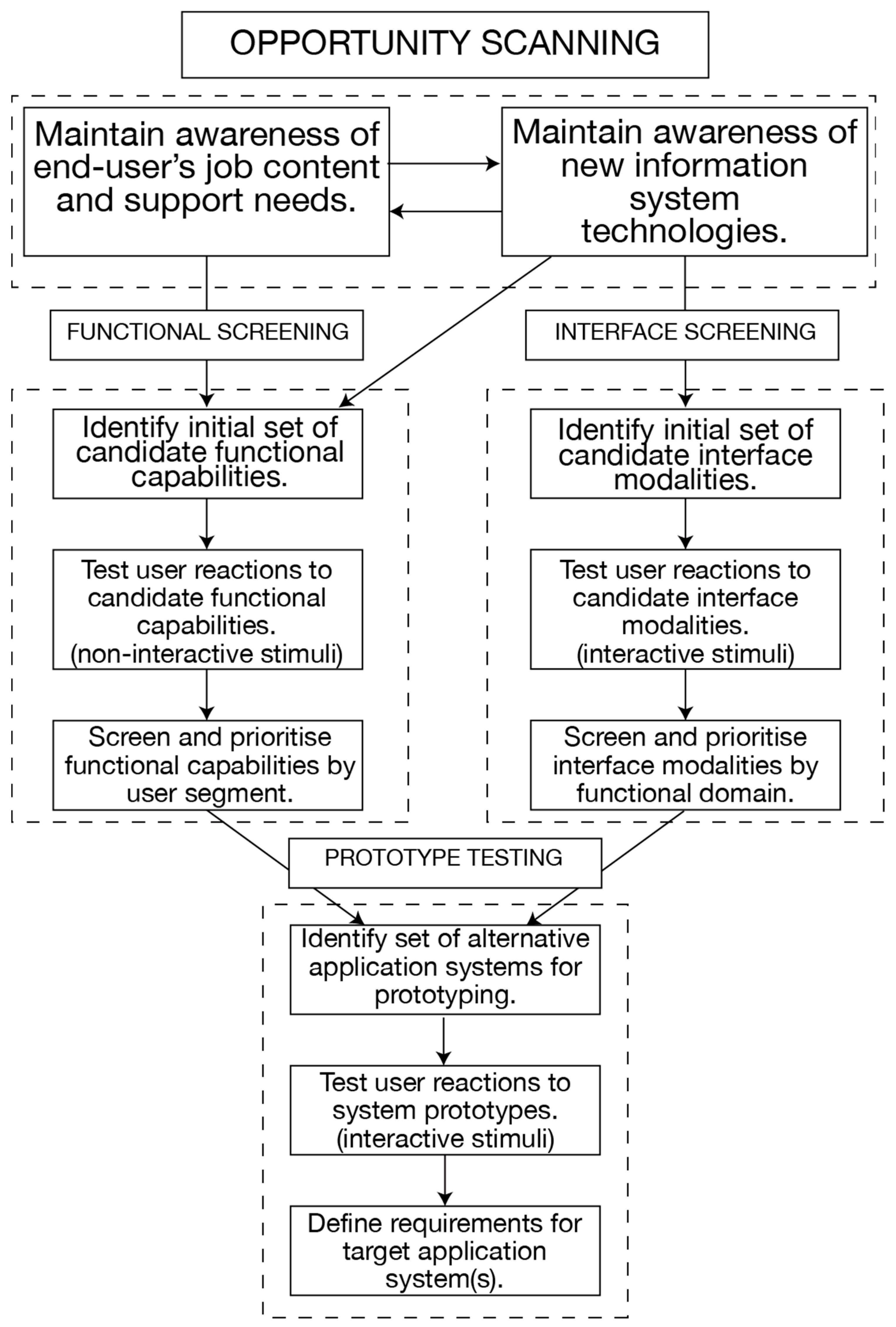
3.2. User-Centred Design of Assistive Exoskeletons
3.3. Practical Approaches to User-Centred Design of Exoskeletons
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Active and Assisted Living Joint Programme (AAL). Demographic Change Ageing Begins at Birth. 2016. Available online: http://www.aal-europe.eu/about/demographic-change/ (accessed on 22 August 2017).
- WHO. World Report on Disability. 2011. Available online: http://www.who.int/disabilities/world_report/2011/report.pdf (accessed on 15 November 2017).
- Bedaf, S.; Huijnen, C.; van den Heuvel, R.; de Witte, L. Robots supporting care for elderly people. In Robotic Assistive Technologies; CRC Press: Boca Raton, FL, USA, 2017; Chapter 9; pp. 309–332. [Google Scholar]
- Borisoff, J.; Khalili, M.; Ben Mortenson, W.; Van der Loos, H.F.M. Exoskeletons as an assistive technology for mobility and manipulation. In Robotic Assistive Technologies; CRC Press: Boca Raton, FL, USA, 2017; Chapter 6; pp. 179–218. [Google Scholar]
- Lauer, E.A.; Houtenville, A.J. Annual Disability Statistics Compendium: 2016. Available online: https://disabilitycompendium.org/sites/default/files/user-uploads/2016%20Annual%20Disability%20Statistics%20Compendium.pdf (accessed on 15 November 2017).
- European Commission. Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions European Disability Strategy 2010–2020: A Renewed Commitment to a Barrier-free Europe. 2010. Available online: http://eur-lex.europa.eu/legal-content/EN/ALL/?uri=celex:52010DC0636 (accessed on 10 December 2017).
- Manini, T.M. Mobility decline in old age: A time to intervene. Available online: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3530168/ (accessed on 31 October 2017).
- Research and Markets. Wearable Robots, Exoskeleton: Market Shares, Strategies, and Forecasts, Worldwide, 2016–2021. Available online: http://www.researchandmarkets.com/reports/3700034/wearablerobots-exoskeleton-market-shares (accessed on 25 August 2017).
- Young, A.; Ferris, D. State-of-the-art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabilit. Eng. 2016, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Smarr, C.A.; Mitzner, T.L.; Beer, J.M.; Prakash, A.; Chen, T.L.; Kemp, C.C.; Rogers, W.A. Domestic robots for older adults: Attitudes, preferences, and potential. Int. J. Soc. Robot. 2013, 6, 229–247. [Google Scholar] [CrossRef] [PubMed]
- Bemelmans, R.; Gelderblom, G.J.; Jonker, P.; de Witte, L. Socially assistive robots in elderly care: A systematic review into effects and effectiveness. J. Am. Med. Dir. Assoc. 2012, 13, 114–120. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.H.; Damnée, S.; Kerhervé, H.; Ware, C.; Rigaud, A.S. Bridging the digital divide in older adults: A study from an initiative to inform older adults about new technologies. Clin. Interv. Aging 2015, 10, 193–201. [Google Scholar] [CrossRef] [PubMed]
- Nathan, S. Power Dressing: Why It’s Exoskeleton Time. The Engineer. Available online: https://www.theengineer.co.uk/issues/december-digi-issue/power-dressing-why-its-exoskeleton-time/ (accessed on 23 August 2017).
- Van der loos, H.F.M.; Reinkensmeyer, D.J.; Guglielmelli, E. Rehabilitation and health care robotics. In Handbook of Robotics; Springer: Berlin, Germany, 2008; p. 53. [Google Scholar]
- Katz, S. Assessing self-maintenance: Activities of daily living, mobility, and instrumental activities of daily living. J. Am. Geriatr. Soc. 1983, 31, 721–727. [Google Scholar] [CrossRef] [PubMed]
- Pigliautile, M.; Tiberio, L.; Mecocci, P.; Federici, S. The Geriatrician. In Assistive Technology Assessment Handbook; (Rehabilitation Science in Practice Series); CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2012; Chapter 13; pp. 269–299. [Google Scholar]
- Wu, Y.H.; Wrobel, J.; Cornuet, M.; Kerhervé, H.; Damnée, S.; Rigaud, A.S. Acceptance of an assistive robot in older adults: A mixed-method study of human-robot interaction over a month period in the Living Lab setting. Clin. Interv. Aging 2014, 9, 801–811. [Google Scholar] [CrossRef] [PubMed]
- Cook, A.; Polgar, J. Assistive Technologies: Principles & Practices; Elsevier/Mosby: St. Louis, MO, USA, 2015. [Google Scholar]
- Pazzaglia, M.; Molinari, M. The embodiment of assistive devices—From wheelchair to exoskeleton. Phys. Life Rev. 2016, 16, 163–175. [Google Scholar] [CrossRef] [PubMed]
- Broadbent, E.; Stafford, R.; MacDonald, B. Acceptance of healthcare robots for the older population: Review and future directions. Int. J. Soc. Robot. 2009, 1, 319–330. [Google Scholar] [CrossRef]
- Hill, D.; Holloway, C.S.; Morgado Ramirez, D.Z.; Smitham, P.; Pappas, Y. What are user perspectives of exoskeleton technology? A literature review. Int. J. Technol. Assess. Health Care 2017, 33, 160–167. [Google Scholar] [CrossRef] [PubMed]
- Wolff, J.; Parker, C.; Borisoff, J.; Mortenson, W.B.; Mattie, J. A survey of stakeholder perspectives on exoskeleton technology. J. Neuroeng. Rehabilit. 2014, 11, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Charness, N.; Jastrzembski, T.S. Gerontechnology. In Future Interaction Design II; Saariluoma, P., Isomaki, H., Eds.; Springer-Verlag: London, UK, 2009; pp. 1–29. ISBN 978-1-84800-300-2. [Google Scholar]
- Harrington, T.L.; Harrington, M.K. Gerontechnology Why and How; Herman Bouma Foundation of Gerontechnology: Eindhoven, The Netherlands, 2000. [Google Scholar]
- Randolph, A.B.; Hubona, G.S. Organizational and individual acceptance of assistive interfaces and technologies. In Human-computer Interaction and Management Information Systems: Applications; M.E. Sharpe, Inc.: Armonk, NY, USA; London, UK, 2006; Volume 6, pp. 379–400. [Google Scholar]
- International Organization for Standardization. ISO 13482: Robots and robotic devices—Safety Requirements for Personal Care Robots. 2014. Available online: https://www.iso.org/standard/53820.html (accessed on 14 November 2017).
- World Health Organisation. ICF: International Classification of Functioning, Disability and Health. Draft Practice Manual. Available online: http://www.who.int/classifications/drafticfpracticalmanual2.pdf?ua=1 (accessed on 30 October 2017).
- Federici, F.; Scherer, M.J. (Eds.) Assistive Technology Assessment Handbook; CRC Press: Boca Raton, FL, USA; New York, NY, USA, 2012. [Google Scholar]
- Venkatesh, V.; Davis, F.D. A theoretical extension of the technology acceptance model: Four longitudinal field studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Heerink, M.; Kröse, B.; Evers, V.; Wielinga, B. Assessing acceptance of assistive social agent technology by older adults: The almere model. Int. J. Soc. Robot. 2010, 2, 361–375. [Google Scholar] [CrossRef]
- Chen, K.; Chan, A.H.S. Gerontechnology acceptance by elderly Hong Kong Chinese: A senior technology acceptance model (STAM). Ergonomics 2014, 57, 635–652. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I.; Fishbein, M. Understanding Attitudes and Predicting Social Behaviour; Prentice-Hall: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Ajzen, I. From intentions to actions: A theory of planned behavior. In Action Control: From Cognition to Behavior; Kuhl, J., Beckmann, J., Eds.; Springer: Berlin, Germany, 1985. [Google Scholar]
- Davis, F.D. A Technology Acceptance Model for Empirically Testing New End-User Information Systems: Theory and Results. Ph.D. Thesis, Massachusetts Institute of Technology, MA, USA, 20 December 1985. [Google Scholar]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Lenker, J.A.; Paquet, V.L. A review of conceptual models for assistive technology outcomes research and practice. Assist. Technol. 2003, 15, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Newell, A.F. Design and the Digital Divide—Insights from 40 Years in Computer Support for Older and Disabled People; Morgan & Claypool: London, UK, 2011. [Google Scholar]
- Fisk, A.D.; Rogers, W.A.; Charness, N.; Czaja, S.J.; Sharit, J. Design for Older Adults—Principles and Creative Human Factor Approaches; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Norman, D.A. The Design of Future Things; BasicBooks: New York, NY, USA, 2007. [Google Scholar]
- Farage, M.A.; Miller, K.W.; Ajayi, F.; Hutchins, D. Design principles to accommodate older adults. Glob. J. Health Sci. 2012, 4, 2–25. [Google Scholar] [CrossRef] [PubMed]
- Rubin, J.; Chisnell, D. How to plan, design and conduct effective tests. In Handbook of Usability Testing, 2nd ed.; Wiley: Indianapolis, IN, USA, 2008. [Google Scholar]
- De Looze, M.; Bosch, T.; Krause, F.; Stadler, K.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [PubMed]
- Blomberg, J.; Giacomi, J.; Mosher, A.; Swenton-Wall, P. Ethnographic field methods and their relation to design. In Participatory Design: Principles and Practices; CRC Press: Boca Raton, FL, USA, 1993; pp. 123–155. [Google Scholar]
- Pirkl, J.J. Transgenerational Design—Products for an Ageing Population; Van Nostrand Reinhold: New York, NY, USA, 1994. [Google Scholar]
- Shah, S.G.S.; Robinson, I.; Al Shawi, S. Developing medical device technologies from users’ perspectives: A theoretical framework for involving users in the development process. Int. J. Technol. Assess. Health Care 2009, 25, 514–521. [Google Scholar] [CrossRef] [PubMed]
- O’Sullivan, L.; Power, V.; de Eyto, A.; Bauer, C.; Nikamp, C.; Schülein, S.; Müller, J.; Ortiz, J. Exploring User Requirements for a Lower Body Soft Exoskeleton to Assist Mobility. In Wearable Exoskeleton Systems: Design, Control and Applications; Bai, S., Virk, G., Sugar, T., Eds.; IET: Stevenage, UK, 2017. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unified Theory of Acceptance of Technology (UTAT) | Almere Model | Senior Technology Acceptance Model (STAM) | |
|---|---|---|---|
| Evaluated older adult perceptions and user of technology | ✘ | ✔ | ✔ |
| Affords adaptability of technologies and future thinking | ✘ | ✔ | ✘ |
| Specific to robots/social agents | ✘ | ✔ | ✘ |
| Tested with users in social environments | ✘ | ✔ | ✔ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shore, L.; Power, V.; De Eyto, A.; O’Sullivan, L.W. Technology Acceptance and User-Centred Design of Assistive Exoskeletons for Older Adults: A Commentary. Robotics 2018, 7, 3. https://doi.org/10.3390/robotics7010003
Shore L, Power V, De Eyto A, O’Sullivan LW. Technology Acceptance and User-Centred Design of Assistive Exoskeletons for Older Adults: A Commentary. Robotics. 2018; 7(1):3. https://doi.org/10.3390/robotics7010003
Chicago/Turabian StyleShore, Linda, Valerie Power, Adam De Eyto, and Leonard W. O’Sullivan. 2018. "Technology Acceptance and User-Centred Design of Assistive Exoskeletons for Older Adults: A Commentary" Robotics 7, no. 1: 3. https://doi.org/10.3390/robotics7010003
APA StyleShore, L., Power, V., De Eyto, A., & O’Sullivan, L. W. (2018). Technology Acceptance and User-Centred Design of Assistive Exoskeletons for Older Adults: A Commentary. Robotics, 7(1), 3. https://doi.org/10.3390/robotics7010003