Bioenergy Based Power Sources for Mobile Autonomous Robots


Abstract
1. Introduction
2. Types of Autonomous Mobile Robots
- The development of robots’ recharging terminals and robot behavior algorithms that include searching of such terminals and planning its work in a periodic charging operation mode [24,25], finding correct charging time, fuel amount needed for each working cycle, correct behavior strategy for robot depend of power source characteristics and requires theoretical research and modeling [26]. Optimal working cycles with refueling or recharging, searching for energy sources was investigated by D. Mcfarland [27].
- The use of complex power systems consisting of multiple power sources of different kinds [28,29]. This approach was implemented in Gastrobot [9] and Ecobot robot series [30], where microbial fuel cells (MFC) were used alongside with batteries and ultracapacitors. The distribution of energy between various power sources requires adaptive control and prediction of power consumption. Such energy distribution system based on a neural network model was proposed in [31] for robots with proton exchange membrane (PEM) fuel cell and a bank of ultracapacitors as power sources.
- With a lack of power for control systems, robot can switch to sleep mode with low power consumption. This approach was implemented in Ecobot robots [30]. The practical implementation of this mechanism can be based on using (along with the main control system) a secondary or back-up control system with reduced power consumption and computation power. As an example of similar architecture, the research robot-hexapod in study [32] can be introduced, although it has been created for other purposes. One computer was used for processing the sensor data and the other for direct servomotors’ control;
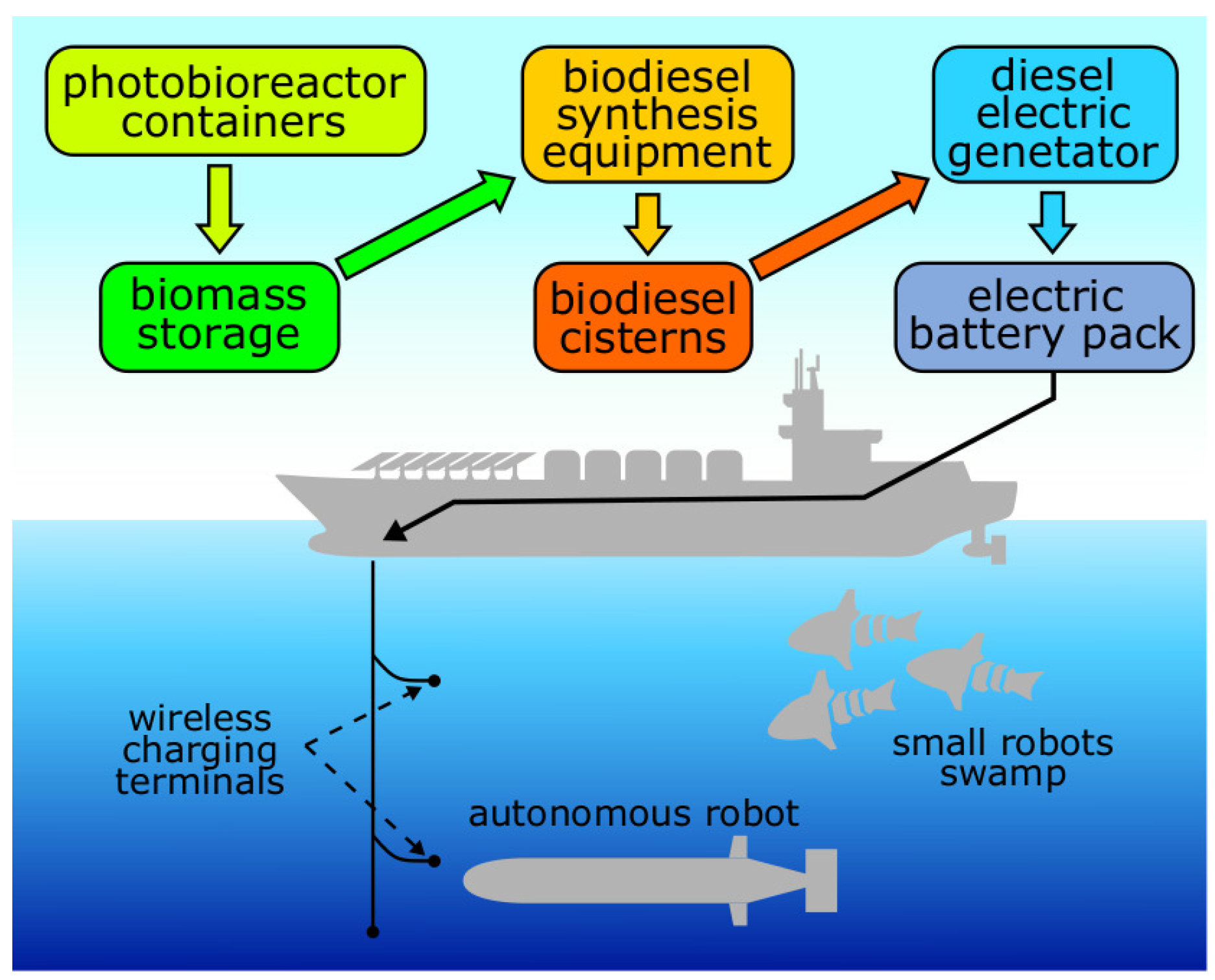
- The use of heterogeneous systems, for example, a large robot for transporting smaller robots, which are able to solve local tasks but have a lower energy autonomy [35];
- Effective use of the environment properties. For example, flying amphibian robots’ multicopters and planes can be applied for motion in two environments [36]. Energy demanding flight and periodic ground motion can be combined for surface locomotion [37,38]. The combination of the water and surface environments’ motion under certain local conditions can extend the range of applications and decrease power consumption. Examples of such solutions are underwater and supermarine legged amphibian robots [39,40]. Additionally, in the same environment but with different properties, robots can change movement type like the rolling/crawling robot Scorpio developed by Masataka et al. [41] and mimicking spider Cebrenus Rechenburgi movement strategy.
3. Biofuels for Combustion Engines
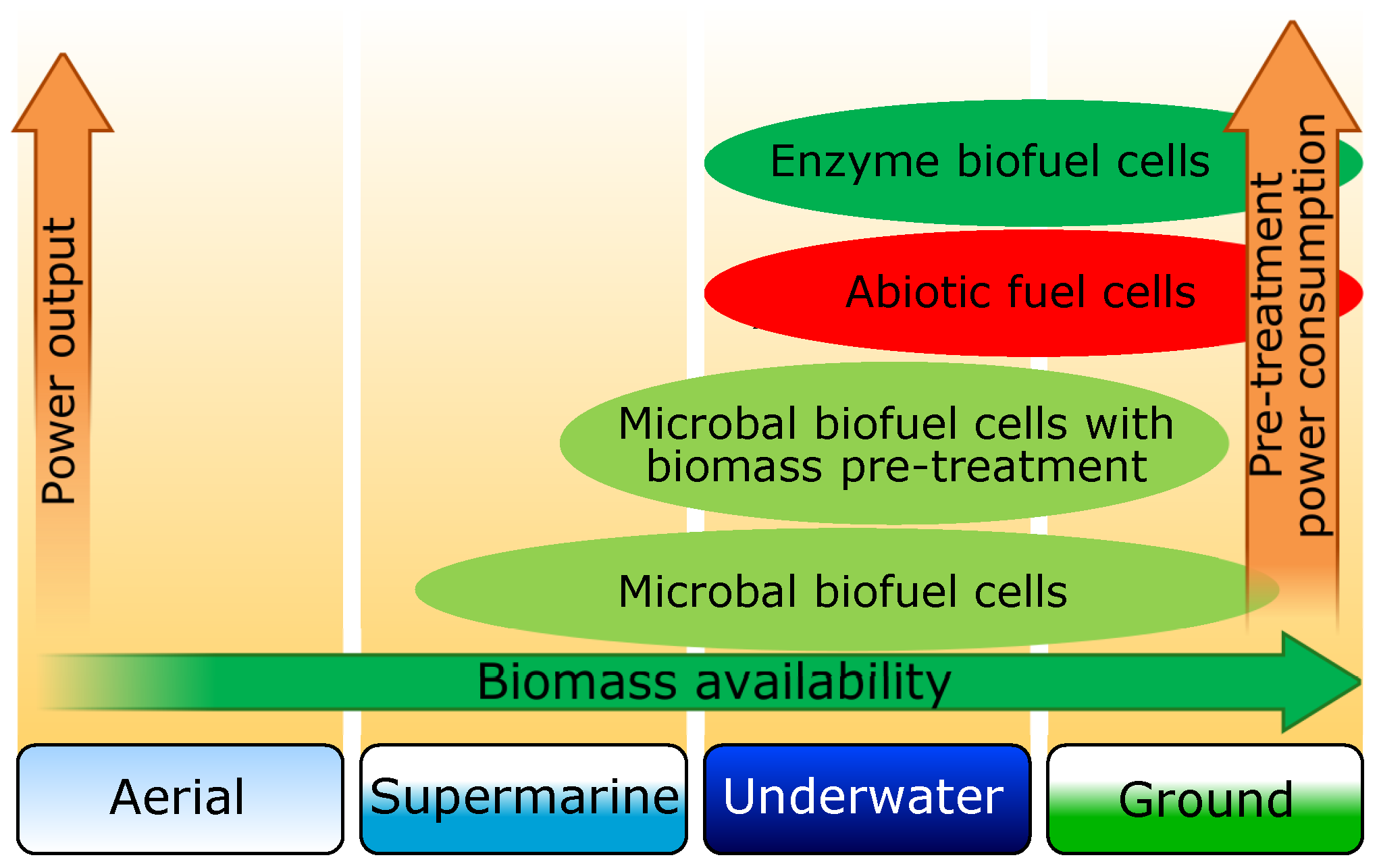
4. Biofuel Cells
- treatment of contaminated wastewater with organic impurities, such as sewage wastewater, with power production [73];
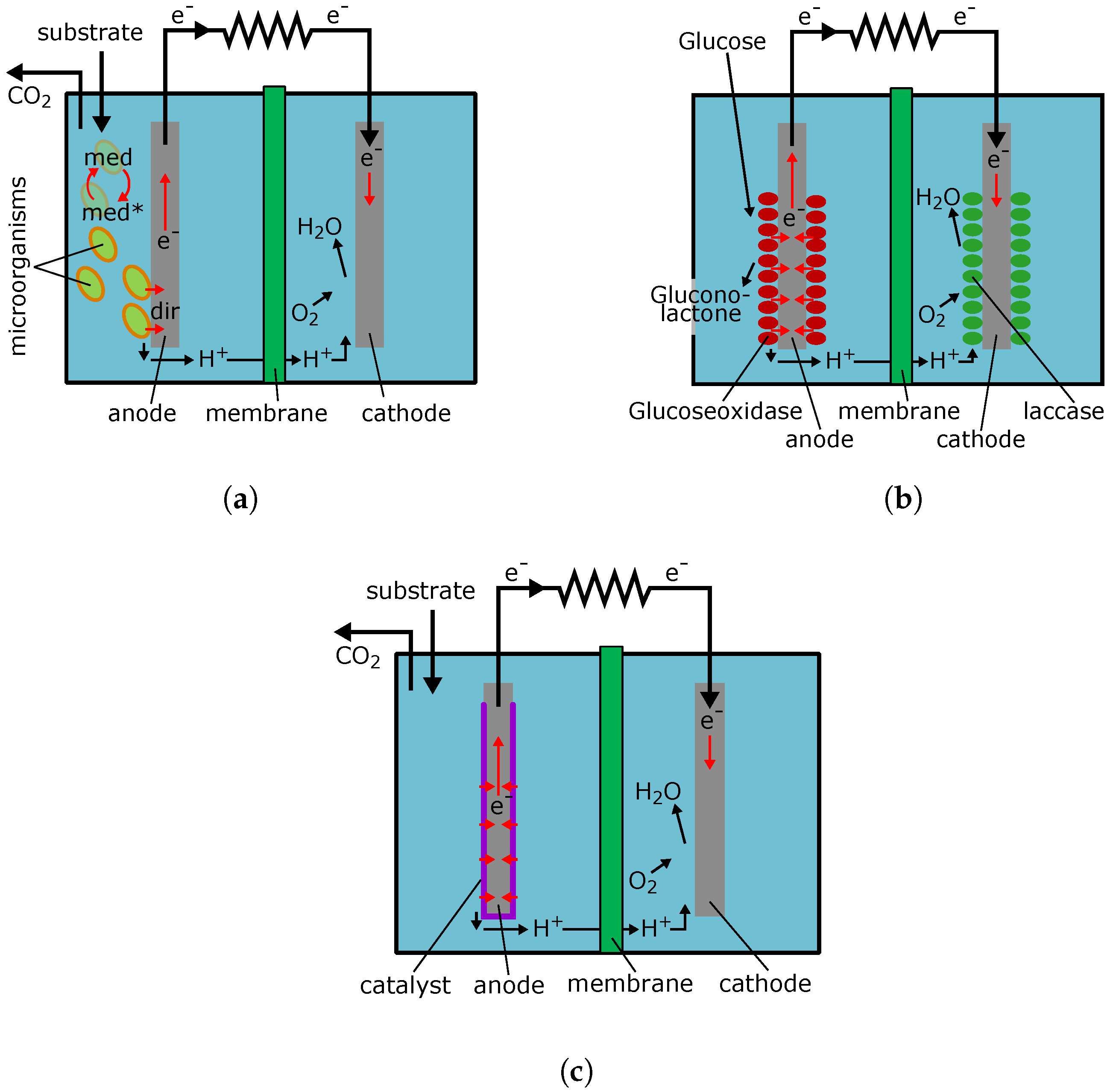
4.1. MFC
- BFC using microbial communities [73];
4.2. Enzyme BFC
4.3. Fuel Cells with Abiotic Catalyst for Use with Biological Fluids
- Development of substrate pretreatment system with such individual needs that can make the total net generation exceed MFC working with the same substrate without pretreatment; in addition, it must conform to the weight and size requirements of the robot that it is designed for. Possible designs of such systems will be reviewed in the section of the article dedicated to the biomass fermentation;
- Ensurement of long-term stability of enzymes on the electrode, especially when BFC is deactivated. The problem solving may require chambers with buffer solutions have a negative impact on the robot weight;
- Search for inexpensive highly conductive materials with high-surface area for electrode, as currently the maximum power is achieved by using expensive and rare materials;
- Exploration of the possibility of using thermophilic microorganisms’ enzymes, that will allow for raising the temperature to about 50–60 °C and thereby increase the rate of reaction.
- Search of new electrode materials is also essential, but it should be noted that BFC power output is limited both by physiology of microorganisms and their electron transport systems [95]. The value presented in Table 1 is considered today as closest to the theoretically achievable [16,95]. Therefore, a high-surface area should become the main aspect in the search and development of new materials.
- Using the thermophilic microorganisms or their communities can also theoretically increase the power of MFC, but this issue requires further study.
- As in the case of enzyme BFC, it is necessary to develop a substrate pretreatment system with such individual needs that can make the total net generation exceed MFC working with feedstock; in addition it must conform to the weight and size requirements of the robot which it is designed for. However, FC with abiotic catalyst will be less substrate specific than the enzyme one. In theory, it will allow for creating a simpler and less energy-intensive system.
- Today, the most common catalysts are platinum group metals. This is why searching for less expensive catalysts is very important.
- This type of FC is much less limited by temperature. Thus, for technical applications, the temperature and pressure of the substrate can be raised and thus the reaction rate and the FC power will increase correspondently.
- The crucial role in the efficiency and operation stability of specified FC types play the supply of substrate to the catalyst and removal of reaction products [106,107]. As it was shown in [31], optimization of the cell design and its hydraulic control potentially can offer some power increase and lead to a reduction of its weight and size characteristics;
5. Plant Biomass Fermentation
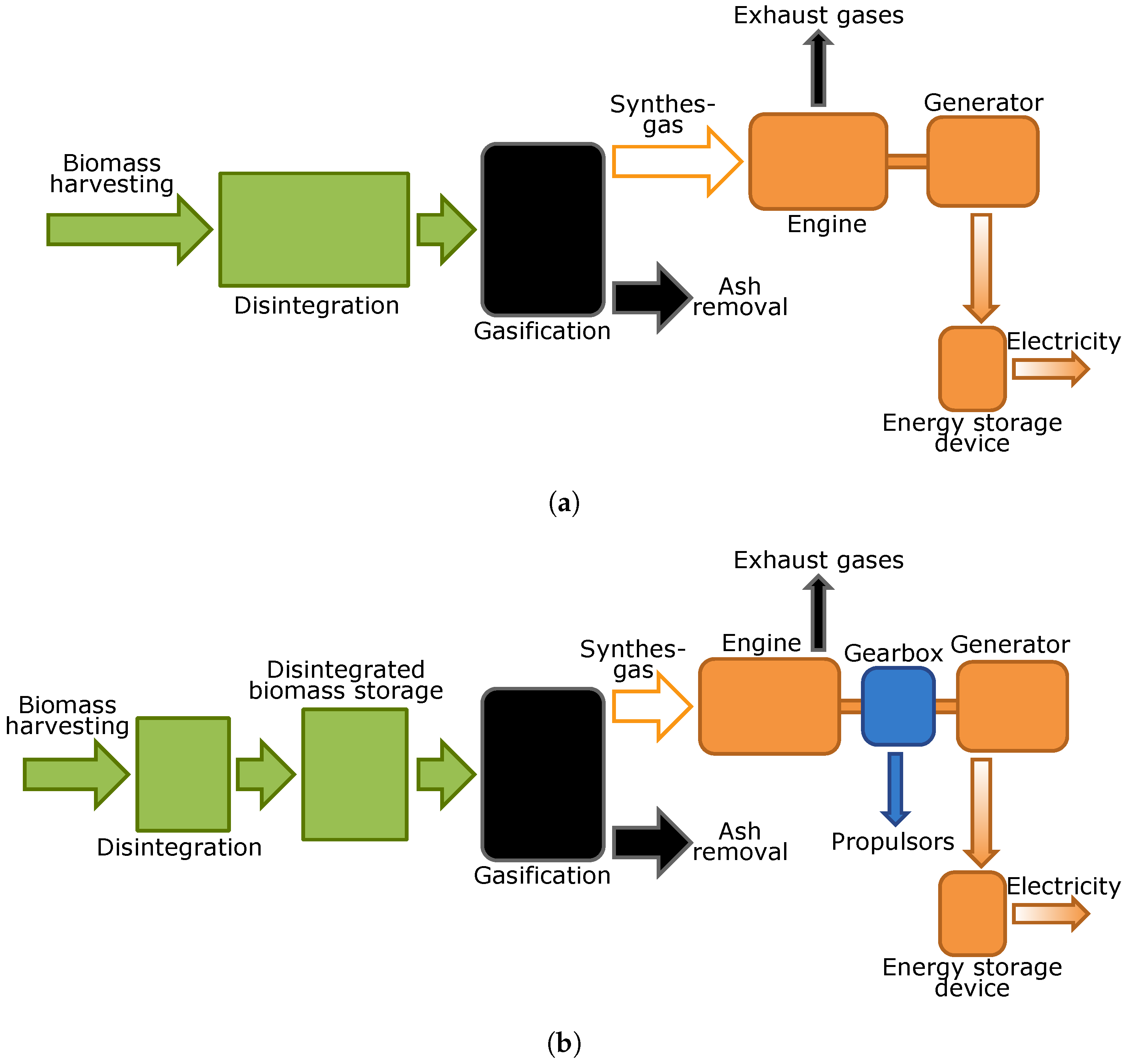
6. The Pyrolysis and Gasification of Biomass
- Both technologies are well proven and now it is possible to create a system using a gasifier with a loaded weight about 10–30 kg;
- Possibility of using almost all sufficiently dried higher plants.
- The complex and multi-component system, with plenty of power transmissions, especially in biomass disintegration part;
- Initial biomass humidity limitations [121]. Wet biomass requires drying and, as a result, additional systems with extra energy consumption are needed, which finally increase robot weight;
- This system produces waste in ash and exhaust gases.
7. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PEM | proton exchange membrane |
| MFC | microbal fuel cell |
| BFC | biofuel cell |
| FC | fuel cell |
| ISO | International Organization for Standardization |
References
- Asada, M.; Hosoda, K.; Kuniyoshi, Y.; Ishiguro, H.; Inui, T.; Yoshikawa, Y.; Ogino, M.; Yoshida, C. Cognitive developmental robotics: A survey. IEEE Trans. Auton. Ment. Dev. 2009, 1, 12–34. [Google Scholar] [CrossRef]
- Jiang, M.; Zhang, L. Big Data Analytics as a Service for Affective Humanoid Service Robots. Procedia Comput. Sci. 2015, 53, 141–148. [Google Scholar] [CrossRef]
- Asada, M.; MacDorman, K.F.; Ishiguro, H.; Kuniyoshi, Y. Cognitive developmental robotics as a new paradigm for the design of humanoid robots. Robot. Auton. Syst. 2001, 37, 185–193. [Google Scholar] [CrossRef]
- Nguyen, Q.V.; Park, H.C.; Goo, N.S.; Byun, D. Characteristics of a beetle’s free flight and a flapping-wing system that mimics beetle flight. J. Bionic Eng. 2010, 7, 77–86. [Google Scholar] [CrossRef]
- Rahman, M.M.; Sugimori, S.; Miki, H.; Yamamoto, R.; Sanada, Y.; Toda, Y. Braking performance of a biomimetic squid-like underwater robot. J. Bionic Eng. 2013, 10, 265–273. [Google Scholar] [CrossRef]
- Gancet, J.; Urbina, D.; Letier, P.; Ilzokvitz, M.; Weiss, P.; Gauch, F.; Antonelli, G.; Indiveri, G.; Casalino, G.; Birk, A.; et al. DexROV: Dexterous undersea inspection and maintenance in presence of communication latencies. IFAC-PapersOnLine 2015, 48, 218–223. [Google Scholar] [CrossRef]
- Puskaric, M.; Kukushkin, I.; Haskovic, D. Power supply concept for mobile robots in bionic assembly system. Procedia Eng. 2014, 69, 861–870. [Google Scholar] [CrossRef]
- Kaisare, N.S.; Vlachos, D.G. A review on microcombustion: Fundamentals, devices and applications. Prog. Energy Combust. Sci. 2012, 38, 321–359. [Google Scholar] [CrossRef]
- Wilkinson, S. “Gastrobots”—Benefits and challenges of microbial fuel cells in foodpowered robot applications. Auton. Robots 2000, 9, 99–111. [Google Scholar] [CrossRef]
- Philamore, H.; Rossiter, J.; Stinchcombe, A.; Ieropoulos, I. Row-bot: An energetically autonomous artificial water boatman. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3888–3893. [Google Scholar]
- Melhuish, C.; Ieropoulos, I.; Greenman, J.; Horsfield, I. Energetically autonomous robots: Food for thought. Auton. Robots 2006, 21, 187–198. [Google Scholar] [CrossRef]
- Ju, Y.; Maruta, K. Microscale combustion: Technology development and fundamental research. Prog. Energy Combust. Sci. 2011, 37, 669–715. [Google Scholar] [CrossRef]
- Lee, O.K.; Seong, D.H.; Lee, C.G.; Lee, E.Y. Sustainable production of liquid biofuels from renewable microalgae biomass. J. Ind. Eng. Chem. 2015, 29, 24–31. [Google Scholar] [CrossRef]
- Blakey, S.; Rye, L.; Wilson, C.W. Aviation gas turbine alternative fuels: A review. Proc. Combust. Inst. 2011, 33, 2863–2885. [Google Scholar] [CrossRef]
- Cosnier, S.; Goff, A.L.; Holzinger, M. Towards glucose biofuel cells implanted in human body for powering artificial organs: Review. Electrochem. Commun. 2014, 38, 19–23. [Google Scholar] [CrossRef]
- Rosenbaum, M.A.; Franks, A.E. Microbial catalysis in bioelectrochemical technologies: Status quo, challenges and perspectives. Appl. Microbiol. Biotechnol. 2014, 98, 509–518. [Google Scholar] [CrossRef] [PubMed]
- Sørensen, C.; Jørgensen, R.; Maagaard, J.; Bertelsen, K.; Dalgaard, L.; Norremark, M. Conceptual and user-centric design guidelines for a plant nursing robot. Biosyst. Eng. 2010, 105, 119–129. [Google Scholar] [CrossRef]
- Shukla, A.; Karki, H. Application of robotics in onshore oil and gas industry—A review Part I. Robot. Auton. Syst. 2016, 75, 490–507. [Google Scholar] [CrossRef]
- Rivas, E.; Mitobe, K. Development of the intake system for the SnowEater robot. Mechatronics 2015, 28, 27–34. [Google Scholar] [CrossRef]
- Nishida, Y.; Ura, T.; Hamatsu, T.; Nagahashi, K.; Inaba, S.; Nakatani, T. Resource investigation for Kichiji rockfish by autonomous underwater vehicle in Kitami-Yamato bank off Northern Japan. ROBOMECH J. 2014, 1, 2. [Google Scholar] [CrossRef]
- López, J.; Pérez, D.; Paz, E.; Santana, A. WatchBot: A building maintenance and surveillance system based on autonomous robots. Robot. Auton. Syst. 2013, 61, 1559–1571. [Google Scholar] [CrossRef]
- Molfino, R.M.; Razzoli, R.P.; Zoppi, M. Autonomous drilling robot for landslide monitoring and consolidation. Autom. Constr. 2008, 17, 111–121. [Google Scholar] [CrossRef]
- Brooks, R.A. From earwigs to humans. Robot. Auton. Syst. 1997, 20, 291–304. [Google Scholar] [CrossRef]
- Han, J.; Asada, A.; Ura, T.; Yamauchi, Y.; Yagita, Y.; Maki, T. Noncontact power supply for seafloor geodetic observing robot system. J. Mar. Sci. Technol. 2007, 12, 183–189. [Google Scholar] [CrossRef]
- Mintchev, S.; Ranzani, R.; Fabiani, F.; Stefanini, C. Towards docking for small scale underwater robots. Auton. Robots 2015, 38, 283–299. [Google Scholar] [CrossRef]
- Wawerla, J.; Vaughan, R.T. Optimal robot recharging strategies for time discounted labour. In Artificial Life XI; The MIT Press: Cambridge, MA, USA, 2008; pp. 670–677. [Google Scholar]
- McFarland, D.; Spier, E. Basic cycles, utility and opportunism in self-sufficient robots. Robot. Auton. Syst. 1997, 20, 179–190. [Google Scholar] [CrossRef]
- Joh, H.I.; Ha, T.J.; Hwang, S.Y.; Kim, J.H.; Chae, S.H.; Cho, J.H.; Prabhuram, J.; Kim, S.K.; Lim, T.H.; Cho, B.K.; et al. A direct methanol fuel cell system to power a humanoid robot. J. Power Sources 2010, 195, 293–298. [Google Scholar] [CrossRef]
- Kumar, R.; Baghel, O.; Sidar, S.K.; Sen, P.K.; Bohidar, S.K. Energy supply system in robotics machines. Int. J. Innov. Res. Sci. Technol. 2014, 1, 219–226. [Google Scholar]
- Ieropoulos, I.; Greenman, J.; Melhuish, C.; Horsfield, I. EcoBot-III: A robot with guts. In Artificial Life X: Proceedings of the Twelfth International Conference on the Synthesis and Simulation of Living Systems; The MIT Press: Cambridge, MA, USA, 2010; pp. 733–740. [Google Scholar]
- Chen, Q.; Long, R.; Quan, S.; Zhang, L. Nonlinear recurrent neural network predictive control for energy distribution of a fuel cell powered robot. Sci. World J. 2014, 2014, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Galloway, K.C.; Haynes, G.C.; Ilhan, B.D.; Johnson, A.M.; Knopf, R.; Lynch, G.A.; Plotnick, B.N.; White, M.; Koditschek, D.E. X-RHex: A Highly Mobile Hexapedal Robot for Sensorimotor Tasks; Technical Report; Department of Electrical and Systems Engineering, University of Pennsylvania: Philadelphia, PA, USA, 2010. [Google Scholar]
- Gonzalez-Rodriguez, A.G.; Gonzalez-Rodriguez, A.; Castillo-Garcia, F. Improving the energy efficiency and speed of walking robots. Mechatronics 2014, 24, 476–488. [Google Scholar] [CrossRef]
- Anderson, J.M.; Chhabra, N.K. Maneuvering and stability performance of a robotic tuna. Integr. Comp. Biol. 2002, 42, 118–126. [Google Scholar] [CrossRef] [PubMed]
- Guo, S.; Mao, S.; Shi, L.; Li, M. Development of an amphibious mother spherical robot used as the carrier for underwater microrobots. In Proceedings of the 2012 ICME International Conference on Complex Medical Engineering (CME), Kobe, Japan, 1–4 July 2012; pp. 758–762. [Google Scholar]
- Xiang, X.; Hu, T.; Zhou, H.; Ma, Z. Evaluating the fin-ray trajectory tracking of bio-inspired robotic undulating fins via an experimental-numerical approach. Int. J. Adv. Robot. Syst. 2014, 11, 98. [Google Scholar] [CrossRef]
- Peterson, K.; Fearing, R.S. Experimental dynamics of wing assisted running for a bipedal ornithopter. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5080–5086. [Google Scholar]
- Daler, L.; Mintchev, S.; Stefanini, C.; Floreano, D. A bioinspired multi-modal flying and walking robot. Bioinspir. Biomim. 2015, 10, 016005. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Yu, J.; Zhang, A.; Zhang, F. Spiraling motion of underwater gliders: Modeling, analysis, and experimental results. Ocean Eng. 2013, 60, 1–13. [Google Scholar] [CrossRef]
- Li, M.; Guo, S.; Hirata, H.; Ishihara, H. Design and performance evaluation of an amphibious spherical robot. Robot. Auton. Syst. 2015, 64, 21–34. [Google Scholar] [CrossRef]
- Masataka, F.; Mohan, R.E.; Tan, N.; Nakamura, A.; Pathmakumar, T. Terrain perception in a shape shifting rolling—Crawling robot. Robotics 2016, 5, 19. [Google Scholar] [CrossRef]
- Gomáriz, S.; Masmitjà, I.; González, J.; Masmitjà, G.; Prat, J. GUANAY-II: An autonomous underwater vehicle for vertical/horizontal sampling. J. Mar. Sci. Technol. 2015, 20, 81–93. [Google Scholar] [CrossRef]
- Zhao, Y.; Fukuhara, M.; Usami, T.; Takada, Y. Performance of very small robotic fish equipped with CMOS camera. Robotics 2015, 4, 421–434. [Google Scholar] [CrossRef]
- Schjlberg, I.; Utne, I. Towards autonomy in ROV operations. IFAC-PapersOnLine 2015, 48, 183–188. [Google Scholar] [CrossRef]
- Grimstad, L.; From, P.J. The Thorvald II agricultural robotic system. Robotics 2017, 6, 24. [Google Scholar] [CrossRef]
- Pêtrès, C.; Romero-Ramirez, M.A.; Plumet, F. A potential field approach for reactive navigation of autonomous sailboats. Robot. Auton. Syst. 2012, 60, 1520–1527. [Google Scholar]
- Santos, D.; Silva Junior, A.G.; Negreiros, A.; Vilas Boas, J.; Alvarez, J.; Araujo, A.; Aroca, R.V.; Goncalves, L.M.G. Design and implementation of a control system for a sailboat robot. Robotics 2016, 5, 5. [Google Scholar] [CrossRef]
- Jurdak, R.; Elfes, A.; Kusy, B.; Tews, A.; Hu, W.; Hernandez, E.; Kottege, N.; Sikka, P. Autonomous surveillance for biosecurity. Trends Biotechnol. 2015, 33, 201–207. [Google Scholar] [CrossRef] [PubMed]
- Ákos, Z.; Nagy, M.; Leven, S.; Vicsek, T. Thermal soaring flight of birds and unmanned aerial vehicles. Bioinspir. Biomim. 2010, 5, 045003. [Google Scholar]
- Jin, B.; Chen, C.; Li, W. Power consumption optimization for a hexapod walking robot. J. Intell. Robot. Syst. 2013, 71, 195–209. [Google Scholar] [CrossRef]
- Liu, J.; Hu, H. Biological inspiration: From carangiform fish to multi-joint robotic fish. J. Bionic Eng. 2010, 7, 35–48. [Google Scholar] [CrossRef]
- Dileo, C.; Deng, X. Design of and experiments on a dragonfly-inspired robot. Adv. Robot. 2009, 23, 1003–1021. [Google Scholar] [CrossRef]
- Liu, H.; Nakata, T.; Gao, N.; Maeda, M.; Aono, H.; Shyy, W. Micro air vehicle-motivated computational biomechanics in bio-flights: Aerodynamics, flight dynamics and maneuvering stability. Acta Mech. Sin. 2010, 26, 863–879. [Google Scholar] [CrossRef]
- Zhang, Y.; He, J.; Low, K. Parametric study of an underwater finned propulsor inspired by bluespotted ray. J. Bionic Eng. 2012, 9, 166–176. [Google Scholar] [CrossRef]
- Shao, J.; Wang, L.; Yu, J. Development of an artificial fish-like robot and its application in cooperative transportation. Control Eng. Pract. 2008, 16, 569–584. [Google Scholar] [CrossRef]
- Wang, T.; Wen, L.; Liang, J.; Wu, G. Fuzzy vorticity control of a biomimetic robotic fish using a flapping lunate tail. J. Bionic Eng. 2010, 7, 56–65. [Google Scholar] [CrossRef]
- Yuzbasheva, E.Y.; Gotovtsev, P.M.; Mostova, E.B.; Perkovskaya, N.I.; Lomonosova, M.A.; Butylin, V.V.; Sineokii, S.P.; Vasilov, R.G. Biodiesel production via enzymatic catalysis. Appl. Biochem. Microbiol. 2014, 50, 737–749. [Google Scholar] [CrossRef]
- Chiaramonti, D.; Prussi, M.; Buffi, M.; Tacconi, D. Sustainable bio kerosene: Process routes and industrial demonstration activities in aviation biofuels. Appl. Energy 2014, 136, 767–774. [Google Scholar] [CrossRef]
- Bennion, E.P.; Ginosar, D.M.; Moses, J.; Agblevor, F.; Quinn, J.C. Lifecycle assessment of microalgae to biofuel: Comparison of thermochemical processing pathways. Appl. Energy 2015, 154, 1062–1071. [Google Scholar] [CrossRef]
- Zhang, Y.H.P. Production of biofuels and biochemicals by in vitro synthetic biosystems: Opportunities and challenges. Biotechnol. Adv. 2015, 33, 1467–1483. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.K. Microalgal mass culture systems and methods: Their limitation and potential. J. Appl. Phycol. 2001, 13, 307–315. [Google Scholar] [CrossRef]
- Vandamme, D.; Foubert, I.; Muylaert, K. Flocculation as a low-cost method for harvesting microalgae for bulk biomass production. Trends Biotechnol. 2013, 31, 233–239. [Google Scholar] [CrossRef] [PubMed]
- Gorin, K.V.; Sergeeva, Y.E.; Butylin, V.V.; Komova, A.V.; Pojidaev, V.M.; Badranova, G.U.; Shapovalova, A.A.; Konova, I.A.; Gotovtsev, P.M. Methods coagulation/flocculation and flocculation with ballast agent for effective harvesting of microalgae. Bioresour. Technol. 2015, 193, 178–184. [Google Scholar] [CrossRef] [PubMed]
- Uduman, N.; Qi, Y.; Danquah, M.K.; Forde, G.M.; Hoadley, A. Dewatering of microalgal cultures: A major bottleneck to algae-based fuels. J. Renew. Sustain. Energy 2010, 2, 012701. [Google Scholar] [CrossRef]
- Pruvost, J.; Gouic, B.L.; Lepine, O.; Legrand, J.; Borgne, F.L. Microalgae culture in building-integrated photobioreactors: Biomass production modelling and energetic analysis. Chem. Eng. J. 2016, 284, 850–861. [Google Scholar] [CrossRef]
- De Andrade, G.; Berenguel, M.; Guzman, J.; Pagano, D.; Acien, F. Optimization of biomass production in outdoor tubular photobioreactors. J. Process Control 2016, 37, 58–69. [Google Scholar] [CrossRef]
- Zhao, B.; Su, Y.; Zhang, Y.; Cui, G. Carbon dioxide fixation and biomass production from combustion flue gas using energy microalgae. Energy 2015, 89, 347–357. [Google Scholar] [CrossRef]
- Shukla, A.K.; Suresh, P.; Berchmans, S.; Rajendran, A. Biological fuel cells and their applications. Curr. Sci. 2004, 87, 455–468. [Google Scholar]
- Rousseau, R.; Rimboud, M.; Delia, M.L.; Bergel, A.; Basseguy, R. Electrochemical characterization of microbial bioanodes formed on a collector/electrode system in a highly saline electrolyte. Bioelectrochemistry 2015, 106, 97–104. [Google Scholar] [CrossRef] [PubMed]
- Reshetilov, A.N. Biosensors and biofuel cells: Research focused on practical application (Review). Appl. Biochem. Microbiol. 2015, 51, 264–269. [Google Scholar] [CrossRef]
- Alferov, S.V.; Minaicheva, P.R.; Arlyapov, V.A.; Asulyan, L.D.; Alferov, V.A.; Ponamoreva, O.N.; Reshetilov, A.N. Bioanode for a microbial fuel cell based on Gluconobacter oxydans immobilized into a polymer matrix. Appl. Biochem. Microbiol. 2014, 50, 637–643. [Google Scholar] [CrossRef]
- Bretschger, O.; Osterstock, J.B.; Pinchak, W.E.; Ishii, S.; Nelson, K.E. Microbial fuel cells and microbial ecology: Applications in ruminant health and production research. Microb. Ecol. 2010, 59, 415–427. [Google Scholar] [CrossRef] [PubMed]
- Commault, A.S.; Lear, G.; Weld, R.J. Maintenance of Geobacter-dominated biofilms in microbial fuel cells treating synthetic wastewater. Bioelectrochemistry 2015, 106, 150–158. [Google Scholar] [CrossRef] [PubMed]
- Falk, M.; Andoralov, V.; Silow, M.; Toscano, M.D.; Shleev, S. Miniature biofuel cell as a potential power source for glucose-sensing contact lenses. Anal. Chem. 2013, 85, 6342–6348. [Google Scholar] [CrossRef] [PubMed]
- Rapoport, B.I.; Kedzierski, J.T.; Sarpeshkar, R. A glucose fuel cell for implantable brain-machine interfaces. PLoS ONE 2012, 7, e38436. [Google Scholar] [CrossRef] [PubMed]
- Reshetilov, A.N.; Kitova, A.E.; Dyakov, A.V.; Gotovtsev, P.M.; Vasilov, R.G.; Gutorov, M.A. Converter-based accumulation of electric energy generated by microbial biofuel cell. IOP Conf. Ser. Earth Environ. Sci. 2017, 52, 012010. [Google Scholar] [CrossRef]
- Korth, B.; Rosa, L.F.; Harnisch, F.; Picioreanu, C. A framework for modeling electroactive microbial biofilms performing direct electron transfer. Bioelectrochemistry 2015, 106, 194–206. [Google Scholar] [CrossRef] [PubMed]
- Du, Z.; Li, H.; Gu, T. A state of the art review on microbial fuel cells: A promising technology for wastewater treatment and bioenergy. Biotechnol. Adv. 2007, 25, 464–482. [Google Scholar] [CrossRef] [PubMed]
- Hubenova, Y.; Mitov, M. Extracellular electron transfer in yeast-based biofuel cells: A review. Bioelectrochemistry 2015, 106, 177–185. [Google Scholar] [CrossRef] [PubMed]
- Kaneshiro, H.; Takano, K.; Takada, Y.; Wakisaka, T.; Tachibana, T.; Azuma, M. A milliliter-scale yeast-based fuel cell with high performance. Biochem. Eng. J. 2014, 83, 90–96. [Google Scholar] [CrossRef]
- Strik, D.P.; Timmers, R.A.; Helder, M.; Steinbusch, K.J.; Hamelers, H.V.; Buisman, C.J. Microbial solar cells: Applying photosynthetic and electrochemically active organisms. Trends Biotechnol. 2011, 29, 41–49. [Google Scholar] [CrossRef] [PubMed]
- Bradley, R.W.; Bombelli, P.; Rowden, S.J.; Howe, C.J. Biological photovoltaics: Intra- and extra-cellular electron transport by cyanobacteria. Biochem. Soc. Trans. 2012, 40, 1302–1307. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.D.; Manikandavelu, D.; Kasirajan, K.G. Fixation of carbon dioxide and oxygen production by photosynthetic simulations in indoor environs. J. Algal Biomass Util. 2010, 1, 84–88. [Google Scholar]
- Gajda, I.; Greenman, J.; Melhuish, C.; Ieropoulos, I. Photosynthetic cathodes for Microbial Fuel Cells. Int. J. Hydrogen Energy 2013, 38, 11559–11564. [Google Scholar] [CrossRef]
- Choi, S. Microscale microbial fuel cells: Advances and challenges. Biosens. Bioelectron. 2015, 69, 8–25. [Google Scholar] [CrossRef] [PubMed]
- Bombelli, P.; Müller, T.; Herling, T.W.; Howe, C.J.; Knowles, T.P.J. A high power-density, mediator-free, microfluidic biophotovoltaic device for cyanobacterial cells. Adv. Energy Mater. 2015, 5, 1401299. [Google Scholar] [CrossRef] [PubMed]
- Lowy, D.A.; Tender, L.M.; Zeikus, J.G.; Park, D.H.; Lovley, D.R. Harvesting energy from the marine sediment-water interface II. Biosens. Bioelectron. 2006, 21, 2058–2063. [Google Scholar] [CrossRef] [PubMed]
- Pant, D.; Bogaert, G.V.; Diels, L.; Vanbroekhoven, K. A review of the substrates used in microbial fuel cells (MFCs) for sustainable energy production. Bioresour. Technol. 2010, 101, 1533–1543. [Google Scholar] [CrossRef] [PubMed]
- Velasquez-Orta, S.B.; Curtis, T.P.; Logan, B.E. Energy from algae using microbial fuel cells. Biotechnol. Bioeng. 2009, 103, 1068–1076. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Gannon, S.M.; Nevin, K.P.; Franks, A.E.; Lovley, D.R. Stimulating the anaerobic degradation of aromatic hydrocarbons in contaminated sediments by providing an electrode as the electron acceptor. Environ. Microbiol. 2010, 12, 1011–1020. [Google Scholar] [CrossRef] [PubMed]
- Kircheva, N.; Outin, J.; Perrier, G.; Ramousse, J.; Merlin, G.; Lyautey, E. Bio-electrochemical characterization of air-cathode microbial fuel cells with microporous polyethylene/silica membrane as separator. Bioelectrochemistry 2015, 106, 115–124. [Google Scholar] [CrossRef] [PubMed]
- Catal, T.; Li, K.; Bermek, H.; Liu, H. Electricity production from twelve monosaccharides using microbial fuel cells. J. Power Sources 2008, 175, 196–200. [Google Scholar] [CrossRef]
- Nevin, K.P.; Richter, H.; Covalla, S.F.; Johnson, J.P.; Woodard, T.L.; Orloff, A.L.; Jia, H.; Zhang, M.; Lovley, D.R. Power output and columbic efficiencies from biofilms of Geobacter sulfurreducens comparable to mixed community microbial fuel cells. Environ. Microbiol. 2008, 10, 2505–2514. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Lee, H.S.; Yang, Y.; Parameswaran, P.; Torres, C.I.; Rittmann, B.E.; Chae, J. A μL-scale micromachined microbial fuel cell having high power density. Lab Chip 2011, 11, 1110–1117. [Google Scholar] [CrossRef] [PubMed]
- Logan, B.E. Exoelectrogenic bacteria that power microbial fuel cells. Nat. Rev. Microbiol. 2009, 7, 375–381. [Google Scholar] [CrossRef] [PubMed]
- Kanwal, A.; Wang, S.C.; Ying, Y.; Cohen, R.; Lakshmanan, S.; Patlolla, A.; Iqbal, Z.; Thomas, G.A.; Farrow, R.C. Substantial power density from a discrete nano-scalable biofuel cell. Electrochem. Commun. 2014, 39, 37–40. [Google Scholar] [CrossRef]
- Sakai, H.; Nakagawa, T.; Tokita, Y.; Hatazawa, T.; Ikeda, T.; Tsujimura, S.; Kano, K. A high-power glucose/oxygen biofuel cell operating under quiescent conditions. Energy Environ. Sci. 2009, 2, 133–138. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Lu, W. Genome-scale reconstruction of a metabolic network for Gluconobacter oxydans 621H. Biosystems 2014, 117, 10–14. [Google Scholar] [CrossRef] [PubMed]
- Andoralov, V.; Falk, M.; Suyatin, D.B.; Granmo, M.; Sotres, J.; Ludwig, R.; Popov, V.O.; Schouenborg, J.; Blum, Z.; Shleev, S. Biofuel cell based on microscale nanostructured electrodes with inductive coupling to rat brain neurons. Sci. Rep. 2013, 3, 3270. [Google Scholar] [CrossRef] [PubMed]
- Zebda, A.; Cosnier, S.; Alcaraz, J.P.; Holzinger, M.; Le Goff, A.; Gondran, C.; Boucher, F.; Giroud, F.; Gorgy, K.; Lamraoui, H.; et al. Single glucose biofuel cells implanted in rats power electronic devices. Sci. Rep. 2013, 3, 1516. [Google Scholar] [CrossRef] [PubMed]
- Reuillard, B.; Abreu, C.; Lalaoui, N.; Goff, A.L.; Holzinger, M.; Ondel, O.; Buret, F.; Cosnier, S. One-year stability for a glucose/oxygen biofuel cell combined with pH reactivation of the laccase/carbon nanotube biocathode. Bioelectrochemistry 2015, 106, 73–76. [Google Scholar] [CrossRef] [PubMed]
- Milton, R.D.; Giroud, F.; Thumser, A.E.; Minteer, S.D.; Slade, R.C. Glucose oxidase progressively lowers bilirubin oxidase bioelectrocatalytic cathode performance in single-compartment glucose/oxygen biological fuel cells. Electrochim. Acta 2014, 140, 59–64. [Google Scholar] [CrossRef]
- Elouarzaki, K.; Haddad, R.; Holzinger, M.; Goff, A.L.; Thery, J.; Cosnier, S. MWCNT-supported phthalocyanine cobalt as air-breathing cathodic catalyst in glucose/O2 fuel cells. J. Power Sources 2014, 255, 24–28. [Google Scholar] [CrossRef]
- Elleuche, S.; Schäfers, C.; Blank, S.; Schröder, C.; Antranikian, G. Exploration of extremophiles for high temperature biotechnological processes. Curr. Opin. Microbiol. 2015, 25, 113–119. [Google Scholar] [CrossRef] [PubMed]
- Reshetilov, A.N.; Plekhanova, J.V.; Tarasov, S.E.; Bykov, A.G.; Gutorov, M.A.; Alferov, S.V.; Tenchurin, T.K.; Chvalun, S.N.; Orekhov, A.S.; Shepelev, A.D.; et al. Evaluation properties of bioelectrodes based on carbon superfine materials containing model microorganisms Gluconobacter. Nanotechnol. Russia 2017, 12, 107–115. [Google Scholar] [CrossRef]
- Do, T.; Varničić, M.; Hanke-Rauschenbach, R.; Vidaković-Koch, T.; Sundmacher, K. Mathematical modeling of a porous enzymatic electrode with direct electron transfer mechanism. Electrochim. Acta 2014, 137, 616–626. [Google Scholar] [CrossRef]
- Do, T.; Varničić, M.; Flassig, R.; Vidaković-Koch, T.; Sundmacher, K. Dynamic and steady state 1-D model of mediated electron transfer in a porous enzymatic electrode. Bioelectrochemistry 2015, 106, 3–13. [Google Scholar] [CrossRef] [PubMed]
- Fan, S.; Hou, C.; Liang, B.; Feng, R.; Liu, A. Microbial surface displayed enzymes based biofuel cell utilizing degradation products of lignocellulosic biomass for direct electrical energy. Bioresour. Technol. 2015, 192, 821–825. [Google Scholar] [CrossRef] [PubMed]
- Nanda, S.; Azargohar, R.; Dalai, A.K.; Kozinski, J.A. An assessment on the sustainability of lignocellulosic biomass for biorefining. Renew. Sustain. Energy Rev. 2015, 50, 925–941. [Google Scholar] [CrossRef]
- Garba, N.; Sa’adu, L.; Dambatta, M. An overview of the substrates used in microbial fuel cells. Greener J. Biochem. Biotechnol. 2017, 4, 7–26. [Google Scholar] [CrossRef]
- Pandey, P.; Shinde, V.N.; Deopurkar, R.L.; Kale, S.P.; Patil, S.A.; Pant, D. Recent advances in the use of different substrates in microbial fuel cells toward wastewater treatment and simultaneous energy recovery. Appl. Energy 2016, 168, 706–723. [Google Scholar] [CrossRef]
- Khare, S.K.; Pandey, A.; Larroche, C. Current perspectives in enzymatic saccharification of lignocellulosic biomass. Biochem. Eng. J. 2015, 102, 38–44. [Google Scholar] [CrossRef]
- Farinas, C.S. Developments in solid-state fermentation for the production of biomass-degrading enzymes for the bioenergy sector. Renew. Sustain. Energy Rev. 2015, 52, 179–188. [Google Scholar] [CrossRef]
- Maurelli, L.; Giovane, A.; Esposito, A.; Moracci, M.; Fiume, I.; Rossi, M.; Morana, A. Evidence that the xylanase activity from Sulfolobus solfataricus Oα is encoded by the endoglucanase precursor gene (sso1354) and characterization of the associated cellulase activity. Extremophiles 2008, 12, 689–700. [Google Scholar] [CrossRef] [PubMed]
- Cannio, R.; Di Prizito, N.; Rossi, M.; Morana, A. A xylan-degrading strain of Sulfolobus solfataricus: Isolation and characterization of the xylanase activity. Extremophiles 2004, 8, 117–124. [Google Scholar] [CrossRef] [PubMed]
- Bronnenmeier, K.; Kern, A.; Liebl, W.; Staudenbauer, W.L. Purification of thermotoga maritima enzymes for the degradation of cellulosic materials. Appl. Environ. Microbiol. 1995, 61, 1399–1407. [Google Scholar] [PubMed]
- Fedorov, M.V.; Kornyshev, A.A. Ionic liquids at electrified interfaces. Chem. Rev. 2014, 114, 2978–3036. [Google Scholar] [CrossRef] [PubMed]
- Socha, A.M.; Parthasarathi, R.; Shi, J.; Pattathil, S.; Whyte, D.; Bergeron, M.; George, A.; Tran, K.; Stavila, V.; Venkatachalam, S.; et al. Efficient biomass pretreatment using ionic liquids derived from lignin and hemicellulose. Proc. Natl. Acad. Sci. USA 2014, 111, E3587–E3595. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H. Methods for stabilizing and activating enzymes in ionic liquids—A review. J. Chem. Technol. Biotechnol. 2010, 85, 891–907. [Google Scholar] [CrossRef]
- Li, B.; Ou, L.; Dang, Q.; Meyer, P.; Jones, S.; Brown, R.; Wright, M. Techno-economic and uncertainty analysis of in situ and ex situ fast pyrolysis for biofuel production. Bioresour. Technol. 2015, 196, 49–56. [Google Scholar] [CrossRef] [PubMed]
- Pérez, J.F.; Benjumea, P.N.; Melgar, A. Sensitivity analysis of a biomass gasification model in fixed bed downdraft reactors: Effect of model and process parameters on reaction front. Biomass Bioenergy 2015, 83, 403–421. [Google Scholar] [CrossRef]
- Patra, T.K.; Sheth, P.N. Biomass gasification models for downdraft gasifier: A state-of-the-art review. Renew. Sustain. Energy Rev. 2015, 50, 583–593. [Google Scholar] [CrossRef]
- Abdoulmoumine, N.; Adhikari, S.; Kulkarni, A.; Chattanathan, S. A review on biomass gasification syngas cleanup. Appl. Energy 2015, 155, 294–307. [Google Scholar] [CrossRef]
- Shen, D.; Jin, W.; Hu, J.; Xiao, R.; Luo, K. An overview on fast pyrolysis of the main constituents in lignocellulosic biomass to valued-added chemicals: Structures, pathways and interactions. Renew. Sustain. Energy Rev. 2015, 51, 761–774. [Google Scholar] [CrossRef]
- Bauer, S.; Bauer-Gogonea, S.; Graz, I.; Kaltenbrunner, M.; Keplinger, C.; Schwodiauer, R. 25th anniversary article: A soft future: from robots and sensor skin to energy harvesters. Adv. Mater. 2014, 26, 149–162. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Enzyme BFC | MFC | FC with Abiotic Catalyst |
|---|---|---|---|
| Power density achieved by now | Up to 18 mW/cm2 [96] | Up to 0.19 mW/cm2 [16,78] | Up to 2.3 mW/cm2 [103] |
| Used substrates | The narrow substrate specificity. Most of the works are focused on aqueous solutions of glucose, less often—methanol in small concentrations. | The broad substrate specificity. The use of microbial communities significantly extends the range of natural substrates. | Potentially broad substrate specificity. However, today, we don’t have enough data on promising catalysts for this type of FC for various substrates. |
| Substrate pretreatment | Required | Minimal, and not necessary in some cases. However, it can give possibility to increase power. | Required, at least, for transformation of substrate to liquid homogenous state. |
| Time of stable operation | Up to 100 days in case of implantation into mouse [15] Up to 1 year in a medium with a physiological concentration of glucose [101] | Depends on structural components lifetime in case of microorganisms survival | Depends on lifetime of structural components |
| Operation temperature | Not above 37 °C | Not above 37 °C up to 60–70 °C if thermophilic microorganism is applied [104] | Limited with thermostability of the materials used |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gotovtsev, P.; Vorobiev, V.; Migalev, A.; Badranova, G.; Gorin, K.; Dyakov, A.; Reshetilov, A. Bioenergy Based Power Sources for Mobile Autonomous Robots. Robotics 2018, 7, 2. https://doi.org/10.3390/robotics7010002
Gotovtsev P, Vorobiev V, Migalev A, Badranova G, Gorin K, Dyakov A, Reshetilov A. Bioenergy Based Power Sources for Mobile Autonomous Robots. Robotics. 2018; 7(1):2. https://doi.org/10.3390/robotics7010002
Chicago/Turabian StyleGotovtsev, Pavel, Vitaly Vorobiev, Alexander Migalev, Gulfiya Badranova, Kirill Gorin, Andrey Dyakov, and Anatoly Reshetilov. 2018. "Bioenergy Based Power Sources for Mobile Autonomous Robots" Robotics 7, no. 1: 2. https://doi.org/10.3390/robotics7010002
APA StyleGotovtsev, P., Vorobiev, V., Migalev, A., Badranova, G., Gorin, K., Dyakov, A., & Reshetilov, A. (2018). Bioenergy Based Power Sources for Mobile Autonomous Robots. Robotics, 7(1), 2. https://doi.org/10.3390/robotics7010002