
Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
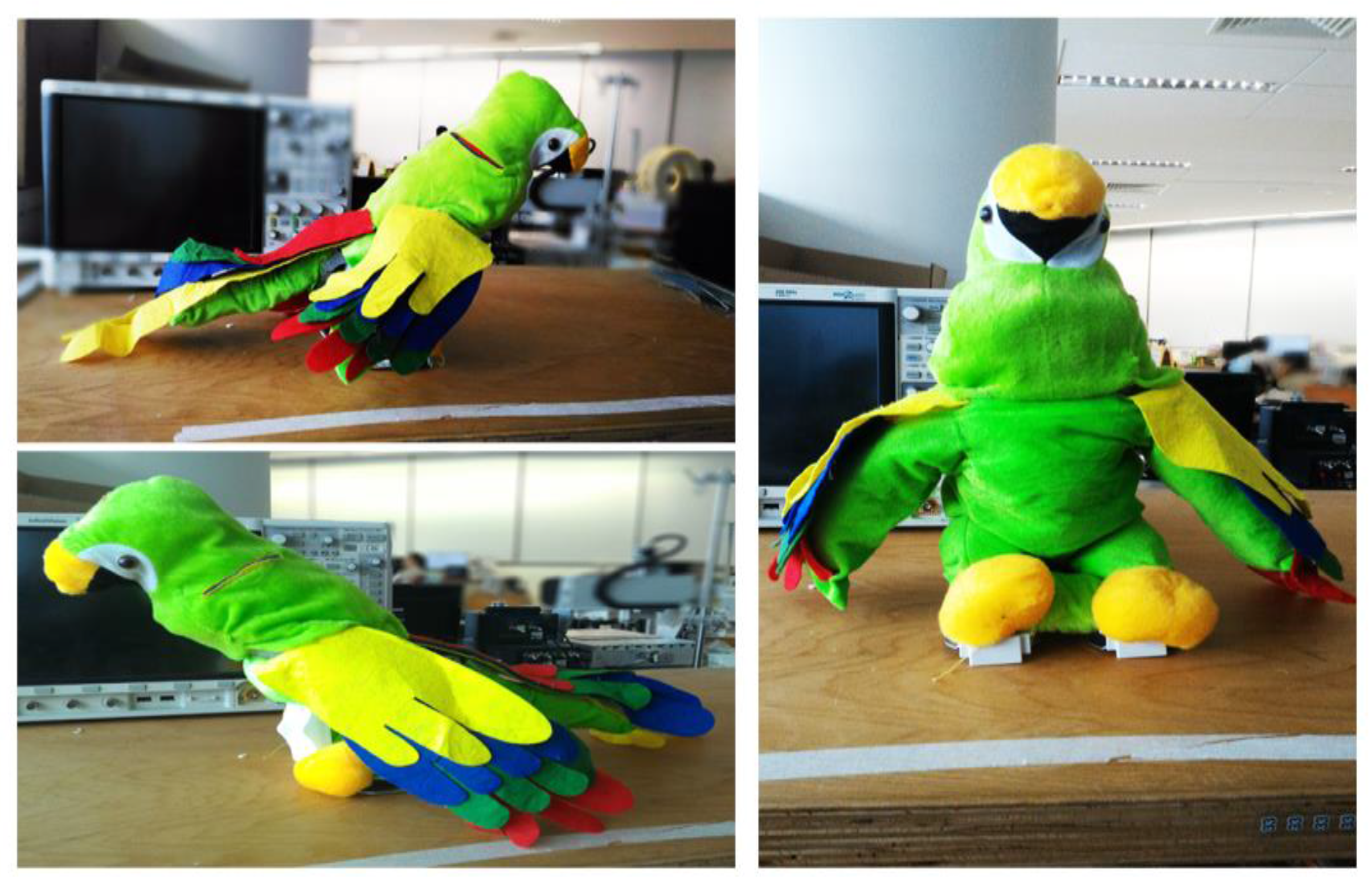
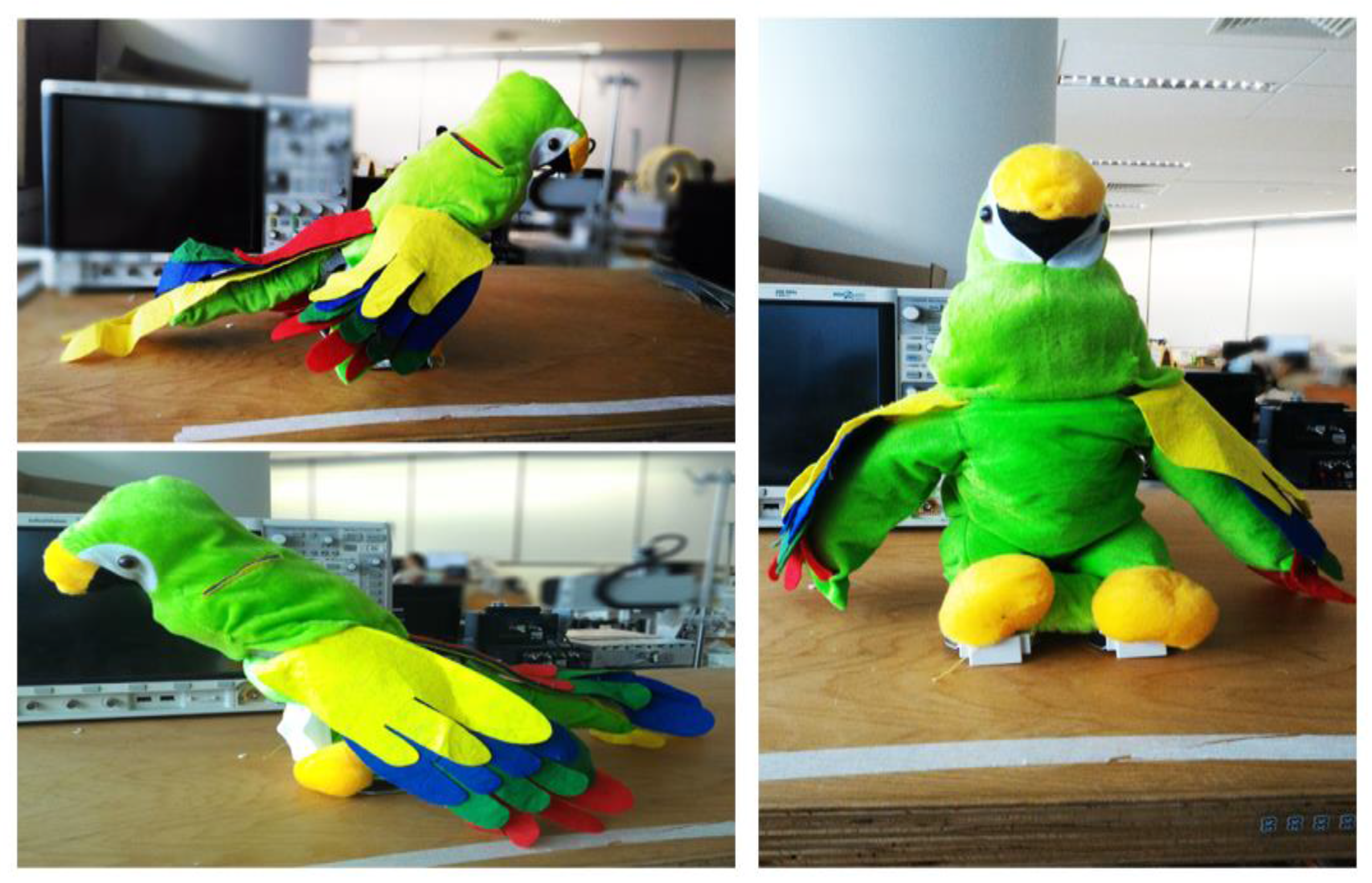
2.1. KiliRo–System Architecture
2.2. Procedure
- AMRM could help improve learning abilities of children with autism.
- AMRM could help improve social interaction abilities of children with autism.
- Parrot-like morphology might attract children with autism.
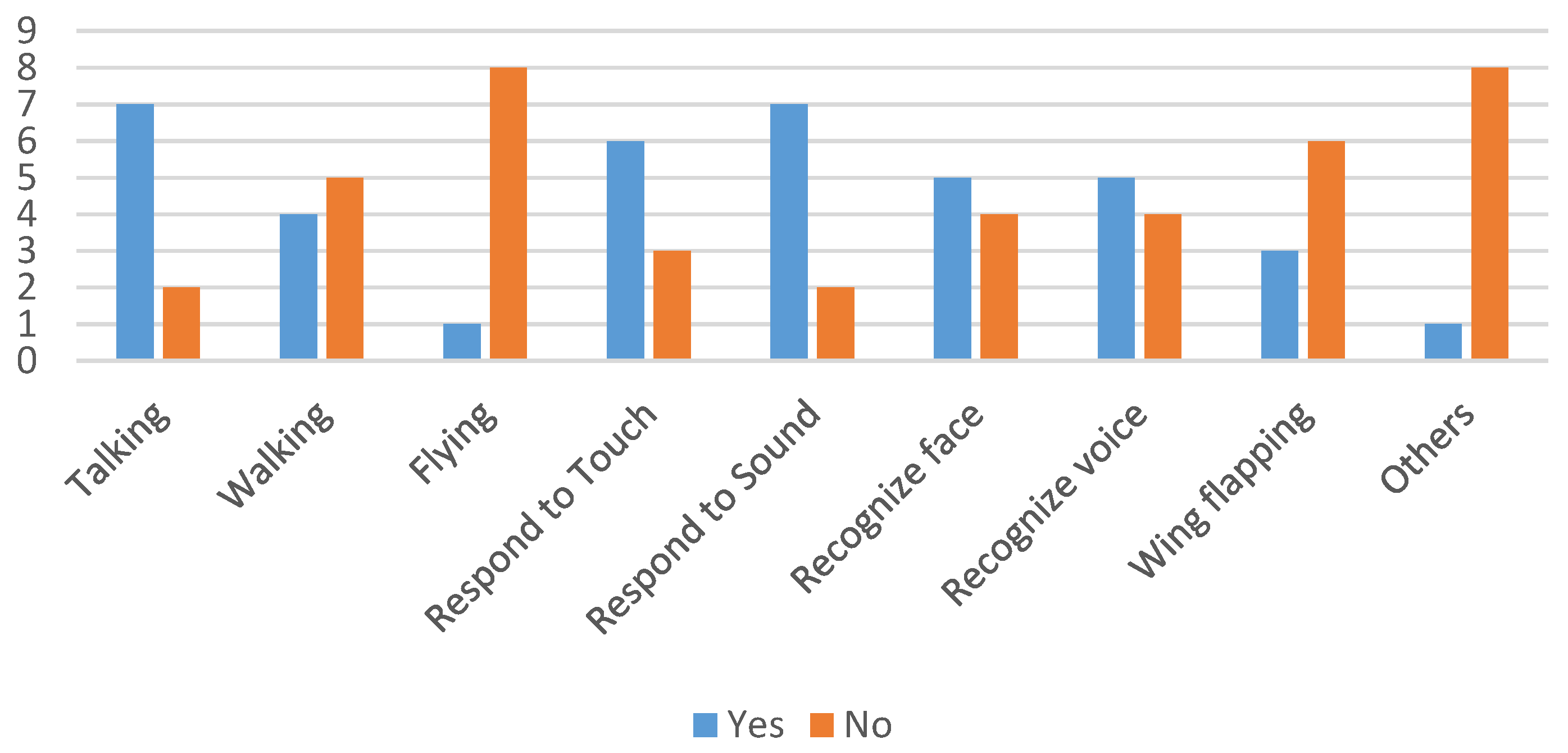
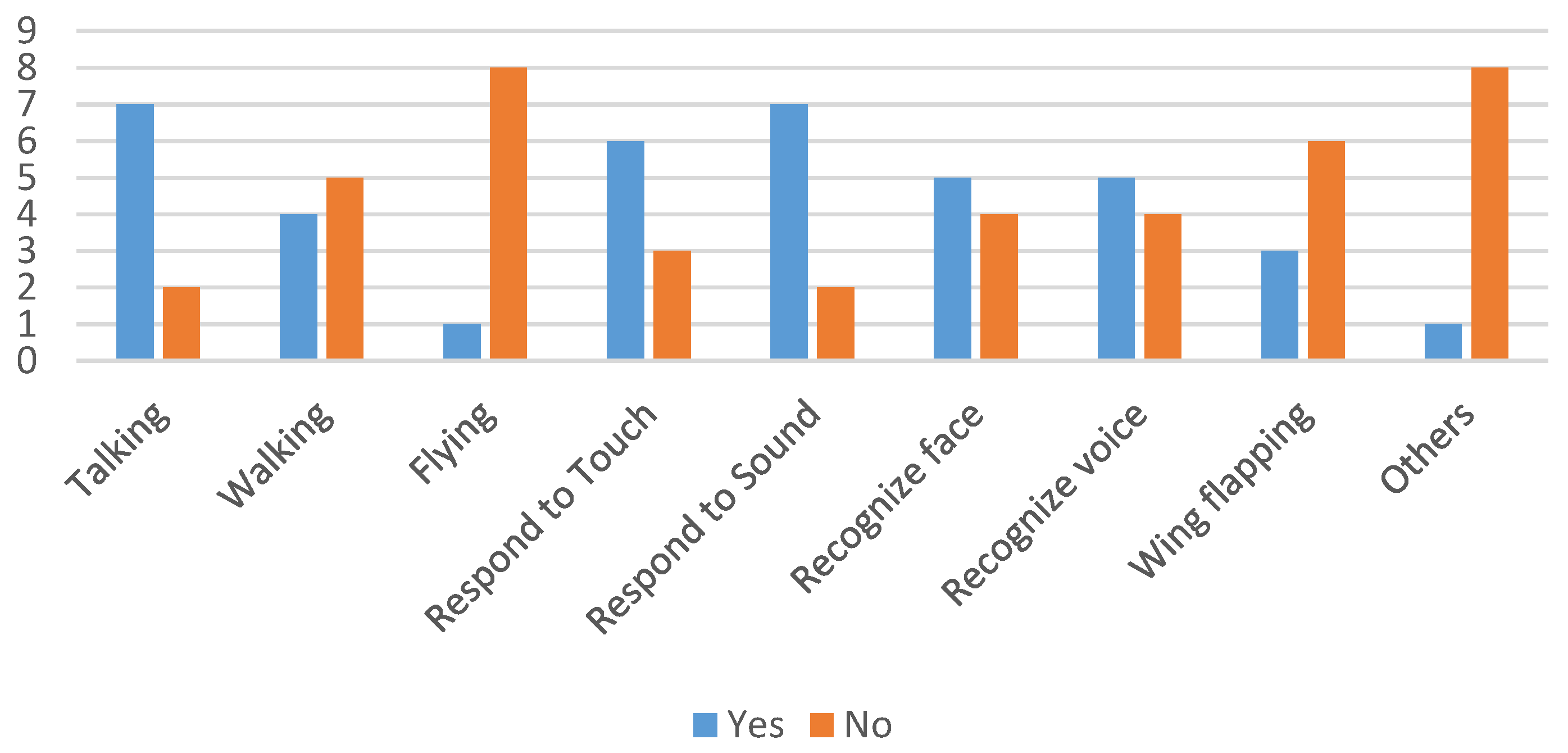
- I recommend the following features in KiliRo (options: talking, walking, flying, wing flapping, respond to sound, respond to touch, recognize face, and recognize voice).
- KiliRo could be a companion for children with autism.
- Parrot-like morphology is suitable teaching children with autism.
- My child tried to communicate with the robot during the study.
- My child observed the learning abilities of KiliRo during the study.
- My child accepted KiliRo as his/her companion.
- I recommend KiliRo for teaching children with autism.
- My child was happy to interact with KiliRo.
- AMRM might help improve cognitive abilities of children with autism.
- I recommend the following morphology for robot-assisted therapy (options: parrot, dog, cat, bear, seal, and human).
- I would use KiliRo for teaching my child.
2.3. Adapted-Model Rival Method (AMRM)
3. Results
3.1. Qualitative Analysis
3.2. Quantitative Analysis
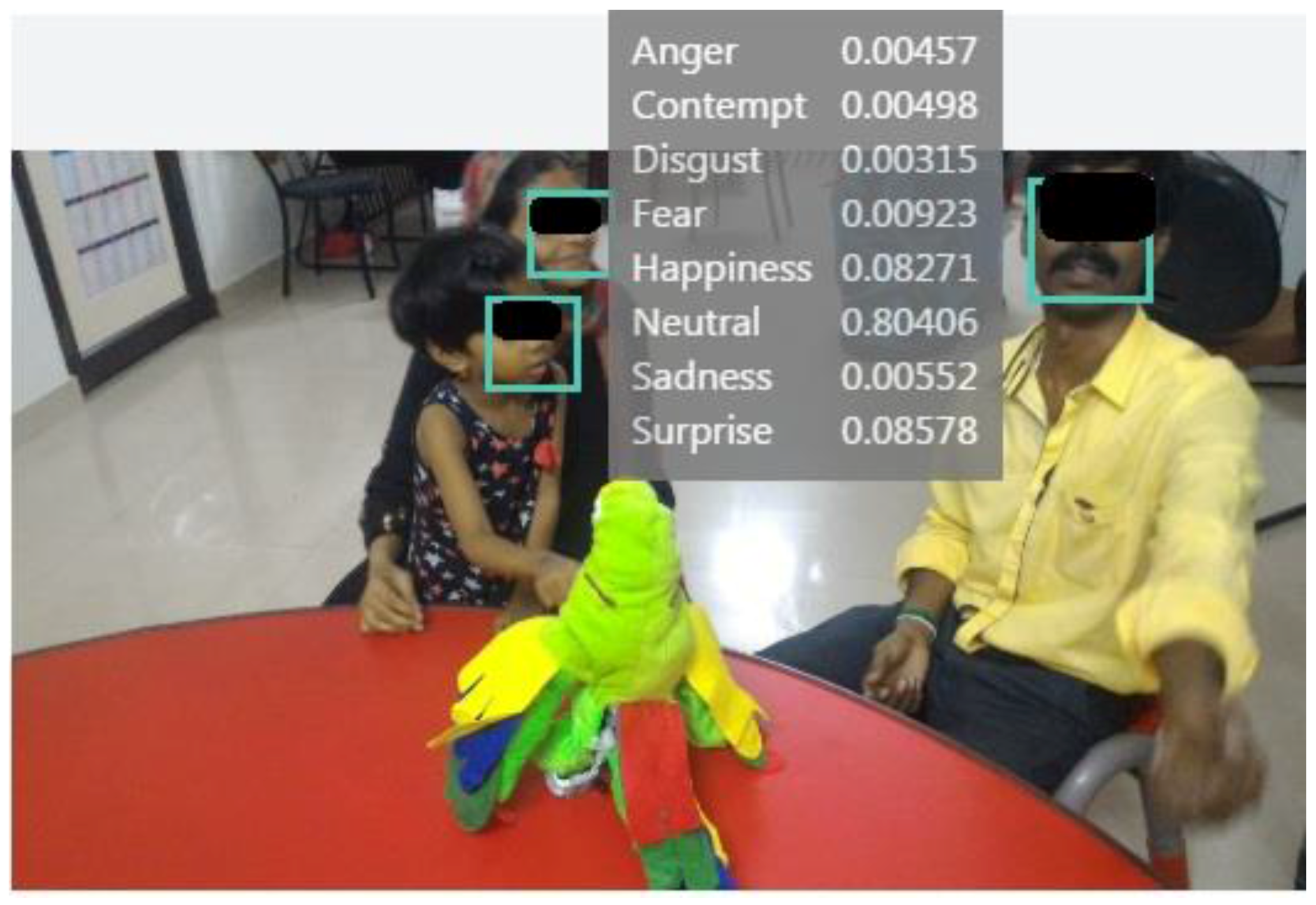
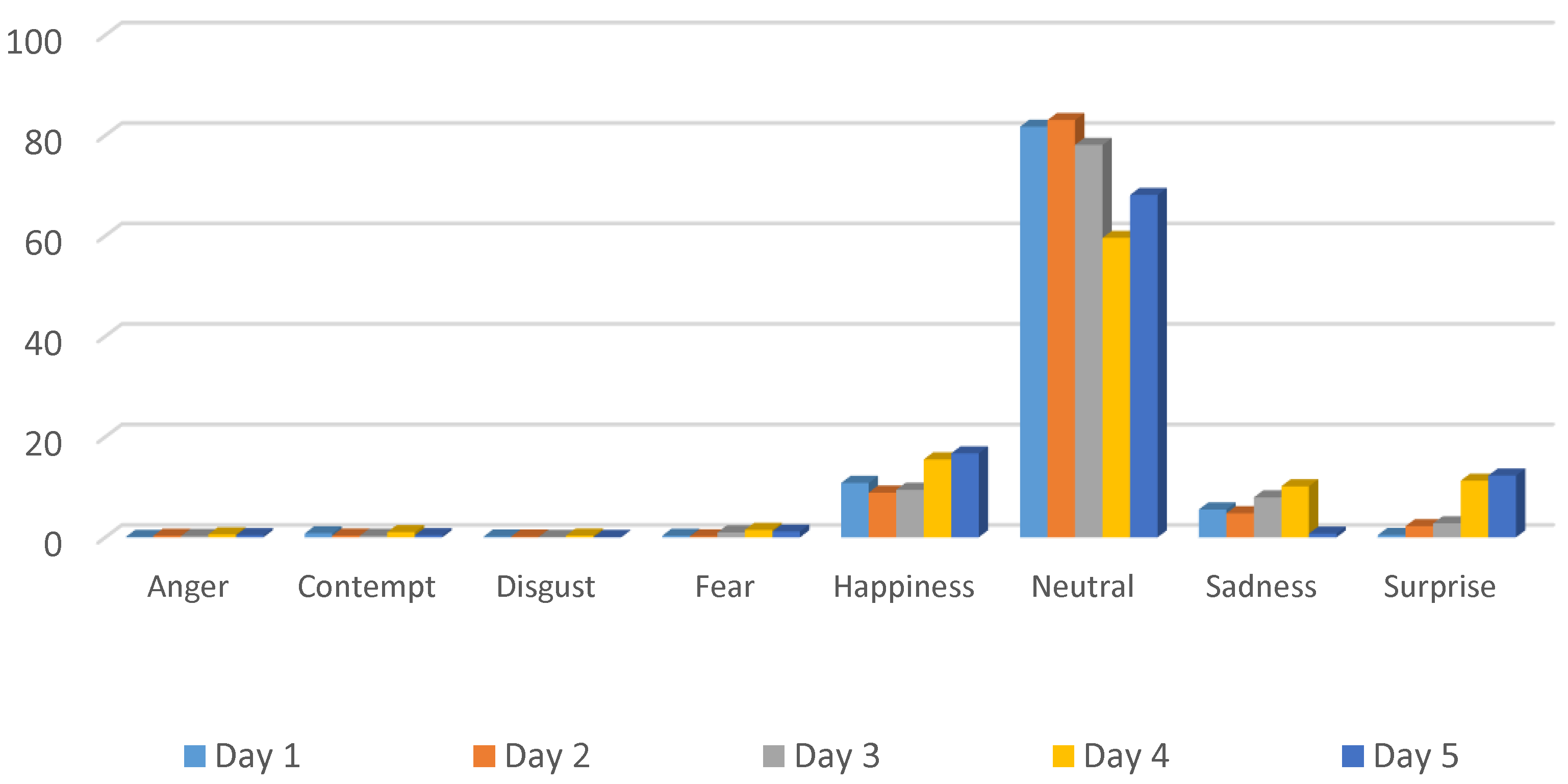
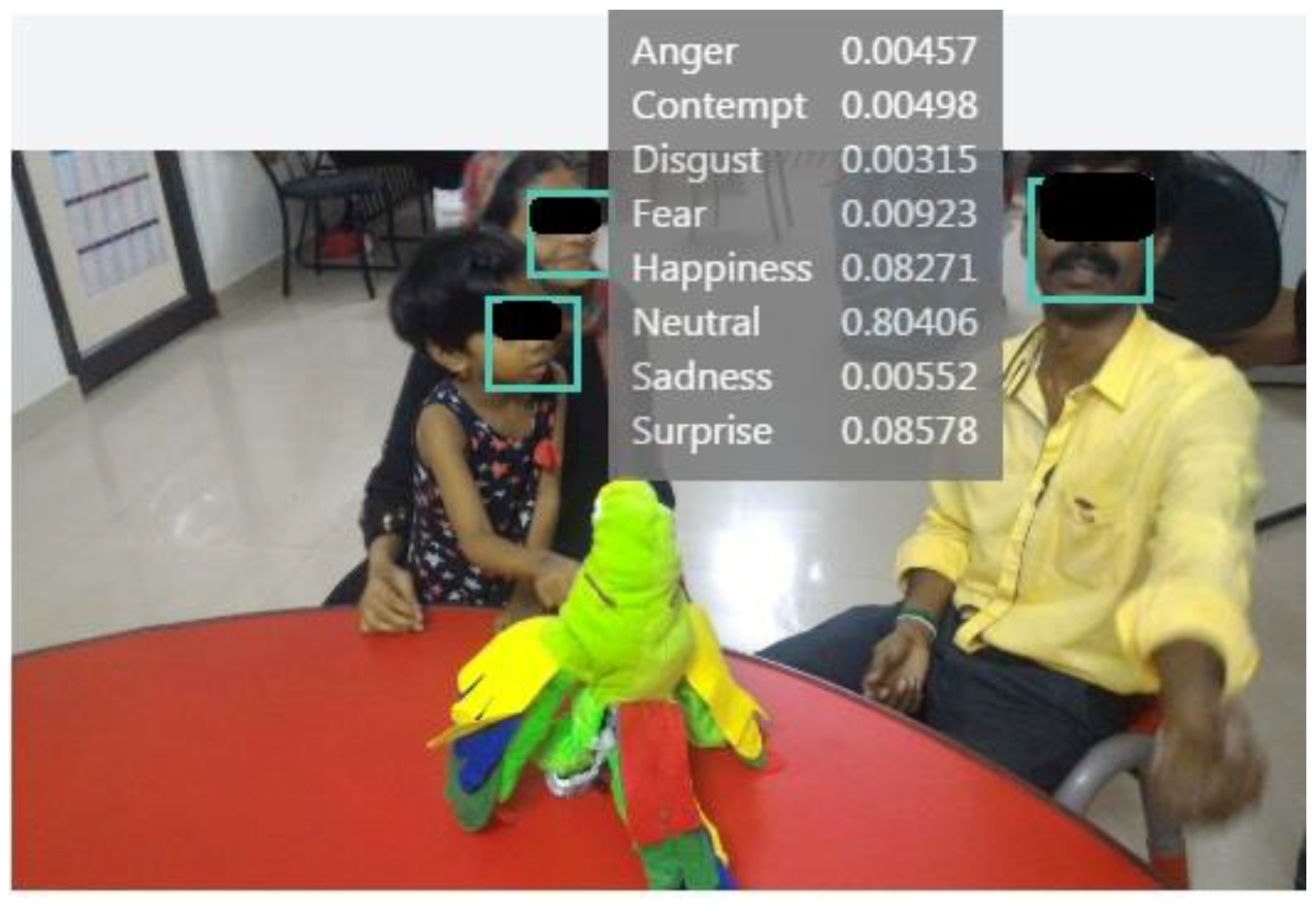
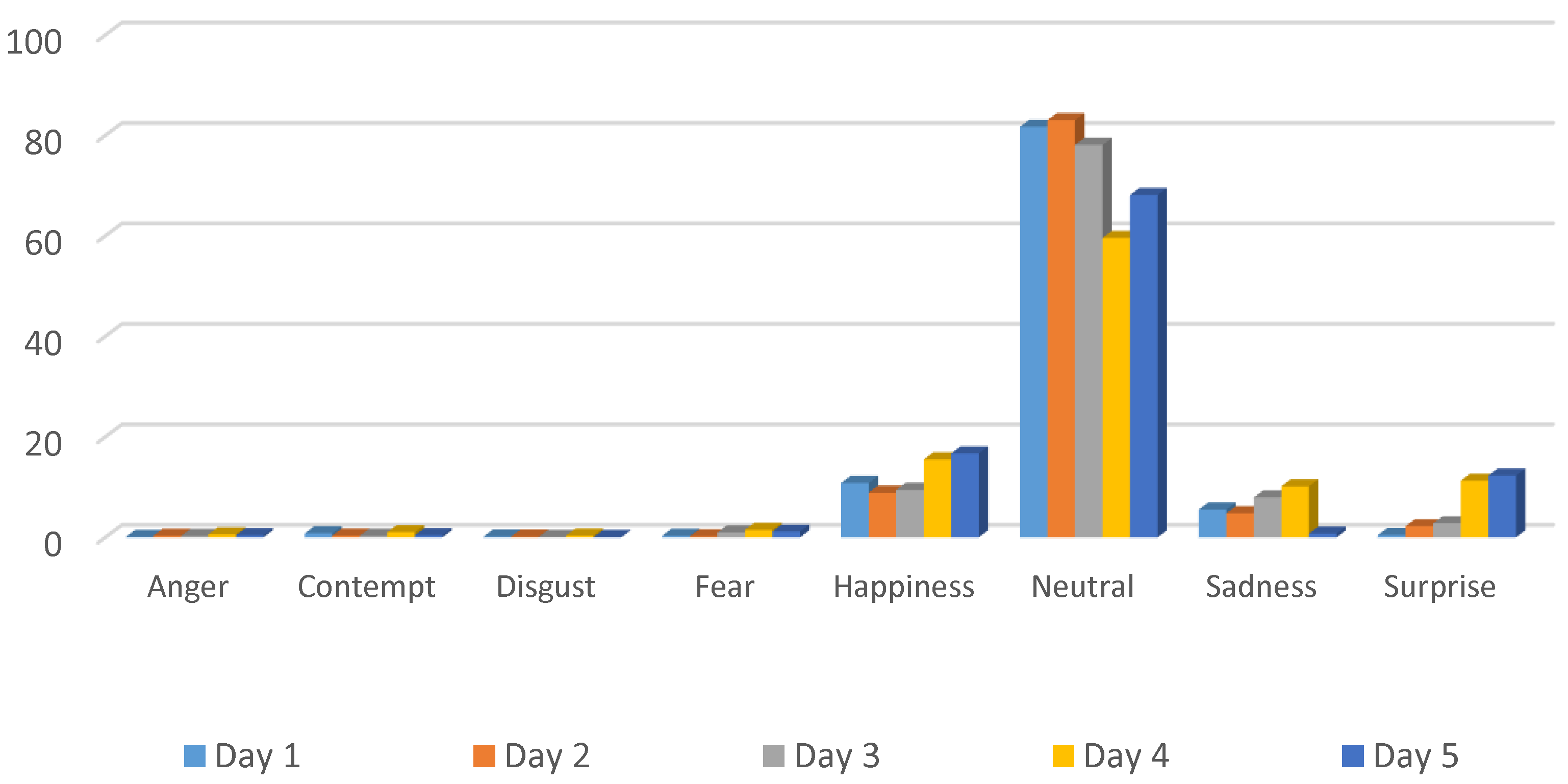
3.2.1. Emotion Recognition
3.2.2. Closed-Format Questionnaire
4. Conclusion
Ethical Approval
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Engelberger, J.F. Robotics in Practice: Management and Applications of Industrial Robots; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Phung, T.C.; Nguyen, D.A. Research on Design and Simulation of an Automatic Car Painting System in Thaco-Kia Company. In AETA 2015: Recent Advances in Electrical Engineering and Related Sciences; Springer: Cham, Switzerland, 2016; pp. 709–719. [Google Scholar]
- Do, T.N.; Tjahjowidodo, T.; Lau, M.W.S.; Phee, S.J. Nonlinear friction modelling and compensation control of hysteresis phenomena for a pair of tendon-sheath actuated surgical robots. Mech. Syst. Signal Process. 2015, 60, 770–784. [Google Scholar] [CrossRef]
- Severinson-Eklundh, K.; Green, A.; Hüttenrauch, H. Social and collaborative aspects of interaction with a service robot. Robot. Auton. Syst. 2003, 42, 223–234. [Google Scholar] [CrossRef]
- Tan, N.; Mohan, R.E.; Elangovan, K. A bio-inspired reconfigurable robot. In Advances in Reconfigurable Mechanisms and Robots II; Springer: Cham, Switzerland, 2016; pp. 483–493. [Google Scholar]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review. Gerontechnology 2009, 8, 94–103. [Google Scholar] [CrossRef]
- Bharatharaj, J.; Huang, L.; Al-Jumaily, M.; Krageloh, C.; Elara, M.R. Effects of Adapted Model-Rival Method and Parrot-Inspired Robot in improving Learning and Social Interaction among Children with Autism. In Proceedings of the International Conference on Robotics & Automation for Humanitarian Applications (RAHA), Kerala, India, 18–20 December 2016.
- Sabelli, A.M.; Kanda, T.; Hagita, N. A conversational robot in an elderly care center: An ethnographic study. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011.
- Feil-Seifer, D.; Matarić, M.J. Defining socially assistive robotics. In Proceedings of the 9th International Conference on Rehabilitation Robotics (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005.
- Bharatharaj, J.; Senthil Kumar, S. Considerations in Autism spectrum disorder therapy using robotics. In Proceedings of the 2013 Fourth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Tiruchengode, India, 4–6 July 2013.
- Kozima, H.; Nakagawa, C.; Yasuda, Y. Children–robot interaction: A pilot study in autism spectrum disorder therapy. Prog. Brain Res. 2007, 164, 385–400. [Google Scholar] [PubMed]
- Scassellati, B.; Admoni, H.; Mataric, M. Robots for use in autism spectrum disorder research. Ann. Rev. Biomed. Eng. 2012, 14, 275–294. [Google Scholar] [CrossRef] [PubMed]
- Wada, K.; Shibata, T. Living with seal robots—Its sociopsychological and physiological influences on the elderly at a care house. IEEE Trans. Robot. 2007, 23, 972–980. [Google Scholar] [CrossRef]
- Fujita, M. On activating human communications with pet-type robot AIBO. Proc. IEEE 2004, 92, 1804–1813. [Google Scholar] [CrossRef]
- Jaichandar, K.S.; Elara, M.R.; García, E.A.M. Investigation of facial infrared thermography during interaction with therapeutic pet robot during cognitive training: A quantitative approach. In Proceedings of the 6th International Conference on Rehabilitation Engineering & Assistive Technology, Tampines, Singapore, 24–26 July 2012.
- Tapus, A.; Peca, A.; Aly, A.; Pop, C.; Jisa, L.; Pintea, S.; David, D.O. Children with autism social engagement in interaction with Nao, an imitative robot: A series of single case experiments. Int. Stud. 2012, 13, 315–347. [Google Scholar] [CrossRef]
- Billard, A.; Robins, B.; Nadel, J.; Dautenhahn, K. Building robota, a mini-humanoid robot for the rehabilitation of children with autism. Assist. Technol. 2007, 19, 37–49. [Google Scholar] [CrossRef] [PubMed]
- Bharatharaj, J.; Huang, L.; Al-Jumaily, A. Bio-inspired therapeutic pet robots: Review and future direction. In Proceedings of the 2015 10th International Conference on Information, Communications and Signal Processing (ICICS), Singapore, 2–4 December 2015.
- Pepperberg, I.M. Talking with Alex: Logic and speech in parrots. Sci. Am. 1998, 9, 60–65. [Google Scholar]
- Model-Rival Training Technique. Available online: https://www.petcha.com/model-rival-training-technique (accessed on 22 November 2016).
- Scholtyssek, C. Bird brains? Hardly. Sci. Am. Mind 2006, 17, 50–55. [Google Scholar] [CrossRef]
- Villano, M.; Crowell, C.R.; Wier, K.; Tang, K.; Thomas, B.; Shea, N.; Diehl, J.J. DOMER: A wizard of oz interface for using interactive robots to scaffold social skills for children with autism spectrum disorder spectrum disorders. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011.
- Steinfeld, A.; Jenkins, O.C.; Scassellati, B. The oz of wizard: Simulating the human for interaction research. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), La Jolla, CA, USA, 11–13 March 2009.
- Worthy, P.; Boden, M.; Karimi, A.; Weigel, J.; Matthews, B.; Hensby, K.; Viller, S. Children’s expectations and strategies in interacting with a wizard of oz robot. In Proceedings of the Annual Meeting of the Australian Special Interest Group for Computer Human Interaction, Melbourne, Victoria, Australia, 7–10 December 2015.
- Williams, J.; Scott, F.; Stott, C.; Allison, C.; Bolton, P.; Baron-Cohen, S.; Brayne, C. The CAST (childhood asperger syndrome test) test accuracy. Autism Spectr. Disord. 2005, 9, 45–68. [Google Scholar]
- Sandelowski, M. Focus on research methods-whatever happened to qualitative description? Res. Nurs. Health 2000, 23, 334–340. [Google Scholar] [CrossRef]
- Recognize Emotions in Images. Available online: https://www.microsoft.com/cognitive-services/en-us/emotion-api (accessed on 22 November 2016).
- Kozima, H.; Nakagawa, C.; Yasuda, Y. Interactive robots for communication-care: A case-study in autism spectrum disorder therapy. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication (ROMAN 2005), Nashville, TN, USA, 13–15 August 2005.
- Stanton, C.M.; Kahn, P.H., Jr.; Severson, R.L.; Ruckert, J.H.; Gill, B.T. Robotic animals might aid in the social development of children with autism spectrum disorder. In Proceedings of the 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, 12–15 March 2008.
- Cabibihan, J.J.; Javed, H.; Ang, M., Jr.; Aljunied, S.M. Why robots? A survey on the roles and benefits of social robots in the therapy of children with autism spectrum disorder. Int. J. Soc. Robot. 2013, 5, 593–618. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participant | Q1 | Q2 | Q3 | Q5 | Q6 | Q7 | Q8 | Q9 | Q10 | Q11 | Q12 | Q14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parent 1 | 4 | 4 | 3 | 3 | 4 | 2 | 3 | 3 | 4 | 2 | 4 | 4 |
| Parent 2 | 4 | 4 | 4 | 3 | 5 | 4 | 4 | |||||
| Parent 3 | 4 | 5 | 4 | 4 | 5 | 4 | 4 | 3 | 4 | 5 | 3 | 3 |
| Parent 4 | 5 | 4 | 5 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | 5 |
| Parent 5 | 4 | 4 | 4 | 4 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 5 |
| Parent 6 | 4 | 4 | 4 | 5 | 5 | 5 | 4 | 5 | 5 | 5 | 5 | 5 |
| Parent 7 | 4 | 3 | 4 | 3 | 4 | 3 | 4 | 3 | 3 | 3 | 3 | |
| Parent 8 | 3 | 3 | 3 | 4 | ||||||||
| Parent 9 | 4 | 4 | 4 | 4 | 5 | 4 | 4 | |||||
| Mean | 4.00 | 3.89 | 3.89 | 3.78 | 4.38 | 3.71 | 4.00 | 4.00 | 4.13 | 4.00 | 4.00 | 4.14 |
| n | 9 | 9 | 9 | 9 | 8 | 7 | 6 | 5 | 8 | 6 | 6 | 7 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bharatharaj, J.; Huang, L.; Mohan, R.E.; Al-Jumaily, A.; Krägeloh, C. Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder. Robotics 2017, 6, 4. https://doi.org/10.3390/robotics6010004
Bharatharaj J, Huang L, Mohan RE, Al-Jumaily A, Krägeloh C. Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder. Robotics. 2017; 6(1):4. https://doi.org/10.3390/robotics6010004
Chicago/Turabian StyleBharatharaj, Jaishankar, Loulin Huang, Rajesh Elara Mohan, Ahmed Al-Jumaily, and Christian Krägeloh. 2017. "Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder" Robotics 6, no. 1: 4. https://doi.org/10.3390/robotics6010004
APA StyleBharatharaj, J., Huang, L., Mohan, R. E., Al-Jumaily, A., & Krägeloh, C. (2017). Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder. Robotics, 6(1), 4. https://doi.org/10.3390/robotics6010004