
Towards Bio-Inspired Chromatic Behaviours in Surveillance Robots


 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
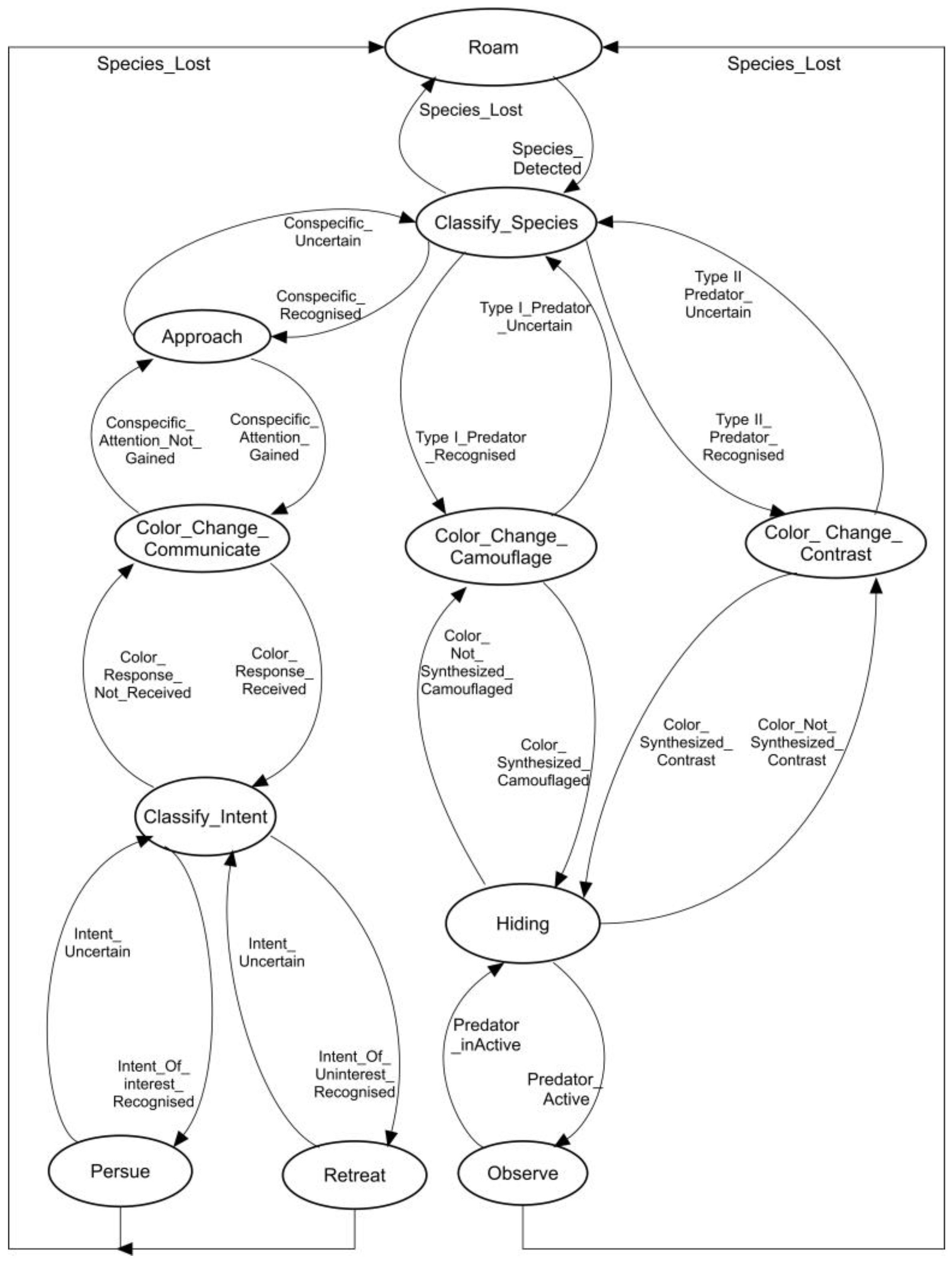
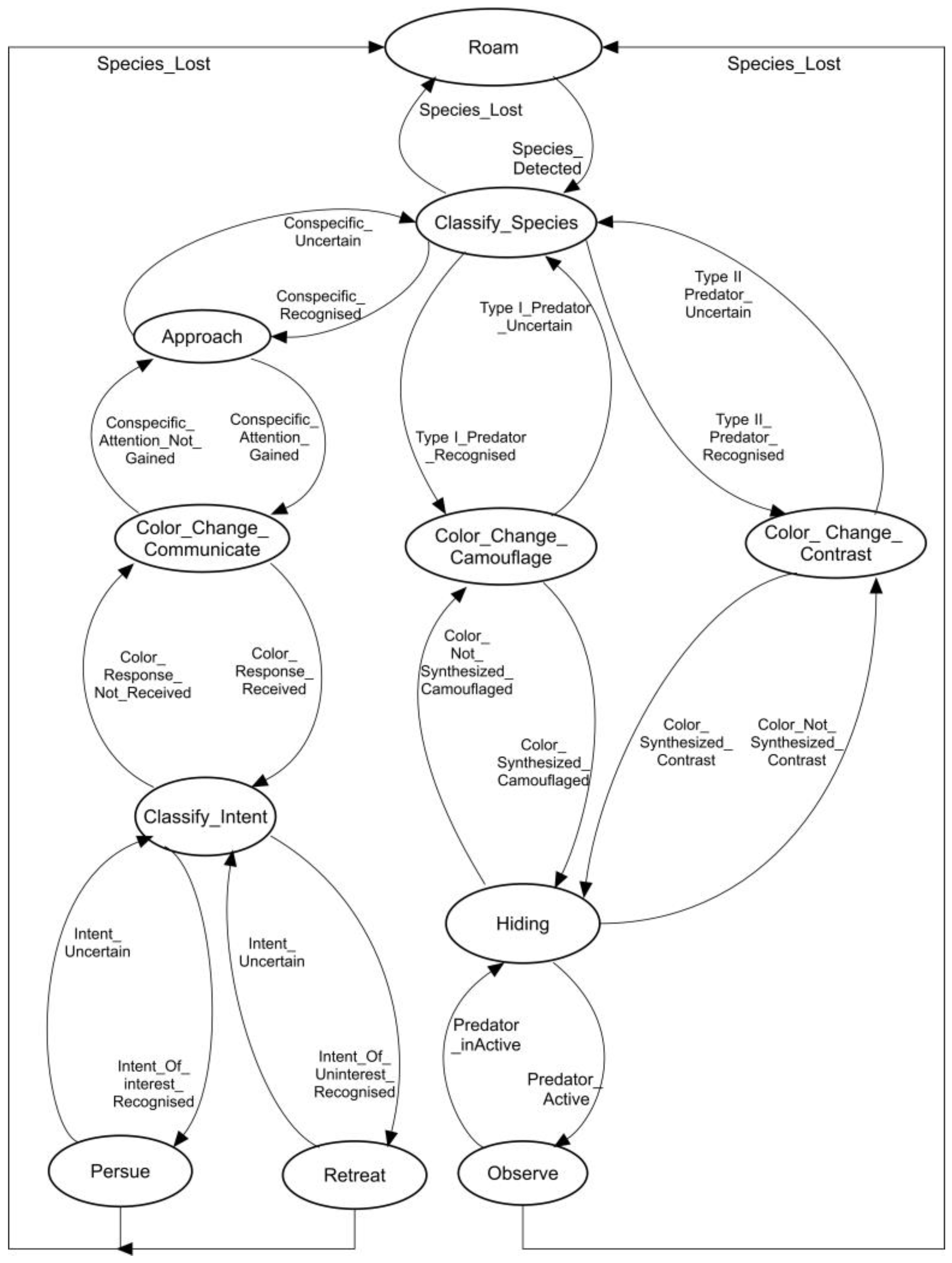
Chromatic Behaviours in the Dwarf Chameleon
- (a)
- Roam: It roams around looking for other species; if detected, “Species_Detected” condition is triggered to enable the “Classify_Species” state.
- (b)
- Classify_Species: It classifies the detected species into either conspecifics or specific type of predators (Type I_Predator or Type II_Predator). If conspecifics “Recognized” condition is triggered, the chameleon enables the “Approach” state to move immediately towards the conspecifics to attract attention. If “Type I_Predator recognized” is activated, then the chameleon switches to “Change_Colour_Camouflage” state. If “Type II_Predator recognized” is activated, then the chameleon switches to “Colour_Change_Contrast” state. At this juncture, another possibility is the activation of the “Species_Lost” condition which leads back to the “Roam” state.
- (c)
- Approach: The chameleon starts approaching the conspecific to gain attention. If the “Conspecifics_Attention_Gained” condition is activated, then the Colour_Change_Communicate state is enabled whereas if the Conspecific_Uncertain is activated, then the chameleon switches back to the Classify_Species state.
- (d)
- Colour_Change_Communicate: At this stage, the dwarf chameleon engages in social communication with the conspecifics using skin colouration. If the Colour_Response_Received from the interacting dwarf chameleon is activated, then the Classify_Intent state is enabled whereas if the Conspecific_Attention_Not_Gained is activated then the chameleon switches back to the Approach state.
- (e)
- Classify_Intent: In this state, the chameleon classifies the detected intention based on the colour response received from the interacting chameleon. If the Intent_of_Interest_Recognized condition is triggered, the chameleon enables the Pursue state to immediately pursue towards the conspecifics. However, if the Intent_of_Uninterest_Recognized is activated then the chameleon enables the Retreat state. Else, if Colour_Response_Not_Received is activated then the chameleon switches back to the Colour_Change_Communicate state.
- (f)
- Pursue: In this state, the chameleon moves actively towards the conspecifics. If the Species_Lost condition is activated, then the chameleon switches to the Roam state. Else if the Intent_Uncertain state is activated then the Classify_Intent state is enabled.
- (g)
- Retreat: In this state, the chameleon falls back, moving away from the conspecifics. If the Species_Lost condition is activated, then the chameleon switches to the Roam state. Else, if the Intent_Uncertain state is activated then the Classify_Intent state is enabled.
- (h)
- Colour_Change_Camouflage: To hide itself from the Type I_Predator, the chameleon alters its chromatophore functions to produce colours closer to that of the terrain it is traversing. If the Colour_Synthesized_Camouflage condition is activated, then the chameleon enables the Hiding state. Else, if the Type I_Predator_Uncertain condition is triggered, then the chameleon switches back to the Classify_Species state.
- (i)
- Colour_Change_Contrast: To hide itself from the Type II_Predator, the chameleon varies the activity of different chromatophores in its layers of skin to produce contrasting colours in relation to its background. If the Colour_Synthesized_Contrast condition is activated, then the chameleon enables the Hiding state. Else, if the Type II_Predator_Uncertain condition is triggered, then the chameleon switches back to the Classify_Species state.
- (j)
- Hiding: In this state, the dwarf chameleon goes into a passive static mode to escape from a predator with a synthesized skin colour in relation to the identified predator and background. If the Predator_Active condition is activated, then the Observe state is enabled. However, if the Colour_Not_Synthesized_Contrast is triggered then the chameleon goes back to the Colour_Change_Contrast state. Else, if the Colour_Not_Synthesized_Camouflage is triggered then the chameleon goes back to the Colour_Change_Camouflage state.
- (k)
- Observe: In this state, the chameleon passively monitors the activity of the predator. If the Species_Lost condition is activated, then the chameleon goes to the Roam state. Else, if the Predator_Inactive condition is triggered, then the Hiding state is enabled.
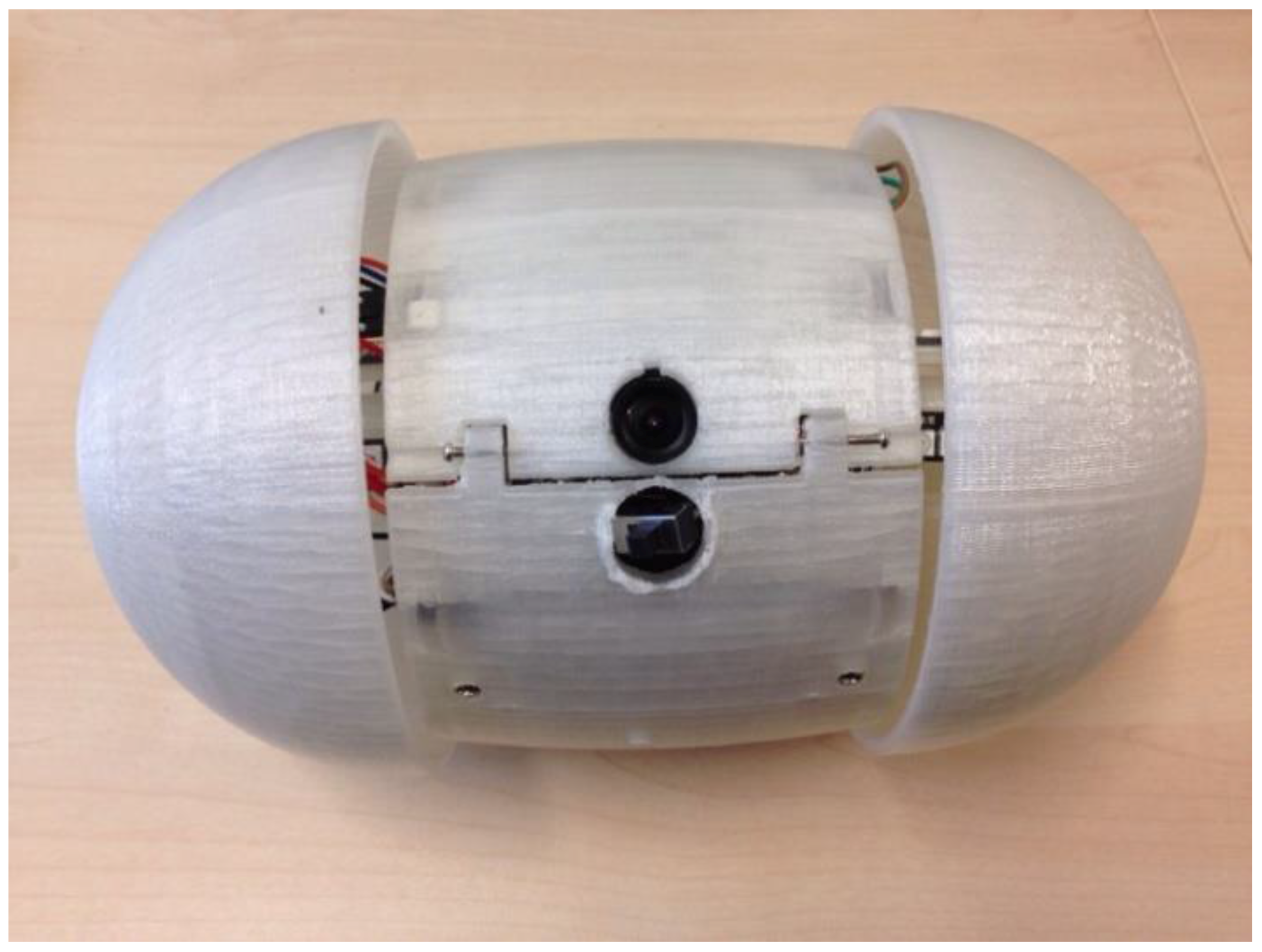
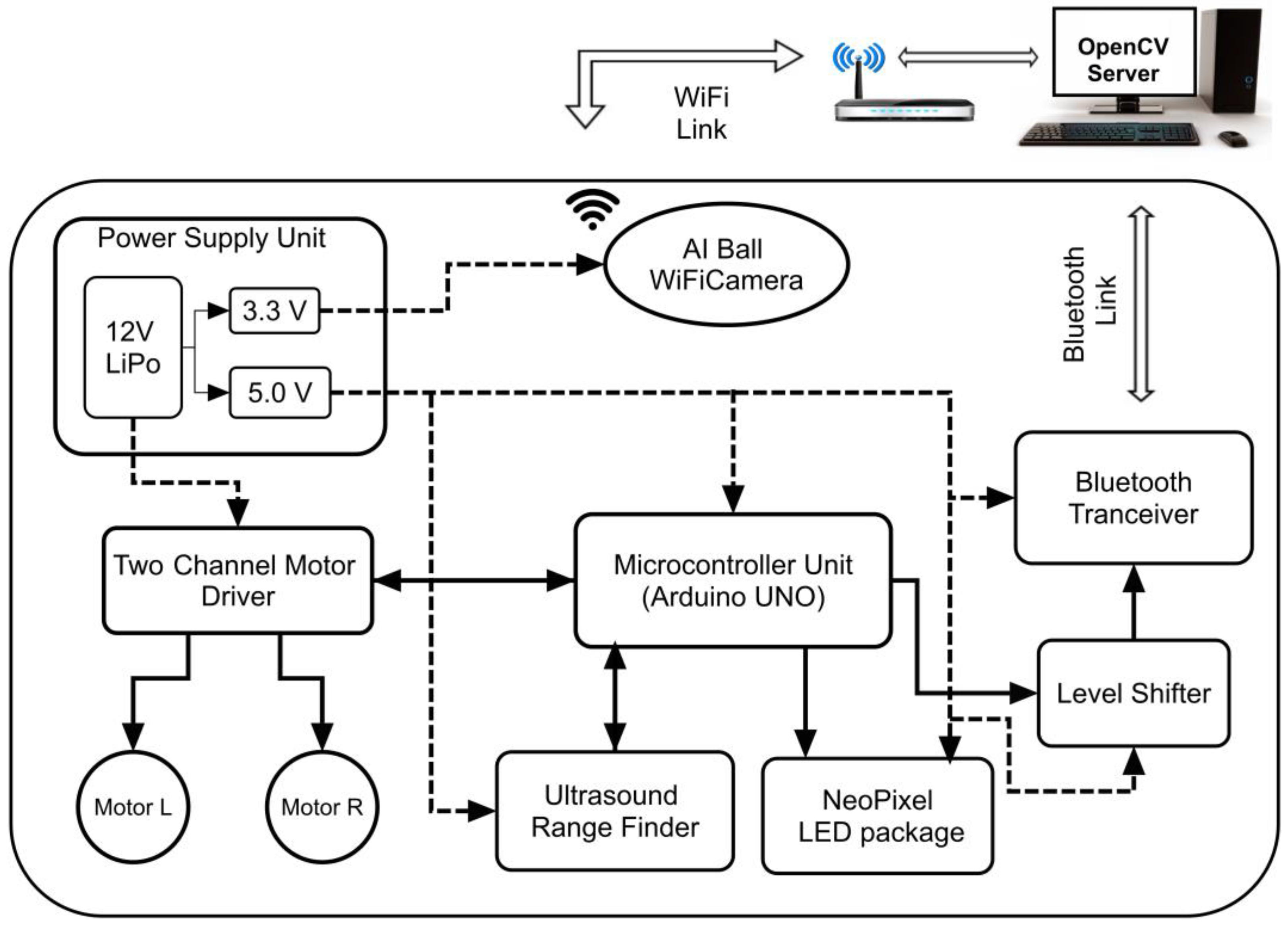
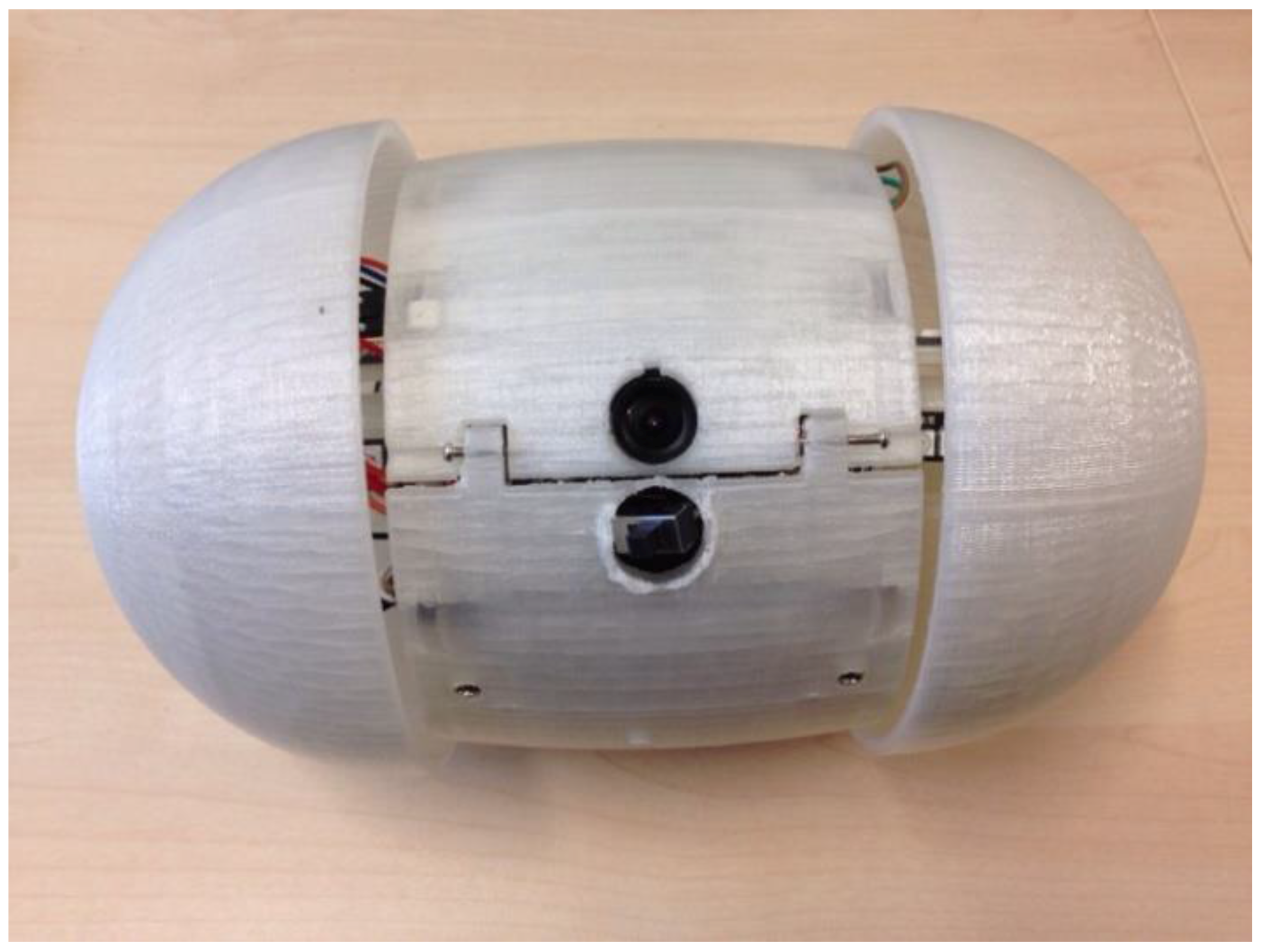
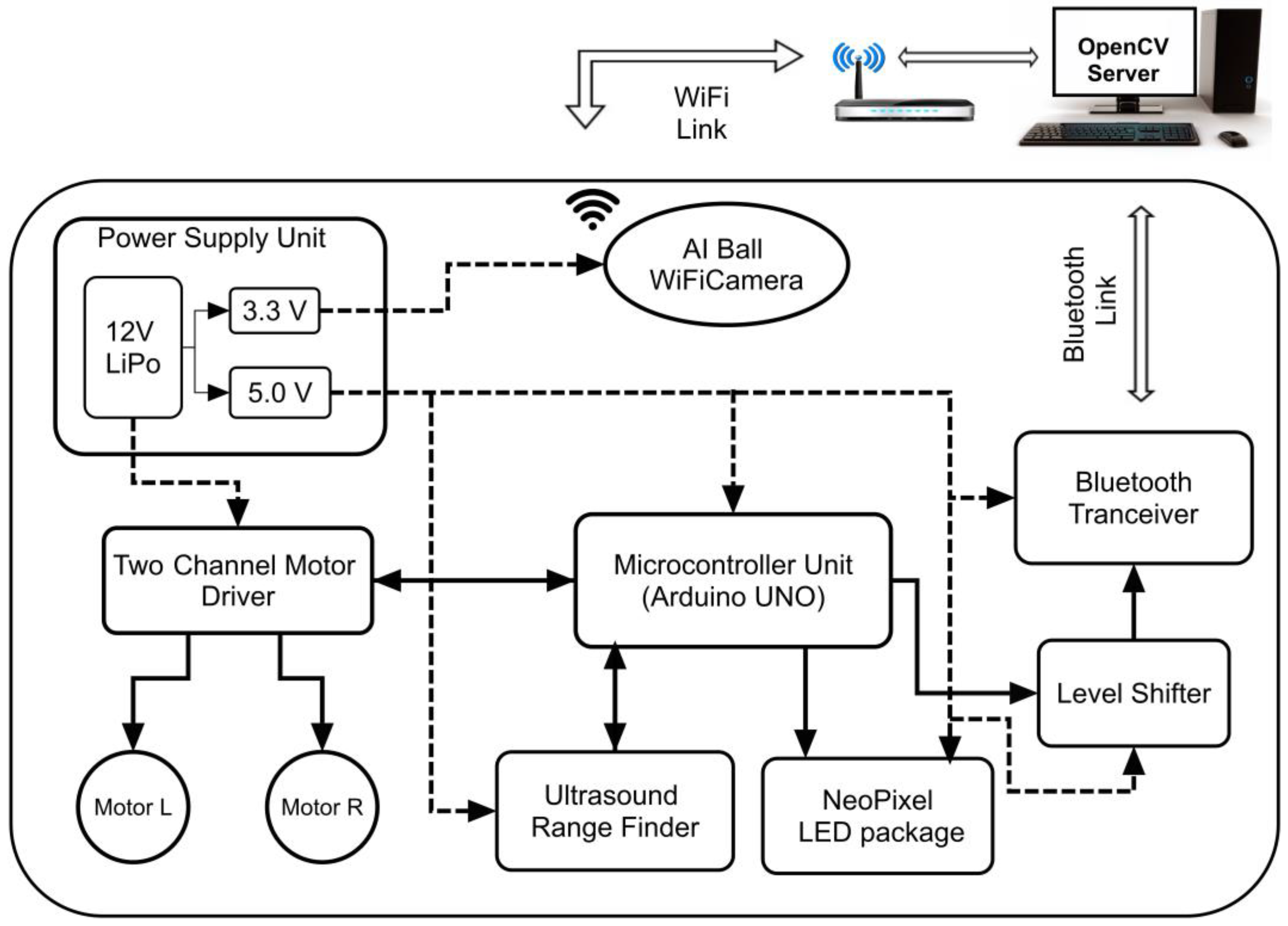
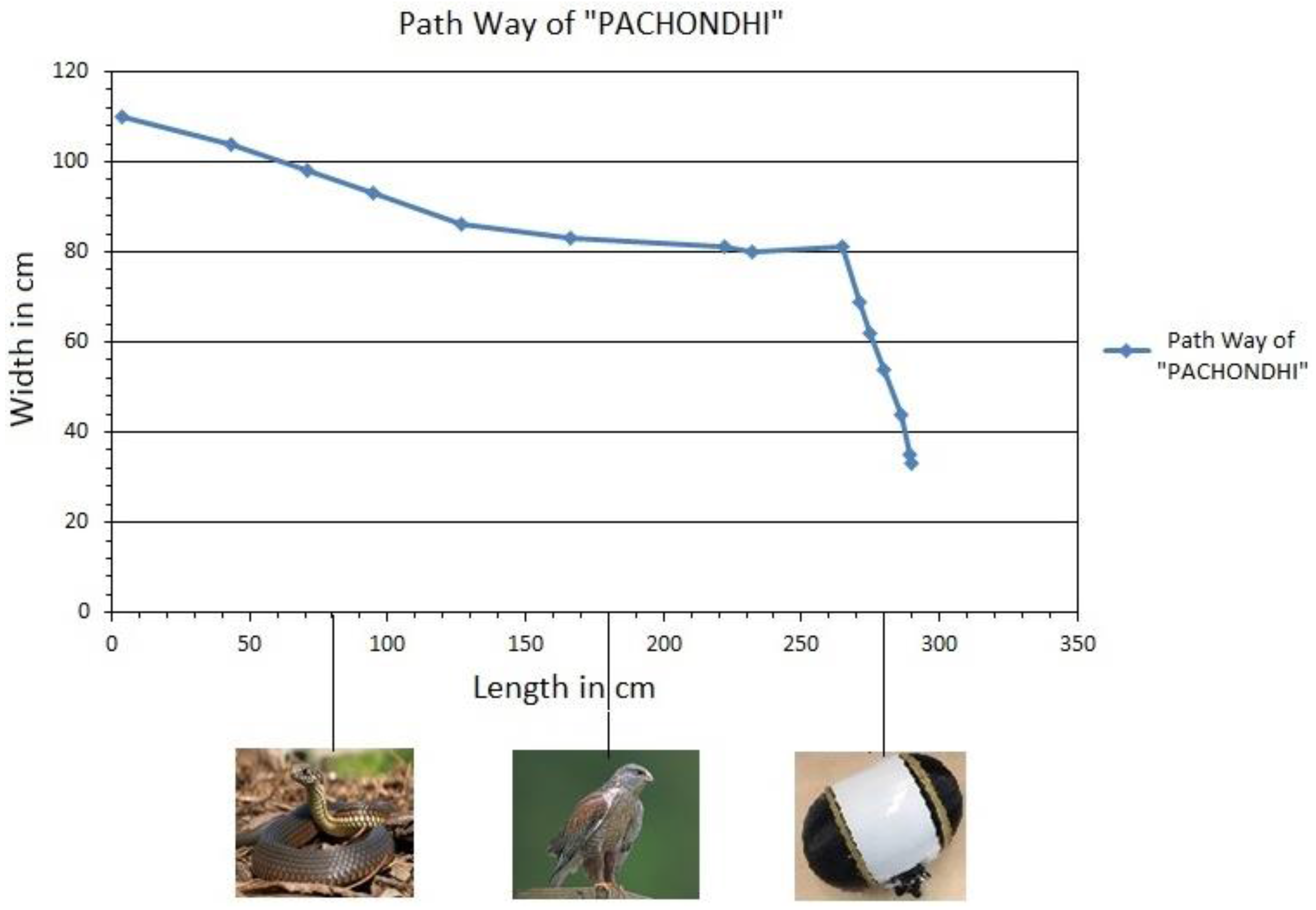
3. Design and “PACHONDHI” Robot Implementation
Robot Platform
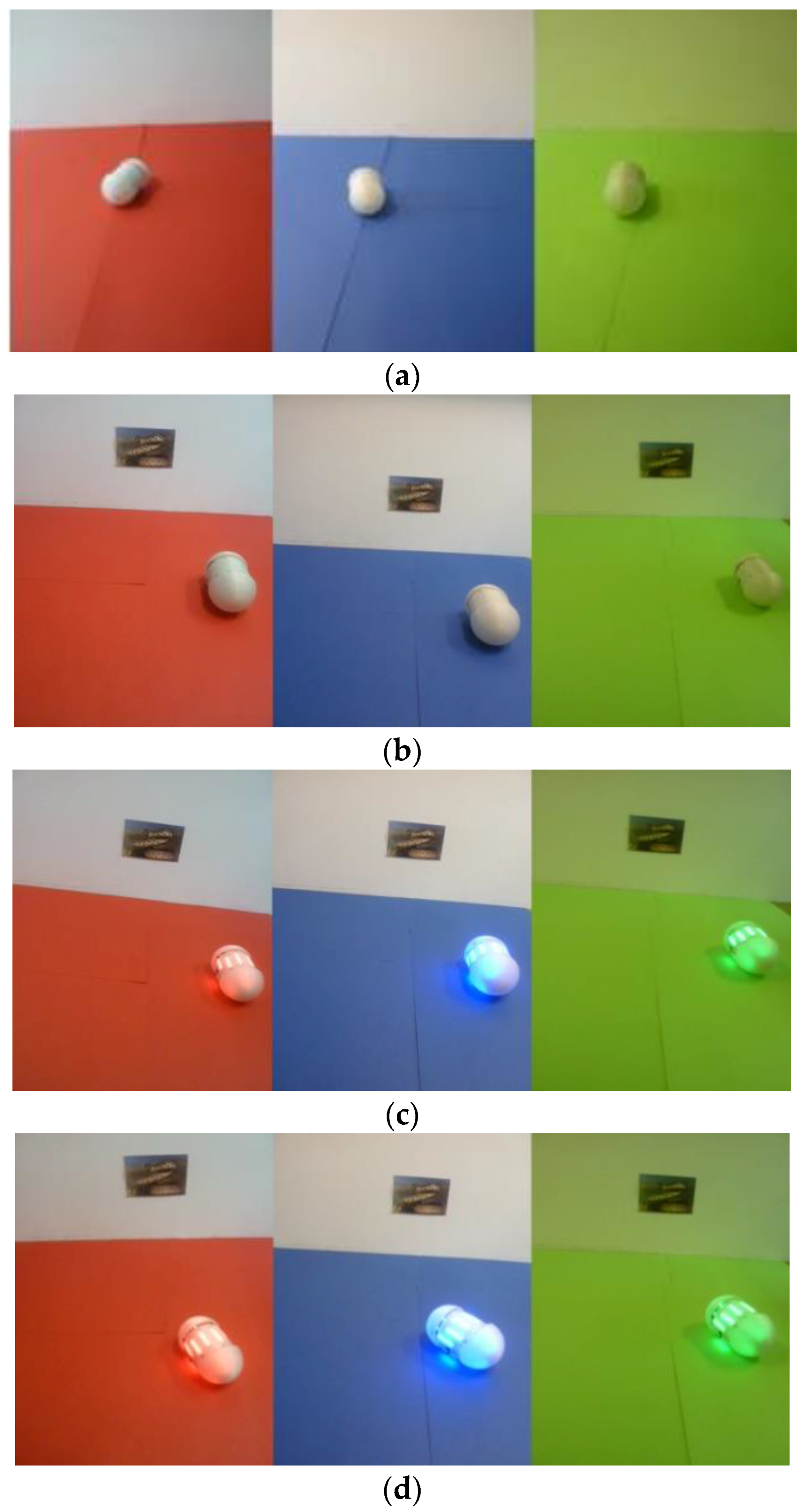
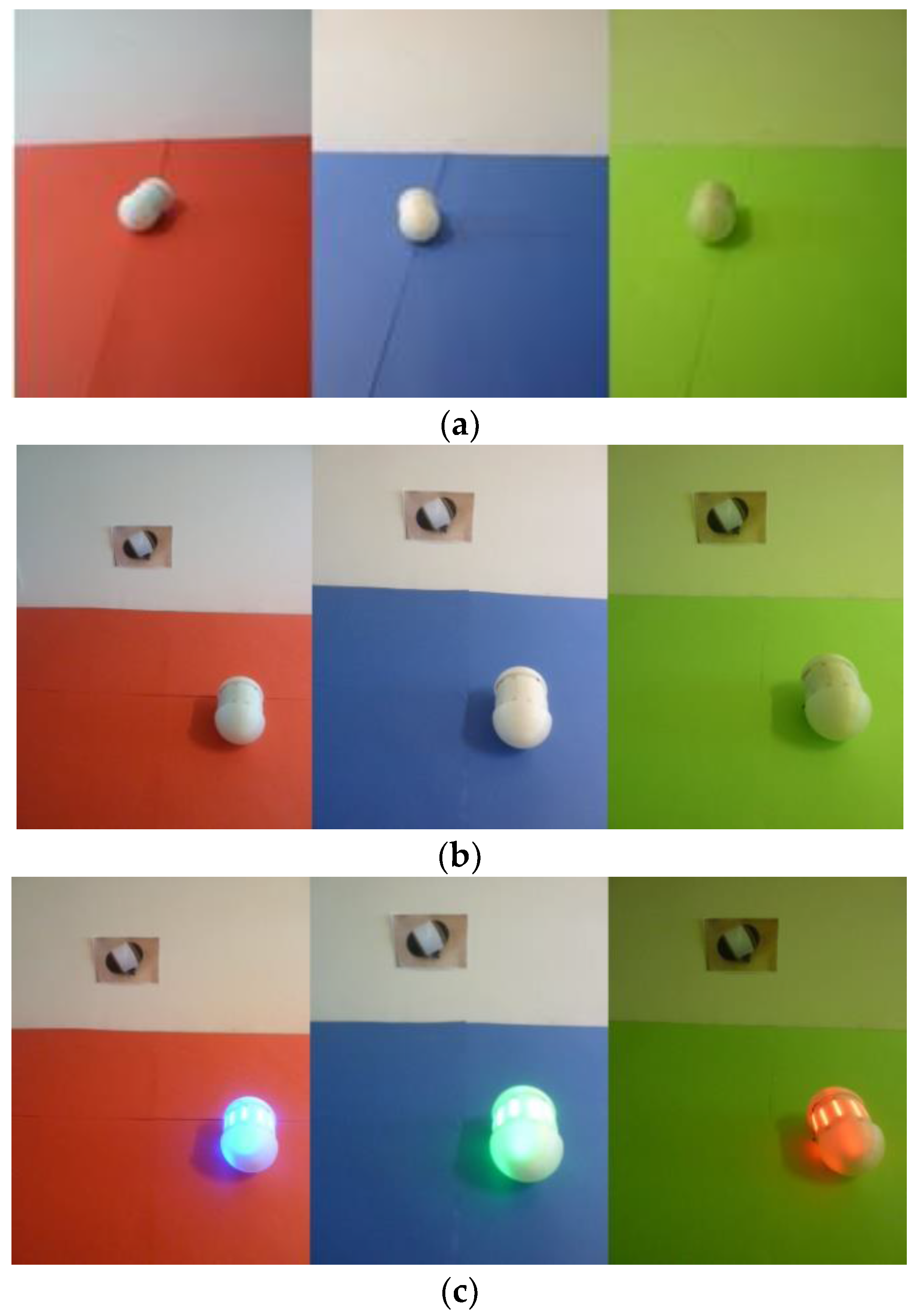
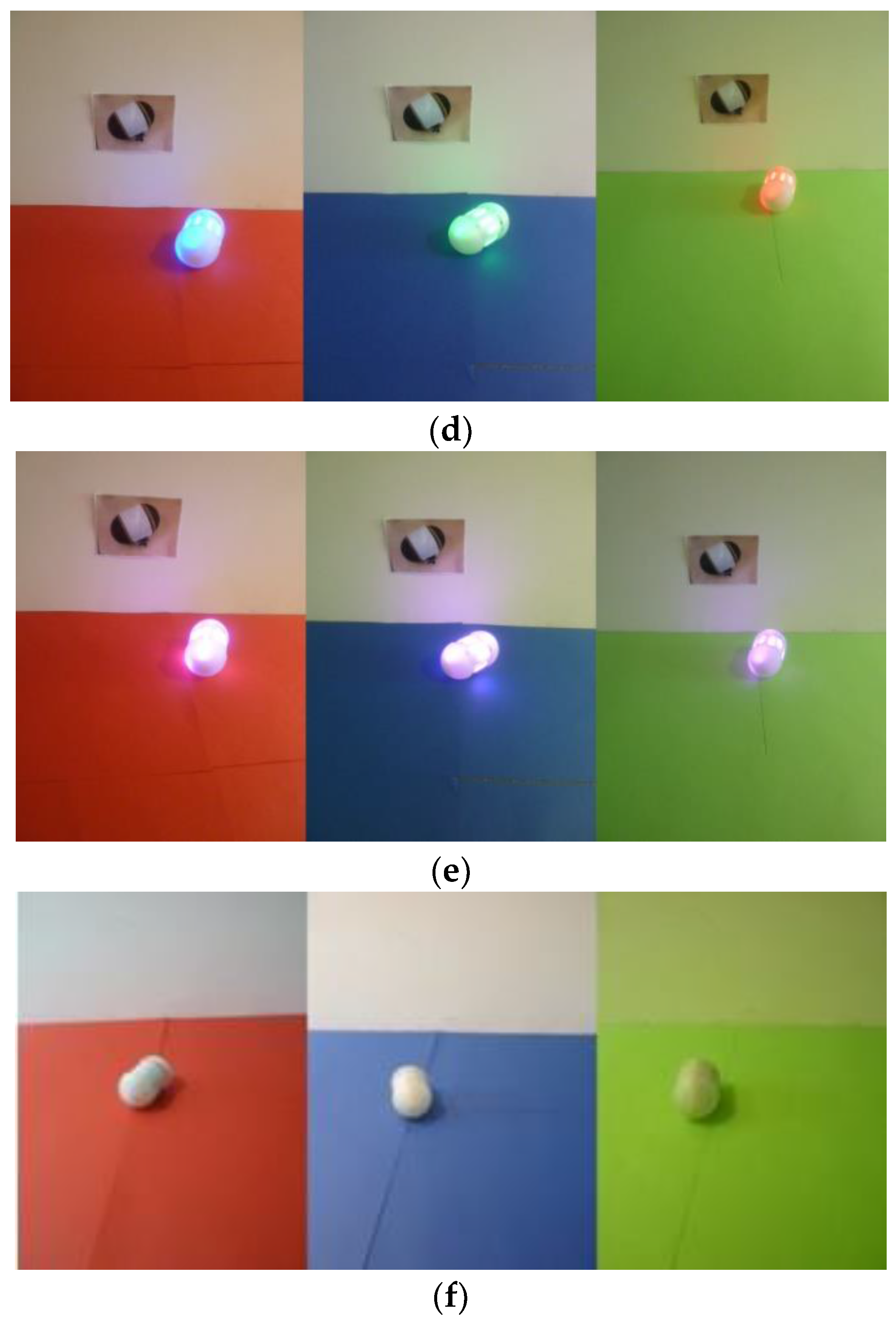
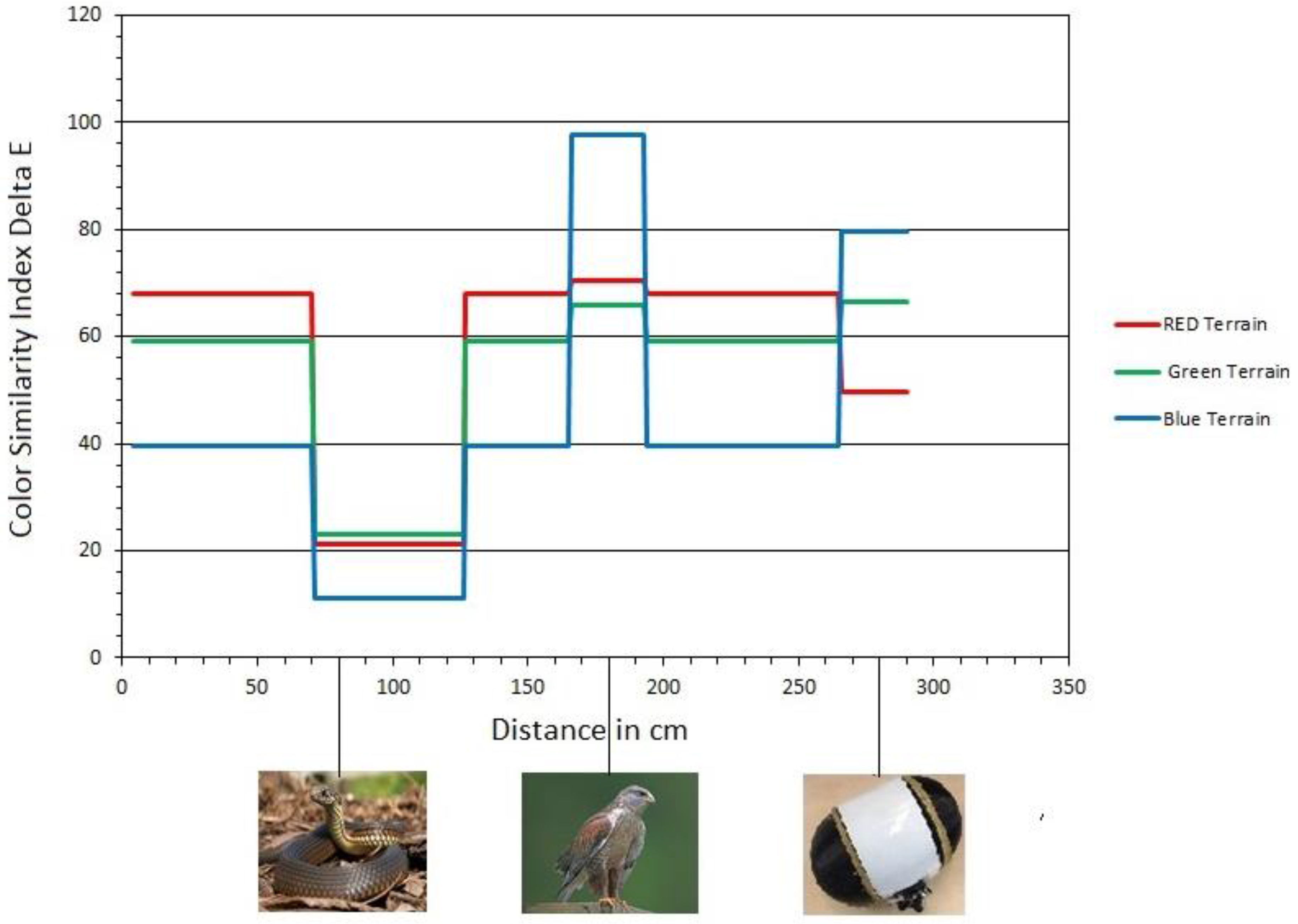
4. Experiments and Results
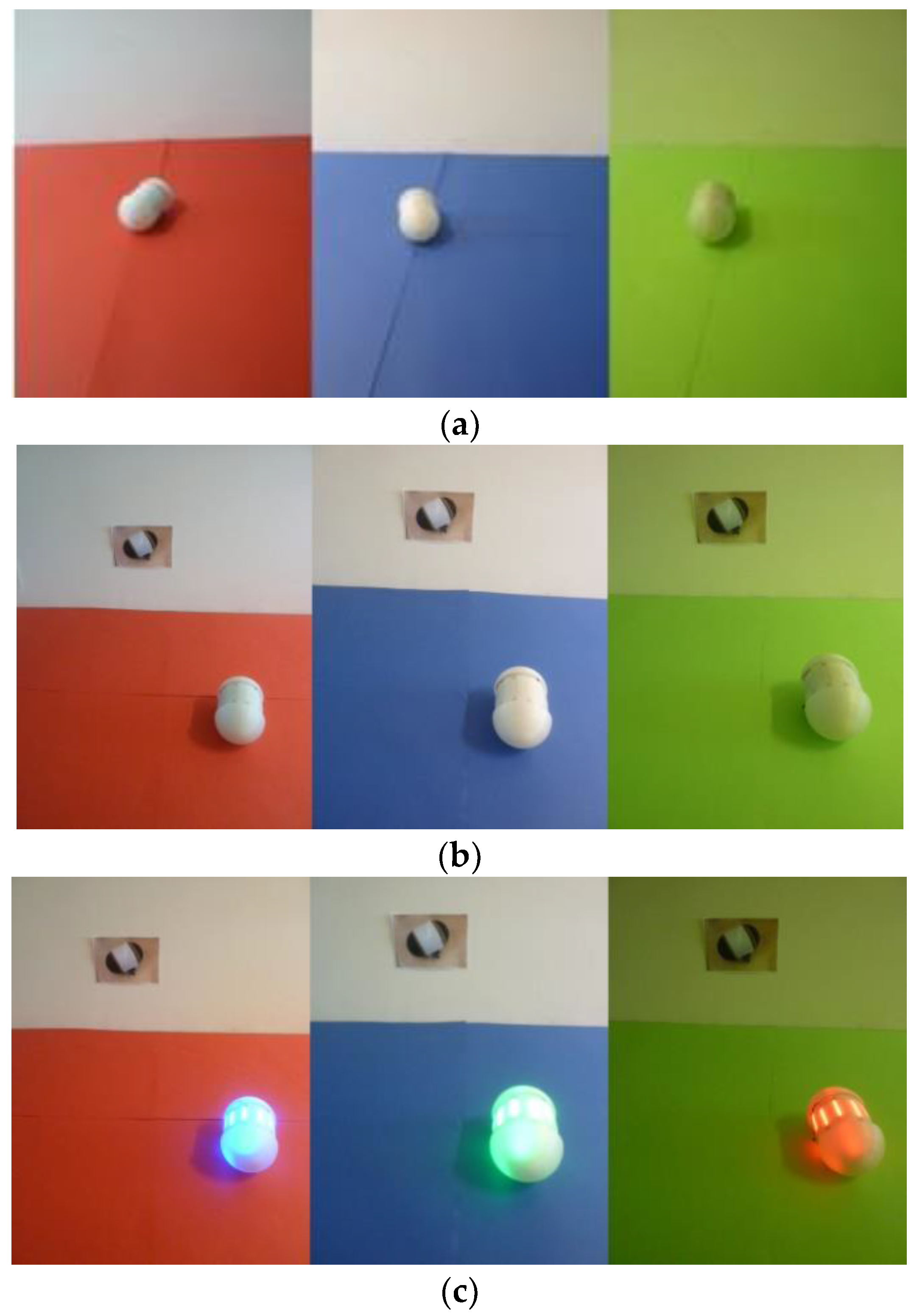
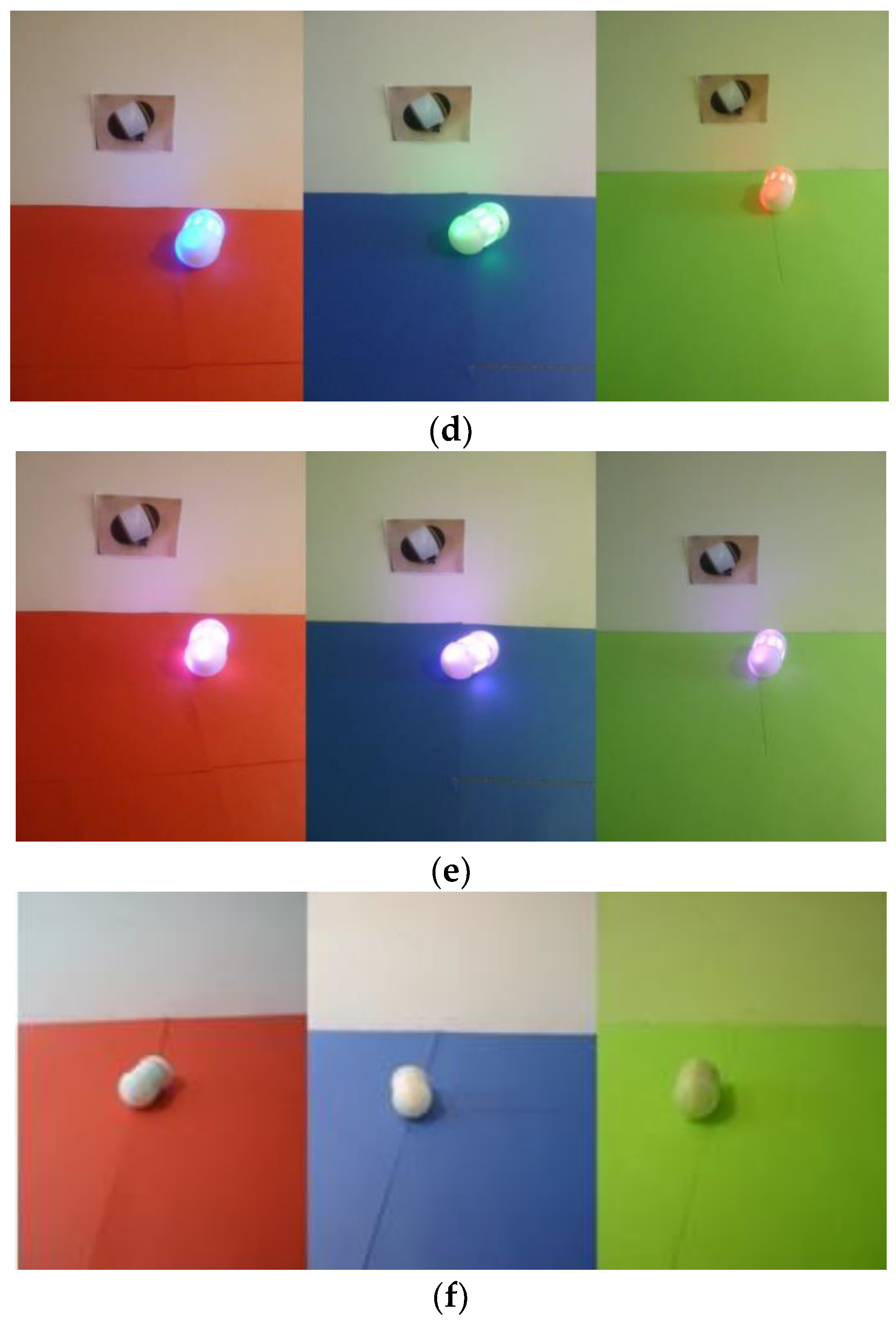
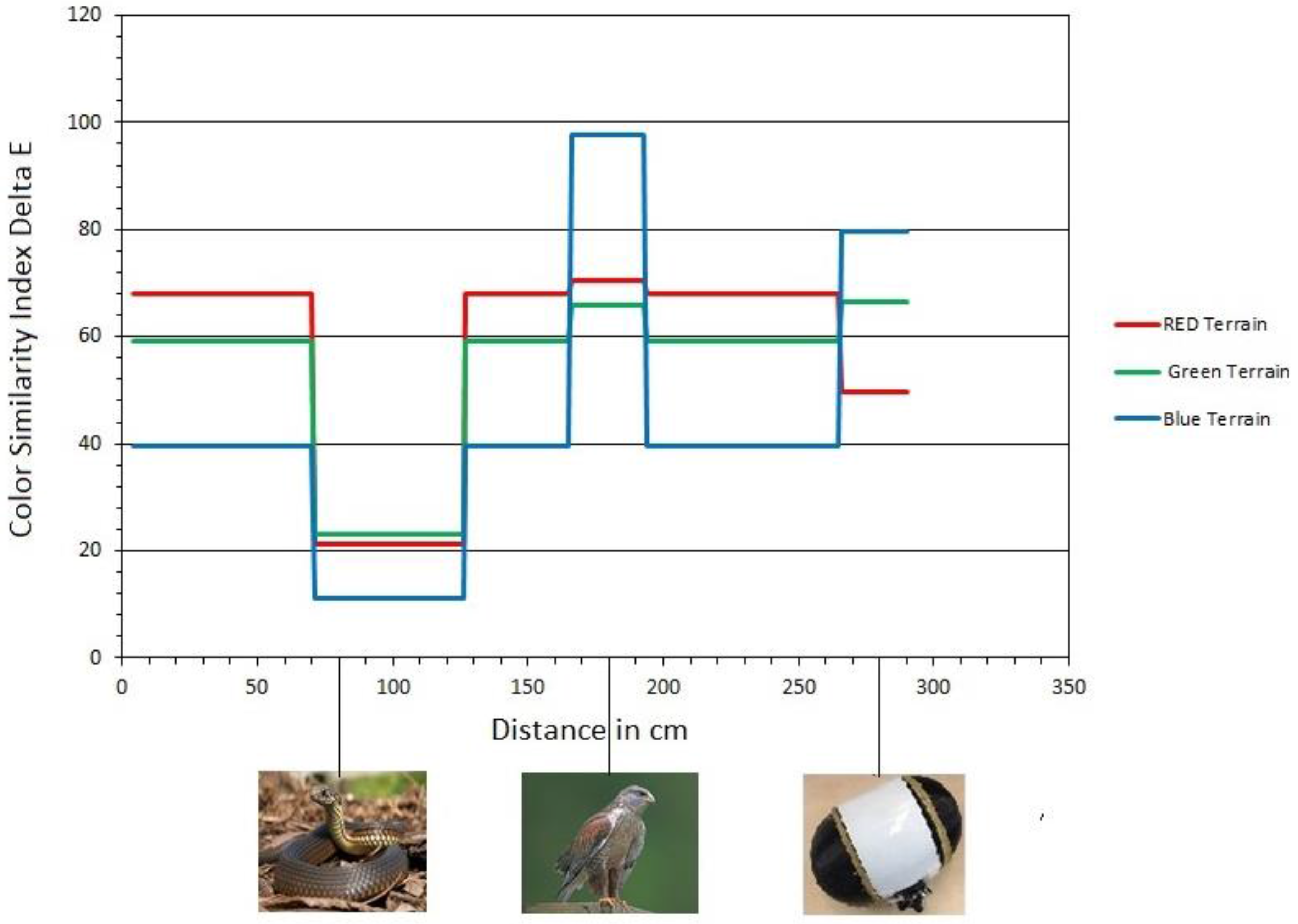
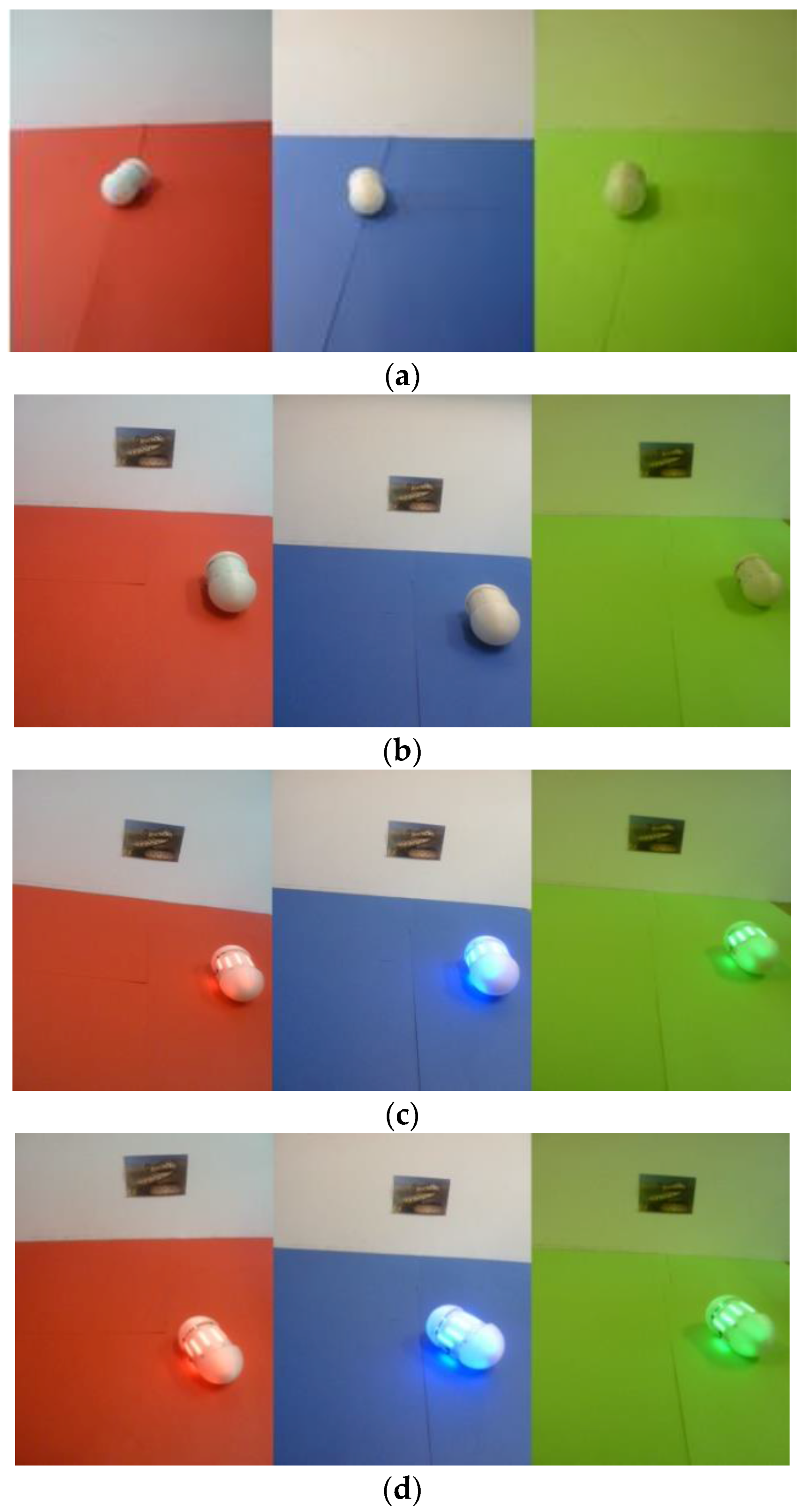
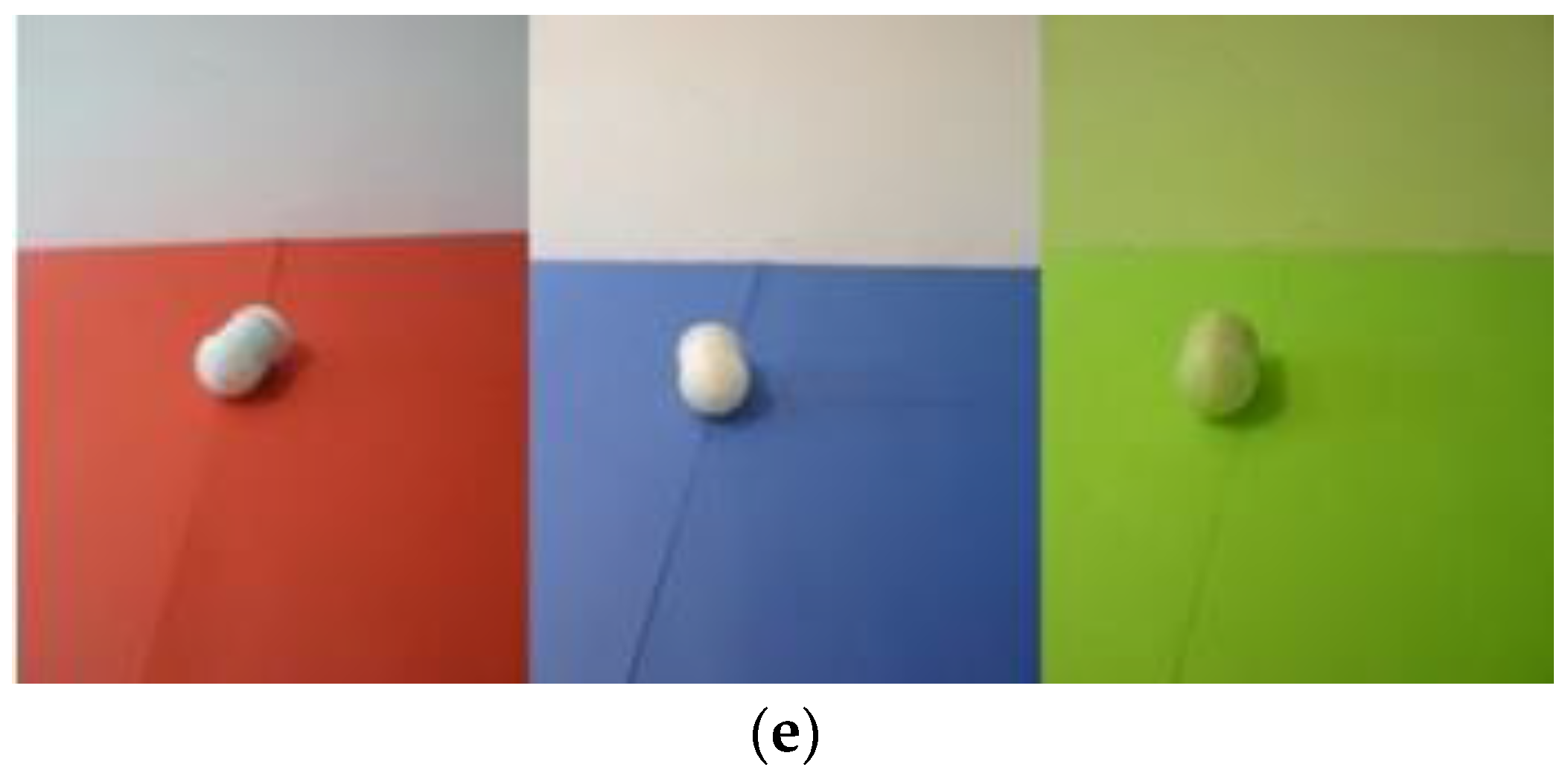
4.1. Chromatic Behaviour Involving Predator Agent
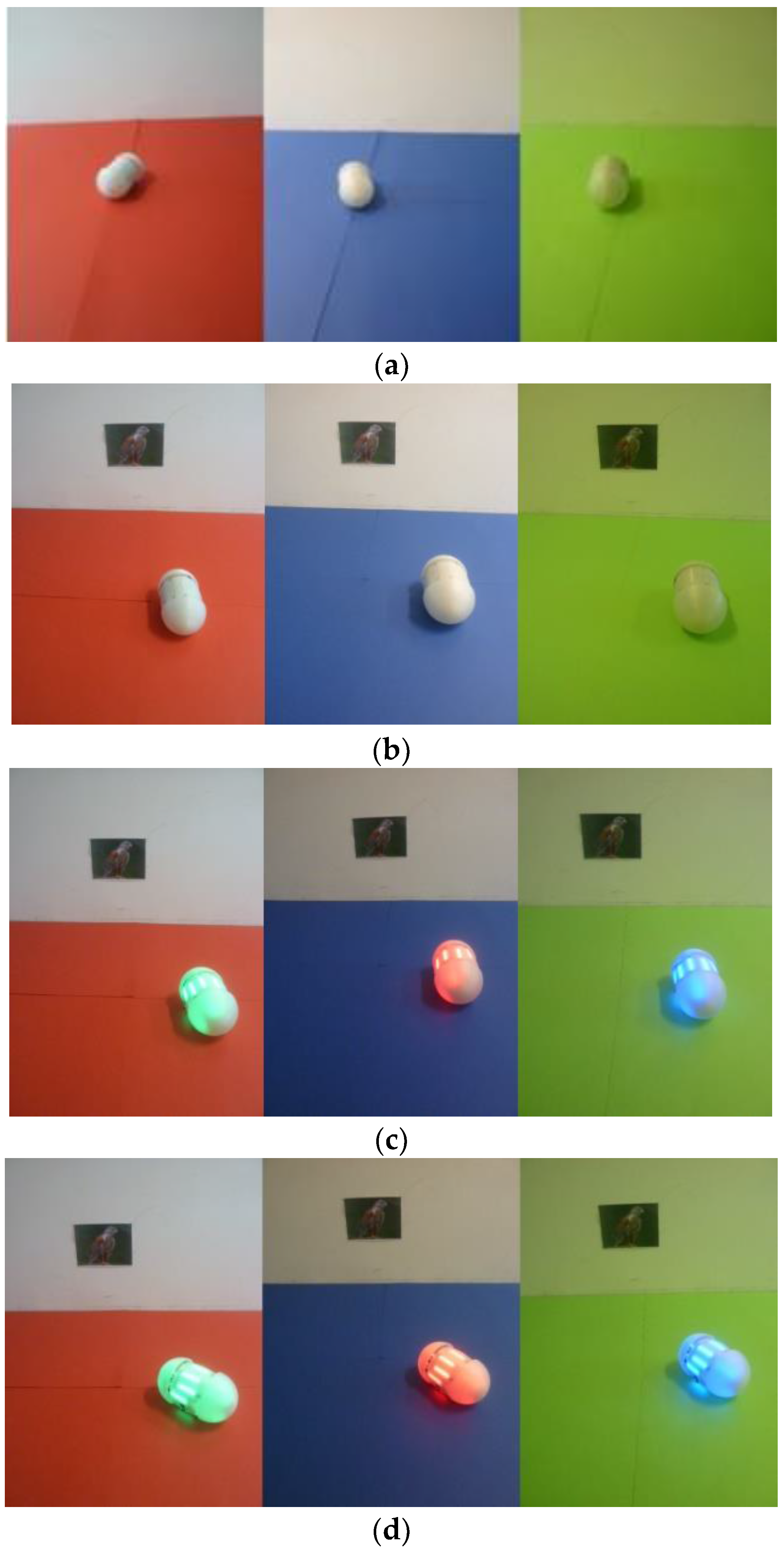
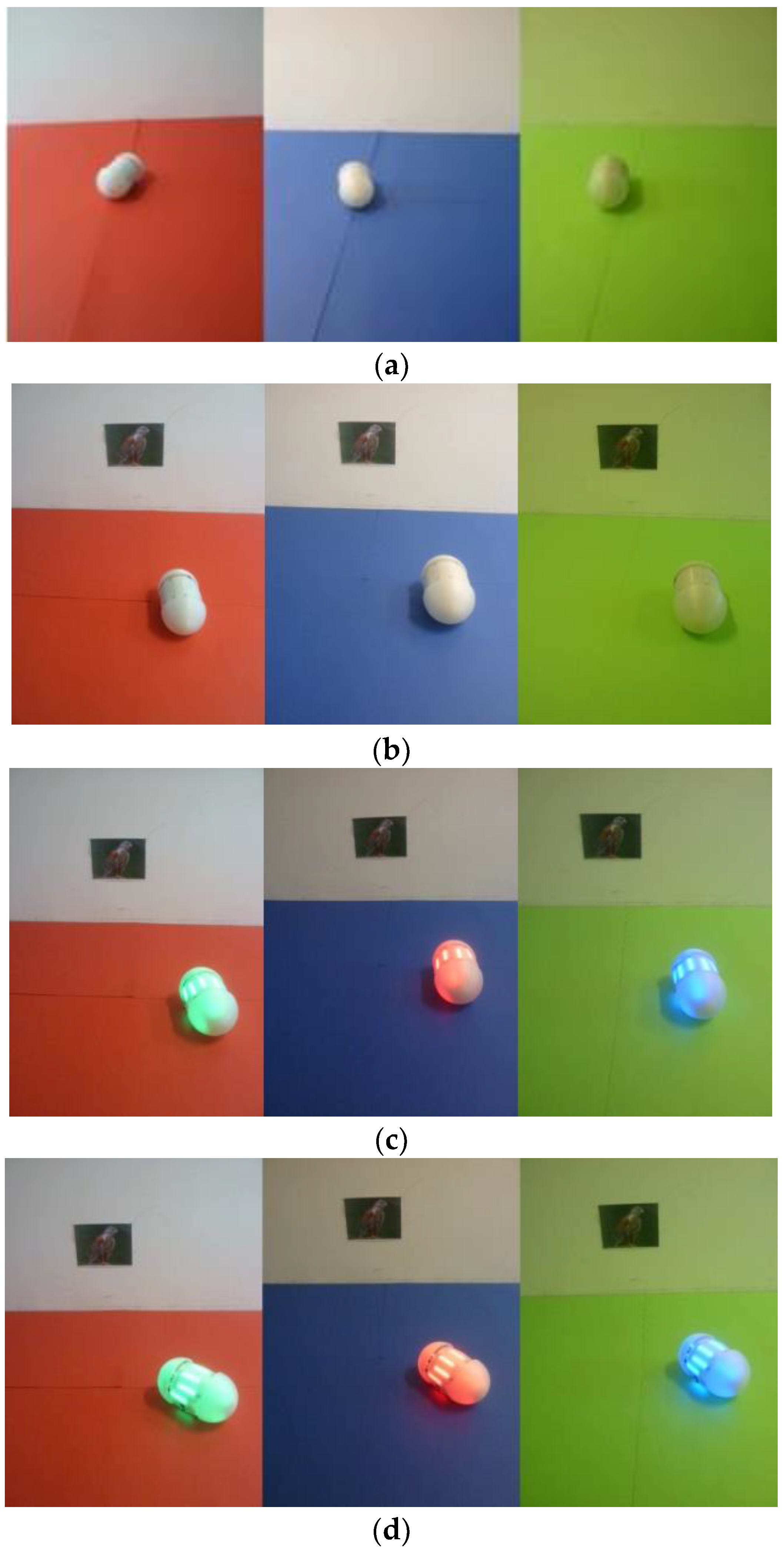
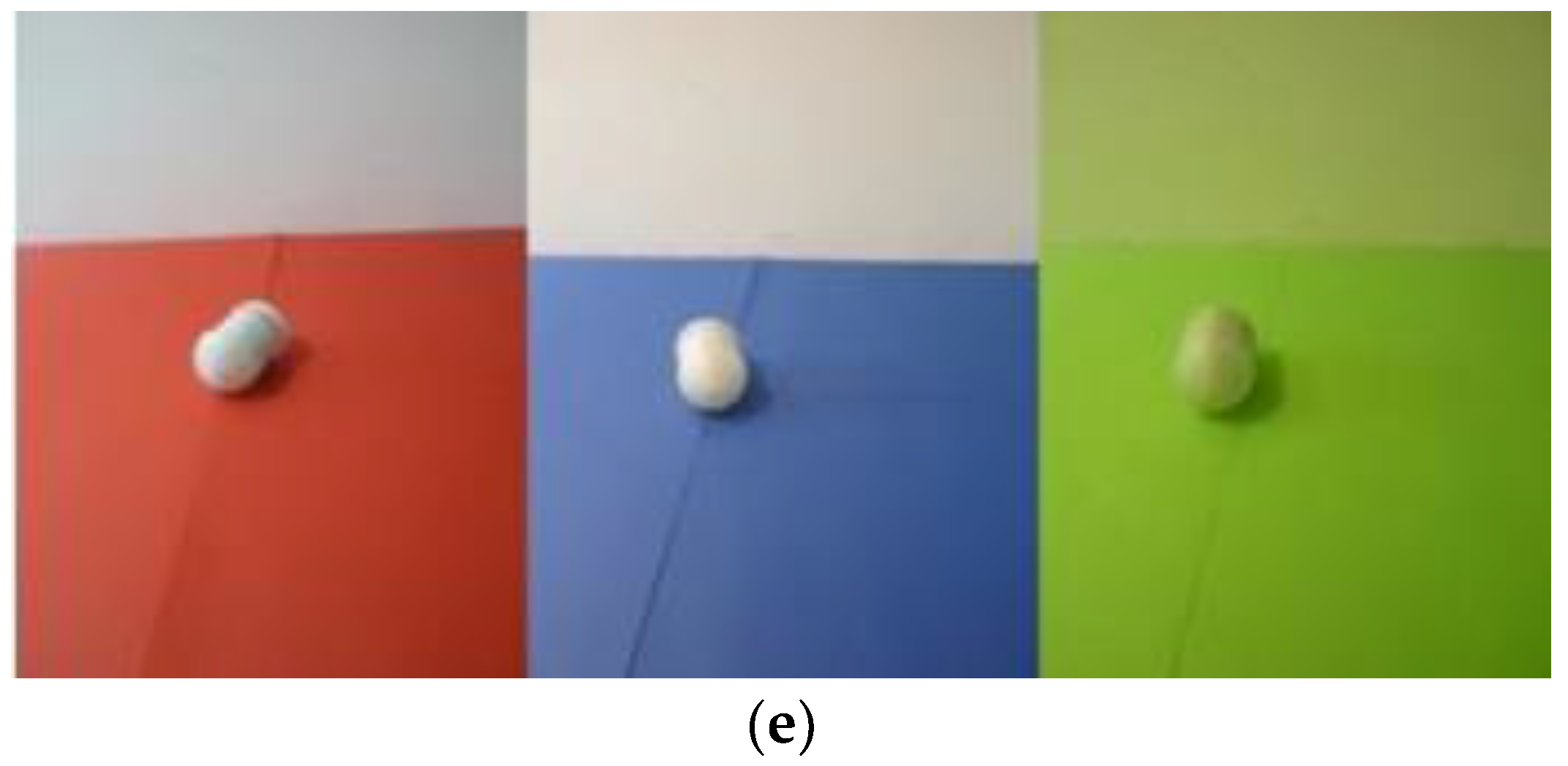
4.2. Chromatic Behaviour Involving a Friendly Agent
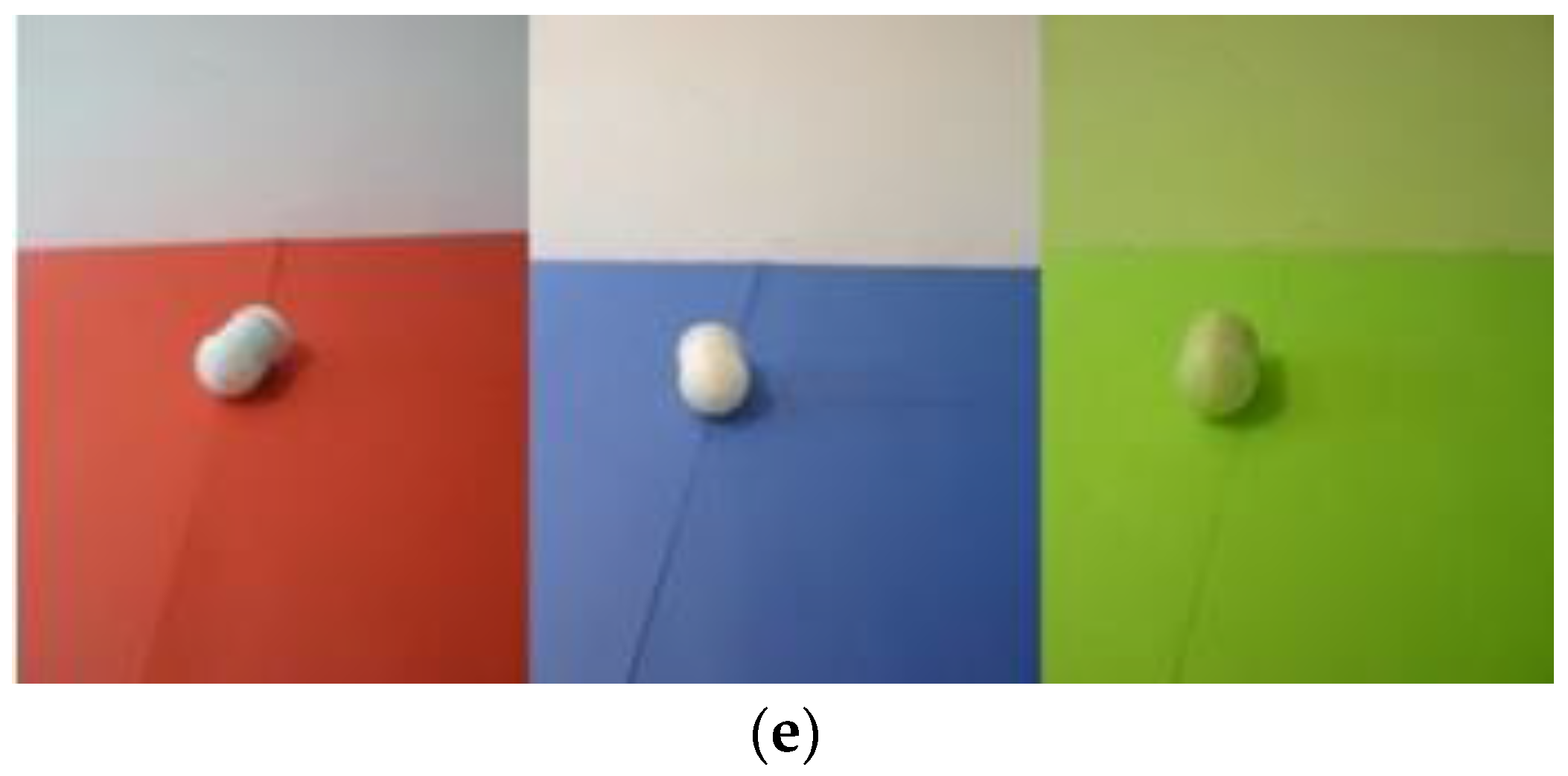
4.3. Chromatic Behaviour Involving Conspecific Agent
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sinha, A.; Ning, T.; Rajesh, E.M. Terrain perception for a reconfigurable biomimetic robot using monocular vision. Robot. Biomim. 2014, 1, 1–11. [Google Scholar] [CrossRef]
- Sheba Jaichandar, K.; Rajesh, E.M.; Edgar, A.M.G. Easiness of acceptance metric for effective human robot interactions in therapeutic pet robots. In Proceedings of the 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 150–155.
- Nansai, S.; Masami, I.; Shoshiro, H.; Mohan, R.E. Observer-based state estimation of snake-like robot with rotational elastic actuators. In Proceedings of the 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 657–662.
- Nemoto, T.; Mohan, R.E.; Iwase, M. Realization of rolling locomotion by a wheel-spider-inspired hexapod robot. Robot. Biomim. 2015, 2, 3. [Google Scholar] [CrossRef]
- Nelson, G.M.; Quinn, R.D.; Bachmann, R.J.; Flannigan, W.C.; Ritzmann, R.E.; Watson, J.T. Design and simulation of a cockroach-like hexapod robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 2, pp. 1106–1111.
- Ijspeert, A.J.; Alessandro, C.; Dimitri, R.; Jean-Marie, C. From swimming to walking with a salamander robot driven by a spinal cord model. Science 2007, 315, 1416–1420. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Liu, W.; Stefanini, C.; Fu, X.; Dario, P. A novel bioinspired PVDF micro/nano hair receptor for a robot sensing system. Sensors 2010, 10, 994–1011. [Google Scholar] [CrossRef] [PubMed]
- Weitzenfeld, A.; Alberto, V.; Horacio, F. A biologically-inspired wolf pack multiple robot hunting model. In Proceedings of the 2006 IEEE 3rd Latin American Robotics Symposium, Santiago, Chile, 26–27 October 2006; pp. 120–127.
- Duncan, B.; Patrick, D.U.; Ronald, C.A. Lek behaviour as a model for multi-robot systems. In Proceedings of the International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 25–32.
- Kettlewell, H.B.D. Insect Survival and Selection for Pattern Most Camouflage and Survival Mechanisms, though highly perfected, can Be Adapted to Changing Environments. Science 1965, 148, 1290–1296. [Google Scholar] [CrossRef] [PubMed]
- Stuart-Fox, D.; Moussalli, A. Camouflage, communication and thermoregulation: Lessons from colour changing organisms. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 463–470. [Google Scholar] [CrossRef] [PubMed]
- Berthier, S. Iridescences: The Physical Colours of Insects; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Barbosa, A.; Lydia, M.M.; Kendra, C.B.; Jennifer, K.; Charles, C.; Chuan-Chin, C.; Roger, T.H. Cuttlefish camouflage: The effects of substrate contrast and size in evoking uniform, mottle or disruptive body patterns. Vis. Res. 2008, 48, 1242–1253. [Google Scholar] [CrossRef] [PubMed]
- Heiling, A.M.; Chittka, L.; Cheng, K.; Herberstein, M.E. Colouration in crab spiders: Substrate choice and prey attraction. J. Exp. Biol. 2005, 10, 1785–1792. [Google Scholar] [CrossRef] [PubMed]
- Kelso, E.C.; Verrell, P.A. Do male veiled chameleons, Chamaeleon calyptratus, adjust their courtship displays in response to female reproductive status? Ethology 2002, 108, 495–512. [Google Scholar] [CrossRef]
- Filshie, B.K.; Day, M.F.; Mercer, E.H. Colour and colour change in the grasshopper, Kosciuscola tristis. J. Insect Physiol. 1975, 21, 1763–1770. [Google Scholar] [CrossRef]
- Taylor, J.D.; Mac, E.H. Chromatophores and colour change in the lizard, Anolis carolinensis. Z. Zellforsch. Mikrosk. Anat. 1970, 104, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Nyssa, S.; Pablo, M. Carapace colour Change in Uca pugilator as a response to temperature. J. Exp. Mar. Biol. Ecol. 2008, 355, 41–46. [Google Scholar]
- Morin, S.A.; Shepherd, R.F.; Kwok, S.W.; Stokes, A.A.; Nemiroski, A.; Whitesides, G.M. Camouflage and display for soft machines. Science 2012, 337, 828–832. [Google Scholar] [CrossRef] [PubMed]
- Miwa, H.; Tomohiko, U.; Takanishi, A.; Takanohu, H. Human-like robot head that has olfactory sensation and facial colour expression. In Proceedings of IEEE International Conference on Robotics and Automation ICRA, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 459–464.
- Terada, K.; Yamauchi, A.; Ito, A. Artificial emotion expression for a robot by dynamic colour change. In Proceedings of the IEEE RO-MAN, Paris, France, 9–13 September 2012; pp. 314–321.
- Hoeller, F.; Achim, K.; Schulz, D. Autonomous reconnaissance and surveillance in urban structures-Eurathlon 2013. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Espinho, Portugal, 14–15 May 2014; pp. 223–228.
- Sampath, K.; Mohan, R.E.; Edgar, A.M.; Roberto, C.A. Designing and experimenting Bio-inspired Chromatic behaviour in Surveillance Robots. In Proceedings of the 10th International Conference on Infroamtion, Communication and Signal Processing (ICICS), Singapore, 2–4 December 2015.
- Cooper, S.K. Chameleons. Natl. Geogr. Explor. 2002, 10, 4–7. [Google Scholar]
- Katz, E.M.; Krystal, A.T.; Res, A. Survival and abundance of Cape dwarf chameleons, Bradypodion pumilum, inhabiting a transformed, semi-urban wetland. Herpetol. J. 2013, 23, 179–186. [Google Scholar]
- Teyssier, J.; Saenko, S.V.; Van Der Marel, D.; Milinkovitch, M.C. Photonic crystals cause active colour change in chameleons. Nat. Commun. 2015, 6, 6368. [Google Scholar]
- Stuart-Fox, D.; Martin, J.W.; Adnan, M. Camouflage and colour change: Antipredator responses to bird and snake predators across multiple populations in a dwarf chameleon. Biol. J. Linn. Soc. 2006, 88, 437–446. [Google Scholar] [CrossRef]
- Ligon, R.A.; Kevin, J.M. Chameleons communicate with complex colour changes during contests: Different body regions convey different information. Biol. Lett. 2013, 9, 20130892. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Rozenn, D. Face components detection using SURF descriptors and SVMs. In Proceedings of the IEEE International Conference on Machine Vision and Image Processing IMVIP08, Coleraine, Northern Ireland, 3–5 September 2008; pp. 51–56.
- Sharma, G.; Wu, W.; Dalal, E.N. The CIEDE2000 colour-difference formula: Implementation notes, supplementary test data, and mathematical observations. Colour Res. Appl. 2005, 30, 21–30. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karutaa Gnaniar, S.K.; Elara Mohan, R.; Martinez-Garcia, E.A.; Ambrosio Lazaro, R.C. Towards Bio-Inspired Chromatic Behaviours in Surveillance Robots. Robotics 2016, 5, 20. https://doi.org/10.3390/robotics5040020
Karutaa Gnaniar SK, Elara Mohan R, Martinez-Garcia EA, Ambrosio Lazaro RC. Towards Bio-Inspired Chromatic Behaviours in Surveillance Robots. Robotics. 2016; 5(4):20. https://doi.org/10.3390/robotics5040020
Chicago/Turabian StyleKarutaa Gnaniar, Sampath Kumar, Rajesh Elara Mohan, Edgar A. Martinez-Garcia, and Roberto C. Ambrosio Lazaro. 2016. "Towards Bio-Inspired Chromatic Behaviours in Surveillance Robots" Robotics 5, no. 4: 20. https://doi.org/10.3390/robotics5040020
APA StyleKarutaa Gnaniar, S. K., Elara Mohan, R., Martinez-Garcia, E. A., & Ambrosio Lazaro, R. C. (2016). Towards Bio-Inspired Chromatic Behaviours in Surveillance Robots. Robotics, 5(4), 20. https://doi.org/10.3390/robotics5040020