1. Introduction
Modular robots present potential robustness characteristics beyond the capabilities of wheeled vehicles, such as: the ability to traverse challenging terrain and insignificant performance degradation when partial damage is inflicted. On the other hand, they lack the emergent intelligence, manoeuvrability and flexibility of swarms. Thus, modular robotic movement and swarming can be viewed as two complementing behavioural traits rather than mutually exclusive ones. In this article, we present a hormone- and emotion-inspired control mechanism for a collective reconfigurable robotic system. The objective of the proposed control mechanism is to decide whether a robotic organism that is deployed for the exploration of an unknown environment will benefit from switching between states of swarming into moving as a single modular robot and
vice versa. Although a single decision at its core, the aforementioned mechanism’s result is a determining factor in a switch between different and conflicting behaviours. Furthermore, the behavioural switching is time-consuming and a determining factor in the success and survival of the robotic organism. Such a decision can not be easily made via a predetermined algorithm or predetermined protocol, because of the environment being unknown, unpredictable and only partially observed by the perception subsystems of the robotic modules. Moreover, the collective decision, of the robotic system as a whole, to switch from a certain type of behaviour into another one when each individual robot makes its own decisions is even more difficult to formulate. Rather, it could emerge as a higher-level property of the complex, non-linear robotic system, as a result of the interaction between the lower-level entities (modules) and the environment [
1]. In terms of the practical application being considered, the work by Berend
et al. is the most related: to design a system that is reliant on online evolution in achieving organism formation via a swarm of robots in order to increase survivability of the robots [
2]. The model presented here relies on offline evolution and is aimed at addressing predetermined objectives. The adaptability of the system is obtained as an emergent property derived from both the interactions (i) between the robotic modules and (ii) between modules and the environment.
Hormone- and emotion-inspired decision models in collective robotics have been developed by various authors to address a range of tasks in the control of a group of robots. The two terms (hormone and emotion) are often used in highly related systems; thus, we consider models from both sources of inspiration relevant and use the two terms interchangeably. The hormone-inspired decision systems model the behavioural effects of emergent emotional changes, due to the hormonal fluctuations that can be observed in biological organisms.
The models developed differ in the style of implementation, as well as the point of view taken on how these hormone-inspired models function. Often, the difference in the modelling comes from whether a low- or high-level point of view is used. In a system where the low-level interactions of hormones and chemical pathways are modelled, the aim is to create a tightly-coupled control mechanism that can define detailed behaviours in a robot. From a different point of view, the fluctuations in hormones are associated with certain emotions leading to high-level behaviours (often used as a behaviour switching mechanism among pre-defined behaviours rather than as a control mechanism). Shen
et al. [
3] present a control model for multiple robot coordination that is based on detailed hormone interactions. Their mechanism, based on Turing’s reaction-diffusion model [
4], defines the coordinated movements of robots via hormone-messages passed between neighbouring robots. Another reaction-diffusion-based complex coordination mechanism is used by Hamann
et al. [
5]. These two mechanisms presented by Shen
et al. and Hamann
et al. behave as detailed coordination mechanisms inspired by the micro-level interactions of the hormones in biological organisms. These mechanisms are designed to be applied as controllers of low-level actions (such as controlling the actuators of wheeled robots) that lead to an emergent higher-level behaviour. Due to the gap between the low-level properties of the micro-entities and the emergent high-level properties of the system as a whole, these mechanisms would be difficult to configure (or evolve).
Utilizing a simpler hormone-inspired decision mechanism limits the flexibility and creativity of the underlying system. However, it drastically simplifies the control models and allows them to be easy to modify, as well as easy to integrate with other control models. Murphy
et al. [
6] achieved multi-robot coordination in a small team of heterogeneous robots using a simple emotion-based control with a limited amount of coding. Moioli
et al. [
7] showed that a simple hormone-inspired approach to task switching in a swarm of robots works well with tasks featuring conflicting objectives (such as exploration and energy preservation). The ALLIANCEarchitecture [
8], as well as a similar approach by Walker and Wilson [
9] also provides simple, yet efficient, behaviour switching mechanisms based on motivations, such as impatience and acquiescence, similar to the hormone-inspired model proposed in our work. Both of these models use continuous broadcasts between robots, since they require the robots to be aware of others’ tasks. This presents problems with scalability, as well as reliability issues as the number of modules in the swarm grows. Although not comprehensive enough to cover all the related hormone-inspired control mechanisms, an analysis of a large number of emotion-inspired mechanisms can be found in [
10]. The proposed hormone-inspired mechanism is similar to the simple behaviour switching mechanisms used by many other authors. The novelty of our approach is in its area of application, integration, as well as its implementation.
The proposed decision mechanism is inspired by the fluctuations in the hormonal signals of biological organisms that cause changes in the emotional states, which, in turn, determine the actions for many crucial decisions. Our work is inspired by the drastic behavioural fluctuations often observed in biological organisms, due to the changes in hormonal regulators [
11]. We propose an automated design of the decision mechanism via simulated evolution, because we believe that an
a priori hand-coded solution would not be adaptable, due to the unknown and unpredictable nature of the environment. Moreover, such a solution would not be an optimal one, due to the inherent complexity of the modular robotic system. Indeed, the analytical models for such complex, modular robotic systems do not exist, and often, the desired high-level properties of the system as a whole cannot be directly inferred from the hand-coded low-level behaviour and morphology of its entities. We use XML-based Genetic Programming (XGP) for the evolution of the control mechanism (Tanev [
12]). The evolved model is intended to decide the timing of switching between the swarming and snake-like locomotion behaviours, and
vice versa. Both behaviours were developed in our earlier works [
13,
14]. The task is for a group of robots that approach a corridor as a swarm to overcome the various obstacles presented and explore as much of the area as possible in the process. The experiments demonstrate the intuitive behaviour achieved by the robots as a group by switching among the main behaviours (swarming, modular robot reconfiguration and movement) via the use of the presented hormone-inspired decision mechanism.
This article is organized as follows. In
Section 2, we describe the adopted robotic modules and their simulated environment.
Section 3 details the algorithms executed for all three behaviours that the robotic system can perform.
Section 4 explains the decision mechanism designed for switching among various behaviours (described in
Section 3). In
Section 5, we describe the experimental setup and present the empirical results obtained from the hand-tuned version of the hormone-inspired algorithm. In the same section, we provide the values of the major parameters of XGP and the results obtained by the simulated evolution.
Section 6 provides a comparative analysis on the results, presented in the preceding section, and
Section 7 draws a conclusion of our work.
2. Robots and Their Environment
We use the commercially available robot simulation platform, Webots, in our experiments, which realistically models the physics of the adopted mobile robots, their interactions with each other and with the environment [
15].
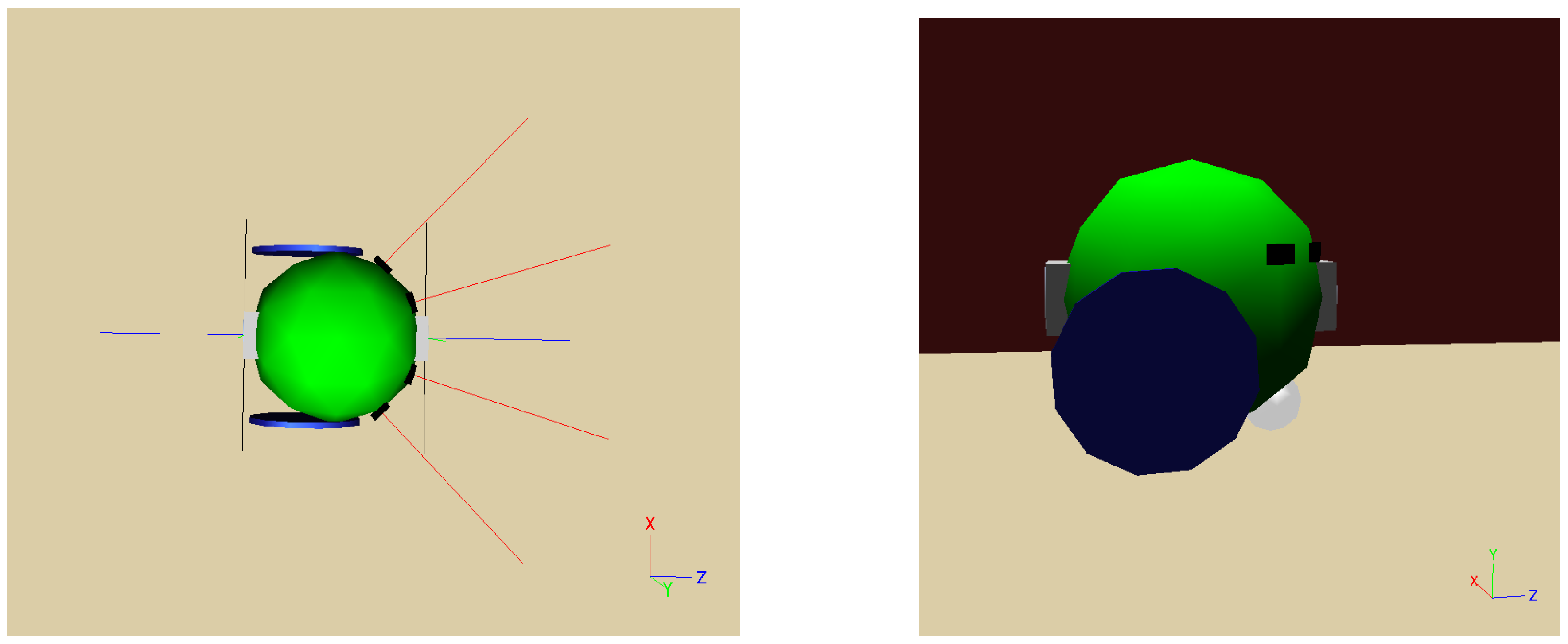
Table 1 details the parameter settings used for the Webots simulation platform. The robots are spherically shaped two-wheeled robots with a differential drive and
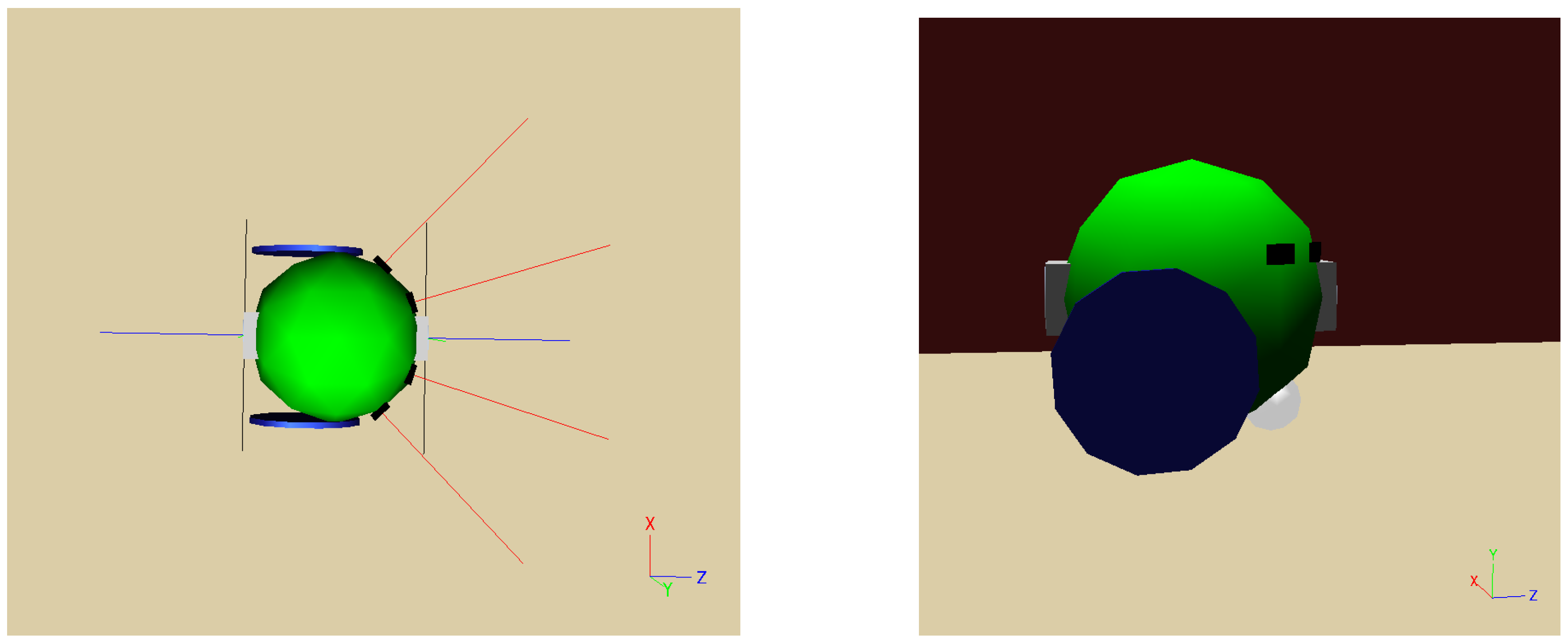
in size. Robots feature a set of a simulated radio emitter/receiver and four infra-red (IR) sensors in front, as shown in
Figure 1. The radio emitter and receiver set allow the robots to establish direct one-to-one and one-to-many communication with other robots. The radio communication models a simple RFmodule with a custom communication protocol,
i.e., without a known communication protocol, such as WiFi or Zigbee. The robots are equipped with two actuators—one in front (vertically oriented) and one at the back (horizontally oriented)—which have magnetic connectors attached that allow them to connect with other robots. The front actuator has an “active” connector (an electromagnet) that can be activated or de-activated by the robot. The rear actuator has a “passive” connector (a permanent magnet), which is always in the same state and can only be connected with an “active” type connector (since two passive connectors have the same polarity). Thus, the robot that is connecting with its “active” (front) actuator has the initiative in establishing a robot-to-robot connection.
Table 1.
Webots related parameters of the simulated robots.
Table 1.
Webots related parameters of the simulated robots.
| World Properties | Robot Physics Properties |
|---|
| CFM | 0.00001 | density | −1 |
| ERP | 0.2 | mass | 0.1 |
| basicTimeStep | 32 | centerOfMass | 0 −0.03 −0.031 |
| bounce | 0.5 | bounce | 0.5 |
| bounceVelocity | 0.01 | bounceVelocity | 0.01 |
| coulombFriction | 0.5 | coulombFriction | 1 |
| forceDependentSlip | 0.004 | forceDependentSlip | 0 |
| runRealTime | true | | |
The robots are designed to reflect a realistic size of a robot with similar capabilities (e.g., epuck, Symbrion robot [
16]). They are aimed at being capable of forming a swarm of wheeled robots and achieve common tasks, such as exploration of unknown environments. The robots are also designed to substitute the spherical modules used in the sidewinding Snakebots in our earlier work [
17]. The latter is the reason why the robots have a spherical casing. The robots here do not use ball joints as before (due to the limitations of the Webots simulation platform), but utilize two separate joints.
Figure 1.
The differential-wheeled robot used in simulation experiments with four infra-red (IR) sensors of range pointing forward and two connection points that allow docking with other robots.
Figure 1.
The differential-wheeled robot used in simulation experiments with four infra-red (IR) sensors of range pointing forward and two connection points that allow docking with other robots.
4. Hormone-Inspired Behavioural Switching Based on Patience
The decision to switch states (disconnect from a modular robot and join a swarm or start forming a modular robot while swarming) is made on an “impatience” value that the robots increase or decrease depending on the environmental factors. This is modelled after the biological organisms, namely animals, which maintain emotions, such as anxiety, tolerance, restlessness and eagerness, that contribute to large changes in behaviour via hormonal feedback in their bodies. Hormones in biological organisms are known to achieve coordination amongst different members and are a determining factor for social behaviours [
11]. We are inspired by this duty of hormones in biology and believe that a similar decision mechanism could provide intuitive changes in robotic behaviour. Here, we provide a simplistic model of a hormone, where we do not try to provide a biologically-plausible implementation. The main source of inspiration is not how the hormonal chemical networks work in biology, but the situational uses (
i.e., behavioural switching) of slow, but smooth, chemical gradients instead of fast and sharp logical decisions. The model presented provides some of the basic functions of a hormonal network in biological organisms, namely: (i) storage and secretion of hormones; (ii) recognition and processing of the hormone; and (iii) degradation of the hormone. The hormones in our model are not transported to other “cells”, since they are used in the regulation of a single-cellular entity (
i.e., the individual robot) that does not share its hormonal state with other robots. However, the resulting behavioural shifts in a robot are shared with other members of the group, which affects the status of the other individuals. Thus, the hormones produced indirectly control the behavioural state of the whole group.
The impatience value used to model the behaviour of hormones has a certain range, and it constantly degrades over time (multiplied by
every time step in the presented experiments), even when not in use. The production (secretion) of the impatience value is determined by a separate logic (hand-coded or evolved), which only controls the incremental changes in the value of the impatience value, as elaborated in
Section 5. We define a threshold level for the impatience value, and if this value is reached, an action takes place depending on the robot’s state. If the impatience value is high enough to initiate an action, it is reset to zero (
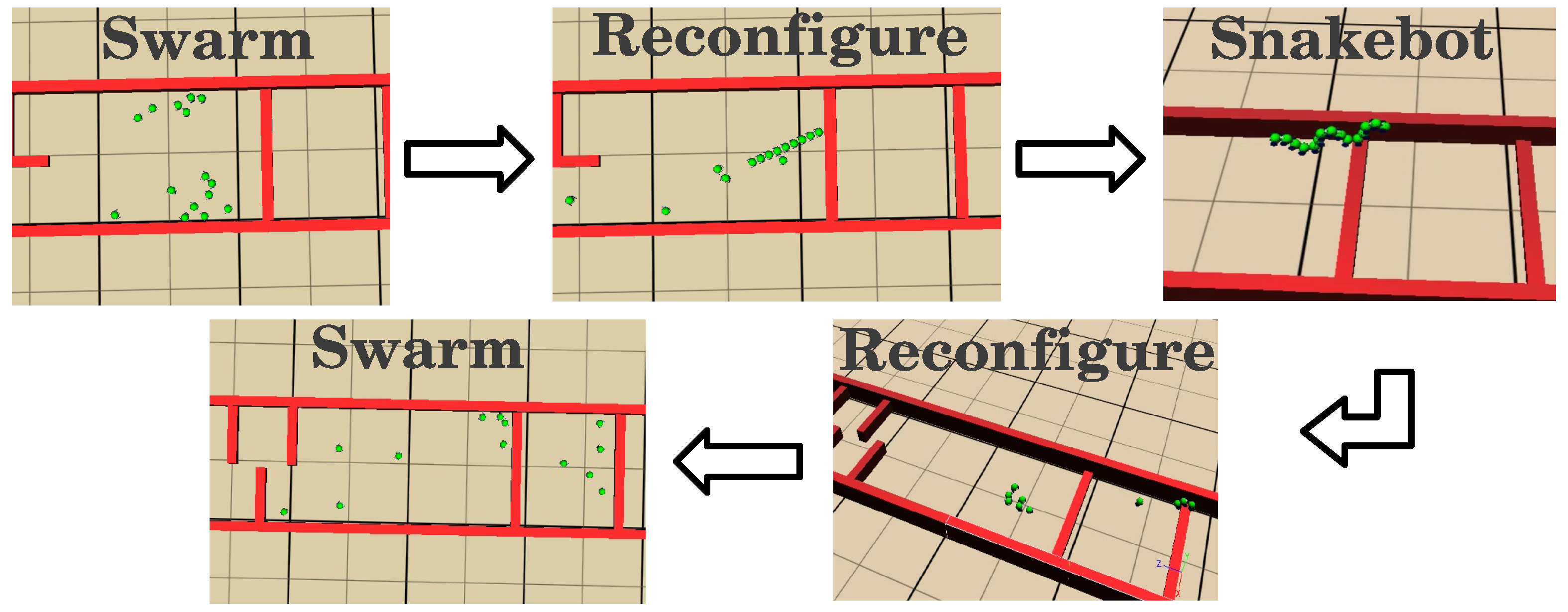
i.e., it is “consumed”). The three major behaviours described in
Section 3 define the states that a robot can be in. We spread these three behaviours to a total of five states:
State 0 is swarming only,
State 1 is Snakebot locomotion only,
State 2 is swarming, but ready to join a Snakebot,
State 3 is initiate reconfiguration for a Snakebot and
State 4 is docked and looking for other robots to form a Snakebot. The three behaviours are spread over five states in order to simplify the reconfiguration process and the integration of the three distinct behaviours and encourage gradual change in behaviours rather than abrupt switching. For the experiments presented in
Section 5, the robots are initialized in State 2. The decision mechanism determines the changes between these states that place the robot in a different behavioural zone. When a change in state is triggered, the state transitions are as follows: State 0 –> State 2; State 2 –> State 3; states 1, 3 or 4 –> State 0.
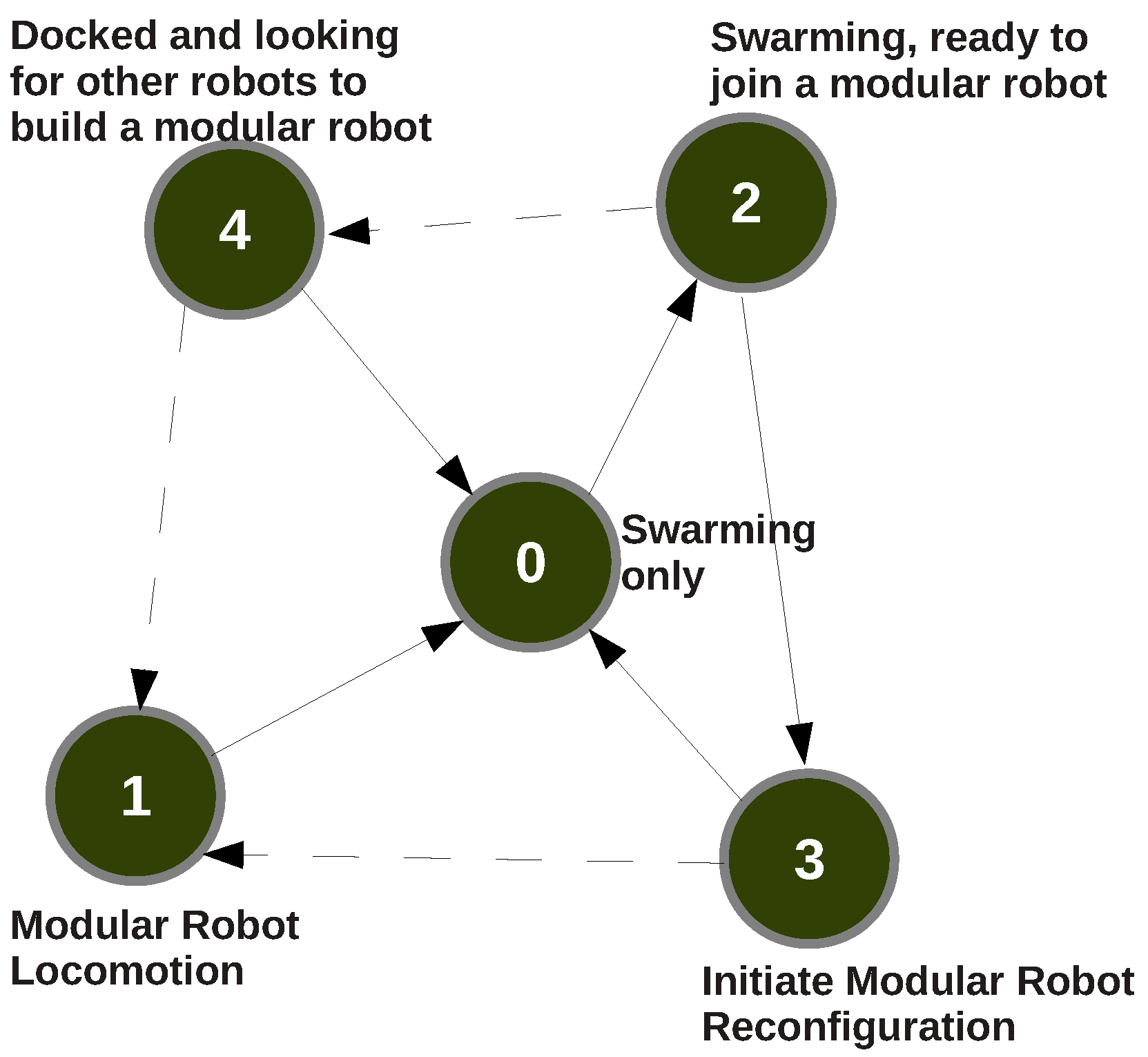
Figure 3 illustrates the state machine built to accomplish the desired behaviours, with the aforementioned five states.
Figure 3.
The states and the possible transitions in the main controller of the robots. The solid lines illustrate the state transitions, due to the decisions made by the hormone-inspired behaviour switching, whereas the dashed lines represent the state transitions, due to changes in the environmental conditions.
Figure 3.
The states and the possible transitions in the main controller of the robots. The solid lines illustrate the state transitions, due to the decisions made by the hormone-inspired behaviour switching, whereas the dashed lines represent the state transitions, due to changes in the environmental conditions.
These states and the state transitions define the behaviours and the order of change between these behaviours, which are easy to define. The most difficult task, however, is to decide when to initiate these state transitions.
Table 2 shows a list of variables that each robot has access to and we believe are sufficient for the robots to analyse their environments and adjust their internal states. All these variables are either acquired without any communication or via the existing communication taking place among the robots during the reconfiguration procedure.
Table 2.
Perception information available to each robot relevant for determining the change in the impatience value.
Table 2.
Perception information available to each robot relevant for determining the change in the impatience value.
| Perception | Description |
|---|
| lowestPH | Value of lowest pheromone conc.requests |
| No. largestModuleSize | No. of modules in the largest active Snakebot. |
| moduleImpact | |
The pheromone levels, which are stored by the environment, provide information to individual robots about the environment and whether the goal of exploration is being satisfied [
14]. The
,
and
are affected by the behavioural state of the other robots in the environment. These variables inform the individual robots about the state of the other robots and create the means for social monitoring and pressure. Thus, the hormonal changes within the other robots have the possibility to cause hormonal changes within.
5. Experiments
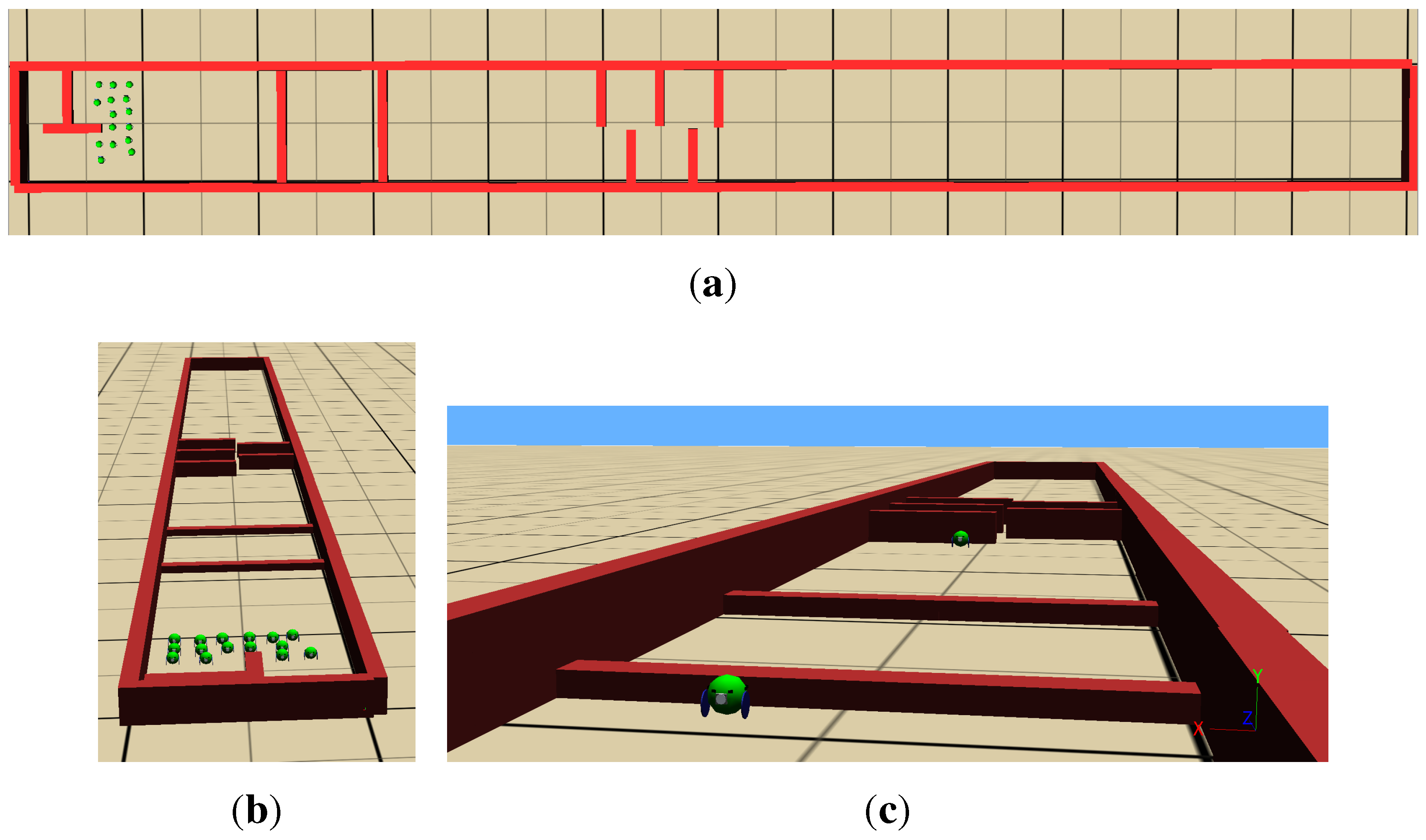
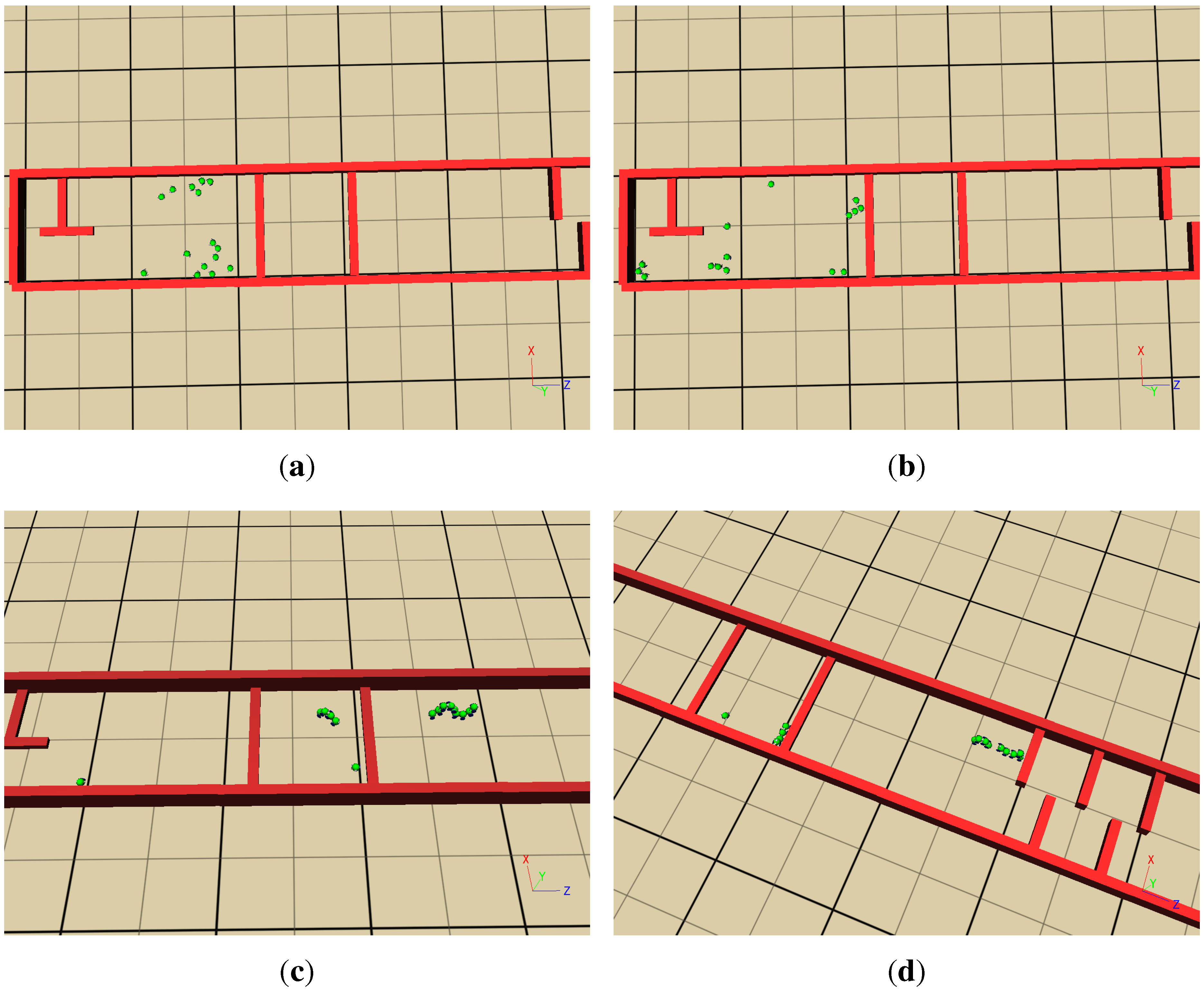
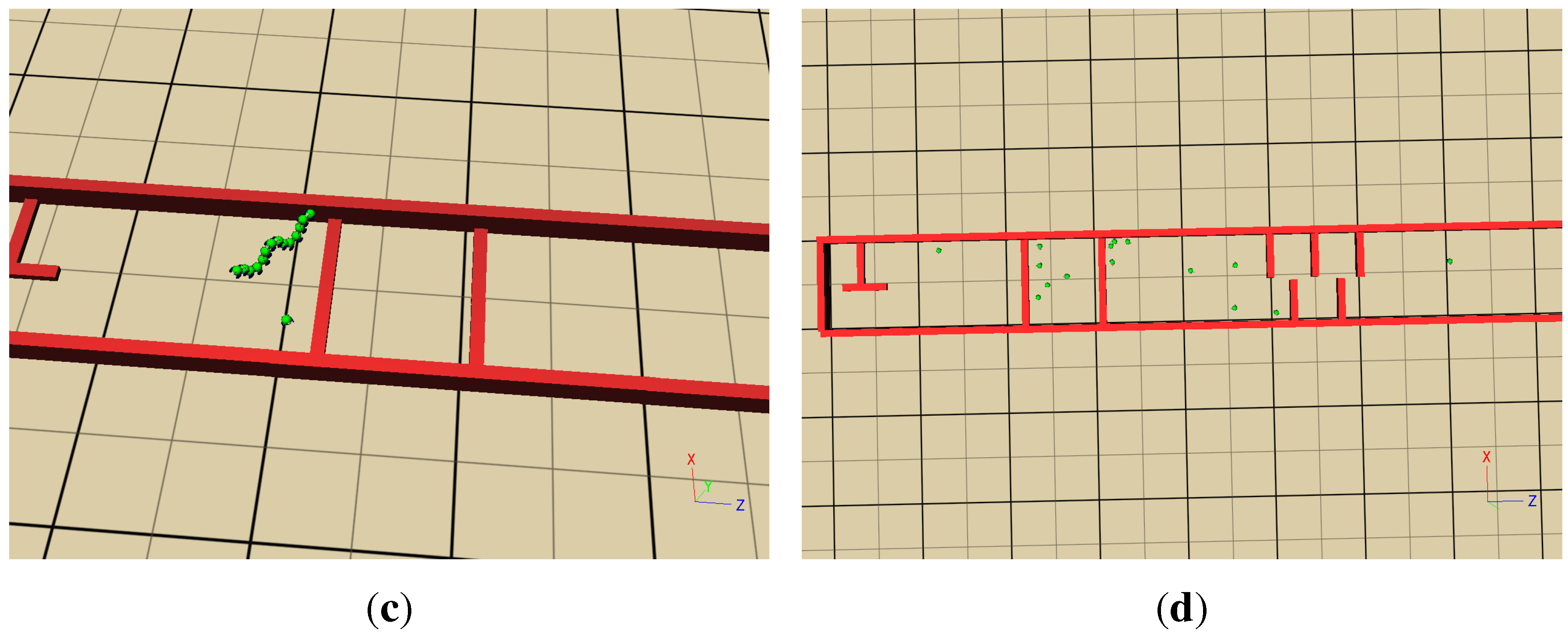
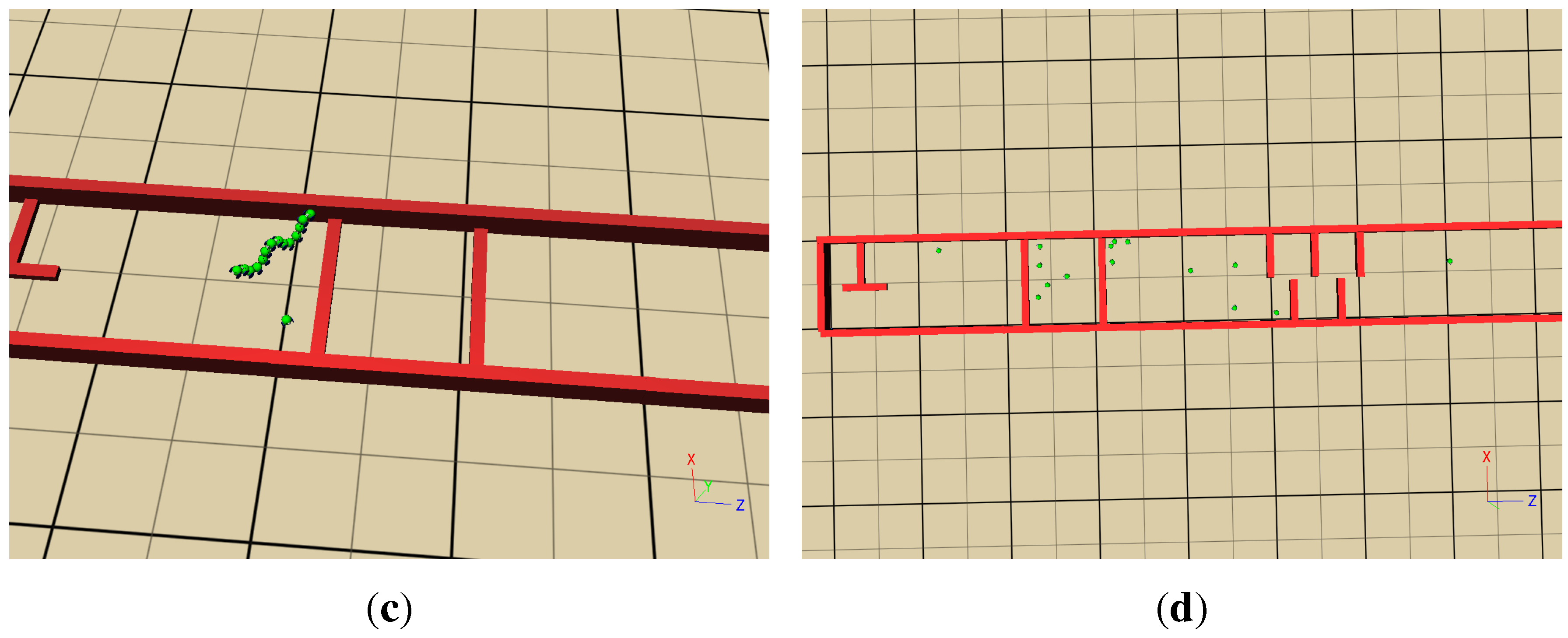
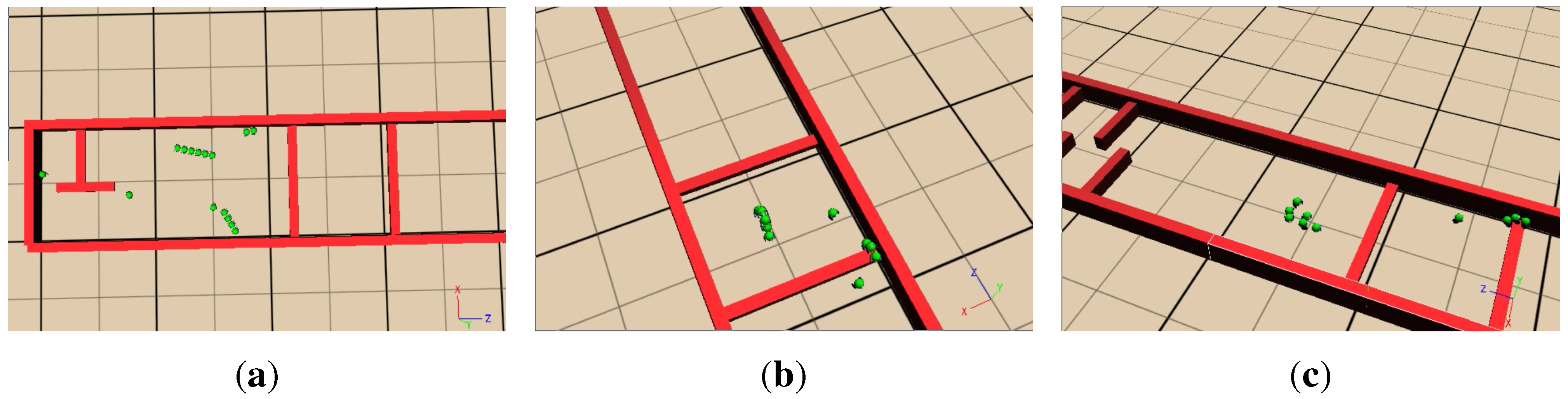
An experimental environment is designed to develop and test the decision mechanism for its ability to provide efficient and intuitive switching between behaviours in order to accomplish quick exploration of unknown areas. The environment is designed to test the ability of the robotic group to demonstrate all three behavioural states to successfully explore a given environment without any information about the area. The environment is a long corridor (
) with two types of obstacles: low continuous walls and high walls with gaps. The low walls present a challenge to individual robots, which are too small to overcome these obstacles, but these low walls can be climbed over by a Snakebot. The high obstacles cannot be overcome by either the individual robots or a Snakebot. However, the high obstacles are arranged to have small offset gaps that give individual robots the opportunity to circumnavigate.
Figure 4 provides different views of the environment.
Fifteen robots are initialized at the left end of the corridor as a swarm. The goal for the robots is to clear all the obstacles in the way and explore as much of the environment as they can. The robots are expected to explore this section as well as they can before joining together to overcome the low obstacles blocking their way. Once formed, the modular robots that overcome the low obstacles are expected to partially disassemble after the first low obstacle, while the rest disassemble when they reach the high obstacles, where they can no longer move forward. The disconnected individual robots that reach the high obstacles are then expected to find their way to the other side of these high obstacles. This requires the robots to form a Snakebot and then go back to being a swarm at least once.
We use a simple hand-coded algorithm shown in Algorithm 1 to successfully clear all the obstacles shown in
Figure 4 with appropriate task switching in approximately
min. Different behaviour control patterns can be obtained by adjusting the constants used for the impatience increment, as well as the constant values,
,
and
. The values used for the latter three in our experiments are 600, 100 and 1, respectively. The constants are picked and optimized via numerous trial and error runs in the experimental environment. For example,
is set to 600, as this is the commonly encountered minimum pheromone concentration surrounding a robot in an already explored area. In cases where a smaller value is detected, the area is likely to be only partially explored, and for higher values, there is a chance of long delays in behaviour switching, even after the area is fully explored (thus, 600 is picked as a sub-optimal compromise). The value of the impatience increment in the case of high pheromone levels is set to 2, which is not a large enough increase to bring the impatience levels high enough (50) to trigger a change in behaviour, since the impatience value is multiplied by
every time step (thus, the maximum impatience value attainable is
). Most of the other sub-conditions under the initial condition (of high pheromone values or requests) increase the impatience value with larger increments of
. In these cases, a quick change in behaviour is required, and we aim to bring them about with large increments. The latter is not true for the first condition, which checks if the robot is part of a moving modular robot. In this case, the increments are made in significantly smaller values (
, which means that the maximum value impatience can reach is
) in order to allow the Snakebot the opportunity to move when it is first formed. By the time the newly formed modular robot can start moving, the impatience value is already high (
i.e.,
); thus, using a large increment value would cause the Snakebot to disassemble before it can start to move.
Figure 4.
The experimental environment viewed from three different positions.
Figure 4.
The experimental environment viewed from three different positions.
| Algorithm 1 The hand-coded algorithm for controlling behaviour changes by adjusting the impatience value. |
if or then if and then else if ( or or ) and then else if and then else if and then end if end if
|
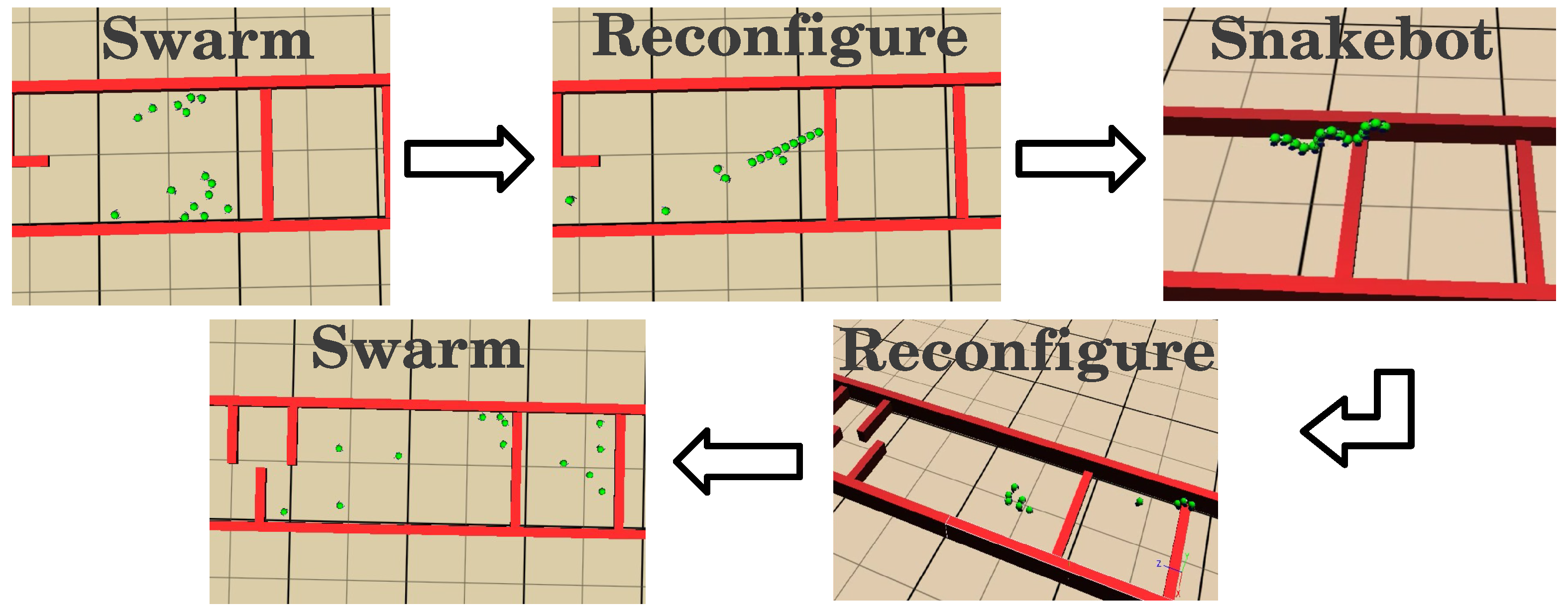
An example run in the environment shown in
Figure 4 with 15 robots is illustrated in
Figure 5.
As mentioned earlier, it takes a total of min for the first robot to clear all the obstacles. The algorithm is written to ensure that there is only one robot initiating the configuration of a Snakebot. Although the latter ensures that the Snakebot formed is as large as it can be to have the best chances of overcoming the obstacles, it is time-consuming, and the configuration process takes more than three minutes. The amount of time it takes for the first robot to clear all the obstacles can be reduced by allowing two robots to initiate the Snakebot configuration process (by setting to 2). In the latter case, the first robot clears all the obstacles within 5 min. However, neither of the Snakebots disassemble between the two low obstacles; thus, that area remains unexplored. If, however, the number of robots that can initiate the Snakebot configuration process is set to 3 or more, no Snakebots that can cross the low barriers form (they are too small); thus, none of the robots can clear the obstacles.
Figure 5.
Snapshots of a run using the hand-crafted Algorithm 1. (a) 10 s; (b) 1 min 18 s; (c) 4 min 20 s; (d) 4 min 35 s; (e) 5 min 3 s; (f) 7 min 33 s.
Figure 5.
Snapshots of a run using the hand-crafted Algorithm 1. (a) 10 s; (b) 1 min 18 s; (c) 4 min 20 s; (d) 4 min 35 s; (e) 5 min 3 s; (f) 7 min 33 s.
We believe that this is a well-fitting problem for GP, as it only involves 4 perception inputs and a single output; yet, it is a difficult problem to solve using hand-coded logic without any map-specific information. The mechanism of incrementing the impatience value that yields a desired behaviour of the robotic system as a whole is not obvious. The changes in behaviours need to be well synchronized amongst the robots in order to prevent fruitless oscillations between their respective states. By utilizing XGP, we intended to evolve the optimal mathematical model of the conditions that can trigger the transitions among a large group of robots to overcome the obstacles in order to successfully explore their environment. The population of XGP includes 200 individuals with an elite size of 10 individuals. To create the remaining 190 individuals of a new generation, we employ a binary tournament selection: two individuals are picked at random. Ninety-percent of the time, a new individual is created via single point crossover (reproduction), and
of the time, the fittest of the two is chosen to be passed on to the next generation. The crossover point is randomly selected within the genotype. The mutation randomly alters
of the newly created individuals (all except the elites). Each run lasts 40 evolutionary generations.
Table 3 illustrates the main parameters of XGP. The set of terminal symbols of XGP consists of the four perception values (as shown in
Table 2), the randomly generated floating point constants of [0..1], and the integer constant of [0..100]. The function set consists of the mathematical operations, addition, subtraction, multiplication and division.
The genotype of the individuals in XGP is represented as parse trees. These threes are evolved to increment the impatience value in order to trigger beneficial state changes in various environmental conditions. Each individual is evaluated for 1,000 s in the Webots simulation platform, which roughly corresponds to 5 min of a real-time run of the simulation platform on average. Each experiment involves 15 robots, with a homogeneous breeding strategy in that each robot is controlled by the same individual of XGP being evaluated. The fitness of each individual is determined by the number of checkpoints visited and the number of robots that clear all the obstacles. Checkpoints are placed every 25 cm in the environment, and they are meant to encourage exploratory behaviour, as well as prevent an over-fit solution to overcoming the obstacles in the corridor (
i.e., filter out the solutions that start reconfiguration to form a modular robot before any exploration is done). The fitness value is evaluated according to Equation (
2).
Table 3.
Main parameters of XML-based Genetic Programming (XGP).
Table 3.
Main parameters of XML-based Genetic Programming (XGP).
| Category | Value |
|---|
| Genotype | Impatience increment (parse tree) |
| Population Size | 200 individuals |
| Selection | Binary tournament selection; ratio: 0.1 |
| Reproduction ratio: 0.9 |
| Elitism | 10 individuals |
| Mutation Rate | 0.02 |
| Trial Interval | 1,000 simulated seconds |
| Termination Criteria | No. of generations = 40 |
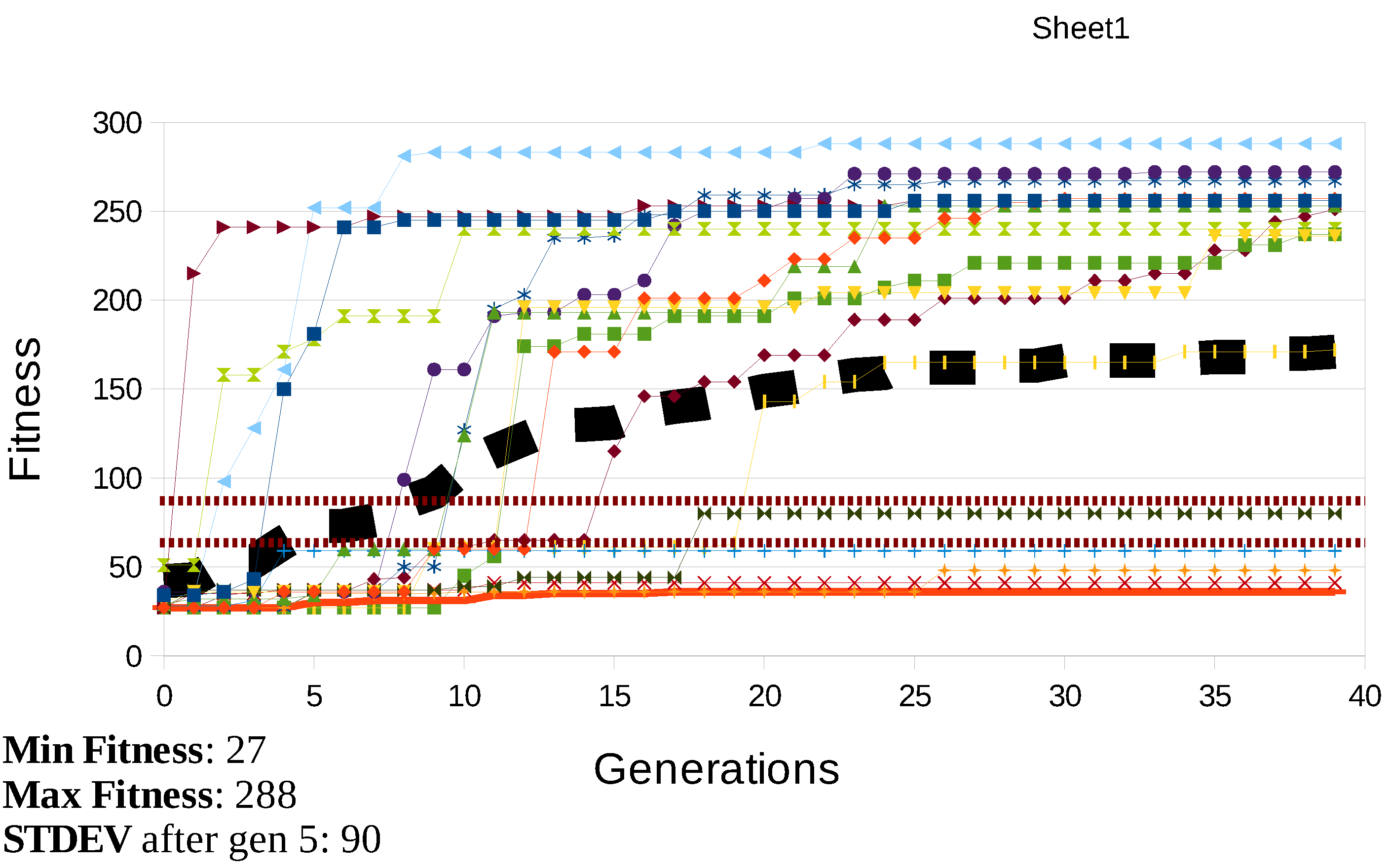
After a total of 20 independent evolutionary runs, various successful control mechanisms evolve that can achieve the desired behaviour.
Figure 6 shows the average fitness convergence over the 20 evolutionary runs. In 10 of the runs, the robotic system, controlled by the evolved mechanism of reconfiguration, was able to clear all the obstacles in the experimental environment. Out of the 10 successful runs, 6 provided robust solutions, where the re-runs could achieve good results. The reason for the latter is the over-fitting of the environmental conditions created during the evolutionary runs. Although half of the evolved controllers were able to cross both the low and high obstacles, only two got stuck at the tall obstacles, 1 got stuck in between the low obstacles and the rest could not cross the low obstacles. We can conclude that the successful formation of a Snakebot in time to cross the low obstacles was the major crux of the problem for evolution.
We expected to obtain a control mechanism that can form a single Snakebot from all 15 modules to carry them over the two low obstacles and then disassemble when the high obstacles are encountered. Although such control mechanism emerged, the most common evolved behaviour was the formation of multiple Snakebots (mostly two or three Snakebots) to overcome the obstacles. The latter was implicitly favoured by evolution, due to the gains in speed in carrying the robots over the obstacles, which allowed them a longer time to explore the much larger area beyond the high obstacles. By having multiple Snakebots configured at the same time, not only the reconfiguration process was parallelised, but also the problem with narrowing spaces behind the large Snakebots that slow down the docking robots were alleviated. Furthermore, the formation of multiple robots is a more robust approach, since the Snakebots are prone to falling over (which immobilizes the Snakebot) when using the rectilinear locomotion. In the case of a single Snakebot, this meant that the robots are unable to cross the low obstacles if the Snakebot falls over shortly after they are formed, whereas, in the case of multiple Snakebots, there is a smaller chance of all of the modular robots toppling over.
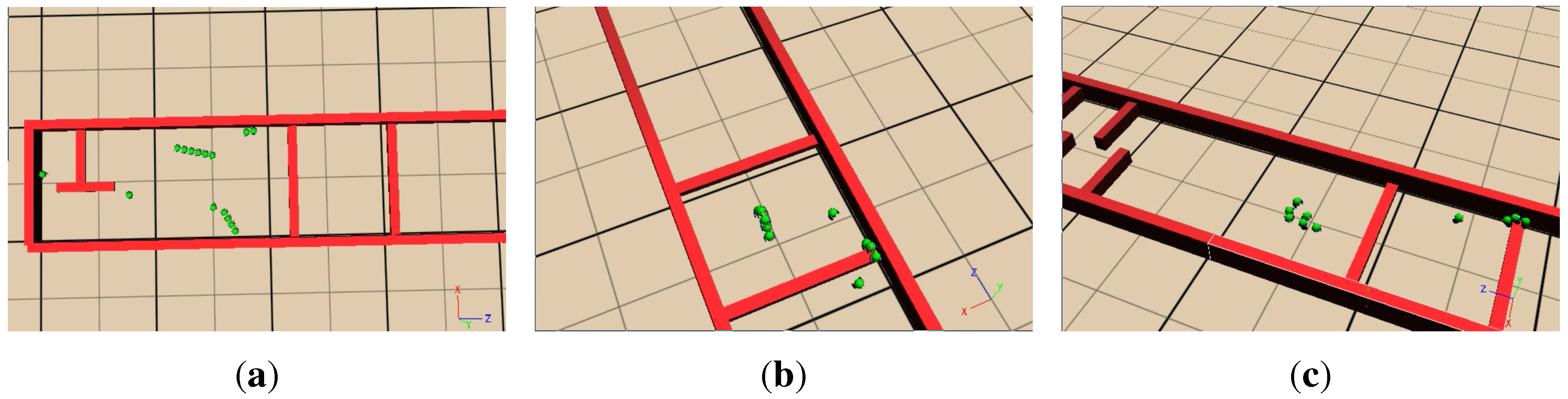
Figure 7 shows snapshots from some of the successful runs, all of which demonstrate different behaviour and utilize different environmental information in making the decisions.
Figure 6.
The fitness convergence of the runs over the evolutionary generations. The dashed lines at fitness 60 and 80 roughly indicate the fitness values when the first two low obstacles are crossed. The thick dashed line is the average fitness convergence of all the runs. The standard deviation starts at around 10 for the first generation and reaches and stays constant at 90 after the 5th generation.
Figure 6.
The fitness convergence of the runs over the evolutionary generations. The dashed lines at fitness 60 and 80 roughly indicate the fitness values when the first two low obstacles are crossed. The thick dashed line is the average fitness convergence of all the runs. The standard deviation starts at around 10 for the first generation and reaches and stays constant at 90 after the 5th generation.
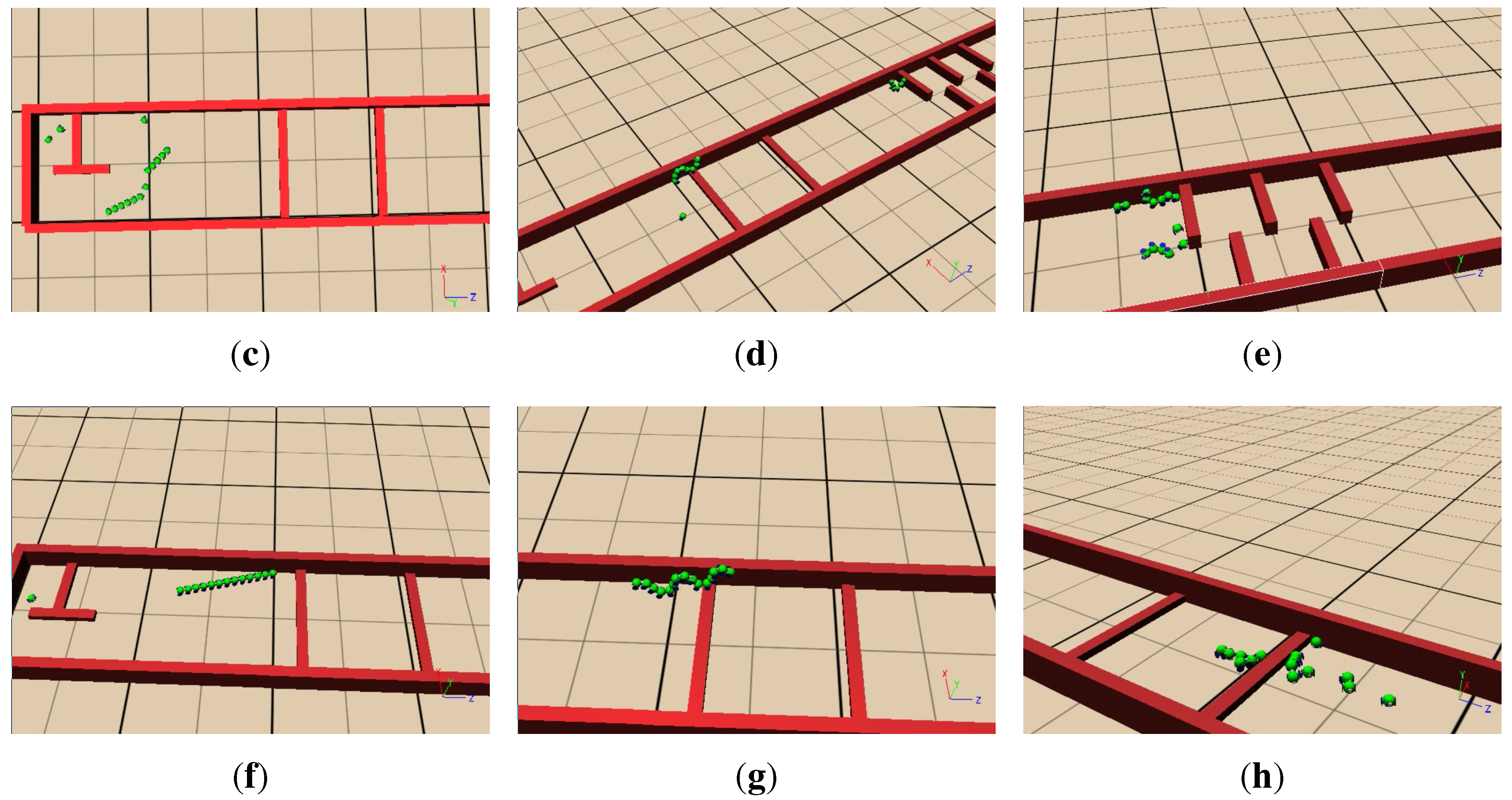
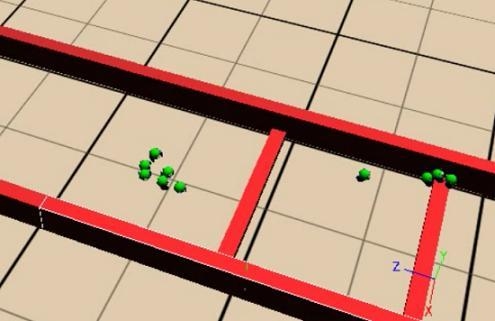
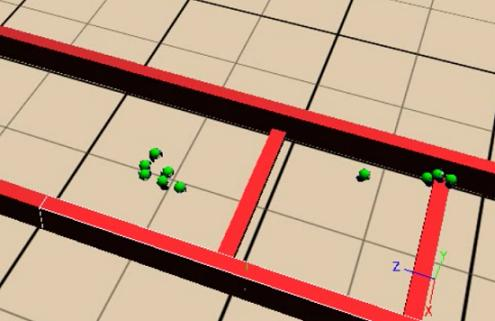
Figure 7.
Snapshots of three different control mechanisms evolved using XGP. Runs 1 and 2 illustrate the formation of two separate Snakebots, and Run 3 shows a large Snakebot being formed to cross the low obstacles. The controllers evolved for the first and third runs dismantle the Snakebot when an unexplored area is encountered, whereas the evolved controller used in the second run utilizes a strategy of disassembling the Snakebot after some time passes from the discovery of an unexplored area. In the latter case, the Snakebots cross the low obstacles and get stuck at the high obstacles for a while until there is a high enough pheromone concentration nearby. (a) Run 1; (b) Run 1; (c) Run 1; (d) Run 2; (e) Run 2; (f) Run 2; (g) Run 3; (h) Run 3; (i) Run 3.
Figure 7.
Snapshots of three different control mechanisms evolved using XGP. Runs 1 and 2 illustrate the formation of two separate Snakebots, and Run 3 shows a large Snakebot being formed to cross the low obstacles. The controllers evolved for the first and third runs dismantle the Snakebot when an unexplored area is encountered, whereas the evolved controller used in the second run utilizes a strategy of disassembling the Snakebot after some time passes from the discovery of an unexplored area. In the latter case, the Snakebots cross the low obstacles and get stuck at the high obstacles for a while until there is a high enough pheromone concentration nearby. (a) Run 1; (b) Run 1; (c) Run 1; (d) Run 2; (e) Run 2; (f) Run 2; (g) Run 3; (h) Run 3; (i) Run 3.
6. Discussion
In our observations, the resulting genetic programs mainly utilize the
variable to initiate state changes in the robots. The remaining inputs are used to limit the frequency and number of robots changing into particular states (such as initiating modular robot reconfiguration). In all cases, we observed that when the
level reached above a certain threshold, the robots under the influence would start reconfiguration (if they were swarming). On the other hand, the variables,
and
, were used for preventing the robots from initiating too many reconfigurations. The use of randomized inputs were rare. The initial idea of using random variables as an input was to encourage specialization among robots and avoid switching to same states at the same time. In our attempts to construct some simple hand crafted controllers prior to the evolution runs, the most common problem was preventing global state changes (for example, when all the robots want to initiate reconfiguration). The inputs listed in
Table 2 seem to be sufficient in preventing this; thus, a random input may not be beneficial.
The procedure for disassembling from a modular robot was significantly different among the various controllers evolved. One of the two common solutions involved detecting low pheromone concentrations. This proved to be a good approach to ensuring that all the newly discovered areas can be efficiently explored by a swarm. This, however, caused two problems: (i) early disassembly, where some of the modules might be left behind or on top of an obstacle (e.g.,
Figure 7(c)); or (ii) the inability of some robots to disconnect from the Snakebots once the pheromone levels increase in the environment. The latter could be solved by not allowing the robots to drop pheromones while they are part of a modular robot. This may, however, lead to other unanticipated problems and needs experimenting. The release of pheromones by robots in modular mode help them keep the other robots away during reconfiguration. This helps to reduce collisions and to speed-up reconfiguration process. The second solution to disassembly of Snakebots involved using pheromone values within a certain range, which made sure that the Snakebots do not disassemble the moment they start moving (high pheromone concentration area), as well as cover some new ground, which ensured that all robots are carried as far as they can be via the Snakebot (no disassembly in the low concentration areas). Although this solution scored quite high, due to the large number of robots that could clear all the obstacles, it meant that the small area between the two low obstacles remains partially explored. In this case, there were also some robots that could never disassemble, due to the pheromone levels becoming too high, which left them defunct.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}