
Experimental Validation of Passive Monopedal Hopping Mechanism


Abstract
1. Introduction
2. Simulation Model
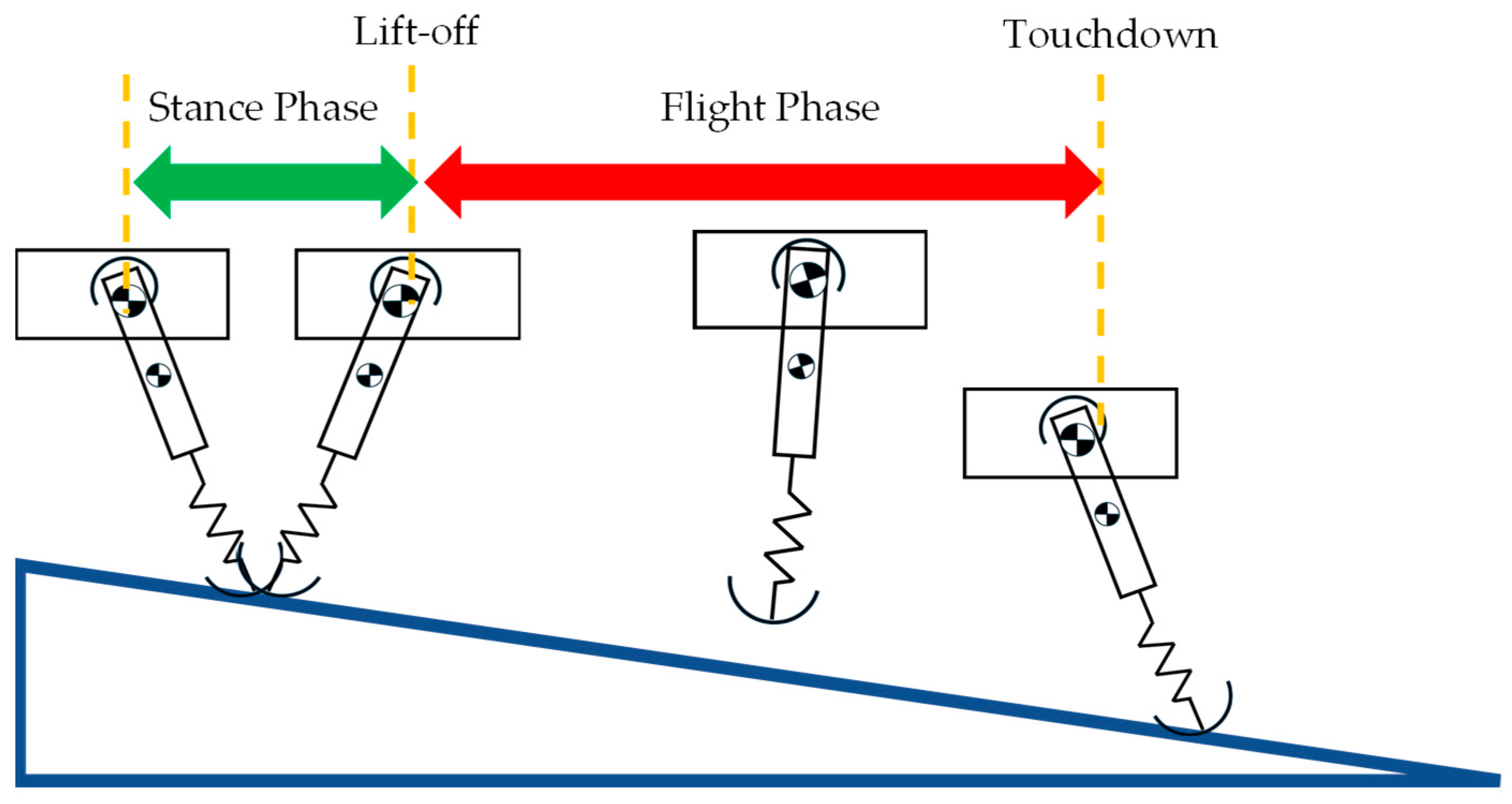
2.1. Monopedal Passive Hopping Model
2.2. Methods of Model Analysis
2.2.1. Equation of Motion for Stance Phase
2.2.2. Equation of Motion for Flight Phase
2.2.3. Lift-Off
2.2.4. Touchdown
- When the model deviates from the flight phase to the stance phase, a collision occurs between the model’s feet and the ground. During this collision, the leg tips do not slide and the collision is assumed to be fully inelastic.
- The following equations can be considered, based on the law of momentum conservation in the legs and the law of angular momentum conservation around the hip joint and touchdown point before and after collision:where and represent the state vector immediately before and after touchdown, respectively. Therefore, the states immediately before and after touchdown are derived by Equations (19)–(21).
2.2.5. Stability Analysis
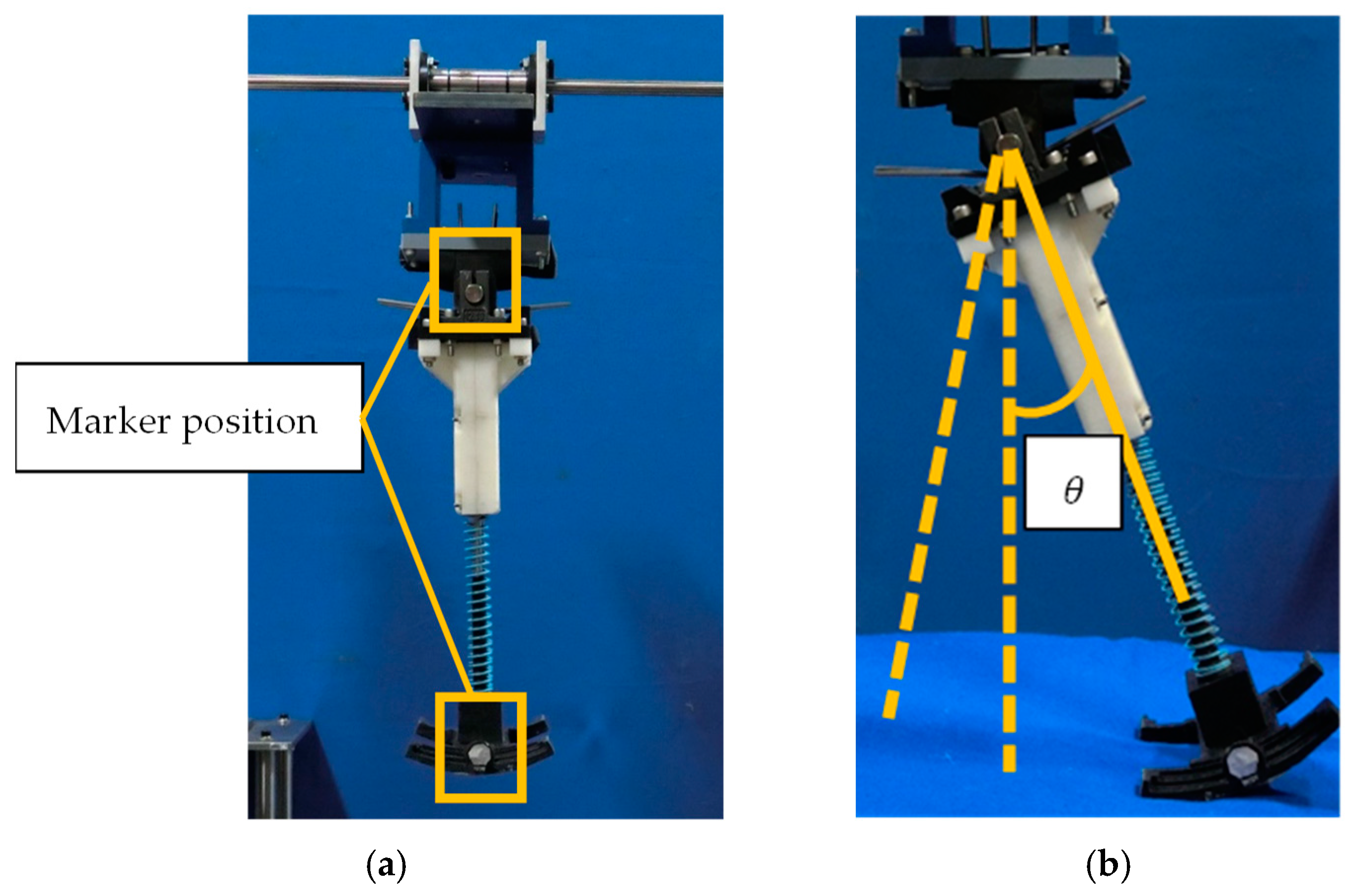
3. Monopedal Passive Hopping Robot
3.1. Monopedal Passive Hopping Robot Concept
3.2. Hip Spring
3.3. Leg Spring
3.4. Linear Bushing
3.5. Ball Splines
3.6. Hopping Mechanism
3.7. Passive Hopping Robot Analysis Method
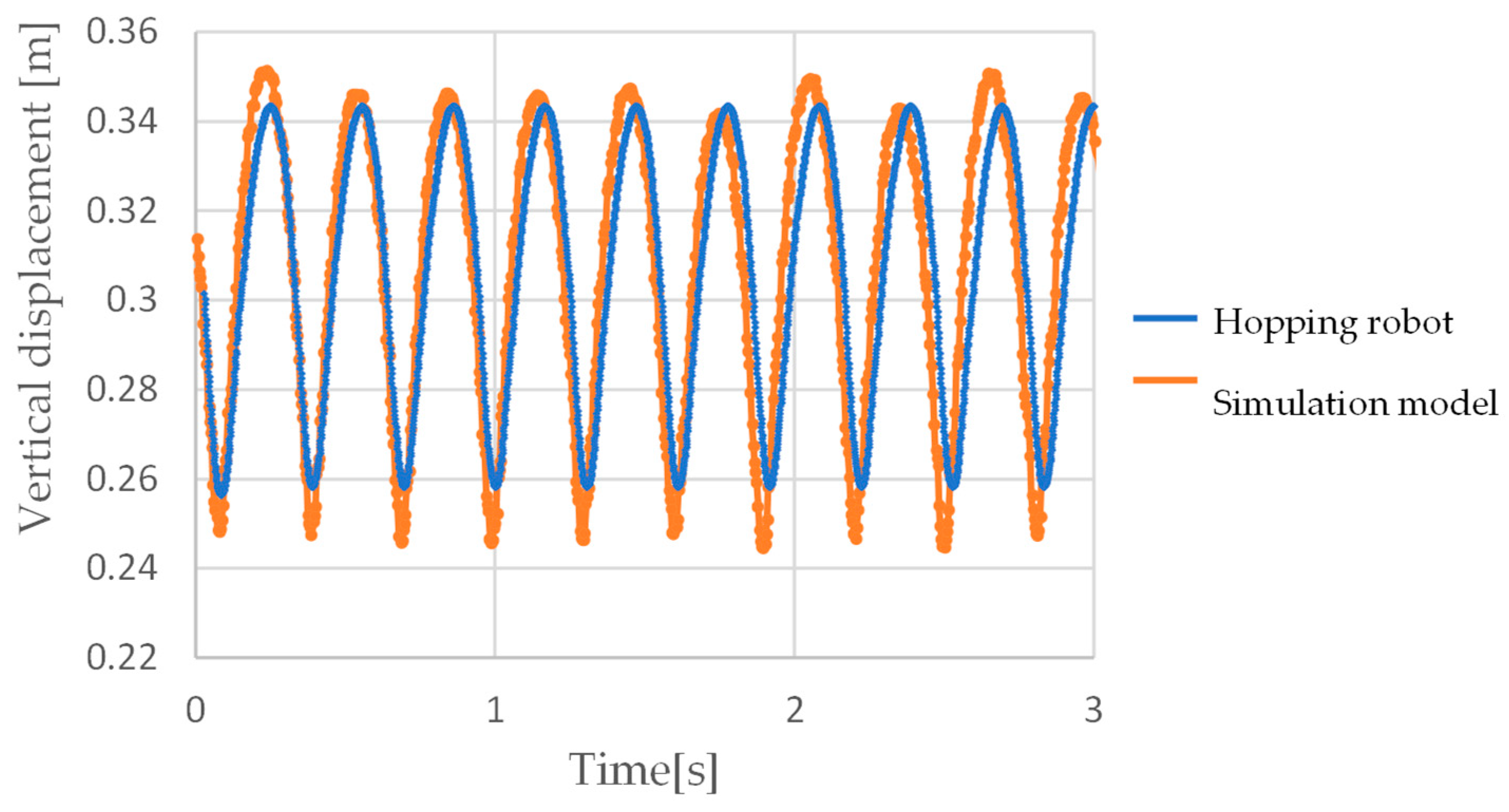
4. Comparison Between Measurement Results for Hopping Robot and Simulation Results
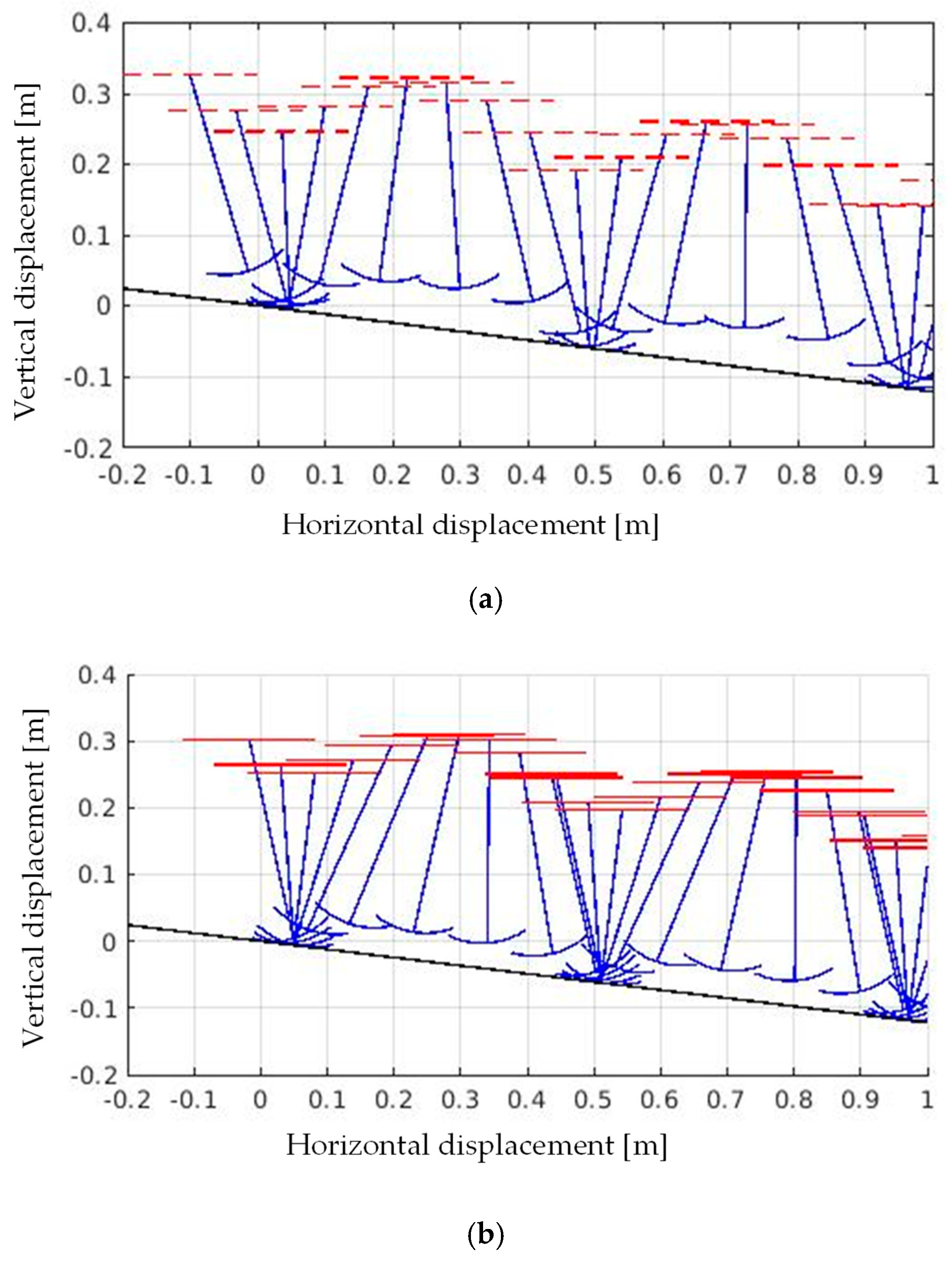
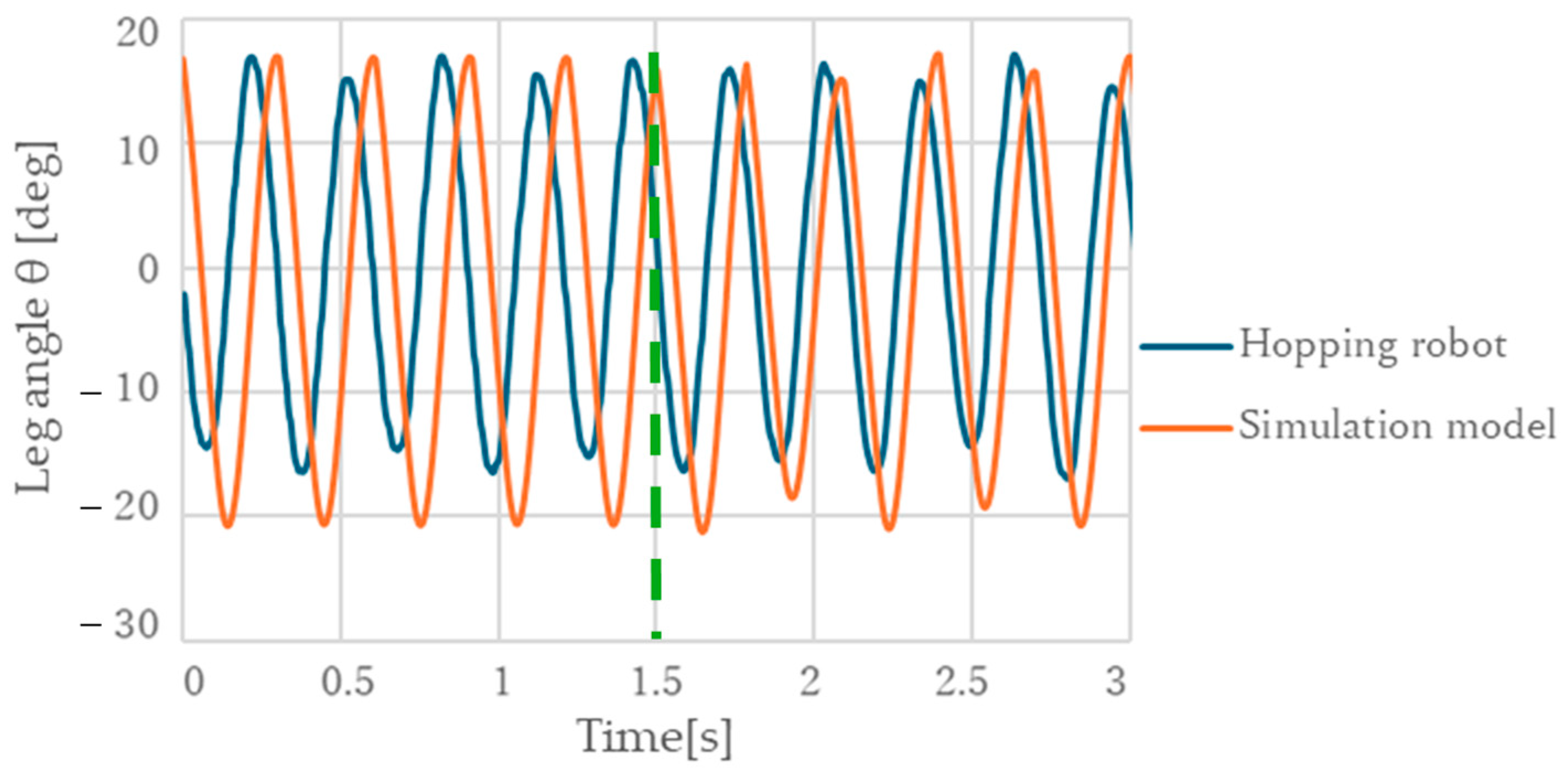
4.1. Comparison of Actual and Simulated Trajectories
4.2. Comparison of Robustness to Steps Between Hopping Robot and Simulated Model
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fu, Z.; Kumar, A.; Malik, J.; Pathak, D. Minimizing energy consumption leads to the emergence of gaits in legged robots. arXiv 2021, arXiv:2111.01674. [Google Scholar]
- Kumar, A.; Fu, Z.; Pathak, D.; Malik, J. Rma: Rapid motor adaptation for legged robots. arXiv 2021, arXiv:2107.04034. [Google Scholar]
- Smith, L.; Kew, J.C.; Bin Peng, X.; Ha, S.; Tan, J.; Levine, S. Legged robots that keep on learning: Fine-tuning locomotion policies in the real world. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Wensing, P.M.; Posa, M.; Hu, Y.; Escande, A.; Mansard, N.; Del Prete, A. Optimization-based control for dynamic legged robots. IEEE Trans. Robot. 2023, 40, 43–63. [Google Scholar] [CrossRef]
- Sim, Y.; Ramos, J. Tello leg: The study of design principles and metrics for dynamic humanoid robots. IEEE Robot. Autom. Lett. 2022, 7, 9318–9325. [Google Scholar] [CrossRef]
- Maiorino, A.; Muscolo, G.G. Biped robots with compliant joints for walking and running performance growing. Front. Mech. Eng. 2020, 6, 11. [Google Scholar] [CrossRef]
- Safartoobi, M.; Dardel, M.; Daniali, H.M. Passive walking biped robot model with flexible viscoelastic legs. Nonlinear Dyn. 2022, 109, 2615–2636. [Google Scholar] [CrossRef]
- Miandoab, M.J.; Haghjoo, M.R.; Beigzadeh, B. Toward Humanlike Passive Dynamic Walking With Physical and Dynamic Gait Resemblance. IEEE Access 2024, 12, 111060–111069. [Google Scholar] [CrossRef]
- Islam, S.; Carter, K.; Yim, J.; Kyle, J.; Bergbreiter, S.; Johnson, A.M. Scalable minimally actuated leg extension bipedal walker based on 3D passive dynamics. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. Mit cheetah 3: Design and control of a robust, dynamic quadruped robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Collins, S.; Ruina, A.; Tedrake, R.; Wisse, M. Efficient bipedal robots based on passive-dynamic walkers. Science 2005, 307, 1082–1085. [Google Scholar] [CrossRef]
- Mcgeer, T. Passive dynamic walking. Int. J. Robot. Res. 1990, 9, 62–82. [Google Scholar] [CrossRef]
- Lee, J.; Yang, J.; Park, K. The Role of Knee Joint in Passive Dynamic Walking. Int. J. Precis. Eng. Manuf. 2024, 26, 415–427. [Google Scholar] [CrossRef]
- Corral, E.; García, M.G.; Castejon, C.; Meneses, J.; Gismeros, R. Dynamic modeling of the dissipative contact and friction forces of a passive biped-walking robot. Appl. Sci. 2020, 10, 2342. [Google Scholar] [CrossRef]
- Martínez-Castelán, J.N.; Villarreal-Cervantes, M.G. Integrated structure-control design of a bipedal robot based on passive dynamic walking. Mathematics 2021, 9, 1482. [Google Scholar] [CrossRef]
- Koseki, S.; Kutsuzawa, K.; Owaki, D.; Hayashibe, M. Multimodal bipedal locomotion generation with passive dynamics via deep reinforcement learning. Front. Neurorobotics 2023, 16, 1054239. [Google Scholar] [CrossRef] [PubMed]
- Raibert, M.H. Legged Robots that Balance; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Soni, R.; Castillo, G.A.; Krishna, L.; Hereid, A.; Kolathaya, S. MELP: Model Embedded Linear Policies for Robust Bipedal Hopping. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar]
- Zhao, G.; Szymanski, F.; Seyfarth, A. Bio-inspired neuromuscular reflex based hopping controller for a segmented robotic leg. Bioinspiration Biomim. 2020, 15, 026007. [Google Scholar] [CrossRef]
- Chen, H.; Wang, B.; Hong, Z.; Shen, C.; Wensing, P.M.; Zhang, W. Underactuated motion planning and control for jumping with wheeled-bipedal robots. IEEE Robot. Autom. Lett. 2020, 6, 747–754. [Google Scholar] [CrossRef]
- Raff, M.; Rosa, N.; Remy, C.D. Generating Families of Optimally Actuated Gaits from a Legged System’s Energetically Conservative Dynamics. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Hoseinifard, S.M.; Sadedel, M. Standing balance of single-legged hopping robot model using reinforcement learning approach in the presence of external disturbances. Sci. Rep. 2024, 14, 32036. [Google Scholar] [CrossRef]
- Ossadnik, D.; Jensen, E.; Haddadin, S. Nonlinear stiffness allows passive dynamic hopping for one-legged robots with an upright trunk. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Liu, Z.; Wang, L.; Chen, C.L.P.; Zeng, X.; Zhang, Y.; Wang, Y. Energy-efficiency-based gait control system architecture and algorithm for biped robots. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2011, 42, 926–933. [Google Scholar]
- Ni, L.; Ma, F.; Wu, L. Posture control of a four-wheel-legged robot with a suspension system. IEEE Access 2020, 8, 152790–152804. [Google Scholar] [CrossRef]
- Qin, J.-H.; Luo, J.; Chuang, K.-C.; Lan, T.-S.; Zhang, L.-P.; Yi, H.-A. Stable balance adjustment structure of the quadruped robot based on the bionic lateral swing posture. Math. Probl. Eng. 2020, 2020, 1571439. [Google Scholar] [CrossRef]
- Anzai, A.; Doi, T.; Hashida, K.; Chen, X.; Han, L.; Hashimoto, K. Monopod robot prototype with reaction wheel for hopping and posture stabilisation. Int. J. Mechatron. Autom. 2021, 8, 163–174. [Google Scholar] [CrossRef]
- De, A.; Topping, T.T.; Caporale, J.D.; Koditschek, D.E. Mode-reactive template-based control in planar legged robots. IEEE Access 2022, 10, 16010–16027. [Google Scholar] [CrossRef]
- Nagase, J.; Yang, S.; Satoh, T.; Saga, N. Asymptotically Stable Single-legged Passive Dynamic Hopping. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 1234–1236. [Google Scholar] [CrossRef]
- Seyfarth, A.; Geyer, H.; Günther, M.; Blickhan, R. A movement criterion for running. J. Biomech. 2002, 35, 649–655. [Google Scholar] [CrossRef]
- He, X.; Li, X.; Wang, X.; Meng, F.; Guan, X.; Jiang, Z.; Yuan, L.; Ba, K.; Ma, G.; Yu, B. Running Gait and Control of Quadruped Robot Based on SLIP Model. Biomimetics 2024, 9, 24. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Jiang, Y.; Hosoda, K. Design and sequential jumping experimental validation of a musculoskeletal bipedal robot based on the spring-loaded inverted pendulum model. Front. Robot. AI 2024, 11, 1296706. [Google Scholar] [CrossRef]
- Hobbelen, D.G.E.; Wisse, M. Limit Cycle Walking; Hackel, M., Ed.; Humanoid robotics; I-Tech Education and Publishing: Vienna, Austria, 2007; pp. 277–294. [Google Scholar]
- Li, L.; Tokuda, I.; Asano, F. Energy-efficient locomotion generation and theoretical analysis of a quasi-passive dynamic walker. IEEE Robot. Autom. Lett. 2020, 5, 4305–4312. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| [kg] | Body mass |
| [kg] | Leg mass |
| [kg] | Supporting device mass |
| [N/m] | Spring constant of leg |
| [Nm/rad] | Spring constant of hip |
| [Nm2] | Leg moment of inertia |
| [Ns/m] | Damping constant of leg |
| [Ns/rad] | Damping constant of hip |
| [Ns/m] | Horizontal Damping constant of Supporting device |
| [Ns/m] | Vertical Damping constant of Supporting device |
| [m] | Distance from the center of mass of the leg to the center of arc of the toes |
| [m] | Distance from hip joint to center of mass of leg |
| [m] | ) |
| [m] | Leg length |
| [Nm2] | Arc radius of the toe |
| [deg] | Angle of inclination |
| [m] | Horizontal displacement of the hip joint |
| [m] | Vertical displacement of the hip joint |
| [m] | Horizontal displacement of leg center of mass |
| [m] | Vertical displacement of leg center of mass |
| Symbol | Description | Value |
|---|---|---|
| [kg] | Body mass | 3.5 |
| [kg] | Leg mass | 0.83 |
| [kg] | Supporting device mass | 1.49 |
| [N/m] | Spring constant of leg | 4080 |
| [N/rad] | Spring constant of hip | 6.34 |
| [Nm2] | Leg moment of inertia | 9.36 × 10−3 |
| [Ns/m] | Damping constant of leg | 5.0 |
| [Ns/rad] | Damping constant of hip | 0.04 |
| [Ns/m] | Horizontal Damping constant of Supporting device | 2.0 |
| [Ns/m] | Vertical Damping constant of Supporting device | 0.1 |
| [m] | Distance from the center of mass of the leg to the center of arc of the toes | 0.100 |
| [m] | Distance from hip joint to center of mass of leg | 0.085 |
| [m] | ) | 0.185 |
| [Nm2] | Arc radius of the toe | 0.12 |
| [deg] | Angle of inclination | 7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagase, J.-y.; Kawase, T.; Ueno, S. Experimental Validation of Passive Monopedal Hopping Mechanism. Robotics 2025, 14, 18. https://doi.org/10.3390/robotics14020018
Nagase J-y, Kawase T, Ueno S. Experimental Validation of Passive Monopedal Hopping Mechanism. Robotics. 2025; 14(2):18. https://doi.org/10.3390/robotics14020018
Chicago/Turabian StyleNagase, Jun-ya, Takuya Kawase, and Syunya Ueno. 2025. "Experimental Validation of Passive Monopedal Hopping Mechanism" Robotics 14, no. 2: 18. https://doi.org/10.3390/robotics14020018
APA StyleNagase, J.-y., Kawase, T., & Ueno, S. (2025). Experimental Validation of Passive Monopedal Hopping Mechanism. Robotics, 14(2), 18. https://doi.org/10.3390/robotics14020018