
RoboMan: An Adult-Sized Humanoid Robot with Enhanced Performance, Inherent Stability, and Two-Stage Balance Control to Facilitate Research on Humanoids




Abstract
1. Introduction
- RoboMan I prominent features:
- Adult Size: Our robot was almost human adult size, unlike smaller robots such as the Darmstadt Dribblers, DARwIn-OP, and Dynaped.
- Low Weight: Our robot was designed to be as lightweight as possible, surpassing robots like CHARLI and THORwIn, to support our fast-walking algorithm.
- Stability and Performance: Parallel actuators enabled a stable, fast walking system using variable P-Gains for smoother strides. Figure 1 shows RoboMan I kicking during the RoboCup international competitions.
- RoboMan II design criterea:
- Reducing weight: One of the most crucial reasons for developing RoboMan II is reducing the weight of the robot, as the humanoid’s agility and balance heavily depend on it. These are particularly beneficial for playing soccer. Roboman II is very lightweight in comparison to robots that participated in Robocup2024, like ARTEMIS and HERoEHS.
- Improving inherent balance will allow for the development of various control algorithms for walking, kicking, and other motions required for soccer, ensuring stability and performance.
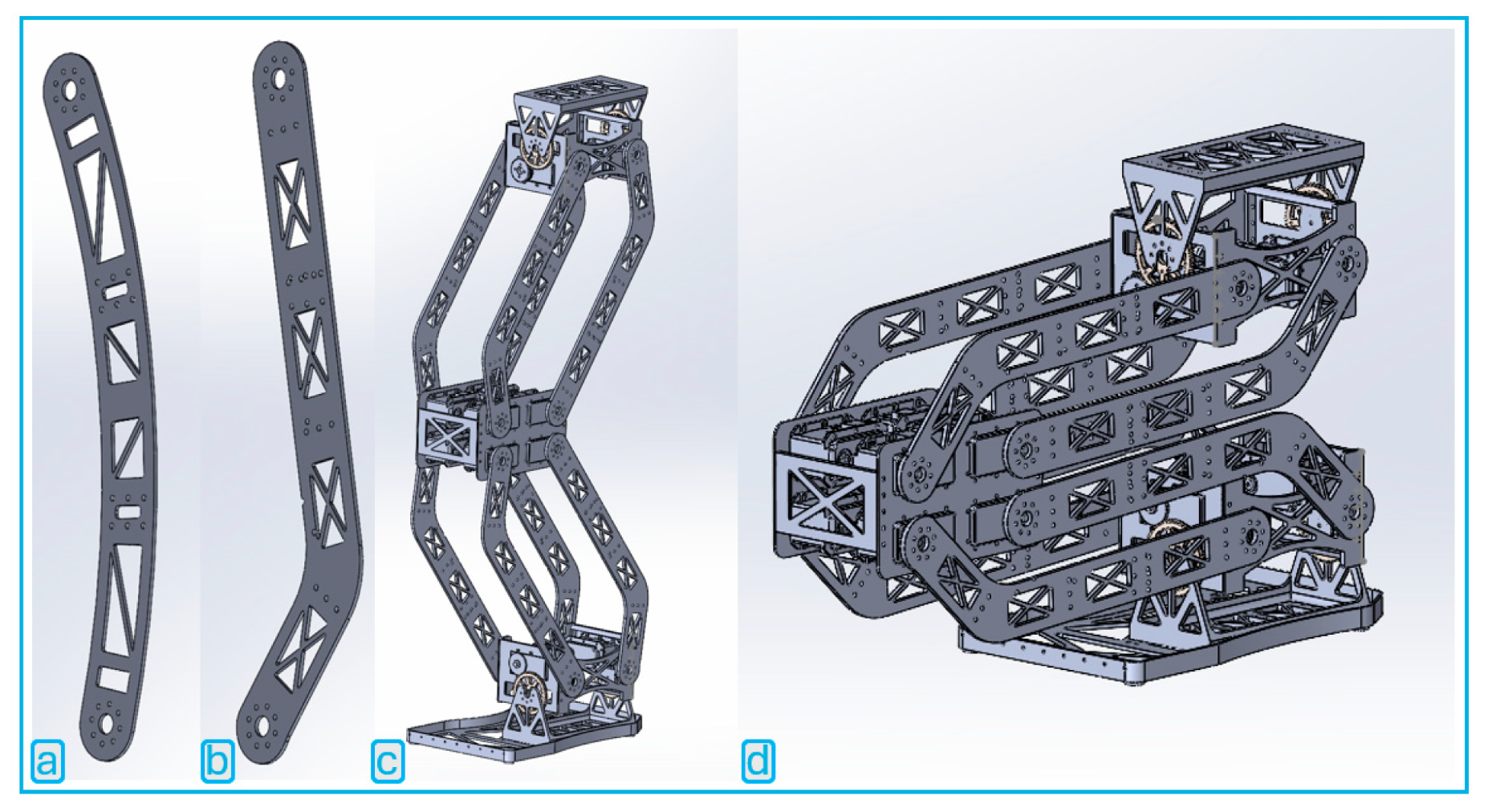
- Sitting capability: Redesigning RoboMan I’s lower limbs to allow for sitting posture, standing up when the robot falls or interacts with the objects on the ground.
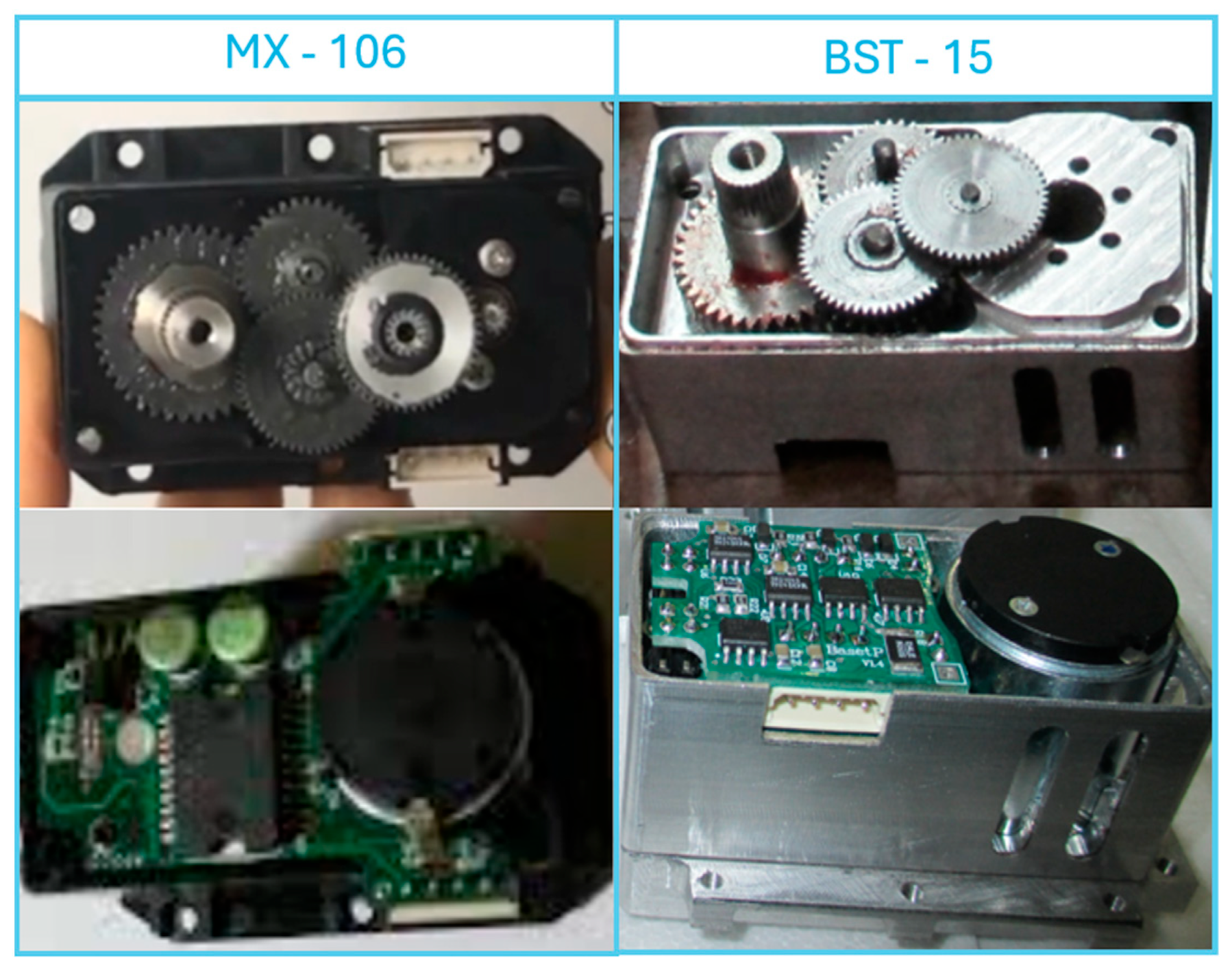
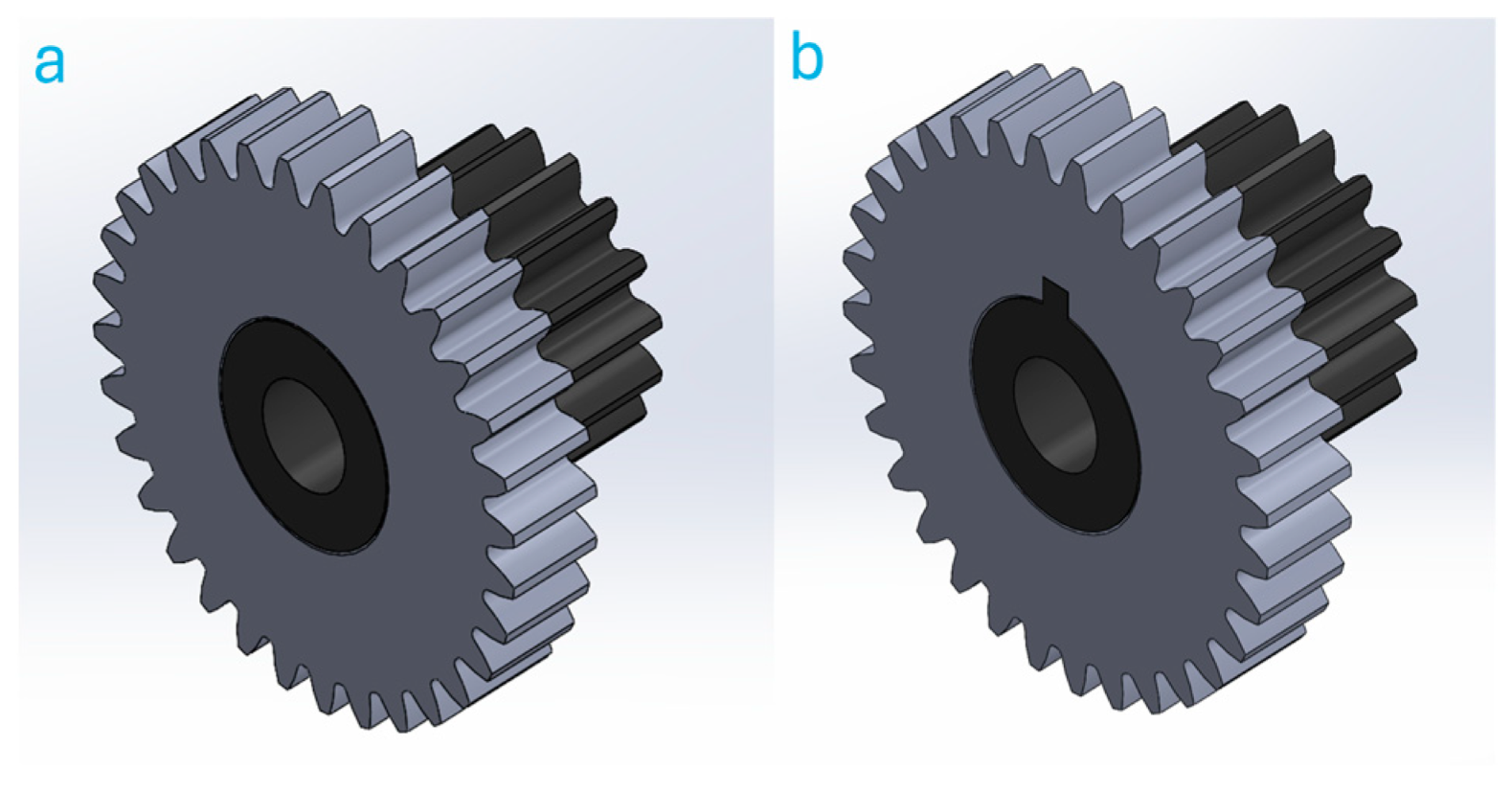
- Improving the Gearbox: Utilizing the 34 gearbox, RoboMan I’s performance was highly dependent on its components. To enhance durability, reliability, and precision in power transmission, we developed a custom homegrown gearbox, improving upon the off-the-shelf gearboxes used in RoboMan I. Additionally, the off-the-shelf gears (Dynamixel MX-106) occasionally disengaged during falls, leading to a condition equivalent to joint dislocation. Our homegrown gearbox aims to resolve this issue, ensuring consistent performance even after falls.
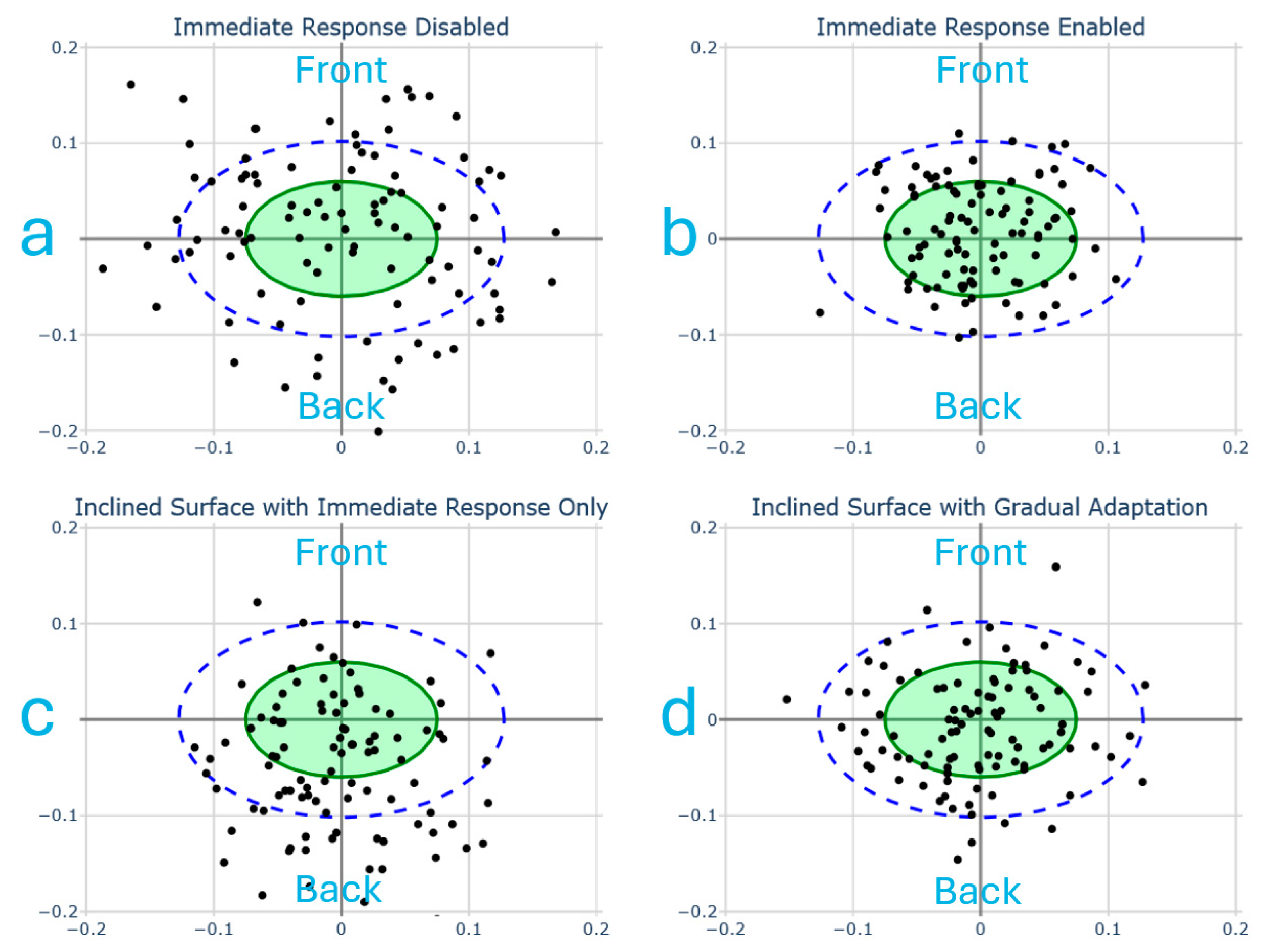
- To improve balance control, we aimed to enhance stability in response to perturbations and changing environments, thereby ensuring more stable walking and powerful kicking in soccer games.
2. Methods
2.1. Improving RoboMan’s Mechanical Structure
2.1.1. Decreasing Weight
2.1.2. Improving Inherent Balance
2.1.3. Sitting Capability
2.1.4. Optimized Servo Motor BST-15
2.2. Robot’s Electronics
3. Control
3.1. Gait and Balance System
3.1.1. Inverse Kinematics Calculation
3.1.2. Sinusoidal Trajectory Generation
3.1.3. Dynamic Adjustment of Gait Frequency
- Higher Frequencies: When the robot needs to perform quick actions, like dribbling a ball or rapidly changing direction, it needs to take faster steps. This means a higher gait frequency, which gives the robot more control and responsiveness.
- Lower Frequencies: For regular walking, especially over longer distances, slower steps are more efficient. This helps the robot conserve energy and maintain stability, making walking smoother and less tiring for the robot.
3.1.4. Robust Balance Control
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hirose, M.; Ogawa, K. Honda humanoid robots development. Phil. Trans. R. Soc. A 2007, 365, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Kaneko, K.; Harada, K.; Kanehiro, F.; Miyamori, G.; Akachi, K. Humanoid robot HRP-3. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2018; pp. 2471–2478. [Google Scholar] [CrossRef]
- Diftler, M.A.; Mehling, J.S.; Abdallah, M.E.; Radford, N.A.; Bridgwater, L.B.; Sanders, A.M.; Askew, R.S.; Linn, D.M.; Yamokoski, J.D.; Permenter, F.A.; et al. Robonaut 2—The first humanoid robot in space. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2178–2183. [Google Scholar] [CrossRef]
- Nelson, G.; Saunders, A.; Neville, N.; Swilling, B.; Bondaryk, J.; Billings, D.; Lee, C.; Playter, R.; Raibert, M. PETMAN: A Humanoid Robot for Testing Chemical Protective Clothing. JRSJ 2012, 30, 372–377. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robot. 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Griffin, R.J.; Wiedebach, G.; Bertrand, S.; Leonessa, A.; Pratt, J. Walking stabilization using step timing and location adjustment on the humanoid robot, Atlas. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 667–673. [Google Scholar] [CrossRef]
- Friedmann, M.; Kiener, J.; Kratz, R.; Petters, S.; Stelzer, M.; Thomas, D. Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize). Rob. Humanoid Leag. 2006. [Google Scholar]
- Farazi, H.; Allgeuer, P.; Ficht, G.; Brandenburger, A.; Pavlichenko, D.; Schreiber, M.; Behnke, S. RoboCup 2016 Humanoid TeenSize Winner NimbRo: Robust Visual Perception and Soccer Behaviors. In RoboCup 2016: Robot World Cup XX; Behnke, S., Sheh, R., Sarıel, S., Lee, D.D., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 9776, pp. 478–490. [Google Scholar] [CrossRef]
- Knabe, C.; Hopkins, M.; Hong, D.W. Team CHARLI: RoboCup 2012 Humanoid AdultSize League Winner. In Proceedings of the RoboCup 2012: Robot Soccer World Cup XVI, Mexico City, Mexico, 18–24 June 2012; Chen, X., Stone, P., Sucar, L.E., Van Der Zant, T., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2013; Volume 7500, pp. 59–64. [Google Scholar] [CrossRef]
- Kasaei, S.M.; Lau, N.; Pereira, A.; Shahri, E. A reliable model-based walking engine with push recovery capability. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2017; IEEE: Piscataway, NJ, USA, 2018; pp. 122–127. [Google Scholar] [CrossRef]
- Kasaei, M.; Lau, N.; Pereira, A. An optimal closed-loop framework to develop stable walking for humanoid robot. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 30–35. [Google Scholar] [CrossRef]
- Kuo, C.-H.; Chia, P.-C.; Tsai, T.-C.; Kuo, Y.-C.; Wu, M.-H. Team Description Paper: HuroEvolutionAD Humanoid Robot for RoboCup 2011 Humanoid League. Available online: https://humanoid.robocup.org/qualification/2011/d2bf1b0eae16d5b76ca8a12d7c3c5c0f0c6a75a8/HuroEvolution_AD_HumanoidAdultSize_2011_TDP.pdf (accessed on 25 September 2024).
- Mohammadi, V.; Hosseini, M.; Jafari, F.; Farazi, H.; Bamdad, D.E. Baset Adult-Size 2015 Team Description Paper. Available online: https://humanoid.robocup.org/qualification/2015/4ab6ed9739b72c119972ac674c6ee9adfa01a65c/Baset_Adult_Size_Humanoid_AdultSize_2015_TDP.pdf (accessed on 25 September 2024).
- Yi, S.J.; McGill, S.; Jeong, H.; Huh, J.; Missura, M.; Yi, H.; Ahn, M.S.; Cho, S.; Liu, K.; Hong, D.; et al. RoboCup 2015 Humanoid AdultSize League Winner. In Proceedings of the RoboCup 2015: Robot World Cup XIX, Hefei, China, 23 July 2015; Almeida, L., Ji, J., Steinbauer, G., Luke, S., Eds.; Lecture Notes in Computer Science. Springer International Publishing: Cham, Switzerland, 2015; Volume 9513, pp. 132–143. [Google Scholar] [CrossRef]
- Dorer, K.; Hochberg, U.; Wulker, M. The Sweaty 2019 RoboCup Humanoid Adult Size Team Description. 2019. Available online: https://archive.robocup.info/Soccer/Humanoid/AdultSize/TDPs/RoboCup/2019/Sweaty_HL-Adult_RC2019_TDP.pdf (accessed on 25 September 2024).
- Han, J.; Park, C.; Kim, Y.; Yoo, D.; Min, I.; Yoon, D.; Eum, Y. HERoEHS, Team Description Paper. 2019. Available online: https://submission.robocuphumanoid.com/uploads//HERoEHS-tdp-5c4ea558805c8.pdf (accessed on 25 September 2024).
- Ahn, M.S.; Zhu, T.; Hong, D. RoMeLa Team Description Paper for RoboCup 2019 Humanoid League. 2019. Available online: https://archive.robocup.info/Soccer/Humanoid/AdultSize/TDPs/RoboCup/2019/RoMeLa_HL-Adult_RC2019_TDP.pdf (accessed on 25 September 2024).
- Pavlichenko, D.; Ficht, G.; Amini, A.; Hosseini, M.; Memmesheimer, R.; Villar-Corrales, A.; Schulz, S.M.; Missura, M.; Bennewitz, M.; Behnke, S. RoboCup 2022 AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and Phase-Based In-Walk Kicks. In RoboCup 2022; Eguchi, A., Lau, N., Paetzel-Prüsmann, M., Wanichanon, T., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2023; Volume 13561, pp. 240–252. [Google Scholar] [CrossRef]
- Han, J.-K.; Ha, I.-Y.; Kim, B.-S. Educational Robotic Construction Kit: Bioloid. In Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, Republic of Korea, 6–11 July 2008. [Google Scholar]
- Ha, I.; Tamura, Y.; Asama, H.; Han, J.; Hong, D.W. Development of open humanoid platform DARwIn-OP. In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011. [Google Scholar]
- Available online: https://www.robotlab.com/hubfs/PDFs/RobotLAB/RobotLAB_Introduction_to_NAO_Textbook_TOC.pdf?srsltid=AfmBOoqcHiACsFIjA4AhYuX5W4HG4GvflesESCx2GzoBsmYGE3bXv9ZB (accessed on 25 September 2024).
- Hosseini, M.; Mohammadi, V.; Jafari, F.; Bamdad, E. RoboCup 2016 Best Humanoid Award Winner Team Baset Adult-Size. In Proceedings of the RoboCup 2016: Robot World Cup XX, Leipzig, Germany, 30 June–4 July 2016; Behnke, S., Sheh, R., Sarıel, S., Lee, D.D., Eds.; Lecture Notes in Computer Science. Springer International Publishing: Cham, Switzerland, 2017; Volume 9776, pp. 467–477. [Google Scholar] [CrossRef]
- BeagleBone Black. Available online: https://www.beagleboard.org/boards/beaglebone-black (accessed on 1 June 2016).
- MAX13488E. Available online: https://www.analog.com/en/products/max13488e.html (accessed on 25 September 2024).
- Han, J. Bipedal Walking for a Full-sized Humanoid Robot Utilizing Sinusoidal Feet Trajectories and Its Energy Consumption. Ph.D. Thesis, Hanyang University, Seoul, Republic of Korea, 2012. [Google Scholar]
- Missura, M.; Bennewitz, M.; Behnke, S. Capture Steps: Robust Walking for Humanoid Robots. Int. J. Human. Robot. 2019, 16, 1950032. [Google Scholar] [CrossRef]
- Katz, B.; Carlo, J.D.; Kim, S. Mini Cheetah: A Platform for Pushing the Limits of Dynamic Quadruped Control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 6295–6301. [Google Scholar] [CrossRef]
- Hosseini, M.; Rodriguez, D.; Behnke, S. Dynamic Hybrid Locomotion and Jumping for Wheeled-Legged Quadrupeds. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 793–799. [Google Scholar] [CrossRef]
- Niiyama, R. Soft Actuation and Compliant Mechanisms in Humanoid Robots. Curr. Robot. Rep. 2022, 3, 111–117. [Google Scholar] [CrossRef]
- Mohammadi, V.; Tajdani, M.; Masaei, M.; Ghalehney, S.M.; Lee, S.C.K.; Behboodi, A. DE-AFO: A Robotic Ankle Foot Orthosis for Children with Cerebral Palsy Powered by Dielectric Elastomer Artificial Muscle. Sensors 2024, 24, 3787. [Google Scholar] [CrossRef] [PubMed]
- Behboodi, A.; DeSantis, C.; Lubsen, J.; Lee, S.C.K. A Mechanized Pediatric Elbow Joint Powered by a De-Based Artificial Skeletal Muscle. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4930–4935. [Google Scholar] [CrossRef]
- Fallahtafti, F.; Samson, K.; Salamifar, Z.; Johanning, J.; Pipinos, I.; Myers, S.A. Enhancing walking performance in patients with peripheral arterial disease: An intervention with ankle-foot orthosis. Int. J. Cardiol. 2024, 407, 131992. [Google Scholar] [CrossRef] [PubMed]
- Stiefelhagen, R.; Ekenel, H.K.; Fugen, C.; Gieselmann, P.; Holzapfel, H.; Kraft, F. Enabling Multimodal Human–Robot Interaction for the Karlsruhe Humanoid Robot. IEEE Trans. Robot. 2007, 23, 840–851. [Google Scholar] [CrossRef]
- Mohammadi, V.; Shahbad, R.; Hosseini, M.; Gholampour, M.H.; Shiry Ghidary, S.; Najafi, F.; Behboodi, A. Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control. Sensors 2024, 24, 2585. [Google Scholar] [CrossRef] [PubMed]
- Romano, J.M.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K.J. Human-Inspired Robotic Grasp Control With Tactile Sensing. IEEE Trans. Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | MX-106T | BST-15 |
|---|---|---|
| MCU | ARM Cortex-M3 (72 [Mhz], 32 [bit]) | ARM Cortex-M3 (72 [Mhz], 32 [bit]) |
| Min Voltage (V) | 10 | 10 |
| Recommended (V) | 11.1 | 14.8 |
| Max Voltage (V) | 14.8 | 18.5 |
| Stall Torque (N.m) | 8.4 | 9.6 |
| Stall Current (A) | 5.2 | 4.2 |
| No Load Speed (rpm) | 45 | 58 |
| Step(puls/rev) | 4096 | 4096 |
| Angle (Degree) | 360 | 360 |
| Motor | Maxon | Maxon |
| Min Baud Rate (bps) | 8000 | 8000 |
| Min Baud Rate (bps) | 4,500,000 | 4,500,000 |
| Control Algorithm | PID | PID |
| Gear Material | Metal | Metal |
| Case Material | Metal (front) engineering Plastic (middle, back) | Aluminum |
| Dimensions (mm) | 40.2 × 65.1 × 46.0 | 40.0 × 64.5 × 46.0 |
| Weight (g) | 153 | 168 |
| Gear Ratio | 225:01:00 | 240:01:00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi, V.; Hosseini, M.; Jafari, F.; Behboodi, A. RoboMan: An Adult-Sized Humanoid Robot with Enhanced Performance, Inherent Stability, and Two-Stage Balance Control to Facilitate Research on Humanoids. Robotics 2024, 13, 146. https://doi.org/10.3390/robotics13100146
Mohammadi V, Hosseini M, Jafari F, Behboodi A. RoboMan: An Adult-Sized Humanoid Robot with Enhanced Performance, Inherent Stability, and Two-Stage Balance Control to Facilitate Research on Humanoids. Robotics. 2024; 13(10):146. https://doi.org/10.3390/robotics13100146
Chicago/Turabian StyleMohammadi, Vahid, Mojtaba Hosseini, Farhad Jafari, and Ahad Behboodi. 2024. "RoboMan: An Adult-Sized Humanoid Robot with Enhanced Performance, Inherent Stability, and Two-Stage Balance Control to Facilitate Research on Humanoids" Robotics 13, no. 10: 146. https://doi.org/10.3390/robotics13100146
APA StyleMohammadi, V., Hosseini, M., Jafari, F., & Behboodi, A. (2024). RoboMan: An Adult-Sized Humanoid Robot with Enhanced Performance, Inherent Stability, and Two-Stage Balance Control to Facilitate Research on Humanoids. Robotics, 13(10), 146. https://doi.org/10.3390/robotics13100146