

Emotional Experience in Human–Robot Collaboration: Suitability of Virtual Reality Scenarios to Study Interactions beyond Safety Restrictions

 , and
, and
Abstract
:1. Introduction
1.1. Human Factors Research in HRC
1.2. Virtual Reality in HRC Research
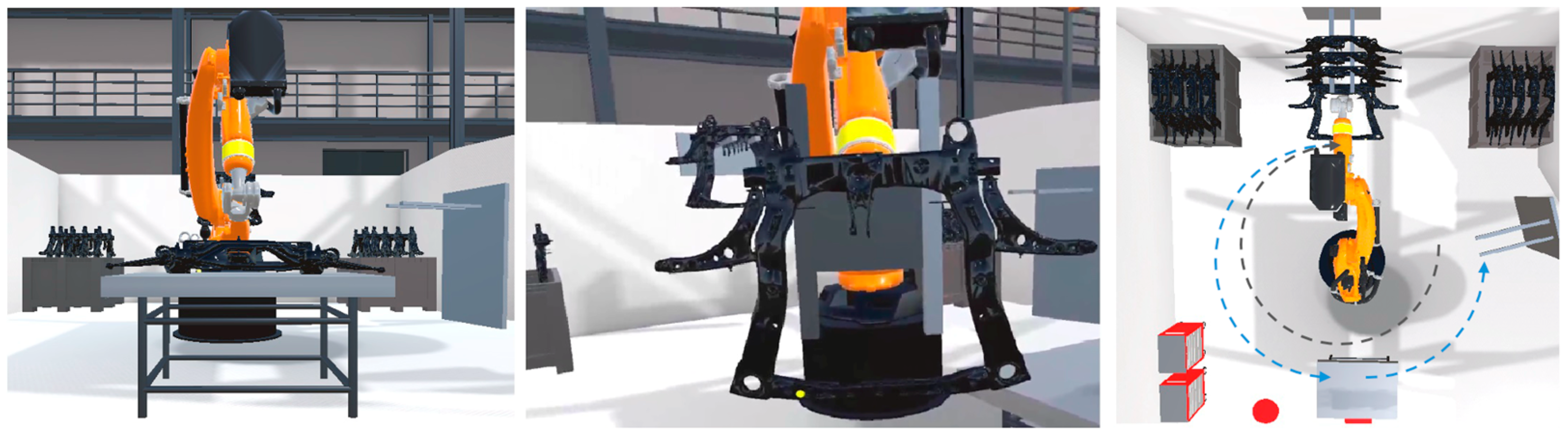
2. Specification of a VR Environment as Scale-to-Scale Reproduction of a Real-World Test Field
3. Methodology Study 1—Simulation beyond Restrictions
3.1. Participants
3.2. Measurements
3.3. Experimental Design
3.4. Experimental Procedure
3.5. Data Analysis
4. Results—Study 1—Simulation beyond Restrictions
4.1. Participants’ Perception of the VR Scene
4.2. Simulation beyond Restrictions: Effects of Experimental Variations
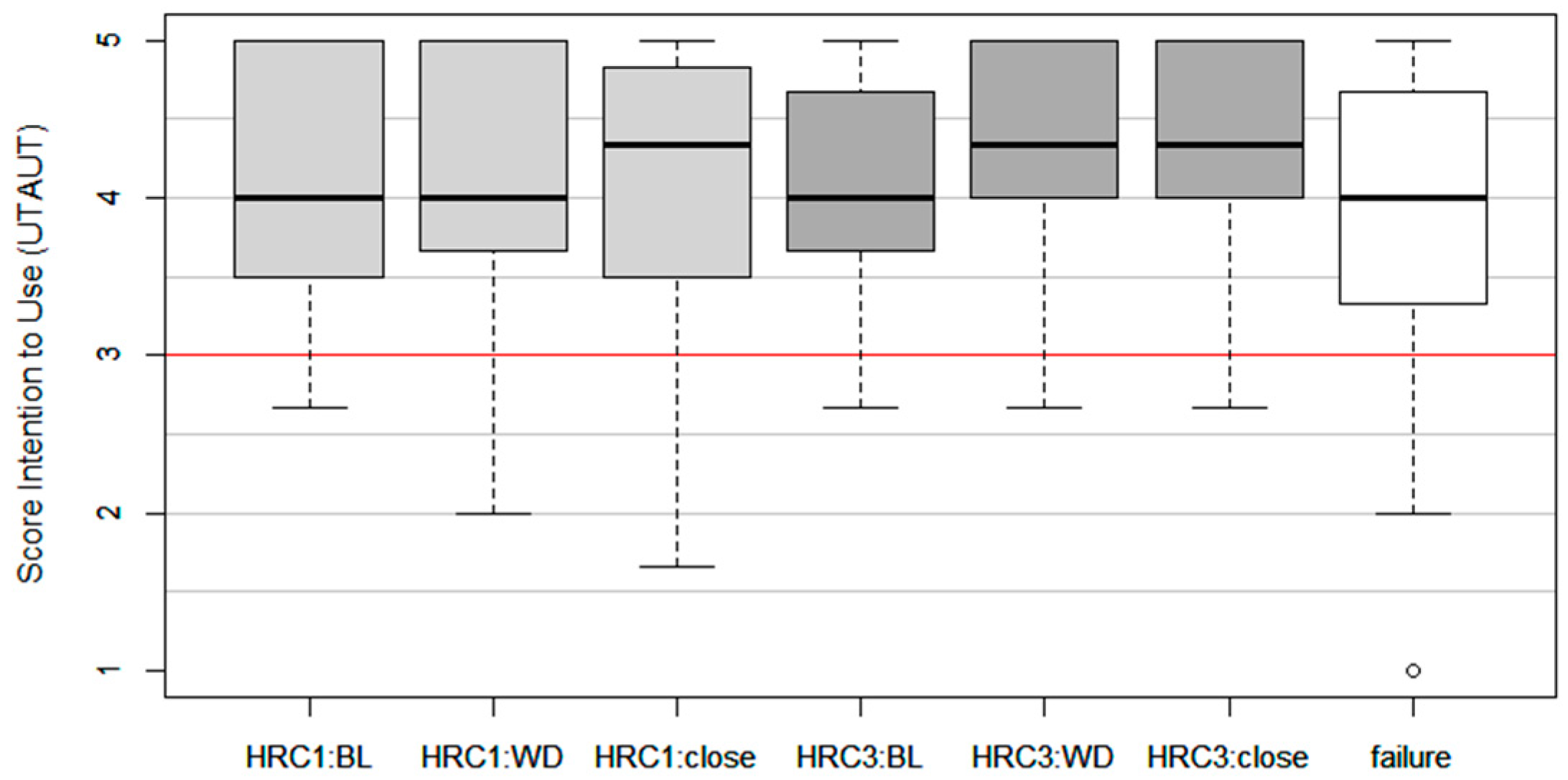
4.2.1. Effects of Interaction Level and Proximity to the Robot
4.2.2. Effects of Type and Temporal Position of Failure
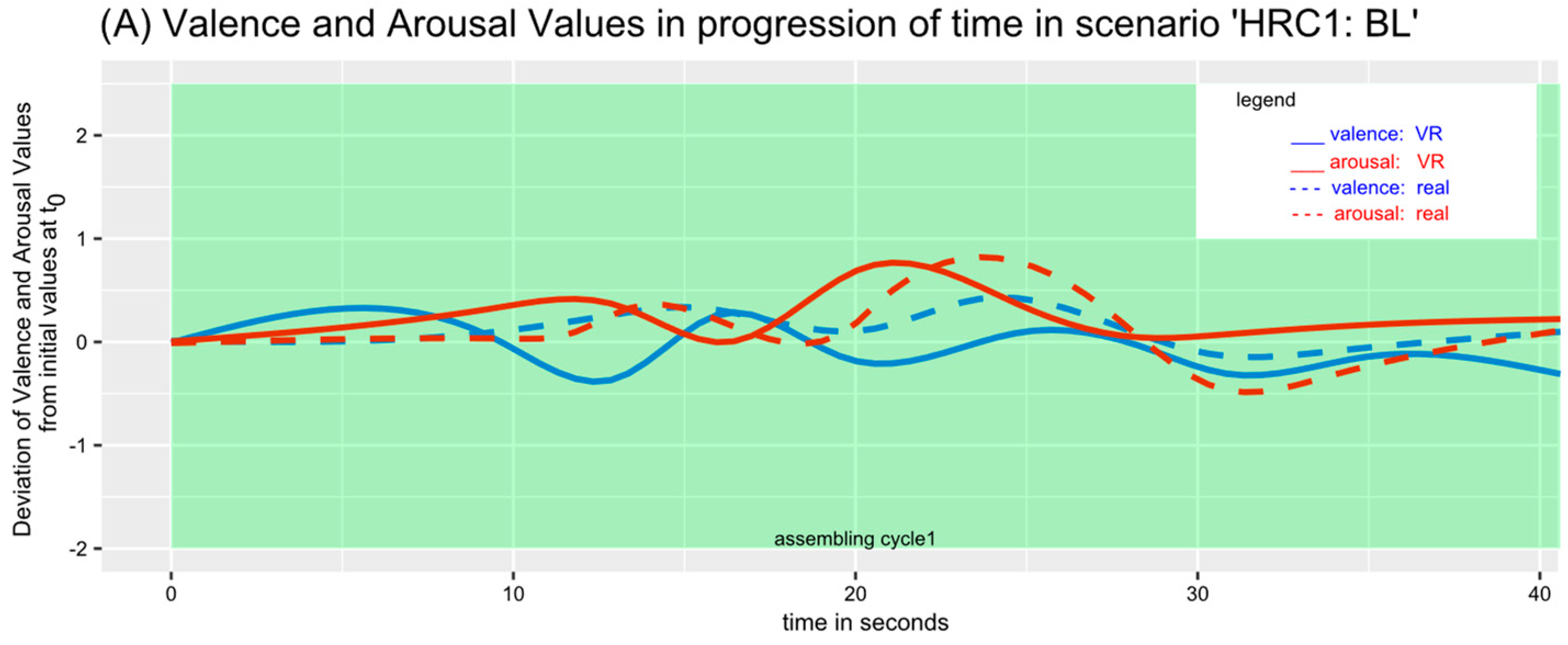
4.2.3. Effects of Interaction Time on Dependent Measures
5. Methodology Study 2—Transferability
5.1. Participants
5.2. Measurements & Experimental Design
5.3. Data Analysis
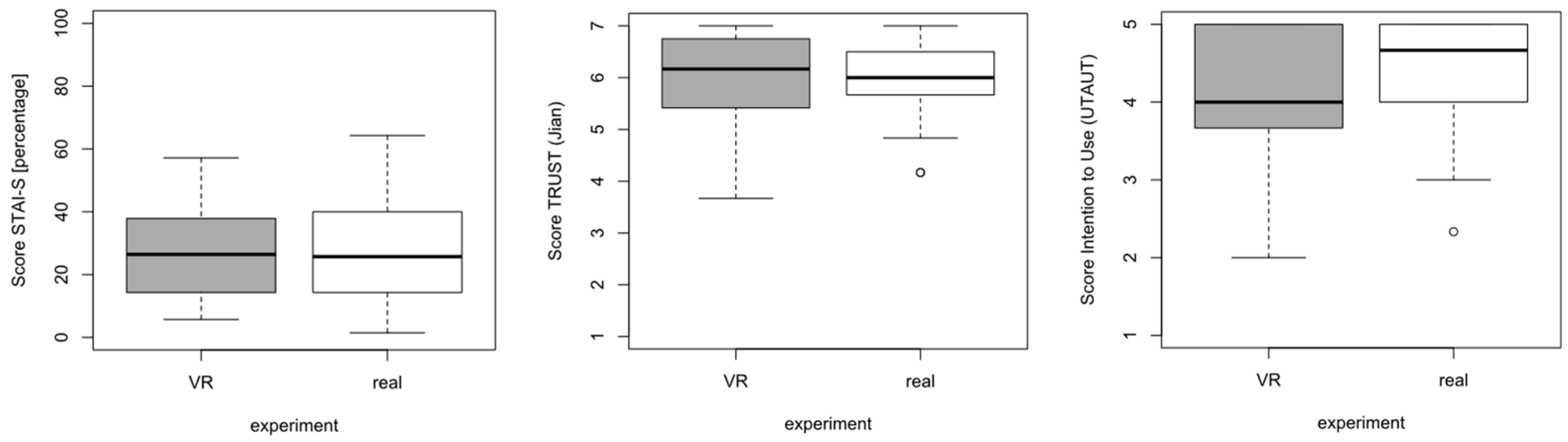
6. Results
7. Overall Discussion
7.1. Summary of Study Results and Interpretation
7.2. Limitations of Study Results and Transferability for Real-World Industrial Settings
7.3. Relevance for Further Research
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oubari, A.; Pischke, D.; Jenny, M.; Meißner, A.; Trübswetter, A. Mensch-Roboter-Kollaboration in der Produktion. Z. Wirtsch. Fabr. 2018, 113, 560–564. [Google Scholar] [CrossRef]
- Lasi, H.; Fettke, P.; Kemper, H.-G.; Feld, T.; Hoffmann, M. Industrie 4.0; Wirtschaftsinformatik; Springer: Wiesbaden, Germany, 2014; Volume 56, pp. 261–264. [Google Scholar]
- ISO/TS 15066:2016; Robots and Robotic Devices–Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016.
- Nelles, J.; Kohns, S.; Spies, J.; Bröhl, C.; Brand, C.; Mertens, A.; Schlick, C.M. Best-Practice Approach for a Solution-Oriented Technology Assessment: Ethical, Legal, and Social Issues in the Context of Human-Robot Collaboration. In Advances in Ergonomic Design of Systems, Products and Processes, Proceedings of the Annual Meeting of GfA, Aachen, Germany, 2–4 March 2016; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success factors for introducing industrial human-robot interaction in practice: An empirically driven framework. Int. J. Adv. Manuf. Technol. 2021, 112, 685–704. [Google Scholar] [CrossRef]
- Messe München GmbH. Heavy-Duty Robots Become Team Players. Available online: https://automatica-munich.com/en/newsroom/news/men-machines/heavy-duty-robots-become-team-players/ (accessed on 29 October 2023).
- Bauer, W.; Bender, M.; Braun, M.; Rally, P.; Scholtz, O. Lightweight Robots in Manual Assembly-Best to Start Simply; Frauenhofer-Institut für Arbeitswirtschaft und Organisation IAO: Stuttgart, Germany, 2016. [Google Scholar]
- Grüling, B. Neue Fertigungsstraßen im Autobau: Mein Kollege, der Roboter. 2014. Available online: https://www.spiegel.de/wissenschaft/technik/roboter-sollen-menschen-an-fertigungsstrassen-arbeit-abnehmen-a-974088.html (accessed on 29 October 2023).
- Matthias, B.; Ding, H.; Miegel, V. Die Zukunft der Mensch-Roboter Kollaboration in der industriellen Montage. In Proceedings of the Internationales Forum Mechanik (IFM), Augsburg, Germany, 30–31 October 2013. [Google Scholar]
- DIN EN ISO 10218-1; Safety Requirements for Robot Systems in an Industrial Environment—Part 1: Robots. German Institute for Standardization: Berlin, Germany, 2020.
- Xu, J.; Howard, A. The impact of first impressions on human-robot trust during problem-solving scenarios. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 435–441. [Google Scholar]
- Arai, T.; Kato, R.; Fujita, M. Assessment of operator stress induced by robot collaboration in assembly. CIRP Ann. 2010, 59, 5–8. [Google Scholar] [CrossRef]
- Kirlik, A. An Overview of Human Factors Psychology. In The Oxford Handbook of Organizational Psychology, Volume 2; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Hancock, P.A.; Kessler, T.T.; Kaplan, A.D.; Brill, J.C.; Szalma, J.L. Evolving trust in robots: Specification through sequential and comparative meta-analyses. Hum. Factors 2020, 63, 1196–1229. [Google Scholar] [CrossRef] [PubMed]
- Dwivedi, Y.K.; Rana, N.P.; Tamilmani, K.; Raman, R. A meta-analysis based modified unified theory of acceptance and use of technology (meta-UTAUT): A review of emerging literature. Curr. Opin. Psychol. 2020, 36, 13–18. [Google Scholar] [CrossRef] [PubMed]
- Brauer, R.R. Akzeptanz Kooperativer Roboter im Industriellen Kontext; Fakultät für Human-und Sozialwissenschaften der Technischen Universität Chemnitz: Chemnitz, Germany, 2019. [Google Scholar]
- Weidemann, A.; Russwinkel, N. Investigation of frustration. In Proceedings of the Mensch und Computer 2019, Hamburg, Germany, 8–11 September 2019; pp. 819–824. [Google Scholar]
- Stokes, C.K.; Lyons, J.B.; Littlejohn, K.; Natarian, J.; Case, E.; Speranza, N. Accounting for the human in cyberspace: Effects of mood on trust in automation. In Proceedings of the 2010 International Symposium on Collaborative Technologies and Systems, Chicago, IL, USA, 17–21 May 2010; pp. 180–187. [Google Scholar] [CrossRef]
- Brending, S.; Khan, A.M.; Lawo, M.; Müller, M.; Zeising, P. Reducing anxiety while interacting with industrial robots. In Proceedings of the 2016 ACM International Symposium on Wearable Computers, Heidelberg, Germany, 12–16 September 2016; pp. 54–55. [Google Scholar] [CrossRef]
- Endler, N.S.; Kocovski, N.L. State and trait anxiety revisited. J. Anxiety Disord. 2001, 15, 231–245. [Google Scholar] [CrossRef]
- Grezes, J.; Pichon, S.; de Gelder, B. Perceiving fear in dynamic body expressions. Neuroimage 2007, 35, 959–967. [Google Scholar] [CrossRef]
- Lotz, V.; Himmel, S.; Ziefle, M. Youre my mate-acceptance factors for human-robot collaboration in industry. In Proceedings of the International Conference on Competitive Manufacturing, Stellenbosch, South Africa, 30 January 2019–1 February 2019; pp. 405–411. [Google Scholar]
- Mauss, I.B.; Robinson, M.D. Measures of emotion: A review. Cogn. Emot. 2009, 23, 209–237. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E. Can You Trust Your Robot? Ergon. Des. 2011, 19, 24–29. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef]
- Dzindolet, M.T.; Peterson, S.A.; Pomranky, R.A.; Pierce, L.G.; Beck, H.P. The role of trust in automation reliance. Int. J. Hum. Comput. Stud. 2003, 58, 697–718. [Google Scholar] [CrossRef]
- Parasuraman, R.; Manzey, D.H. Complacency and bias in human use of automation: An attentional integration. Hum. Factors 2010, 52, 381–410. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D.; Hellenberg, J.; Xu, X. Pilot maneuver choice and workload in free flight. Hum. Factors 2002, 44, 171–188. [Google Scholar] [CrossRef] [PubMed]
- Beggiato, M.; Krems, J.F. The evolution of mental model, trust and acceptance of adaptive cruise control in relation to initial information. Transp. Res. Part F Traffic Psychol. Behav. 2013, 18, 47–57. [Google Scholar] [CrossRef]
- Desai, M.; Kaniarasu, P.; Medvedev, M.; Steinfeld, A.; Yanco, H. Impact of robot failures and feedback on real-time trust. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013; pp. 251–258. [Google Scholar]
- Legler, F.; Langer, D.; Dittrich, F.; Bullinger, A.C. I don’t care what the robot does! Trust in automation when working with a heavy-load robot. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2019 Annual Conference: Understanding Human Behaviour in Complex Systems; de Waard, D., Toffetti, A., Pietrantoni, L., Franke, T., Petiot, J.-F., Dumas, C., Botzer, A., Onnasch, L., Milleville, I., Mars, F., Eds.; Human Factors and Ergonomics Society: Washington, DC, USA, 2019; pp. 239–253. Available online: https://www.hfes-europe.org/largefiles/proceedingshfeseurope2019.pdf (accessed on 17 October 2023).
- Venkatesh, V.; Thong, J.Y.L.; Xu, X. Unified theory of acceptance and use of technology: A synthesis and the road ahead. J. Assoc. Inf. Syst. 2016, 17, 328–376. [Google Scholar] [CrossRef]
- Dragan, A.D.; Bauman, S.; Forlizzi, J.; Srinivasa, S.S. Effects of robot motion on human-robot collaboration. In Proceedings of the 2015 10th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Portland, OR, USA, 2–5 March 2015; pp. 51–58. [Google Scholar] [CrossRef]
- Bröhl, C.; Nelles, J.; Brandl, C.; Mertens, A.; Nitsch, V. Human-robot collaboration acceptance model: Development and comparison for Germany, Japan, China and the USA. Int. J. Soc. Robot. 2019, 11, 709–726. [Google Scholar] [CrossRef]
- Bdiwi, M.; Pfeifer, M.; Sterzing, A. A new strategy for ensuring human safety during various levels of interaction with industrial robots. CIRP Ann. 2017, 66, 453–456. [Google Scholar] [CrossRef]
- de Visser, E.; Parasuraman, R. Adaptive aiding of human-robot teaming: Effects of imperfect automation on performance, trust, and workload. J. Cogn. Eng. Decis. Mak. 2011, 5, 209–231. [Google Scholar] [CrossRef]
- Flook, R.; Shrinah, A.; Wijnen, L.; Eder, K.; Melhuish, C.; Lemaignan, S. On the impact of different types of errors on trust in human-robot interaction: Are laboratory-based HRI experiments trustworthy? Interact. Stud. 2019, 20, 455–486. [Google Scholar] [CrossRef]
- Goldhammer, F.; Scherer, R.; Greiff, S. Advancements in technology-based assessment: Emerging item formats, test designs, and data sources. Front. Psychol. 2020, 10, 3047. [Google Scholar] [CrossRef]
- Sheridan, T.B. Musings on telepresence and virtual presence. Presence Teleoperators Virtual Environ. 1992, 1, 120–126. [Google Scholar] [CrossRef]
- Kalawsky, R.S. The validity of presence as a reliable human performance metric in immersive environments. In Proceedings of the 3rd International Workshop on Presence, Delft, The Netherlands, 27–28 March 2000; pp. 1–16. [Google Scholar]
- Slater, M.; Linakis, V.; Usoh, M.; Kooper, R. Immersion, presence and performance in virtual environments: An experiment with tri-dimensional chess. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Hong Kong, 1–4 July 1996; pp. 163–172. [Google Scholar]
- Fratczak, P.; Goh, Y.M.; Kinnell, P.; Justham, L.; Soltoggio, A. Virtual Reality Study of Human Adaptability in Industrial Human-Robot Collaboration. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems (ICHMS), Rome, Italy, 7–9 September 2020; pp. 1–6. [Google Scholar]
- Oyekan, J.O.; Hutabarat, W.; Tiwari, A.; Grech, R.; Aung, M.H.; Mariani, M.P.; López-Dávalos, L.; Ricaud, T.; Singh, S.; Dupuis, C. The effectiveness of virtual environments in developing collaborative strategies between industrial robots and humans. Robot. Comput. -Integr. Manuf. 2019, 55, 41–54. [Google Scholar] [CrossRef]
- Blascovich, J.; Loomis, J.; Beall, A.C.; Swinth, K.R.; Hoyt, C.L.; Bailenson, J.N. Immersive virtual environment technology as a methodological tool for social psychology. Psychol. Inq. 2002, 13, 103–124. [Google Scholar] [CrossRef]
- You, S.; Kim, J.-H.; Lee, S.; Kamat, V.; Robert, L.P., Jr. Enhancing perceived safety in human-robot collaborative construction using immersive virtual environments. Autom. Constr. 2018, 96, 161–170. [Google Scholar] [CrossRef]
- Diemer, J.; Alpers, G.W.; Peperkorn, H.M.; Shiban, Y.; Mühlberger, A. The impact of perception and presence on emotional reactions: A review of research in virtual reality. Front. Psychol. 2015, 6, 26. [Google Scholar] [CrossRef] [PubMed]
- Weistroffer, V.; Paljic, A.; Callebert, L.; Fuchs, P. A methodology to assess the acceptability of human-robot collaboration using virtual reality. In Proceedings of the 19th ACM Symposium on Virtual Reality Software and Technology, Singapore, 6–9 October 2013; pp. 39–48. [Google Scholar]
- Koppenborg, M.; Nickel, P.; Naber, B.; Lungfiel, A.; Huelke, M. Effects of movement speed and predictability in human-robot collaboration. Hum. Factors Ergon. Manuf. Serv. Ind. 2017, 27, 197–209. [Google Scholar] [CrossRef]
- George, C.; Khamis, M.; Buschek, D.; Hussmann, H. Investigating the third dimension for authentication in immersive virtual reality and in the real world. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 277–285. [Google Scholar]
- Mathis, F.; Vaniea, K.; Khamis, M. Replicueauth: Validating the use of a lab-based virtual reality setup for evaluating authentication systems. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–18. [Google Scholar]
- Heydarian, A.; Carneiro, J.P.; Gerber, D.; Becerik-Gerber, B.; Hayes, T.; Wood, W. Immersive virtual environments versus physical built environments: A benchmarking study for building design and user-built environment explorations. Autom. Constr. 2015, 54, 116–126. [Google Scholar] [CrossRef]
- Moussa, M.; Kapadia, M.; Thrash, T.; Sumner, R.; Gross, M.; Helbing, D.; Hölscher, C. Crowd behaviour during high-stress evacuations in an immersive virtual environment. J. R. Soc. Interface 2016, 13, 20160414. [Google Scholar] [CrossRef] [PubMed]
- de-Juan-Ripoll, C.; Soler-Dom, J.L.; Guixeres, J.; Contero, M.; Álvarez Gutiérrez, N.; Alcañiz, M. Virtual reality as a new approach for risk taking assessment. Front. Psychol. 2018, 9, 2532. [Google Scholar] [CrossRef]
- Etzi, R.; Huang, S.; Scurati, G.W.; Lyu, S.; Ferrise, F.; Gallace, A.; Gaggioli, A.; Chirico, A.; Carulli, M.; Bordegoni, M. Using virtual reality to test human-robot interaction during a collaborative task. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar] [CrossRef]
- Franke, T.; Attig, C.; Wessel, D. A Personal Resource for Technology Interaction: Development and Validation of the Affinity for Technology Interaction (ATI) Scale. Int. J. Hum. Comput. Interact. 2018, 35, 456–467. [Google Scholar] [CrossRef]
- Hyun, K.K.; Jaehyun, P.; Yeongcheol, C.; Mungyeong, C. Virtual reality sickness questionnaire (VRSQ): Motion sickness measurement index in a virtual reality environment. Appl. Ergon. 2018, 69, 66–73. [Google Scholar] [CrossRef]
- Schubert, T.; Friedmann, F.; Regenbrecht, H. The experience of presence: Factor analytic insights. Presence Teleoperators Virtual Environ. 2001, 10, 266–281. [Google Scholar] [CrossRef]
- Werth, L.; Förster, J. Regulatorischer Fokus. Z. Sozialpsychologie 2007, 38, 33–42. [Google Scholar] [CrossRef]
- Russell, J.A. A circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161–1178. [Google Scholar] [CrossRef]
- Hardy, C.J.; Rejeski, W.J. Not what, but how one feels: The measurement of affect during exercise. J. Sport Exerc. Psychol. 1989, 11, 304–317. [Google Scholar] [CrossRef]
- Svebak, S.; Murgatroyd, S. Metamotivational dominance: A multimethod validation of reversal theory constructs. J. Pers. Soc. Psychol. 1985, 48, 107–116. [Google Scholar] [CrossRef]
- Murray, E.G.; Neumann, D.L.; Moffitt, R.L.; Thomas, P.R. The effects of the presence of others during a rowing exercise in a virtual reality environment. Psychol. Sport Exerc. 2016, 22, 328–336. [Google Scholar] [CrossRef]
- Jian, J.; Bisantz, A.M.; Drury, C. Foundations for an empirically determined scale of trust in automated systems. Int. J. Cogn. Ergon. 2000, 4, 53–71. [Google Scholar] [CrossRef]
- Pöhler, G.; Heine, T.; Deml, B. Itemanalyse und Faktorstruktur eines Fragebogens zur Messung von Vertrauen im Umgang mit automatischen Systemen. Z. Arbeitswissenschaft 2016, 70, 151–160. [Google Scholar] [CrossRef]
- Spielberger, C.D. State-Trait Anxiety Inventory: Bibliography; Consulting Psychologists Press: Palo Alto, CA, USA, 1989. [Google Scholar]
- Grimm, J.; State-Trait-Anxiety Inventory nach Spielberger. Deutsche Lang-und Kurzversion. Methodenforum der Universität Wien: MF-Working Paper. 2009. Available online: https://empcom.univie.ac.at/fileadmin/user_upload/p_empcom/pdfs/Grimm2009_StateTraitAngst_MFWorkPaper2009-02.pdf (accessed on 29 October 2023).
- Slater, M.; Sanchez-Vives, M.V. Enhancing Our Lives with Immersive Virtual Reality. Front. Robot. AI 2016, 3, 74. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing. In R Foundation for Statistical Computing; Chapman and Hall/CRC: Vienna, Austria, 2021; Available online: https://www.R-project.org/ (accessed on 16 December 2021).
- Tomczak, M.T.; Tomczak, E. The need to report effect size estimates revisited. An overview of some recommended measures of effect size. Trends Sport Sci. 2014, 21, 19–25. [Google Scholar]
- Wickham, H. ggplot2: Elegant Graphics for Data Analysis; Springer: New York, NY, USA, 2016; ISBN 978-3-319-24277-4. Available online: https://ggplot2.tidyverse.org (accessed on 1 April 2023).
- Wood, S.N.; Pya, N.; Säfken, B. Smoothing parameter and model selection for general smooth models. J. Am. Stat. Assoc. 2016, 111, 1548–1563. [Google Scholar] [CrossRef]
- Morey, R.D.; Rouder, J.N. BayesFactor: Computation of Bayes Factors for Common Designs, R Package Version 0.9.12-4.2; 2018. Available online: https://CRAN.R-project.org/package=BayesFactor (accessed on 1 April 2023).
- Cœugnet, S.; Naveteur, J.; Antoine, P.; Anceaux, F. Time pressure and driving: Work, emotions and risks. Transp. Res. Part F Traffic Psychol. Behav. 2013, 20, 39–51. [Google Scholar] [CrossRef]
- Robinette, P.; Wagner, A.R.; Howard, A.M. Investigating human-robot trust in emergency scenarios: Methodological lessons learned. In Robust Intelligence and Trust in Autonomous Systems; Mittu, R., Sofge, D., Wagner, A., Lawless, W., Eds.; Springer: Boston, MA, USA, 2016. [Google Scholar] [CrossRef]
- Manchon, J.B.; Bueno, M.; Navarro, J. Calibration of Trust in Automated Driving: A Matter of Initial Level of Trust and Automated Driving Style? Hum. Factors 2021. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HRC-Level | Description |
|---|---|
| 1 | No shared task (e.g., because of limited space) |
| 2 | Shared task, no physical interaction (e.g., robot as simple “Third arm” without movement in the shared workspace) |
| 3 | Shared task, “handing-over task” (e.g., robot hands over an object or robot reacts to the motion of the humans’ hand; still no physical contact during robot movement) |
| 4 | Shared task, physical interaction (human forces are applied directly on the robot) |
| Participant A | Participant B | |
|---|---|---|
| Block 1 | ||
| HRC1: BL | HRC3: BL | |
| HRC1: close | HRC3: close | |
| HRC1: WD | HRC3: WD | |
| HRC3: failure-collision | ||
| Block 2 | ||
| HRC 3: BL | HRC1: BL | |
| HRC 3: close | HRC1: close | |
| HRC3: WD | HRC1: WD | |
| HRC3: failure-sound |
| IPQ Subscales | M | SD | Min | Max |
|---|---|---|---|---|
| Spatial Presence | 3.72 | 0.41 | 3.00 | 4.20 |
| Involvement | 2.73 | 0.50 | 1.75 | 4.00 |
| Experienced Realism | 3.19 | 0.68 | 1.25 | 4.25 |
| Overall | 3.31 | 0.33 | 2.64 | 3.93 |
| State Anxiety (Scale 0–100) | Trust (Scale 1 to 7) | Intention to Use (Scale 1 to 5) | ||||
|---|---|---|---|---|---|---|
| M | SD | M | SD | M | SD | |
| HRC1: BL | 32.0 | 14.6 | 5.32 | 1.13 | 4.08 | 0.74 |
| HRC1: WD | 26.8 | 14.1 | 5.92 | 1.00 | 4.13 | 0.76 |
| HRC1: close | 30.3 | 17.1 | 5.54 | 1.03 | 4.02 | 0.92 |
| HRC3: BL | 32.3 | 18.0 | 5.20 | 0.92 | 4.06 | 0.67 |
| HRC3: WD | 27.3 | 14.5 | 5.90 | 0.88 | 4.32 | 0.63 |
| HRC3: close | 27.3 | 15.5 | 5.93 | 0.85 | 4.39 | 0.60 |
| Failure (overall) | 40.3 | 20.3 | 4.17 | 1.39 | 3.86 | 0.96 |
| State Anxiety (Scale 0 to 100) | Trust (Scale 1 to 7) | Intention to Use (Scale 1 to 5) | ||||
|---|---|---|---|---|---|---|
| VR | Real | VR | Real | VR | Real | |
| HRC1: BL | 32.0 (N = 40) | 30.7 (N = 25) | 5.32 | 5.21 | 4.08 | 3.97 |
| HRC1: WD | 26.8 (N = 40) | 27.5 (N = 25) | 5.92 | 5.90 | 4.13 | 4.28 |
| HRC1/3: failure–sound | 40.6 (N = 20) | 29.9 (N = 25) | 4.49 | 5.29 | 3.92 | 4.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Legler, F.; Trezl, J.; Langer, D.; Bernhagen, M.; Dettmann, A.; Bullinger, A.C. Emotional Experience in Human–Robot Collaboration: Suitability of Virtual Reality Scenarios to Study Interactions beyond Safety Restrictions. Robotics 2023, 12, 168. https://doi.org/10.3390/robotics12060168
Legler F, Trezl J, Langer D, Bernhagen M, Dettmann A, Bullinger AC. Emotional Experience in Human–Robot Collaboration: Suitability of Virtual Reality Scenarios to Study Interactions beyond Safety Restrictions. Robotics. 2023; 12(6):168. https://doi.org/10.3390/robotics12060168
Chicago/Turabian StyleLegler, Franziska, Jonas Trezl, Dorothea Langer, Max Bernhagen, Andre Dettmann, and Angelika C. Bullinger. 2023. "Emotional Experience in Human–Robot Collaboration: Suitability of Virtual Reality Scenarios to Study Interactions beyond Safety Restrictions" Robotics 12, no. 6: 168. https://doi.org/10.3390/robotics12060168
APA StyleLegler, F., Trezl, J., Langer, D., Bernhagen, M., Dettmann, A., & Bullinger, A. C. (2023). Emotional Experience in Human–Robot Collaboration: Suitability of Virtual Reality Scenarios to Study Interactions beyond Safety Restrictions. Robotics, 12(6), 168. https://doi.org/10.3390/robotics12060168