
Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots

 ,
,  ,
,  , , and
, , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- An inter-robot dynamical model, dependent on the distance, heading angle, and orientation angles is proposed using dynamical models of leader and follower robots. The resulting equations are rewritten as an inter-robot perturbed dynamical model, where the conveniently aggregated single perturbation contains viscous and Coulomb frictions, centripetal forces, and other unmodeled dynamics.
- A general proportional integral observer (GPIO), as seen in [43], is proposed to estimate the aggregated perturbation. A formation control law, based on the active disturbance rejection control (ADRC) approach, is then defined for the leader and follower robots using the position, distance, formation angle, and estimated perturbation. The approach becomes a robust setup ready to overcome unmodeled dynamics in real time.
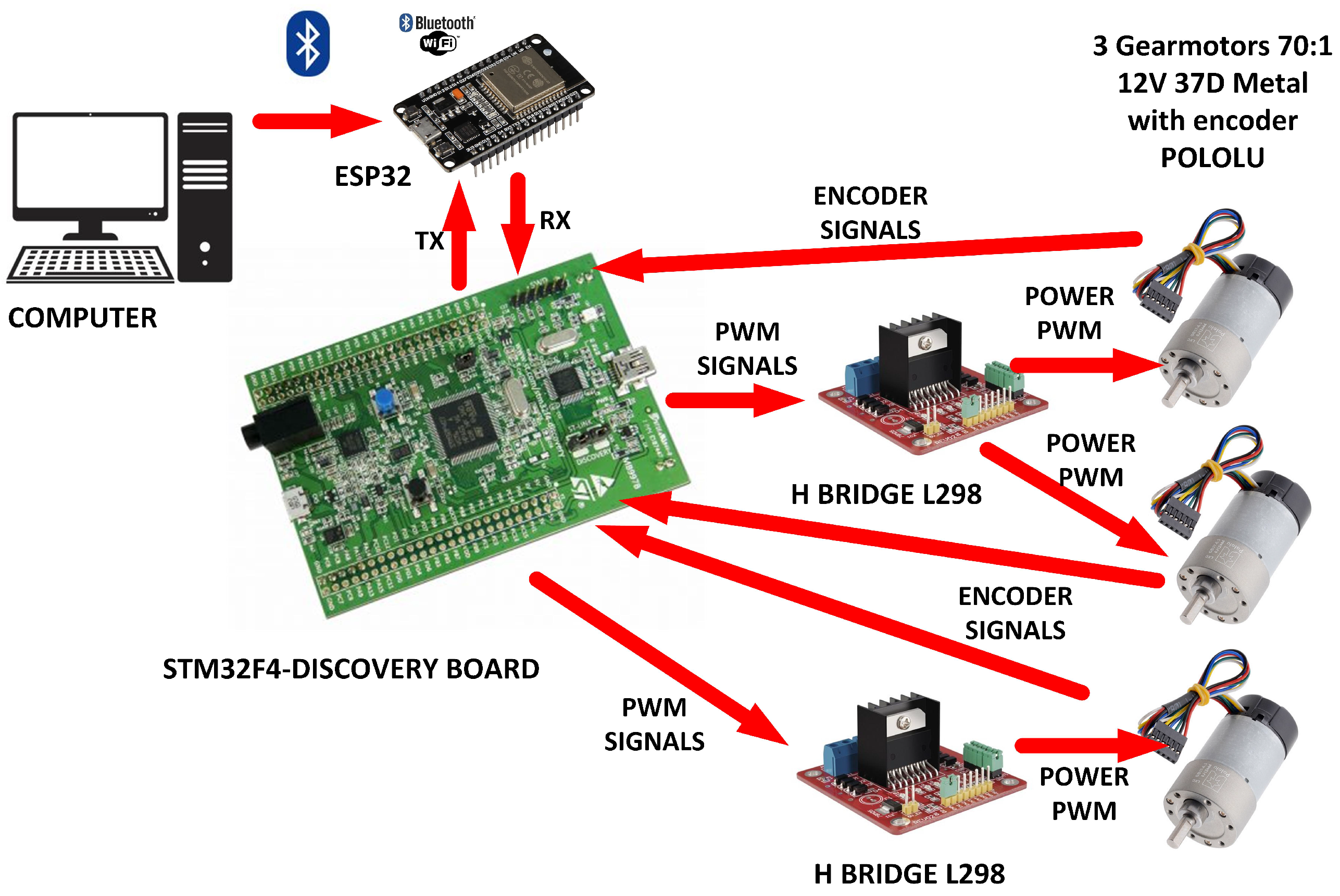
- Experimental work utilizing laboratory-scale omnidirectional mobile robots and supported with VICON© motion capture system verifies the accuracy of the parameters of the assumed dynamical models. It validates the efficacy of the proposed control.
2. Problem Statement
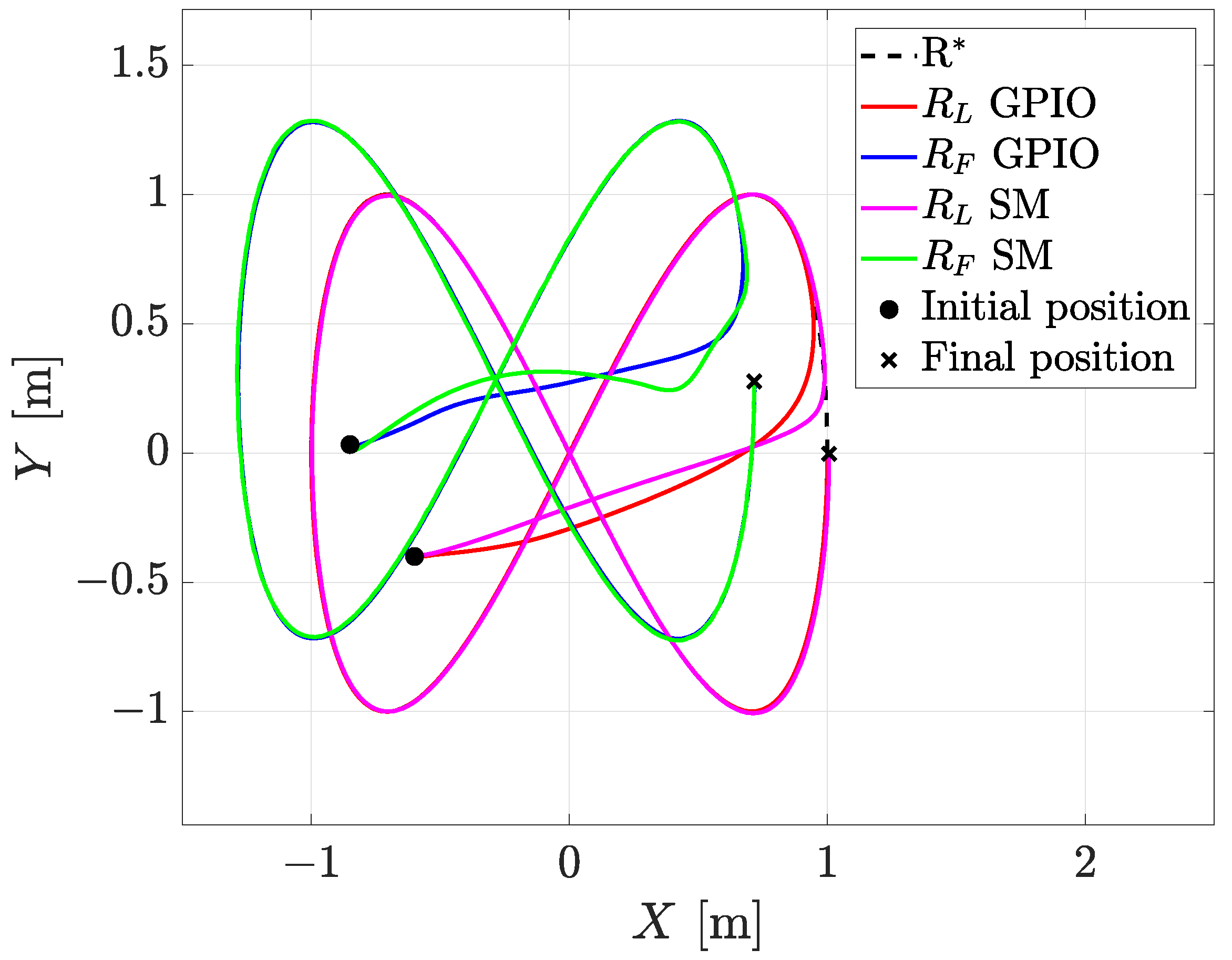
- The leader robot follows a desired trajectory, that is, , where , with , , and being the leader’s desired position in X, desired position in Y, and desired orientation, respectively;
- The follower agent keeps a desired distance and a formation angle concerning the leader robot, and a desired orientation , that is, , where .
3. Modeling Based on Distance and Formation Angle
4. Control Strategy
4.1. Leader Controller Design
4.2. Follower Controller Design
5. Numerical Simulations and Real-Time Experiments
5.1. Numerical Simulation
5.2. Real-Time Experiments
5.2.1. First Case Study
5.2.2. Second Case Study
5.3. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| GPIO | General Proportional Integral Observer |
| SM | Sliding Mode |
| ADRC | Active Disturbance Rejection Control |
| RMS | Root Mean Square |
References
- Kagan, E.; Shvalb, N.; Ben-Gal, I. Autonomous Mobile Robots and Multi-Robot Systems: Motion-Planning, Communication, and Swarming; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Farrugia, J.L.; Fabri, S.G. Swarm Robotics for Object Transportation. In Proceedings of the 2018 UKACC 12th International Conference on Control (CONTROL), Sheffield, UK, 5–7 September 2018; pp. 353–358. [Google Scholar] [CrossRef]
- Mouradian, C.; Sahoo, J.; Glitho, R.H.; Morrow, M.J.; Polakos, P.A. A coalition formation algorithm for Multi-Robot Task Allocation in large-scale natural disasters. In Proceedings of the International Wireless Communications and Mobile Computing Conference, Valencia, Spain, 26–30 June 2017; pp. 1909–1914. [Google Scholar] [CrossRef]
- Queralta, J.P.; Taipalmaa, J.; Can Pullinen, B.; Sarker, V.K.; Nguyen Gia, T.; Tenhunen, H.; Gabbouj, M.; Raitoharju, J.; Westerlund, T. Collaborative Multi-Robot Search and Rescue: Planning, Coordination, Perception, and Active Vision. IEEE Access 2020, 8, 191617–191643. [Google Scholar] [CrossRef]
- Hernandez-Martinez, E.G.; Foyo-Valdes, S.A.; Puga-Velazquez, E.S.; Meda-Campaña, J.A. Hybrid Architecture for Coordination of AGVs in FMS. Int. J. Adv. Robot. Syst. 2014, 11, 41. [Google Scholar] [CrossRef]
- Wicaksono, H.; Nilkhamhang, I. Glocal controller-based formation control strategy for flexible material handling. In Proceedings of the 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Kanazawa, Japan, 19-22 September 2017; pp. 787–792. [Google Scholar] [CrossRef]
- Schwager, M.; Vitus, M.P.; Powers, S.; Rus, D.; Tomlin, C.J. Robust Adaptive Coverage Control for Robotic Sensor Networks. IEEE Trans. Control. Netw. Syst. 2017, 4, 462–476. [Google Scholar] [CrossRef]
- Miah, M.S.; Knoll, J. Area Coverage Optimization Using Heterogeneous Robots: Algorithm and Implementation. IEEE Trans. Instrum. Meas. 2018, 67, 1380–1388. [Google Scholar] [CrossRef]
- Hernandez-Martinez, E.G.; Ferreira-Vazquez, E.D.; Fernandez-Anaya, G.; Flores-Godoy, J.J. Formation tracking of heterogeneous mobile agents using distance and area constraints. Complexity 2017, 2017, 9404193. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: A review. Annu. Rev. Control. 2020, 49, 128–144. [Google Scholar] [CrossRef]
- Oh, K.K.; Park, M.C.; Ahn, H.S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Wang, W.; Huang, J.; Wen, C.; Fan, H. Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots. Automatica 2014, 50, 1254–1263. [Google Scholar] [CrossRef]
- Zou, Y.; Wen, C.; Guan, M. Distributed Adaptive Control for Distance-based Formation and Flocking control of Multi-Agent Systems. IET Control. Theory Appl. 2019, 13, 878–885. [Google Scholar] [CrossRef]
- Wang, Y.; Hussein, I.I. Search and Classification Using Multiple Autonomous Vehicles; Springer: London, UK, 2012. [Google Scholar] [CrossRef]
- Su, Y.; Shi, P.; Wang, X.; Xu, D. Leader-following rendezvous for single-integrator multi-agent systems with uncertain leader. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 162–167. [Google Scholar] [CrossRef]
- Cruz-Ancona, C.D.; Martínez-Guerra, R.; Pérez-Pinacho, C.A. A leader-following consensus problem of multi-agent systems in heterogeneous networks. Automatica 2020, 115, 108899. [Google Scholar] [CrossRef]
- Miao, Z.; Liu, Y.H.; Wang, Y.; Yi, G.; Fierro, R. Distributed Estimation and Control for Leader-Following Formations of Nonholonomic Mobile Robots. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1946–1954. [Google Scholar] [CrossRef]
- Yan, L.; Ma, B. Practical Formation Tracking Control of Multiple Unicycle Robots. IEEE Access 2019, 7, 113417–113426. [Google Scholar] [CrossRef]
- Taheri, H.; Zhao, C.X. Omnidirectional mobile robots, mechanisms and navigation approaches. Mech. Mach. Theory 2020, 153, 103958. [Google Scholar] [CrossRef]
- Paniagua Contro, P.; Hernandez-Martinez, E.; González-Medina, O.; González-Sierra, J.; Flores-Godoy, J.J.; Ferreira, E.; Fernandez-Anaya, G. Extension of Leader-Follower Behaviours for Wheeled Mobile Robots in Multirobot Coordination. Math. Probl. Eng. 2019, 2019, 4957259. [Google Scholar] [CrossRef]
- Roza, A.; Maggiore, M.; Scardovi, L. A Smooth Distributed Feedback for Formation Control of Unicycles. IEEE Trans. Autom. Control. 2019, 64, 4998–5011. [Google Scholar] [CrossRef]
- Tang, X.; Ji, Y.; Gao, F.; Zhao, C. Research on multi-robot formation controlling method. In Proceedings of the Third International Conference on Cyberspace Technology (CCT 2015), Beijing, China, 17–18 October 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Morbidi, F.; Bretagne, E. A New Characterization of Mobility for Distance-Bearing Formations of Unicycle Robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4833–4839. [Google Scholar] [CrossRef]
- González-Sierra, J.; Flores-Montes, D.; Hernandez-Martinez, E.G.; Fernández-Anaya, G.; Paniagua-Contro, P. Robust circumnavigation of a heterogeneous multi-agent system. Auton. Robot. 2021, 45, 265–281. [Google Scholar] [CrossRef]
- Manel, M.; Faouzi, B. Predictive control based on dynamic modeling of omnidirectional mobile robot. In Proceedings of the International Conference on Engineering & MIS, Monastir, Tunisia, 8–10 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Soltani, N.; Shahmansoorian, A.; Khosravi, M. Robust distance-angle leader-follower formation control of non-holonomic mobile robots. In Proceedings of the 2014 2nd RSI/ISM International Conference on Robotics and Mechatronics, ICRoM 2014, Tehran, Iran, 15–17 October 2014; pp. 24–28. [Google Scholar] [CrossRef]
- Sun, Z.; Mou, S.; Deghat, M.; Anderson, B.D.O. Finite time distributed distance-constrained shape stabilization and flocking control for d-dimensional undirected rigid formations. Int. J. Robust Nonlinear Control 2016, 26, 2824–2844. [Google Scholar] [CrossRef]
- Oh, K.K.; Ahn, H.S. Distance-based undirected formations of single-integrator and double-integrator modeled agents in n-dimensional space. Int. J. Robust Nonlinear Control 2014, 24, 1809–1820. [Google Scholar] [CrossRef]
- Yang, Z.; Li, S.; Xu, H.; Yu, D.; Wang, Z.; Philip Chen, C. Formation Control of Omnidirectional Mobile Robots Based on Bionic Coupling Mechanism. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 184–189. [Google Scholar] [CrossRef]
- Abhishek, V.; Saha, S.K. Dynamic identification and model based control of an omni-wheeled mobile robot. In Proceedings of the International Conference on Robotics and Mechatronics, Tehran, Iran, 26–28 October 2016; pp. 595–600. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Robust saturated dynamic surface controller design for underactuated fast surface vessels including actuator dynamics. Ocean Eng. 2021, 229, 108987. [Google Scholar] [CrossRef]
- Qin, J.; Du, J. Minimum-learning-parameter-based adaptive finite-time trajectory tracking event-triggered control for underactuated surface vessels with parametric uncertainties. Ocean Eng. 2023, 271, 113634. [Google Scholar] [CrossRef]
- Bai, H.; Yu, B.; Gu, W. Research on Position Sensorless Control of RDT Motor Based on Improved SMO with Continuous Hyperbolic Tangent Function and Improved Feedforward PLL. J. Mar. Sci. Eng. 2023, 11. [Google Scholar] [CrossRef]
- Qin, J.; Du, J.; Li, J. Adaptive Finite-Time Trajectory Tracking Event-Triggered Control Scheme for Underactuated Surface Vessels Subject to Input Saturation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8809–8819. [Google Scholar] [CrossRef]
- Radke, A.; Gao, Z. A survey of state and disturbance observers for practitioners. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar] [CrossRef]
- Madonski, R.; Herman, P. Survey on methods of increasing the efficiency of extended state disturbance observers. ISA Trans. 2015, 56, 18–27. [Google Scholar] [CrossRef] [PubMed]
- Łakomy, K.; Patelski, R.; Pazderski, D. ESO Architectures in the Trajectory Tracking ADR Controller for a Mechanical System: A Comparison. In Advanced, Contemporary Control; Bartoszewicz, A., Kabziński, J., Kacprzyk, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1323–1335. [Google Scholar] [CrossRef]
- Wu, H.L.; Tsai, C.C.; Tai, F.C. Integral Terminal Sliding-Mode Formation Control for Uncertain Heterogeneous Networked Mecanum-Wheeled Omnidirectional Robots. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Miyazaki, Japan, 7–10 October 2018; pp. 1815–1820. [Google Scholar] [CrossRef]
- Fu, H.; Li, Y.; Wang, Y.; Zhang, Z. Omnidirectional Mobile Robot Active Disturbance Rejection Control. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Changchun, China, 5–8 August 2018; pp. 227–232. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Castro-Linares, R.; Puriel-Gil, G. An Active Disturbance Rejection Approach to Leader-Follower Controlled Formation. Asian J. Control 2014, 16, 382–395. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; Luviano-Juárez, A.; Madonski, R.; Ramírez-Juárez, R.; Lozada-Castillo, N.; Gao, Z. Leader-Follower ADRC Strategy for Omnidirectional Mobile Robots without Time-Derivatives in the Tracking Controller. In Proceedings of the American Control Conference, San Diego, CA, USA, 31 May–2 June 2023; pp. 405–410. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Luviano-Juárez, A.; Ramírez-Neria, M.; Zurita-Bustamante, E.W. Active Disturbance Rejection Control of Dynamic Systems: A Flatness Based Approach; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Ramírez-Neria, M.; Rodríguez-Angeles, A. On the linear control of nonlinear mechanical systems. In Proceedings of the IEEE Conference on Decision and Control, Atlanta, GA, USA, 15-17 December 2010; pp. 1999–2004. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar] [CrossRef]
- Scoz, R.D.; Espindola, T.R.; Santiago, M.F.; de Oliveira, P.R.; Alves, B.M.O.; Ferreira, L.M.A.; Amorim, C.F. Validation of a 3D Camera System for Cycling Analysis. Sensors 2021, 21, 4473. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramírez-Neria, M.; González-Sierra, J.; Madonski, R.; Ramírez-Juárez, R.; Hernandez-Martinez, E.G.; Fernández-Anaya, G. Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots. Robotics 2023, 12, 122. https://doi.org/10.3390/robotics12050122
Ramírez-Neria M, González-Sierra J, Madonski R, Ramírez-Juárez R, Hernandez-Martinez EG, Fernández-Anaya G. Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots. Robotics. 2023; 12(5):122. https://doi.org/10.3390/robotics12050122
Chicago/Turabian StyleRamírez-Neria, Mario, Jaime González-Sierra, Rafal Madonski, Rodrigo Ramírez-Juárez, Eduardo Gamaliel Hernandez-Martinez, and Guillermo Fernández-Anaya. 2023. "Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots" Robotics 12, no. 5: 122. https://doi.org/10.3390/robotics12050122
APA StyleRamírez-Neria, M., González-Sierra, J., Madonski, R., Ramírez-Juárez, R., Hernandez-Martinez, E. G., & Fernández-Anaya, G. (2023). Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots. Robotics, 12(5), 122. https://doi.org/10.3390/robotics12050122