
Computational Systems Design of Low-Cost Lightweight Robots

 , , , and
, , , and
Abstract
1. Introduction
- The proposed end-to-end systems design procedure to generate task-specific, low-cost, lightweight robots.
- The developed hardware and electronic modules to construct physically feasible robotic manipulators automatically.
- The introduced top-down approach to producing tailor-made lightweight structural components informed by dynamic loads.
2. Related Work
2.1. Modular and Reconfigurable Robots
2.2. Automatic Design of Task-Specific Robots
2.3. 3D-Printable Robots
2.4. Structural Optimisation of Robots
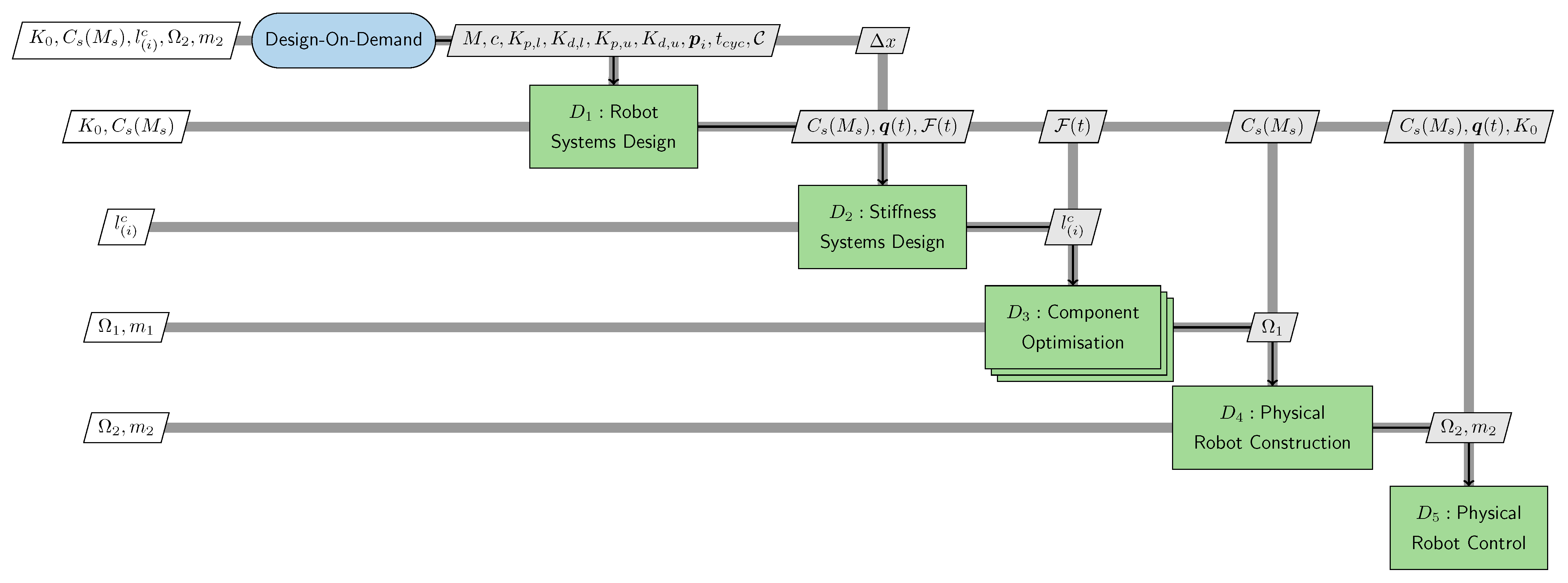
3. Method Overview
3.1. Bottom-Up Mapping
3.2. Top-Down Mapping
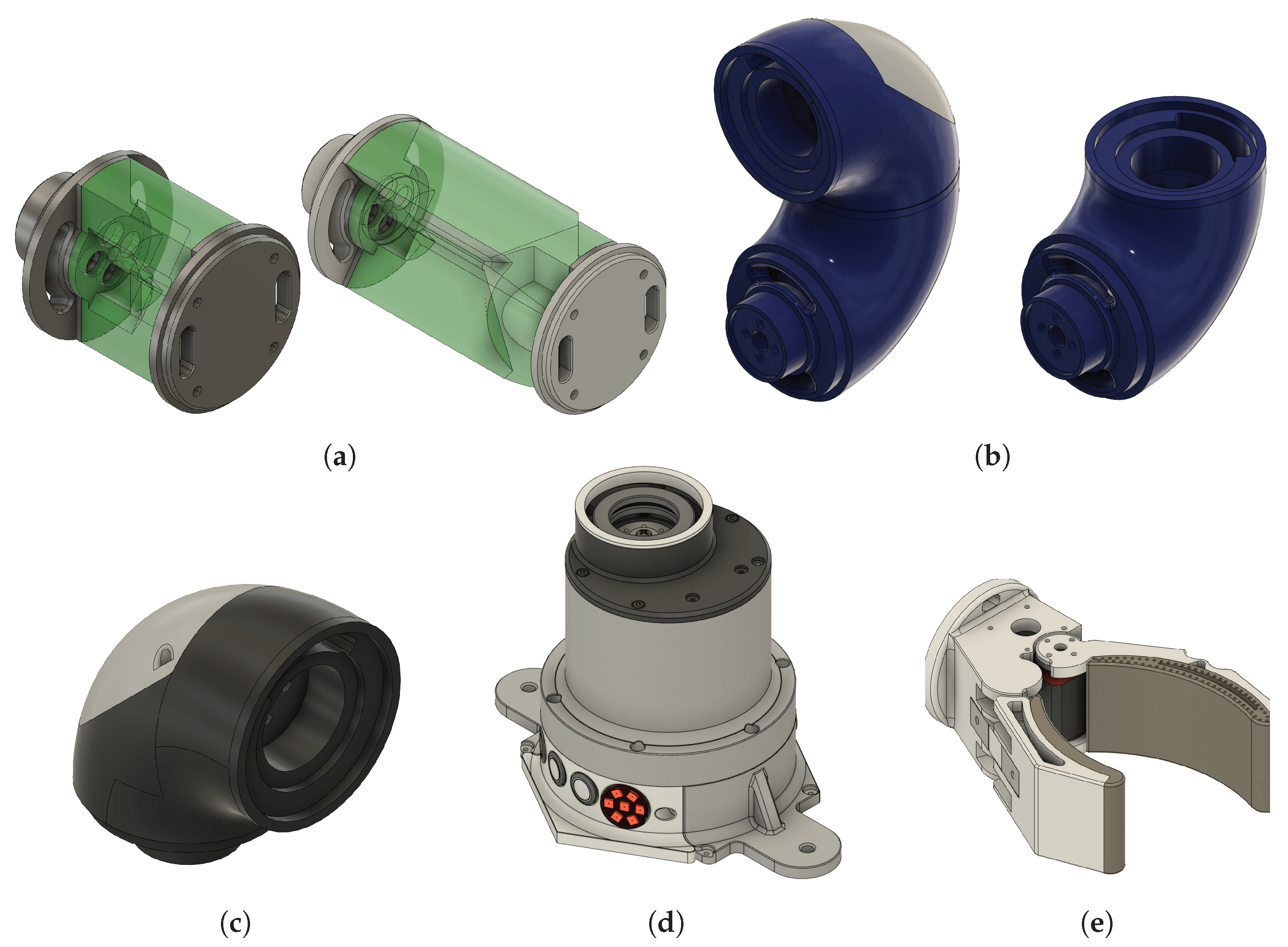
4. Module Design
4.1. Detail Design
4.1.1. Actuation Modules
4.1.2. Passive Modules
4.1.3. End-Effector Modules
4.2. Interface Design
4.2.1. Mechanical Interfaces
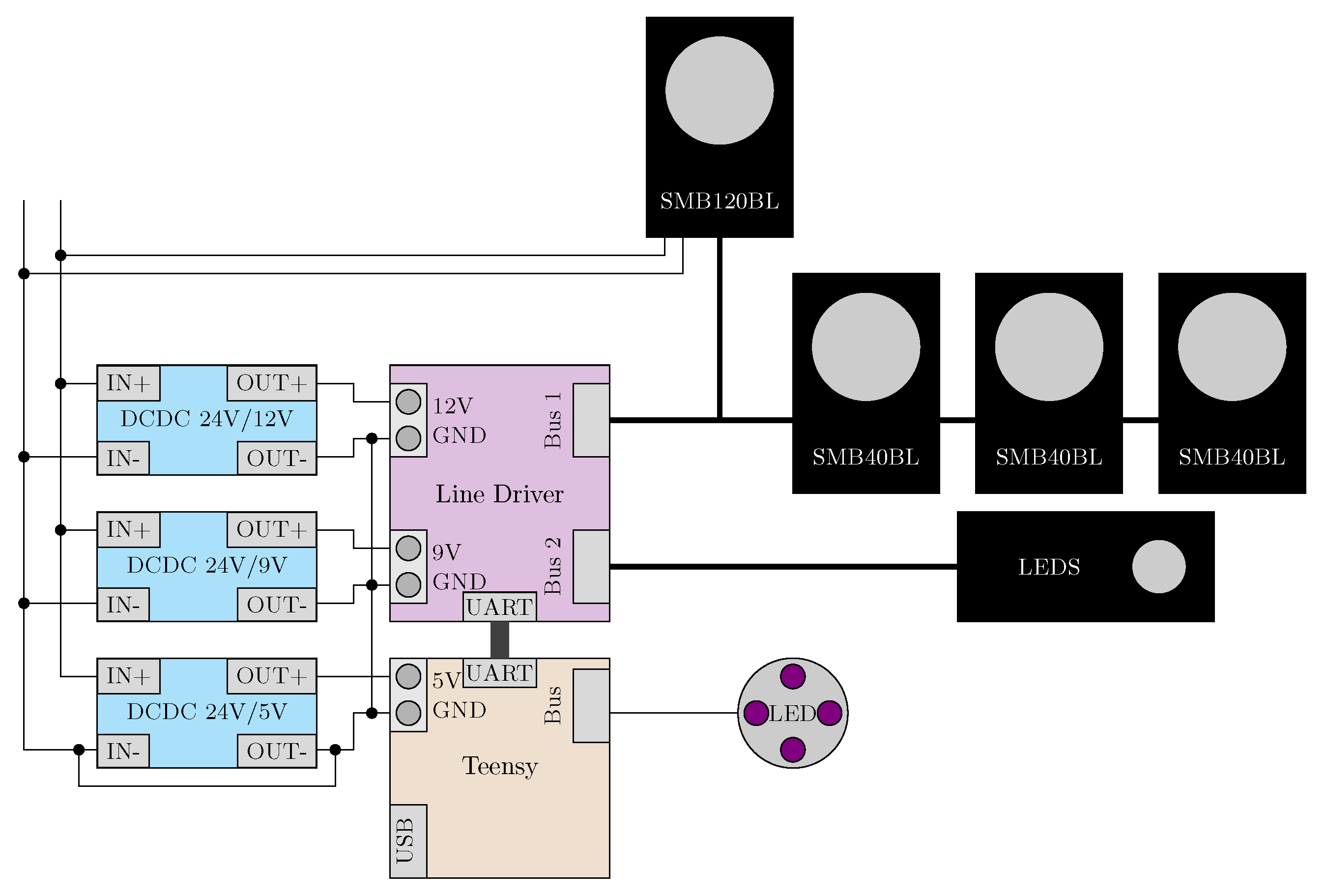
4.2.2. Electrical Interfaces
5. Robot System Design
5.1. Connection Rules c and Compositions
5.2. Automatic Design of Modular Robot Manipulators
5.3. Problem Formulation
6. : Lightweight Structure Design
6.1. Structural Optimisation Setup
6.2. Problem Formulation
7. Results and Discussion

7.1. Comparison of Modules with Design Domain as Aluminium Tubes
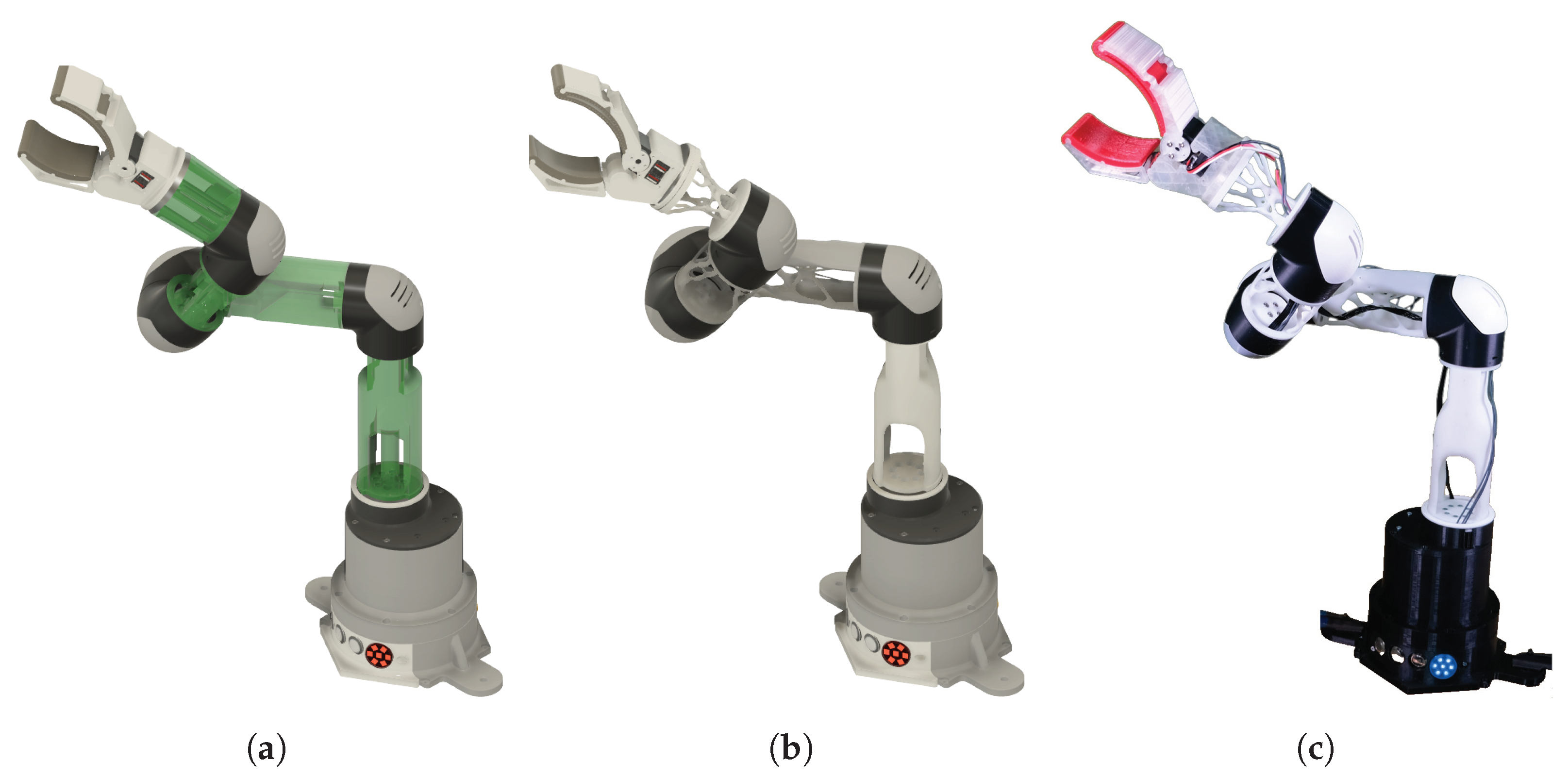
7.2. Construction and Testing of the Physical Prototype
7.3. Cost and Scalability of the Modules
8. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| OSE | Optimised structural element |
| DV | Design variable |
| QoI | Quantity of Interest |
| XDSM | Extended design structure matrix |
References
- ISO 12018:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots. Standard, International Organization for Standardization: Geneva, Switzerland, 2011.
- ISO 15066:2016; Robots and Robotic Devices—Collaborative Robots. Standard, International Organization for Standardization: Geneva, Switzerland, 2016.
- Aaltonen, I.; Salmi, T. Experiences and expectations of collaborative robots in industry and academia: Barriers and development needs. Procedia Manuf. 2019, 38, 1151–1158. [Google Scholar] [CrossRef]
- Rosenstrauch, M.J.; Krüger, J. Safe human–robot-collaboration-introduction and experiment using ISO/TS 15066. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 740–744. [Google Scholar]
- Seo, J.; Paik, J.; Yim, M. Modular reconfigurable robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 63–88. [Google Scholar] [CrossRef]
- Romiti, E.; Malzahn, J.; Kashiri, N.; Iacobelli, F.; Ruzzon, M.; Laurenzi, A.; Hoffman, E.M.; Muratore, L.; Margan, A.; Baccelliere, L.; et al. Toward a Plug-and-Work Reconfigurable Cobot. IEEE/ASME Trans. Mechatron. 2021, 27, 3219–3231. [Google Scholar] [CrossRef]
- Althoff, M.; Giusti, A.; Liu, S.B.; Pereira, A. Effortless creation of safe robots from modules through self-programming and self-verification. Sci. Robot. 2019, 4, eaaw1924. [Google Scholar] [CrossRef] [PubMed]
- Martins, J.R.R.A.; Ning, A. Engineering Design Optimization; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar]
- Katz, B.; Di Carlo, J.; Kim, S. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA; pp. 6295–6301. [Google Scholar]
- Ha, S.; Coros, S.; Alspach, A.; Bern, J.M.; Kim, J.; Yamane, K. Computational design of robotic devices from high-level motion specifications. IEEE Trans. Robot. 2018, 34, 1240–1251. [Google Scholar] [CrossRef]
- Toussaint, M.; Ha, J.S.; Oguz, O.S. Co-Optimizing Robot, Environment, and Tool Design via Joint Manipulation Planning. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 6600–6606. [Google Scholar] [CrossRef]
- Lipson, H.; Pollack, J.B. Automatic design and manufacture of robotic lifeforms. Nature 2000, 406, 974–978. [Google Scholar] [CrossRef] [PubMed]
- Kelmar, L.; Khosla, P.K. Automatic generation of kinematics for a reconfigurable modular manipulator system. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; IEEE: Piscataway, NJ, USA, 1988; pp. 663–668. [Google Scholar]
- Sims, K. Evolving virtual creatures. In Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 24–29 July 1994; pp. 15–22. [Google Scholar]
- Chen, I.M. On optimal configuration of modular reconfigurable robots. In Proceedings of the 4th International Conference on Control, Automation, Robotics, and Vision, Singapore, 4–6 December 1996. [Google Scholar]
- Paredis, C.J.; Khosla, P. Synthesis methodology for task based reconfiguration of modular manipulator systems. In Proceedings of the 6th International Symposium on Robotics Research (ISRR’93), Hidden Valley, PA, USA, 2–5 October 1993. [Google Scholar]
- Zhang, H.; Wang, W.; Deng, Z.; Zong, G.; Zhang, J. A novel reconfigurable robot for urban search and rescue. Int. J. Adv. Robot. Syst. 2006, 3, 48. [Google Scholar] [CrossRef]
- Liu, C.; Whitzer, M.; Yim, M. A distributed reconfiguration planning algorithm for modular robots. IEEE Robot. Autom. Lett. 2019, 4, 4231–4238. [Google Scholar] [CrossRef]
- Hale, M.F.; Angus, M.; Buchanan, E.; Li, W.; Woolley, R.; Le Goff, L.K.; De Carlo, M.; Timmis, J.; Winfield, A.F.; Hart, E.; et al. Hardware design for autonomous robot evolution. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, Australia, 1–4 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 2140–2147. [Google Scholar]
- Moreno, R.; Faiña, A. EMERGE modular robot: A tool for fast deployment of evolved robots. Front. Robot. 2021, 8, 699814. [Google Scholar] [CrossRef]
- Zhu, T.; Fernandez, G.I.; Togashi, C.; Liu, Y.; Hong, D. Feasibility study of limms, a multi-agent modular robotic delivery system with various locomotion and manipulation modes. In Proceedings of the 2022 19th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 4–6 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 30–37. [Google Scholar]
- Xu, J.; Chen, T.; Zlokapa, L.; Foshey, M.; Matusik, W.; Sueda, S.; Agrawal, P. An End-to-End Differentiable Framework for Contact-Aware Robot Design. In Proceedings of the Robotics: Science and Systems, Virtual, 12–16 July 2021. [Google Scholar] [CrossRef]
- Moreno, R.; Liu, C.; Faina, A.; Hernandez, H.; Gomez, J. The EMeRGE modular robot, an open platform for quick testing of evolved robot morphologies. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Berlin Germany, 15–19 July 2017; pp. 71–72. [Google Scholar] [CrossRef]
- Sathuluri, A.; Sureshbabu, A.V.; Zimmermann, M. Robust co-design of robots via cascaded optimisation. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation, London, UK, 29 May–2 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 11280–11286. [Google Scholar] [CrossRef]
- Fadini, G.; Flayols, T.; Del Prete, A.; Mansard, N.; Souères, P. Computational design of energy-efficient legged robots: Optimizing for size and actuators. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 9898–9904. [Google Scholar] [CrossRef]
- Icer, E.; Hassan, H.A.; El-Ayat, K.; Althoff, M. Evolutionary cost-optimal composition synthesis of modular robots considering a given task. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3562–3568. [Google Scholar] [CrossRef]
- Whitman, J.; Choset, H. Task-Specific Manipulator Design and Trajectory Synthesis. IEEE Robot. Autom. Lett. 2019, 4, 301–308. [Google Scholar] [CrossRef]
- Zhao, A.; Xu, J.; Konaković-Luković, M.; Hughes, J.; Spielberg, A.; Rus, D.; Matusik, W. RoboGrammar: Graph Grammar for Terrain-Optimized Robot Design. ACM Trans. Graph. 2020, 39, 1–16. [Google Scholar] [CrossRef]
- Desai, R.; Yuan, Y.; Coros, S. Computational abstractions for interactive design of robotic devices. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1196–1203. [Google Scholar] [CrossRef]
- Desai, R.; Safonova, M.; Muelling, K.; Coros, S. Automatic Design of Task-specific Robotic Arms. arXiv 2018, arXiv:1806.07419. [Google Scholar]
- Whitman, J.; Bhirangi, R.; Travers, M.; Choset, H. Modular Robot Design Synthesis with Deep Reinforcement Learning. Proc. AAAI Conf. Artif. Intell. 2020, 34, 10418–10425. [Google Scholar] [CrossRef]
- Xu, J.; Spielberg, A.; Zhao, A.; Rus, D.; Matusik, W. Multi-objective graph heuristic search for terrestrial robot design. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 9863–9869. [Google Scholar]
- Meister, E.; Nosov, E.; Levi, P. Automatic onboard and online modelling of modular and self-reconfigurable robots. In Proceedings of the 2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Philippines, 12–15 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 91–96. [Google Scholar]
- Zardini, E.; Zappetti, D.; Zambrano, D.; Iacca, G.; Floreano, D. Seeking quality diversity in evolutionary co-design of morphology and control of soft tensegrity modular robots. In Proceedings of the Genetic and Evolutionary Computation Conference, Lille, France, 10–14 July 2021; pp. 189–197. [Google Scholar] [CrossRef]
- Pigozzi, F.; Tang, Y.; Medvet, E.; Ha, D. Evolving Modular Soft Robots without Explicit Inter-Module Communication using Local Self-Attention. In Proceedings of the Genetic and Evolutionary Computation Conference, Boston, MA, USA, 9–19 July 2022; pp. 148–157. [Google Scholar] [CrossRef]
- Lehman, J.; Stanley, K.O. Evolving a diversity of virtual creatures through novelty search and local competition. In Proceedings of the 13th Annual Conference on Genetic and Evolutionary Computation, Dublin, Ireland, 12–16 July 2011; pp. 211–218. [Google Scholar] [CrossRef]
- Cheney, N.; MacCurdy, R.; Clune, J.; Lipson, H. Unshackling evolution: Evolving soft robots with multiple materials and a powerful generative encoding. In Proceedings of the 15th Annual Conference on Genetic and Evolutionary Computation, Amsterdam, The Netherlands, 6–10 July 2013; pp. 167–174. [Google Scholar] [CrossRef]
- Megaro, V.; Thomaszewski, B.; Nitti, M.; Hilliges, O.; Gross, M.; Coros, S. Interactive Design of 3D-Printable Robotic Creatures. ACM Trans. Graph. 2015, 34, 1–9. [Google Scholar] [CrossRef]
- Mehta, A.; DelPreto, J.; Rus, D. Integrated codesign of printable robots. J. Mech. Robot. 2015, 7, 021015. [Google Scholar] [CrossRef]
- Zlokapa, L.; Luo, Y.; Xu, J.; Foshey, M.; Wu, K.; Agrawal, P.; Matusik, W. An Integrated Design Pipeline for Tactile Sensing Robotic Manipulators. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway, NJ, USA; pp. 3136–3142. [Google Scholar] [CrossRef]
- Collins, J.; Geles, W.; Howard, D.; Maire, F. Towards the targeted environment-specific evolution of robot components. In Proceedings of the Genetic and Evolutionary Computation Conference, Kyoto, Japan, 15–19 July 2018; pp. 61–68. [Google Scholar] [CrossRef]
- Huang, H.B.; Zhang, G. The Topology Optimization for L-Shape Arm of Motorman-HP20 Robot. Appl. Mech. Mater. 2012, 201–202, 871–874. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y.; Chen, F.; Wang, Y.; Kumar, A.S.; Fuh, J.Y.H. Design and development of a soft gripper with topology optimization. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6239–6244. [Google Scholar] [CrossRef]
- Junk, S.; Klerch, B.; Nasdala, L.; Hochberg, U. Topology optimization for additive manufacturing using a component of a humanoid robot. Procedia CIRP 2018, 70, 102–107. [Google Scholar] [CrossRef]
- Krischer, L.; Sureshbabu, A.V.; Zimmermann, M. Modular Topology Optimization of a Humanoid Arm. In Proceedings of the 2020 3rd International Conference on Control and Robots (ICCR), Tokyo, Japan, 26–29 December 2020; pp. 65–72. [Google Scholar] [CrossRef]
- Briot, S.; Goldsztejn, A. Topology optimization of industrial robots: Application to a five-bar mechanism. Mech. Mach. Theory 2018, 120, 30–56. [Google Scholar] [CrossRef]
- Orquéra, M.; Campocasso, S.; Millet, D. Some principles to optimise an additively manufactured multi-component product. J. Eng. Des. 2020, 31, 219–240. [Google Scholar] [CrossRef]
- Albers, A.; Ottnad, J. System based topology optimization as development tools for lightweight components in humanoid robots. In Proceedings of the 2008 8th IEEE-RAS International Conference on Humanoid Robots, Daejon, Republic of Korea, 1–3 December 2008; pp. 674–680. [Google Scholar] [CrossRef]
- Martins, J.R.R.A.; Lambe, A.B. Multidisciplinary Design Optimization: A Survey of Architectures. AIAA J. 2013, 51, 2049–2075. [Google Scholar] [CrossRef]
- Zimmermann, M.; von Hoessle, J.E. Computing solution spaces for robust design. Int. J. Numer. Methods Eng. 2013, 94, 290–307. [Google Scholar] [CrossRef]
- Krischer, L.; Zimmermann, M. Decomposition and optimization of linear structures using meta models. Struct. Multidiscip. Optim. 2021, 64, 2393–2407. [Google Scholar] [CrossRef]
- Krischer, L.; Vazhapilli Sureshbabu, A.; Zimmermann, M. Active-Learning Combined with Topology Optimization for Top-Down Design of Multi-Component Systems. Proc. Des. Soc. 2022, 2, 1629–1638. [Google Scholar] [CrossRef]
- Zimmermann, M.; Königs, S.; Niemeyer, C.; Fender, J.; Zeherbauer, C.; Vitale, R.; Wahle, M. On the design of large systems subject to uncertainty. J. Eng. Des. 2017, 28, 233–254. [Google Scholar] [CrossRef]
- Haskins, C.; Forsberg, K.; Krueger, M.; Walden, D.; Hamelin, D. Systems engineering handbook. In Proceedings of the INCOSE. International Council on Systems Engineering, Hoboken, NJ, USA, 10–15 July 2015; Volume 9, pp. 13–16. [Google Scholar]
- Erschen, S.; Duddeck, F.; Gerdts, M.; Zimmermann, M. On the Optimal Decomposition of High-Dimensional Solution Spaces of Complex Systems. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2017, 4, 021008. [Google Scholar] [CrossRef]
- Sathuluri, A.; Sureshbabu, A.V.; Zimmermann, M. A systems design approach for the co-design of a humanoid robot arm. arXiv 2022, arXiv:2212.14256. [Google Scholar]
- Lambe, A.B.; Martins, J.R.R.A. Extensions to the Design Structure Matrix for the Description of Multidisciplinary Design, Analysis, and Optimization Processes. Struct. Multidiscip. Optim. 2012, 46, 273–284. [Google Scholar] [CrossRef]
- Liu, S.B.; Althoff, M. Optimizing performance in automation through modular robots. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4044–4050. [Google Scholar] [CrossRef]
- Icer, E.; Althoff, M. Cost-optimal composition synthesis for modular robots. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1408–1413. [Google Scholar]
- Lin, X.; Fernandez, G.I.; Liu, Y.; Zhu, T.; Shirai, Y.; Hong, D. Multi-Modal Multi-Agent Optimization for LIMMS, A Modular Robotics Approach to Delivery Automation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 19–22 September 2022; pp. 12674–12681. [Google Scholar] [CrossRef]
- Kingston, Z.; Moll, M.; Kavraki, L.E. Exploring Implicit Spaces for Constrained Sampling-Based Planning. Int. J. Robot. Res. 2019, 38, 1151–1178. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence, Global Edition A Modern Approach; Pearson Deutschland: Upper Saddle River, NJ, USA, 2021; p. 1168. [Google Scholar]
- Hartmann, V.N.; Orthey, A.; Driess, D.; Oguz, O.S.; Toussaint, M. Long-horizon multi-robot rearrangement planning for construction assembly. IEEE Trans. Robot. 2022, 39, 239–252. [Google Scholar] [CrossRef]
- Tedrake, R.; The Drake Development Team. Drake: Model-Based Design and Verification for Robotics. 2019. Available online: https://drake.mit.edu/ (accessed on 16 June 2023).
- Srinivas G, L.; Javed, A. Topology Optimization of KUKA KR16 Industrial Robot Using Equivalent Static Load Method. In Proceedings of the 2021 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 21–24 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Muralidharan, V.; Bose, A.; Chatra, K.; Bandyopadhyay, S. Methods for dimensional design of parallel manipulators for optimal dynamic performance over a given safe working zone. Mech. Mach. Theory 2020, 147, 103721. [Google Scholar] [CrossRef]
- Frank, J.; Ma, D.; Zimmermann, M. Topology optimization subject to anisotropic stiffness constraints for the lightweight design of vibrating structures. In Proceedings of the International Conference on Noise and Vibration, Leuven, Belgium, 12–14 September 2022; pp. 3437–3448. [Google Scholar]
- Mayer, M.; Külz, J.; Althoff, M. CoBRA: A Composable Benchmark for Robotics Applications. arXiv 2022, arXiv:2203.09337. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Outputs | ||
|---|---|---|---|
| M | Set of all the modules | Selected modules | |
| c | Set of all the connection rules | Nominal control DV values | |
| , | Control DV bounds | Selected composition | |
| at each joint | q | Robot poses | |
| End-effector displacement | Interface wrenches | ||
| threshold | Component critical | ||
| Total cycle time | compliance | ||
| to complete the task | Optimised topologies | ||
| Desired end-effector | Optimised mass | ||
| poses | Realised topologies | ||
| Total budget | Realised mass |
| ID | Quantites of Interest | Step | Variable | Min | Max | Unit |
|---|---|---|---|---|---|---|
| 1 | Time to complete the task | 4 | ||||
| 2 | Error in the end-effector positions | |||||
| 3 | Cost of the robot | min | - | |||
| 4 | The end-effector deflection for a 1 kg payload | |||||
| 5 | Total mass of the robot | m | min | kg |
| Link Module i | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| (mJ) | 9.3 | 6.2 | 3.1 | 3.1 |
| (mm) | 150 | 100 | 50 | 50 |
| Link Module (i) | 1 | 2 | 3 | 4 | Total |
|---|---|---|---|---|---|
| (mm) | 0.39 | 0.10 | 0.02 | 0.01 | - |
| (mm) | 0.50 | 0.50 | 0.50 | 0.50 | - |
| (kg) | 0.14 | 0.13 | 0.11 | 0.11 | 0.49 |
| (The Rigid 10k material from Formlabs) (kg) | 0.18 | 0.10 | 0.07 | 0.07 | 0.42 |
| Category of cost | Amount (EUR) |
| Cost of purchased parts | EUR 1110.21 |
| Cost of 3D-printed components | EUR 123.95 |
| Direct cost of the materials | EUR 1234.16 |
| Additional material costs | EUR 98.73 |
| Material costs | EUR 1332.90 |
| Manufacturing labour costs | EUR 426.67 |
| Machine costs | EUR 102.98 |
| Manufacturing development costs | EUR 476.63 |
| Additional manufacturing costs | EUR 7.16 |
| Manufacturing costs | EUR 1013.37 |
| Production costs | EUR 2346.38 |
| Development and construction costs | EUR 234.64 |
| Administrative and selling overhead | EUR 281.57 |
| Cost of the robot sold | EUR 2862.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sathuluri, A.; Sureshbabu, A.V.; Frank, J.; Amm, M.; Zimmermann, M. Computational Systems Design of Low-Cost Lightweight Robots. Robotics 2023, 12, 91. https://doi.org/10.3390/robotics12040091
Sathuluri A, Sureshbabu AV, Frank J, Amm M, Zimmermann M. Computational Systems Design of Low-Cost Lightweight Robots. Robotics. 2023; 12(4):91. https://doi.org/10.3390/robotics12040091
Chicago/Turabian StyleSathuluri, Akhil, Anand Vazhapilli Sureshbabu, Jintin Frank, Maximilian Amm, and Markus Zimmermann. 2023. "Computational Systems Design of Low-Cost Lightweight Robots" Robotics 12, no. 4: 91. https://doi.org/10.3390/robotics12040091
APA StyleSathuluri, A., Sureshbabu, A. V., Frank, J., Amm, M., & Zimmermann, M. (2023). Computational Systems Design of Low-Cost Lightweight Robots. Robotics, 12(4), 91. https://doi.org/10.3390/robotics12040091