

Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses



Abstract
:1. Introduction
2. Materials and Methods
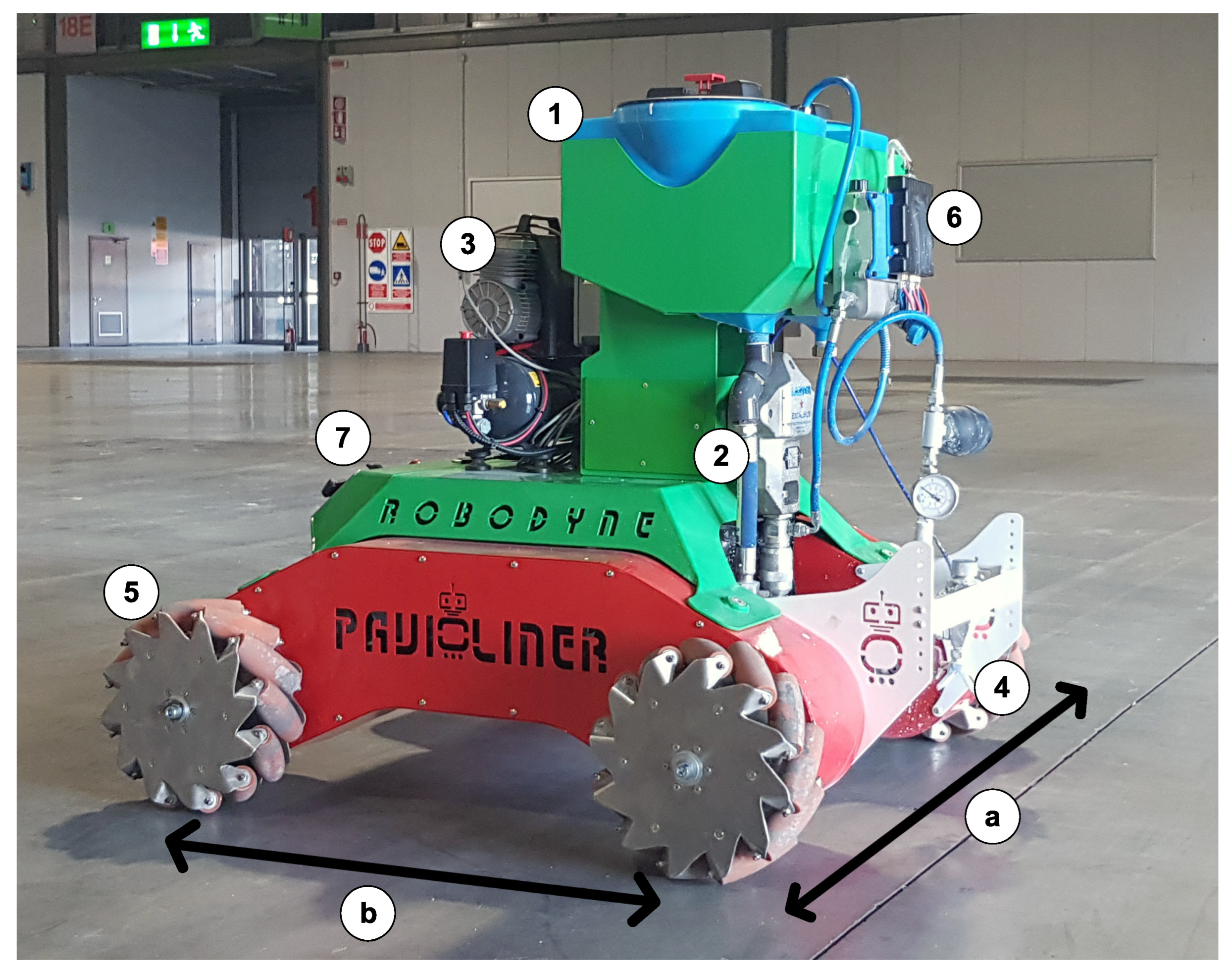
2.1. The Omnidirectional Robot
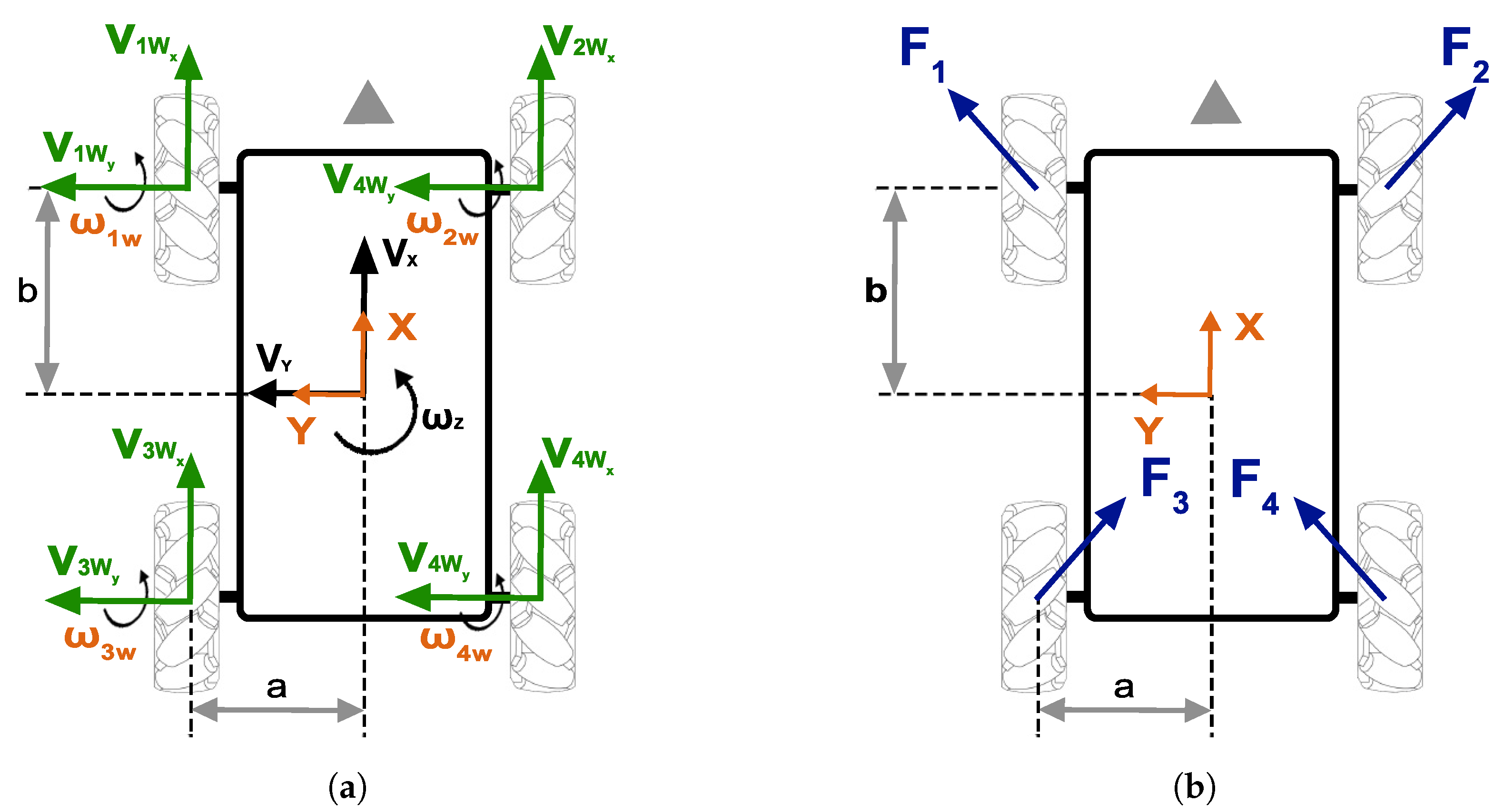
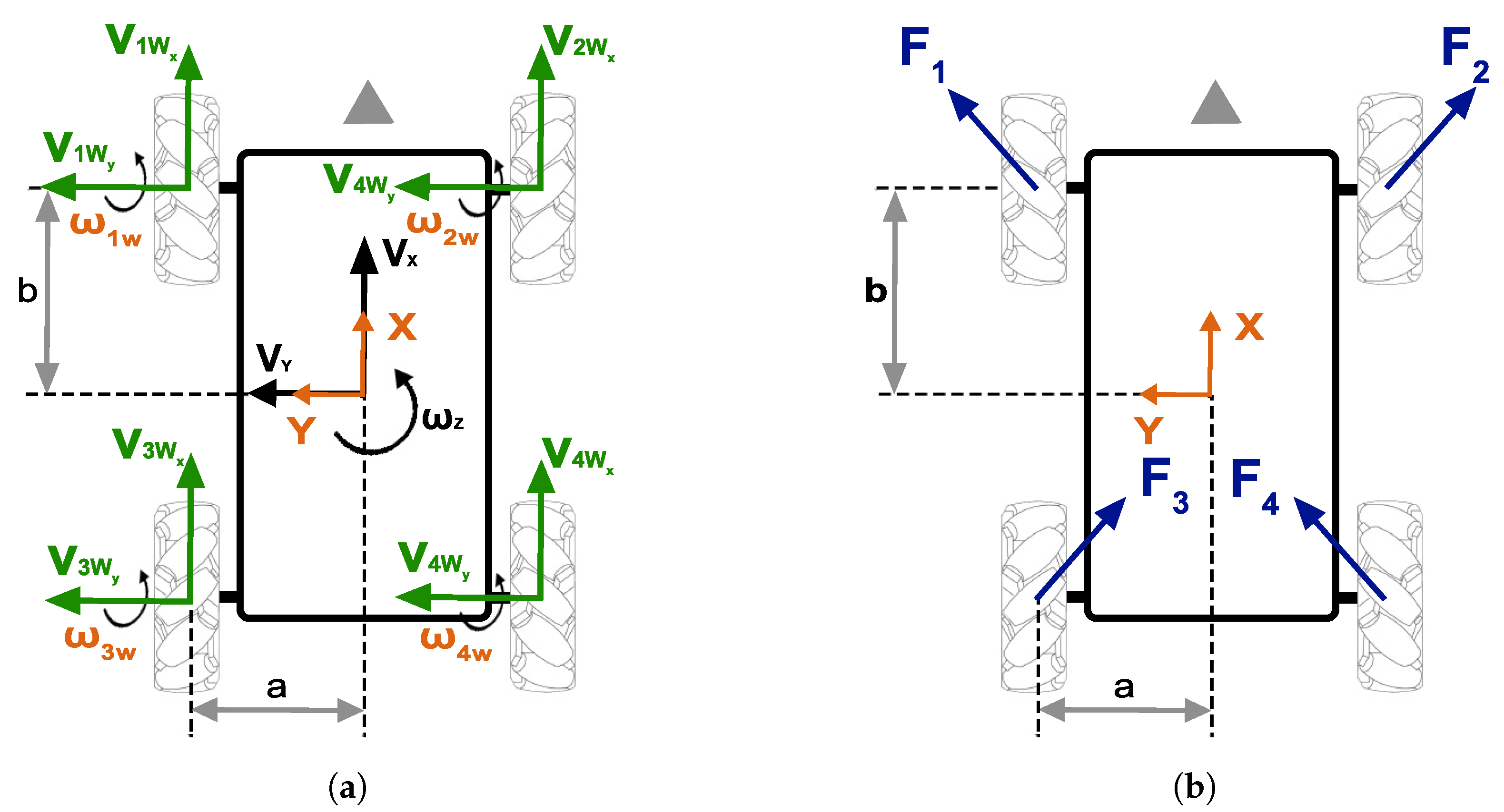
2.2. The Robot Model
2.3. The Predictive Controller
2.4. Non-Linear Predictive Model Control (NMPC)
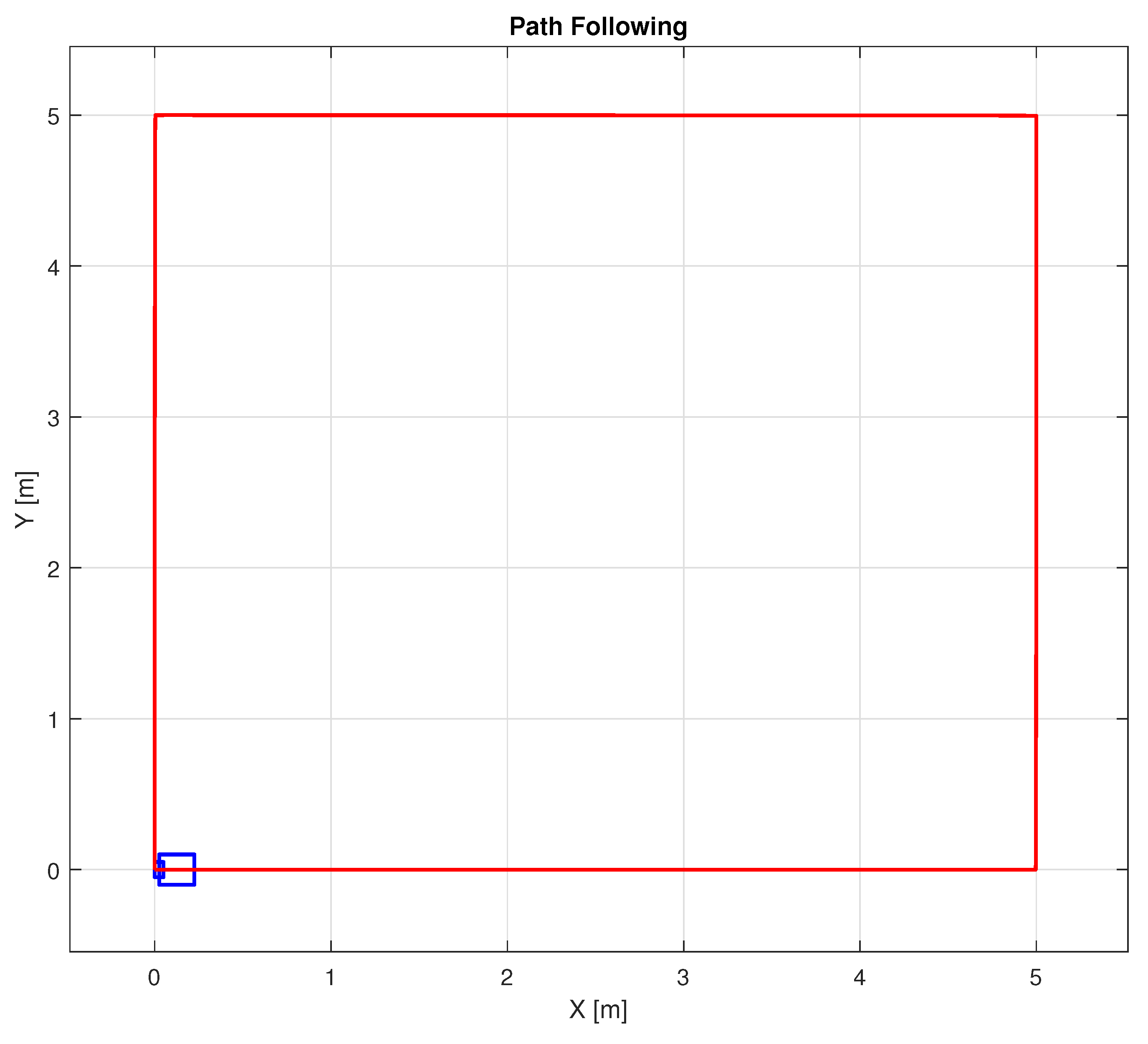
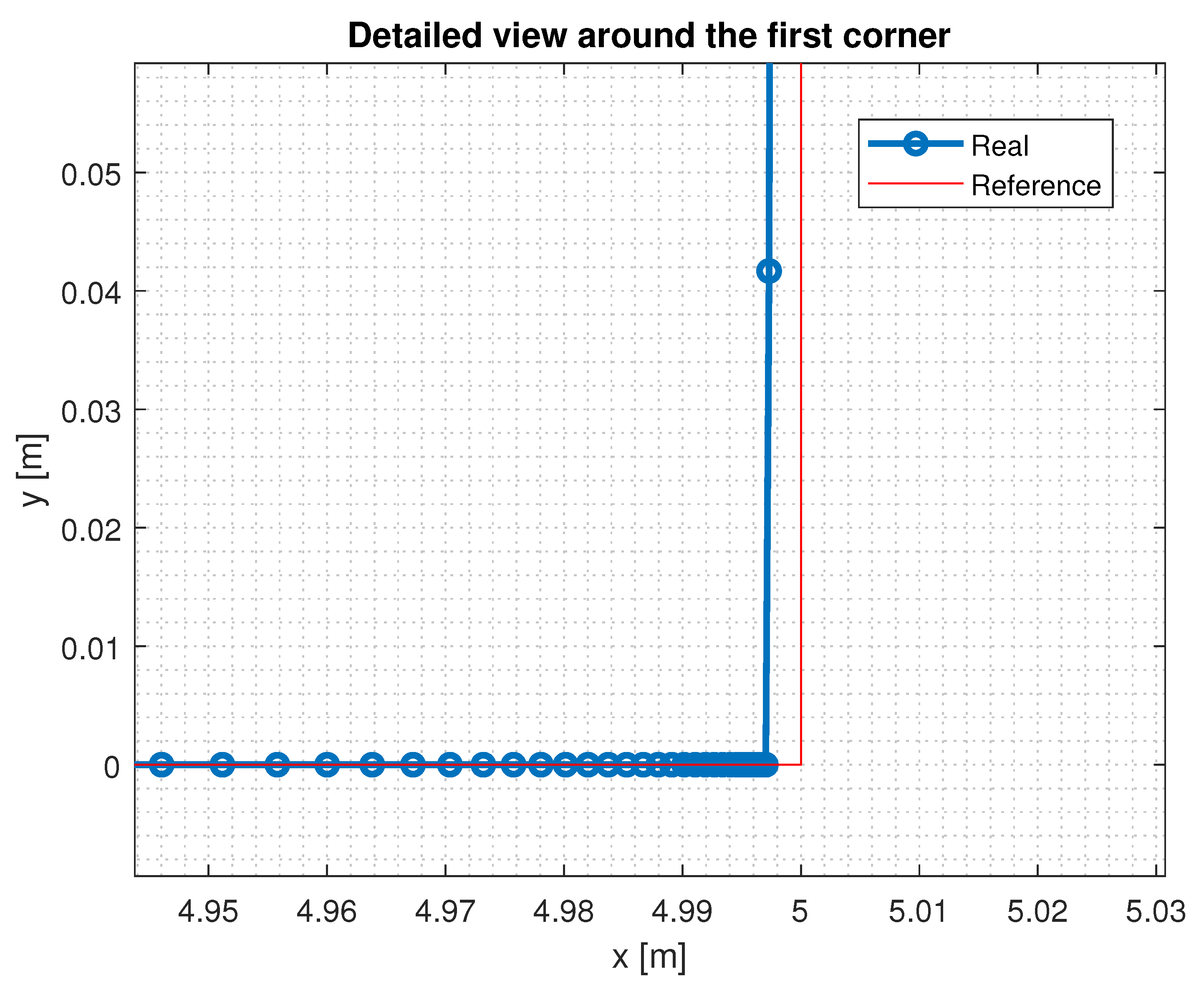
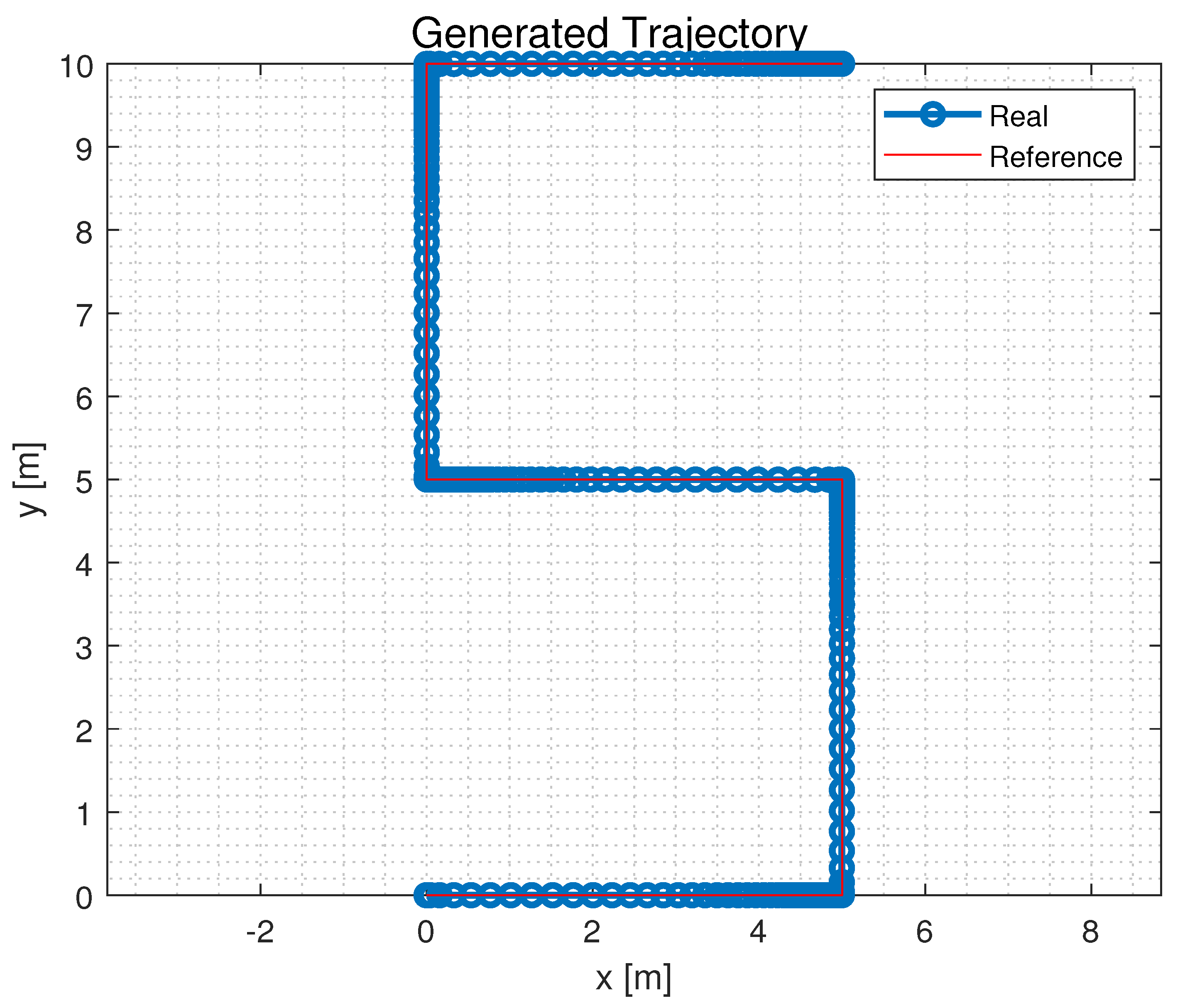
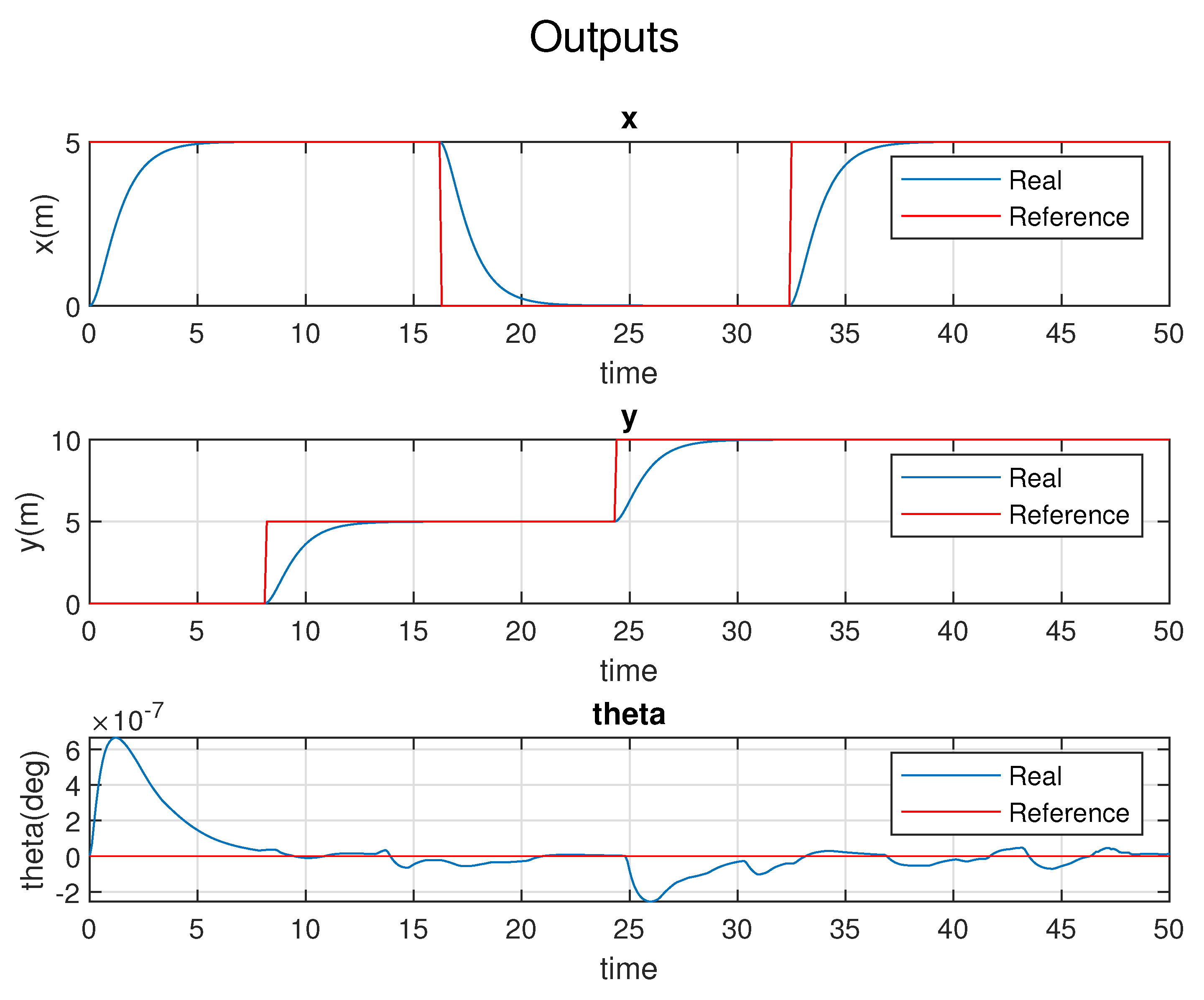
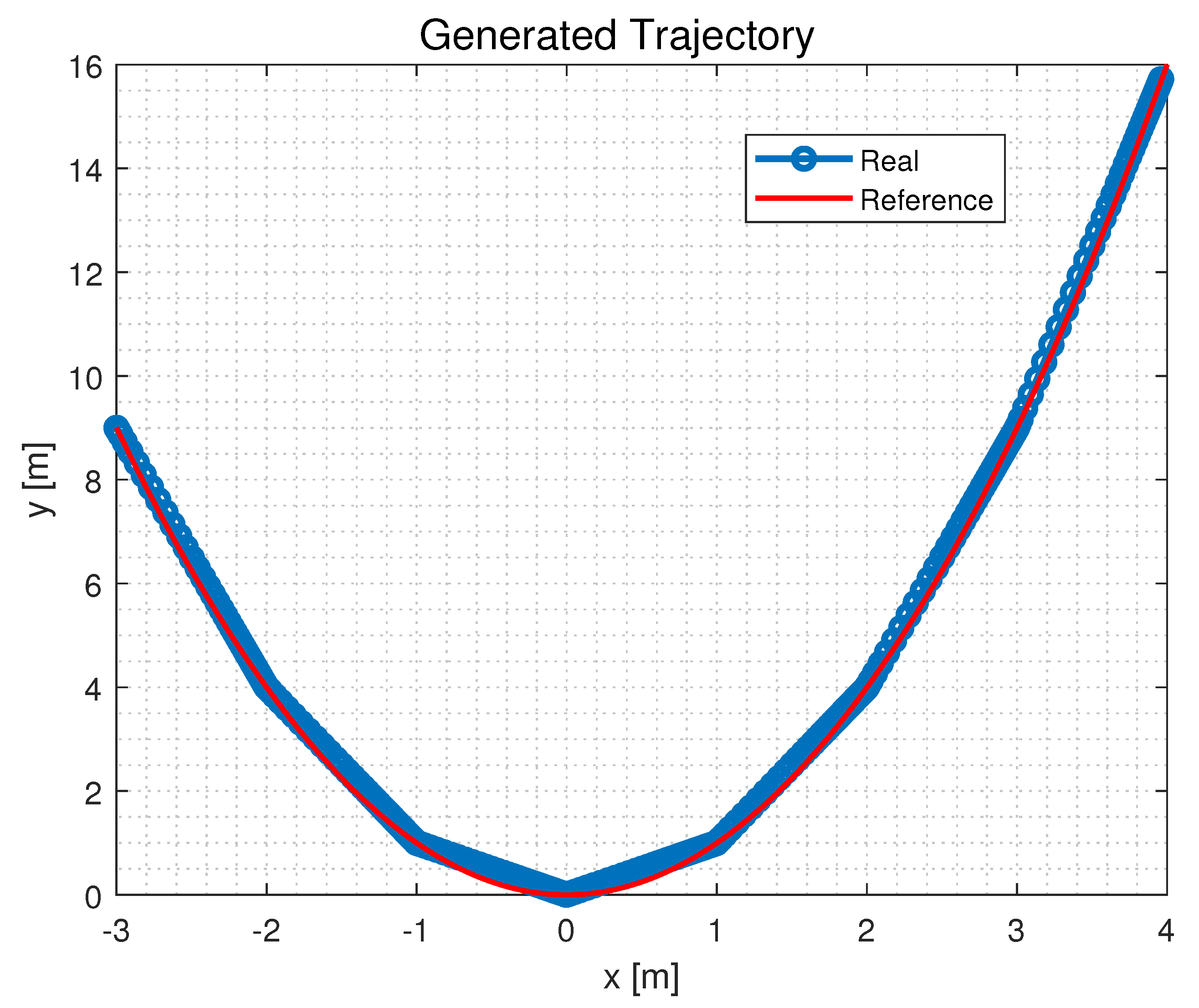
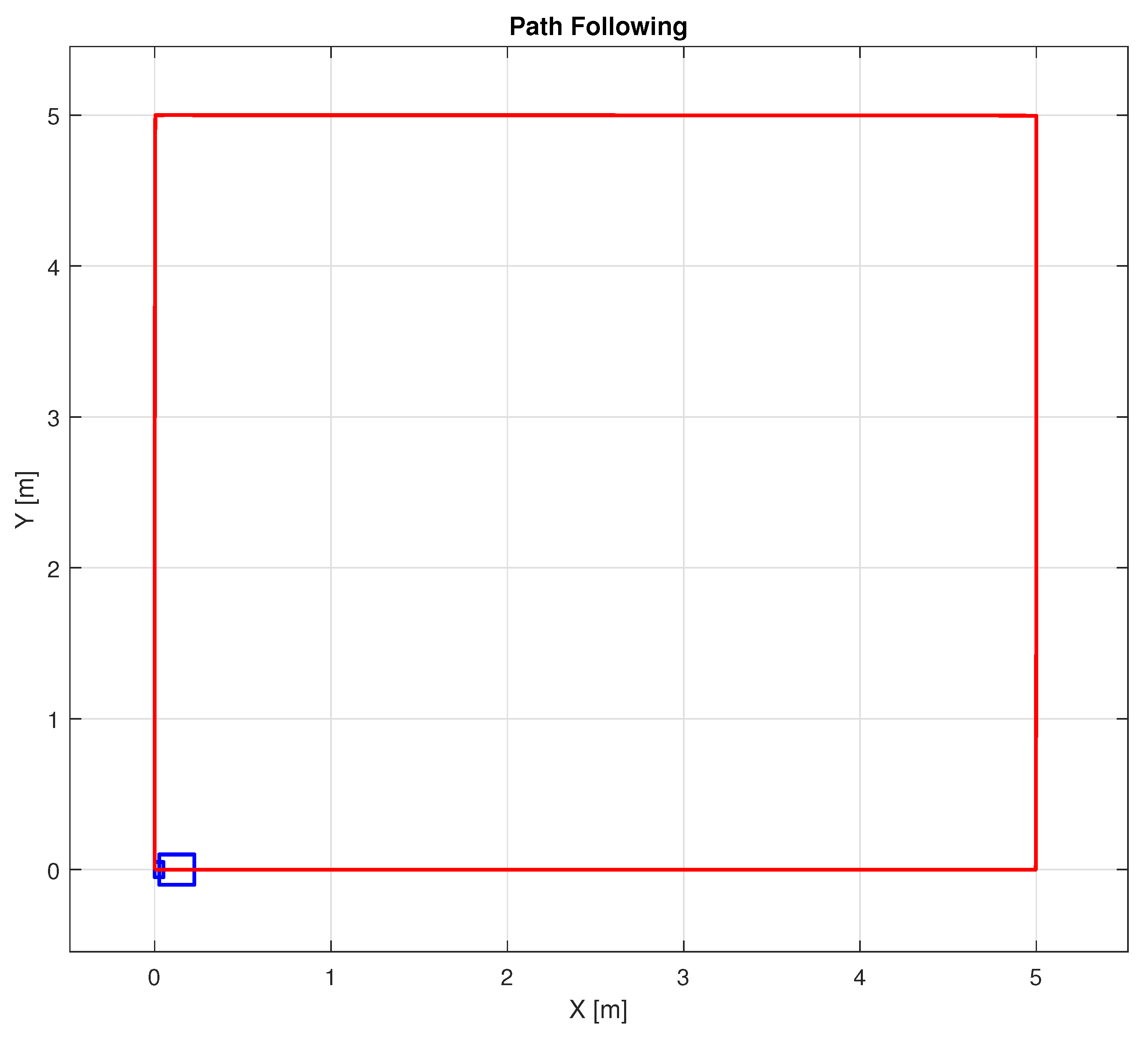
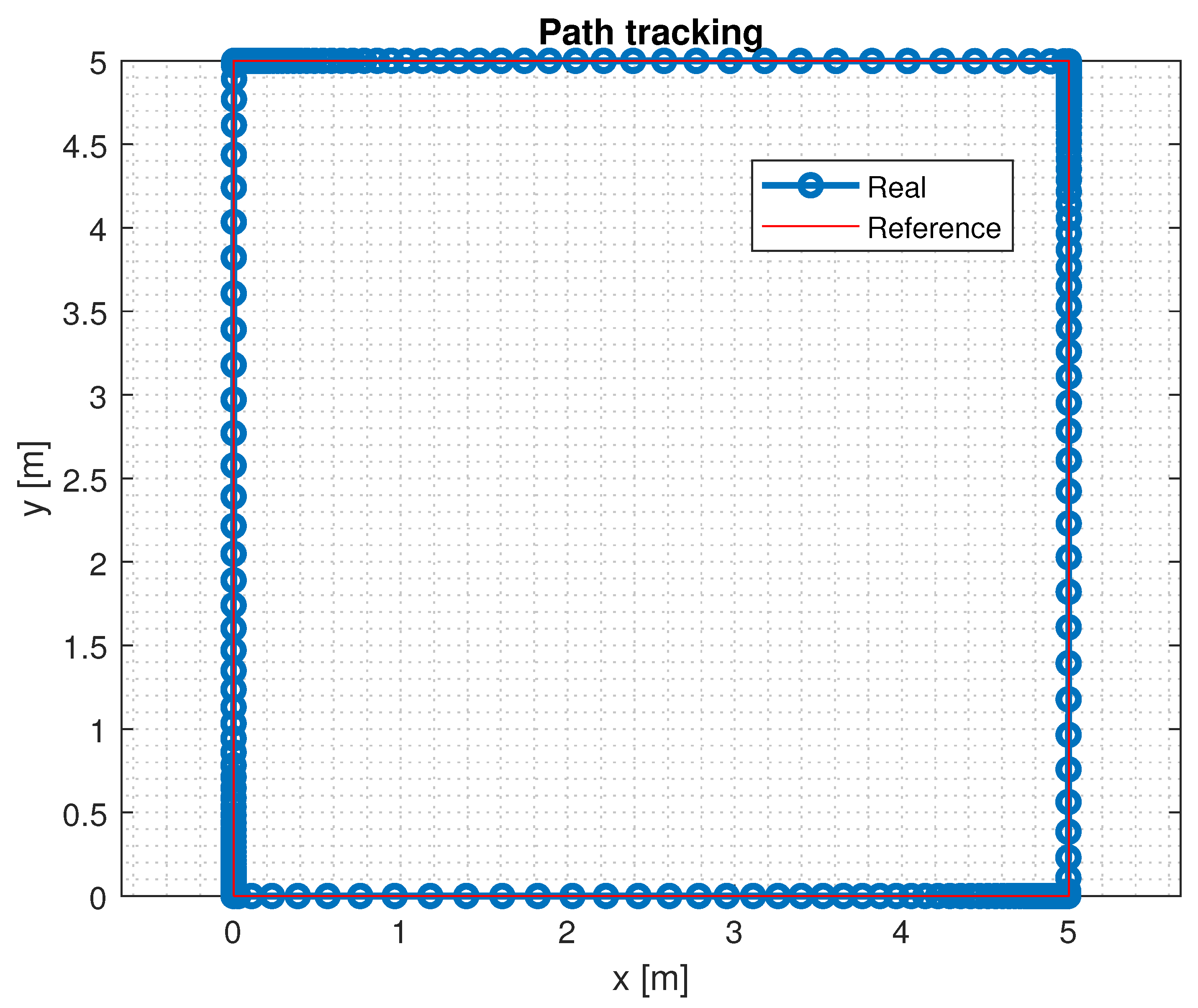
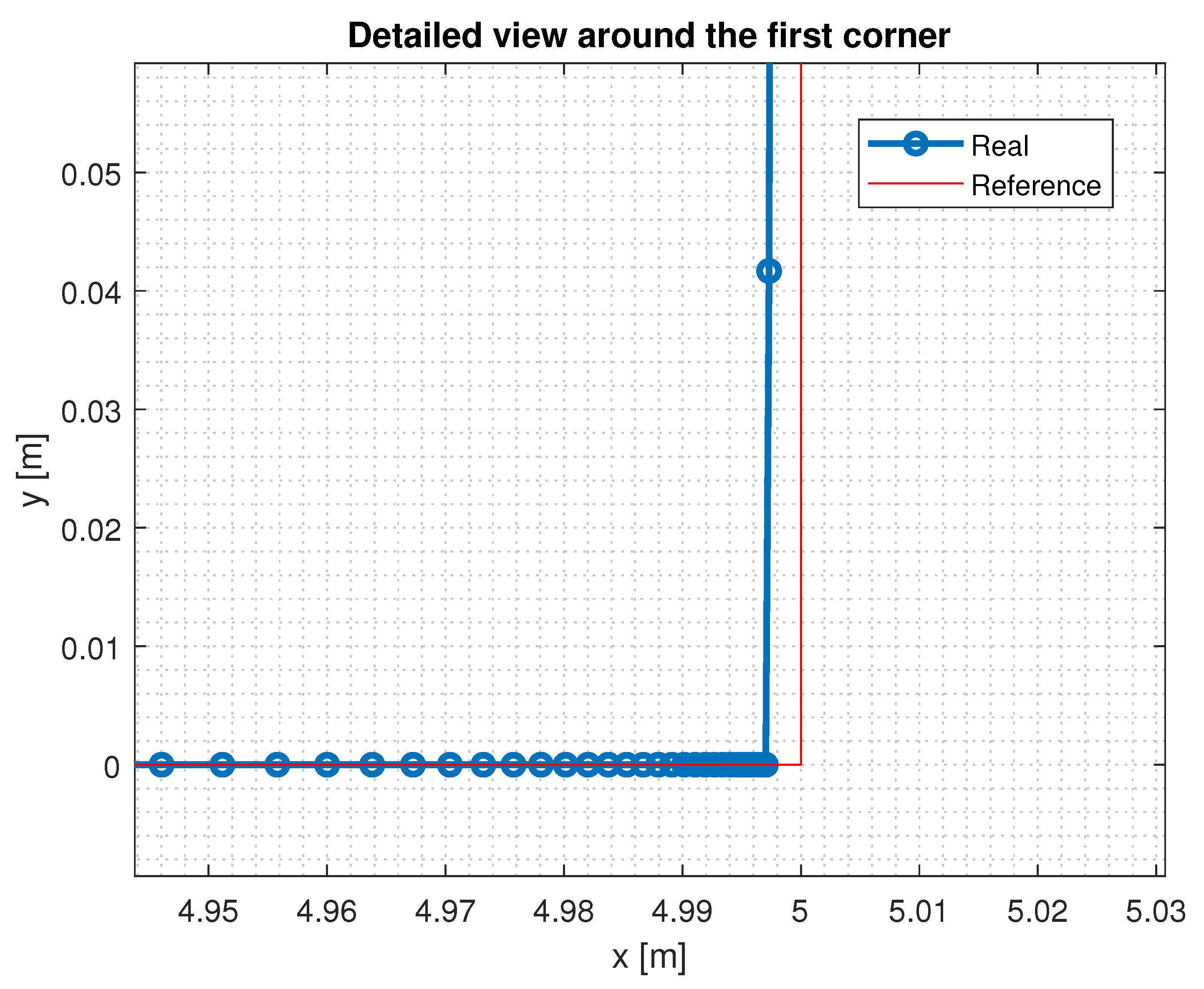
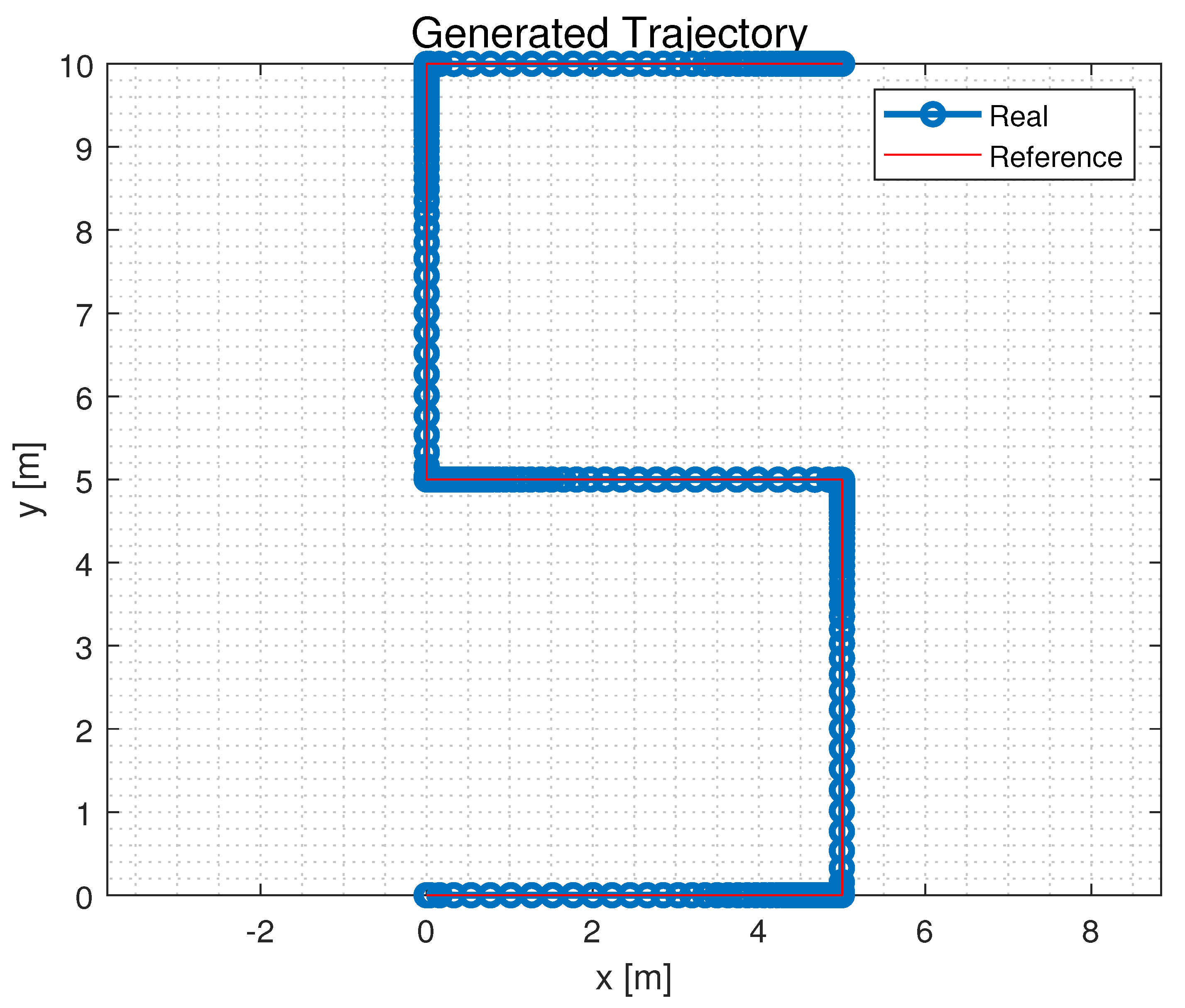
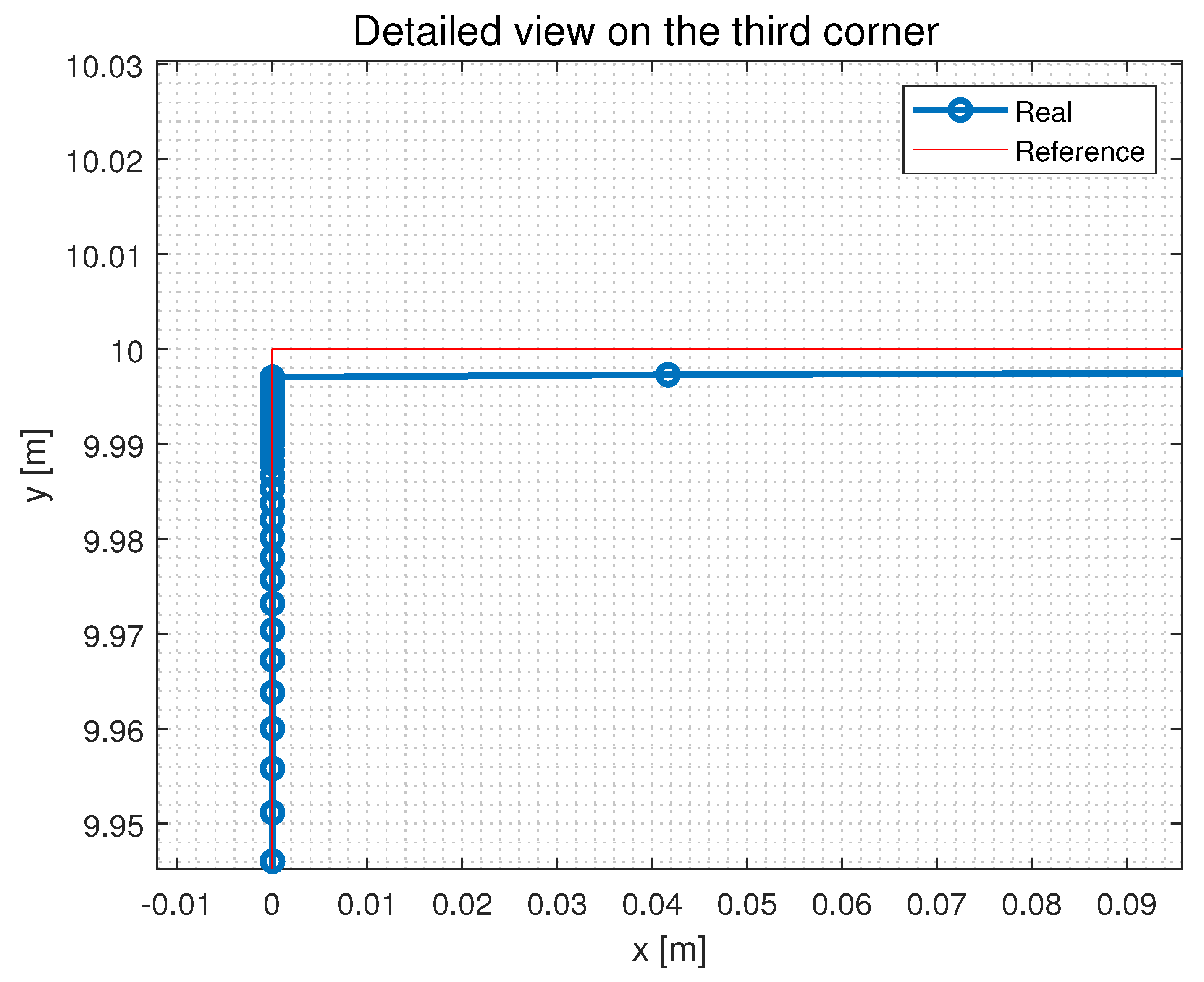
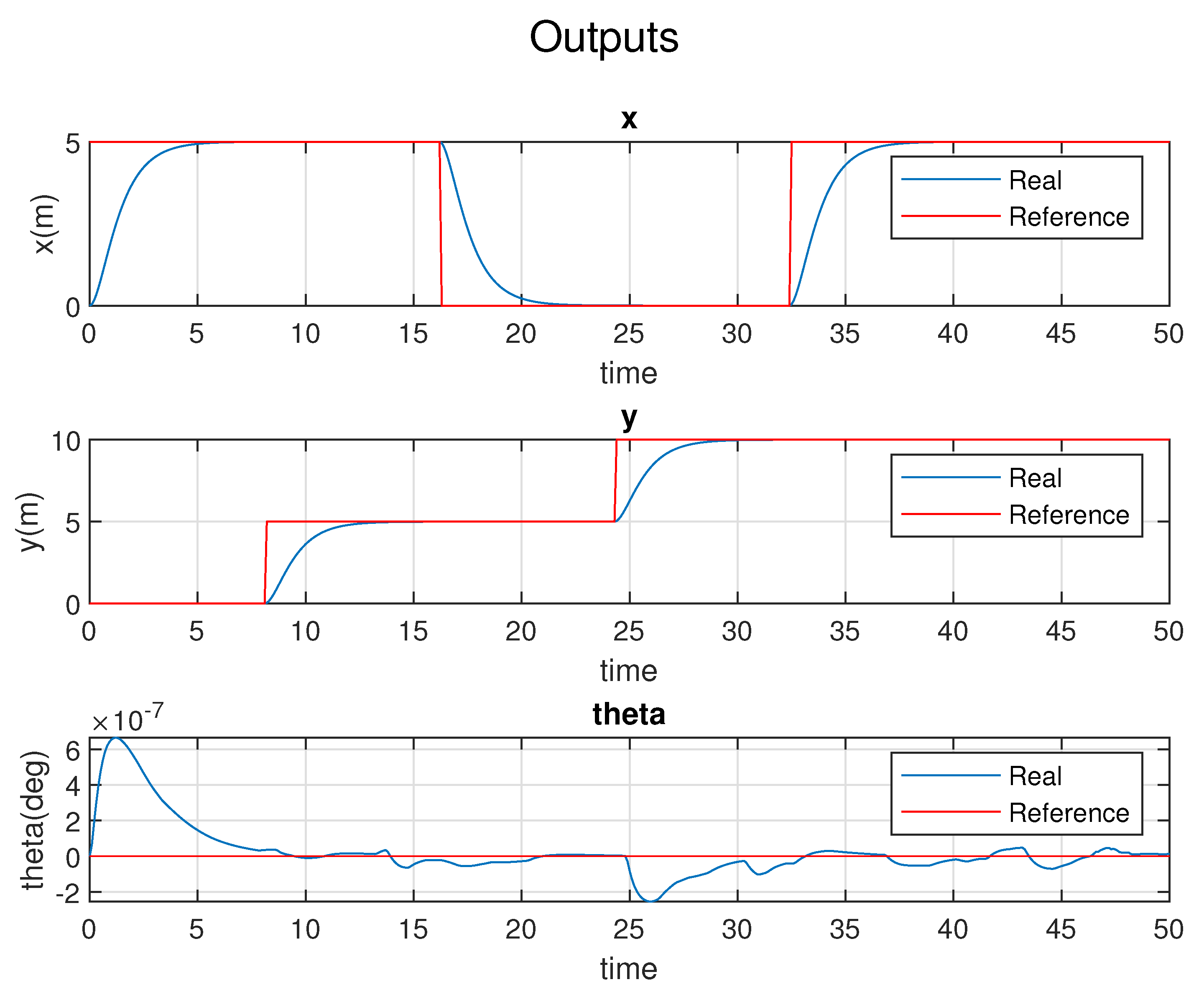
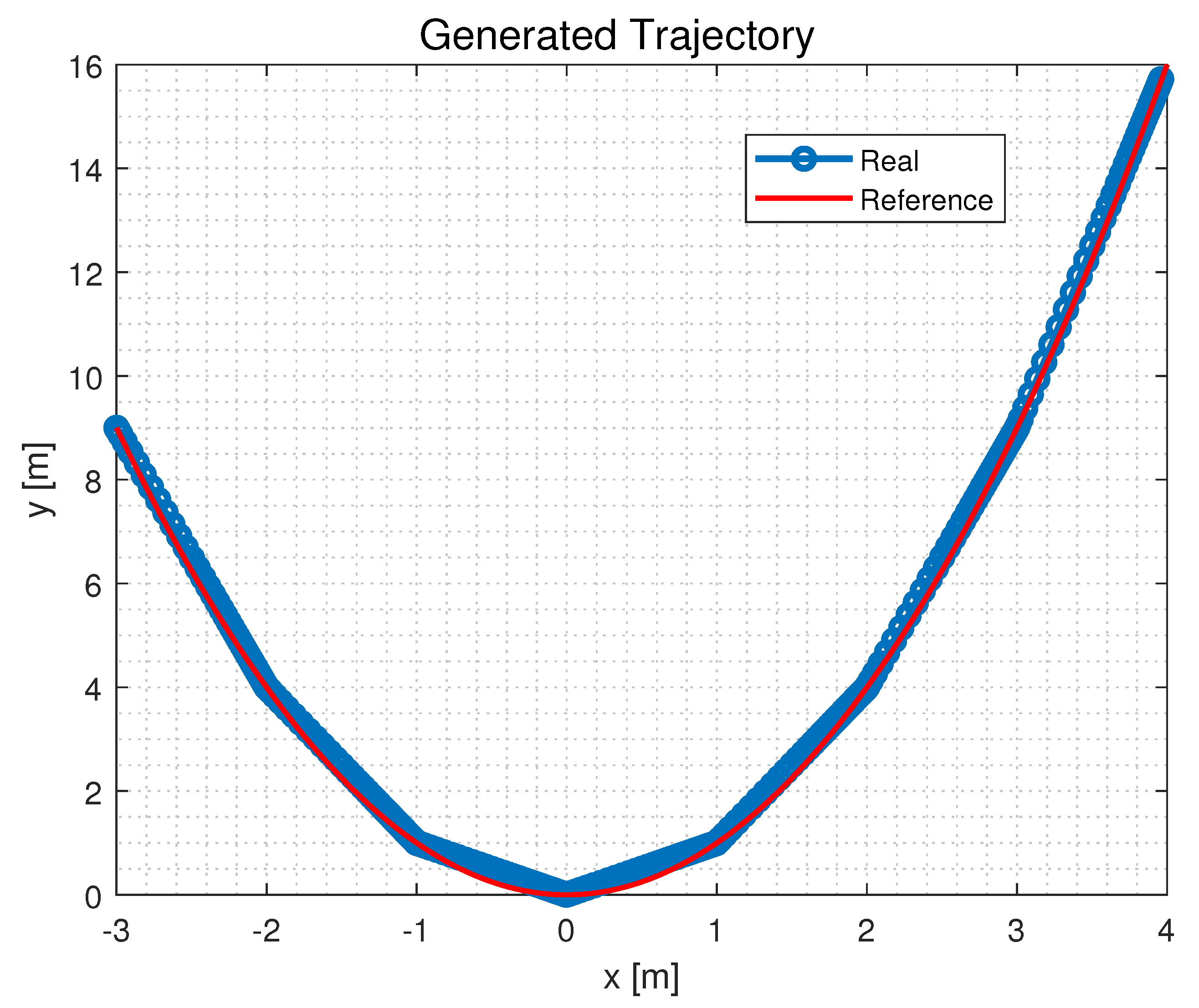
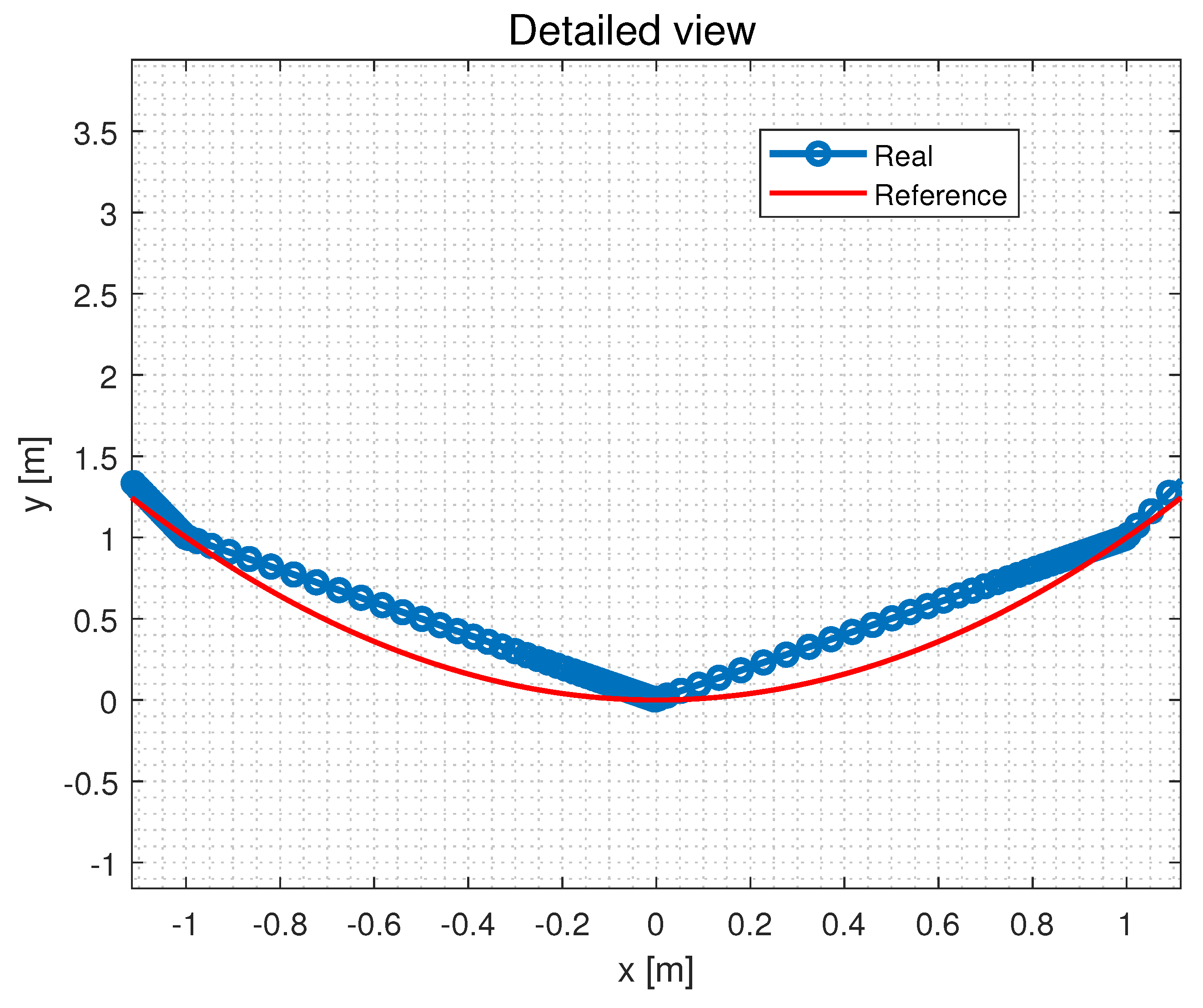
3. Results for the NMPC Algorithm
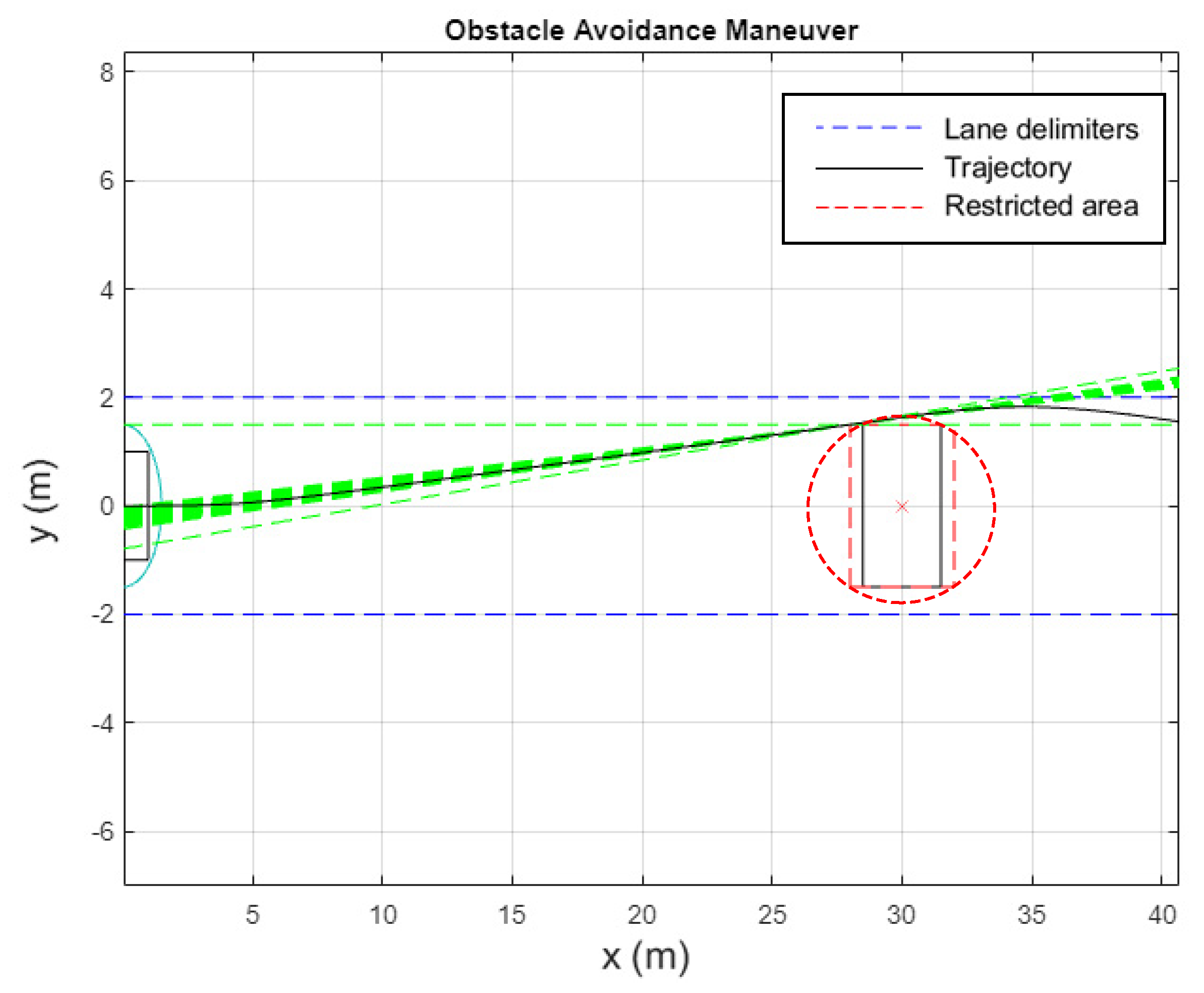
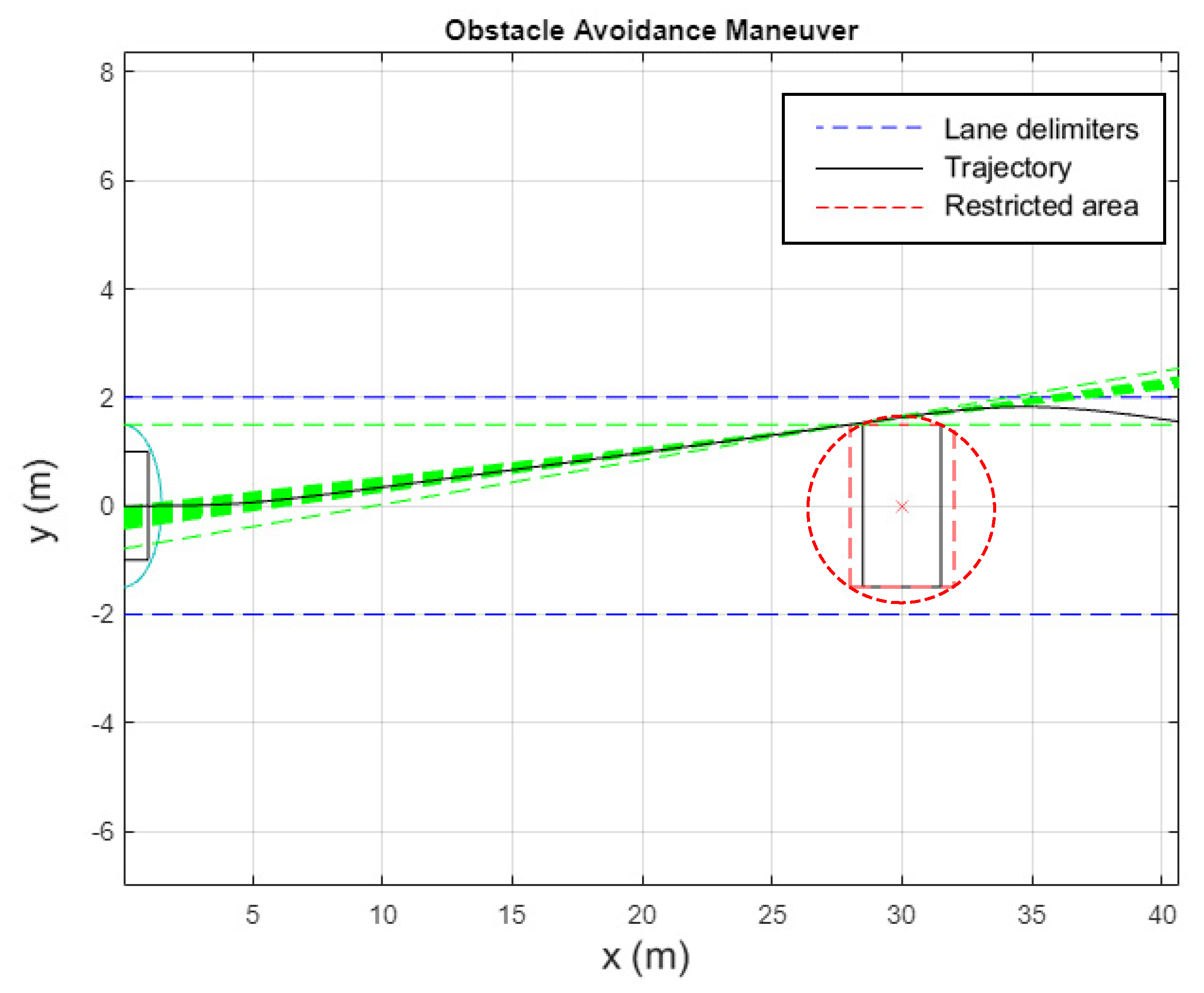
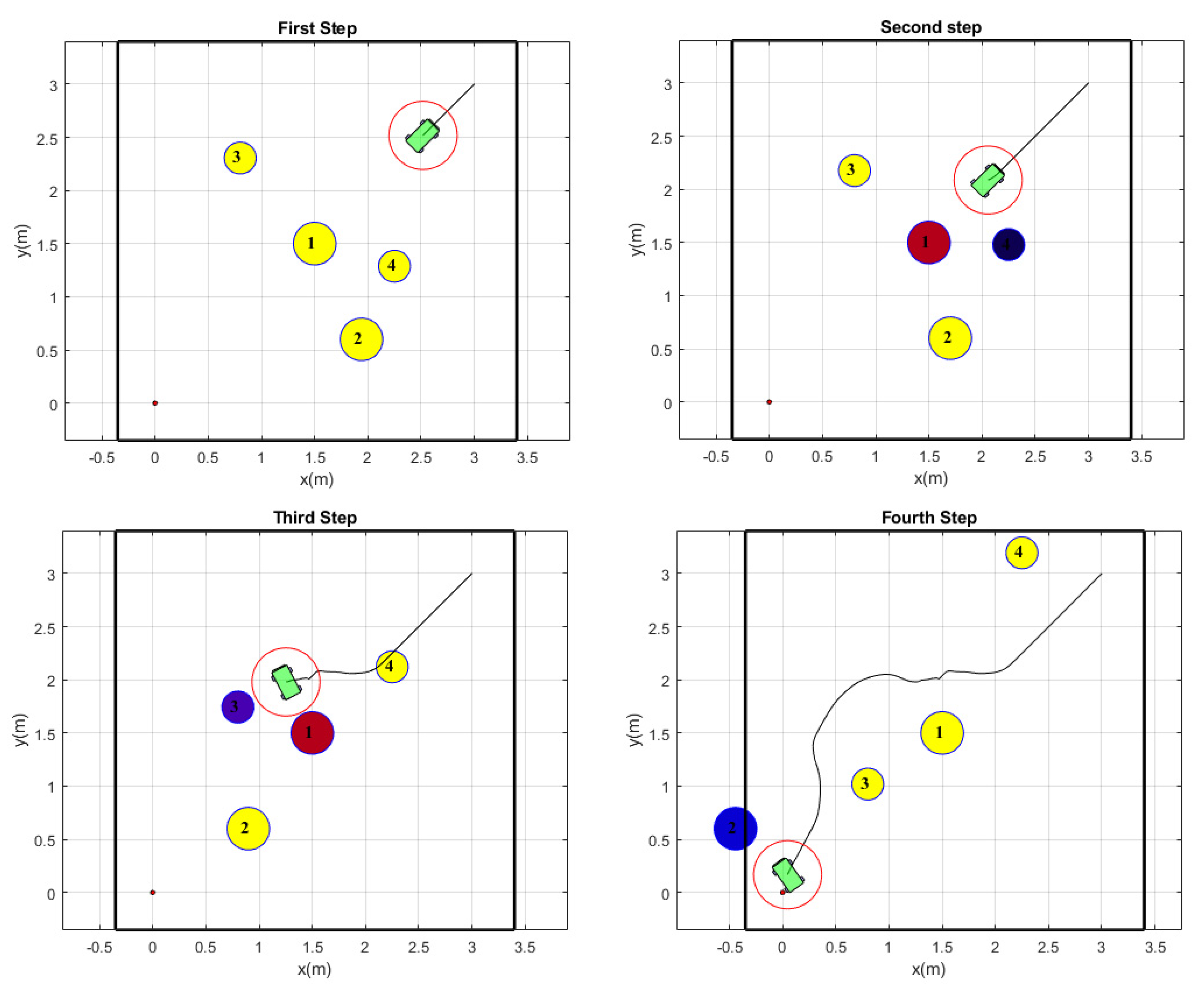
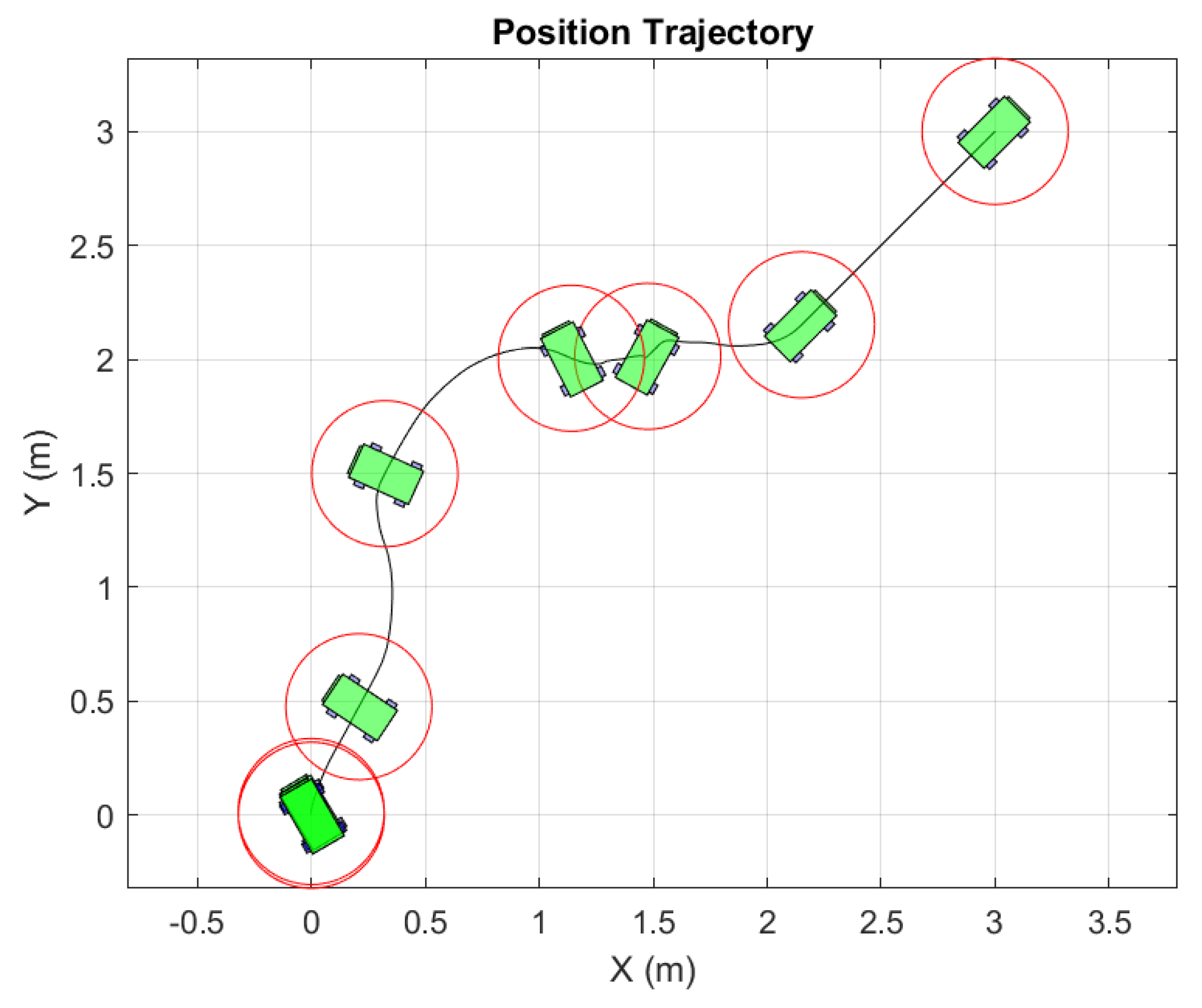
Collision Avoidance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Galati, R.; Mantriota, G.; Reina, G. Design and Development of a Tracked Robot to Increase Bulk Density of Flax Fibers. J. Mech. Robot. 2021, 13, 050903. [Google Scholar] [CrossRef]
- Fernando, Y.; Mathath, A.; Murshid, M. Improving Productivity:: A Review of Robotic Applications in Food Industry. Int. J. Robot. Appl. Technol. 2016, 4, 43–62. [Google Scholar] [CrossRef]
- David, W.; Rovida, F.; Fumagalli, M.; Krueger, V. Productive Multitasking for Industrial Robots. arXiv 2021, arXiv:2108.11471. [Google Scholar]
- Galati, R.; Mantriota, G.; Reina, G. Adaptive heading correction for an industrial heavy-duty omnidirectional robot. Sci. Rep. 2022, 12, 19608. [Google Scholar] [CrossRef] [PubMed]
- Voccia, S.; Campbell, A.; Thomas, B. The Same-Day Delivery Problem for Online Purchases 2015. Transp. Sci. 2017, 53, 167–184. [Google Scholar] [CrossRef]
- Omoruyi, O. Competitiveness Through the Integration of Logistics Activities in SMEs. Stud. Univ.-Babes-Bolyai Oeconomica 2018, 63, 15–32. [Google Scholar] [CrossRef]
- Mikušová, N.; Čujan, Z.; Tomková, E. Robotization of Logistics Processes. MATEC Web Conf. 2017, 134, 00038. [Google Scholar] [CrossRef]
- Liu, Y.t.; Sun, R.z.; Zhang, T.y.; Zhang, X.n.; Li, L.; Shi, G.q. Warehouse-Oriented Optimal Path Planning for Autonomous Mobile Fire-Fighting Robots. Secur. Commun. Netw. 2020, 2020, 6371814. [Google Scholar] [CrossRef]
- Duan, L.M. Path Planning for Batch Picking of Warehousing and Logistics Robots Based on Modified A* Algorithm. Acad. J. Manuf. Eng. 2018, 16, 99–106. [Google Scholar] [CrossRef]
- Palleschi, A.; Hamad, M.; Abdolshah, S.; Garabini, M.; Haddadin, S.; Pallottino, L. Optimal Trajectory Planning with Safety Constraints. In Proceedings of the 2021 I-RIM Conference, Rome, Italy, 8–10 October 2021. [Google Scholar] [CrossRef]
- Andreasson, H.; Grisetti, G.; Stoyanov, T.; Pretto, A. Sensors for Mobile Robots. arXiv 2022, arXiv:2206.03223. [Google Scholar] [CrossRef]
- Balatti, P.; Fusaro, F.; Villa, N.; Lamon, E.; Ajoudani, A. A Collaborative Robotic Approach to Autonomous Pallet Jack Transportation and Positioning. IEEE Access 2020, 8, 42191–142204. [Google Scholar] [CrossRef]
- Li, J.t. Design Optimization of Amazon Robotics. Autom. Control. Intell. Syst. 2016, 4, 48. [Google Scholar] [CrossRef]
- Nguyen, H.; Rego, F.; Quintas, J.; Pascoal, A. A review of path following control strategies for autonomous robotic vehicles: Theory, simulations, and experiments. J. Field Robot. 2022, 40, 747–779. [Google Scholar] [CrossRef]
- Hogg, R.; Rankin, A.; Roumeliotis, S.; Mchenry, M.; Helmick, D.; Bergh, C.; Matthies, L. Algorithms and sensors for small robot path following. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 3850–3857. [Google Scholar] [CrossRef]
- Atyabi, A.; Powers, D. Review of classical and heuristic-based navigation and path planning approaches. Int. J. Adv. Comput. Technol. (IJACT) 2013, 5, 1–14. [Google Scholar]
- Do, H.; Tehrani, H.; Yoneda, K.; Ryohei, S.; Mita, S. Vehicle path planning with maximizing safe margin for driving using Lagrange multipliers. In Proceedings of the Intelligent Vehicles Symposium (IV), Gold Coast City, Australia, 23–26 June 2013; pp. 171–176. [Google Scholar] [CrossRef]
- Galati, R.; Mantriota, G.; Reina, G. Nonlinear Model Predictive Control Of Omnidirectional Robots Using A Spraying Unit. In Proceedings of the Jc-IFToMM International Symposium, Kyoto, Japan, 16 July 2022; Volume 5, pp. 103–109. [Google Scholar] [CrossRef]
- Galati, R.; Mantriota, G.; Reina, G. Mobile Robotics for Sustainable Development: Two Case Studies. In Proceedings of the I4SDG Workshop 2021, IFToMM for Sustainable Development Goals, online, 25–26 November 2021; pp. 372–382. [Google Scholar] [CrossRef]
- Galati, R.; Reina, G. Terrain awareness using a tracked skid-steering vehicle with passive independent suspensions. Front. Robot. AI 2019, 6, 46. [Google Scholar] [CrossRef]
- Andrejic, M.; Kilibarda, M.; Pajić, V. A framework for assessing logistics costs. In Quantitative Models in Economics; University of Belgrade: Beograd, Serbia, 2018; pp. 361–377. [Google Scholar]
- Li, J.; Ran, M.; Wang, H.; Xie, L. MPC-based Unified Trajectory Planning and Tracking Control Approach for Automated Guided Vehicles*. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 374–380. [Google Scholar] [CrossRef]
- Yu, C.; Zheng, Y.; Shyrokau, B.; Ivanov, V. MPC-based Path Following Design for Automated Vehicles with Rear Wheel Steering. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Nash, A.; Pangborn, H.; Jain, N. Robust Control Co-Design with Receding-Horizon MPC. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 373–379. [Google Scholar] [CrossRef]
- Wikipedia, the Free Encyclopedia. Model Predictive Contro. 2023. Available online: https://en.wikipedia.org/wiki/Model_predictive_control (accessed on 27 April 2023).
- Cannon, M. Efficient nonlinear model predictive control algorithms. Annu. Rev. Control 2004, 28, 229–237. [Google Scholar] [CrossRef]
- Diehl, M.; Ferreau, H.J.; Haverbeke, N. Efficient Numerical Methods for Nonlinear MPC and Moving Horizon Estimation. In Nonlinear Model Predictive Control: Towards New Challenging Applications; Magni, L., Raimondo, D.M., Allgöwer, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 391–417. [Google Scholar] [CrossRef]
- Mcguire, K.; Croon, G.; Tuyls, K. A comparative study of bug algorithms for robot navigation. Robot. Auton. Syst. 2019, 121, 103261. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Omnibot Specifications | Value |
|---|---|
| Driving mode | holonomic with mecanum wheels |
| Total driving motors | 4 |
| Dimensions (a × b) | 1012 × 1038 mm |
| Maximum velocity (any direction) | 1 m/s |
| Maximum Payload | 1000 kg |
| Output power | 4800 W |
| Total weight | 200 kg |
| Set | Parameters | RMS (m) (Best Case) | RMS (m) (Worst Case) |
|---|---|---|---|
| 1 | , , | 0.1620 | 0.4310 |
| 2 | , , | 0.1280 | 0.3150 |
| 3 | , , | 0.1360 | 0.4810 |
| 4 | , , | 0.1820 | 0.1710 |
| 5 | , , | 0.1010 | 0.4210 |
| 6 | , , | 0.1120 | 0.4280 |
| 7 | , , | 0.1110 | 0.4280 |
| 8 | , , | 0.1320 | 0.5220 |
| 9 | , , | 0.1920 | 0.3710 |
| 10 | , , | 0.2020 | 0.6330 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galati, R.; Mantriota, G. Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses. Robotics 2023, 12, 78. https://doi.org/10.3390/robotics12030078
Galati R, Mantriota G. Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses. Robotics. 2023; 12(3):78. https://doi.org/10.3390/robotics12030078
Chicago/Turabian StyleGalati, Rocco, and Giacomo Mantriota. 2023. "Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses" Robotics 12, no. 3: 78. https://doi.org/10.3390/robotics12030078
APA StyleGalati, R., & Mantriota, G. (2023). Path Following for an Omnidirectional Robot Using a Non-Linear Model Predictive Controller for Intelligent Warehouses. Robotics, 12(3), 78. https://doi.org/10.3390/robotics12030078