
Indoor Positioning Systems of Mobile Robots: A Review





Abstract
1. Introduction
- The positioning object must be a mobile robot instead of a drone or an underwater drone.
- The method proposed in the paper should focus on indoor positioning, rather than navigation, mapping, path planning, human–computer interaction, and obstacle avoidance.
- Papers belonging to review and survey types will also be screened out.
- The paper should be written in English.
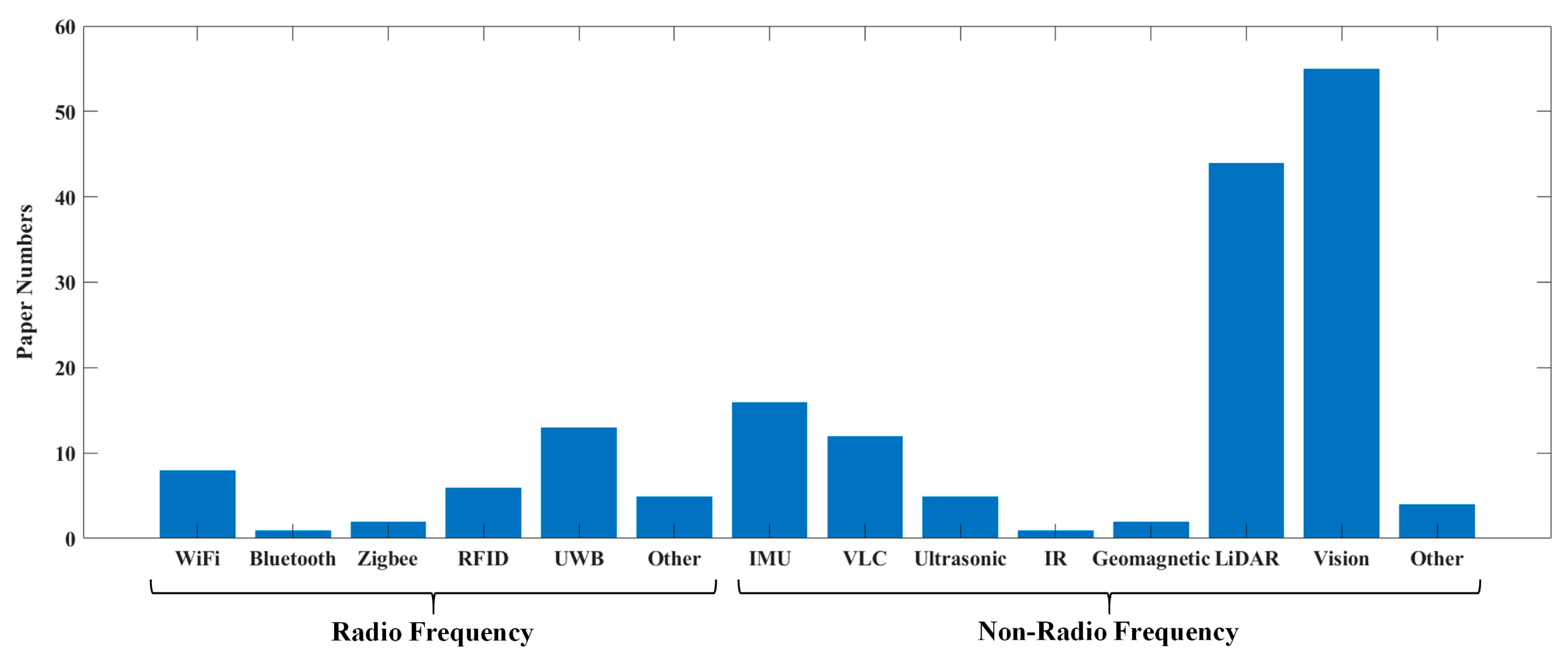
2. Overview of Indoor Positioning Technologies for Mobile Robots
2.1. Non-Radio Frequency Technologies
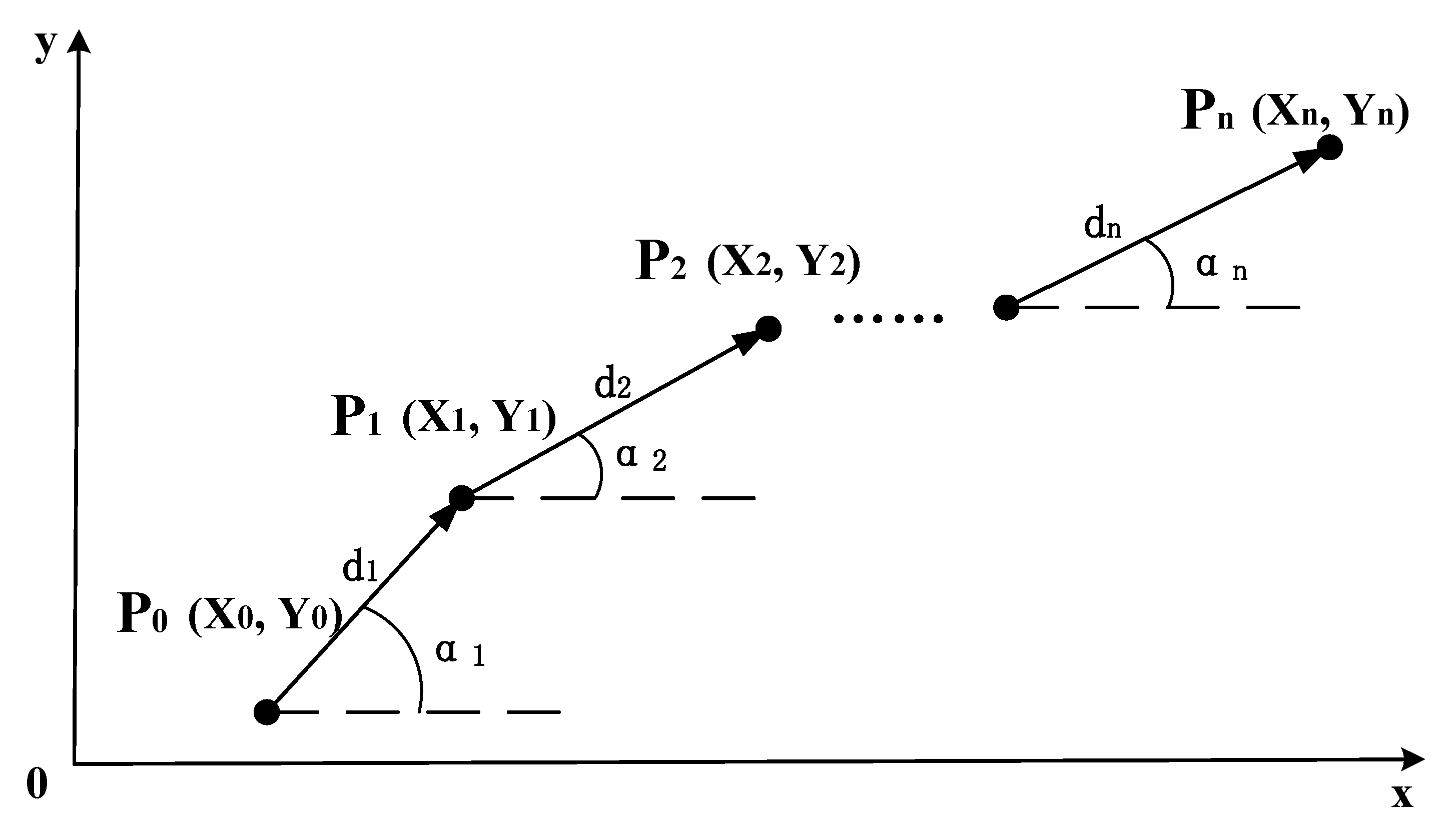
2.1.1. Inertial Measurement Unit
2.1.2. Visible Light Communication
2.1.3. Infrared Detection Technologies
2.1.4. Ultrasonic Detection Technologies
2.1.5. Geomagnetic Field Detection Technologies
2.1.6. LiDAR Detection Technologies
2.1.7. Computer Vision Detection Technologies
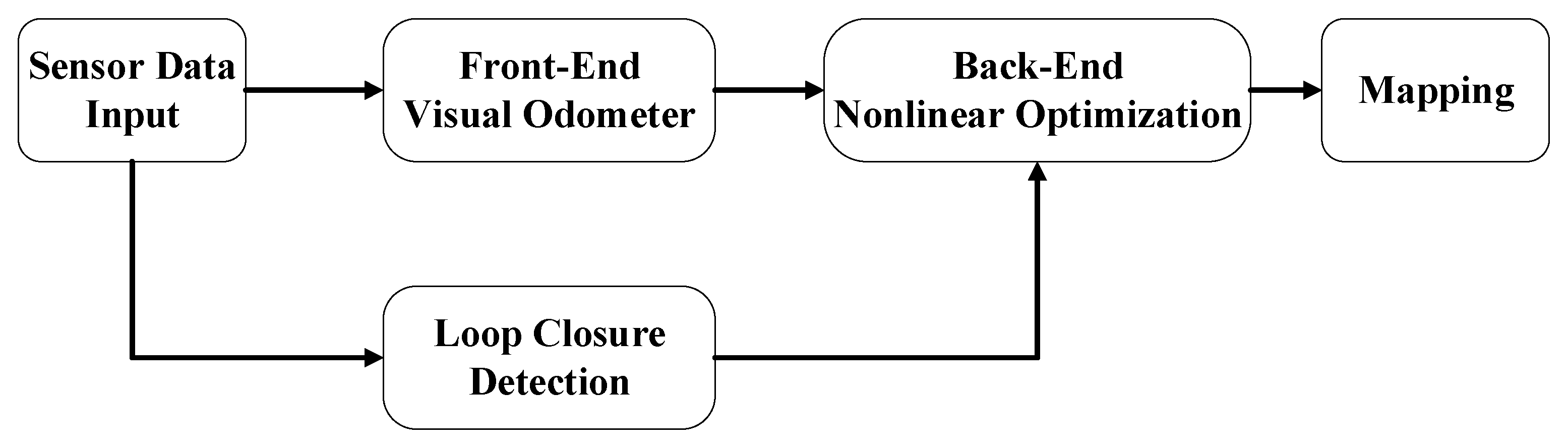
- Sensor data input: Environmental data collected by the camera. Occasionally, the IMU is used as a secondary sensor.
- Front-end visual odometer: Preliminary camera poses estimation based on image information of adjacent video frames.
- Back-end nonlinear optimization: optimize the camera pose obtained by the front-end to reduce the global error.
- Loop closure detection: According to the image to determine whether to reach the previous position. Form a closed loop.
- Mapping: Build a map of the environment based on continuous pose estimates.
2.2. Radio Frequency Technologies
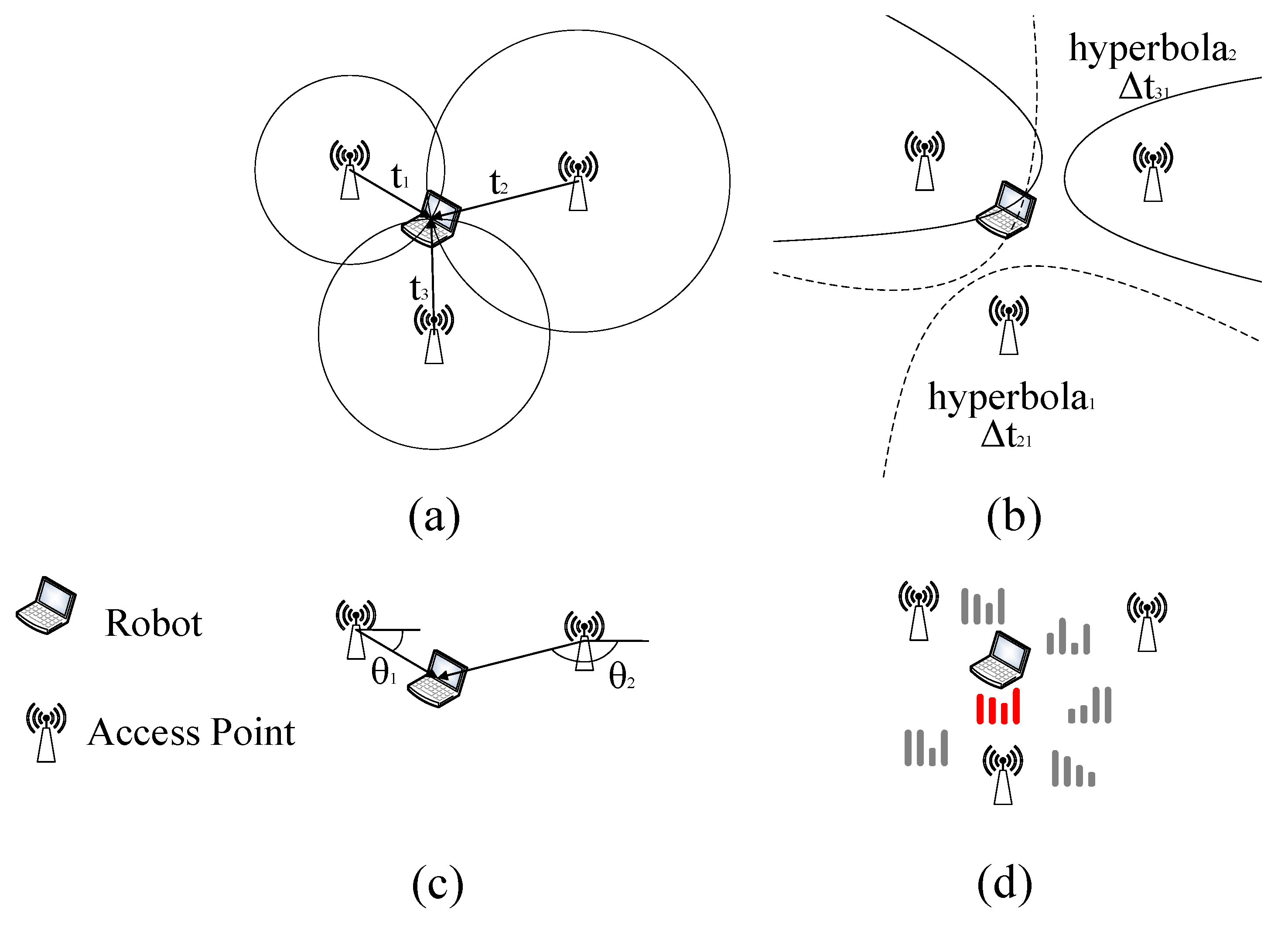
2.2.1. Radio Frequency Technology Positioning Algorithms
2.2.2. Wi-Fi
2.2.3. Bluetooth
2.2.4. ZigBee
2.2.5. Radio Frequency Identification
2.2.6. Ultra-Wide Band
2.3. Comparison of 12 Indoor Positioning Technologies for Mobile Robots
3. Current State of Mobile Robot Indoor Positioning Technologies
3.1. SLAM
3.2. Data Fusion
3.3. Innovative Methods
3.4. Types of Papers
3.5. Paper Citations
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Umetani, T.; Kondo, Y.; Tokuda, T. Rapid development of a mobile robot for the nakanoshima challenge using a robot for intelligent environments. J. Robot. Mechatron. 2020, 32, 1211–1218. [Google Scholar] [CrossRef]
- Karabegović, I.; Karabegović, E.; Mahmić, M.; Husak, E.; Dašić, P. The Implementation of Industry 4.0 Supported by Service Robots in Production Processes. In Proceedings of the 4th International Conference on Design, Simulation, Manufacturing: The Innovation Exchange, Lviv, Ukraine, 8–11 June 2021; pp. 193–202. [Google Scholar]
- Lee, T.J.; Kim, C.H.; Cho, D.I.D. A Monocular Vision Sensor-Based Efficient SLAM Method for Indoor Service Robots. IEEE Trans. Ind. Electron. 2019, 66, 318–328. [Google Scholar] [CrossRef]
- Geok, T.K.; Aung, K.Z.; Aung, M.S.; Soe, M.T.; Abdaziz, A.; Liew, C.P.; Hossain, F.; Tso, C.P.; Yong, W.H. Review of indoor positioning: Radio wave technology. Appl. Sci. 2021, 11, 279. [Google Scholar] [CrossRef]
- Abdulla, A.A.; Liu, H.; Stoll, N.; Thurow, K. A backbone-floyd hybrid path planning method for mobile robot transportation in multi-floor life science laboratories. In Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2016; pp. 406–411. [Google Scholar]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative indoor positioning systems: A systematic review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Zhu, H.; Wang, L.; Liu, Y. A stereo visual-inertial SLAM approach for indoor mobile robots in unknown environments without occlusions. IEEE Access 2019, 7, 185408–185421. [Google Scholar] [CrossRef]
- Tee, Y.K.; Han, Y.C. Lidar-Based 2D SLAM for Mobile Robot in an Indoor Environment: A Review. In Proceedings of the 2021 International Conference on Green Energy, Computing and Sustainable Technology, Miri, Malaysia, 7–9 July 2021; pp. 1–7. [Google Scholar]
- Yang, Z.; Shi, D. Mapping technology in visual SLAM: A review. In Proceedings of the ACM International Conference Proceeding Series, Shenzhen, China, 8–10 December 2018; pp. 291–295. [Google Scholar]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Thewan, T.; Seksan, C.; Pramot, S.; Ismail, A.H.; Terashima, K. Comparing WiFi RSS filtering for wireless robot location system. Procedia Manuf. 2019, 30, 143–150. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Cui, W.; Lu, X.; Zhang, Z.; Sheng, C.; Liu, Q. Mobile Robot Indoor Positioning System Based on K-ELM. J. Sens. 2019, 2019, 7547648. [Google Scholar] [CrossRef]
- Din, M.M.; Jamil, N.; Maniam, J.; Mohamed, M.A. Review of indoor localization techniques. Int. J. Eng. Technol. 2018, 7, 201–204. [Google Scholar] [CrossRef]
- Zekavat, S.R.; Buehrer, R.M.; Durgin, G.D.; Lovisolo, L.; Wang, Z.; Goh, S.T.; Ghasemi, A. An Overview on Position Location: Past, Present, Future. Int. J. Wirel. Inf. Netw. 2021, 28, 45–76. [Google Scholar] [CrossRef]
- Thurow, K.; Zhang, L.; Liu, H.; Junginger, S.; Stoll, N.; Huang, J. Multi-floor laboratory transportation technologies based on intelligent mobile robots. Transp. Saf. Environ. 2019, 1, 37–53. [Google Scholar] [CrossRef]
- Liang, Q.; Liu, M. A Tightly Coupled VLC-Inertial Localization System by EKF. IEEE Robot. Autom. Lett. 2020, 5, 3129–3136. [Google Scholar] [CrossRef]
- Grami, T.; Tlili, A.S. Indoor Mobile Robot Localization based on a Particle Filter Approach. In Proceedings of the 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, STA 2019, Sousse, Tunisia, 24–26 March 2019; pp. 47–52. [Google Scholar]
- Lv, W.; Kang, Y.; Qin, J. Indoor Localization for Skid-Steering Mobile Robot by Fusing Encoder, Gyroscope, and Magnetometer. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1241–1253. [Google Scholar] [CrossRef]
- Zare, M.; Battulwar, R.; Seamons, J.; Sattarvand, J. Applications of Wireless Indoor Positioning Systems and Technologies in Underground Mining: A Review. Min. Metall. Explor. 2021, 38, 2307–2322. [Google Scholar] [CrossRef]
- Zhang, Q.B.; Wang, P.; Chen, Z.H. An improved particle filter for mobile robot localization based on particle swarm optimization. Expert Syst. Appl. 2019, 135, 181–193. [Google Scholar] [CrossRef]
- Maolanon, P.; Sukvichai, K.; Chayopitak, N.; Takahashi, A. Indoor Room Identify and Mapping with Virtual based SLAM using Furnitures and Household Objects Relationship based on CNNs. In Proceedings of the 10th International Conference on Information and Communication Technology for Embedded Systems, Bangkok, Thailand, 25–27 March 2019; pp. 1–6. [Google Scholar]
- Pena Queralta, K.J.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Offloading SLAM for Indoor Mobile Robots with Edge-Fog-Cloud Computing. In Proceedings of the 1st International Conference on Advances in Science, Engineering and Robotics Technology 2019, Dhaka, Bangladesh, 3–5 May 2019; pp. 1–6. [Google Scholar]
- Borodacz, K.; Szczepański, C.; Popowski, S. Review and selection of commercially available IMU for a short time inertial navigation. Aircr. Eng. Aerosp. Technol. 2022, 94, 45–59. [Google Scholar] [CrossRef]
- Gao, M.; Yu, M.; Guo, H.; Xu, Y. Mobile robot indoor positioning based on a combination of visual and inertial sensors. Sensors 2019, 19, 1773. [Google Scholar] [CrossRef]
- Al Khatib, E.I.; Jaradat, M.A.K.; Abdel-Hafez, M.F. Low-Cost Reduced Navigation System for Mobile Robot in Indoor/Outdoor Environments. IEEE Access 2020, 8, 25014–25026. [Google Scholar] [CrossRef]
- Zali, A.; Bozorg, M.; Masouleh, M.T. Localization of an indoor mobile robot using decentralized data fusion. In Proceedings of the ICRoM 2019—7th International Conference on Robotics and Mechatronics, Tehran, Iran, 20–21 November 2019; pp. 328–333. [Google Scholar]
- Xu, Y.; Liu, T.; Sun, B.; Zhang, Y.; Khatibi, S.; Sun, M. Indoor Vision/INS Integrated Mobile Robot Navigation Using Multimodel-Based Multifrequency Kalman Filter. Math. Probl. Eng. 2021, 2021, 6694084. [Google Scholar] [CrossRef]
- Liu, R.; Shen, J.; Chen, C.; Yang, J. SLAM for Robotic Navigation by Fusing RGB-D and Inertial Data in Recurrent and Convolutional Neural Networks. In Proceedings of the 2019 IEEE 5th International Conference on Mechatronics System and Robots, Singapore, 3–5 May 2019; pp. 1–6. [Google Scholar]
- Yan, X.; Guo, H.; Yu, M.; Xu, Y.; Cheng, L.; Jiang, P. Light detection and ranging/inertial measurement unit-integrated navigation positioning for indoor mobile robots. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420919940. [Google Scholar] [CrossRef]
- Baharom, A.K.; Abdul-Rahman, S.; Jamali, R.; Mutalib, S. Towards modelling autonomous mobile robot localization by using sensor fusion algorithms. In Proceedings of the 2020 IEEE 10th International Conference on System Engineering and Technology, Shah Alam, Malaysia, 9 November 2020; pp. 185–190. [Google Scholar]
- Liu, J.; Pu, J.; Sun, L.; He, Z. An approach to robust INS/UWB integrated positioning for autonomous indoor mobile robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Liu, X.; Zhao, B.; Yang, B. An extensible positioning system for locating mobile robots in unfamiliar environments. Sensors 2019, 19, 4025. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wang, Y. Research on the UWB/IMU fusion positioning of mobile vehicle based on motion constraints. Acta Geod. Geophys. 2020, 55, 237–255. [Google Scholar] [CrossRef]
- Yousuf, S.; Kadri, M.B. Information Fusion of GPS, INS and Odometer Sensors for Improving Localization Accuracy of Mobile Robots in Indoor and Outdoor Applications. Robotica 2021, 39, 250–276. [Google Scholar] [CrossRef]
- Yousuf, S.; Kadri, M.B. Robot localization in indoor and outdoor environments by multi-sensor fusion. In Proceedings of the 2018 14th International Conference on Emerging Technologies, Islamabad, Pakistan, 21–22 November 2018; pp. 1–6. [Google Scholar]
- Wang, Y.X.; Chang, C.L. ROS-base Multi-Sensor Fusion for Accuracy Positioning and SLAM System. In Proceedings of the 2020 International Symposium on Community-Centric Systems, Islamabad, Pakistan, 21–22 November 2018; pp. 1–6. [Google Scholar]
- Cui, Z.; Wang, Y.; Fu, X. Research on Indoor Positioning System Based on VLC. In Proceedings of the 2020 Prognostics and Health Management Conference, PHM-Besancon 2020, Besancon, France, 4–7 May 2020; pp. 360–365. [Google Scholar]
- Guan, W.; Chen, S.; Wen, S.; Tan, Z.; Song, H.; Hou, W. High-Accuracy Robot Indoor Localization Scheme Based on Robot Operating System Using Visible Light Positioning. IEEE Photonics J. 2020, 12, 7901716. [Google Scholar] [CrossRef]
- Louro, P.; Vieira, M.; Vieira, M.A. Bidirectional visible light communication. Opt. Eng. 2020, 59, 127109. [Google Scholar] [CrossRef]
- Zhuang, Y.; Wang, Q.; Shi, M.; Cao, P.; Qi, L.; Yang, J. Low-Power Centimeter-Level Localization for Indoor Mobile Robots Based on Ensemble Kalman Smoother Using Received Signal Strength. IEEE Internet Things J. 2019, 6, 6513–6522. [Google Scholar] [CrossRef]
- Amsters, R.; Holm, D.; Joly, J.; Demeester, E.; Stevens, N.; Slaets, P. Visible light positioning using bayesian filters. J. Light. Technol. 2020, 38, 5925–5936. [Google Scholar] [CrossRef]
- Amsters, R.; Demeester, E.; Slaets, P.; Holm, D.; Joly, J.; Stevens, N. Towards automated calibration of visible light positioning systems. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation, Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Amsters, R.; Demeester, E.; Stevens, N.; Slaets, P. Calibration of visible light positioning systems with a mobile robot. Sensors 2021, 21, 2394. [Google Scholar] [CrossRef]
- Li, X.; Yan, Z.; Huang, L.; Chen, S.; Liu, M. High-Accuracy and Real-Time Indoor Positioning System Based on Visible Light Communication and Mobile Robot. Int. J. Opt. 2020, 2020, 3124970. [Google Scholar] [CrossRef]
- Louro, P.; Vieira, M.; Vieira, M.A. Optical link for bidirectional communication based on visible light. In Proceedings of the International Society for Optical Engineering, Europe Online, 6–10 April 2020; Volume 11354, pp. 1135400–1135402. [Google Scholar]
- Wang, C.; Xing, L.; Tu, X. A novel position and orientation sensor for indoor navigation based on linear CCDs. Sensors 2020, 20, 748. [Google Scholar] [CrossRef] [PubMed]
- Jeong, J.H.; Park, K. Numerical analysis of 2-d positioned, indoor, fuzzy-logic, autonomous navigation system based on chromaticity and frequency-component analysis of led light. Sensors 2021, 21, 4345. [Google Scholar] [CrossRef] [PubMed]
- Bernardes, E.; Viollet, S.; Raharijaona, T. A Three-Photo-Detector Optical Sensor Accurately Localizes a Mobile Robot Indoors by Using Two Infrared Light-Emitting Diodes. IEEE Access 2020, 8, 87490–87503. [Google Scholar] [CrossRef]
- Tsay, L.W.J.; Shiigi, T.; Zhao, X.; Huang, Z.; Shiraga, K.; Suzuki, T.; Ogawa, Y.; Kondo, N. Static and dynamic evaluations of acoustic positioning system using TDMA and FDMA for robots operating in a greenhouse. Int. J. Agric. Biol. Eng. 2022, 15, 28–33. [Google Scholar]
- Chen, W.; Xu, J.; Zhao, X.; Liu, Y.; Yang, J. Separated Sonar Localization System for Indoor Robot Navigation. IEEE Trans. Ind. Electron. 2021, 68, 6042–6052. [Google Scholar] [CrossRef]
- Zhang, Y.; Hsiung-Cheng, L.; Zhao, J.; Zewen, M.; Ye, Z.; Sun, H. A multi-DoF ultrasonic receiving device for indoor positioning of AGV system. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control, Taichung, Taiwan, 6–8 December 2018; pp. 97–100. [Google Scholar]
- Gualda, D.; Ureña, J.; García, J.C.; García, E.; Alcalá, J. Simultaneous calibration and navigation (SCAN) of multiple ultrasonic local positioning systems. Inf. Fusion 2019, 45, 53–65. [Google Scholar] [CrossRef]
- Magrin, C.E.; Todt, E. Multi-sensor fusion method based on artificial neural network for mobile robot self-localization. In Proceedings of the 2019 Latin American Robotics Symposium, 2019 Brazilian Symposium on Robotics and 2019 Workshop on Robotics in Education, Rio Grande, Brazil, 23–25 October 2019; pp. 138–143. [Google Scholar]
- Pérez-Navarro, A.; Torres-Sospedra, J.; Montoliu, R.; Conesa, J.; Berkvens, R.; Caso, G.; Costa, C.; Dorigatti, N.; Hernández, N.; Knauth, S.; et al. Challenges of fingerprinting in indoor positioning and navigation. In Geographical and Fingerprinting Data for Positioning and Navigation Systems: Challenges, Experiences and Technology Roadmap; Academic Press: Cambridge, MA, USA, 2018; pp. 1–20. [Google Scholar]
- Nagai, I.; Sakai, J.; Watanabe, K. Indoor self-localization using multiple magnetic sensors. J. Robot. Mechatron. 2019, 31, 203–211. [Google Scholar] [CrossRef]
- Habich, T.L.; Stuede, M.; Labbe, M.; Spindeldreier, S. Have I been here before? Learning to close the loop with lidar data in graph-based SLAM. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Delft, The Netherlands, 12–16 July 2021; pp. 504–510. [Google Scholar]
- Sun, Z.; Wu, B.; Xu, C.Z.; Sarma, S.E.; Yang, J.; Kong, H. Frontier Detection and Reachability Analysis for Efficient 2D Graph-SLAM Based Active Exploration. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 2051–2058. [Google Scholar]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Li, Y.; Shi, C. Localization and Navigation for Indoor Mobile Robot Based on ROS. In Proceedings of the 2018 Chinese Automation Congress, Xi’an, China, 30 November–2 December 2018; pp. 1135–1139. [Google Scholar]
- Talwar, D.; Jung, S. Particle Filter-based Localization of a Mobile Robot by Using a Single Lidar Sensor under SLAM in ROS Environment. In Proceedings of the International Conference on Control, Automation and Systems, Jeju, Republic of Korea, 15–18 October 2019; pp. 1112–1115. [Google Scholar]
- Nie, F.; Zhang, W.; Yao, Z.; Shi, Y.; Li, F.; Huang, Q. LCPF: A Particle Filter Lidar SLAM System with Loop Detection and Correction. IEEE Access 2020, 8, 20401–20412. [Google Scholar] [CrossRef]
- Chen, D.; Weng, J.; Huang, F.; Zhou, J.; Mao, Y.; Liu, X. Heuristic Monte Carlo Algorithm for Unmanned Ground Vehicles Realtime Localization and Mapping. IEEE Trans. Veh. Technol. 2020, 69, 10642–10655. [Google Scholar] [CrossRef]
- Garrote, L.; Torres, M.; Barros, T.; Perdiz, J.; Premebida, C.; Nunes, U.J. Mobile Robot Localization with Reinforcement Learning Map Update Decision aided by an Absolute Indoor Positioning System. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 1620–1626. [Google Scholar]
- Yilmaz, A.; Temeltas, H. ROS Architecture for Indoor Localization of Smart-AGVs Based on SA-MCL Algorithm. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 28–30 November 2019; pp. 885–889. [Google Scholar]
- Yan, Y.P.; Wong, S.F. A navigation algorithm of the mobile robot in the indoor and dynamic environment based on the PF-SLAM algorithm. Clust. Comput. 2019, 22, 14207–14218. [Google Scholar] [CrossRef]
- Liu, Z.; Cui, Z.; Li, Y.; Wang, W. Parameter optimization analysis of gmapping algorithm based on improved RBPF particle filter. In Proceedings of the Journal of Physics: Conference Series, Guiyang, China, 14–15 August 2020; Volume 1646, p. 012004. [Google Scholar]
- Wu, C.Y.; Lin, H.Y. Autonomous mobile robot exploration in unknown indoor environments based on rapidly-exploring random tree. In Proceedings of the IEEE International Conference on Industrial Technology, Melbourne, Australia, 13–15 February 2019; pp. 1345–1350. [Google Scholar]
- Camargo, A.B.; Liu, Y.; He, G.; Zhuang, Y. Mobile Robot Autonomous Exploration and Navigation in Large-scale Indoor Environments. In Proceedings of the 10th International Conference on Intelligent Control and Information Processing, ICICIP 2019, Marrakesh, Morocco, 14–19 December 2019; pp. 106–111. [Google Scholar]
- Norzam, W.A.S.; Hawari, H.F.; Kamarudin, K. Analysis of Mobile Robot Indoor Mapping using GMapping Based SLAM with Different Parameter. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Pulau Pinang, Malaysia, 26–27 August 2019; Volume 705, p. 012037. [Google Scholar]
- Shaw, J.-S.; Liew, C.J.; Xu, S.-X.; Zhang, Z.-M. Development of an AI-enabled AGV with robot manipulator. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 284–287. [Google Scholar]
- Nagla, S. 2D Hector SLAM of Indoor Mobile Robot using 2D Lidar. In Proceedings of the IEEE 2nd International Conference on Power, Energy, Control and Transmission Systems, Proceedings, Chennai, India, 10–11 December 2020; pp. 1–4. [Google Scholar]
- Garrote, L.; Barros, T.; Pereira, R.; Nunes, U.J. Absolute Indoor Positioning-aided Laser-based Particle Filter Localization with a Refinement Stage. In Proceedings of the IECON (Industrial Electronics Conference), Lisbon, Portugal, 14–17 October 2019; pp. 597–603. [Google Scholar]
- Teskeredzic, E.; Akagic, A. Low cost UGV platform for autonomous 2D navigation and map-building based on a single sensory input. In Proceedings of the 7th International Conference on Control, Decision and Information Technologies, Prague, Czech Republic, 29 June–2 July 2020; pp. 988–993. [Google Scholar]
- Wilbers, D.; Merfels, C.; Stachniss, C. A comparison of particle filter and graph-based optimization for localization with landmarks in automated vehicles. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 220–225. [Google Scholar]
- Papadimitriou, A.; Kleitsiotis, I.; Kostavelis, I.; Mariolis, I.; Giakoumis, D.; Likothanassis, S.; Tzovaras, D. Loop Closure Detection and SLAM in Vineyards with Deep Semantic Cues. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 2251–2258. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Deng, Y.; Shan, Y.; Gong, Z.; Chen, L. Large-Scale Navigation Method for Autonomous Mobile Robot Based on Fusion of GPS and Lidar SLAM. In Proceedings of the 2018 Chinese Automation Congress, CAC 2018, Xi’an, China, 30 November–2 December 2018; pp. 3145–3148. [Google Scholar]
- Gao, H.; Zhang, X.; Wen, J.; Yuan, J.; Fang, Y. Autonomous Indoor Exploration Via Polygon Map Construction and Graph-Based SLAM Using Directional Endpoint Features. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1531–1542. [Google Scholar] [CrossRef]
- Chan, S.H.; Wu, P.T.; Fu, L.C. Robust 2D Indoor Localization Through Laser SLAM and Visual SLAM Fusion. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2018, Miyazaki, Japan, 7–10 October 2018; pp. 1263–1268. [Google Scholar]
- Xu, Y.; Ou, Y.; Xu, T. SLAM of Robot based on the Fusion of Vision and LIDAR. In Proceedings of the 2018 IEEE International Conference on Cyborg and Bionic Systems, Shenzhen, China, 25–27 October 2018; pp. 121–126. [Google Scholar]
- Xu, S.; Chou, W.; Dong, H. A robust indoor localization system integrating visual localization aided by CNN-based image retrieval with Monte Carlo localization. Sensors 2019, 19, 249. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, J.; Li, C.; Ho, D.; Cheng, J.; Yan, T.; Meng, L.; Meng, M.Q.H. Safe and robust mobile robot navigation in uneven indoor environments. Sensors 2019, 19, 2993. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Huang, H.; Qin, Y.; Li, Y.; Liu, Y. Vision and laser fused SLAM in indoor environments with multi-robot system. Assem. Autom. 2019, 39, 297–307. [Google Scholar] [CrossRef]
- Liang, J.; Song, W.; Shen, L.; Zhang, Y. Indoor semantic map building for robot navigation. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference, Chongqing, China, 24–26 May 2019; pp. 794–798. [Google Scholar]
- Li, H.; Mao, Y.; You, W.; Ye, B.; Zhou, X. A neural network approach to indoor mobile robot localization. In Proceedings of the 2020 19th Distributed Computing and Applications for Business Engineering and Science, Xuzhou, China, 16–19 October 2020; pp. 66–69. [Google Scholar]
- Zou, H.; Chen, C.L.; Li, M.; Yang, J.; Zhou, Y.; Xie, L.; Spanos, C.J. Adversarial Learning-Enabled Automatic WiFi Indoor Radio Map Construction and Adaptation with Mobile Robot. IEEE Internet Things J. 2020, 7, 6946–6954. [Google Scholar] [CrossRef]
- Lee, G.; Moon, B.C.; Lee, S.; Han, D. Fusion of the slam with wi-fi-based positioning methods for mobile robot-based learning data collection, localization, and tracking in indoor spaces. Sensors 2020, 20, 5182. [Google Scholar] [CrossRef]
- Li, I.-h.; Wang, W.-Y.; Li, C.-Y.; Kao, J.-Z.; Hsu, C.-C. Cloud-based improved Monte Carlo localization algorithm with robust orientation estimation for mobile robots. Eng. Comput. 2018, 36, 178–203. [Google Scholar] [CrossRef]
- Rezende, A.M.C.; Junior, G.P.C.; Fernandes, R.; Miranda, V.R.F.; Azpurua, H.; Pessin, G.; Freitas, G.M. Indoor Localization and Navigation Control Strategies for a Mobile Robot Designed to Inspect Confined Environments. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Hong Kong, China, 20–21 August 2020; pp. 1427–1433. [Google Scholar]
- Shen, D.; Xu, Y.; Huang, Y. Research on 2D-SLAM of indoor mobile robot based on laser radar. In Proceedings of the ACM International Conference Proceeding Series, Shenzhen, China, 19–21 July 2019; pp. 1–7. [Google Scholar]
- Muñoz-Salinas, R.; Marín-Jimenez, M.J.; Medina-Carnicer, R. SPM-SLAM: Simultaneous localization and mapping with squared planar markers. Pattern Recognit. 2019, 86, 156–171. [Google Scholar] [CrossRef]
- Tanaka, H. Ultra-High-Accuracy Visual Marker for Indoor Precise Positioning. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 31 May 2020–31 August 2020; pp. 2338–2343. [Google Scholar]
- Song, K.T.; Chang, Y.C. Design and Implementation of a Pose Estimation System Based on Visual Fiducial Features and Multiple Cameras. In Proceedings of the 2018 International Automatic Control Conference, Taoyuan, Taiwan, 4–7 November 2018; pp. 1–6. [Google Scholar]
- Mantha, B.R.K.; Garcia de Soto, B. Designing a reliable fiducial marker network for autonomous indoor robot navigation. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction, Banff, AB, Canada, 21–24 May 2019; pp. 74–81. [Google Scholar]
- Nitta, Y.; Bogale, D.Y.; Kuba, Y.; Tian, Z. Evaluating slam 2d and 3d mappings of indoor structures. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction, ISARC 2020: From Demonstration to Practical Use—To New Stage of Construction Robot, Kitakyshu, Japan, 27–28 October 2020; pp. 821–828. [Google Scholar]
- Magnago, V.; Palopoli, L.; Passerone, R.; Fontanelli, D.; Macii, D. Effective Landmark Placement for Robot Indoor Localization with Position Uncertainty Constraints. IEEE Trans. Instrum. Meas. 2019, 68, 4443–4455. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Zhang, X.; Zhu, L.; Zhang, H.; Guan, Y. Multi-sensor fusion localization of indoor mobile robot. In Proceedings of the 2019 IEEE International Conference on Real-Time Computing and Robotics, Irkutsk, Russia, 4–9 August 2019; pp. 481–486. [Google Scholar]
- Avgeris, M.; Spatharakis, D.; Athanasopoulos, N.; Dechouniotis, D.; Papavassiliou, S. Single vision-based self-localization for autonomous robotic agents. In Proceedings of the 2019 International Conference on Future Internet of Things and Cloud Workshops, Istanbul, Turkey, 26–28 August 2019; pp. 123–129. [Google Scholar]
- Lv, W.; Kang, Y.; Qin, J. FVO: Floor vision aided odometry. Sci. China Inf. Sci. 2019, 62, 12202. [Google Scholar] [CrossRef]
- Duan, C.; Junginger, S.; Huang, J.; Jin, K.; Thurow, K. Deep Learning for Visual SLAM in Transportation Robotics: A review. Transp. Saf. Environ. 2019, 1, 177–184. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, C.; Ang, M.H. Real-Time Visual-Inertial Localization Using Semantic Segmentation towards Dynamic Environments. IEEE Access 2020, 8, 155047–155059. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, S.; Cheng, H. Real-time cloud visual simultaneous localization and mapping for indoor service robots. IEEE Access 2020, 8, 16816–16829. [Google Scholar] [CrossRef]
- Sun, M.; Yang, S.; Liu, H. Convolutional neural network-based coarse initial position estimation of a monocular camera in large-scale 3D light detection and ranging maps. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419893518. [Google Scholar] [CrossRef]
- Ran, T.; Yuan, L.; Zhang, J.B. Scene perception based visual navigation of mobile robot in indoor environment. ISA Trans. 2021, 109, 389–400. [Google Scholar] [CrossRef]
- Da Silva, S.P.P.; Almeida, J.S.; Ohata, E.F.; Rodrigues, J.J.P.C.; De Albuquerque, V.H.C.; Reboucas Filho, P.P. Monocular Vision Aided Depth Map from RGB Images to Estimate of Localization and Support to Navigation of Mobile Robots. IEEE Sens. J. 2020, 20, 12040–12048. [Google Scholar] [CrossRef]
- Syahputra, K.A.; Sena Bayu, D.B.; Pramadihanto, D. 3D Indoor Mapping Based on Camera Visual Odometry Using Point Cloud. In Proceedings of the International Electronics Symposium: The Role of Techno-Intelligence in Creating an Open Energy System Towards Energy Democracy, Proceedings, Surabaya, Indonesia, 27–28 September 2019; pp. 94–99. [Google Scholar]
- Kanayama, H.; Ueda, T.; Ito, H.; Yamamoto, K. Two-mode Mapless Visual Navigation of Indoor Autonomous Mobile Robot using Deep Convolutional Neural Network. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration, Honolulu, HI, USA, 12–15 January 2020; pp. 536–541. [Google Scholar]
- Fu, Q.; Yu, H.; Lai, L.; Wang, J.; Peng, X.; Sun, W.; Sun, M. A robust RGB-D SLAM system with points and lines for low texture indoor environments. IEEE Sens. J. 2019, 19, 9908–9920. [Google Scholar] [CrossRef]
- Han, S.; Xi, Z. Dynamic Scene Semantics SLAM Based on Semantic Segmentation. IEEE Access 2020, 8, 43563–43570. [Google Scholar] [CrossRef]
- Sun, Q.; Yuan, J.; Zhang, X.; Duan, F. Plane-Edge-SLAM: Seamless Fusion of Planes and Edges for SLAM in Indoor Environments. IEEE Trans. Autom. Sci. Eng. 2021, 18, 2061–2075. [Google Scholar] [CrossRef]
- Liao, Z.; Wang, W.; Qi, X.; Zhang, X. RGB-D object slam using quadrics for indoor environments. Sensors 2020, 20, 5150. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Fan, G.; Bai, L.; Li, R.; Li, D. MGC-VSLAM: A meshing-based and geometric constraint VSLAM for dynamic indoor environments. IEEE Access 2020, 8, 81007–81021. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, C.; Song, Y.; Pang, B.; Zhang, G. Three-Dimensional Reconstruction Based on Visual SLAM of Mobile Robot in Search and Rescue Disaster Scenarios. Robotica 2020, 38, 350–373. [Google Scholar] [CrossRef]
- Yang, S.; Fan, G.; Bai, L.; Zhao, C.; Li, D. SGC-VSLAM: A semantic and geometric constraints VSLAM for dynamic indoor environments. Sensors 2020, 20, 2432. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Li, Q.; Wang, T.; Ma, T. A robust visual odometry based on RGB-D camera in dynamic indoor environments. Meas. Sci. Technol. 2021, 32, 044033. [Google Scholar] [CrossRef]
- Maffei, R.; Pittol, D.; Mantelli, M.; Prestes, E.; Kolberg, M. Global localization over 2D floor plans with free-space density based on depth information. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 4609–4614. [Google Scholar]
- Tian, Z.; Guo, C.; Liu, Y.; Chen, J. An Improved RRT Robot Autonomous Exploration and SLAM Construction Method. In Proceedings of the 5th International Conference on Automation, Control and Robotics Engineering, Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 612–619. [Google Scholar]
- Hu, B.; Huang, H. Visual odometry implementation and accuracy evaluation based on real-time appearance-based mapping. Sens. Mater. 2020, 32, 2261–2275. [Google Scholar] [CrossRef]
- Martín, F.; Matellán, V.; Rodríguez, F.J.; Ginés, J. Octree-based localization using RGB-D data for indoor robots. Eng. Appl. Artif. Intell. 2019, 77, 177–185. [Google Scholar] [CrossRef]
- Yang, L.; Dryanovski, I.; Valenti, R.G.; Wolberg, G.; Xiao, J. RGB-D camera calibration and trajectory estimation for indoor mapping. Auton. Robot. 2020, 44, 1485–1503. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, D.; Peng, J.; Wang, X.; Wang, L.; Chen, L.; Li, J.; Zhang, X. Real-Time Robust Stereo Visual SLAM System Based on Bionic Eyes. IEEE Trans. Med. Robot. Bionics 2020, 2, 391–398. [Google Scholar] [CrossRef]
- Cebollada, S.; Paya, L.; Roman, V.; Reinoso, O. Hierarchical Localization in Topological Models Under Varying Illumination Using Holistic Visual Descriptors. IEEE Access 2019, 7, 49580–49595. [Google Scholar] [CrossRef]
- Zhao, X.; Zuo, T.; Hu, X. OFM-SLAM: A Visual Semantic SLAM for Dynamic Indoor Environments. Math. Probl. Eng. 2021, 2021, 5538840. [Google Scholar] [CrossRef]
- Lee, C.; Peng, J.; Xiong, Z. Asynchronous fusion of visual and wheel odometer for SLAM applications. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Boston, MA, USA, 6–9 July 2020; pp. 1990–1995. [Google Scholar]
- Xu, M.; Ma, L. Object Semantic Annotation Based on Visual SLAM. In Proceedings of the 2021 Asia-Pacific Conference on Communications Technology and Computer Science, Shenyang, China, 22–24 January 2021; pp. 197–201. [Google Scholar]
- Rusli, I.; Trilaksono, B.R.; Adiprawita, W. RoomSLAM: Simultaneous localization and mapping with objects and indoor layout structure. IEEE Access 2020, 8, 196992–197004. [Google Scholar] [CrossRef]
- Corotan, A.; Irgen-Gioro, J.J.Z. An Indoor Navigation Robot Using Augmented Reality. In Proceedings of the 2019 5th International Conference on Control, Automation and Robotics, Beijing, China, 19–22 April 2019; pp. 111–116. [Google Scholar]
- Luo, R.C.; Hsiao, T.J. Dynamic wireless indoor localization incorporating with an autonomous mobile robot based on an adaptive signal model fingerprinting approach. IEEE Trans. Ind. Electron. 2019, 66, 1940–1951. [Google Scholar] [CrossRef]
- Rusli, M.E.; Ali, M.; Jamil, N.; Din, M.M. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT). In Proceedings of the 6th International Conference on Computer and Communication Engineering: Innovative Technologies to Serve Humanity, Kuala Lumpur, Malaysia, 26–27 July 2016; pp. 12–77. [Google Scholar]
- Villacrés, J.L.C.; Zhao, Z.; Braun, T.; Li, Z. A Particle Filter-Based Reinforcement Learning Approach for Reliable Wireless Indoor Positioning. IEEE J. Sel. Areas Commun. 2019, 37, 2457–2473. [Google Scholar] [CrossRef]
- Zafari, F.; Papapanagiotou, I.; Devetsikiotis, M.; Hacker, T. An ibeacon based proximity and indoor localization system. arXiv 2017, arXiv:1703.07876. [Google Scholar]
- Khoi Huynh, M.; Anh Nguyen, D. A Research on Automated Guided Vehicle Indoor Localization System Via CSI. In Proceedings of the 2019 International Conference on System Science and Engineering, Dong Hoi, Vietnam, 20–21 July 2019; pp. 581–585. [Google Scholar]
- Bottigliero, S.; Milanesio, D.; Saccani, M.; Maggiora, R. A low-cost indoor real-time locating system based on TDOA estimation of UWB pulse sequences. IEEE Trans. Instrum. Meas. 2021, 70, 5502211. [Google Scholar] [CrossRef]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef]
- Sonnessa, A.; Saponaro, M.; Alfio, V.S.; Capolupo, A.; Turso, A.; Tarantino, E. Indoor Positioning Methods—A Short Review and First Tests Using a Robotic Platform for Tunnel Monitoring. In Proceedings of the International Conference on Computational Science and Its Applications, Cagliari, Italy, 1–4 July 2020; pp. 664–679. [Google Scholar]
- Cui, W.; Liu, Q.; Zhang, L.; Wang, H.; Lu, X.; Li, J. A robust mobile robot indoor positioning system based on Wi-Fi. Int. J. Adv. Robot. Syst. 2020, 17, 1729881419896660. [Google Scholar] [CrossRef]
- Sun, J.; Fu, Y.; Li, S.; Su, Y. Automated guided vehicle indoor positioning method based cellular automata. In Proceedings of the 2018 Chinese Intelligent Systems Conference. WenZhou, ZheJiang, China, 13–14 October 2018; pp. 615–630. [Google Scholar]
- Zhang, L.; Chen, Z.; Cui, W.; Li, B.; Chen, C.; Cao, Z.; Gao, K. WiFi-Based Indoor Robot Positioning Using Deep Fuzzy Forests. IEEE Internet Things J. 2020, 7, 10773–10781. [Google Scholar] [CrossRef]
- Yu, N.; Zhan, X.; Zhao, S.; Wu, Y.; Feng, R. A Precise Dead Reckoning Algorithm Based on Bluetooth and Multiple Sensors. IEEE Internet Things J. 2018, 5, 336–351. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Sreeja, M.; Sreeram, M. Bluetooth 5 beacons: A novel design for Indoor positioning. In Proceedings of the ACM International Conference Proceeding Series, Tacoma, DC, USA, 18–20 August 2017. [Google Scholar]
- Alexandr, A.; Anton, D.; Mikhail, M.; Ilya, K. Comparative analysis of indoor positioning methods based on the wireless sensor network of bluetooth low energy beacons. In Proceedings of the 2020 International Conference Engineering and Telecommunication, Dolgoprudny, Russia, 25–26 November 2020; pp. 1–5. [Google Scholar]
- Parhi, D. Advancement in navigational path planning of robots using various artificial and computing techniques. Int. Robot. Autom. J. 2018, 4, 133–136. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, M.; Zhang, Y. Mobile localization in complex indoor environment based on ZigBee wireless network. J. Phys. 2019, 1314, 012214. [Google Scholar] [CrossRef]
- Wang, J.; Takahashi, Y. Particle Smoother-Based Landmark Mapping for the SLAM Method of an Indoor Mobile Robot with a Non-Gaussian Detection Model. J. Sens. 2019, 2019, 3717298. [Google Scholar] [CrossRef]
- Patre, S.R. Passive Chipless RFID Sensors: Concept to Applications A Review. IEEE J. Radio Freq. Identif. 2022, 6, 64–76. [Google Scholar] [CrossRef]
- Ibrahim, A.A.A.; Nisar, K.; Hzou, Y.K.; Welch, I. Review and Analyzing RFID Technology Tags and Applications. In Proceedings of the 13th IEEE International Conference on Application of Information and Communication Technologies, AICT 2019, Baku, Azerbaijan, 23–25 October 2019; pp. 1–4. [Google Scholar]
- Martinelli, F. Simultaneous Localization and Mapping Using the Phase of Passive UHF-RFID Signals. J. Intell. Robot. Syst. Theory Appl. 2019, 94, 711–725. [Google Scholar] [CrossRef]
- Magnago, V.; Palopoli, L.; Fontanelli, D.; Macii, D.; Motroni, A.; Nepa, P.; Buffi, A.; Tellini, B. Robot localisation based on phase measures of backscattered UHF-RFID signals. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference, Proceedings, Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Bernardini, F.; Motroni, A.; Nepa, P.; Buffi, A.; Tripicchio, P.; Unetti, M. Particle swarm optimization in multi-antenna SAR-based localization for UHF-RFID tags. In Proceedings of the 2019 IEEE International Conference on RFID Technology and Applications, Pisa, Italy, 25–27 September 2019; pp. 291–296. [Google Scholar]
- Gareis, M.; Hehn, M.; Stief, P.; Korner, G.; Birkenhauer, C.; Trabert, J.; Mehner, T.; Vossiek, M.; Carlowitz, C. Novel UHF-RFID Listener Hardware Architecture and System Concept for a Mobile Robot Based MIMO SAR RFID Localization. IEEE Access 2021, 9, 497–510. [Google Scholar] [CrossRef]
- Tzitzis, A.; Megalou, S.; Siachalou, S.; Emmanouil, T.G.; Filotheou, A.; Yioultsis, T.V.; Dimitriou, A.G. Trajectory Planning of a Moving Robot Empowers 3D Localization of RFID Tags with a Single Antenna. IEEE J. Radio Freq. Identif. 2020, 4, 283–299. [Google Scholar] [CrossRef]
- Yadav, R.; Malviya, L. UWB antenna and MIMO antennas with bandwidth, band-notched, and isolation properties for high-speed data rate wireless communication: A review. Int. J. RF Microw. Comput. Aided Eng. 2020, 30, e22033. [Google Scholar] [CrossRef]
- Cano, J.; Chidami, S.; Ny, J.L. A Kalman filter-based algorithm for simultaneous time synchronization and localization in UWB networks. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 1431–1437. [Google Scholar]
- Sbirna, S.; Sbirna, L.S. Optimization of indoor localization of automated guided vehicles using ultra-wideband wireless positioning sensors. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing, Sinaia, Romania, 9–11 October 2019; pp. 504–509. [Google Scholar]
- Xin, J.; Gao, K.; Shan, M.; Yan, B.; Liu, D. A Bayesian Filtering Approach for Error Mitigation in Ultra-Wideband Ranging. Sensors 2019, 19, 440. [Google Scholar] [CrossRef]
- Shi, D.; Mi, H.; Collins, E.G., Jr.; Wu, J. An Indoor Low-Cost and High-Accuracy Localization Approach for AGVs. IEEE Access 2020, 8, 50085–50090. [Google Scholar] [CrossRef]
- Zhu, X.; Yi, J.; Cheng, J.; He, L. Adapted Error Map Based Mobile Robot UWB Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 6336–6350. [Google Scholar] [CrossRef]
- Lim, H.; Park, C.; Myung, H. RONet: Real-time Range-only Indoor Localization via Stacked Bidirectional LSTM with Residual Attention. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 3241–3247. [Google Scholar]
- Sutera, E.; Mazzia, V.; Salvetti, F.; Fantin, G.; Chiaberge, M. Indoor point-to-point navigation with deep reinforcement learning and ultra-wideband. In Proceedings of the 13th International Conference on Agents and Artificial Intelligence, Online Streaming, 4–6 February 2021; pp. 38–47. [Google Scholar]
- Liu, Y.; Sun, R.; Liu, J.; Fan, Y.; Li, L.; Zhang, Q. Research on the positioning method of autonomous mobile robot in structure space based on UWB. In Proceedings of the 2019 International Conference on High Performance Big Data and Intelligent Systems, Shenzhen, China, 9–11 May 2019; pp. 278–282. [Google Scholar]
- Murthy, S.D.; Srivenkata Krishnan, S.; Sundarrajan, G.; Kiran Kassyap, S.; Bhagwanth, R.; Balasubramanian, V. A robust approach for improving the accuracy of IMU based indoor mobile robot localization. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics, Doctoral Consortium, Lisbon, Portugal, 29–31 July 2016; pp. 436–445. [Google Scholar]
- Boniardi, F.; Caselitz, T.; Kümmerle, R.; Burgard, W. A pose graph-based localization system for long-term navigation in CAD floor plans. Robot. Auton. Syst. 2019, 112, 84–97. [Google Scholar] [CrossRef]
- Zhou, A.; Yang, S.; Yang, Y.; Fan, Y.; Ma, H. Autonomous Environment Mapping Using Commodity Millimeter-wave Network Device. In Proceedings of the IEEE INFOCOM, Paris, France, 29 April–2 May 2019; pp. 1126–1134. [Google Scholar]
- Cui, X.; Lu, C.; Wang, J. 3D Semantic Map Construction Using Improved ORB-SLAM2 for Mobile Robot in Edge Computing Environment. IEEE Access 2020, 8, 67179–67191. [Google Scholar] [CrossRef]
- Lu, Y.; Koivisto, M.; Talvitie, J.; Valkama, M.; Lohan, E.S. EKF-based and geometry-based positioning under location uncertainty of access nodes in indoor environment. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation, Pisa, Italy, 30 September–3 October 2019. [Google Scholar]
- Serif, T.; Perente, O.K.; Dalan, Y. RoboMapper: An automated signal mapping robot for RSSI fingerprinting. In Proceedings of the 2019 International Conference on Future Internet of Things and Cloud, Istanbul, Turkey, 26–28 August 2019; pp. 364–370. [Google Scholar]
- Shipitko, O.S.; Abramov, M.P.; Lukoyanov, A.S.; Panfilova, E.I.; Kunina, I.A.; Grigoryev, A.S. Edge detection based mobile robot indoor localization. In Proceedings of the International Society for Optical Engineering, Munich, Germany, 1–3 November 2018; pp. 784–792. [Google Scholar]
- Cheng, C.H.; Wu, M.F.; Guo, S.H.; Chen, K.S. Realization and performance assessment of a force-sensing based smart floor panel for indoor localization applications. Sens. Actuators A Phys. 2019, 285, 468–481. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, G.; Wang, Z.; Wang, Z.; Sun, L. Dense 3D Mapping for Indoor Environment Based on Feature-point SLAM Method. In Proceedings of the ACM International Conference Proceeding Series, Xiamen, China, 8–11 May 2020; pp. 42–46. [Google Scholar]
- Koledoye, M.A.; Facchinetti, T.; Almeida, L. Improved MDS-based Localization with Non-line-of-sight RF Links. J. Intell. Robot. Syst. Theory Appl. 2020, 98, 227–237. [Google Scholar] [CrossRef]
- Mandischer, N.; Eddine, S.C.; Huesing, M.; Corves, B. Bots2ReC: Radar Localization in Low Visibility Indoor Environments. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics, Würzburg, Germany, 2–4 September 2019; pp. 158–163. [Google Scholar]
- Hadian Jazi, S.; Farahani, S.; Karimpour, H. Map-merging in multi-robot simultaneous localization and mapping process using two heterogeneous ground robots. Int. J. Eng. Trans. A Basics 2019, 32, 608–616. [Google Scholar]
- Lin, P.T.; Liao, C.A.; Liang, S.H. Probabilistic Indoor Positioning and Navigation (PIPN) of Autonomous Ground Vehicle (AGV) Based on Wireless Measurements. IEEE Access 2021, 9, 25200–25207. [Google Scholar] [CrossRef]
- Miranda-Vega, J.E.; Diaz-Ramirez, A.; Sergiyenko, O.; Garcia-Gonzalez, W.; Flores-Fuentes, W.; Rodriguez-Quinonez, J.C. Improvements of an optical scanning system for indoor localization based on defuzzification methods. IEEE Sens. J. 2021, 22, 4808–4815. [Google Scholar] [CrossRef]
- Serrano, F.J.; Moreno, V.; Curto, B.; Álves, R. Semantic localization system for robots at large indoor environments based on environmental stimuli. Sensors 2020, 20, 2116. [Google Scholar] [CrossRef]
- Geib, J.; Sippel, E.; Groschel, P.; Hehn, M.; Schutz, M.; Vossiek, M. A Wireless Local Positioning System Concept and 6D Localization Approach for Cooperative Robot Swarms Based on Distance and Angle Measurements. IEEE Access 2020, 8, 115501–115514. [Google Scholar] [CrossRef]
- Zhu, J.; Xu, L. Design and implementation of ROS-based autonomous mobile robot positioning and navigation system. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science, Wuhan, China, 8–10 November 2019; pp. 214–217. [Google Scholar]
- Jose, D.; Sebastian, S. Taylor series method in TDOA approach for indoor positioning system. Int. J. Electr. Comput. Eng. 2019, 9, 3927–3933. [Google Scholar] [CrossRef]
- Gao, H.; Zhang, X.; Li, C.; Chen, X.; Fang, Y.; Chen, X. Directional endpoint-based enhanced EKF-SLAM for indoor mobile robots. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Hong Kong, China, 8–12 July 2019; pp. 978–983. [Google Scholar]
- Lin, X.C.; Tsai, C.C.; Tai, F.C. Cooperative SLAM of an Autonomous Indoor Quadrotor Flying Together with an Autonomous Ground Robot. In Proceedings of the 2019 12th Asian Control Conference, Kitakyushu, Japan, 9–12 June 2019; pp. 885–889. [Google Scholar]
- Chen, M.Y. Bionic SLAM based on MEMS pose measurement module and RTAB-Map closed loop detection algorithm. Clust. Comput. 2019, 22, 5367–5378. [Google Scholar] [CrossRef]
- Liu, H.; Xu, Y.; Wu, X.; Lv, X.; Zhang, D.; Zhong, G. Big data forecasting model of indoor positions for mobile robot navigation based on apache spark platform. In Proceedings of the 2019 IEEE 4th International Conference on Cloud Computing and Big Data Analysis, Chengdu, China, 12–15 April 2019; pp. 378–382. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Papers | Positioning Technologies | Fusion Algorithm | Error Accuracy |
|---|---|---|---|
| [24] | IMU, Computer Vision (CV) | Adaptive Fade EKF | CV (x) = 0.11 m, CV (y) = 0.22 m CV + IMU (x) = 0.06 m, Vision + IMU (y) = 0.15 m |
| [25] | IMU, Computer Vision, Odometer | EKF | The average error of the simulation is 0.163 m, and the actual error is 0.3 m |
| [26] | IMU + Computer Vision/ LiDAR + Encoder | EKF | Max Error: CV + IMU (x) = 0.181 m, (y) = 0.101 m LiDAR + Encoder (x) = 0.138 m, (y) = 0.104 m |
| [27] | IMU, Computer Vision | Multimodel Multifrequency Kalman Filter | Mean Error: (x) = 0.0137 m, (y) = 0.0114 m |
| [28] | IMU, Computer Vision | RCNN | RMSE is 0.056 m |
| [29] | IMU, LiDAR | EKF | LiDAR (x) = 0.21 m, (y) = 0.26 m LiDAR/IMU (x) = 0.12 m, (y) = 0.14 m |
| [30] | IMU, LiDAR, Encoder, GPS | EKF | Centimeter-level accuracy |
| [31] | IMU, UWB | Sage–Husa fuzzy adaptive Filter | RMSE: UWB = 0.8038 m, UWB + IMU = 0.1440 m |
| [32] | IMU, UWB | Maximum Correlation Entropy Kalman Filter | RMSE: UWB = 0.171 m, UWB + IMU = 0.131 m |
| [33] | IMU, UWB | Constrained Robust Iterative Extension Kalman Filter | Mean Error: UWB = 0.36 m, UWB + IMU = 0.21 m |
| [34] | IMU, Odometer, GPS | ANN + Fuzzy Logic | Mean Error: (x) = 0.2847 m, (y) = 0.2631 m |
| [35] | IMU, Odometer, GPS | KF | The positioning trajectories in the paper are given in the form of graphs, with no specific values |
| [16] | IMU, VLC | EKF | RMSE is 0.04 m |
| [18] | IMU, Geomagnetic, Encoder | Self-Tuning Kalman Filter | The positioning trajectories in the paper are given in the form of graphs, with no specific values |
| [36] | IMU, Odometer, UWB, LiDAR | EKF | Max Error is 0.091 m |
| Technology | Accuracy Level | Hardware Costs | Computational Costs | Advantages | Disadvantages |
|---|---|---|---|---|---|
| IMU | 0.2 m [162] | Low | Low | Wide application Easy to use Anti-interference | Accumulated error |
| VLC | <0.05 m [44] | Low | Medium | Easy to deploy No electromagnetic interference | Only line-of-sight communication |
| Ultrasonic | 0.012 m [49] | Low | Low | Mature technology High positioning accuracy | Short-distance measurement Signal attenuation |
| IR | <0.1 m [48] | Medium | Low | Mature technology | Only line-of-sight communication Need environmental transformation Affected by sunlight |
| Geomagnetic | <0.21 m [55] | Low | Low | No cumulative error No need for environmental transformation | Low accuracy Build a geomagnetic database |
| LiDAR | <0.025 m [90] | High | High | Strong adaptability Strong stability No need for environmental transformation | High requirements for algorithms Affected by glass objects Suffer in weak feature environments |
| Computer Vision | 0.09 m [108] | Medium | High | Collection of rich information Strong adaptability No need for environmental transformation | High requirements for algorithms and computing performance Affected by light Suffer in weak feature environments |
| Wi-Fi | 2.31 m [136] | Medium | Medium | Widely used Mature technology Easy to deploy | Easy to be interfered with Multipath problem |
| Bluetooth | 0.27 m [143] | Low | Low | Wide application Low-power consumption | Path loss Easy to be interfered with |
| ZigBee | 0.71 m [128] | Low | Low | Low-power consumption Good topology | Poor stability Easy to be interfered with |
| RFID | <0.01 m [150] | Low | Low | High positioning accuracy Easy to deploy | Need environmental transformation Multipath problem |
| UWB | <0.1 m [161] | High | Medium | High positioning accuracy Anti-interference High multipath resolution | High cost |
| Citations | Numbers |
|---|---|
| ≥20 | 9 |
| ≥10 and <20 | 15 |
| ≥5 and <9 | 25 |
| ≥2 and <5 | 51 |
| =1 | 47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Junginger, S.; Liu, H.; Thurow, K. Indoor Positioning Systems of Mobile Robots: A Review. Robotics 2023, 12, 47. https://doi.org/10.3390/robotics12020047
Huang J, Junginger S, Liu H, Thurow K. Indoor Positioning Systems of Mobile Robots: A Review. Robotics. 2023; 12(2):47. https://doi.org/10.3390/robotics12020047
Chicago/Turabian StyleHuang, Jiahao, Steffen Junginger, Hui Liu, and Kerstin Thurow. 2023. "Indoor Positioning Systems of Mobile Robots: A Review" Robotics 12, no. 2: 47. https://doi.org/10.3390/robotics12020047
APA StyleHuang, J., Junginger, S., Liu, H., & Thurow, K. (2023). Indoor Positioning Systems of Mobile Robots: A Review. Robotics, 12(2), 47. https://doi.org/10.3390/robotics12020047