

A Novel Evolving Type-2 Fuzzy System for Controlling a Mobile Robot under Large Uncertainties


Abstract
1. Introduction
- A novel type-2 evolving fuzzy control system (T2-EFCS) supported by efficient pruning rules is introduced. The adaptive law is derived using the sliding mode control (SMC) theory to guarantee the systems’ robustness against uncertainties.
- The proposed closed-loop control system is employed to control a simulated mobile robot, where the robustness is investigated in the presence of external disturbance (e.g., noisy sensor measurements). For disturbance rejection, a new robustness term is added to obtain robust control performance against uncertainties.
- A rigorous comparative study with respect to three different controllers, such as T1-FLC, T2-FLC, and T1-EFCS, is performed, where the outcomes of this study illustrate the superiority of the proposed method with lower RMSE values.
- The stability analysis of the proposed method is implemented using the Lyapunov stability theory.
2. Problem Formulation
3. T2-EFCS Control System Design
3.1. T2-EFCS Architecture
- Layer 1 (Input layer): This layer is the input signals with vector. In this study, the error and its derivative are the two inputs to the system.
- Layer 3 (Firing layer): The firing strength is computed in this layer to perform the aggregation operation:where
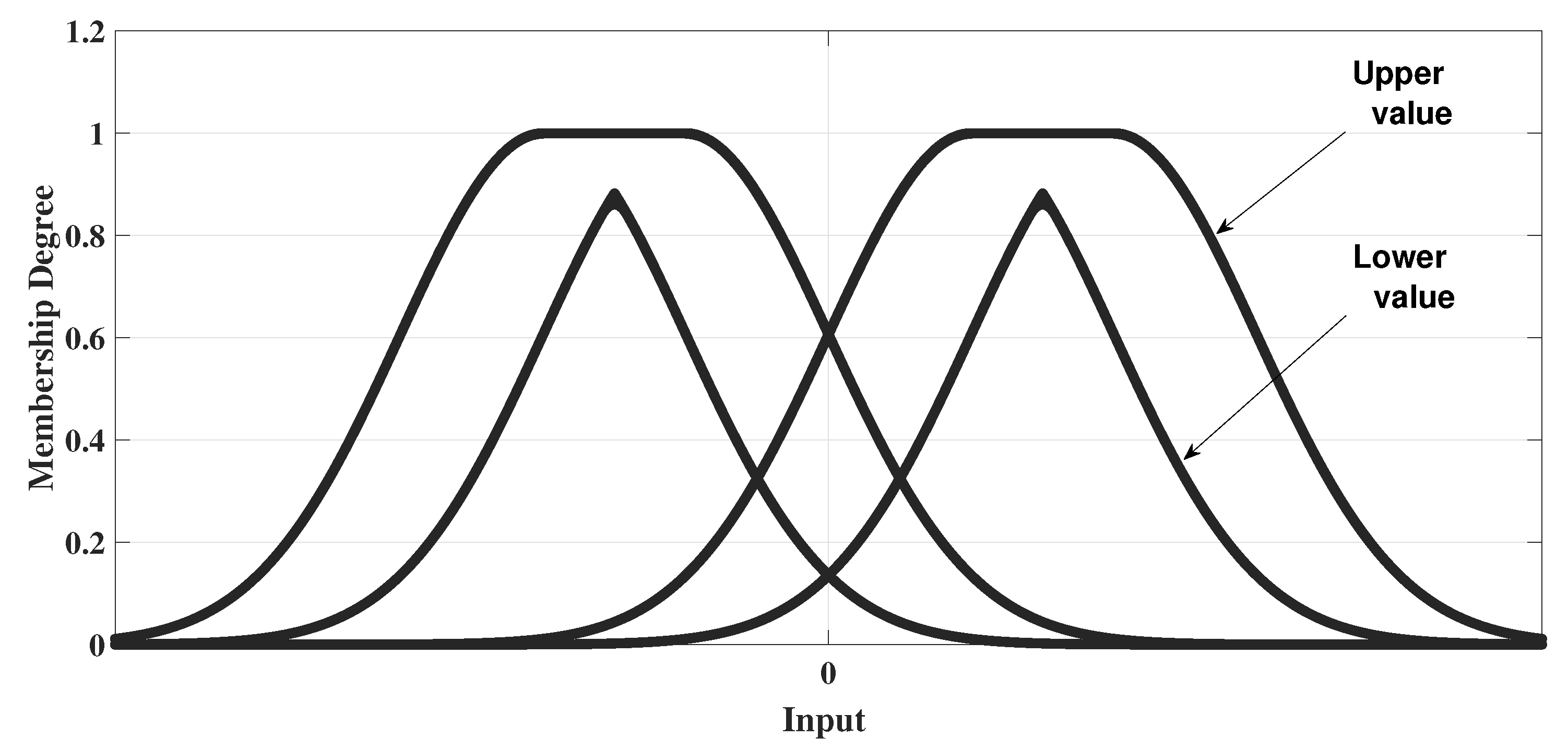
- Layer 4 (Consequent layer): the output of this layer has two consequent values as follows:where and are the upper and lower outputs of the consequent part, respectively. In this layer, the center-of-sets and the ‘Enhanced Iterative Algorithm with Stop Condition’ type-reducer were utilized to calculate the interval outputs .
- Layer 5 (Output layer): The computation of the output value of the last layer is given as follows:where represents a weighting parameter.
3.2. T2-EFCS Structure Learning
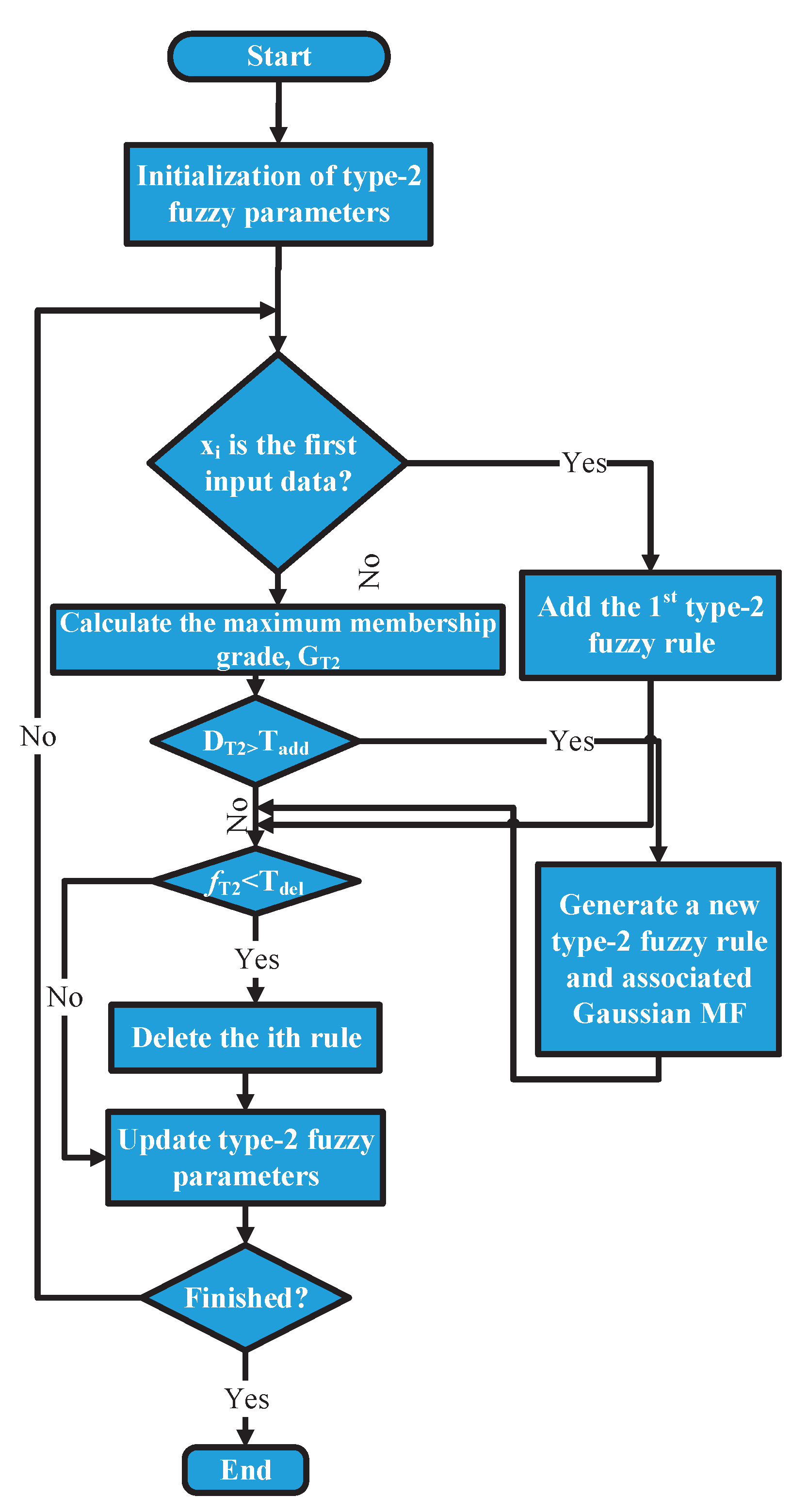
- Rule-Adding Mechanism: The rule generation of T2-EFCS is based on the distance between the incoming data and the upper and lower means of the type-2 Gaussian function so that when , a new rule is generated. The Euclidean distance of the upper and lower means can be computed using the following equation:where represents the incoming data of e and ; is the mean. If we define a MAX-MIN approach to identify when to add a new type-2 fuzzy rule as, , the T2-EFCS findswhere denotes a prior threshold value for rule generation.The initial type-2 fuzzy MF parameters are set aswhere denotes a predefined value (in this work, ), which determines the width of the membership functions associated with a newly generated rule, and are the uncertain center of the membership function associated with a newly generated rule, and is the width of uncertain region.Once a new type-2 fuzzy rule is generated, the same procedure implemented for the first rule is utilized to assign the uncertain mean and the width as follows:where represents an overlapping parameter ( is set to in this work), and represents the total number of type-2 fuzzy rules at the step.
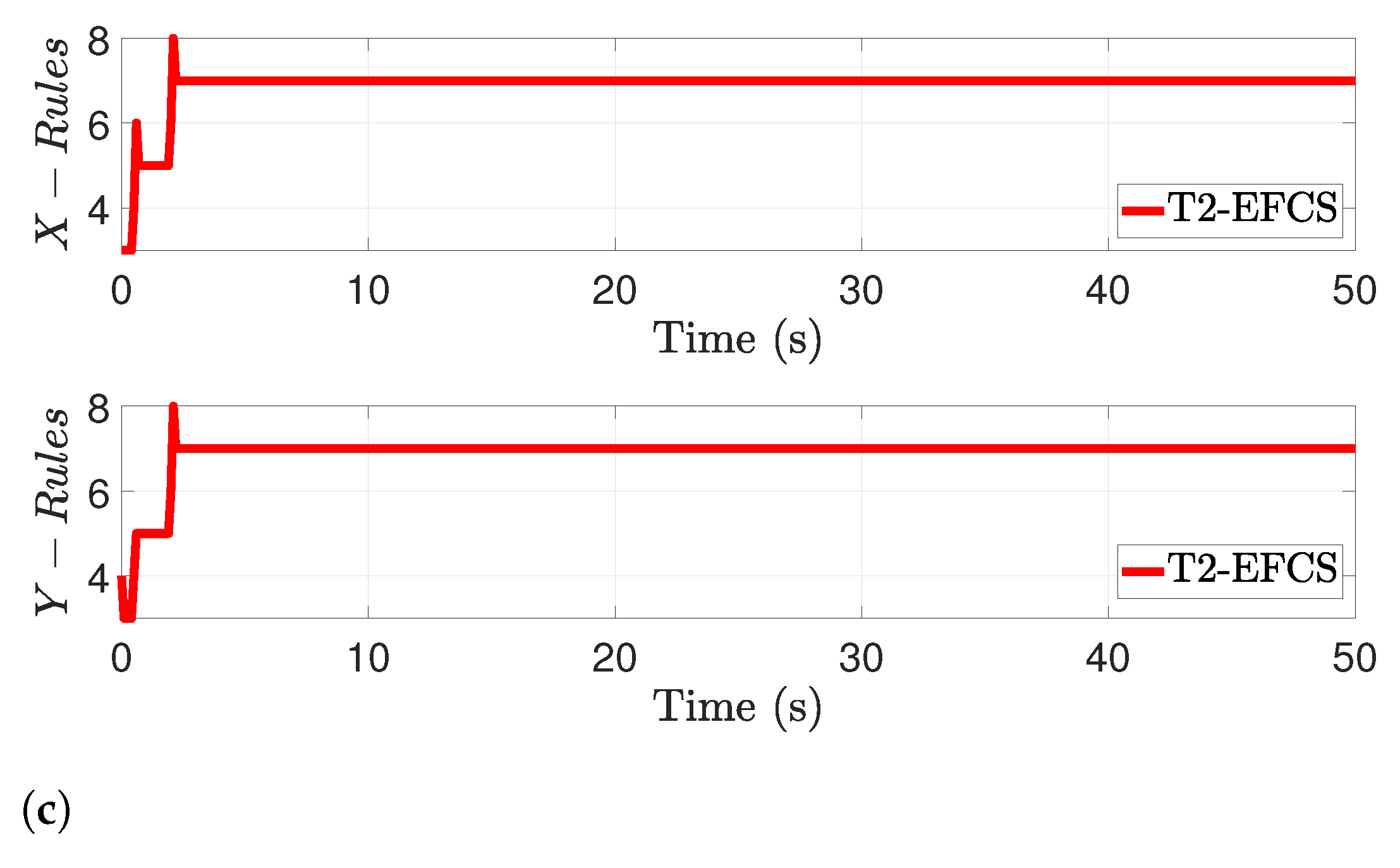
- Rule Pruning Mechanism: In this proposed technique, deleting unnecessary rules is considered. The process of pruning existing rules is based on the contribution of membership grade, so when it is smaller than the prior threshold value, the rule is deleted. This approach can be expressed as follows:where denotes a prior threshold value for rule deletion, and , which denotes the firing strength in (10) for each incoming data.Automatic rules generation and pruning are efficient, which determine the optimal number of fuzzy rules. Figure 2 illustrates the flowchart of the proposed method. The online update of type-2 fuzzy parameters is presented in the following section.
3.3. T2-EFCS Parameters Learning
3.4. T2-EFCS Robustness Term
4. T2-EFCS Stability Proof
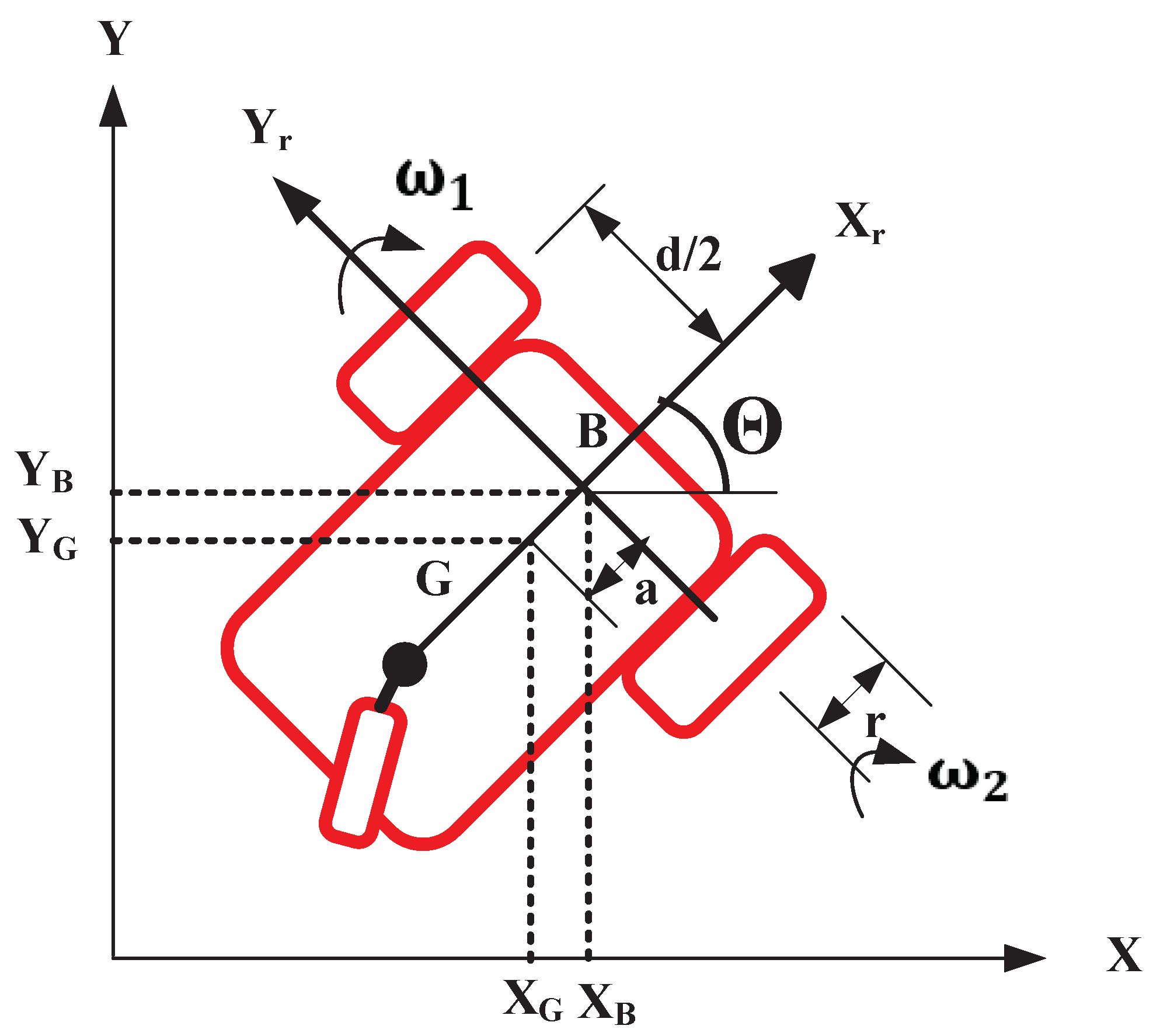
5. System Description for a Mobile Robot
6. Results and Discussion
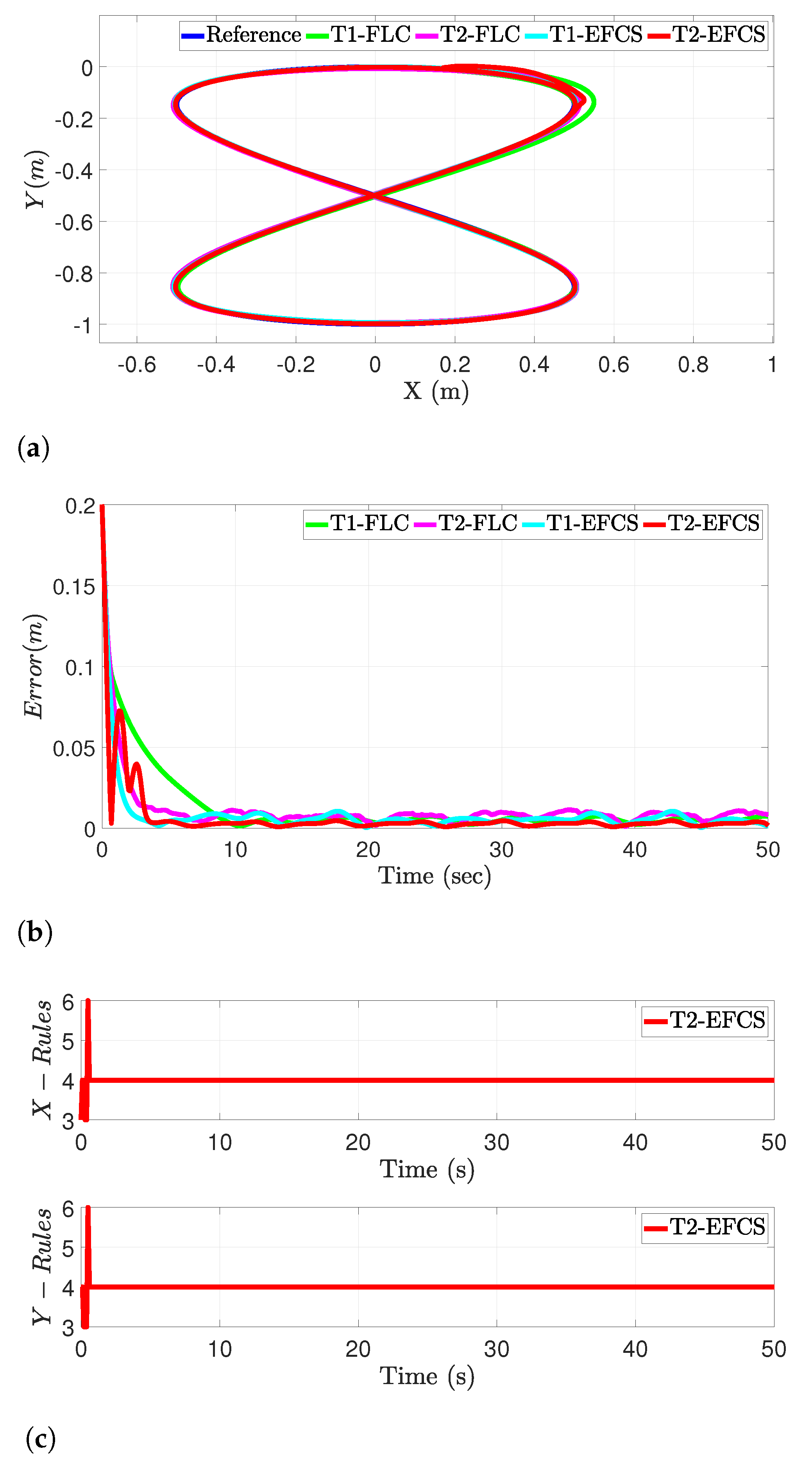
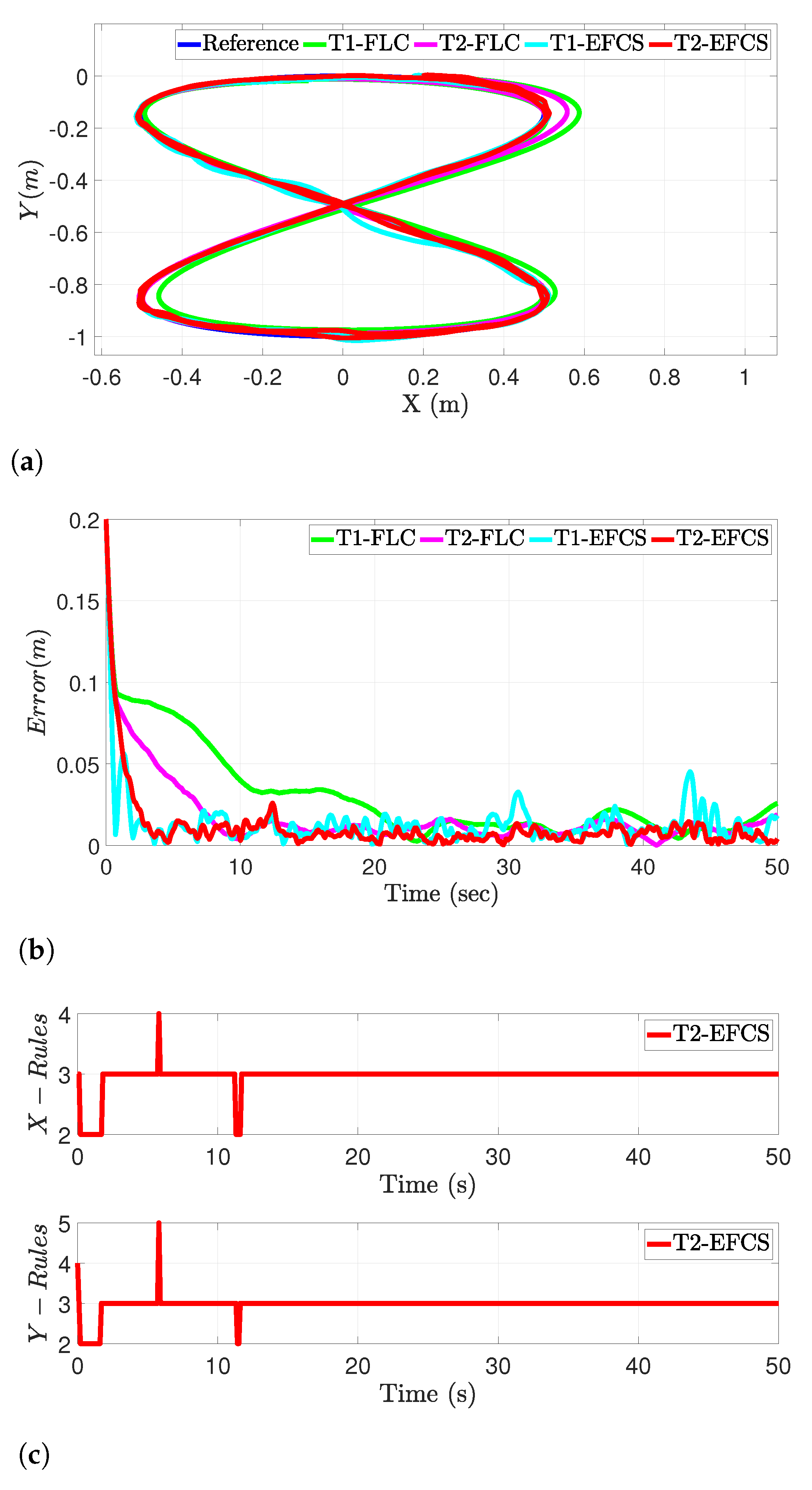
6.1. Performance in Nominal Condition
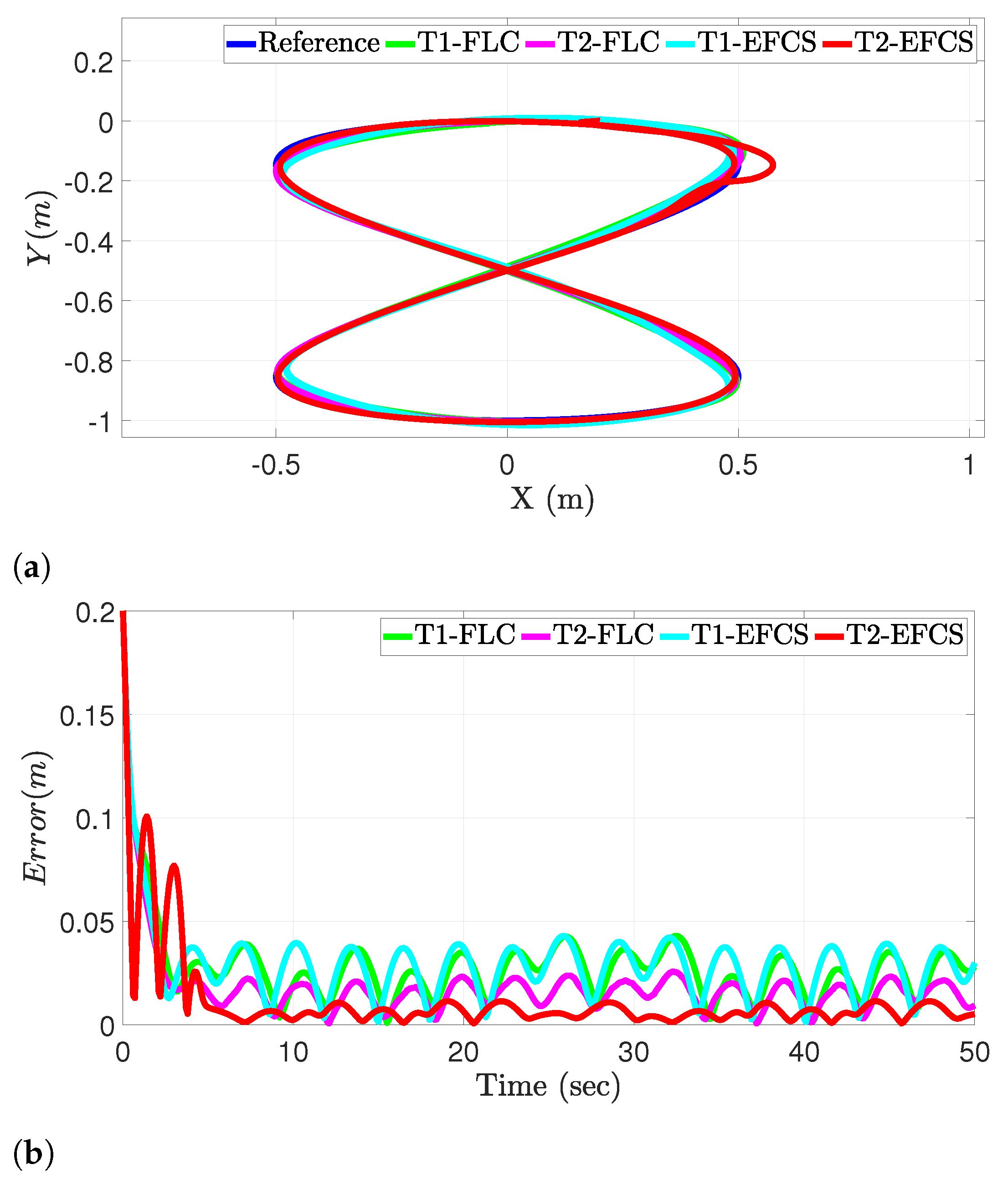
6.2. Performance in the Face of Measurement Noise
6.3. Performance under Unknown Disturbance
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chwa, D. Fuzzy adaptive tracking control of wheeled mobile robots with state-dependent kinematic and dynamic disturbances. IEEE Trans. Fuzzy Syst. 2011, 20, 587–593. [Google Scholar] [CrossRef]
- Al-Mayyahi, A.; Wang, W.; Birch, P. Adaptive Neuro-Fuzzy Technique for Autonomous Ground Vehicle Navigation. Robotics 2014, 3, 349–370. [Google Scholar] [CrossRef]
- Baturone, I.; Moreno-Velo, F.J.; Blanco, V.; Ferruz, J. Design of embedded DSP-based fuzzy controllers for autonomous mobile robots. IEEE Trans. Ind. Electron. 2008, 55, 928–936. [Google Scholar] [CrossRef]
- Kim, C.J.; Chwa, D. Obstacle Avoidance Method for Wheeled Mobile Robots Using Interval Type-2 Fuzzy Neural Network. IEEE Trans. Fuzzy Syst. 2015, 23, 677–687. [Google Scholar] [CrossRef]
- Chwa, D. Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2010, 40, 1285–1295. [Google Scholar] [CrossRef]
- Zou, J.; Schueller, J.K. Adaptive backstepping control for parallel robot with uncertainties in dynamics and kinematics. Robotica 2014, 32, 2. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, Y.; Liu, M. Self-learning interval type-2 fuzzy neural network controllers for trajectory control of a Delta parallel robot. Neurocomputing 2018, 283, 107–119. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Robust Adaptive Interval Type-2 Fuzzy Control for Autonomous Underwater Vehicles. In Proceedings of the 2019 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), Bali, Indonesia, 1–3 July 2019; pp. 19–24. [Google Scholar] [CrossRef]
- Al-Mahturi, A. Development of Self-Learning Type-2 Fuzzy Systems for System Identification and Control of Autonomous Systems. Ph.D. Thesis, UNSW Canberra, Canberra, Australia, 2021. [Google Scholar] [CrossRef]
- Juang, C.F.; Chang, Y.C. Evolutionary-group-based particle-swarm-optimized fuzzy controller with application to mobile-robot navigation in unknown environments. IEEE Trans. Fuzzy Syst. 2011, 19, 379–392. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Robust Self-Adaptive Interval Type-2 TS Fuzzy Logic for Controlling Multi-Input–Multi-Output Nonlinear Uncertain Dynamical Systems. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 655–666. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. Online System Identification for Nonlinear Uncertain Dynamical Systems Using Recursive Interval Type-2 TS Fuzzy C-means Clustering. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, Australia, 1–4 December 2020; pp. 1695–1701. [Google Scholar] [CrossRef]
- Huang, J.; Ri, M.; Wu, D.; Ri, S. Interval Type-2 fuzzy logic modeling and control of a mobile two-wheeled inverted pendulum. IEEE Trans. Fuzzy Syst. 2017, 26, 2030–2038. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. Self-Learning in Aerial Robotics Using Type-2 Fuzzy Systems: Case Study in Hovering Quadrotor Flight Control. IEEE Access 2021, 9, 119520–119532. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. An Intelligent Control of an Inverted Pendulum Based on an Adaptive Interval Type-2 Fuzzy Inference System. In Proceedings of the 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, 23–26 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.; Chen, Y. Implementation of evolutionary fuzzy systems. IEEE Trans. Fuzzy Syst. 1999, 7, 109–119. [Google Scholar] [CrossRef]
- Kasabov, N.K. Evolving Connectionist Systems: The Knowledge Engineering Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Škrjanc, I.; Iglesias, J.A.; Sanchis, A.; Leite, D.; Lughofer, E.; Gomide, F. Evolving fuzzy and neuro-fuzzy approaches in clustering, regression, identification, and classification: A survey. Inf. Sci. 2019, 490, 344–368. [Google Scholar] [CrossRef]
- Angelov, P.P. Evolving Rule-Based Models: A Tool for Design of Flexible Adaptive Systems; Physica; Springer: Berlin/Heidelberg, Germany, 2013; Volume 92. [Google Scholar]
- Lughofer, E.; Pratama, M. Online active learning in data stream regression using uncertainty sampling based on evolving generalized fuzzy models. IEEE Trans. Fuzzy Syst. 2017, 26, 292–309. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Simplified Model-Free Self-Evolving TS Fuzzy Controller for Nonlinear Systems with Uncertainties. In Proceedings of the 2020 IEEE Conference on Evolving and Adaptive Intelligent Systems (EAIS), Bari, Italy, 27–29 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Juang, C.F.; Lin, C.T. An online self-constructing neural fuzzy inference network and its applications. IEEE Trans. Fuzzy Syst. 1998, 6, 12–32. [Google Scholar] [CrossRef]
- Kasabov, N.K.; Song, Q. DENFIS: Dynamic evolving neural-fuzzy inference system and its application for time-series prediction. IEEE Trans. Fuzzy Syst. 2002, 10, 144–154. [Google Scholar] [CrossRef]
- Angelov, P.; Filev, D. Simpl_eTS: A simplified method for learning evolving Takagi-Sugeno fuzzy models. In Proceedings of the The 14th IEEE International Conference on Fuzzy Systems, Changsha, China, 27–29 August 2005; pp. 1068–1073. [Google Scholar] [CrossRef]
- Rong, H.J.; Sundararajan, N.; Huang, G.B.; Saratchandran, P. Sequential Adaptive Fuzzy Inference System (SAFIS) for nonlinear system identification and prediction. Fuzzy Sets Syst. 2006, 157, 1260–1275. [Google Scholar] [CrossRef]
- Angelov, P. Evolving Takagi-Sugeno fuzzy systems from streaming data (eTS+). In Evolving Intelligent Systems: Methodology and Applications; Wiley Online Library: Hoboken, NJ, USA, 2010; Volume 12, p. 21. [Google Scholar]
- Pratama, M.; Anavatti, S.G.; Angelov, P.P.; Lughofer, E. PANFIS: A Novel Incremental Learning Machine. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 55–68. [Google Scholar] [CrossRef]
- Ferdaus, M.M.; Pratama, M.; Anavatti, S.; Garratt, M.A.; Pan, Y. Generic evolving self-organizing neuro-fuzzy control of bio-inspired unmanned aerial vehicles. IEEE Trans. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Hsu, C.F.; Wong, K.Y. On-line constructive fuzzy sliding-mode control for voice coil motors. Appl. Soft Comput. 2016, 47, 415–423. [Google Scholar] [CrossRef]
- Rong, H.J.; Yang, Z.X.; Wong, P.K.; Vong, C.M.; Zhao, G.S. Self-evolving fuzzy model-based controller with online structure and parameter learning for hypersonic vehicle. Aerosp. Sci. Technol. 2017, 64, 1–15. [Google Scholar] [CrossRef]
- Juang, C.F.; Lu, C.F.; Tsao, Y.W. A Self-Evolving Interval Type-2 Fuzzy Neural Network for Nonlinear Systems Identification. IFAC Proc. Vol. 2008, 41, 7588–7593. [Google Scholar] [CrossRef]
- Juang, C.F.; Tsao, Y.W. A Type-2 Self-Organizing Neural Fuzzy System and Its FPGA Implementation. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 1537–1548. [Google Scholar] [CrossRef]
- Hassanein, O.; Anavatti, S.G.; Shim, H.; Salman, S.A. Auto-generating fuzzy system modelling of physical systems. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 1142–1147. [Google Scholar]
- Chen, C.H.; Lin, C.J.; Lin, C.T. A functional-link-based neurofuzzy network for nonlinear system control. IEEE Trans. Fuzzy Syst. 2008, 16, 1362–1378. [Google Scholar] [CrossRef]
- Pratama, M.; Lu, J.; Zhang, G. Evolving type-2 fuzzy classifier. IEEE Trans. Fuzzy Syst. 2016, 24, 574–589. [Google Scholar] [CrossRef]
- Lin, C.M.; Le, T.L.; Huynh, T.T. Self-evolving function-link interval Type-2 fuzzy neural network for nonlinear system identification and control. Neurocomputing 2018, 275, 2239–2250. [Google Scholar] [CrossRef]
- Chen, C.S.; Lin, W.C. Self-adaptive interval Type-2 neural fuzzy network control for PMLSM drives. Expert Syst. Appl. 2011, 38, 14679–14689. [Google Scholar] [CrossRef]
- Le, T.L.; Lin, C.M.; Huynh, T.T. Self-evolving type-2 fuzzy brain emotional learning control design for chaotic systems using PSO. Appl. Soft Comput. 2018, 73, 418–433. [Google Scholar] [CrossRef]
- Lin, C.M.; Chen, T.Y. Self-organizing CMAC control for a class of MIMO uncertain nonlinear systems. IEEE Trans. Neural Netw. 2009, 20, 1377–1384. [Google Scholar] [CrossRef] [PubMed]
- Le, T.L.; Huynh, T.T.; Lin, C.M. Self-Evolving Interval Type-2 Wavelet Cerebellar Model Articulation Control Design for Uncertain Nonlinear Systems Using PSO. Int. J. Fuzzy Syst. 2019, 21, 2524–2541. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. Modeling and Control of a Quadrotor Unmanned Aerial Vehicle Using Type-2 Fuzzy Systems. In Unmanned Aerial Systems: Theoretical Foundation and Applications; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Lin, Y.Y.; Liao, S.H.; Chang, J.Y.; Lin, C.T. Simplified interval type-2 fuzzy neural networks. IEEE Trans. Neural Netw. Learning Syst. 2014, 25, 959–969. [Google Scholar] [CrossRef] [PubMed]
- Al-Mahasneh, A.J.; Anavatti, S.; Garratt, M. Self-Evolving Neural Control for a Class of Nonlinear Discrete-Time Dynamic Systems with Unknown Dynamics and Unknown Disturbances. IEEE Trans. Ind. Inform. 2019, 16, 6518–6529. [Google Scholar] [CrossRef]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N.; Gaeid, K.S. Adaptive fuzzy sliding-mode control into chattering-free IM drive. IEEE Trans. Ind. Appl. 2014, 51, 692–701. [Google Scholar] [CrossRef]
- Martins, F.N.; Celeste, W.C.; Carelli, R.; Sarcinelli-Filho, M.; Bastos-Filho, T.F. An adaptive dynamic controller for autonomous mobile robot trajectory tracking. Control. Eng. Pract. 2008, 16, 1354–1363. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Q.; Chang, X.; Chao, F.; Lin, C.M.; Yang, L.; Huynh, T.T.; Zheng, L.; Zhou, C.; Shang, C. A Novel Self-Organizing Emotional CMAC Network for Robotic Control. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE Values (Nominal Condition) | |||
|---|---|---|---|
| Metrics | |||
| T1−FLC | 0.025 | 0.006 | 0.026 |
| T2−FLC | 0.021 | 0.005 | 0.022 |
| T1−EFCS | 0.018 | 0.004 | 0.019 |
| T2−EFCS | 0.017 | 0.005 | 0.018 |
| RMSE Values (Uncertain Condition-Noisy Sensor Data) | |||
|---|---|---|---|
| Metrics | |||
| T1−FLC | 0.0391 | 0.012 | 0.041 |
| T2−FLC | 0.0269 | 0.008 | 0.028 |
| T1−EFCS | 0.019 | 0.010 | 0.021 |
| T2−EFCS | 0.020 | 0.006 | 0.021 |
| RMSE Values (Uncertain Condition-External Disturbance) | |||
|---|---|---|---|
| Metrics | |||
| T1−FLC | 0.0307 | 0.0140 | 0.0337 |
| T2−FLC | 0.0232 | 0.0112 | 0.0258 |
| T1−EFCS | 0.0306 | 0.0164 | 0.0347 |
| T2−EFCS | 0.0224 | 0.0049 | 0.0229 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Novel Evolving Type-2 Fuzzy System for Controlling a Mobile Robot under Large Uncertainties. Robotics 2023, 12, 40. https://doi.org/10.3390/robotics12020040
Al-Mahturi A, Santoso F, Garratt MA, Anavatti SG. A Novel Evolving Type-2 Fuzzy System for Controlling a Mobile Robot under Large Uncertainties. Robotics. 2023; 12(2):40. https://doi.org/10.3390/robotics12020040
Chicago/Turabian StyleAl-Mahturi, Ayad, Fendy Santoso, Matthew A. Garratt, and Sreenatha G. Anavatti. 2023. "A Novel Evolving Type-2 Fuzzy System for Controlling a Mobile Robot under Large Uncertainties" Robotics 12, no. 2: 40. https://doi.org/10.3390/robotics12020040
APA StyleAl-Mahturi, A., Santoso, F., Garratt, M. A., & Anavatti, S. G. (2023). A Novel Evolving Type-2 Fuzzy System for Controlling a Mobile Robot under Large Uncertainties. Robotics, 12(2), 40. https://doi.org/10.3390/robotics12020040