
Reformulation of Theories of Kinematic Synthesis for Planar Dyads and Triads

Abstract
1. Introduction

2. Body
2.1. Precision Position Solution Methods
2.2. Compatibility Linkage Solution Procedure, Dyad for 4 Precision Points
2.3. Dyad in 5 Precision Positions
2.4. Triad in 5 Precision Positions
2.5. General Solution Procedure
2.6. Special Cases
2.7. Advantages of the Compatibility Linkage Method
2.8. Defects
2.9. Eight or More Precision Positions
2.10. Connections to General Burmester Theory
2.11. Closing Thoughts
3. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
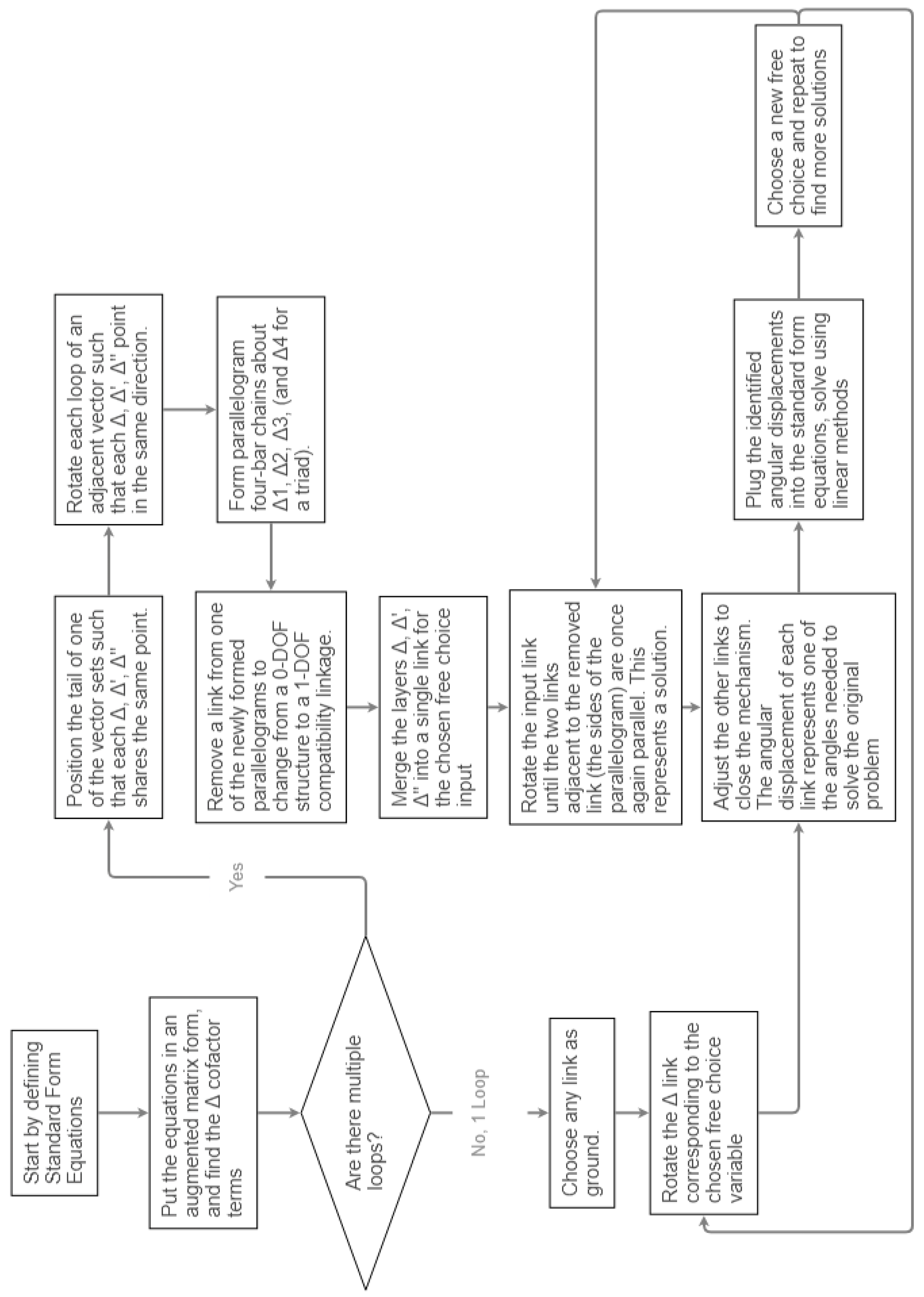
Appendix A. Detailed Solution Procedure for a Triad in Six and Seven Precision Positions Using the Method of Compatibility Linkages



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
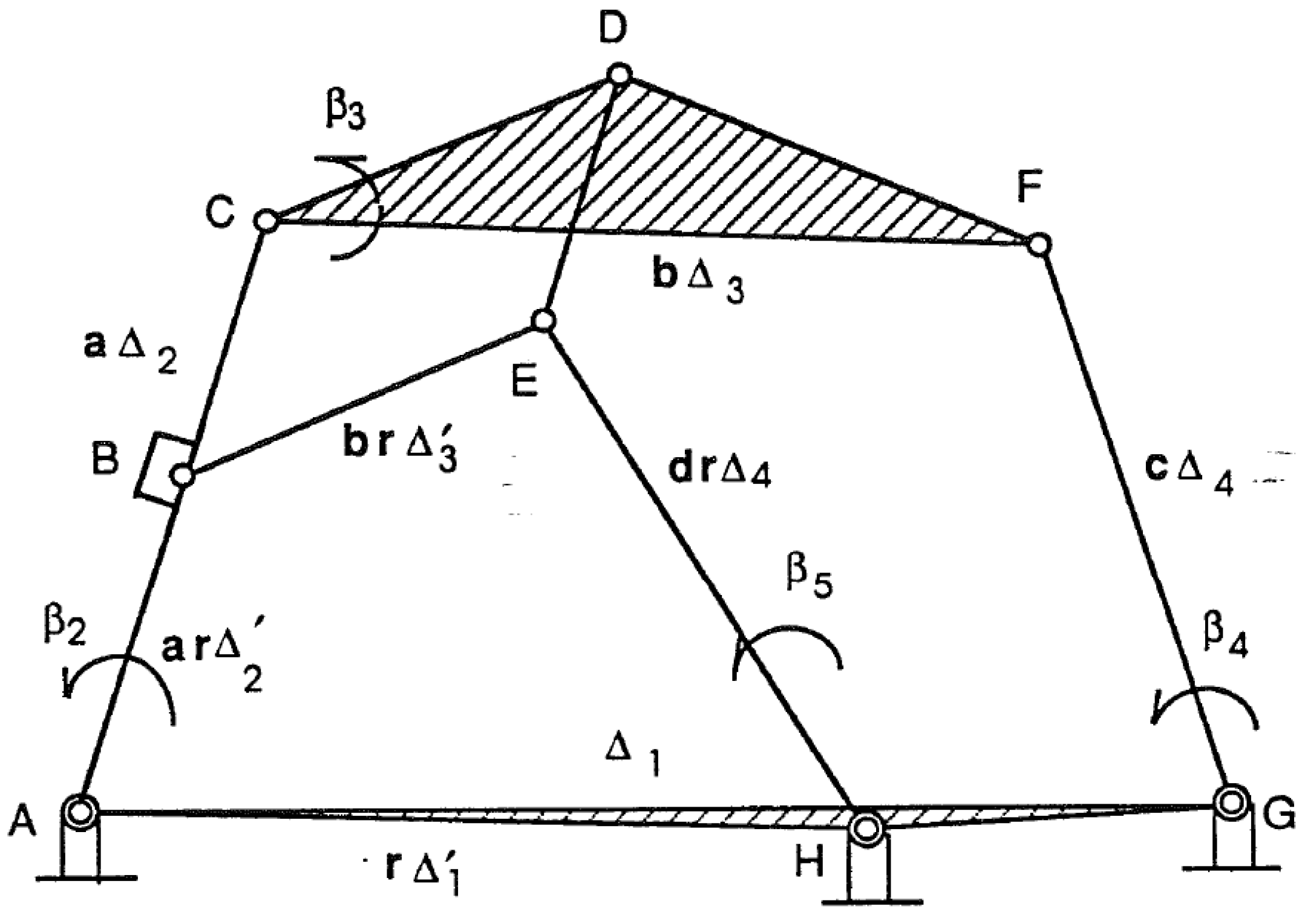
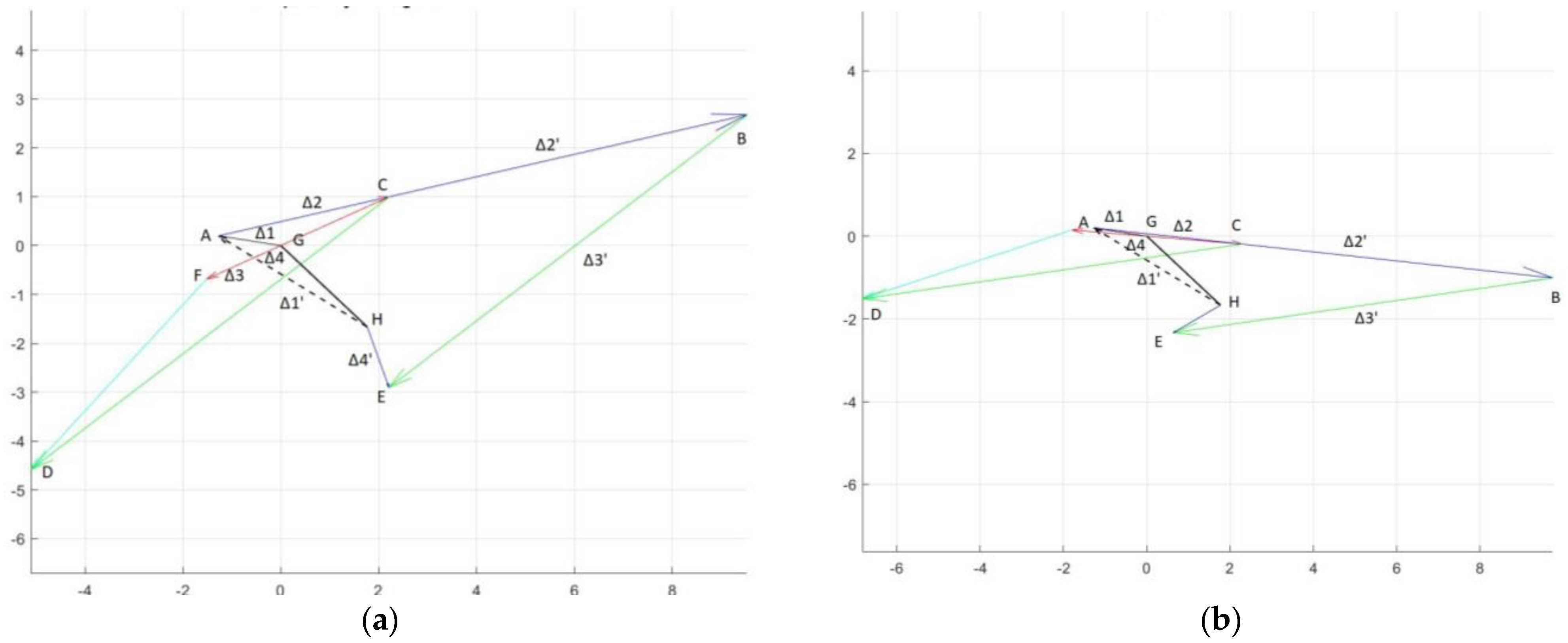
| Point | Position in Plane |
|---|---|
| A | (0,0) |
| B | Δ3′ |
| C | Δ3 |
| D | Δ3 + Δ4 |
| E | Δ3 + Δ4′ |
| F | Δ3′ + Δ4′ |
| G | −Δ2′ + Δ1 |
| H | −Δ2 + Δ1 |
| Link | Angular Displacement |
|---|---|
| AH | -β3 |
| BF * | β4-β3 |
| HD | β5-β3 |
| GF | β6-β3 |

Appendix B. Special Cases of the Triad Compatibility Linkage

References
- Needham, J. Science and Civilisation in China—Volume 4: Physics and Physical Technology; Cambridge University Press: Cambridge, UK, 1971; Available online: https://archive.org/details/principlesmecha02willgoog (accessed on 7 November 2022).
- Compass. Available online: https://education.nationalgeographic.org/resource/compass (accessed on 7 November 2022).
- Willis, R. Principles of Mechanism; Nabu Press: Charleston, SC, USA, 2010; Available online: https://archive.org/details/principlesmecha02willgoog/page/n8/mode/2up (accessed on 7 November 2022).
- Sandor, G.N.; Erdman, A.G. Advanced Mechanism Design: Analysis and Synthesis; Pearson: New York, NY, USA, 1984; Volume 2, ISBN 978-0130114372. [Google Scholar]
- Wampler, C.W.; Morgan, A.P.; Sommese, A.J. Numerical Continuation Methods for Solving Polynomial Systems Arising in Kinematics. J. Mech. Des. 1990, 112, 59–68. [Google Scholar] [CrossRef]
- Subbian, T.; Flugrad, D.R. Four-Bar Path Generation Synthesis by a Continuation Method. J. Mech. Des. 1991, 113, 63–69. [Google Scholar] [CrossRef]
- Subbian, T.; Flugrad, D.R. Six and Seven Position Triad Synthesis Using Continuation Methods. J. Mech. Des. 1994, 116, 660–665. [Google Scholar] [CrossRef]
- Pathak, V.K.; Singh, R.; Sharma, A.; Kumar, R.; Chakraborty, D. A Historical Review on the Computational Techniques for Mechanism Synthesis: Developments Up to 2022. Arch. Comput. Methods Eng. 2022. [Google Scholar] [CrossRef]
- Deshpande, S.; Purwar, A. Computational creativity via assisted variational synthesis of mechanisms using deep generative models. J. Mech. Des. Trans. ASME 2019, 141, 121402. [Google Scholar] [CrossRef]
- Baskar, A.; Bandyopadhyay, S. An algorithm to compute the finite roots of large systems of polynomial equations arising in kinematic synthesis. Mech. Mach. Theory 2019, 133, 493–513. [Google Scholar] [CrossRef]
- Zhao, P.; Ge, X.; Zi, B.; Ge, Q.J. Planar linkage synthesis for mixed exact and approximated motion realization via kinematic mapping. J. Mech. Robot. 2016, 8, 051004. [Google Scholar] [CrossRef]
- Re, F.M.; Williams, J.O. Chaise Lounge Recliner Chair. U.S. Patent 5,090,768A, 17 July 1991. [Google Scholar]
- Chase, T.R.; Erdman, A.G.; Riley, D.R. Triad Synthesis for up to Five Design Positions With Application to the Design of Arbitrary Planar Mechanisms. J. Mech. Transm. Autom. Des. 1987, 109, 426–434. [Google Scholar] [CrossRef]
- Freudenstein, F.; Sandor, G.N. Synthesis of Path-Generating Mechanisms by Means of a Programmed Digital Computer. J. Eng. Ind. 1959, 81, 159–167. [Google Scholar] [CrossRef]
- Hartenberg, R.; Denavit, J. Kinematic Synthesis of Linkages; McGraw-Hill: New York, NY, USA, 1964; Available online: https://idoc.pub/documents/r-hartenberg-j-denavit-kinematic-synthesis-of-linkages-1964pdf-jlk92zy1r745 (accessed on 10 November 2022).
- Hayes, M.J.D.; Zsombor-Murray, P.J. Solving the Burmester Problem Using Kinematic Mapping. In Proceedings of the ASME 2002 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 5: 27th Biennial Mechanisms and Robotics Conference, Montreal, QC, Canada, 29 September–2 October 2002; pp. 1439–1446. [Google Scholar] [CrossRef]
- Myszka, D.H.; Murray, A.P. Identifying sets of four and five positions that generate distinctive center-point curves. In Proceedings of the ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; pp. 463–473. [Google Scholar] [CrossRef]
- Chase, T.R.; Erdman, A.G.; Riley, D.R. Improved Centerpoint Curve Generation Techniques for Four-Precision Position Synthesis Using the Complex Number Approach. J. Mech. Trans. Autom. 1985, 107, 370–376. [Google Scholar] [CrossRef]
- Schaaf, J.A.; Lammers, J.A. Geometric Characteristics of the Center-Point Curve Based on the Kinematics of the Compatibility Linkage. In Proceedings of the ASME 1992 Design Technical Conferences. 22nd Biennial Mechanisms Conference: Mechanism Design and Synthesis, Scottsdale, AZ, USA, 13–16 September 1992; pp. 475–480. [Google Scholar] [CrossRef]
- Sakurai, S. Three-Position Variable Camber Krueger Leading Edge Flap. U.S. Patent 5,158,252A, 24 October 1991. [Google Scholar]
- Lin, C.S. Dimensional Synthesis of a Planar Triad for Six Precision Positions. Ph.D. Thesis, University of Minnesota, Twin Cities, MN, USA, 1987. [Google Scholar]
- Erdman, A.G.; Lonn, D. A Unified Synthesis of Planar Six-Bar Mechanisms Using Burmester Theory. In Proceedings of the Fourth World Congress on the Theory of Machines and Mechanisms, Newcastle Upon Tyne, UK, 8–12 September 1975; pp. 867–872. [Google Scholar]
- Berneman, C.; Bican, L.; Howard, M.; Oladepo, I. Kinematic Synthesis of a Drone Tilt Mechanism. Univ. Minn. Twin Cities Adv. Mech. Des. 2022, 1, 1–29. [Google Scholar]
- Rector, D.M. Linkage Mechanism Designer and Simulator. 2019. Available online: www.linkagesimulator.com (accessed on 6 September 2022).
- Rank of a Matrix. Available online: https://www.cuemath.com/algebra/rank-of-a-matrix/ (accessed on 17 October 2022).
- Erdman, A.G.; Chase, T.R. New Software Synthesizes Complex Mechanisms. Mach. Des. 1985, 57, 107–113. [Google Scholar]
- Yu, N.; Erdman, A.G.; Byers, B.P. LINCAGES 2000: Latest Developments and Case Study. In Proceedings of the ASME 2002 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 5: 27th Biennial Mechanisms and Robotics Conference, Montreal, QC, Canada, 29 September–2 October 2002; pp. 1421–1425. [Google Scholar] [CrossRef]
- Mirth, J.A.; Chase, T.R. Circuit Rectification for Four Precision Position Synthesis of Four-Bar and Watt Six-Bar Linkages. J. Mech. Des. 1995, 117, 612–619. [Google Scholar] [CrossRef]
- Lin, C.-S.; Erdman, A.G.; Jia, B.-P. Use of Compatibility Linkages and Solution Structures in the Dimensional Synthesis of Mechanism Components. Mech. Mach. Theory 1996, 31, 619–635. [Google Scholar] [CrossRef]
- Lu, X. A New Method to Group the Solutions from Dimensional Synthesis of Planar Triads for Six Prescribed Precision Positions. Master’s Thesis, University of Alaska, Fairbanks, AK, USA, 1992; p. 118. [Google Scholar]
- Mlinar, J.R.; Erdman, A.G. An Introduction to Burmester Field Theory. J. Mech. Des. 2000, 122, 25–30. [Google Scholar] [CrossRef]
- Mlinar, J.R. An Examination of the Features of the Burmester Field and the Linear Solution Geometry of Dyads and Triads. Ph.D. Thesis, University of Minnesota, Twin Cities, MN, USA, 1997. [Google Scholar]
- Peterson, R.; Logan, L.; Erdman, A.G.; Riley, D.R. Three Precision Point Synthesis of a Four Bar Linkage: An Example Using the LINCAGES-4 Program. In Proceedings of the Computers in Engineering 1988 Conference, San Francisco, CA, USA, 31 July–4 August 1988; pp. 91–96. [Google Scholar]
- Erdman, A.G.; Gustafson, J.E. LINCAGES: Linkage Interactive Computer Analysis and Graphically Enhanced Synthesis Package. Am. Soc. Mech. Eng. (Pap.) 1977, 77, 77-DET-5. [Google Scholar]
- Nelson, L.; Erdman, A.G. Recent Enhancements to the LINCAGES-6 Synthesis Package, including Circuit Rectification. In Proceedings of the ASME 1994 Design Technical Conferences collocated with the ASME 1994 International Computers in Engineering Conference and Exhibition and the ASME 1994 8th Annual Database Symposium. 23rd Biennial Mechanisms Conference: Mechanism Synthesis and Analysis, Minneapolis, MN, USA, 11–14 September 1994; pp. 263–271. [Google Scholar] [CrossRef]
- Holte, J.E.; Chase, T.R.; Erdman, A.G. Approximate Velocities in Mixed Exact-Approximate Position Synthesis of Planar Mechanisms. J. Mech. Des. 1999, 123, 388–394. [Google Scholar] [CrossRef]
- Holte, J.E.; Chase, T.R.; Erdman, A.G. Mixed Exact-Approximate Position Synthesis of Planar. J. Mech. Des. 2000, 122, 278–286. [Google Scholar] [CrossRef]
- Tesar, D.; Sparks, J.W. Multiply Separated Position Synthesis. ASME Paper 1968, 3, 68-MECH-66. [Google Scholar] [CrossRef]















| Dyad/ Triad | Number of Positions | Number of Scalar Equations | Number of Scalar Unknowns | Number of Free Choices | Number of Solutions |
|---|---|---|---|---|---|
| Dyad | 2 | 2 | 5 | 3 | |
| Dyad | 3 | 4 | 6 | 2 | |
| Dyad | 4 | 6 | 7 | 1 | |
| Dyad | 5 | 8 | 8 | 0 | Finite * |
| Triad | 2 | 2 | 7 | 5 | |
| Triad | 3 | 4 | 8 | 4 | |
| Triad | 4 | 6 | 9 | 3 | |
| Triad | 5 | 8 | 10 | 2 | |
| Triad | 6 | 10 | 11 | 1 | |
| Triad | 7 | 12 | 12 | 0 | Finite * |
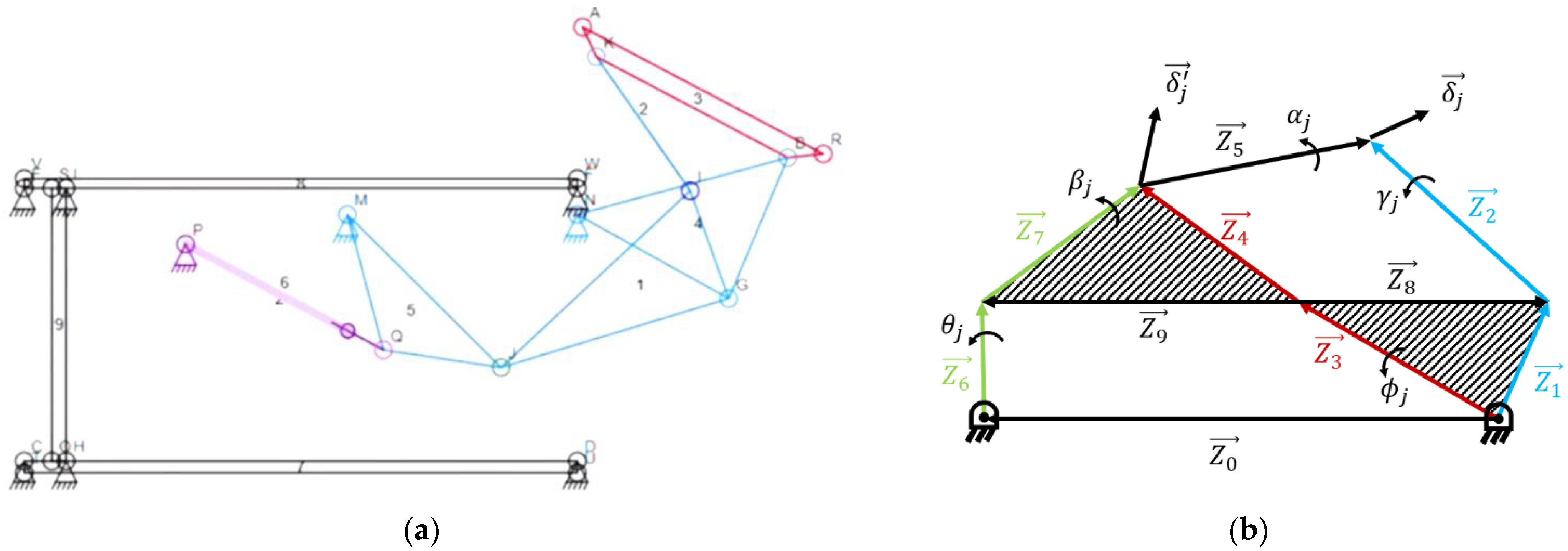
| Link | Vector (PP1) |
|---|---|
| Z0 | −3.377 + 0i |
| Z1 | 0.405 − 3.178i |
| Z2 | 0 + 3.178i |
| Z3 | −1.522 − 2.037i |
| Z4 | −0.436 + 1.620i |
| Z5 | 2.364 + 0.416i |
| Z6 | −1.560 − 2.773i |
| Z7 | 2.978 + 2.357i |
| Z8 | 1.927 − 1.141i |
| Z9 | −3.170 − 0.684i |
| Dyad/ Triad | Number of Positions | Number of Links | Number of Cofactor Matrices | Procedure | Compatibility Linkage BKC |
|---|---|---|---|---|---|
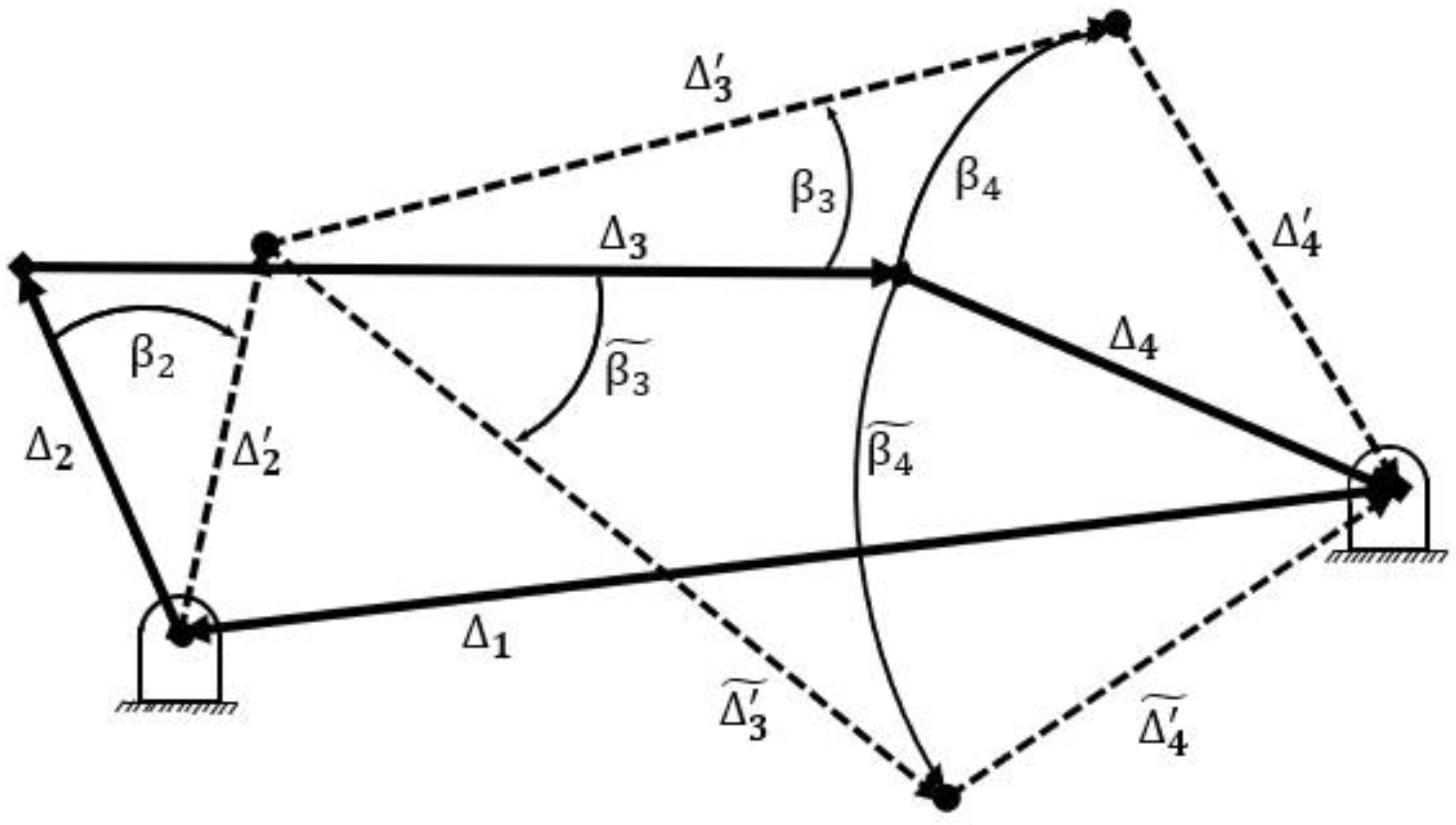
| Dyad | 4 | Four-bar compatibility linkage | 4; Δ1, Δ2, Δ3, Δ4 |
1. Write standard form equations, put them in an augmented matrix form, write the cofactor matrices 2. Create Δ1 as the sum of Δ2–4, then draw the linkage. 3.Rotate Δ2 by β2, rotate Δ3 and Δ4 to close the loop. 4. Read off the angular displacement of Δ3 and Δ4 to get β3 and β4. |  |
| Dyad | 5 | Seven—bar structure, six-bar compatibility linkage | 7; Δ1, Δ2, Δ3, Δ4, Δ1′, Δ2′, Δ3′ | 1. Write standard form equations, put them in an augmented matrix form, write the cofactor matrices. There are two sets, Δ and Δ′. 2. Using a consistent scale, plot both complete loops, with the base of the Δ1 links at the same x, y position 3. Rotate either loop until Δ2 and Δ2′ are colinear. 4. Form a parallelogram about the Δ3 links, creating point D. 5. Remove the newly formed link DE to find the final compatibility linkage. 6. Rotate Δ2 by β2, adjusting other links accordingly. Positions where BE and CD are parallel represent solutions. |  [21] (p. 109) |
| Triad | 5 | Five-bar 2-DOF compatibility linkage | 5; Δ1, Δ2, Δ3, Δ4, Δ5 | Repeat steps 1–4 of the dyad in 4PP. The difference is that the loop has five links instead of four, so the designer will need to set two free choices, typically the angles of Δ2 and Δ5. |  [21] (p. 113) |
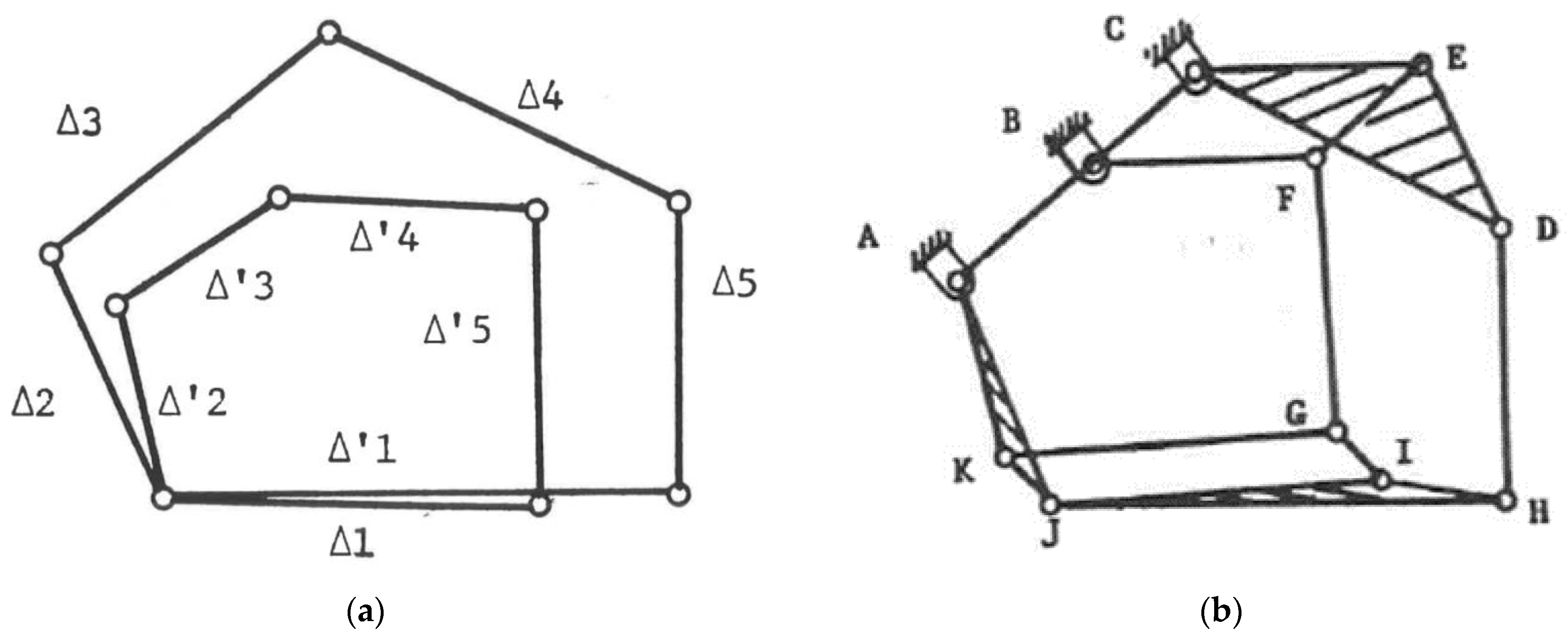
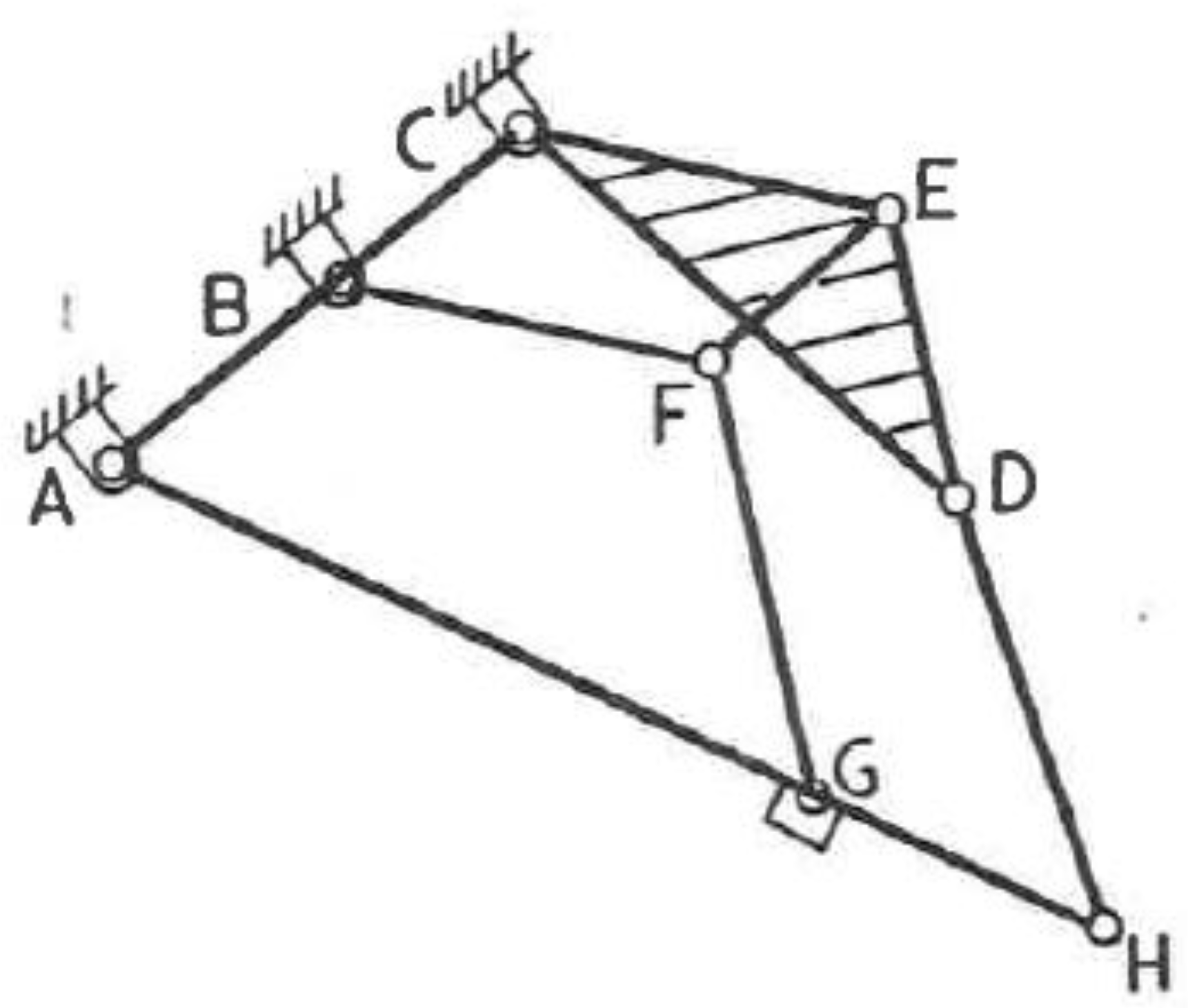
| Triad | 6 | Eleven-bar structure, ten-bar compatibility linkage | 9; Δ1, Δ2, Δ3, Δ4, Δ5, Δ1′, Δ2′, Δ3′, Δ4′ | Repeat steps 1–6 for the dyad in five positions. In the example at right, Δ3 is used as the ground pivot. There are two parallelogram loops to form in step four. One about Δ4, forming BCEF, and one about Δ1, forming GIJK. Remove a link from either parallelogram to convert to the compatibility linkage. |  [21] (p. 35) |
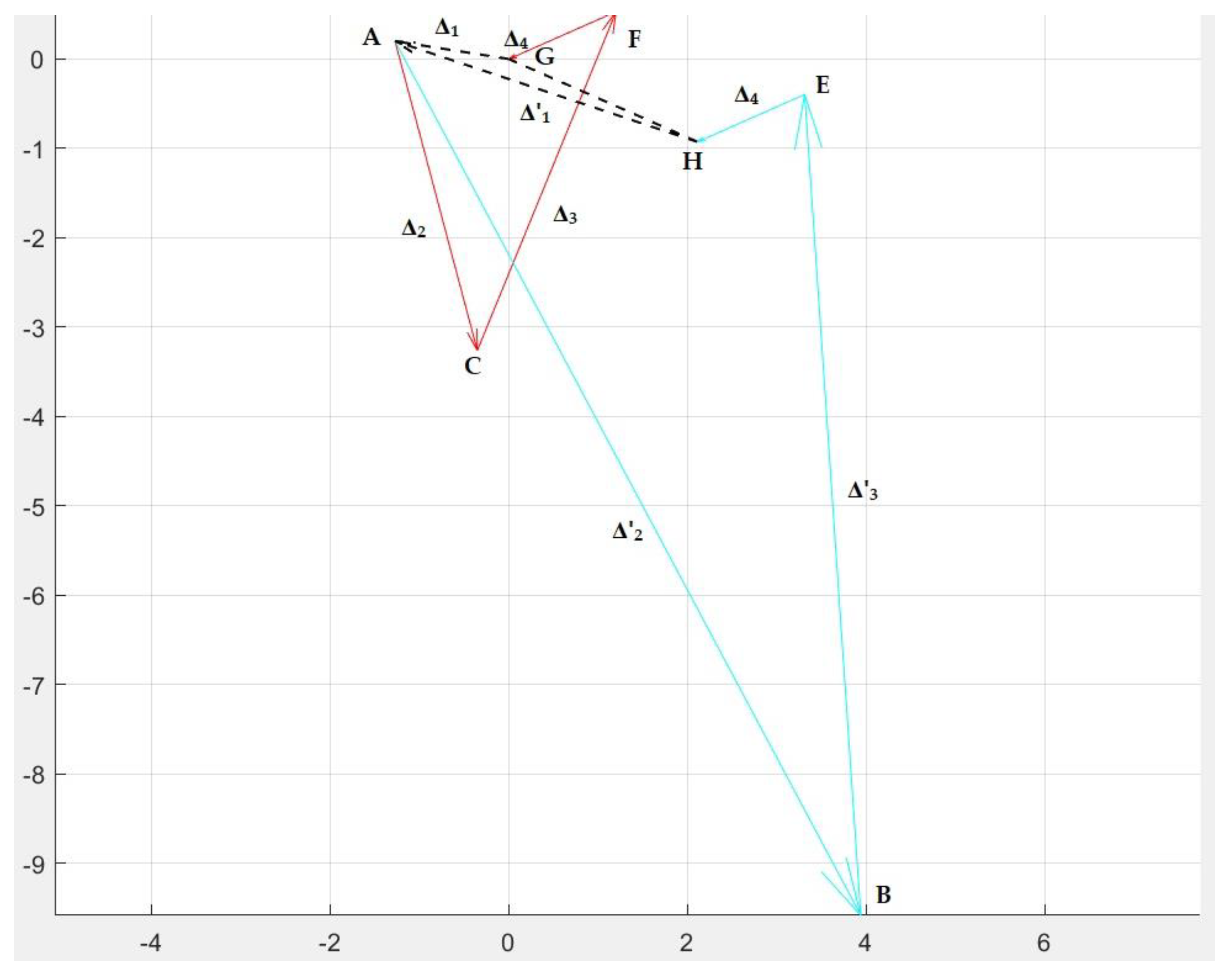
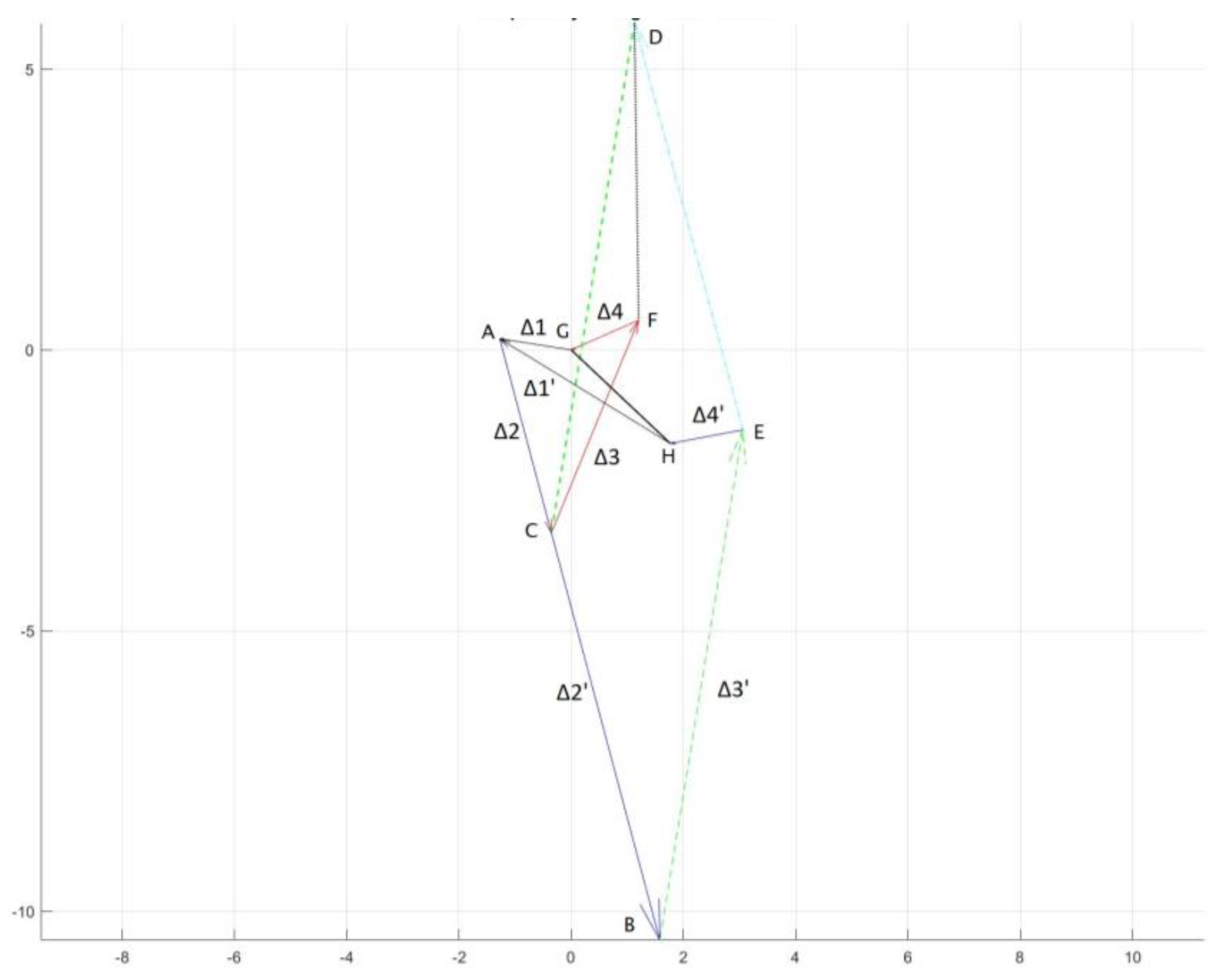
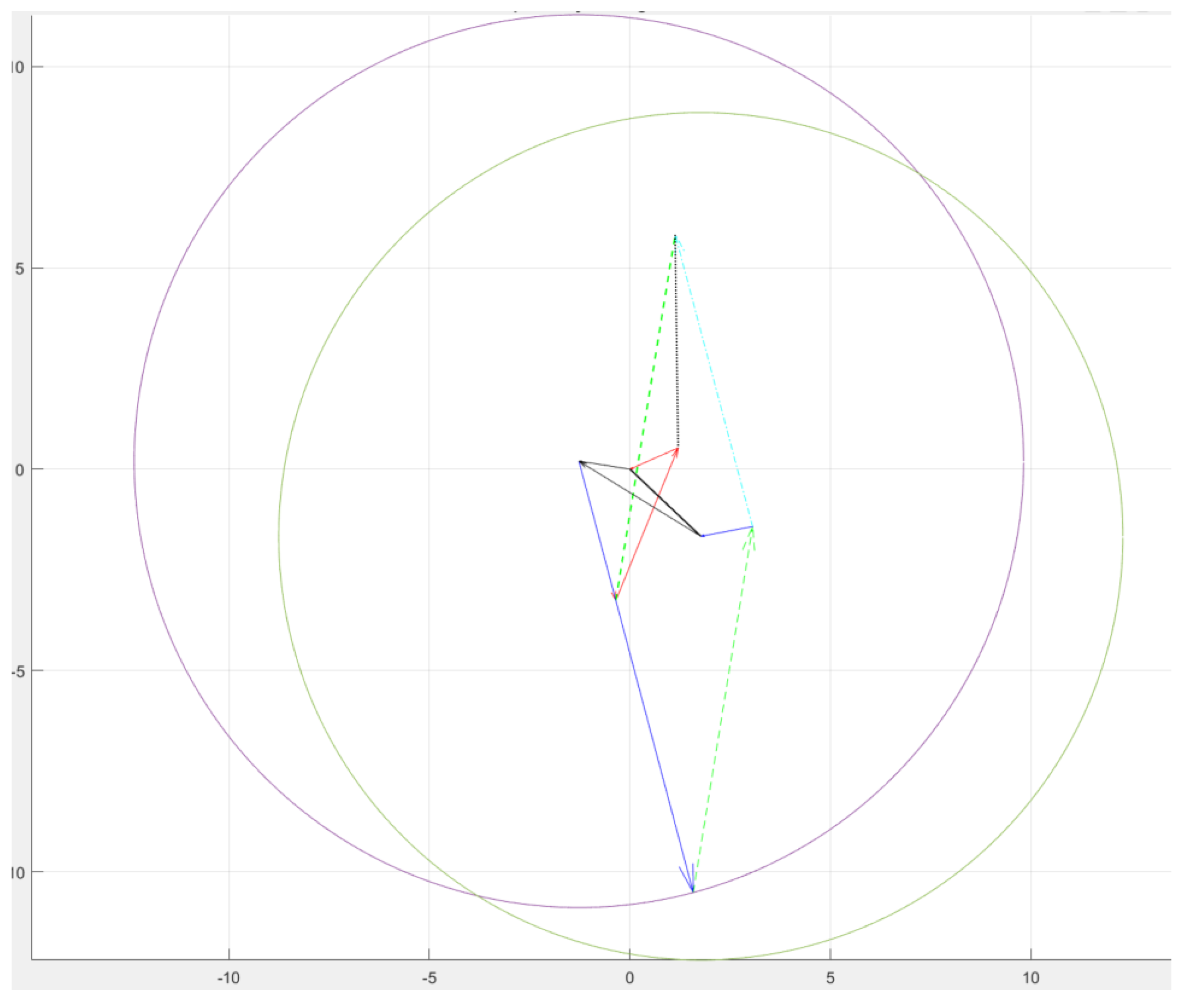
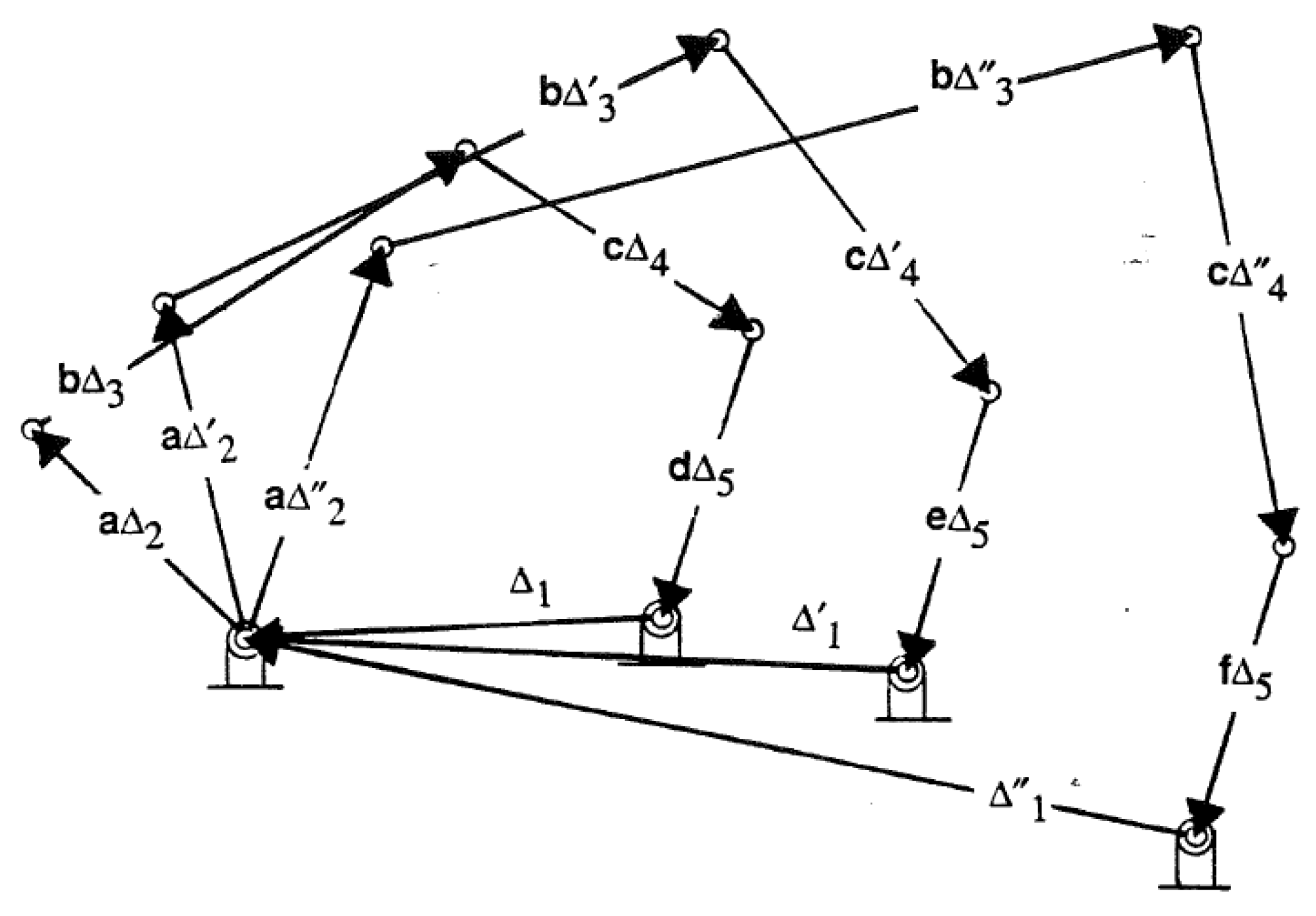
| Triad | 7 | Fifteen-bar structure, fourteen-bar compatibility linkage | 13; Δ1, Δ2, Δ3, Δ4, Δ5, Δ1′, Δ2′, Δ3′, Δ4′, Δ1″, Δ2″, Δ3″, Δ4″ | Repeat steps 1–6 for the dyad in five positions. There are several parallelogram loops to form in step four. Loops should be formed between each layer of the linkage. Here, they are formed about Δ4 and Δ1, and the layers of link Δ2 are fused to form a single link. Remove a link from any parallelogram to convert to the compatibility linkage *. |  [21] (p. 117) |
| Position | Coordinates | Alpha (deg) |
|---|---|---|
| 1 | −21.700 + 22.035i | 0 |
| 2 | −11.883 + 12.018i | 19.684 |
| 3 | −5.973 + 11.767i | 30.751 |
| 4 | 4.744 + 10.766i | 59.361 |
| 5 | 5.345 + 12.318i | 84.696 |
| Delta Link | Vector Coordinates |
|---|---|
| Δ1 | −1.2736 + 0.1990i |
| Δ2 | 0.9214 − 3.4612i |
| Δ3 | 1.5541 + 3.7924i |
| Δ4 | −1.2018 − 0.5302i |
| Δ1′ | −3.3851 + 1.1261i |
| Δ2′ | 5.2149 − 9.7840i |
| Δ3′ | −0.6280 + 9.1881i |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mather, S.; Erdman, A. Reformulation of Theories of Kinematic Synthesis for Planar Dyads and Triads. Robotics 2023, 12, 22. https://doi.org/10.3390/robotics12010022
Mather S, Erdman A. Reformulation of Theories of Kinematic Synthesis for Planar Dyads and Triads. Robotics. 2023; 12(1):22. https://doi.org/10.3390/robotics12010022
Chicago/Turabian StyleMather, Sean, and Arthur Erdman. 2023. "Reformulation of Theories of Kinematic Synthesis for Planar Dyads and Triads" Robotics 12, no. 1: 22. https://doi.org/10.3390/robotics12010022
APA StyleMather, S., & Erdman, A. (2023). Reformulation of Theories of Kinematic Synthesis for Planar Dyads and Triads. Robotics, 12(1), 22. https://doi.org/10.3390/robotics12010022