1. Introduction
Multi-rotor drones and their novel structures and designs have been an attractive topic for researchers and industries in recent years. Typical multi-rotor drones have four, six, and eight rotors and can be controlled to perform different maneuvers by changing their propellers’ speed. They have been used in a wide variety of applications such as search and rescue [
1,
2], agriculture [
3,
4], data collection and monitoring [
5,
6], health assistance missions (for COVID-19) [
7], and many other tasks. However, due to their high power requirements, their nonlinearities, and coupled flight effects, multi-rotor drones usually have short mission times and are difficult to control, especially under the presence of internal (e.g., failures) and external (e.g., wind) disturbances. Therefore, a new configuration of multi-rotor drones with two motors/propellers that can reduce the unit time power demand was introduced in [
8]. By reducing the number of propellers, bi-copter airframes not only provide a less power-hungry eVTOL (Electric Vertical Take-off and Landing) aircraft but the aerodynamic interaction of the propellers with the fuselage and the ground (aerodynamic wall and ground effects) decreases, thus reducing the typical adverse effects during flight. Similar drones have enhanced flying acrobatic capabilities not seen in typical eVTOL systems (e.g., pitched hover); they have also been developed to fly inside confined spaces using diverse control schemes [
9,
10,
11]. Although such aircraft are complex, they provide the characteristics for developing and testing new control strategies that can be extended to control other VTOL vehicles having advanced flight capabilities, such as the highly maneuverable drones for confined spaces developed at the University of Calgary [
12]. Although the aircraft introduced in [
8] is relatively simple when compared to other tiltrotor aircraft (e.g., [
12] and V-22 Osprey), it is a nonlinear system [
13], and has the ability, at least in theory, to maneuver through small spaces providing a suitable testbed platform to develop and test concept (enhanced) controllers for sophisticated eVTOL aircraft systems.
Several works have developed traditional PID controllers for position and attitude tracking of bi-copter drones [
8,
14,
15,
16]. Although somewhat effective, such techniques have a number of drawbacks. For starters, a linearized model of the aircraft is typically used, which provides an approximation of the behavior and flight capabilities of such systems. To really exploit the capabilities of such systems, nonlinear models should be used that describe the motion-coupling and aerodynamic effects inherited by the flying mechanisms. Second, any linearized model is only viable within minor deviations from the equilibrium or trim point. Thus, performance can suffer significantly if the aircraft drifts away from its intended design/flight trim point. As a result, gain scheduling is frequently used to achieve somewhat acceptable performance across the whole flight envelope.
A variety of nonlinear flight control systems have been proposed and developed in the hopes of overcoming some of the theoretical constraints and downsides of linear controller design. Examples of nonlinear control methods to control the motion of flying robots include feedback linearization [
17], backstepping [
10,
13,
18,
19], predictive [
9,
20,
21], and sliding mode control [
22,
23,
24]. Although these methods provide the ability to control drones in different conditions, they are highly dependent on the accuracy of the vehicle’s dynamic model. Furthermore, such controllers also have limited capability to cope with unknown internal or external disturbances affecting the aircraft flight and the uncertainties (accuracy) of the mathematical model.
Among such controllers, the feedback linearization technique has attracted the most attention as it has proven to have the most potential to control diverse Unmanned Aerial Vehicles (UAVs) [
25]. The most important feature of the associated synthesis process for this type of controller is that gain scheduling is no longer required. A characteristic that other controllers share.
Nonlinear dynamic inversion (NDI) is a feedback linearization candidate methodology that aims to remove gain scheduling by inverting and canceling the inherent dynamics and replacing them with a set of user-selected desirable dynamics [
26]. Because of these factors, NDI is a promising control design method extending the capabilities of other control techniques, especially for aircraft having large flight maneuvering envelopes. However, the main challenge in using feedback linearization for air vehicle control is that it necessitates extensive knowledge of the nonlinear dynamic model of the system and, therefore, cannot deal with the uncertainties [
27]. Because these are approaches based on system knowledge, they are referred to as model-based solutions. However, the model accuracy requirement can be costly and time-consuming. In the case of aircraft control, where there are a number of uncertainties, such as aerodynamic coefficients (coefficients that change based on the flight maneuver being performed), extensive wind tunnel tests as well as flight and CFD studies are required to be able to properly generate the needed aircraft’s mathematical model.
Because of the general advancement of micro-electromechanical systems (MEMS), smaller, more accurate, and more accessible sensors are now available. This enables sensor-based control approaches in which model knowledge can be replaced by variable measurements to be developed. Incremental nonlinear dynamics inversion (INDI) is one such sensor-based control approach [
28,
29,
30,
31] in which the incremental control input replaces the total control input used in NDI. For this, the incremental control input is calculated based on the performance of the system in the previous time step via sensor measurements. Therefore, INDI is less dependent on the dynamic model of the system and model uncertainties. However, this technique is required to be executed at a high-frequency using accurate sensor data and/or accurate variable estimation.
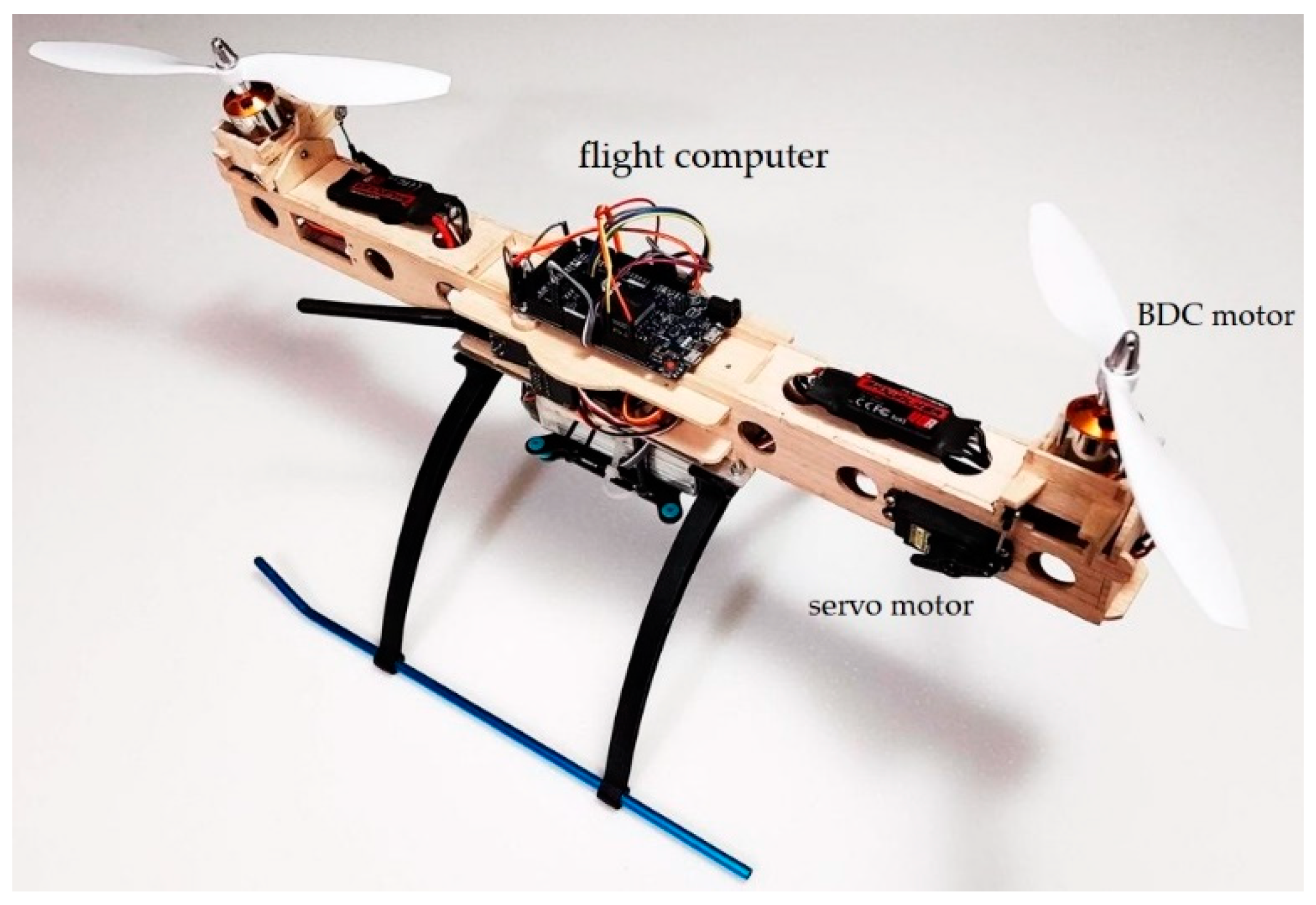
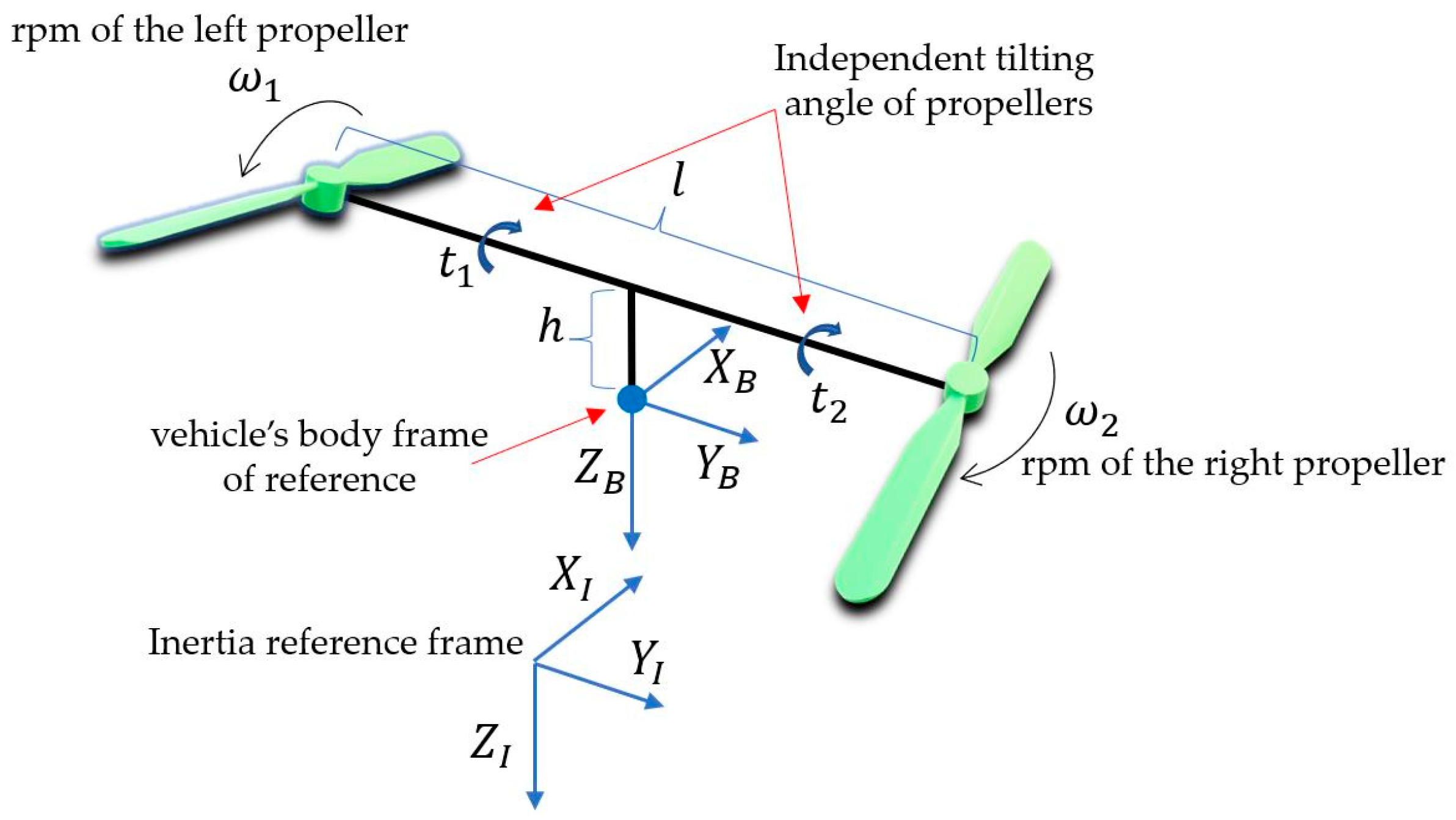
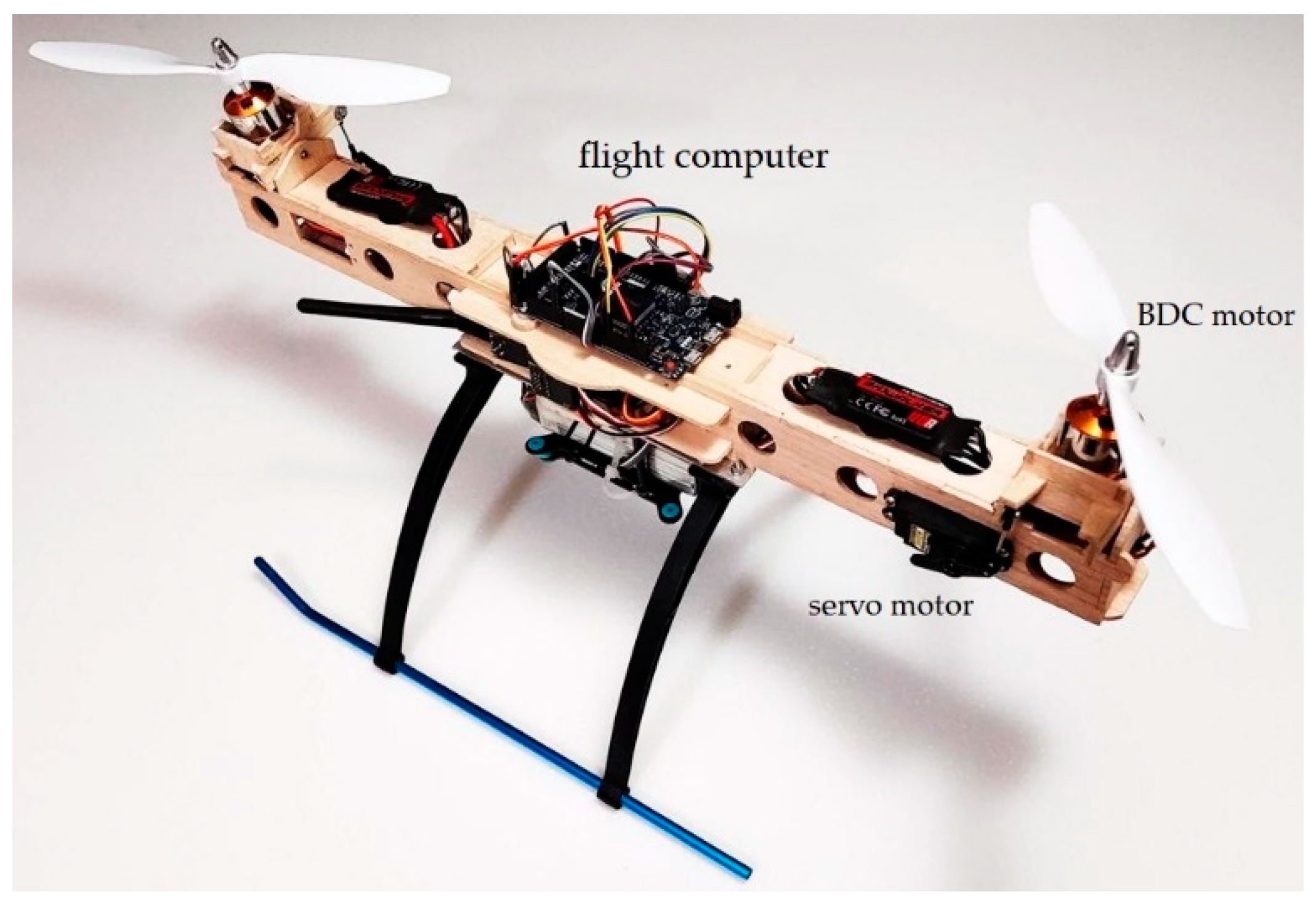
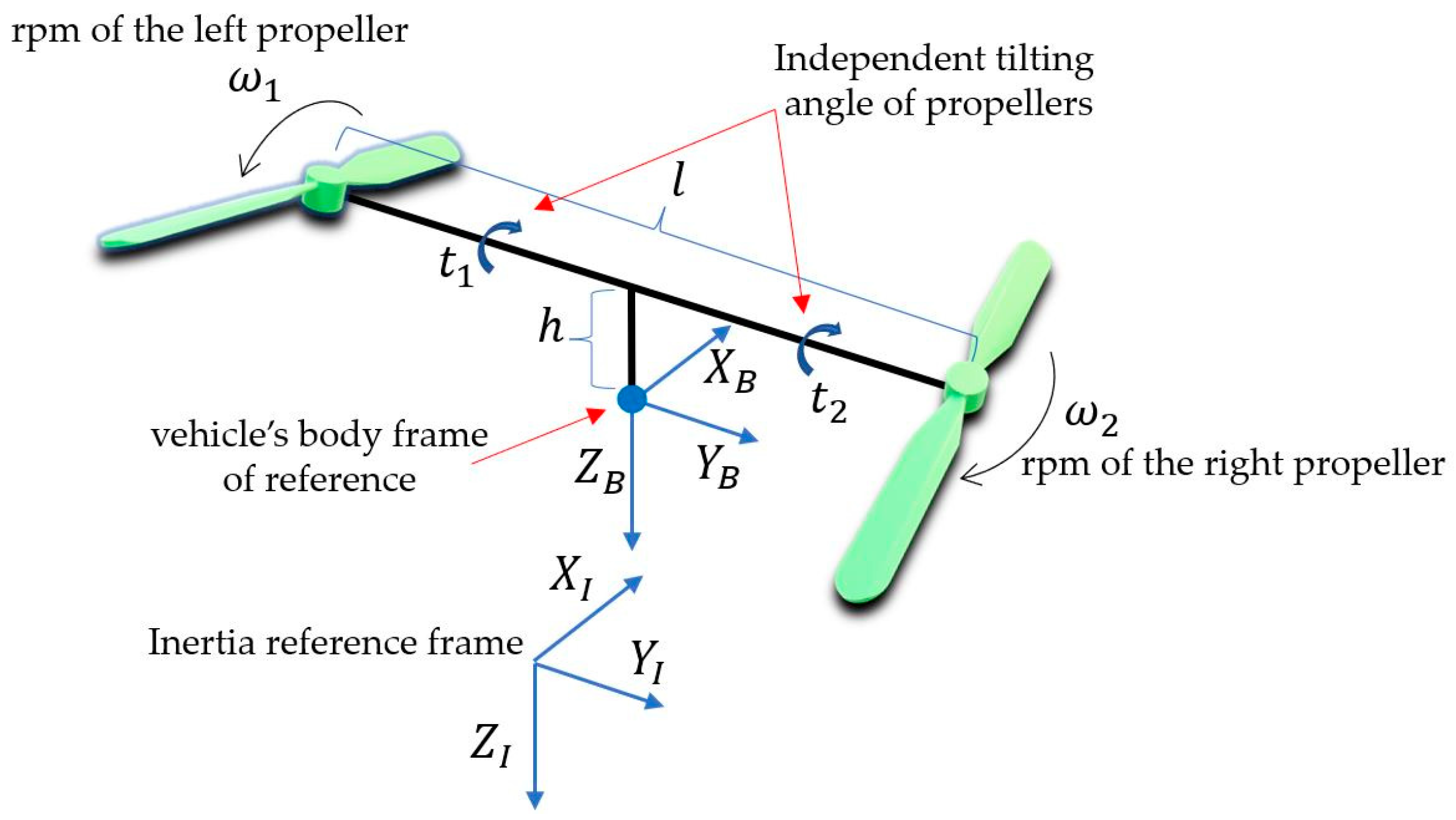
In this paper, a nonlinear mathematical model of the bi-copter presented in [
13] and shown in
Figure 1 is developed.
The control architecture includes the development of a novel multi-loop trajectory controller designed based on INDI and PID controller formulations. First, an inner-loop controller is designed for high-performance attitude tracking, followed by the development of an outer loop that tracks position variables via an NDI controller. The outer loop generates attitude commands that appropriately orient the tilting rotor forces to generate the required translational accelerations. This two-loop control approach generally requires timescale separation where the outer-loop bandwidth must be significantly lower than the inner-loop bandwidth. Following the typical system linearization performed in INDI (or NDI), it is now possible to use the linear control to stabilize each state of the UAV (position and orientation) separately.
PID controllers have been developed and used in diverse fields such as industrial control, energy, as well as in the control of unmanned aircraft. However, optimizing the three parameters required in any PID controller is a difficult task, especially when several performance indices are to be met at the same time. There exist several common methodologies, including Pole placement and Lyapunov theory, to obtain linear control parameters for a given system, including the control gains to use, but there is not an accurate method of tuning these parameters [
32].
In the area of UAVs, diverse methods have been developed to obtain optimal parameters (e.g., gains) for numerous aircraft. Examples of such techniques include Min–Max parameter optimization, where researchers have used DI airplane flight controller (e.g., [
32]), and fuzzy proportional/integral/derivative (fuzzy-PID) design [
33].
In this paper, the NSGA-II optimization algorithm is used to optimize the PID parameters of the bi-copter’s INDI controller. According to [
34], NSGA-II can find a much wider range of solutions and converge closer to the true optimal solution when compared to other evolutionary algorithms (EA).
In this paper, a bi-copter drone similar to the one presented in [
21] is used to develop a novel INDI controller for autonomous operation. Due to the complexities associated with the control of such a drone concept (e.g., coupled dynamics), prior work only considered the development of a backstepping (BKS) controller to operate the aircraft under benign flight conditions [
21] and tracking relatively simple trajectories (defined as a set of points in 3D space) without explicit system (drone) orientation. Since BKS requires explicit system model information, such a solution was highly sensitive to model uncertainties and prone to poor disturbance rejection. This paper provides an improved control solution based on the combination of the incremental nonlinear dynamic inversion (INDI) strategy with simple PID controllers, which reduces model dependency and enhances disturbance rejection. The proposed controller is a novel architecture that can be easily applied to diverse systems beyond autonomous aircraft, especially those with complex dynamics operating in the presence of inner and/or outer disturbances, such as wind gusts and system failures. The proposed control architecture employs an offline optimization technique to tune the required PID control gains, which provides effective results even with minimal tuning efforts.
The paper is divided into four sections:
Section 2 extracts the bi-copter’s nonlinear mathematical model;
Section 3 describes the proposed dynamic inversion method and
Section 4 describes the NSGA-II optimization algorithm. Numerical simulations are presented in
Section 5, followed by the conclusions in
Section 6.
3. Controller Design
Aircraft do not always behave as linear systems. This is especially true when performing aggressive maneuvers or experiencing internal or external disturbances or when the aircraft’s design is non-traditional such as bi-copters and tiltrotor aircraft. Thus, in some flight regimes, including failure scenarios, they behave in a nonlinear fashion. To control them effectively and efficiently, one must use nonlinear controllers. Such controllers must also be robust, as the mathematical models used to derive the corresponding controller never exactly matches the real-world system.
In this paper, nonlinear dynamic inversion (NDI) and incremental NDI (INDI) are considered. The reason is that such controllers have been proven to perform much better than linear controllers (e.g., PID) in terms of disturbance rejection [
28,
29] (as one example) and are easier to use for controlling nonlinear systems. Moreover, such controllers offer the possibility for very robust control.
3.1. Controller Formulation
3.1.1. Nonlinear Dynamics Inversion
Considering the general equation of the motion for a Multi Input Multi Output (MIMO) system [
35], the equation of the motion of the bi-copter tiltrotor UAV has the following form (Equations (6) and (7)):
where
is the system’s state vector,
is the control input vector,
and
are smooth nonlinear vector fields (functions), and
is one of the system’s model matrix where each column contains values defined as
.
By differentiating Equation (7) with respect to time, Equation (8) is obtained:
where
and
are the Lie Derivatives of
with respect to
and
, respectively. Assuming
is invertible, it is possible to isolate the (virtual) control action
u as shown in Equation (9).
Equation (9) uses a reasonable assumption, which guarantees that the function
satisfies the zero typical conditions of the
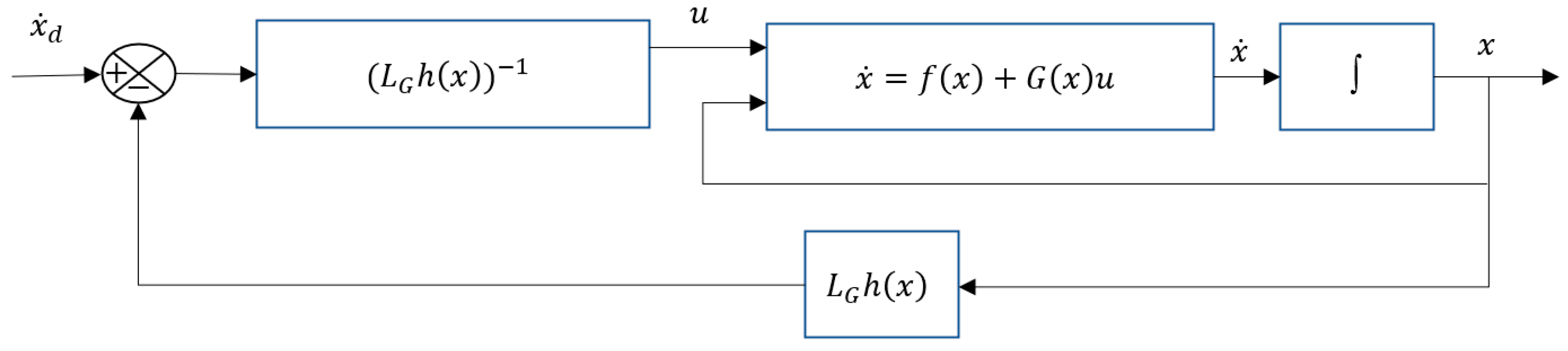
while avoiding unfeasible system configurations. This is possible by defining limitations to the equations describing the aircraft’s behavior. In turn, such determinants can be easily obtained via a pseudo-inverse computation to avoid any singularity of the controller. Applying this control action to (6) results in a closed-loop linearized system of the form
. A block diagram describing such an approach is presented in
Figure 3.
Although effective, the linearization process described above has limitations derived from the relative degree of each output y and the rank of matrix . For the purpose of this paper, the relative degree of an output denotes the number of differentiations needed to capture a given input (also known as the control command) u explicitly in terms of . If there are outputs having higher relative degrees when compared to the other outputs, then it is possible to linearize them directly with either NDI or INDI. The rank of can also be used to represent the number of state’s derivatives that are directly affected by the control action u. If this rank k is not equal to the total number of states n, then (n − k) states cannot be linearized directly (i.e., zero dynamics states).
3.1.2. Incremental Nonlinear Dynamics Inversion
In contrast to NDI, INDI has no requirements for input dynamics. Thus, it is possible to use a more generic formulation for nonlinear systems, as requested by Equation (10), where
is a nonlinear function:
If the model described by Equation (10) is used to develop a controller running with a sampling time, ∆T, it is possible to linearize Equation (10) around the previous time step, t
0 = t − ∆T, where the system’s state was defined by (
x0,
u0), as represented by Equation (11).
where
,
, and
denote the state derivative, state, and control input parameters evaluated/obtained at the previous time step, and
and
are the partial derivatives of
with respect to x
0 and u
0 at the previous time step. Assuming a small enough sampling time, ∆T is used; considering the fast actuators’ dynamic of the UAV, the state variation between samples can be considered negligible (
x ≈
x0). Thus, it is possible to further simplify (11) via Taylor series, resulting in Equation (12).
Setting the desired dynamics as
the following control input is obtained:
where
(
) must be invertible and
, and
must be observable. To make sure
is invertible in all time steps,
must be a square matrix with a non-zero determinant. In cases when
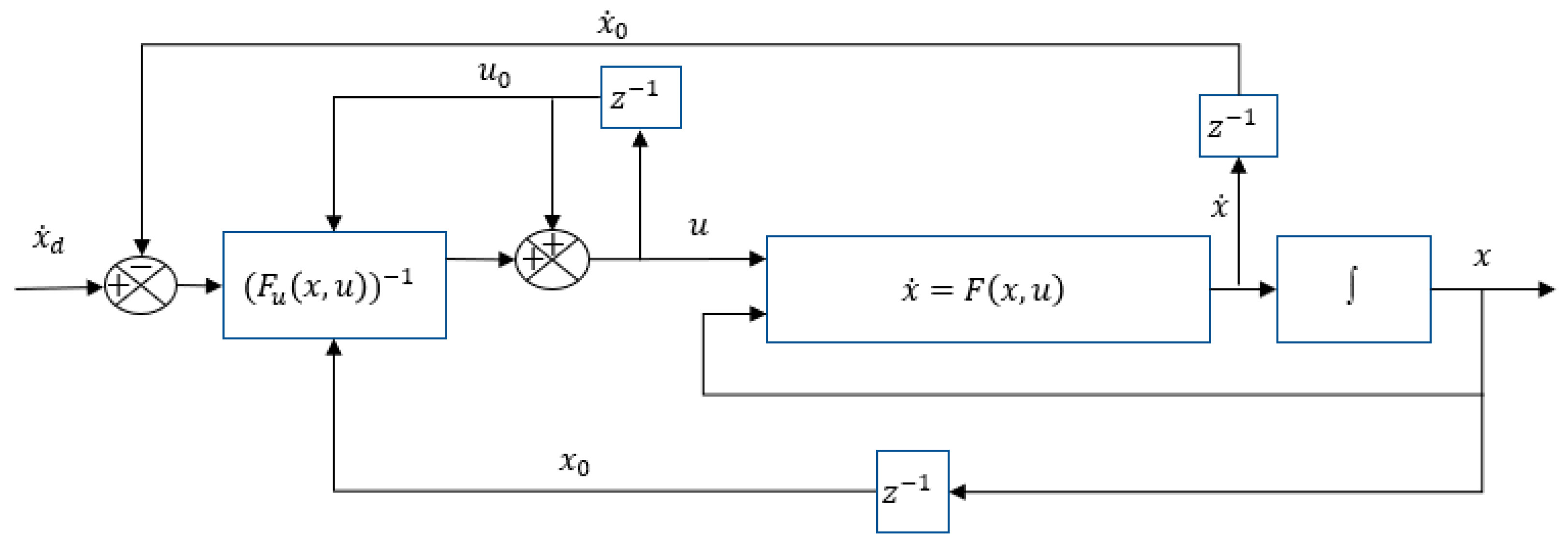
is not square, the pseudo inverse must be used to avoid any singularity of the controller. A block diagram of the proposed closed-loop system, as described by Equations (11)–(13), is presented in
Figure 4.
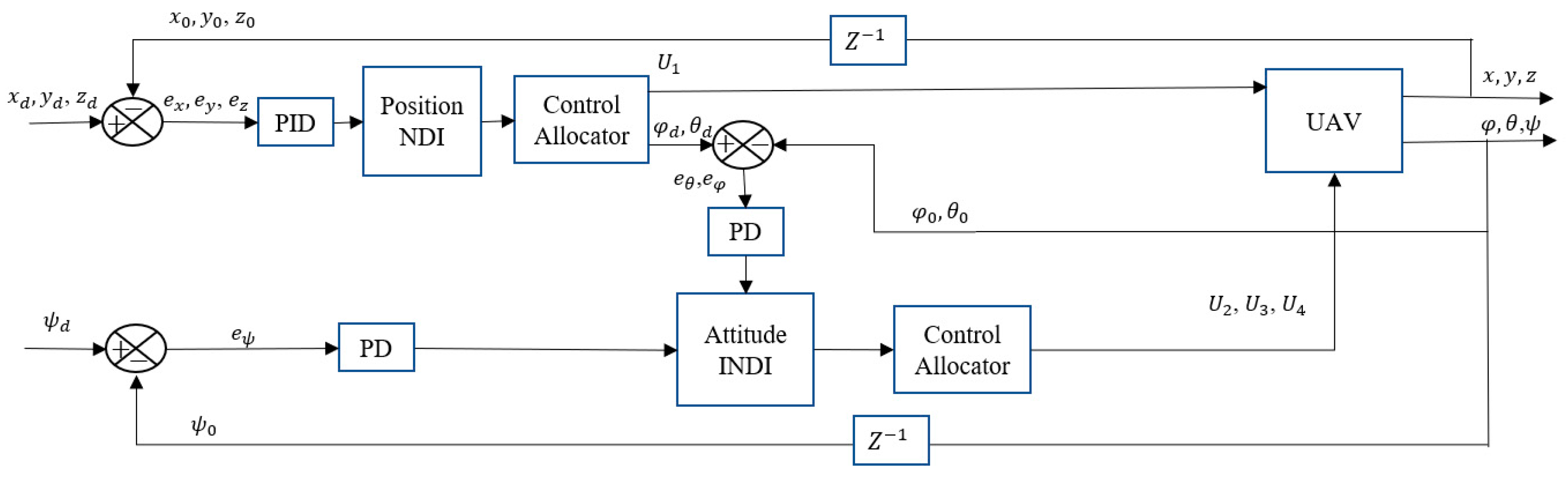
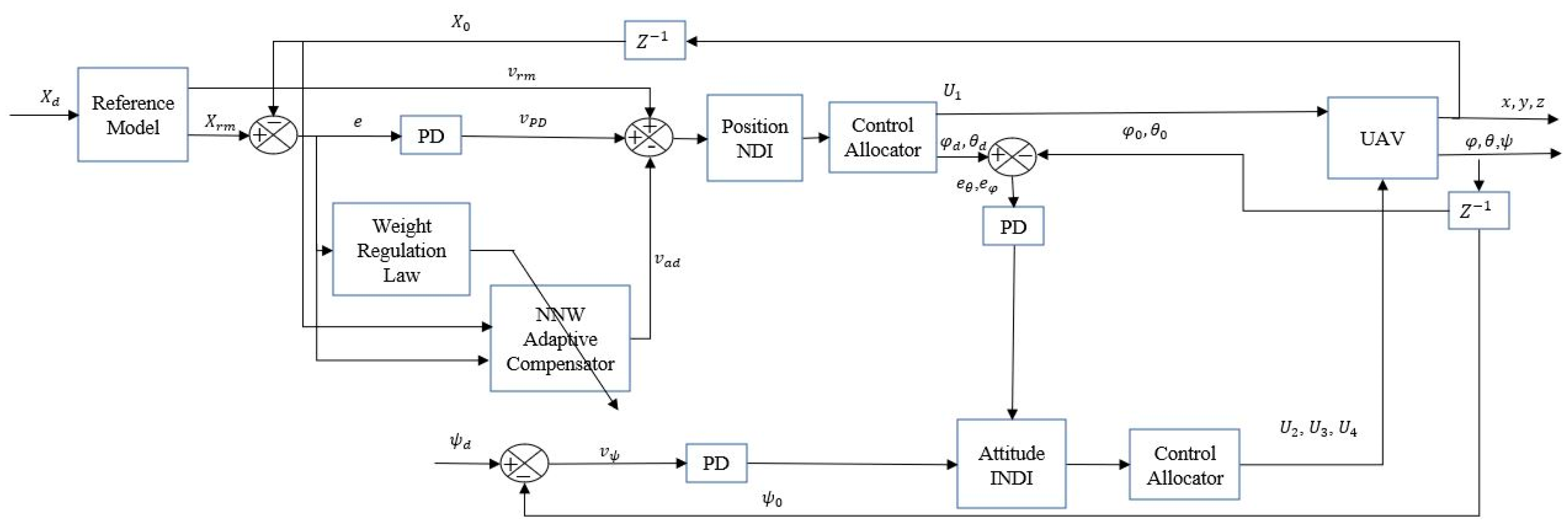
Due to the under-actuated kinematics and dynamics of the bi-copter as defined by its mathematical model (
Figure 1), the timescale separation principle must be applied, dividing the control law(s) into two loops: The outer loop (designed to control the translational degrees of freedom) provides input to the inner loop (designed to control the rotational degrees of freedom). This principle is used here to ensure that the dynamics of the inner loop are fast enough so that the vehicle’s rotational motion (i.e., attitude angles and rates of change of the rotation) required by the outer loop in its computation are readily available (assumed to be immediately achieved) when needed by the slow dynamics of the outer loop. To achieve this, a nonlinear controller that combines an NDI and an INDI controller is proposed (
Figure 5). The reason for this control selection is that both NDI and INDI control structures have a good ability to deal with highly coupled complex dynamic equations of the targeted UAVs and INDI provides the opportunity to use unknown/partially known dynamic equations of the aircraft in addition to being capable of dealing with other sources of uncertainties and disturbances.
Since the outer loop control has slow dynamics, an NDI controller is used for position control, while an INDI is used to control the aircraft’s angular rotation, , where faster and more complex dynamics are involved.
3.2. Attitude Controller
For the INDI attitude controller, the state of the drone is defined to include the Euler angles for roll, pitch, and yaw and the corresponding rotational speeds of the drone with respect to the aircraft’s body frame of reference (
p,
q,
r), as described by Equation (14).
where
and
. It should be noted that the mapping between
and
is defined by the corresponding transformation matrix. Since the control variables are the Euler angles, we can define
, and
as the output variables and later as the control variables per Equation (15).
Since the first-order time derivative of the control variable vector,
y, does not contain the control input vector,
u, as described in Equations (16) and (17), the direct relationship between the input and output variables was determined by executing the second-order derivative of the control variable vector:
It is then clear that the input explicitly appears in the obtained expression. From this formulation, it is then possible to deduce the INDI controller for the complete system by performing a Taylor expansion in the current time step,
t, as described in Equations (18) and (19). This expansion provides the linearized relationship between the control inputs and the Euler angles.
The linearization shown in Equation (19) assumes
to be the angular acceleration measurement taken at the previous time step,
t−1. With a very small sampling time and considering that the actuator dynamics are faster than the dynamics of the other system dynamics, it is possible to assume that
when compared to the changes of control output,
. When considering the high dynamics of the tiltrotor bi-copter, this assumption is quite bold. However, the dynamics of the tiltrotor bi-copter are highly dependent on the actuators’ dynamics. Even though one might think that the above-mentioned assumption (i.e.,
leading to the assumption that the variation between samples can be considered negligible, is restrictive, in practice, such conditions can be easily met as the state changes are negligible when compared to the typical fast actuator’s dynamics available in the market, under these conditions, a simplified expression that will be later used to obtain the control law can be expressed, as shown in Equation (20):
where matrix
is the derivative of the control inputs as shown in Equation (21).
Using Equation (20), as the control law, one can then obtain the input for the system by considering a simple relationship , where is the previous input, and solving Equation (22) to reach the control input The formulation can then be used to calculate the needed control input at each time step where, based on the previous assumptions, the system will not enter singularity points in the cases where K is not invertible (as the pseudo inverse can be computed in such cases, enabling the controller to pass such conditions).
The nonlinear controller obtained in this form is slightly less dependent on the system’s mathematical model, thus enabling it to effectively obtain the control input base on the angular acceleration measurements, which, otherwise, would be challenging to obtain. Even though the controller does not depend on part of the model, it is verifiable that the part of the controller that is neglected only slightly influences the bi-copter’s behavior. Therefore, disregarding the slower dynamics of the model when the controller is designed does not significantly affect the bi-copter’s behavior.
3.3. Position Controller
As described above, to control the position of the UAV, an NDI controller is used comprising the outer loop within the proposed controller (
Figure 5).
The proposed position controller follows a similar approach as the one developed for attitude control. The first control layer uses the INDI technique to cancel the nonlinearities associated with the linear dynamics of the system. Since, in the approach illustrated in
Figure 5, the outer loop is less dependent on the model uncertainty, NDI can be effectively used to design the corresponding position controller. The virtual control variables,
u, chosen for this controller are defined as per Equation (23).
Therefore, based on the equations presented in
Section 3.1, the first-order time derivative of
y for the NDI position controller is given per Equation (24).
Since an explicit dependence on
u was already found (i.e., Equation (22)), the linear relationship
can then be imposed when det
by selecting the control input vector,
u, have the form described by Equation (25).
As in
Section 3.2, it is common to use a PID controller to improve the response of the system. For this, however, there is a need to obtain the optimized values of the PID gains. To obtain such gains in the scope of the multi-objective goal for the bi-copter UAV, a non-dominated sorting algorithm, NSGA-II, is used (described in
Section 4).
The NDI outer loop controls the slow dynamics and generates the state command to the inner INDI block following Equations (26)–(28), as is shown in
Figure 5.
6. Conclusions
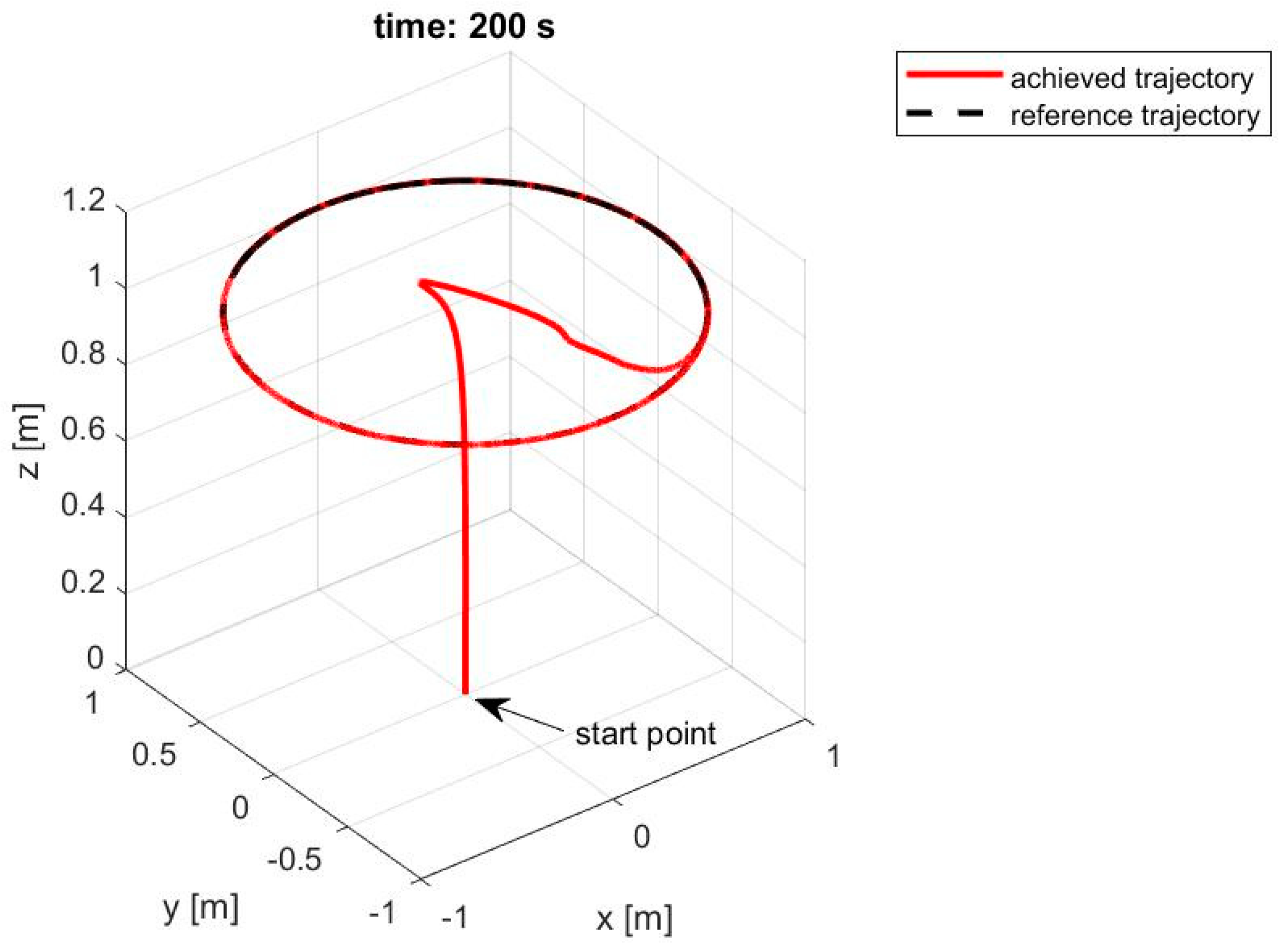
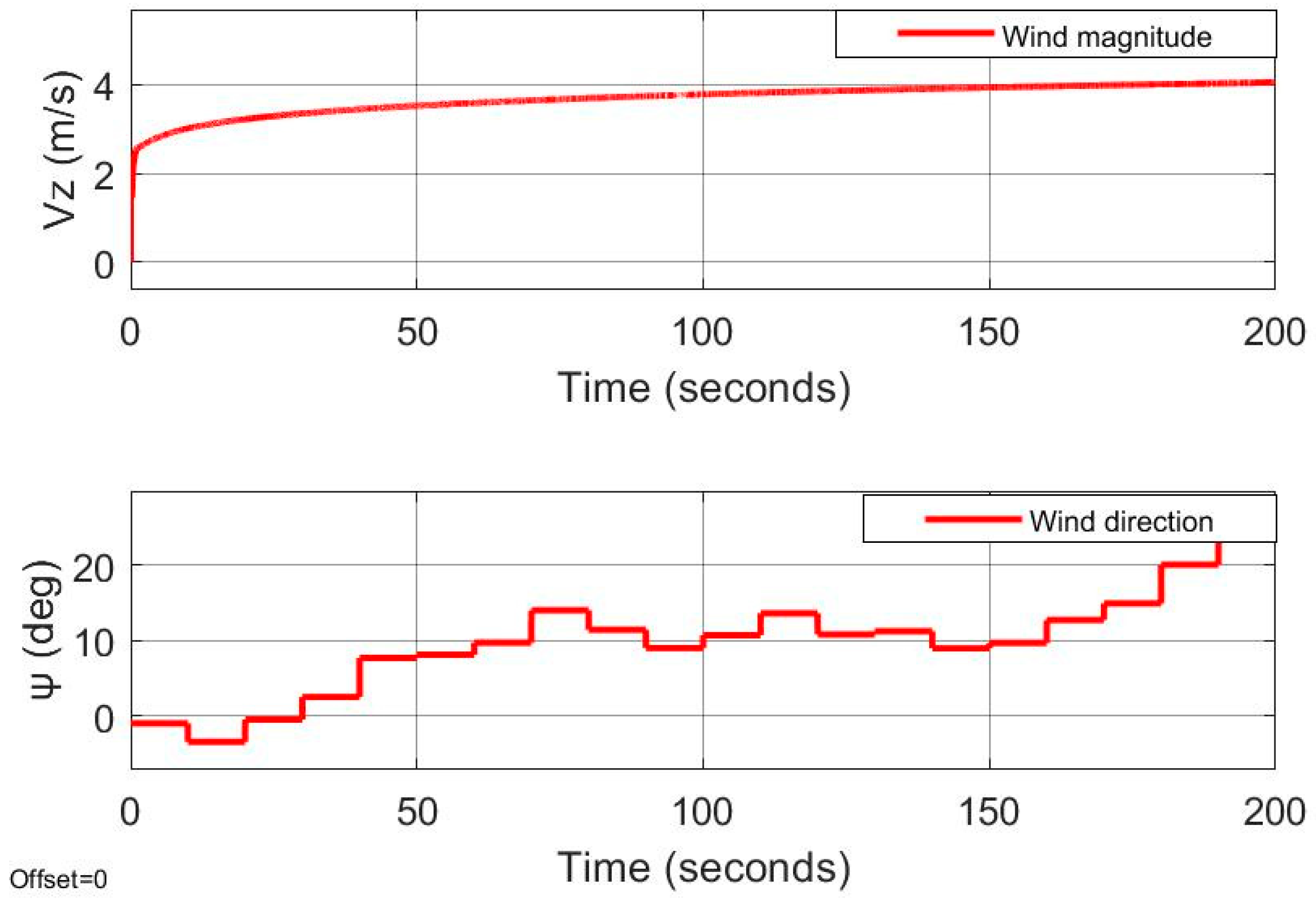
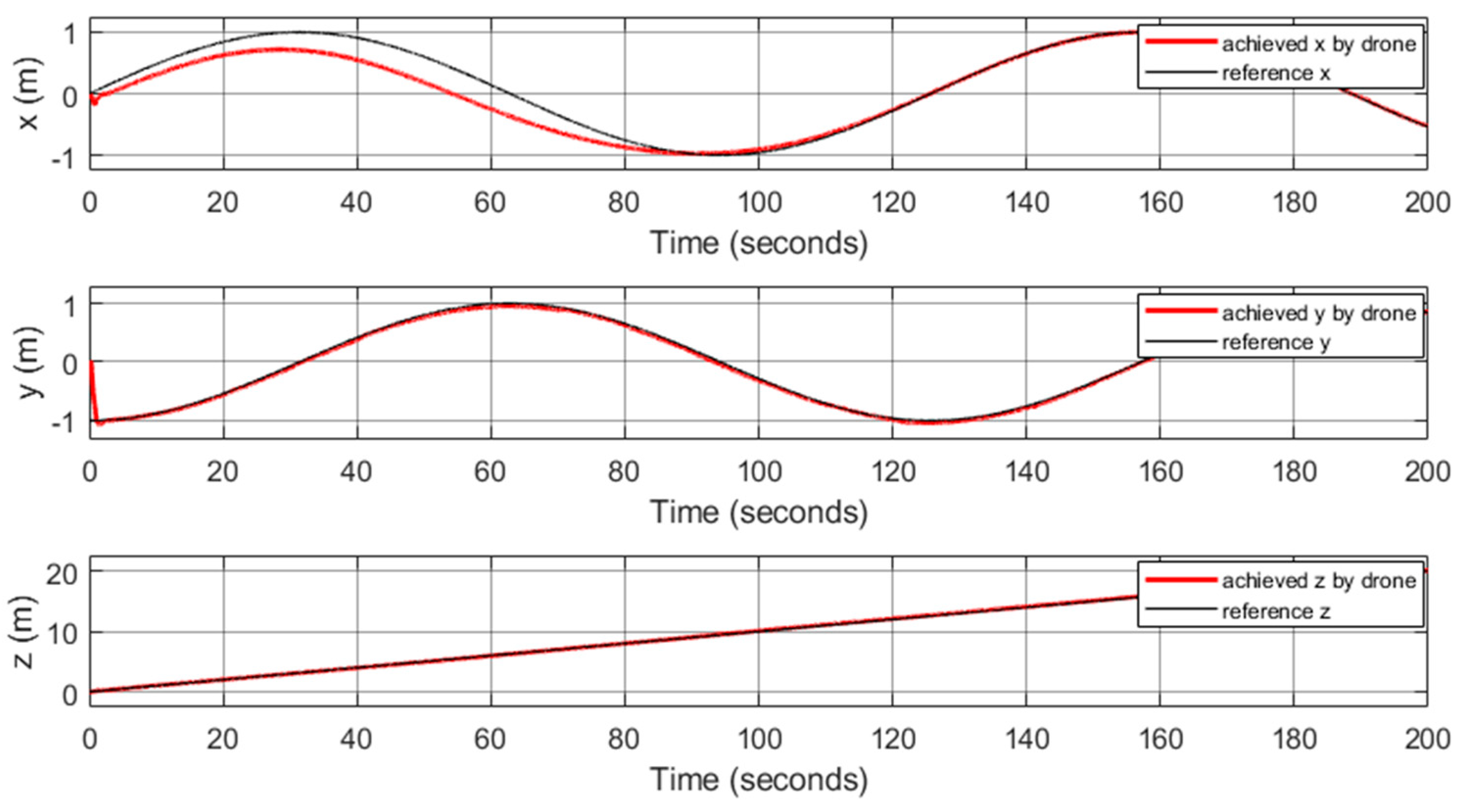
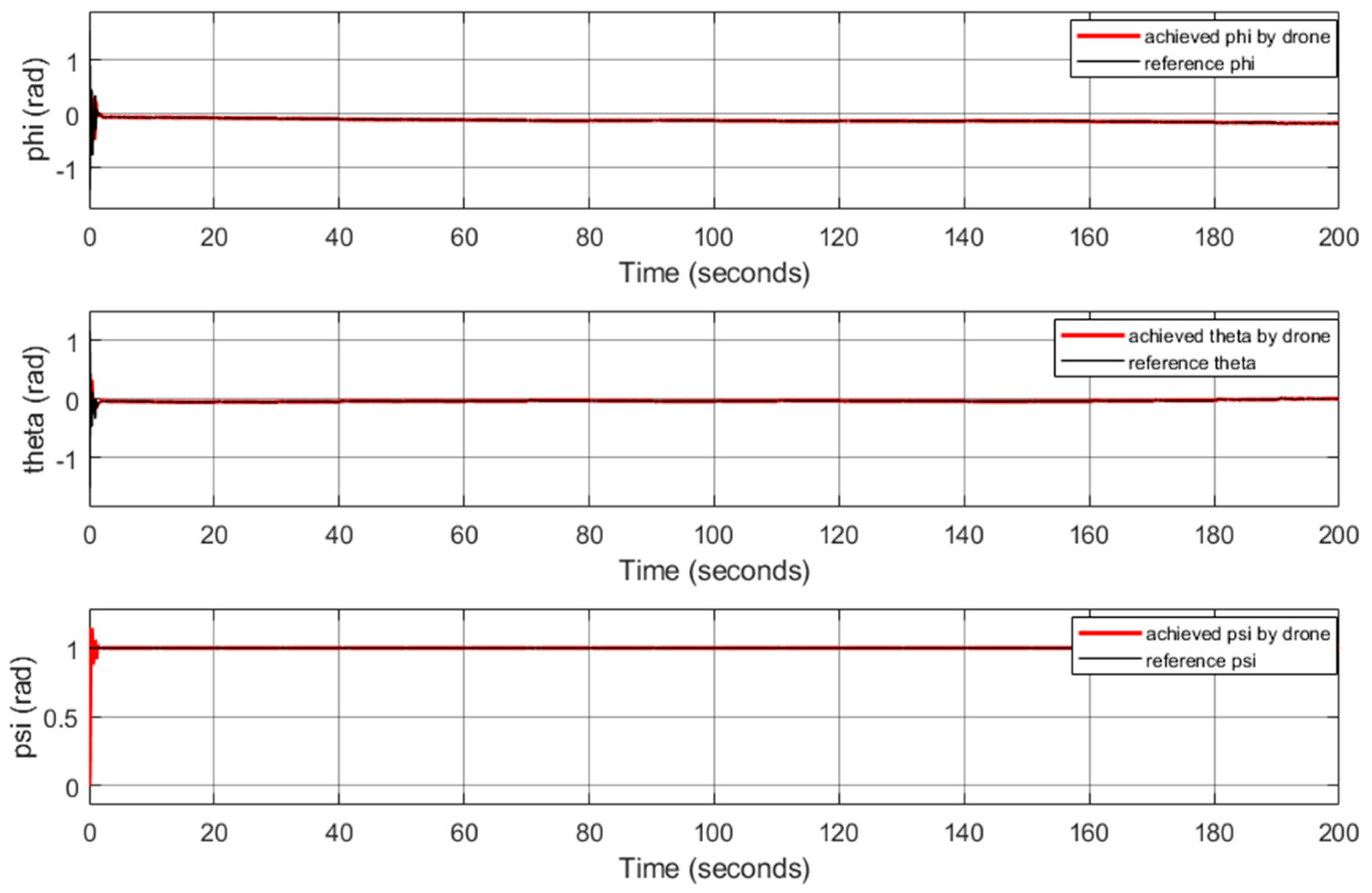
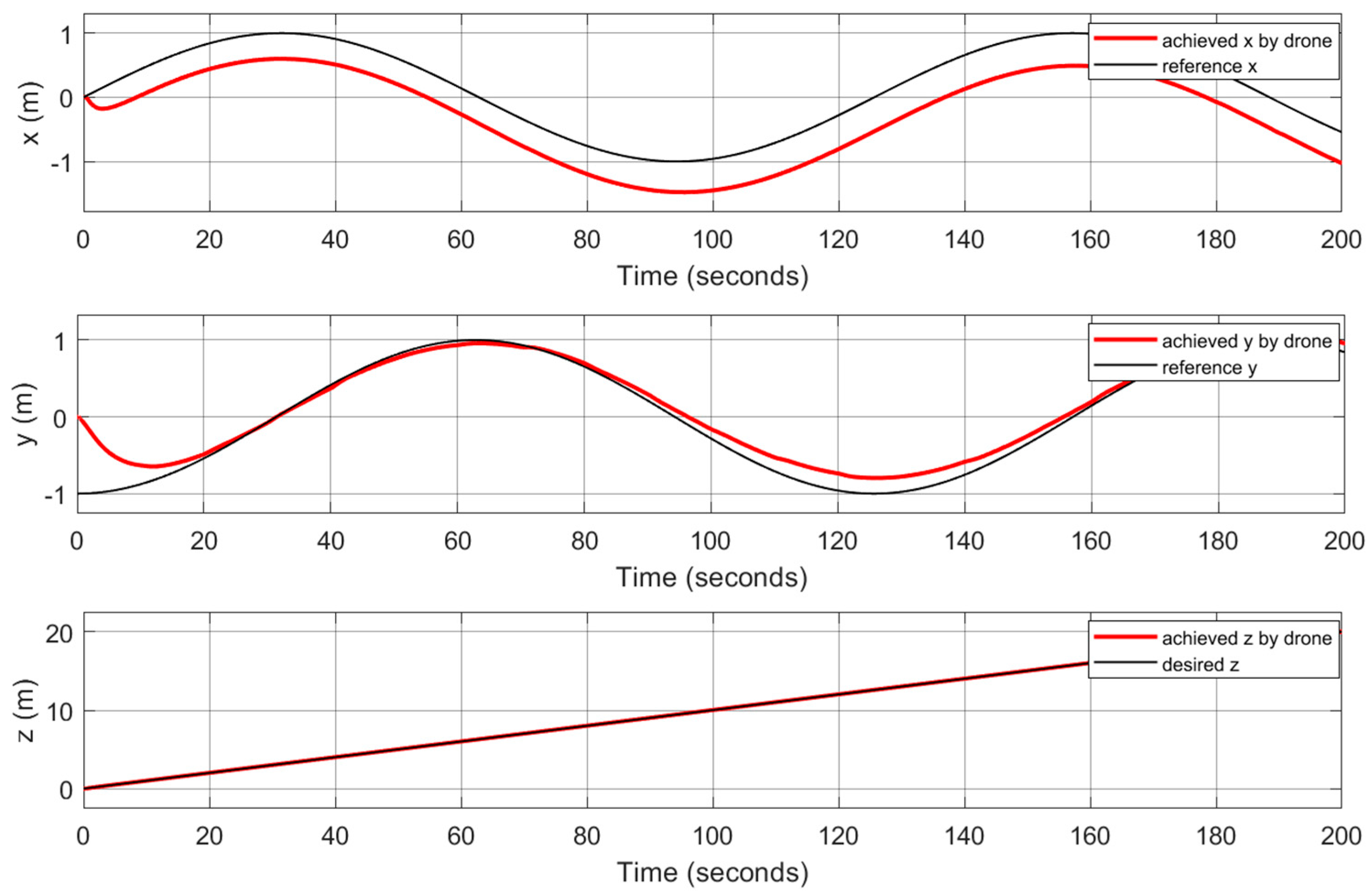
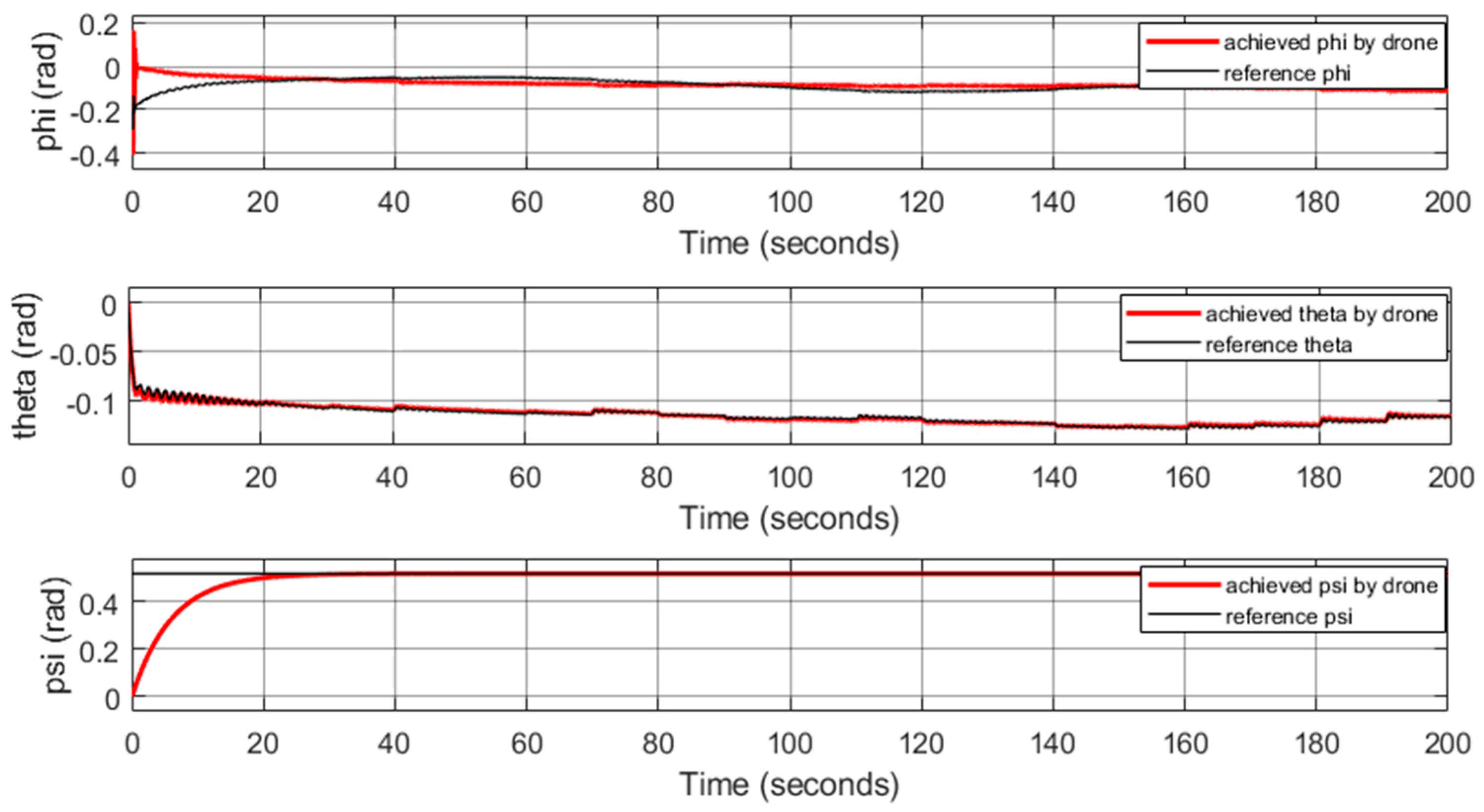
In this paper, a nonlinear mathematical model for a tiltrotor bi-copter UAV prototype is extracted. Then, a nonlinear trajectory controller based on nonlinear dynamic inversion, including an outer NDI loop controller for position and an inner INDI loop controller for orientation is proposed. The proposed control architecture is improved with the introduction of the NSGA-II-PID controller. Due to the significant cost in time and effort required to repetitively perform manual tuning of the linear gains using typical control tunning approaches, in this paper, a multi-objective-gain optimization process based on the NSGA-II algorithm is used to minimize the two error functions. By combining these two controllers with a multi-objective optimization process, faster and more accurate flight control is achieved. The proposed controller does not require a complete and accurate dynamic model of the system. The performance of the control system was tested over diverse flight paths, including flight tests under moderate wind gusts.
The obtained results of the proposed controller, implementing gain matrix k = [10.6, 0, 13.9, 5.8, 0, 8.8, 10.8, 0, 13.0, 4.3, 0, 3.6, 6, 0, 3.5, 8.4, 0, 8] for the PID control blocks, were compared with results obtained using a previously designed backstepping controller, using a gain matrix α equal to α = [15, 0.1, 15, 0.1, 15, 0.1, 20, 1, 2, 1, 1, 1]. From the obtained results, it is concluded that the proposed control system design performs better than previously developed controllers (e.g., the backstepping controller, which requires accurate equations of motion) and provides better results than the classic dynamic inversion type of controllers presented in the available literature. These results are anticipated to be very helpful for the development of a new concept of bi-copter aircraft using diverse mechanisms, including variable pitch propeller systems and other architectures that will enable such eVTOL aircraft to perform missions in civil and military applications and overcome aggressive disturbances where current UAV systems cannot be used.
As described in this paper, the proposed method is an offline method. However, it could be used online if the needed time window for optimization is calculated and guaranteed prior to the actual flight.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}