1. Introduction
Patients with neurological and muscular diseases cannot move their limbs due to poor sensory and motor skills [
1]. According to the report, the only treatment available for disabled people is
repetitious physiotherapy. Experts recommend that regular movement-based training may assist in reactivating impaired sensory function and increasing their efficiency and dependability in performing daily tasks. Robotic therapy is considered to be well suited for the purpose of improving patient recovery rates [
2]. Several robotic treatment devices have been developed to help with upper-extremity rehabilitation [
3,
4,
5,
6,
7]. Only a few of these prototypes have been marketed as a result of their limitations, as detailed below.
In recent studies [
8,
9,
10,
11], it has been recommended that rehabilitation programs target specific muscles and ligaments with more intense and regulated activities. Rather than recreating a whole human workspace, splitting the workspace is the best option. Rehabilitation firms are increasingly using rehab devices for upper extremity recovery because they can execute a greater number of therapeutically helpful movements in a smaller area. Task-based studies have been employed by researchers to develop upper-limb robotic rehabilitation devices that concentrate largely on activities in daily living (ADL), even though the range of motion (ROM) is the first step before gaining independence in ADL [
12,
13]. Mismatched rotational axes, high power to weight ratio, kinematic compatibility difficulties, and non-repetitive inverse solution may all result from serial connections in ADL-based manipulators with several degrees-of-freedom (dof) [
6,
14,
15]. On the other hand, researchers seek medically relevant motions with greater manipulability and positional reachability. The field lacks the contributions in task-oriented design for synthesizing robotic assistance with the lowest possible active dof. Second, serially linked connections are usually used to achieve high manipulability, but parallel manipulators are used to achieve greater positional reachability [
16,
17,
18,
19,
20]. This concept inspired the use of hybrid configurations in this work. The shifting instantaneous center gives the flexibility required to address misalignment and kinematic compatibility. Thus, an adequate hybrid configuration for simulating natural human motion is required.
This research focuses on a novel strategy utilizing a hybrid configuration to construct a 2-dof task-based rehabilitation device for the recovery of shoulder and elbow flexion/extension movement while preventing joint misalignment and enhancing user comfort as well as avoiding a large number of active dof. This is accomplished by incorporating the characteristics of a double-four bar mechanism and by performing dimensional synthesis.
Major aspects addressed in this paper in order to synthesize the architecture for rehabilitation aid proposed are as follows:
Task-based synthesis is used to design a customized upper-limb rehabilitation device with a minimal number of active dof capable of acquiring therapeutically desirable movements (ROM exercises).
Designing and evaluating an optimal double four-bar configuration to mimic natural human motion and minimize misalignment and singularity concerns is offered.
2. Kinematic Compatibility
A major limitation of the usability of exoskeleton is its kinematic incompatibility with the wearer. This occurs due to mismatches of the centers of rotation of the wearers joints with those of the corresponding exoskeleton joints. Human–robot compatibility majorly consists of the following steps:
Match number of dof between the robotic system and the wearer [
21];
Minimize variation of instantaneous center of rotation between the robot and wearer [
21];
Identify coupling relationship between robot and the wearer [
6,
22].
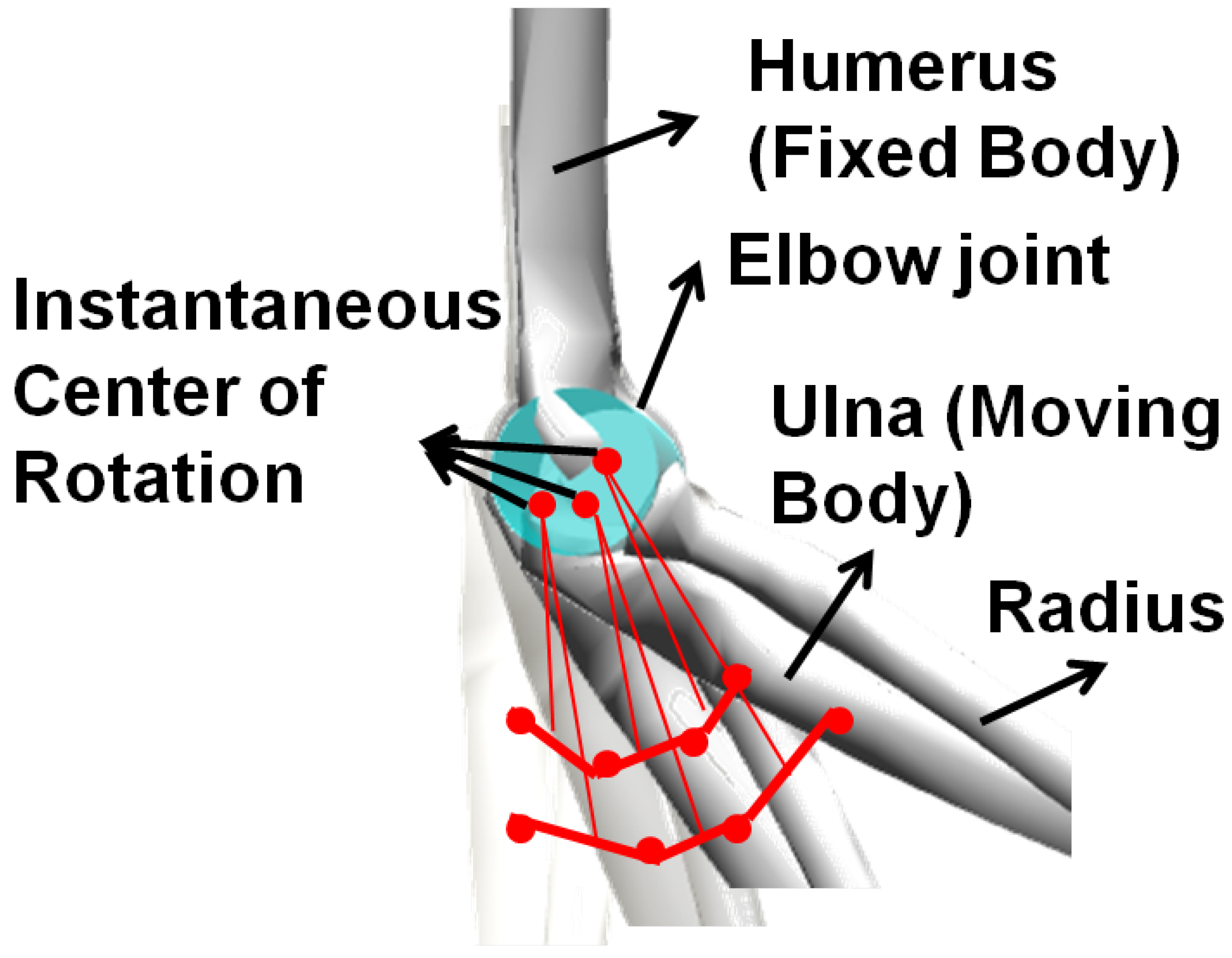
Elbow joint rotation is a multi-axis joint rotation, i.e., the instantaneous center of rotation of elbow axis varies with the elbow flexion–extension movement. It is reported that, normally, 2.5 mm × 7.8 mm is the cross-sectional area of the instantaneous center of elbow joint at lateral view (sagittal plane) [
23,
24]. Elvire et al. [
24] reported in their paper that the center of rotation of the elbow is
14 mm at distal,
mm at lateral and
mm at the anterior to medial epicondyle.
Figure 1 shows the varying instantaneous center position with respect to the elbow flexion–extension motion. During the motion, the humerus is fixed and the ulna moves with respect to its varying instantaneous center.
Figure 2 depicts the integration of a conceptual planar exoskeleton with the wearer. It represents the generation of residual forces in 2 active dofs anthropometric exoskeleton during the elbow flexion/extension motion.
Figure 2 represents the effects of variation of instantaneous center on the harness position. The exoskeleton end-effector (
P) tries to compensate with the created linear (
) and angular (
) displacement, but the harness and less flexibility in design is restricted for it. Thus the mechanism which has a single-axis revolute joint at the biological joint generates residual forces at the end-effector and may become uncomfortable to the wearer.
Figure 2 illustrates a closed loop formed by an exoskeleton and a human limb. It is important to compute the number of dof for a closed-loop chain, and that can be represented as Equation (
1).
Here,
F represents the dof of the multi-loop chain (closed loop formed by exoskeleton and human arm),
denotes the
ith joint,
m indicates number of joints,
l denotes the number of separate loops, and
d represents the function of motion space in a closed loop (for planar
and for spacial
). Equation (
1) can be rearranged as
Here,
and
represent the total known dof (active dof) and total unknown dof (passive dof), respectively. Thus, for 2-dof planar exoskeleton as shown in
Figure 2, the closed loop consists of dof of the multi-loop chain,
F is 2; total known dof (active dof)
is 4; function of motion space
d is 3; and the number of separate loops
l is 1. Therefore, the total unknown dof (passive dof)
is computed by Equation (
2) as
This proposed passive actuator can be revolute or prismatic. However, based upon the desired demand, i.e., the actuator should be capable of compensating linear and angular displacement which are generated during the misalignment compensation as shown in
Figure 2. A single revolute passive joint may create an issue. As shown in
Figure 3,
A is attached to the revolute passive joint and may hurt the human. However, it is discussed earlier that as the biological elbow has a multi-axis joint, the exoskeleton should also have multi-joint movement. Therefore, the closed-loop concepts are introduced in the exoskeleton mechanism and consider its characteristics during the exoskeleton configuration selection. Equation (
3) provides two active dof. The work selected a hybrid configuration with 2-dof, i.e., a four-bar loop connected to another four-bar loop with a common bar.
Figure 4 shows the two separate four bar loops and their combination. Point,
P is the end effector of the exoskeleton and is capable of moving along with varying ICs (instantaneous centers). The two conditions of the attachment of a double-four bar exoskeleton with the human limb, i.e., non-anthropomorphic (end-effector) and anthropomorphic types, are demonstrated in the paper.
4. Results and Discussion
To demonstrate the proposed task-based dimensional synthesis algorithm, MATLAB R2015a is run on an Intel(R)Xeon(R)CPU E5-1607 v2 @ 3.00 GHz 3.00 GHz CPU equipped with 12 GB RAM. The average time to compute the results is 20 h. The formulated problem in
Section 3.3 provides a method for synthesizing the double four-bar configuration optimally for the given task. To demonstrate the utility of the problem formulation, the wrist locations related to the shoulder as a reference frame, as given in
Table 1, must be traced through the configuration.
4.1. Case-I: Towards Minimizing Conditioning Index Only
For initial analysis, using anthropomorphic human upper-limb data, the lower and upper bounds for link lengths are set to
m and
m, respectively, while joint angles are set to
and
, respectively. The formulated problem with double four-bar configuration connected in series represented the mechanism with link lengths
,
, …,
. However, lifting the right hand is considered the task and the task-space locations (TSLs) are represented as
,
, …,
(refer to
Table 1). The optimal link lengths are obtained as
,
,
,
,
,
and
m, respectively. The results that were accomplished while reducing the conditioning index, manipulability, and torque for both active angles corresponding to the reachability at each TSL are illustrated in
Table 2. This table focuses on the double-four-bar arrangement that is connected in series. The range of the conditioning index is between
and
, the range of manipulability is
to
for the specified TSLs. The best postures are evaluated from
to
TSLs.
Table 2 also includes the rated torque values required for both active actuators of the mechanism, which are determined to be between −4 N-m and −1.5 N-m for actuator-1 and between −8.3 N-m and
N-m for actuator-2. A negative toque implies rotation in the clockwise direction.
4.2. Case-II: Toward Ergonomically and Aesthetically Compatible with Human-Limb Modified Design Limits and Introduce Joint Angle Continuity
The findings of case I are further worked upon in terms of making the results more compatible and ergonomically and aesthetically pleasing. This is accomplished by making certain modifications to the design restrictions and adding a new target aimed at joint angle continuity. The modified design constraints based on anthropomorphic data specify lower and upper limit restrictions for connection lengths, as shown in
Table 3. Both rows indicate the minimum and maximum values for each connection length from
to
.
The joint angles are set as 0.01 and 360 degrees, respectively. Furthermore, in this iteration, the continuity of the joint angles is included as another objective as well as being shown in Equation (
12).
Thus, the nature of the problem is modified, and mutiGA is applied. The revised optimal link lengths are
,
,
,
,
,
and
m, respectively.
Table 4 shows the results obtained through the minimizing of joint angle movement. It is obtained that the modified problem synthesized the configuration with improved Jacobian performance.
4.3. Case-III: Introduce Elbow Mapping Condition
The condition, elbow mapping, denotes the mapping of the mechanism’s coupler position to the human elbow position. The corresponding condition’s mathematical equation is as follows:
Elbow mapping .
Here, , represents coupler position, = 1 to n and , represents elbow position.
In this study, the obtained optimal link lengths are
,
,
,
,
,
and
m, respectively.
Table 5 displays the results acquired in the process of introducing the elbow mapping condition. However, it is noticed that the Jacobian conditioning indices acquired for each TSL are not as excellent as those in case II, but the misalignment problem is mitigated in case III.
4.4. Comparison
A comparison analysis of all three instances has been shown in
Table 6, and it has been discovered that case II has a remarkably higher kinematic conditioning index and manipulability. Despite the fact that case III has the greatest minimum and maximum values of the conditioning index and manipulability, it also has the most variation and variance, and the lowest reachability. As a result, case II is shown to be more appropriate for the given task, as well as having superior kinematic performance and repeatability.
5. Validation
MATLAB software is used to plot the instantaneous center of obtained optimal double four-bar configuration and the elbow positions.
Figure 6 shows the dimensions obtained by varying the instantaneous center of a double four-bar configuration, approximately −15 cm to 10 cm in the
Y-direction, and −18 cm to 10 cm in the
X-direction during task completion, are graphically matched with the cross-sectional area (25 cm × 28 cm) due to change in the elbow end positions, approximately −39 cm to −11 cm in the
Y-direction and 5 cm to 30 cm in the
X-direction. This represents the closeness of changing patterns. The MATLAB plot validates that the area involved during motion between double four-bar configuration’s instantaneous center with elbow positions are identical, which lies under the reported value of the cross-sectional area of the instantaneous center of elbow joint at the lateral view (sagittal plane) [
23,
24].
The prototype of the designed configuration coupled with human limb is fabricated as shown in
Figure 7, which shows the task performance while staying comfortable in movement, i.e., with least misalignment.
Simulink’s MATLAB toolbox is used to calculate the force experience at the human wrist as shown in
Figure 8. The
simscape model and graph are shown in
Figure 9 to reflect the force acting at the end-effector of the wrist. Force is measured in dynes (CGS system). An
X-
Y-
Z force diagram is shown in the graph with blue lines, yellow lines, and an orange line, respectively. The constraint force lies in between
N in the
X-direction,
N in the
Y-direction, and 0 N in the
Z-direction.Therefore, the obtained wrist mobility force is within the acceptable tolerable force range (1 N).
6. Conclusions
The purpose of this research is to discuss the development of a rehabilitative exercise-based hybrid exoskeleton that avoids misalignment difficulties while replicating natural human mobility. This is achieved by the use of a double four-bar configuration. The kinematic modeling of this double four-bar system is formulated, which is further used for the optimal dimensional synthesis. Three optimal problem formulations are detailed to develop an exoskeleton for individuals that has good kinematic performance, and is ergonomically sound and visually appealing. The major aspects are design limitations, joint angle continuity, and emulating natural human motion. No acceptable solution is found in case III, which involves aligning the elbow joint’s motion, whereas case II is adequate for the desired work and under acceptable conditions. When the instantaneous center of the four-bar design is measured, it is compared with normal human elbow locations in order to verify the results obtained. Both regions are found to be identical. Finally, the constraint force felt at the wrist is estimated with the MATLAB Simulink software, and the wrist’s mobility comfort with an acceptable force, owing to coupling, is proven.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








