
Wilderness Search for Lost Persons Using a Multimodal Aerial-Terrestrial Robot Team



Abstract
:1. Introduction
1.1. Influence of Trails on Lost Person Behaviour
1.2. Heterogeneous UAV-UGV Teams in WiSAR
1.3. Multimodal Path Planning
1.4. Contribution
2. The Search Problem
2.1. Assumptions
2.1.1. The Target
2.1.2. The Search Agents
2.1.3. Search Planning
- The target is in a specific area being searched. The probability of this event is known as probability of area (PoA) and it depends on the target’s motion, which is estimated by a target motion model; and,
- A searcher can detect the target, given that the target is in the area searched. The probability of this event is known as probability of detection (PoD) and it depends on how the plan utilizes search resources in the area.
2.2. Background
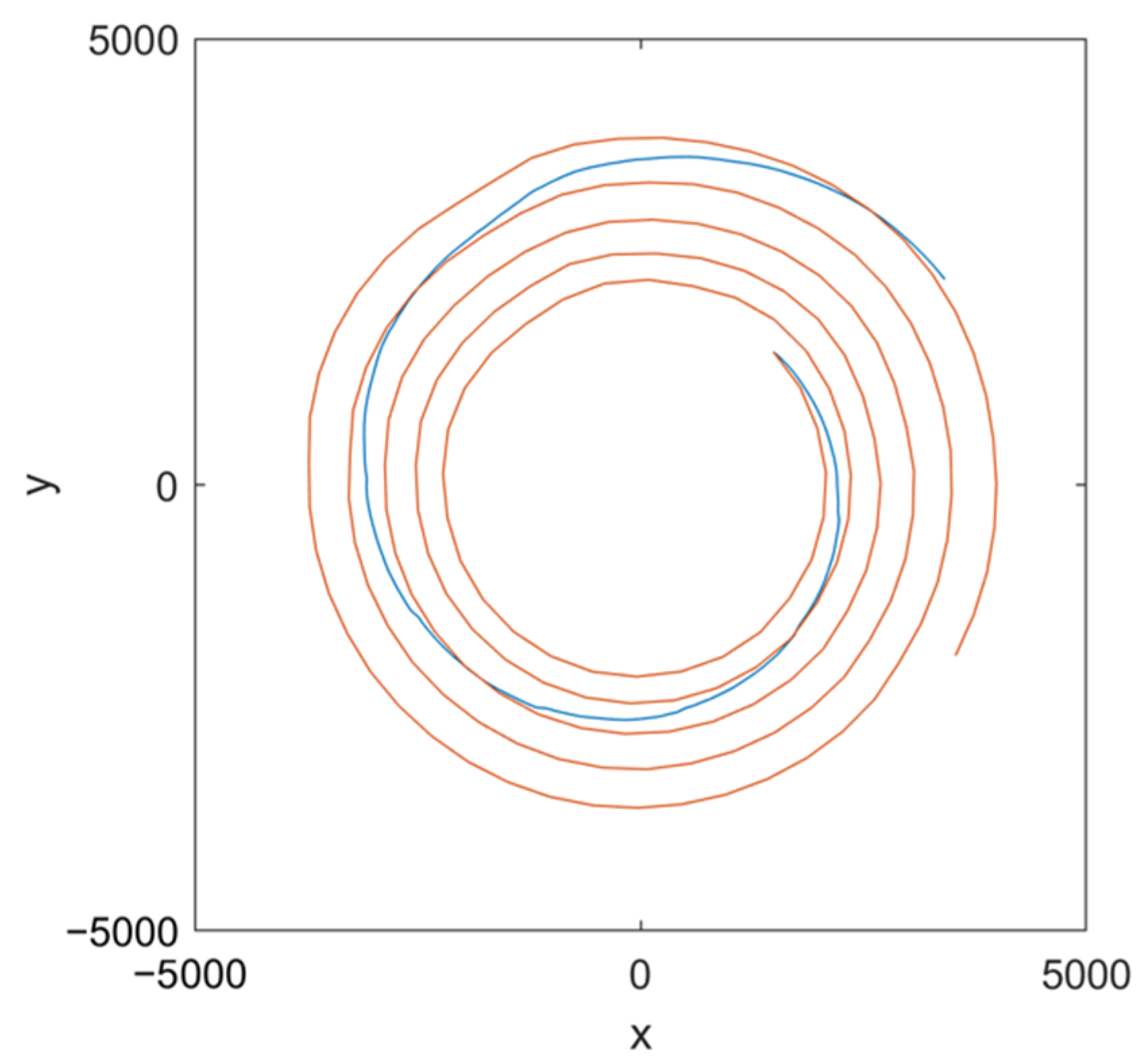
2.2.1. Iso-Probability Curves
2.2.2. Monte Carlo Tree Search
3. Proposed Method
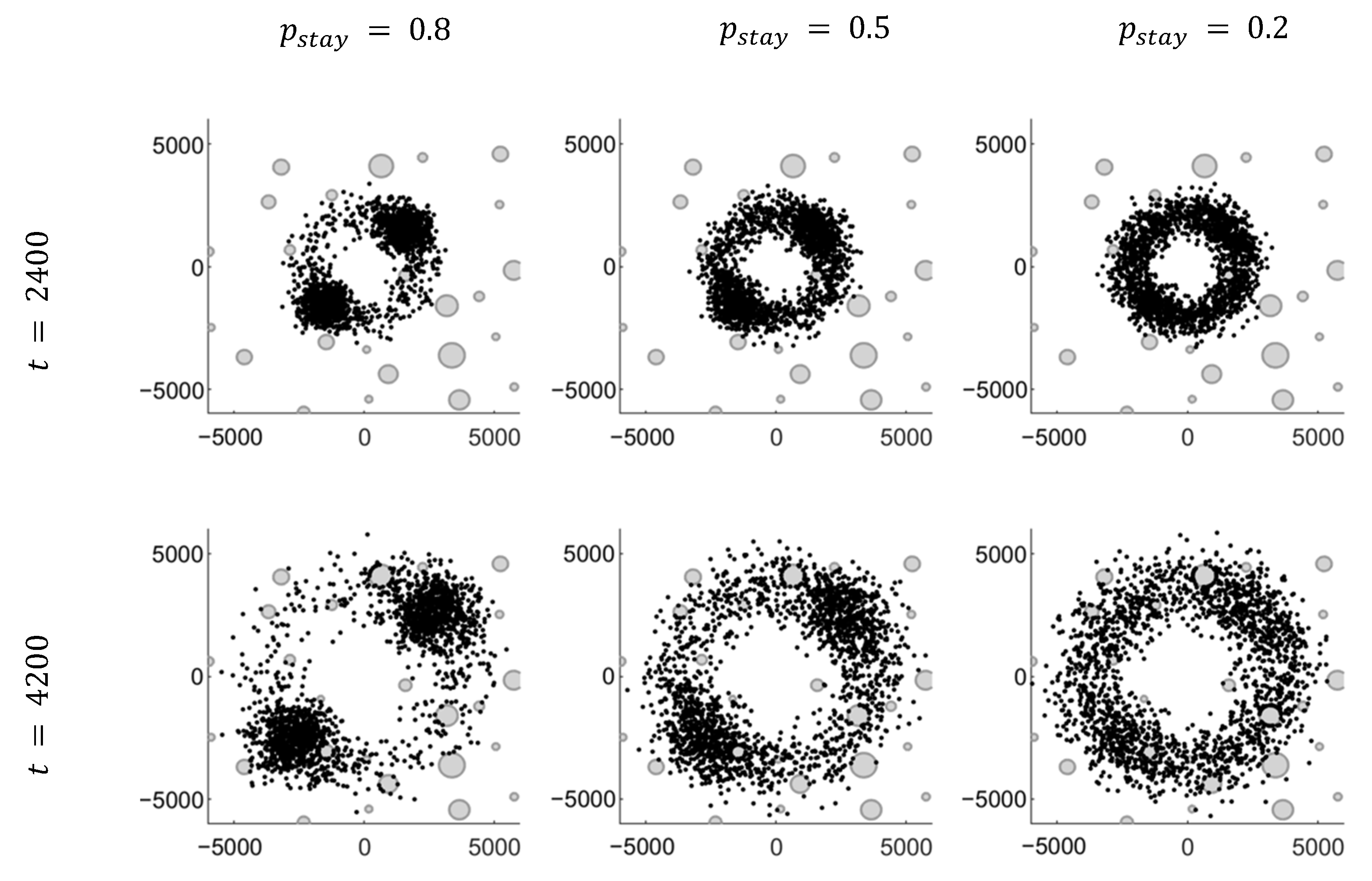
3.1. Target-Motion Prediction
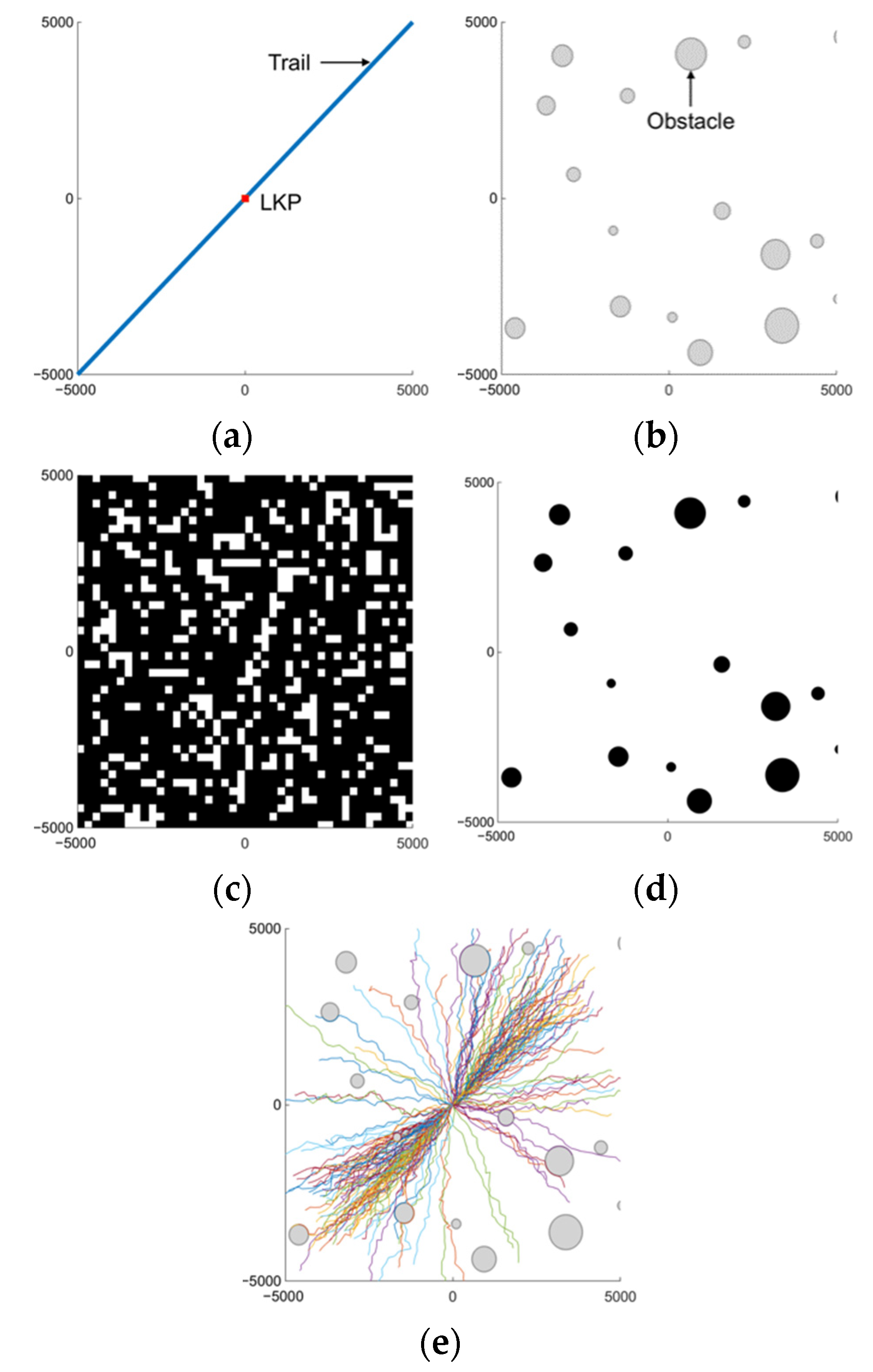
3.1.1. Target Motion Modelling in an Environment with Trails
- 1.
- The length of the next segment, , where the lengths are uniformly distributed between 0 and :and,
- 2.
- The heading of the next segment, where
- a.
- For a target that is on-trail, its decision on whether it will depart from the trail at a decision point is modelled as a Bernoulli trial with a probability of staying on-trail being :If the target decides to stay on trail (i.e., ), the next heading will continue to be aligned with the trail. If the target decides to leave the trail (i.e., ), the next heading will be selected from the following distribution:where is the target’s angular position in a polar coordinate system centered at the LKP. This heading distribution models the target’s tendency to start wandering away from the LKP after deciding to stop following the trail. The p/4 range includes all headings with a radial component larger than the tangential component, which would move the target radially away from LKP while limiting travel in the tangential direction.
- b.
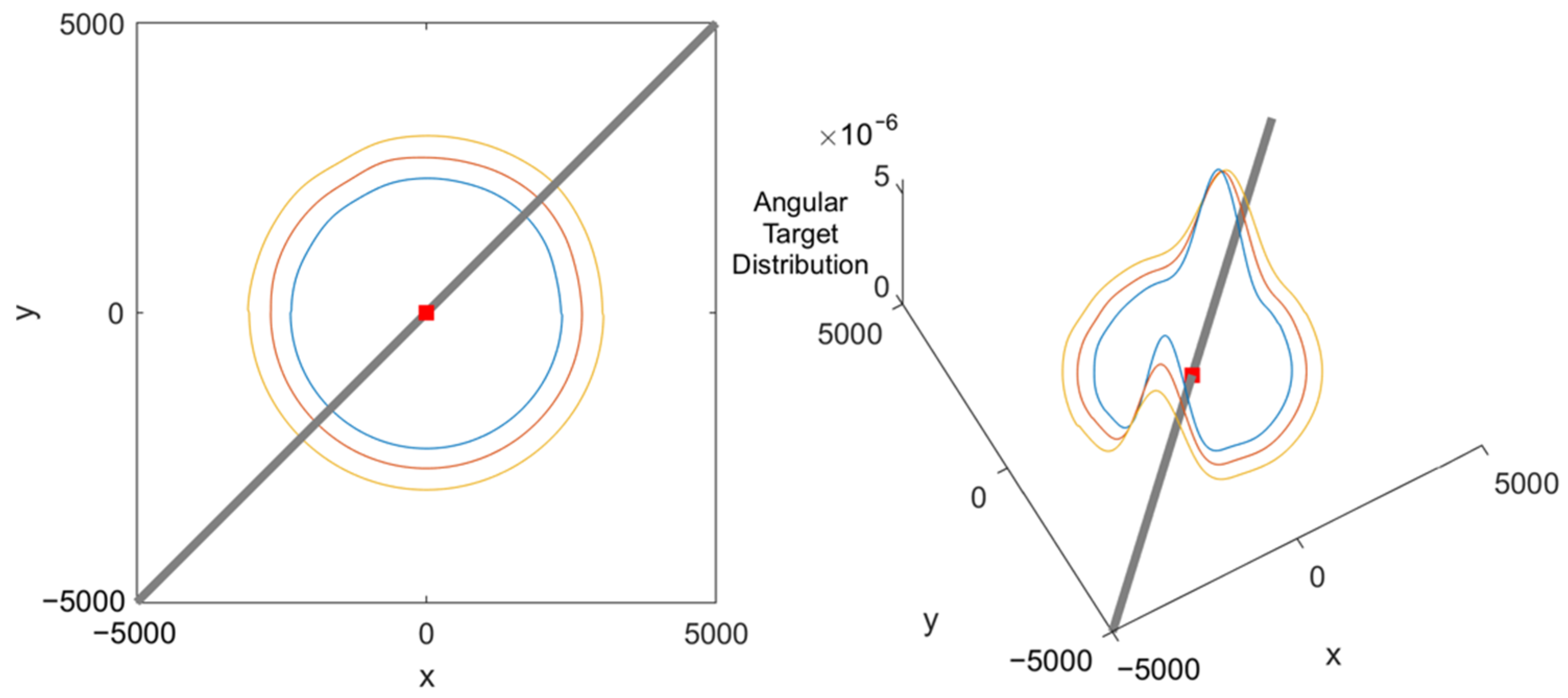
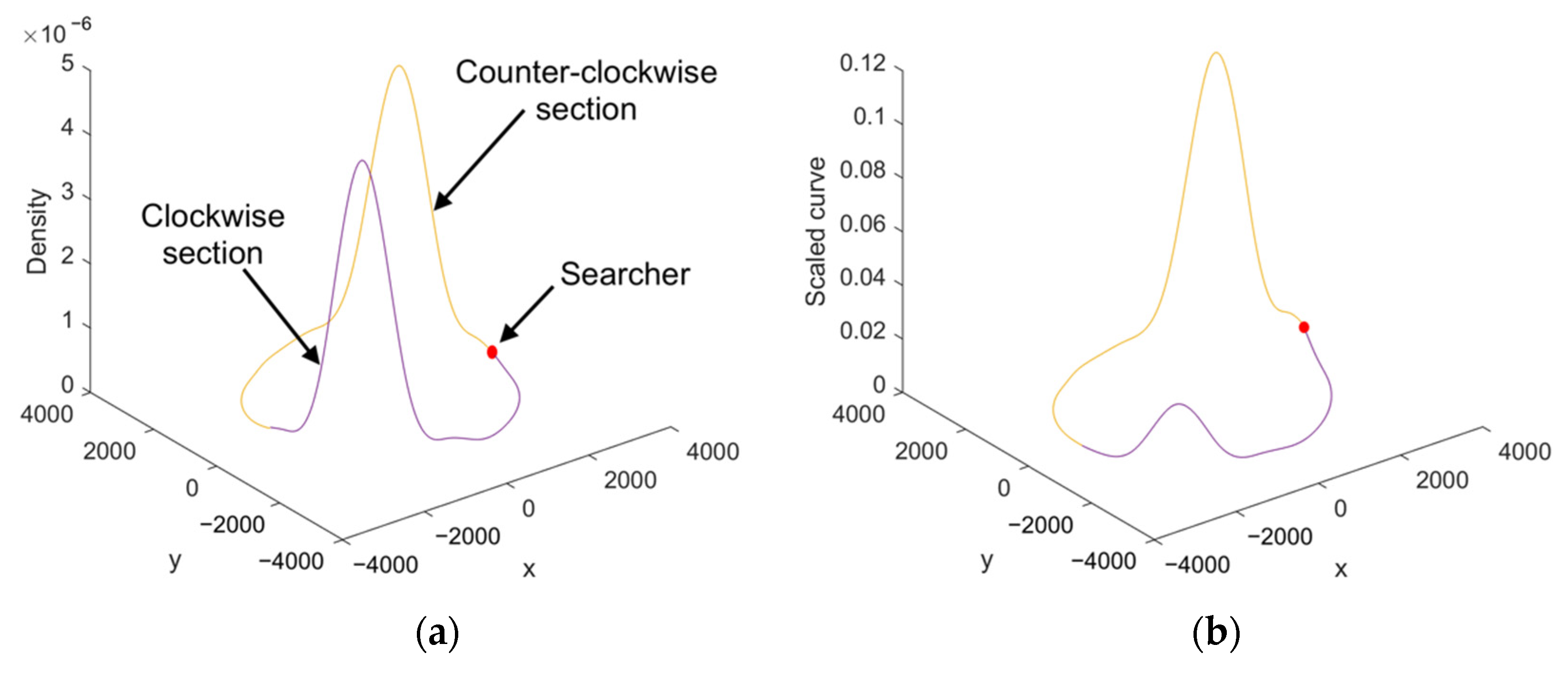
3.1.2. 3D Iso-Probability Curves
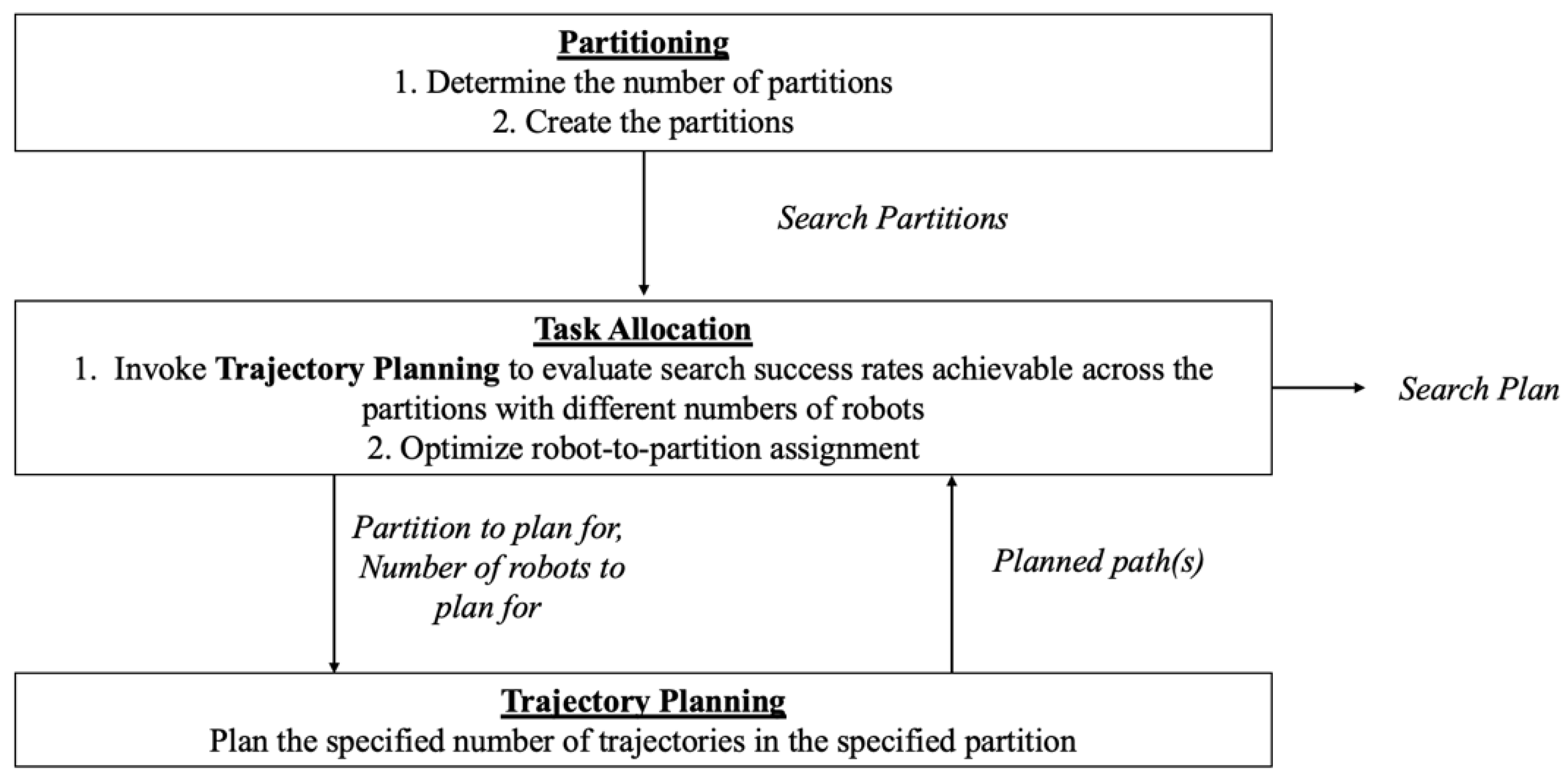
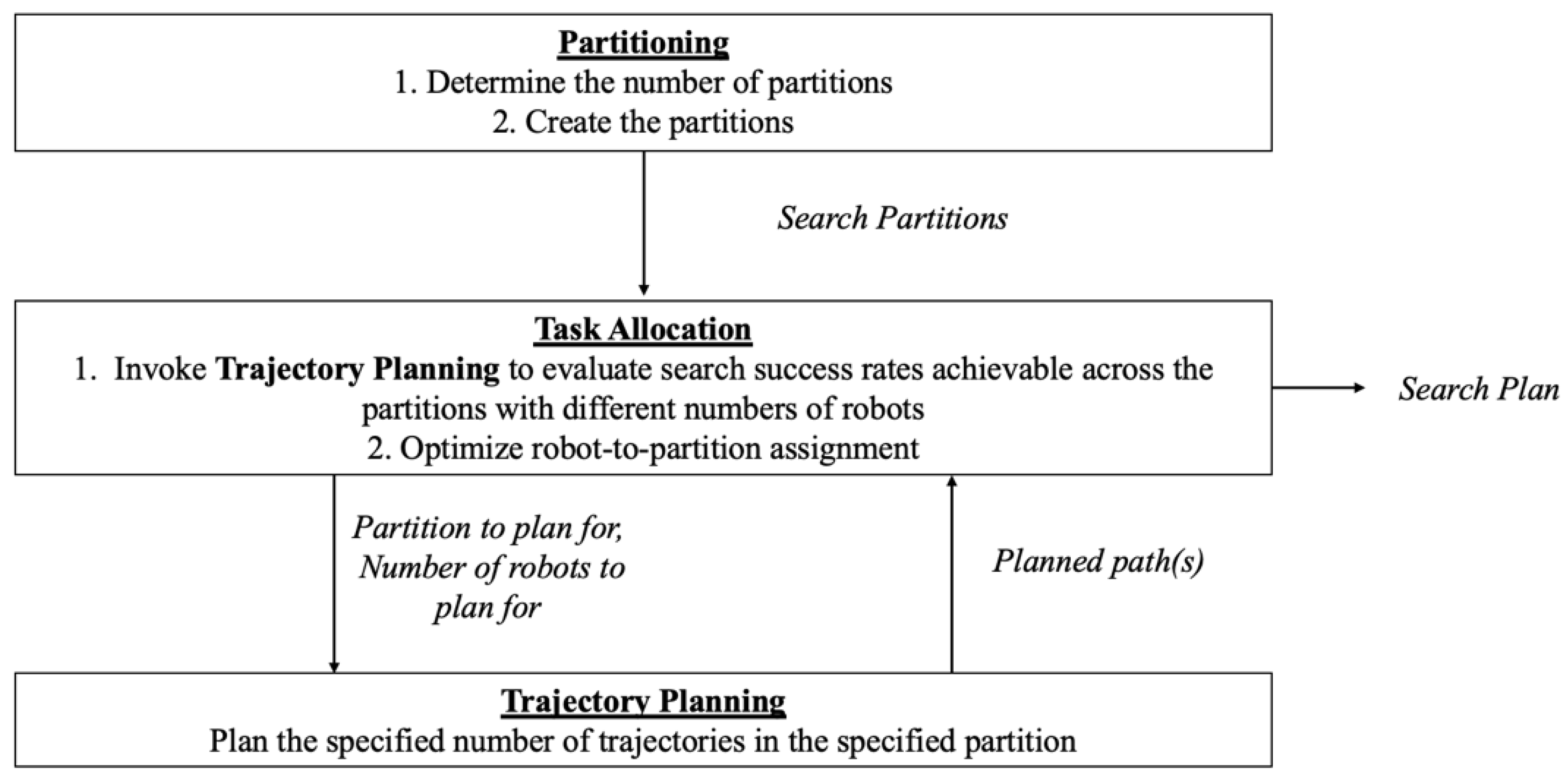
3.2. Search Planning
| Algorithm 1. Search planning pseudocode. | |
| 1 | number_of_partitions←DeterminePartitionNumber(number_of_robots, number_of_intersections) |
| 2 | partitions ← CreatePartitions(number_of_partitions) |
| 3 | |
| 4 | for each partition in partitions |
| 5 | for each number_of_robots_in_partition in NumberOfRobotsInPartitionProposal( |
| 6 | number_of_robots, number_of_intersections) |
| 7 | paths ← PlanTrajectories(number_of_robots_in_partition, partition) |
| 8 | save paths in paths_collection |
| 9 | success_rate ← Evaluate(paths) |
| 10 | save success_rate in success_rate_collection |
| 11 | end for |
| 12 | end for |
| 13 | |
| 14 | search_plan ← AssignRobotsToPartitions(success_rate_collection, paths_collection) |
| 15 | |
| 16 | function PlanTrajectories(number_of_robots_in_partition, partition) |
| 17 | starting_locations ← SelectStartingLocations(number_of_robots_in_partition, partition) |
| 18 | for each location in starting_locations |
| 19 | path ← MCTS(location) |
| 20 | save path in planned_paths |
| 21 | end for |
| 22 | return planned_paths |
3.2.1. Partitioning
3.2.2. Task Allocation
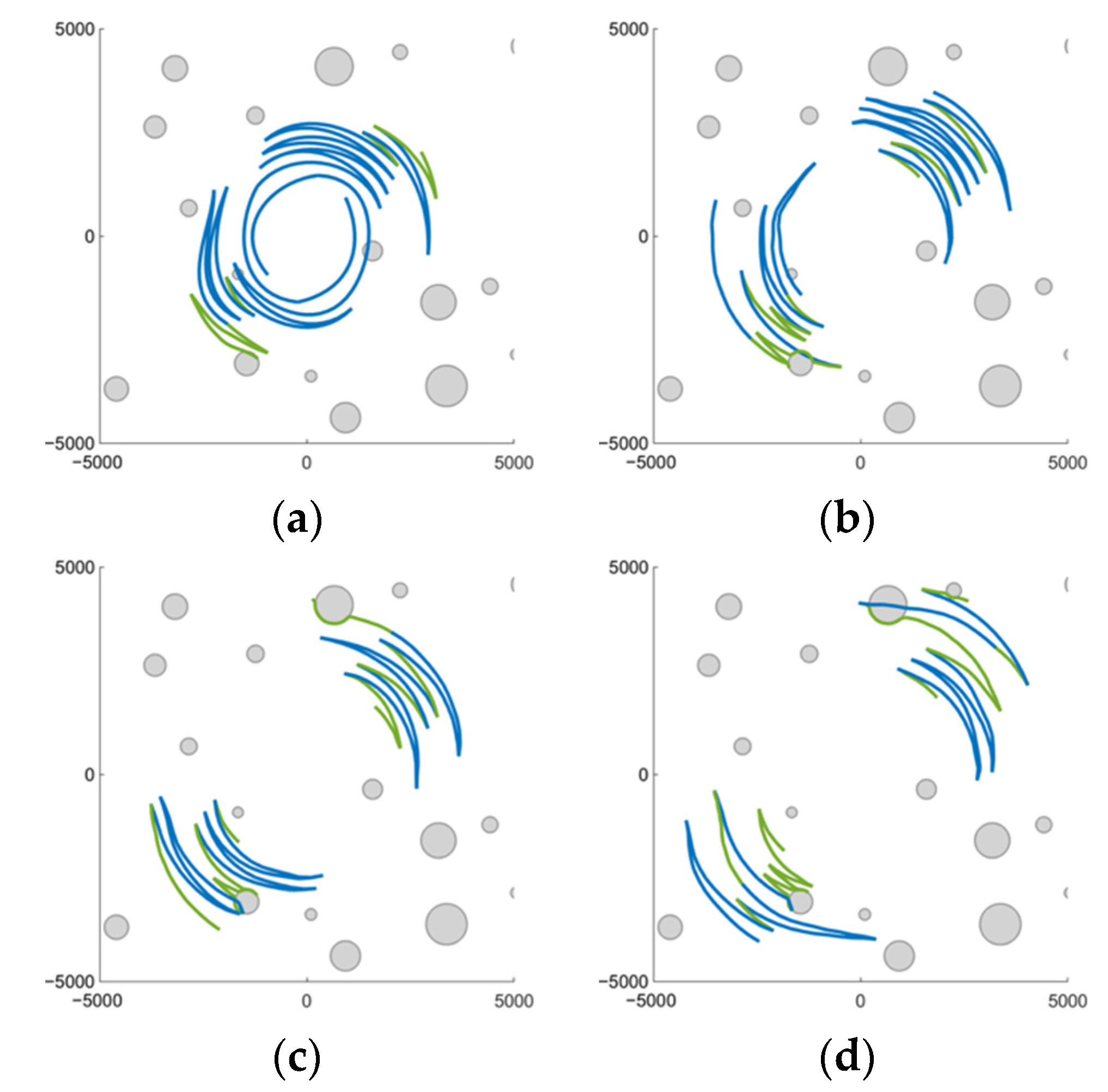
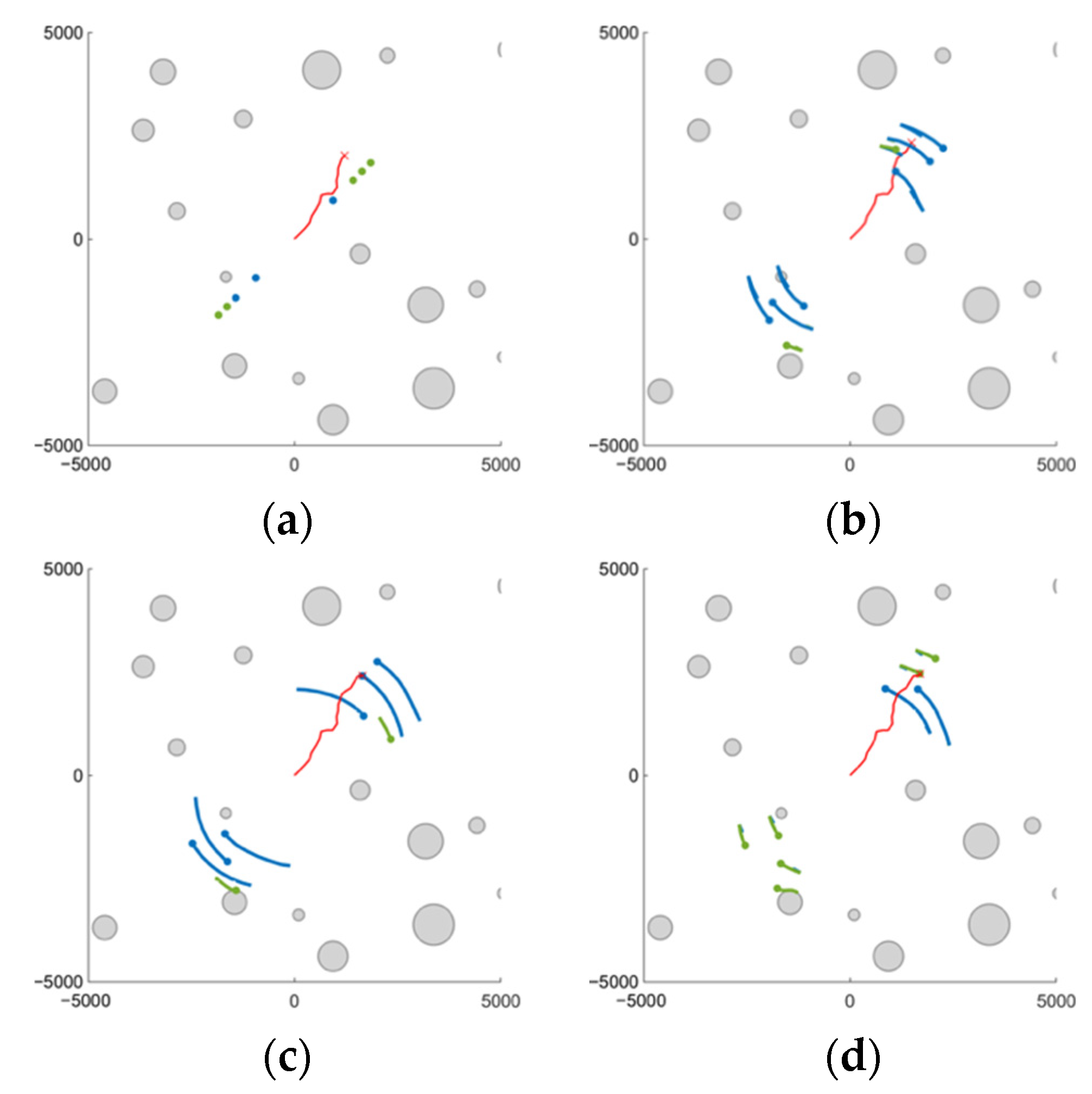
3.2.3. Trajectory Planning
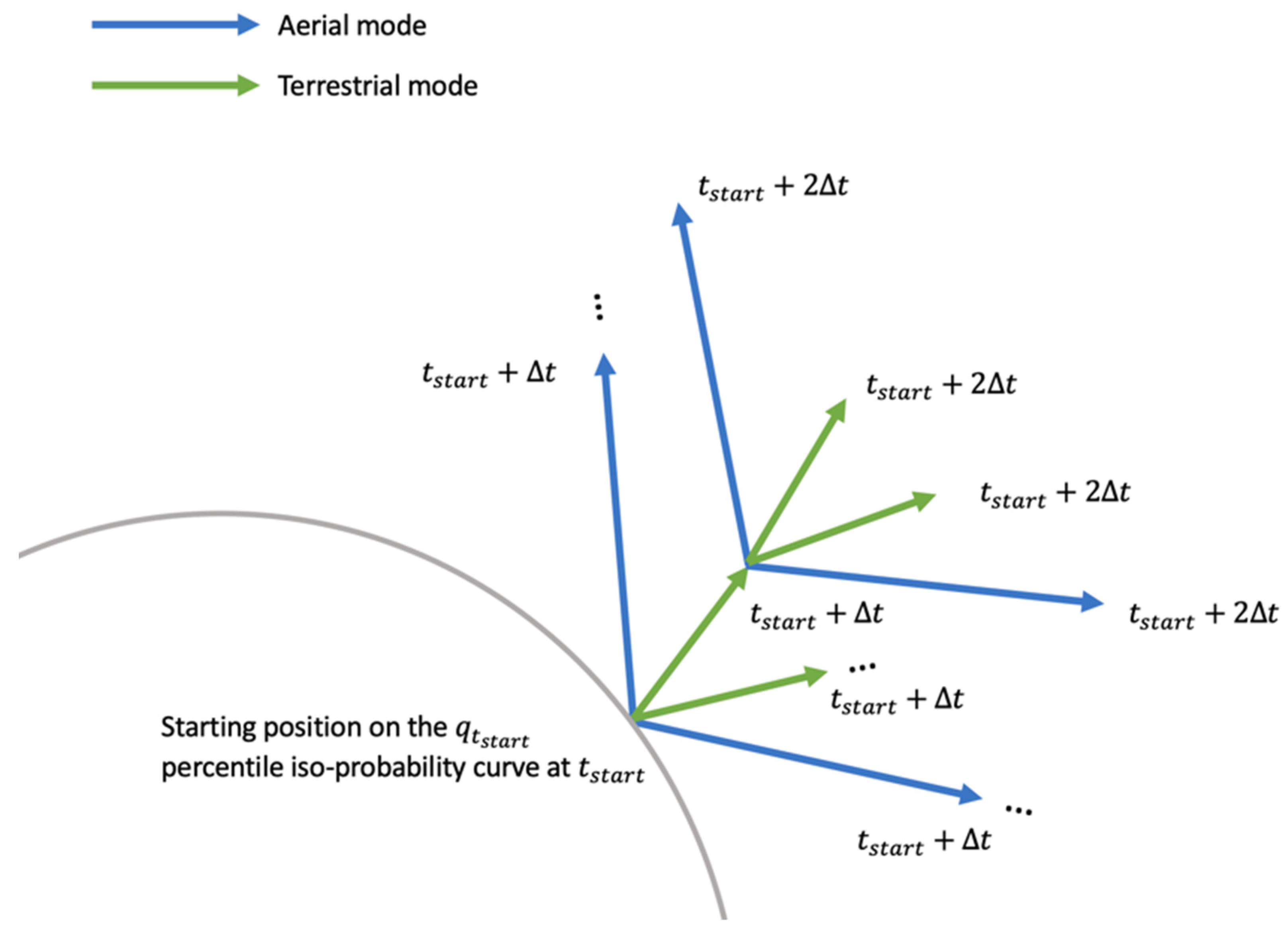
Selection of Starting Angular-Positions
Trajectory Generation I: Selections of Locomotion Mode and Direction of Curve Traversal
Trajectory Generation II: Tree Structure
Trajectory Generation III: Multi-Agent Monte-Carlo Tree Search
Trajectory Generation IV: 3D Iso-Probability Curves as Heuristic Functions in MCTS
4. Results and Discussion
4.1. Illustrative Example
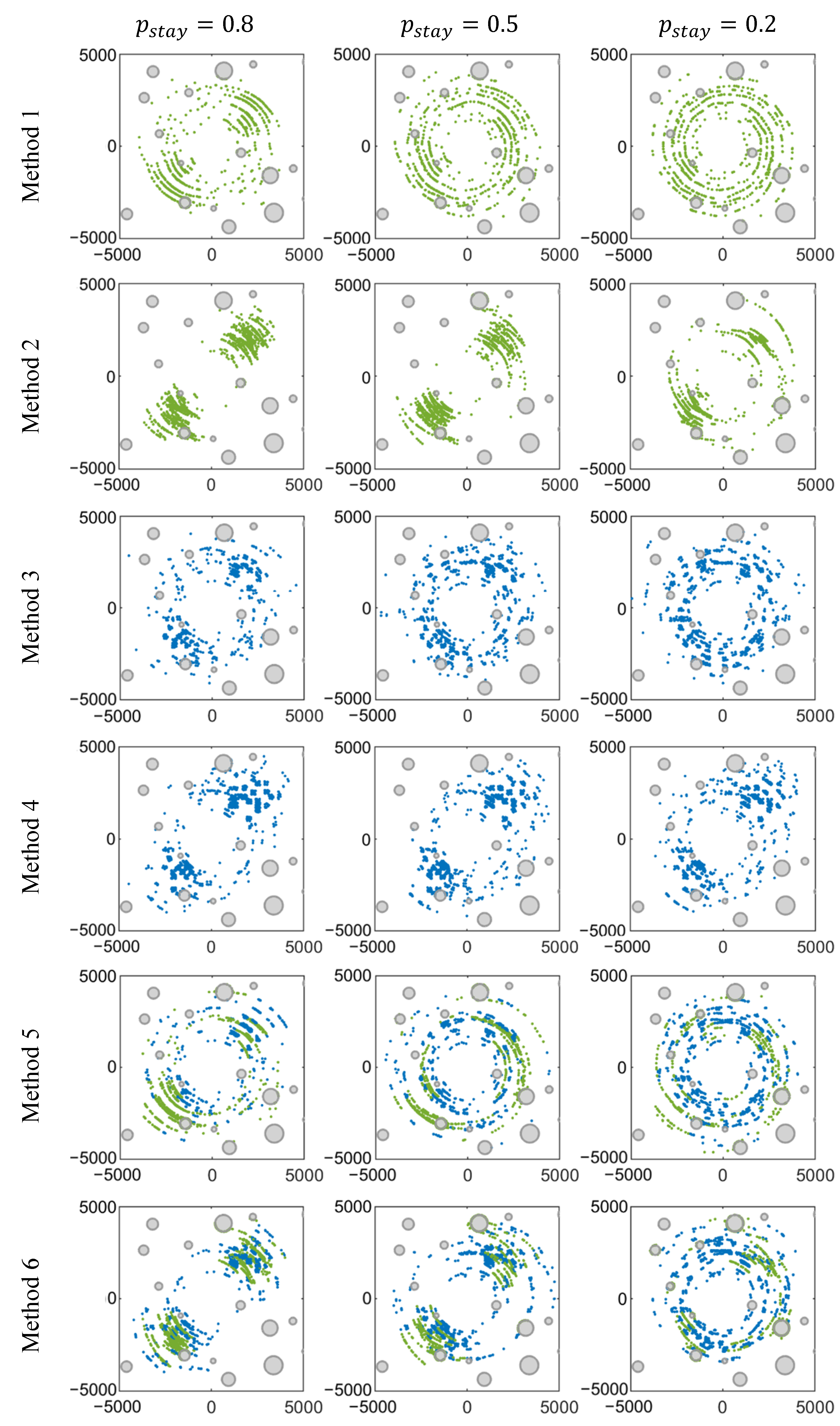
4.2. Comparative Simulated Experiments
4.2.1. Selections of Mode and Direction
4.2.2. 3D Curves as Heuristic Functions
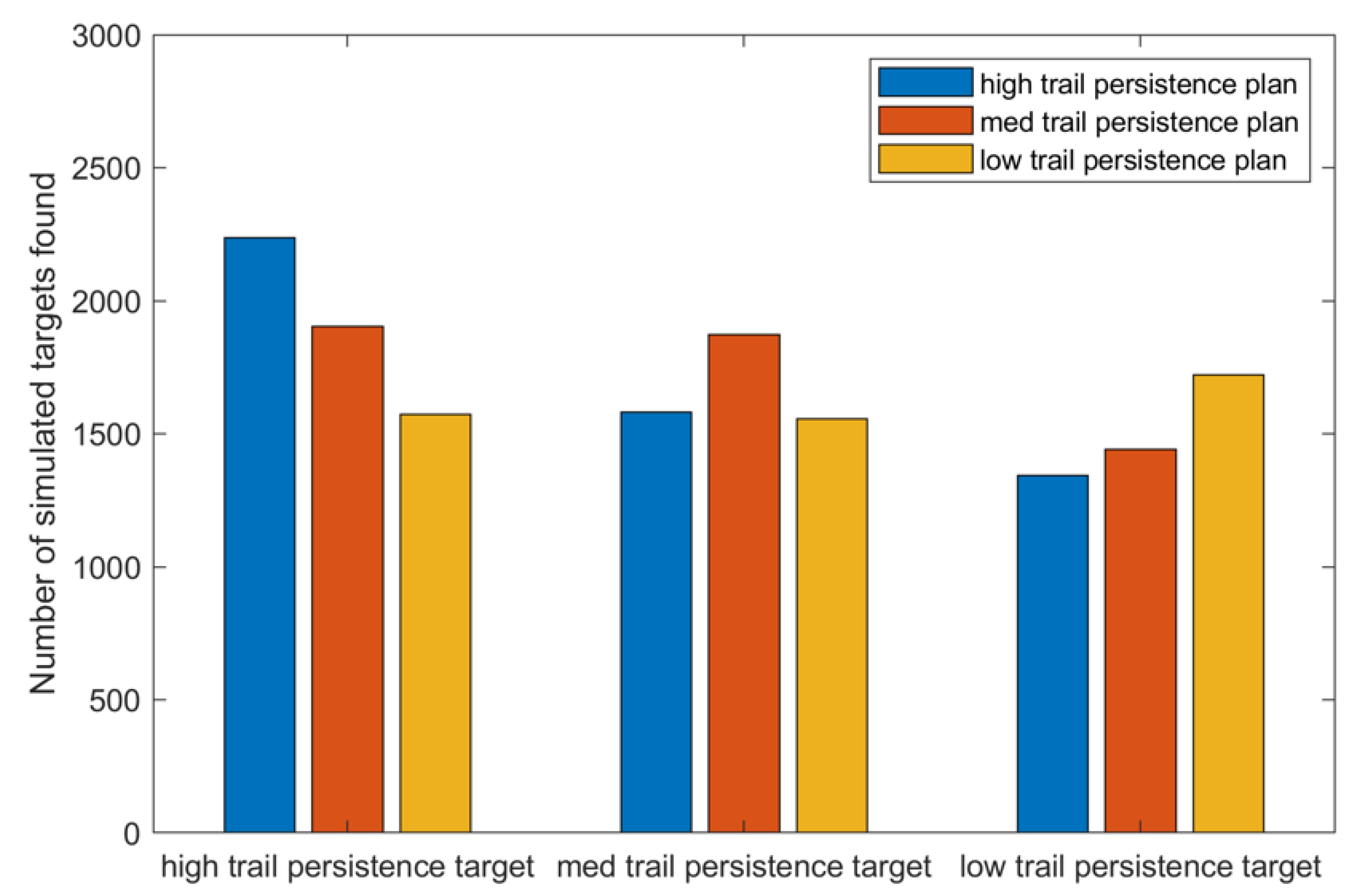
4.3. Robustness Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The Current State and Future Outlook of Rescue Robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, H.; Helbling, E.F.; Jafferis, N.T.; Zufferey, R.; Ong, A.; Ma, K.; Gravish, N.; Chirarattananon, P.; Kovac, M.; et al. A Biologically Inspired, Flapping-Wing, Hybrid Aerial-Aquatic Microrobot. Sci. Robot. 2017, 2, eaao5619. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lock, R.J.; Vaidyanathan, R.; Burgess, S.C.; Loveless, J. Development of a Biologically Inspired Multi-Modal Wing Model for Aerial-Aquatic Robotic Vehicles through Empirical and Numerical Modelling of the Common Guillemot, Uria Aalge. Bioinspir. Biomim. 2010, 5, 046001. [Google Scholar] [CrossRef] [PubMed]
- Lock, R.J.; Vaidyanathan, R.; Burgess, S.C. Design and Experimental Verification of a Biologically Inspired Multi-Modal Wing for Aerial-Aquatic Robotic Vehicles. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 681–687. [Google Scholar]
- Dickson, J.D.; Clark, J.E. Design of a Multimodal Climbing and Gliding Robotic Platform. IEEE/ASME Trans. Mechatron. 2013, 18, 494–505. [Google Scholar] [CrossRef]
- Shin, W.D.; Park, J.; Park, H. Bio-Inspired Design of a Gliding-Walking Multi-Modal Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 8158–8164. [Google Scholar]
- Horvat, T.; Karakasiliotis, K.; Melo, K.; Fleury, L.; Thandiackal, R.; Ijspeert, A.J. Inverse Kinematics and Reflex Based Controller for Body-Limb Coordination of a Salamander-like Robot Walking on Uneven Terrain. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 195–201. [Google Scholar] [CrossRef]
- Crespi, A.; Badertscher, A.; Guignard, A.; Ijspeert, A.J. AmphiBot I: An Amphibious Snake-like Robot. Rob. Auton. Syst. 2005, 50, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Ma, S.; Li, B.; Wang, Y. An Amphibious Snake-like Robot with Terrestrial and Aquatic Gaits. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2960–2961. [Google Scholar]
- Dudek, G.; Giguere, P.; Prahacs, C.; Saunderson, S.; Sattar, J.; Torres-Mendez, L.; Jenkin, M.; German, A.; Hogue, A.; Ripsman, A.; et al. AQUA: An Amphibious Autonomous Robot. Computer 2007, 40, 46–53. [Google Scholar] [CrossRef]
- Daler, L.; Mintchev, S.; Stefanini, C.; Floreano, D. A Bioinspired Multi-Modal Flying and Walking Robot. Bioinspir. Biomim. 2015, 10, 016005. [Google Scholar] [CrossRef] [PubMed]
- Pratt, C.J.; Leang, K.K. Dynamic Underactuated Flying-Walking (DUCK) Robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3267–3274. [Google Scholar]
- Yu, Y.; Ding, X. On Hybrid Modeling and Control of a Multi-Propeller Multifunction Aerial Robot with Flying-Walking Locomotion. Auton. Robots 2015, 38, 225–242. [Google Scholar] [CrossRef]
- Lock, R.J.; Burgess, S.C.; Vaidyanathan, R. Multi-Modal Locomotion: From Animal to Application. Bioinspir. Biomim. 2013, 9, 011001. [Google Scholar] [CrossRef] [Green Version]
- Russo, M.; Ceccarelli, M. A Survey on Mechanical Solutions for Hybrid Mobile Robots. Robotics 2020, 9, 32. [Google Scholar] [CrossRef]
- Koester, R.J. Lost Person Behavior: A Search and Rescue Guide on Where to Look for Land, Air, and Water; dbS Productions: Charlottesville; dbS Productions LLC: Charlottesville, VA, USA, 2008; ISBN 1879471396. [Google Scholar]
- Hill, K.A. The Psychology of Lost. In Lost Person Behavior; National SAR Secretariat: Ottawa, ON, Canada, 1998. [Google Scholar]
- Lin, L.; Goodrich, M.A. A Bayesian Approach to Modeling Lost Person Behaviors Based on Terrain Features in Wilderness Search and Rescue. Comput. Math. Organ. Theory 2010, 16, 300–323. [Google Scholar] [CrossRef]
- Mohibullah, W.; Julier, S.J. Developing an Agent Model of a Missing Person in the Wilderness. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 4462–4469. [Google Scholar] [CrossRef]
- Hashimoto, A.; Abaid, N. An Agent-Based Model of Lost Person Dynamics for Enabling Wilderness Search and Rescue. In Proceedings of the Dynamic Systems and Control Conference, Park City, UT, USA, 8–11 October 2020; Volume 2, pp. 1–8. [Google Scholar] [CrossRef]
- Kashino, Z.; Kim, J.Y.; Nejat, G.; Benhabib, B. Spatiotemporal Adaptive Optimization of a Static-Sensor Network via a Non-Parametric Estimation of Target Location Likelihood. IEEE Sens. J. 2017, 17, 1479–1492. [Google Scholar] [CrossRef]
- Kashino, Z.; Nejat, G.; Benhabib, B. A Hybrid Strategy for Target Search Using Static and Mobile Sensors. IEEE Trans. Cybern. 2018, 50, 856–868. [Google Scholar] [CrossRef]
- Hood, S.; Benson, K.; Hamod, P.; Madison, D.; O’Kane, J.M.; Rekleitis, I. Bird’s Eye View: Cooperative Exploration by UGV and UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 247–255. [Google Scholar]
- Yanguas-Rojas, D.; Mojica-Nava, E. Exploration with Heterogeneous Robots Networks for Search and Rescue. IFAC-PapersOnLine 2017, 50, 7935–7940. [Google Scholar] [CrossRef]
- Al-Buraiki, O.; Wu, W.; Payeur, P. Probabilistic Allocation of Specialized Robots on Targets Detected Using Deep Learning Networks. Robotics 2020, 9, 54. [Google Scholar] [CrossRef]
- Rodriguez, M.; Al-Kaff, A.; Madridano, A.; Martin, D.; de la Escalera, A. Wilderness Search and Rescue with Heterogeneous Multi-Robot Systems. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 110–116. [Google Scholar]
- Dias, A.; Fernandes, T.; Almeida, J.; Martins, A.; Silva, E. 3D Path Planning Methods for Unmanned Aerial Vehicles in Search and Rescue Scenarios. In Proceedings of the Human-Centric Robotics: Proceedings of CLAWAR 2017: 20th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Porto, Portugal, 11–13 September 2017; World Scientific: Toh Tuck Link, Singapore, 2017; pp. 213–220. [Google Scholar]
- Queralta, J.P.; Taipalmaa, J.; Can Pullinen, B.; Sarker, V.K.; Nguyen Gia, T.; Tenhunen, H.; Gabbouj, M.; Raitoharju, J.; Westerlund, T. Collaborative Multi-Robot Search and Rescue: Planning, Coordination, Perception, and Active Vision. IEEE Access 2020, 8, 191617–191643. [Google Scholar] [CrossRef]
- Woiceshyn, K.; Kashino, Z.; Nejat, G.; Benhabib, B. Vehicle Routing for Resource Management in Time-Phased Deployment of Sensor Networks. IEEE Trans. Autom. Sci. Eng. 2019, 16, 716–728. [Google Scholar] [CrossRef]
- Lee Shin, J.C.; Kashino, Z.; Nejat, G.; Benhabib, B. A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue. Robotics 2019, 8, 61. [Google Scholar] [CrossRef] [Green Version]
- Vilela, J.; Kashino, Z.; Ly, R.; Nejat, G.; Benhabib, B. A Dynamic Approach to Sensor Network Deployment for Mobile-Target Detection in Unstructured, Expanding Search Areas. IEEE Sens. J. 2016, 16, 4405–4417. [Google Scholar] [CrossRef]
- Kashino, Z.; Nejat, G.; Benhabib, B. Multi-UAV Based Autonomous Wilderness Search and Rescue Using Target Iso-Probability Curves. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 636–643. [Google Scholar] [CrossRef]
- Wasim, S.; Kashino, Z.; Nejat, G.; Benhabib, B. Directional-Sensor Network Deployment Planning for Mobile-Target Search. Robotics 2020, 9, 82. [Google Scholar] [CrossRef]
- Nedjati, A.; Izbirak, G.; Vizvari, B.; Arkat, J. Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment. Robotics 2016, 5, 26. [Google Scholar] [CrossRef] [Green Version]
- Kashino, Z.; Nejat, G.; Benhabib, B. Aerial Wilderness Search and Rescue with Ground Support. J. Intell. Robot. Syst. Theory Appl. 2020, 99, 147–163. [Google Scholar] [CrossRef]
- Grocholsky, B.; Keller, J.; Kumar, V.; Pappas, G. Cooperative Air and Ground Surveillance. IEEE Robot. Autom. Mag. 2006, 13, 16–26. [Google Scholar] [CrossRef] [Green Version]
- Schedl, D.C.; Kurmi, I.; Bimber, O. An Autonomous Drone for Search and Rescue in Forests Using Airborne Optical Sectioning. Sci. Robot. 2021, 6, eabg1188. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, K.; Ok, K.; Tran, L.; Allen, D.; Roy, N.; How, J.P. Search and Rescue under the Forest Canopy Using Multiple UAVs. Int. J. Rob. Res. 2020, 39, 1201–1221. [Google Scholar] [CrossRef]
- Marconi, L.; Melchiorri, C.; Beetz, M.; Pangercic, D.; Siegwart, R.; Leutenegger, S.; Carloni, R.; Stramigioli, S.; Bruyninckx, H.; Doherty, P.; et al. The SHERPA Project: Smart Collaboration between Humans and Ground-Aerial Robots for Improving Rescuing Activities in Alpine Environments. In Proceedings of the 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; pp. 12–15. [Google Scholar] [CrossRef]
- Choudhury, S.; Knickerbocker, J.P.; Kochenderfer, M.J. Dynamic Real-Time Multimodal Routing with Hierarchical Hybrid Planning. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 2397–2404. [Google Scholar] [CrossRef] [Green Version]
- Terry Suh, H.J.; Xiong, X.; Singletary, A.; Ames, A.D.; Burdick, J.W. Energy-Efficient Motion Planning for Multi-Modal Hybrid Locomotion. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 7027–7033. [Google Scholar] [CrossRef]
- Araki, B.; Strang, J.; Pohorecky, S.; Qiu, C.; Naegeli, T.; Rus, D. Multi-Robot Path Planning for a Swarm of Robots That Can Both Fly and Drive. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5575–5582. [Google Scholar] [CrossRef]
- MacWan, A.; Nejat, G.; Benhabib, B. Target-Motion Prediction for Robotic Search and Rescue in Wilderness Environments. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 1287–1298. [Google Scholar] [CrossRef]
- MacWan, A.; Nejat, G.; Benhabib, B. On-Line Target-Motion Prediction for Autonomous Multirobot Search in Realistic Terrains with Time-Expanding Boundaries: A Novel Probabilistic Approach. In Proceedings of the 2010 IEEE International Conference on Automation Science and Engineering, Toronto, ON, Canada, 21–24 August 2010. [Google Scholar]
- Kashino, Z.; Vilela, J.; Kim, J.Y.; Nejat, G.; Benhabib, B. An Adaptive Static-Sensor Network Deployment Strategy for Detecting Mobile Targets. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Macwan, A.; Nejat, G.; Benhabib, B. Optimal Deployment of Robotic Teams for Autonomous Wilderness Search and Rescue. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4544–4549. [Google Scholar] [CrossRef]
- Macwan, A.; Vilela, J.; Nejat, G.; Benhabib, B. A Multirobot Path-Planning Strategy for Autonomous Wilderness Search and Rescue. IEEE Trans. Cybern. 2015, 45, 1784–1797. [Google Scholar] [CrossRef]
- Macwan, A.; Vilela, J.; Nejat, G.; Benhabib, B. Multi-Robot Deployment for Wilderness Search And Rescue. Int. J. Robot. Autom. 2016, 31, 124. [Google Scholar] [CrossRef]
- Macwan, A.; Benhabib, B. A Multi-Robot Coordination Methodology for Autonomous Search and Rescue. In Proceedings of the TIC-STH’09: 2009 IEEE Toronto International Conference—Science and Technology for Humanity, Toronto, ON, Canada, 26–27 September 2009. [Google Scholar]
- Syrotuck, W.G. Analysis of Lost Person Behavior: An Aid to Search Planning; Syrotuck, J.A., Ed.; Barkleigh Productions: Mechanicsburg, PA, USA, 2000. [Google Scholar]
- National Association for Search and Rescue. Fundamentals of Search and Rescue; Donald, C.C., Ed.; Jones & Bartlett Learning: Burlington, MA, USA, 2005. [Google Scholar]
- Quattrini Li, A.; Cipolleschi, R.; Giusto, M.; Amigoni, F. A Semantically-Informed Multirobot System for Exploration of Relevant Areas in Search and Rescue Settings. Auton. Robots 2016, 40, 581–597. [Google Scholar] [CrossRef]
- Xiong, P.; Liu, H.; Tian, Y.; Chen, Z. A Time Domain-Based Iterative Method for Helicopter Maritime Search Area Planning and Construction of the Simulation Environment. IEEE Access 2020, 8, 191460–191471. [Google Scholar] [CrossRef]
- Sozas & Company Ltd. The Theory of Search; Sozas & Company Ltd.: Fairfax, VA, USA, 1996. [Google Scholar]
- Browne, C.B.; Powley, E.; Whitehouse, D.; Lucas, S.M.; Cowling, P.I.; Rohlfshagen, P.; Tavener, S.; Perez, D.; Samothrakis, S.; Colton, S. A Survey of Monte Carlo Tree Search Methods. IEEE Trans. Comput. Intell. AI Games 2012, 4, 1–43. [Google Scholar] [CrossRef] [Green Version]
- Drake, P.; Uurtamo, S. Move Ordering vs Heavy Playouts: Where Should Heuristics Be Applied in Monte Carlo Go? In Proceedings of the the 3rd North American Game-On Conference, Gainesville, FL, USA, 10–12 September 2007; pp. 35–39. [Google Scholar]
- Chaslot, G.M.J.-B.; Winands, M.H.M.; Van Den Herik, H.J.; Uiterwijk, J.W.H.M.; BOUZY, B. Progressive Strategies for Monte-Carlo Tree Search. New Math. Nat. Comput. 2008, 4, 343–357. [Google Scholar] [CrossRef] [Green Version]
- Schadd, M.P.D.; Winands, M.H.M.; van den Herik, H.J.; Chaslot, G.M.J.-B.; Uiterwijk, J.W.H.M. Single-Player Monte-Carlo Tree Search. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–12. [Google Scholar]
- Heth, C.D.; Cornell, E.H. Characteristics of Travel by Persons Lost in Albertan Wilderness Areas. J. Environ. Psychol. 1998, 18, 223–235. [Google Scholar] [CrossRef]
- Salkin, H.M. The Knapsack Problem: A Survey*. Nav. Res. Logist. 1975, 22, 127–144. [Google Scholar] [CrossRef]
- Croft, E.A.; Benhabib, B.; Fenton, R.G. Near-Time Optimal Robot Motion Planning Foe on-Line Applications. J. Robot. Syst. 1995, 12, 553–567. [Google Scholar] [CrossRef]
- San Juan, V.; Santos, M.; Andújar, J.M. Intelligent UAV Map Generation and Discrete Path Planning for Search and Rescue Operations. Complexity 2018, 2018, 6879419. [Google Scholar] [CrossRef] [Green Version]
- Macwan, A. A Multi-Robot Coordination Methodology for Wilderness Search and Rescue. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Partition No. | Lower Bound (%) | Upper Bound (%) | Number of Robots, | Representative Speed, |
|---|---|---|---|---|
| 1 | 0 | 31.9 | 2 | 24.9 |
| 2 | 31.9 | 57.7 | 2 | 21.6 |
| 3 | 57.7 | 80.4 | 2 | 20.9 |
| 4 | 80.4 | 100 | 2 | 19.1 |
| Method No. | Mode Selection | Direction Selection |
|---|---|---|
| 1 | Disabled (terrestrial mode only) | Disabled (cw 1 traversal only) |
| 2 | Disabled (terrestrial mode only) | Enabled |
| 3 | Disabled (aerial mode only) | Disabled (cw 1 traversal only) |
| 4 | Disabled (aerial mode only) | Enabled |
| 5 | Enabled | Disabled (cw 1 traversal only) |
| 6 | Enabled | Enabled |
| Method No. | |||
|---|---|---|---|
| 1 | 778/0 | 812/0 | 832/0 |
| 2 | 1307.8/38.4 | 995.1/18.6 | 925.9/39.2 |
| 3 | 955/0 | 1073/0 | 1070/0 |
| 4 | 1584.8/33.6 | 1443.0/15.5 | 1376.2/36.9 |
| 5 | 1538.2/18.4 | 1535.2/22.5 | 1505.6/33.2 |
| 6 | 2194.4/63.9 | 1879.3/42.2 | 1699.6/30.1 |
| Without 3D Curve Heuristic | With 3D Curve Heuristic | |
|---|---|---|
| Mean | 2070.0 | 2209.8 |
| Std | 59.6 | 49.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ku, S.Y.; Nejat, G.; Benhabib, B. Wilderness Search for Lost Persons Using a Multimodal Aerial-Terrestrial Robot Team. Robotics 2022, 11, 64. https://doi.org/10.3390/robotics11030064
Ku SY, Nejat G, Benhabib B. Wilderness Search for Lost Persons Using a Multimodal Aerial-Terrestrial Robot Team. Robotics. 2022; 11(3):64. https://doi.org/10.3390/robotics11030064
Chicago/Turabian StyleKu, Shan Yu, Goldie Nejat, and Beno Benhabib. 2022. "Wilderness Search for Lost Persons Using a Multimodal Aerial-Terrestrial Robot Team" Robotics 11, no. 3: 64. https://doi.org/10.3390/robotics11030064
APA StyleKu, S. Y., Nejat, G., & Benhabib, B. (2022). Wilderness Search for Lost Persons Using a Multimodal Aerial-Terrestrial Robot Team. Robotics, 11(3), 64. https://doi.org/10.3390/robotics11030064