
Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
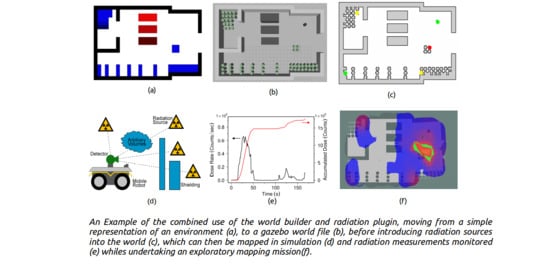
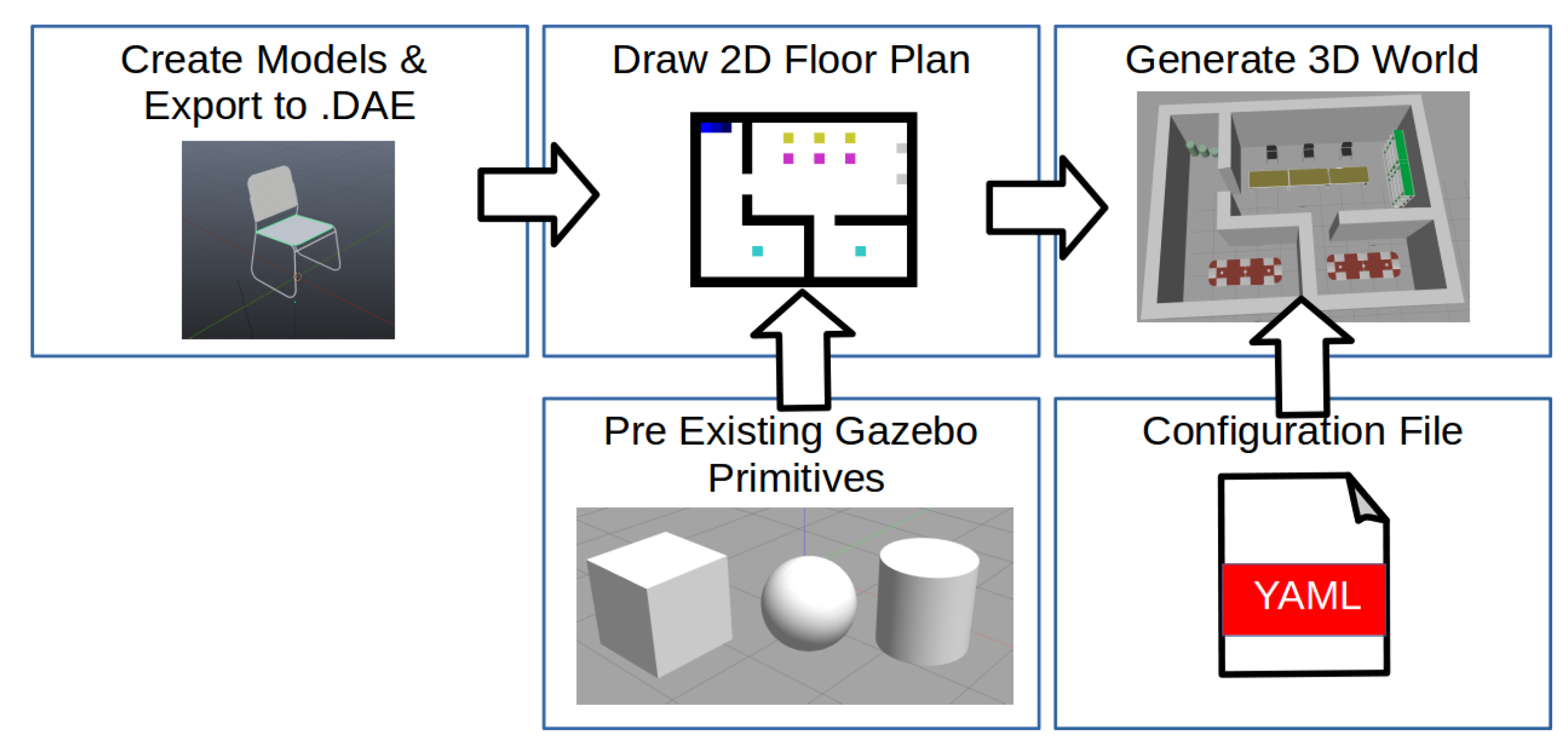
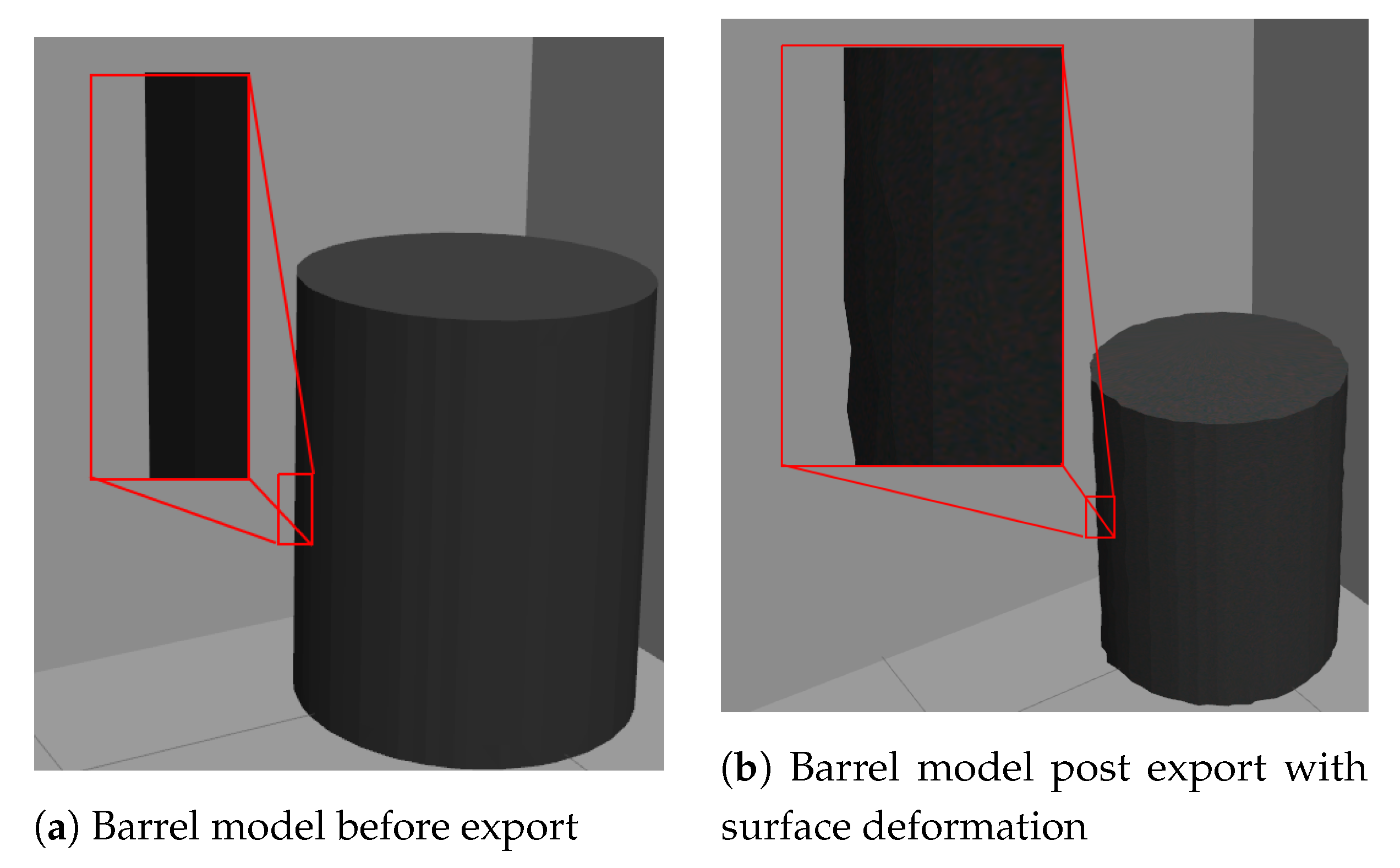
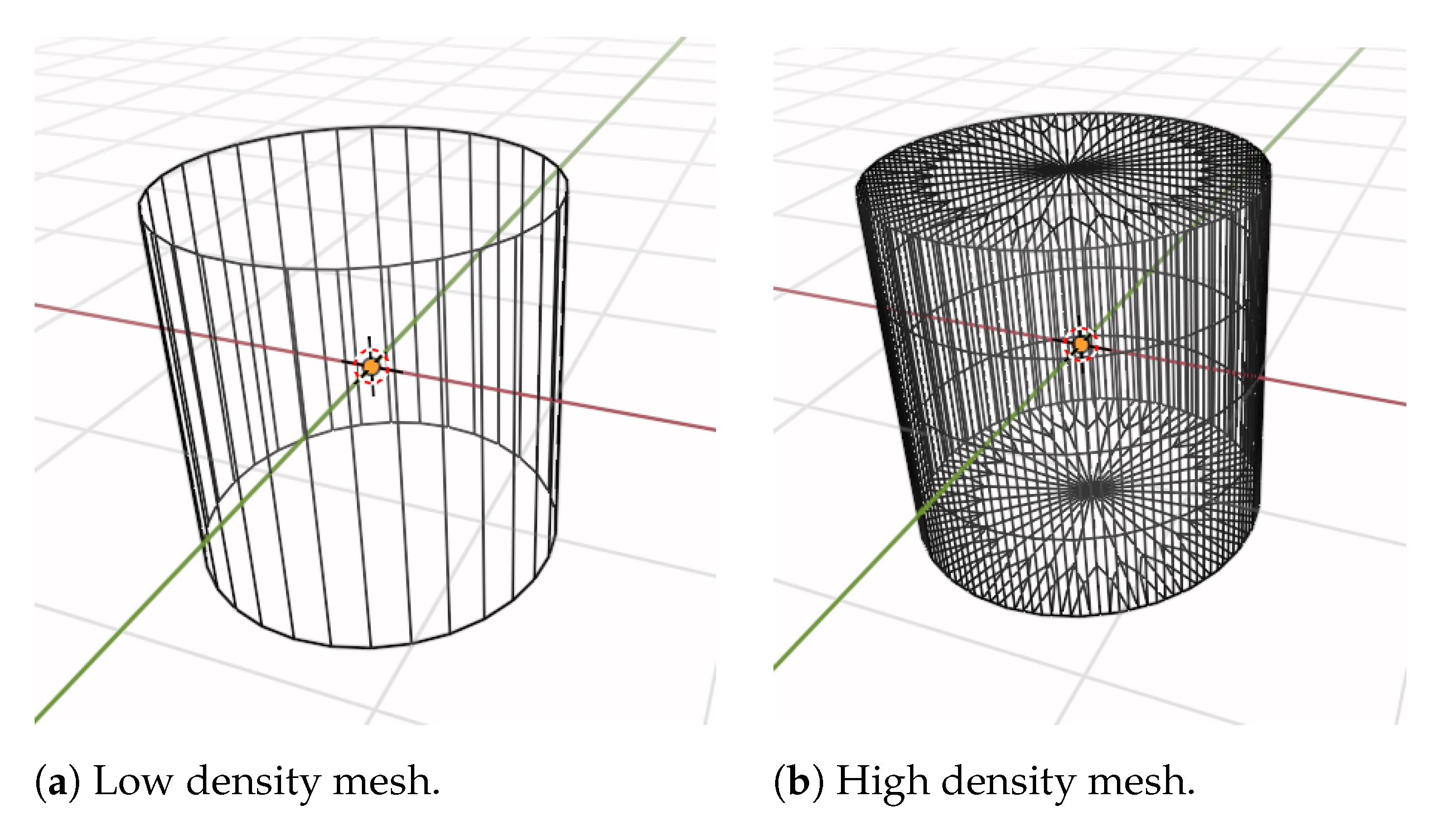
2.1. World Building
2.1.1. Graphical Environment Builder
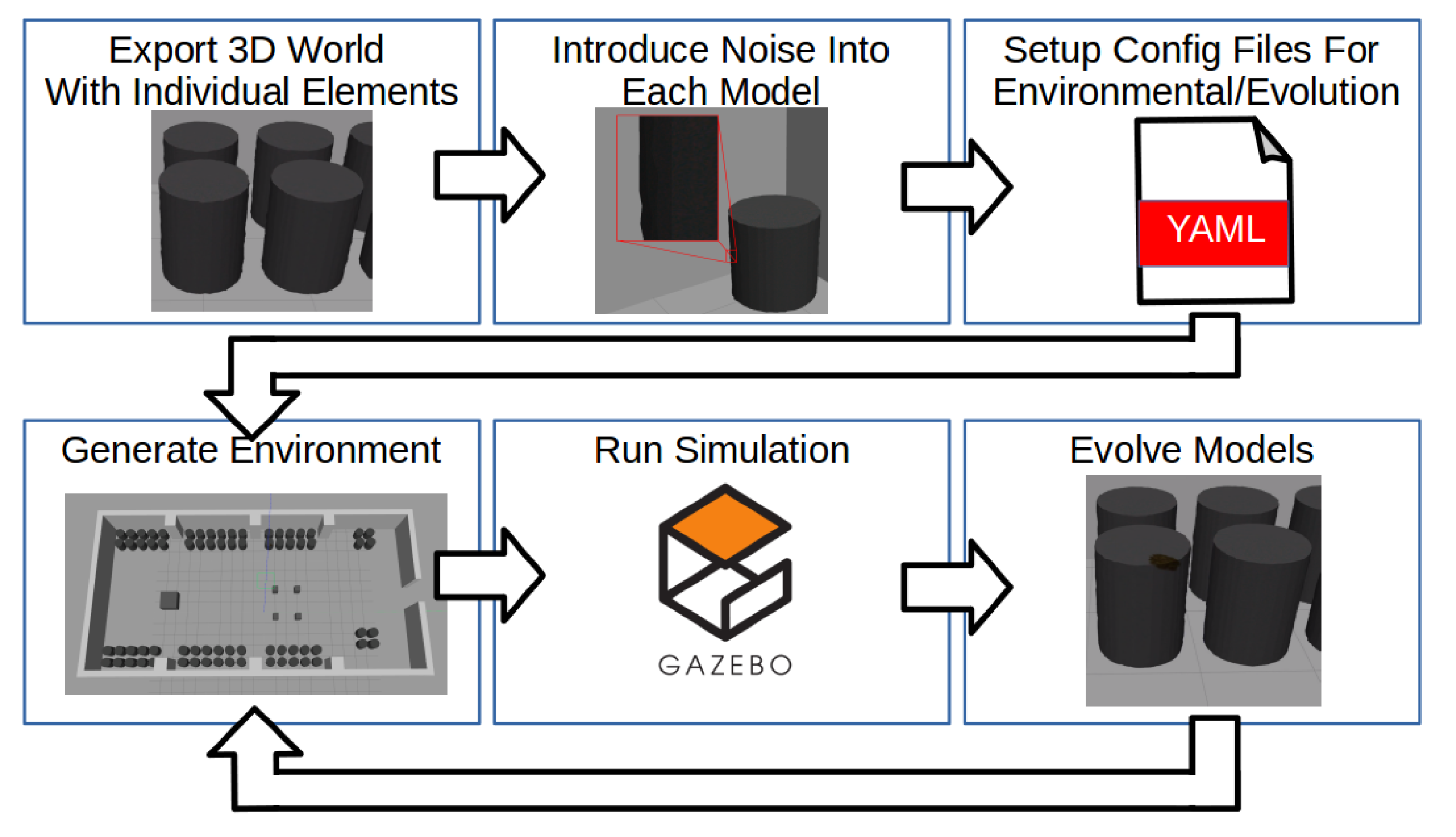
2.1.2. Procedural World Generation
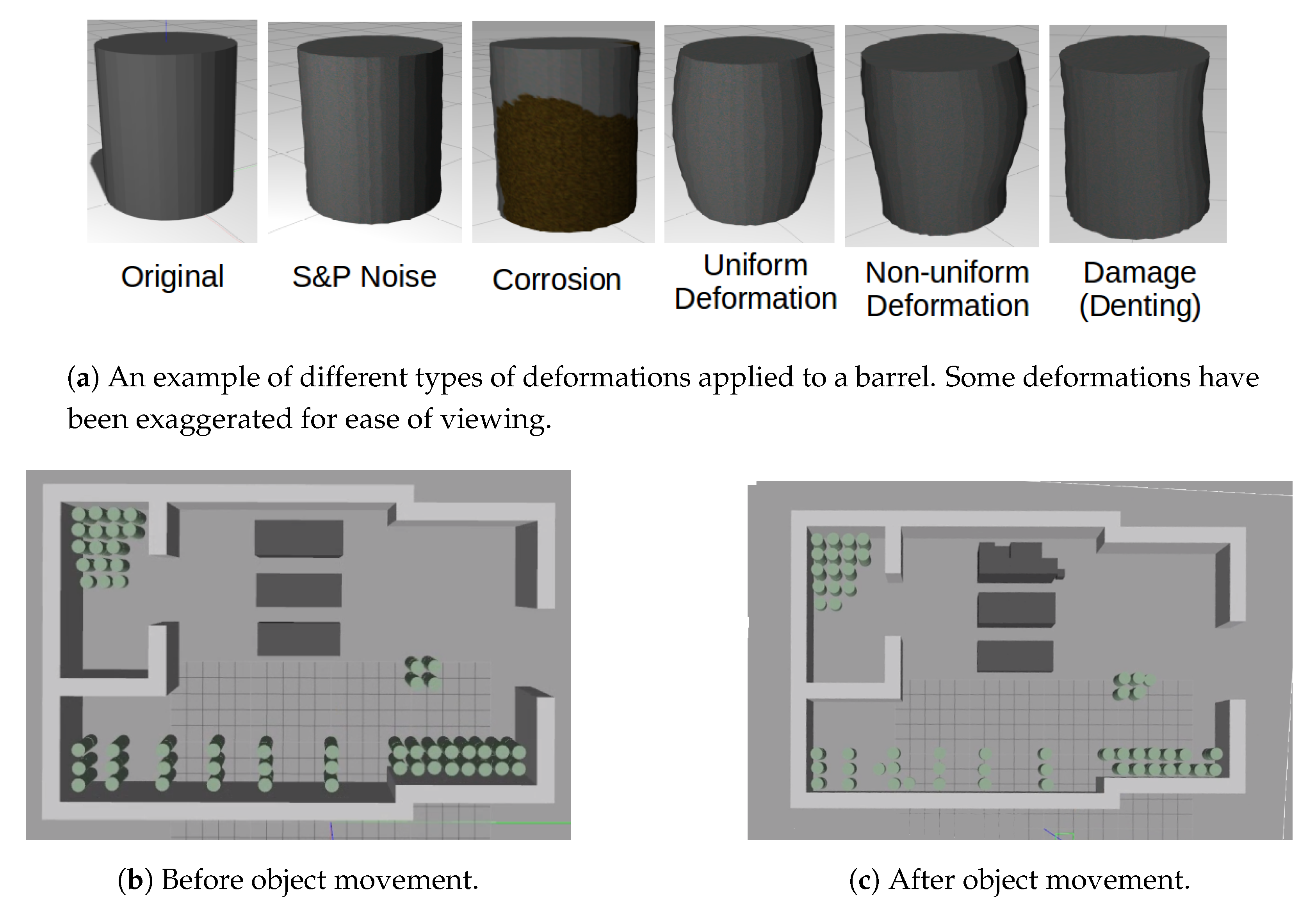
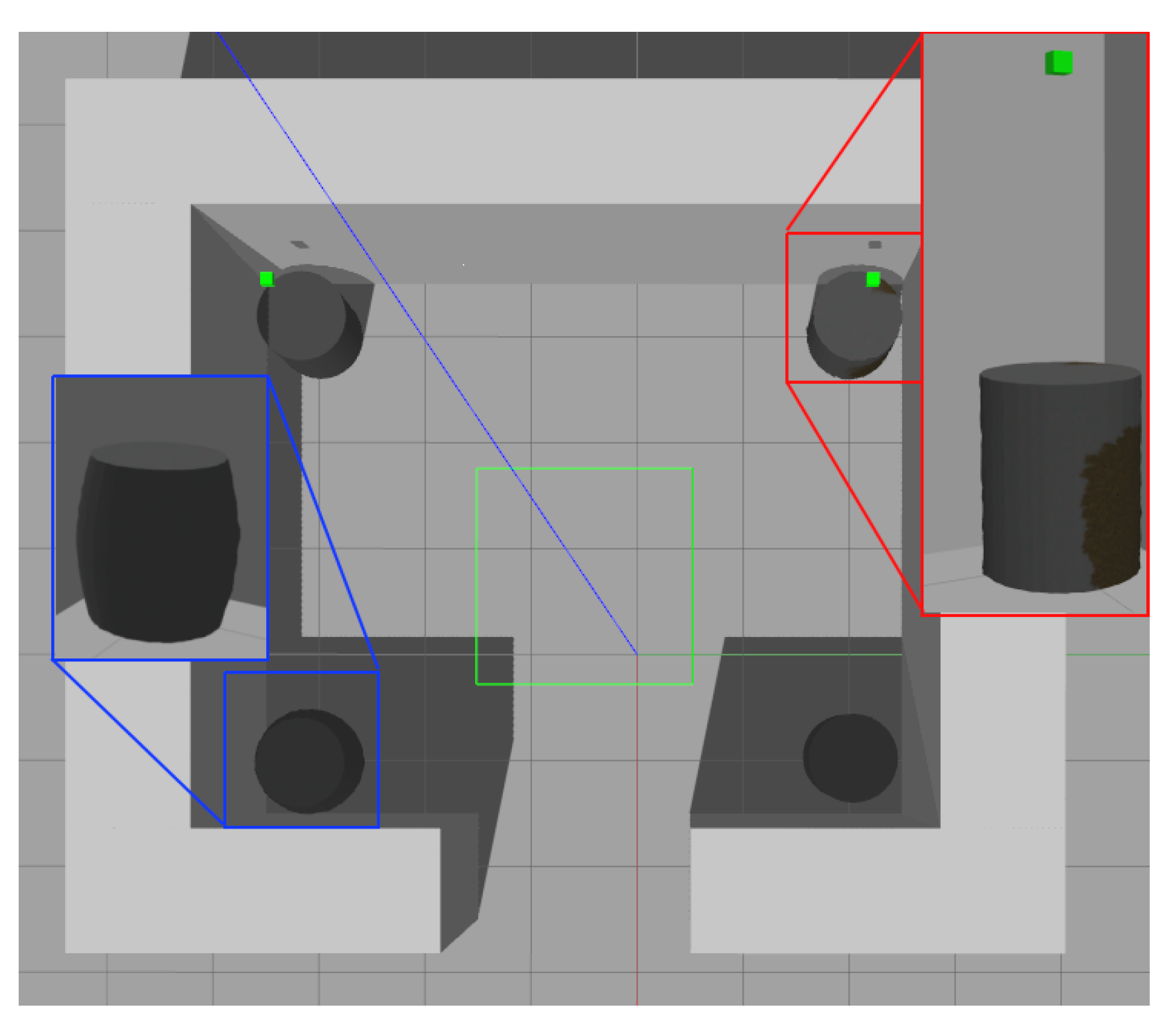
2.1.3. Procedural World Evolution
2.1.4. Environmental Hazard Generation
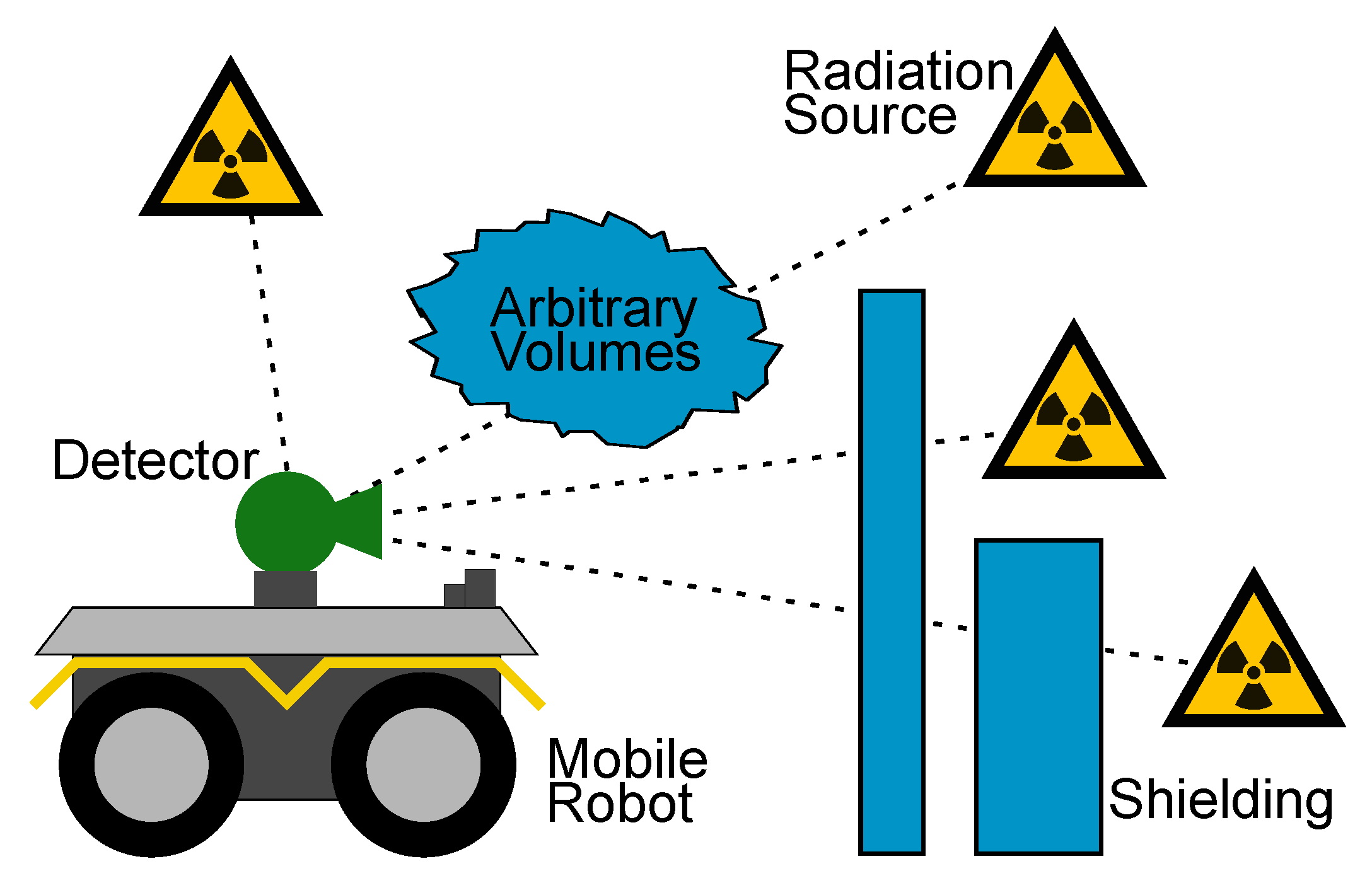
2.2. Modelling Radiation
2.2.1. Underlying Model
2.2.2. Gazebo Implementation
3. Results
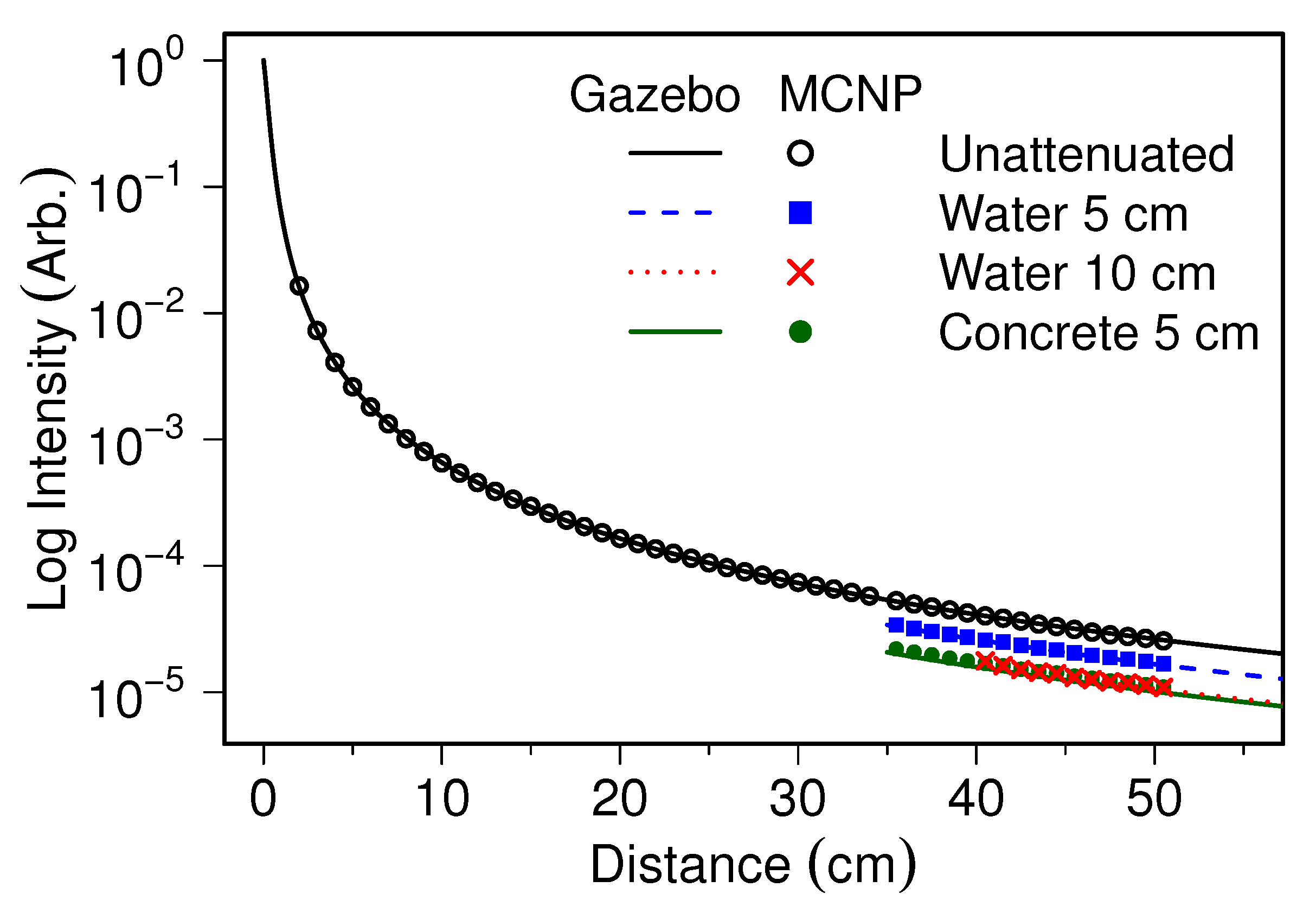
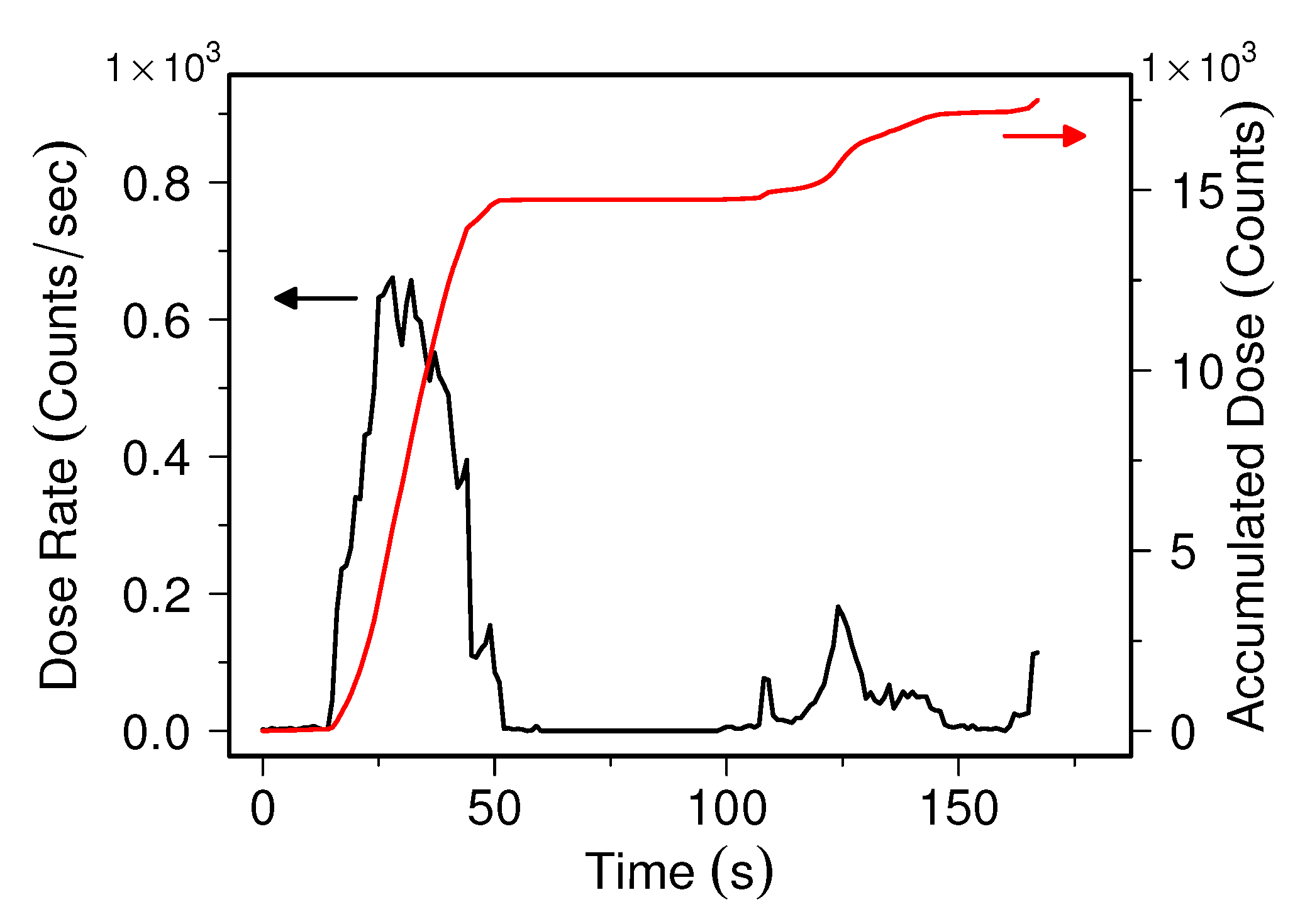
3.1. Benchmarking
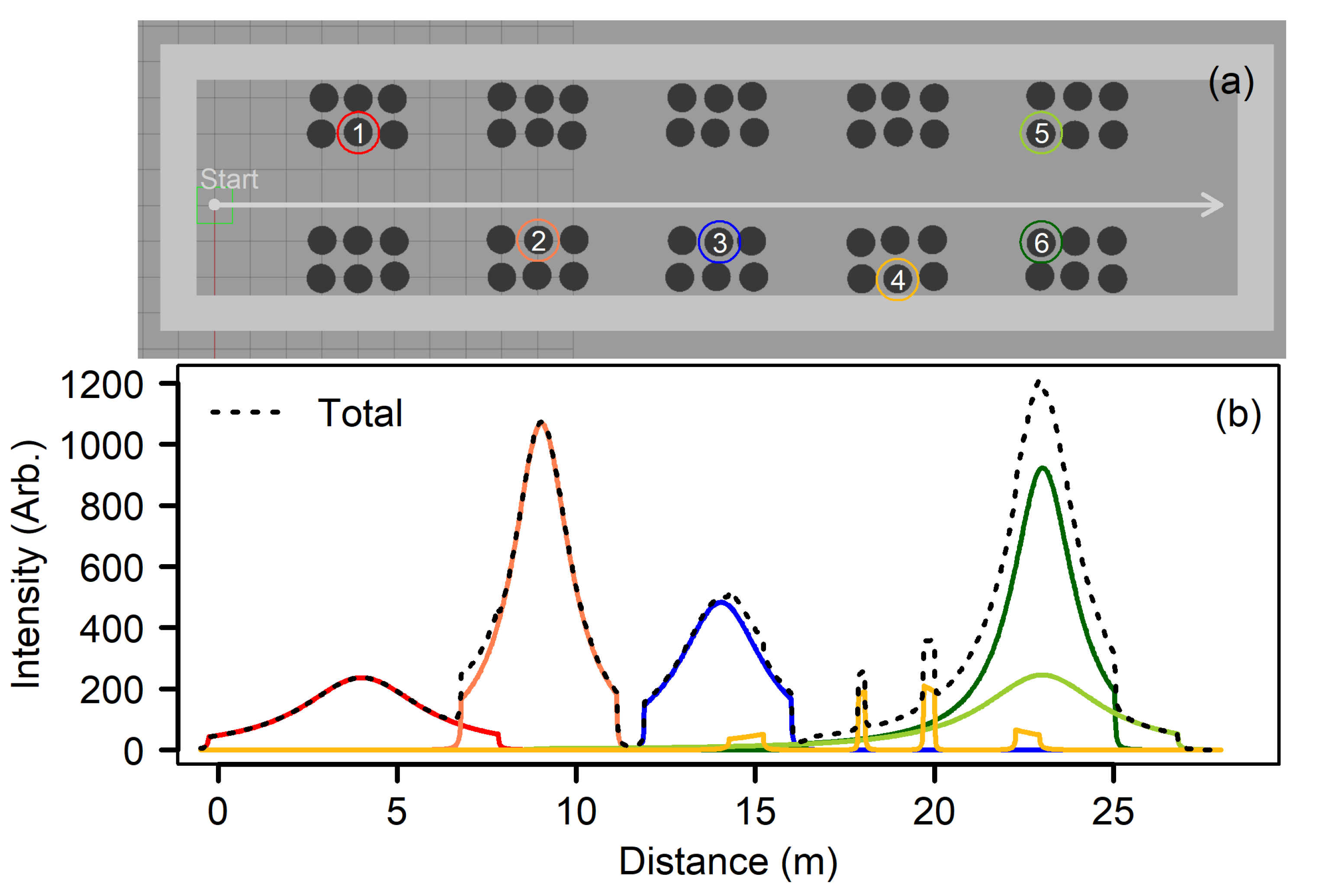
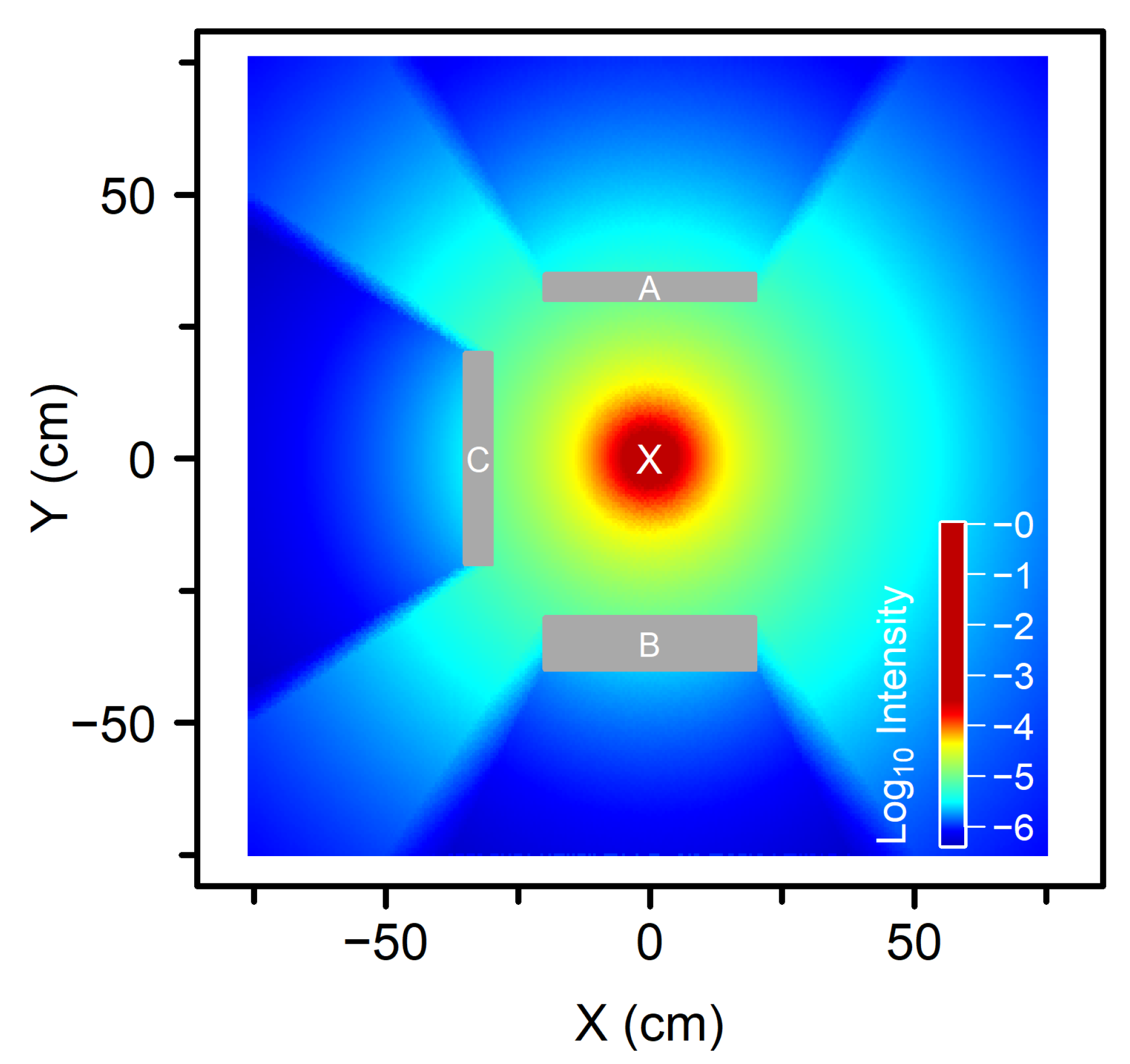
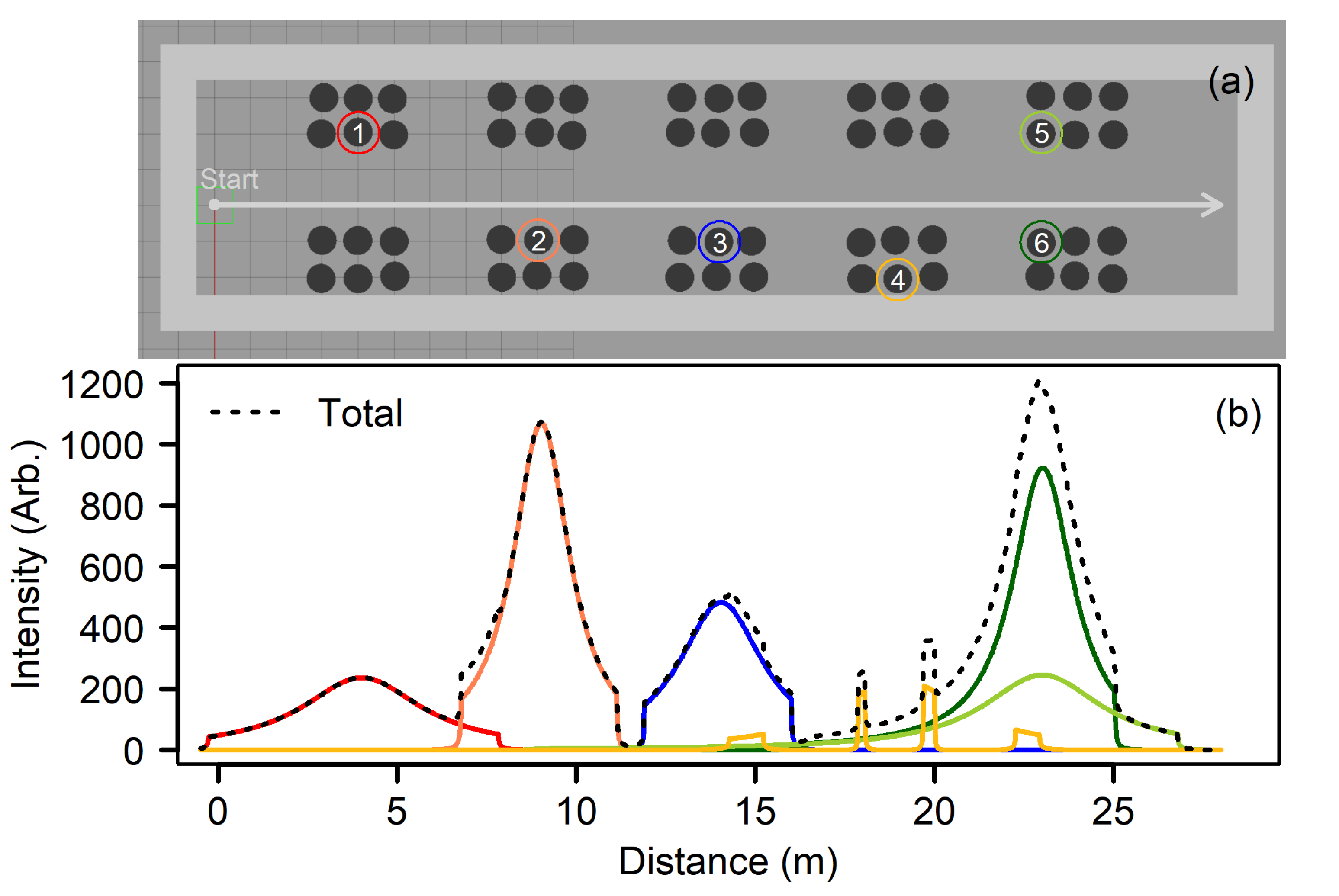
3.2. Multiple Radiation Sources in 3D
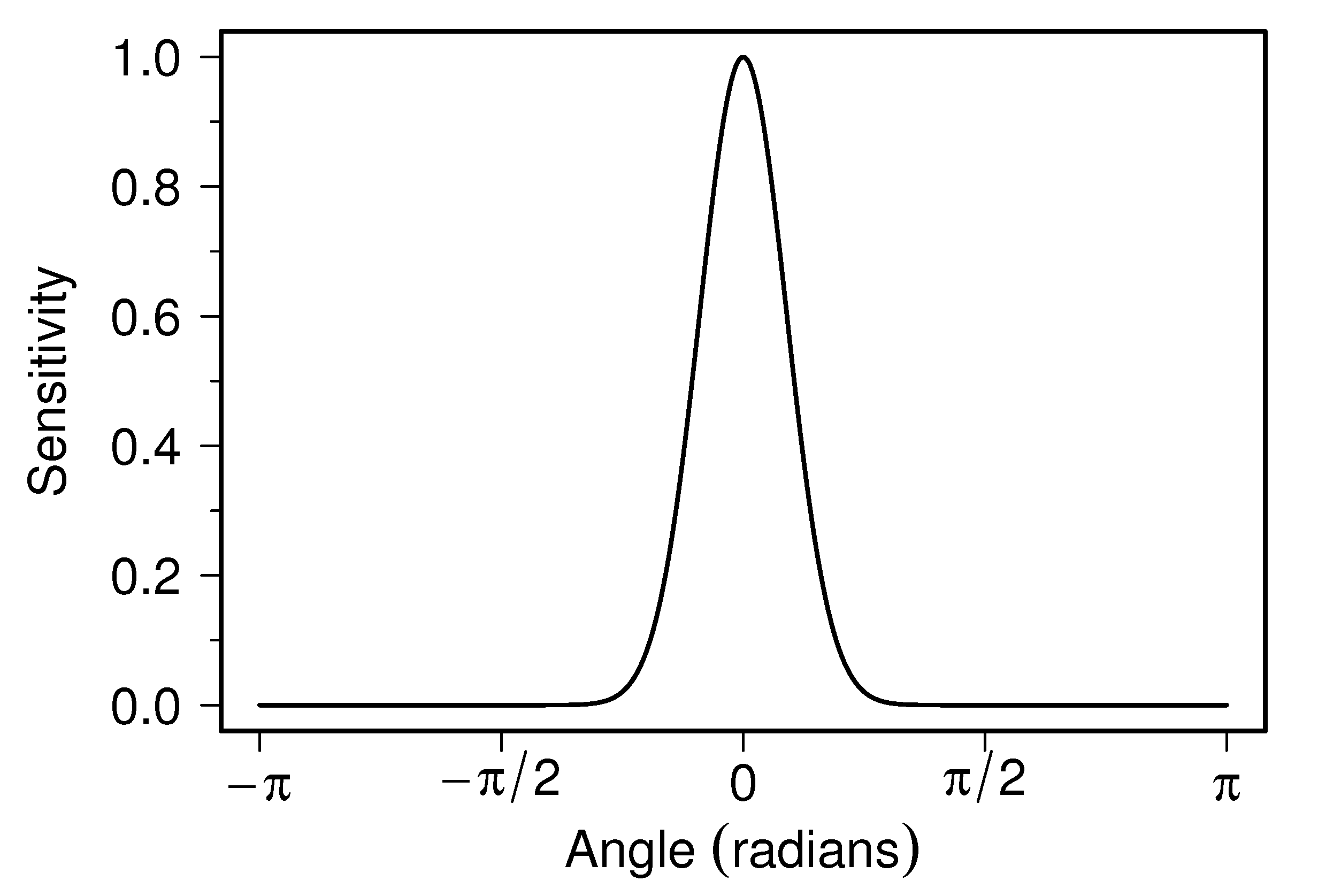
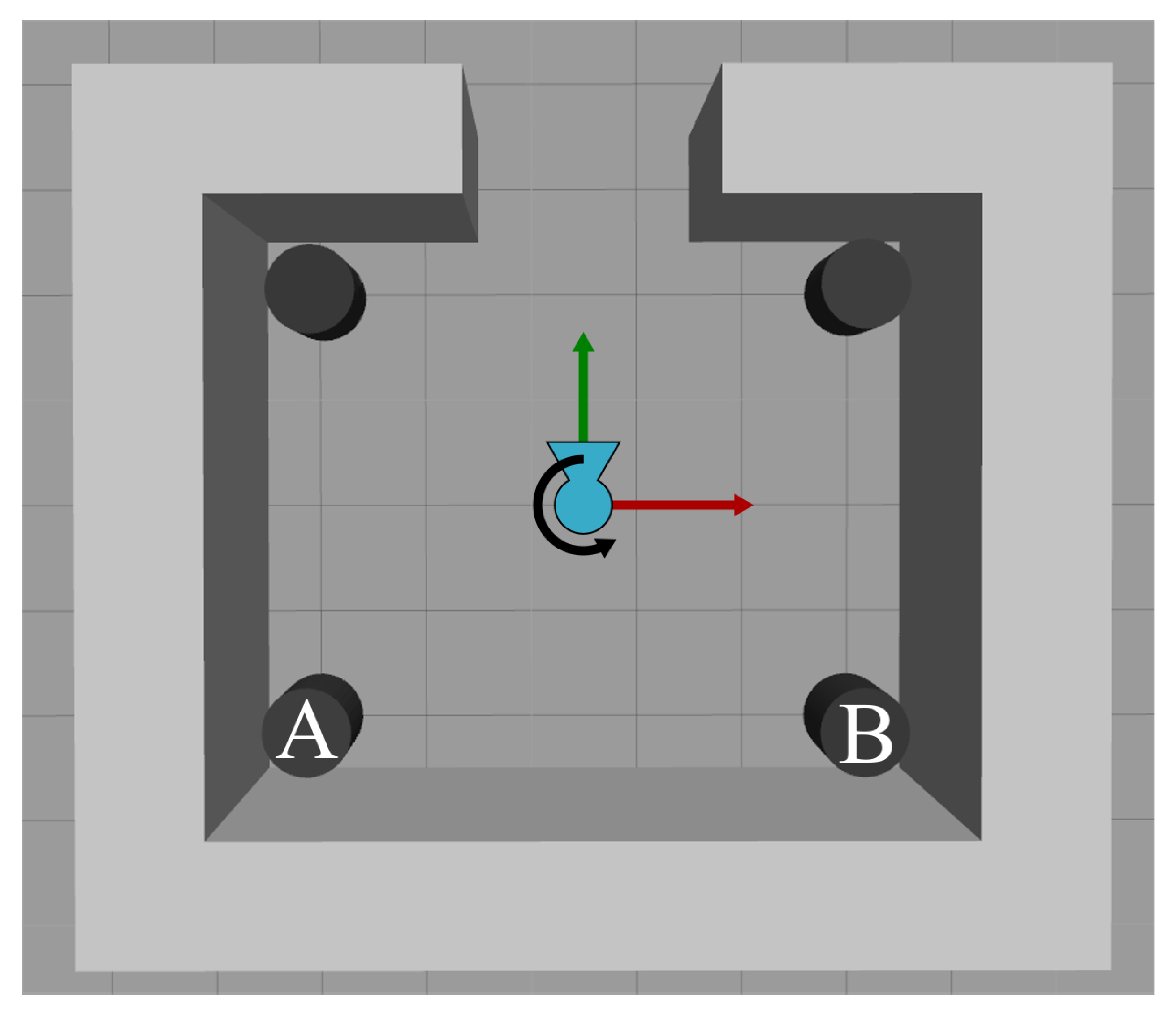
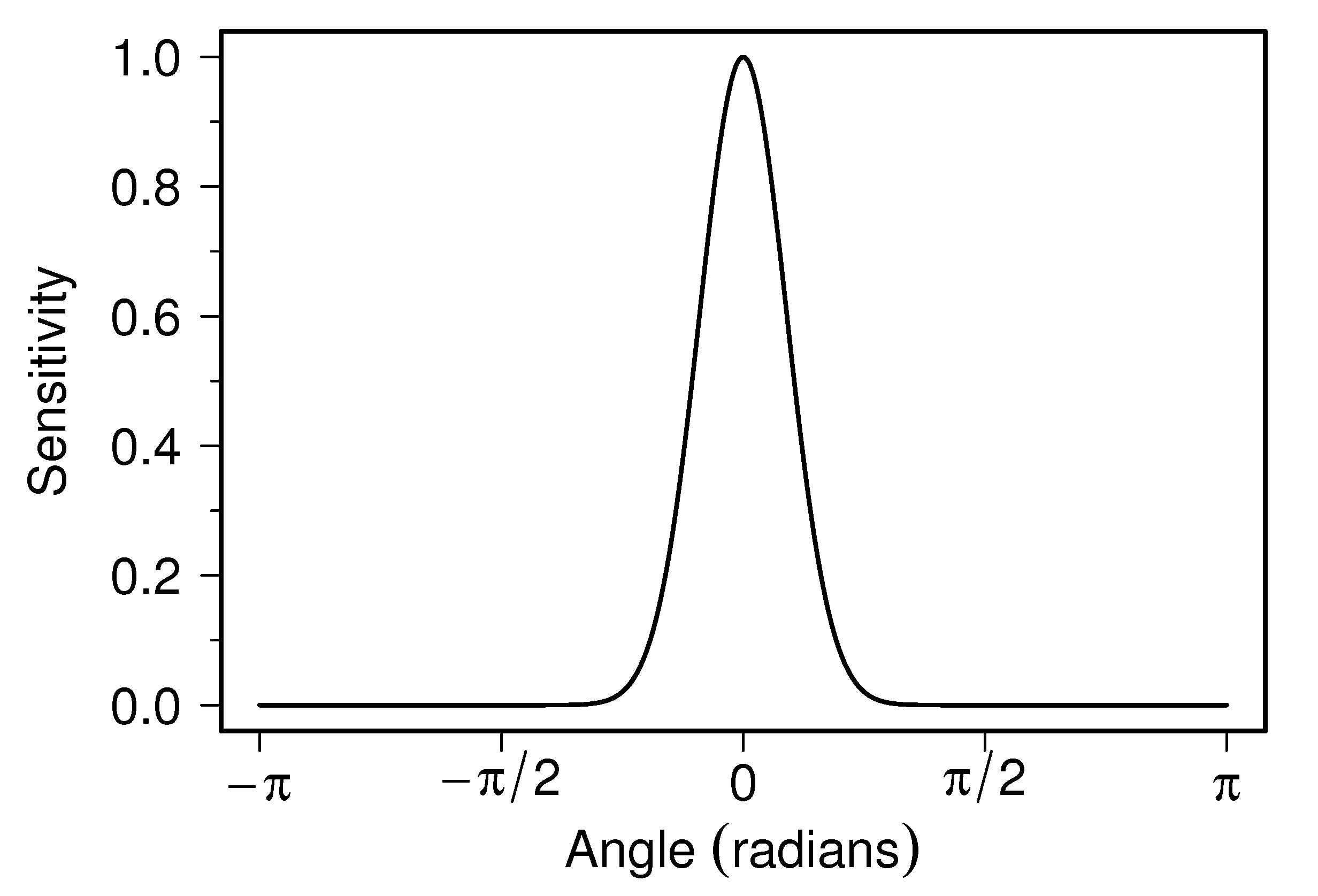
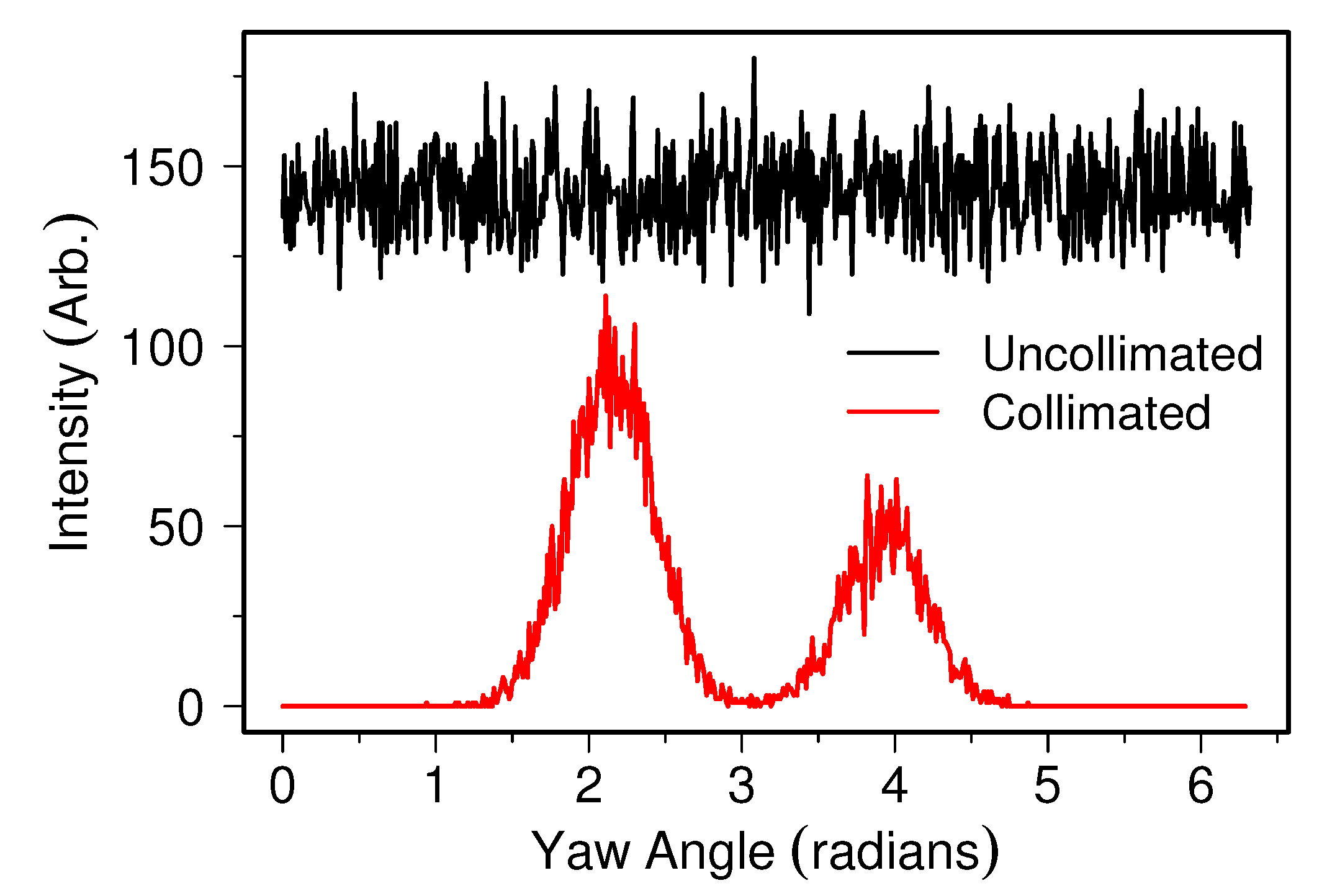
3.3. Detector Collimation Using Sensitivity Functions
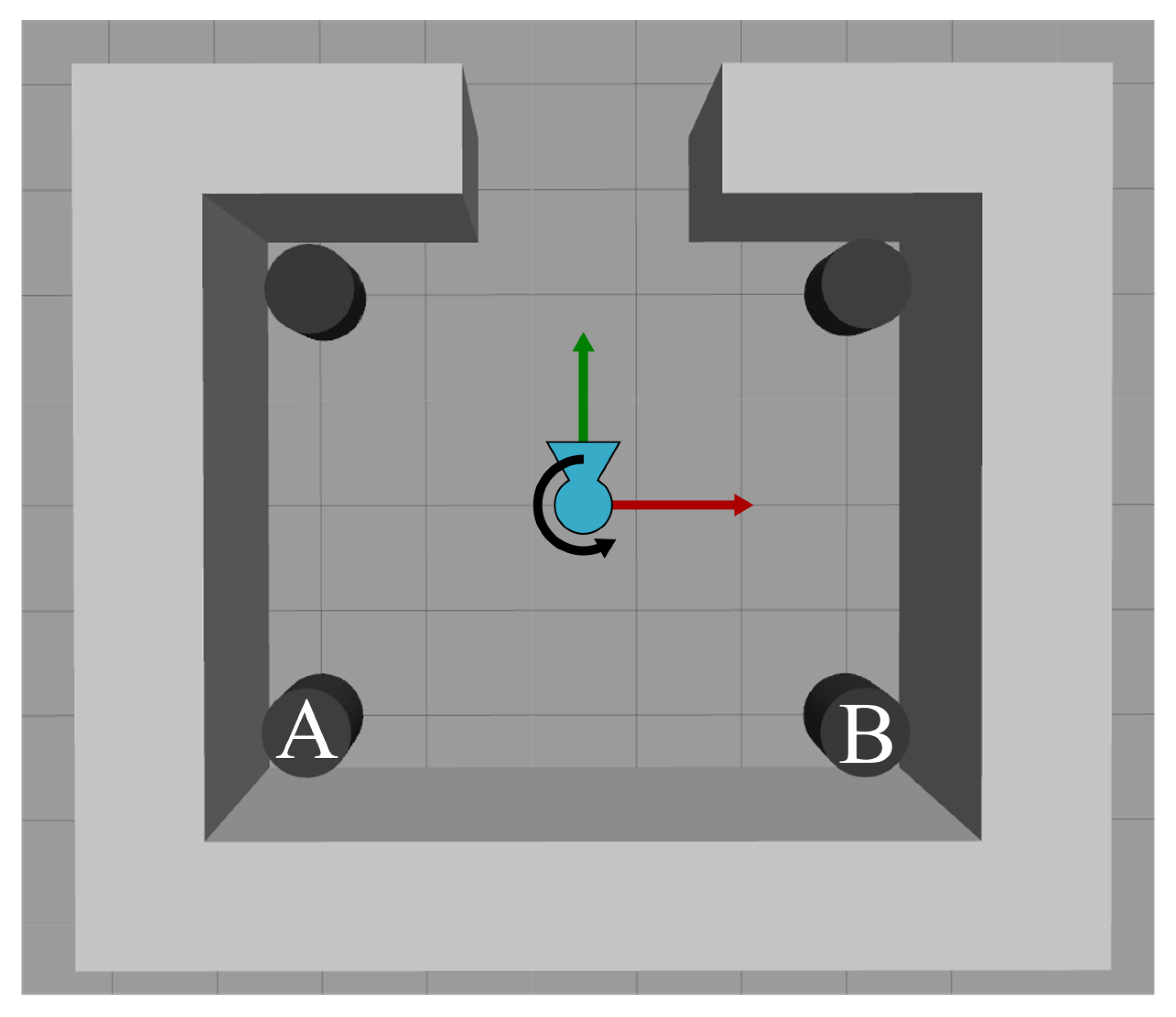
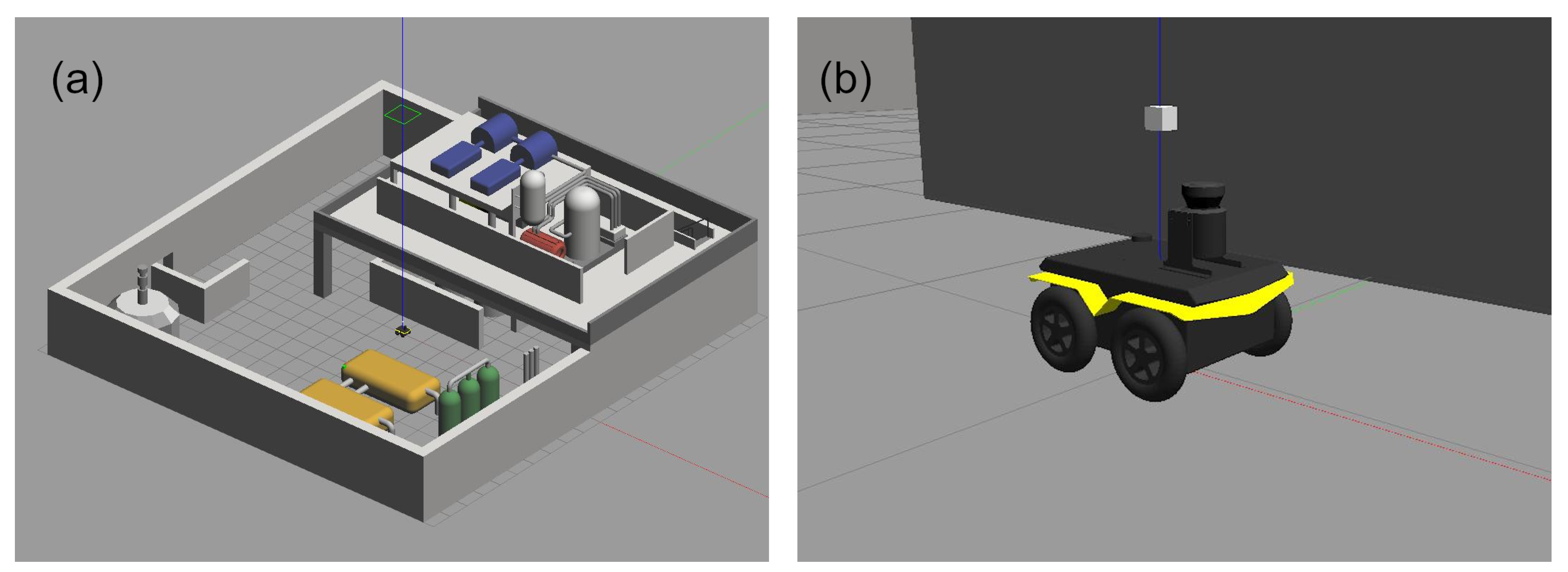
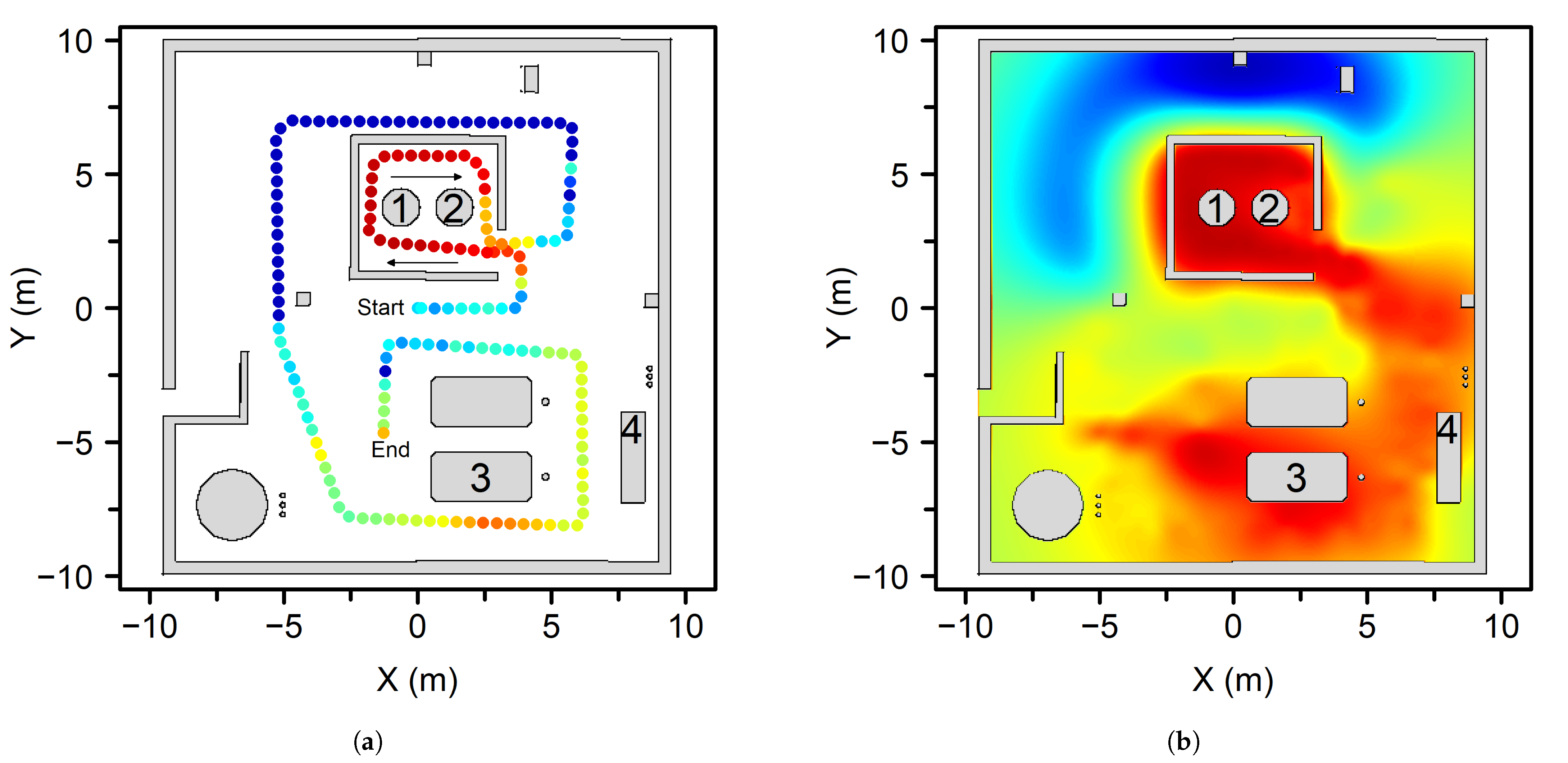
3.4. Integration with Robots in Complex Environments
4. Discussion
4.1. Limitations of Current Implementation of Radiation
4.2. Modelled Nuclear Environments and Challenges
4.2.1. NNUF-HR Drum Store Demonstrator
4.2.2. UKAEA CCFE Drum Store
4.2.3. Sellafield Ltd. Inspection Challenge
4.3. World Builder Tools
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Trevelyan, J.; Hamel, W.R.; Kang, S.C. Robotics in Hazardous Applications. In Springer Handbook of Robotics; Springer International Publishing: Berlin, Germany, 2016; pp. 1521–1548. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Bird, B.; Griffiths, A.; Martin, H.; Codres, E.; Jones, J.; Stancu, A.; Lennox, B.; Watson, S.; Poteau, X. Radiological Monitoring of Nuclear Facilities: Using the Continuous Autonomous Radiation Monitoring Assistance Robot. IEEE Rob. Autom. Mag. 2018, 1. [Google Scholar] [CrossRef]
- Sellafield Ltd. The 2017/18 Technology Development and Delivery Summary; Crown: London, UK, 2018. [Google Scholar]
- West, A.; Tsitsimpelis, I.; Licata, M.; Jazbec, A.; Snoj, L.; Joyce, M.; Lennox, B. Use of Gaussian Process Regression for Radiation Mapping of a Nuclear Reactor with a Mobile Robot. Sci. Rep. 2021. [Google Scholar] [CrossRef]
- Groves, K.; West, A.; Gornicki, K.; Watson, S.; Carrasco, J.; Lennox, B. MallARD: An Autonomous Aquatic Surface Vehicle for Inspection and Monitoring of Wet Nuclear Storage Facilities. Robotics 2019, 8, 47. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Hutson, C.; Knighton, J.; Herrmann, G.; Scott, T. Radiation Tolerance Testing Methodology of Robotic Manipulator Prior to Nuclear Waste Handling. Front. Robot. AI 2020, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aitken, J.M.; Veres, S.M.; Shaukat, A.; Gao, Y.; Cucco, E.; Dennis, L.A.; Fisher, M.; Kuo, J.A.; Robinson, T.; Mort, P.E. Autonomous Nuclear Waste Management. IEEE Intell. Syst. 2018, 33, 47–55. [Google Scholar] [CrossRef] [Green Version]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M.; et al. Gamma-ray irradiation test of electric components of rescue mobile robot Quince. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–15 November 2011. [Google Scholar] [CrossRef]
- Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics 2020, 9, 94. [Google Scholar] [CrossRef]
- Ohashi, H.; Inaba, Y.; Nishihara, T.; Inagaki, Y.; Takeda, T.; Hayashi, K.; Katanishi, S.; Takada, S.; Ogawa, M.; Shiozawa, S. Performance test results of mock-up test facility of httr hydrogen production system. J. Nucl. Sci. Technol. 2004, 41, 385–392. [Google Scholar] [CrossRef]
- Kwon, K.C.; Song, S.J.; Park, W.M.; Lyu, S.P. The real-time functional test facility for advanced instrumentation and control in nuclear power plants. IEEE Trans. Nucl. Sci. 1999, 46, 92–99. [Google Scholar] [CrossRef]
- Kawabata, K.; Mori, F.; Shirasaki, N.; Tanifuji, Y.; Hanari, T. Towards enhancement of test facilities for supporting nuclear decommissioning by remote technology. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017. [Google Scholar] [CrossRef]
- Nancekievill, M.; Watson, S.; Green, P.R.; Lennox, B. Radiation Tolerance of Commercial-Off-The-Shelf Components Deployed in an Underground Nuclear Decommissioning Embedded System. In Proceedings of the 2016 IEEE Radiation Effects Data Workshop (REDW), Portland, OR, USA, 11–15 July 2016. [Google Scholar] [CrossRef]
- Schneider, F.E.; Welle, J.; Wildermuth, D.; Ducke, M. Unmanned multi-robot CBRNE reconnaissance with mobile manipulation System description and technical validation. In Proceedings of the 13th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 28–31 May 2012. [Google Scholar] [CrossRef]
- von Frankenberg, F.; McDougall, R.; Nokleby, S.; Waller, E. A Mobile Robotic Platform for Generating Radiation Maps. In Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 407–416. [Google Scholar] [CrossRef]
- Guzman, R.; Navarro, R.; Ferre, J.; Moreno, M. RESCUER: Development of a Modular Chemical, Biological, Radiological, and Nuclear Robot for Intervention, Sampling, and Situation Awareness. J. Field Robot. 2015, 33, 931–945. [Google Scholar] [CrossRef]
- Sharp, A.; Kruusamae, K.; Ebersole, B.; Pryor, M. Semiautonomous dual-arm mobile manipulator system with intuitive supervisory user interfaces. In Proceedings of the 2017 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Austin, TX, USA, 8–10 March 2017. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; West, A.; Licata, M.; Aspinall, M.D.; Jazbec, A.; Snoj, L.; Martin, P.A.; Lennox, B.; Joyce, M.J. Simultaneous, Robot-Compatible γ-Ray Spectroscopy and Imaging of an Operating Nuclear Reactor. IEEE Sens. J. 2021, 21, 5434–5443. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004. [Google Scholar] [CrossRef] [Green Version]
- Stepney, S.; Polack, F.A. Engineering Simulations as Scientific Instruments: A Pattern Language; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Robotics Challenge 2017. Available online: https://www.iaea.org/topics/safeguards-in-practice/robotics-challenge-2017 (accessed on 25 June 2021).
- European Robotics. ENRICH—The European Robotics Hackathon. Available online: https://enrich.european-robotics.eu/ (accessed on 25 June 2021).
- FIS 360. Game Changers Challenges. Available online: https://www.gamechangers.technology/challenge (accessed on 25 June 2021).
- Fukushima Innovation Coast Initiative Promotion Organization. Fukushima Robot Test Field [Japanese]. Available online: https://www.fipo.or.jp/robot/overview (accessed on 25 June 2021).
- Bagatin, M. Ionizing Radiation Effects in Electronics: From Memories to Imagers; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar] [CrossRef]
- George, J.S. An overview of radiation effects in electronics. In AIP Conference Proceedings; American Institute of Physics Inc.: College Park, MD, USA, 2019; Volume 2160, p. 060002. [Google Scholar] [CrossRef]
- Kawatsuma, S.; Fukushima, M.; Okada, T. Emergency response by robots to Fukushima-Daiichi accident: Summary and lessons learned. Ind. Robot. Int. J. 2012, 39, 428–435. [Google Scholar] [CrossRef]
- Wu, Y. CLEAR-S: An integrated non-nuclear test facility for China lead-based research reactor. Int. J. Energy Res. 2016, 40, 1951–1956. [Google Scholar] [CrossRef] [Green Version]
- Kawabata, K.; Suzuki, K.; Isowa, M.; Horiuchi, K.; Ito, R. Development of a robot simulation system for remotely operated robots for operator proficiency training and robot performance verification. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 28 June–1 July 2017. [Google Scholar] [CrossRef]
- Kawabata, K.; Suzuki, K. Development of a Robot Simulator for Remote Operations for Nuclear Decommissioning. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR) IEEE, Jeju, Korea, 24–27 June 2019. [Google Scholar] [CrossRef]
- Michel, O. Webots: Symbiosis between virtual and real mobile robots. In Lecture Notes in Computer Science; Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics; Springer: Berlin/Heidelberg, Germany, 1998; Volume 1434, pp. 254–263. [Google Scholar] [CrossRef]
- Rohmer, E.; Singh, S.P.N.; Freese, M. CoppeliaSim (formerly V-REP): A Versatile and Scalable Robot Simulation Framework. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Noori, F.M.; Portugal, D.; Rocha, R.P.; Couceiro, M.S. On 3D simulators for multi-robot systems in ROS: MORSE or Gazebo? In Proceedings of the SSRR 2017 15th IEEE International Symposium on Safety, Security and Rescue Robotics, Shanghai, China, 11–13 October 2017; pp. 19–24. [Google Scholar] [CrossRef]
- Pitonakova, L.; Giuliani, M.; Pipe, A.; Winfield, A. Feature and Performance Comparison of the V-REP, Gazebo and ARGoS Robot Simulators. In Towards Autonomous Robotic Systems; Springer International Publishing: Cham, Switzerland, 2018; pp. 357–368. [Google Scholar] [CrossRef] [Green Version]
- Lavrenov, R.; Zakiev, A. Tool for 3D Gazebo map construction from arbitrary images and laser scans. In Proceedings of the 2017 10th International Conference on Developments in eSystems Engineering (DeSE), Paris, France, 14–16 June 2017; pp. 256–261. [Google Scholar]
- Abbyasov, B.; Lavrenov, R.; Zakiev, A.; Yakovlev, K.; Svinin, M.; Magid, E. Automatic tool for Gazebo world construction: From a grayscale image to a 3D solid model. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 7226–7232. [Google Scholar]
- Connor, D.; Martin, P.G.; Scott, T.B. Airborne radiation mapping: Overview and application of current and future aerial systems. Int. J. Remote Sens. 2016, 37, 5953–5987. [Google Scholar] [CrossRef]
- Knoll, G.F. Radiation Detection and Measurement, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Dehnen, W.; Read, J.I. N-body simulations of gravitational dynamics. Eur. Phys. J. Plus 2011, 126. [Google Scholar] [CrossRef]
- Hubbell, J.; Seltzer, S. Tables of X-ray Mass Attenuation Coefficients and Mass Energy-Absorption Coefficients (Version 1.4). 2004. Available online: http://physics.nist.gov/xaamdi (accessed on 25 June 2021).
- Miller, A.; Machrafi, R.; Mohany, A. Development of a semi-autonomous directional and spectroscopic radiation detection mobile platform. Radiat. Meas. 2015, 72, 53–59. [Google Scholar] [CrossRef] [Green Version]
- Machado, D.M.; Cotelli, A.; Galvão, D.; Mól, A.C.; Carvalho, P.V.; Vidal, M.C.R. Use Dosimetry Virtual Tool for Security Studies Physics and Nuclear. Procedia Manuf. 2015, 3, 1765–1771. [Google Scholar] [CrossRef]
- Bridgwater, T.; Giuliani, M.; van Maris, A.; Baker, G.; Winfield, A.; Pipe, T. Examining Profiles for Robotic Risk Assessment. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction ACM, Cambridge, UK, 24–26 March 2020. [Google Scholar] [CrossRef] [Green Version]
- West, C.; Arvin, F.; Cheah, W.; West, A.; Watson, S.; Giuliani, M.; Lennox, B. A Debris Clearance Robot for Extreme Environments. In Towards Autonomous Robotic Systems; Springer International Publishing: Cham, Switzerland, 2019; pp. 148–159. [Google Scholar] [CrossRef]
- Baca, T.; Jilek, M.; Manek, P.; Stibinger, P.; Linhart, V.; Jakubek, J.; Saska, M. Timepix Radiation Detector for Autonomous Radiation Localization and Mapping by Micro Unmanned Vehicles. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar] [CrossRef]
- Marques, L.; Vale, A.; Vaz, P. State-of-the-Art Mobile Radiation Detection Systems for Different Scenarios. Sensors 2021, 21, 1051. [Google Scholar] [CrossRef]
- Groves, K.; Hernandez, E.; West, A.; Wright, T.; Lennox, B. Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation. Robotics 2021, 10, 78. [Google Scholar] [CrossRef]
- Werner, C.J.; Bull, J.S.; Solomon, C.J.; Brown, F.B.; McKinney, G.W.; Rising, M.E.; Dixon, D.A.; Martz, R.L.; Hughes, H.G.; Cox, L.J.; et al. MCNP Version 6.2 Release Notes. In Technical Report LA-UR-18-20808; Los Alamos National Laboratory: Los Alamos, NM, USA, 2018. [Google Scholar]
- Werner, C.J. (Ed.) MCNP Users Manual-Code Version 6.2. In Technical Report LA-R-17-29981; Los Alamos National Laboratory: Los Alamos, NM, USA, 2017. [Google Scholar]
- Connor, D.T.; Wood, K.; Martin, P.G.; Goren, S.; Megson-Smith, D.; Verbelen, Y.; Chyzhevskyi, I.; Kirieiev, S.; Smith, N.T.; Richardson, T.; et al. Radiological Mapping of Post-Disaster Nuclear Environments Using Fixed-Wing Unmanned Aerial Systems: A Study From Chornobyl. Front. Robot. AI 2020, 6. [Google Scholar] [CrossRef] [Green Version]
- Ardiny, H.; Witwicki, S.; Mondada, F. Autonomous Exploration for Radioactive Hotspots Localization Taking Account of Sensor Limitations. Sensors 2019, 19, 292. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Terasaka, Y.; Utsugi, W.; Kikuchi, H.; Kiyooka, H.; Torii, T. Radiation imaging using a compact Compton camera mounted on a crawler robot inside reactor buildings of Fukushima Daiichi Nuclear Power Station. J. Nucl. Sci. Technol. 2019, 56, 801–808. [Google Scholar] [CrossRef]
- Szőke, I.; Louka, M.N.; Bryntesen, T.R.; Bratteli, J.; Edvardsen, S.T.; RøEitrheim, K.K.; Bodor, K. Real-time 3D radiation risk assessment supporting simulation of work in nuclear environments. J. Radiol. Prot. 2014, 34, 389–416. [Google Scholar] [CrossRef] [Green Version]
- Caracena, T.M.; Goncalves, J.G.M.; Peerani, P.; Vidal, E.V. A Variable Point Kernel Dosimetry Method for Virtual Reality Simulation Applications in Nuclear Safeguards and Security. IEEE Trans. Nucl. Sci. 2013, 60, 3862–3871. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Liu, Y.; Peng, M.; Ayodeji, A.; Chao, N. Voxel-based point kernel method for dose rate assessment of non-uniform activity and self-shielding sources in nuclear facility decommissioning. Radiat. Phys. Chem. 2019, 164, 108381. [Google Scholar] [CrossRef]
- Jazbec, A.; Kos, B.; Ambrožič, K.; Snoj, L. Dose rate calculations at beam tube no. 5 of the JSI TRIGA mark II research reactor using Monte Carlo method. Appl. Radiat. Isot. 2021, 168, 109510. [Google Scholar] [CrossRef]
- Agostinelli, S.; Allison, J.; Amako, K.; Apostolakis, J.; Araujo, H.; Arce, P.; Asai, M.; Axen, D.; Banerjee, S.; Barrand, G.; et al. Geant4—A simulation toolkit. Nucl. Instrum. Meth. A 2003, 506, 250–303. [Google Scholar] [CrossRef] [Green Version]
- Baranoski, G.V.; Krishnaswamys, A. Light & Skin Interactions: Simulations for Computer Graphics Applications; Morgan Kaufmann Publishers: Burlington, MA, USA, 2010. [Google Scholar]
- National Nuclear Users Facility. Hot Robotics Facility. Available online: https://www.nnuf.ac.uk/hot-robotics (accessed on 25 June 2021).
- Vetter, K.; Barnowski, R.; Cates, J.W.; Haefner, A.; Joshi, T.H.; Pavlovsky, R.; Quiter, B.J. Advances in Nuclear Radiation Sensing: Enabling 3-D Gamma-Ray Vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, S.; Newman, M.; Coombs, D.; Witts, D. JET experience on managing radioactive waste and implications for ITER. Fusion Eng. Des. 2016, 109–111, 979–985. [Google Scholar] [CrossRef]
- Chapman, I.T.; Morris, A.W. UKAEA capabilities to address the challenges on the path to delivering fusion power. Philos. Trans. R. Soc. A 2019, 377, 20170436. [Google Scholar] [CrossRef]
- Bell, A.C.; Williams, J.; Neilson, J.D.; Perevezentsev, A. Detritiation Processes Needed for JET Operation and Their Wider Applicability. Fusion Sci. Technol. 2002, 41, 626–631. [Google Scholar] [CrossRef]
- Bayram, H. Remote Inspection Working Group (RIWG) Trials in Drummed Waste Store. Available online: https://rainhub.org.uk/remote-inspection-working-group-riwg-trials-in-drummed-waste-store/ (accessed on 25 June 2021).
- Nuclear Decommissioning Authority. Nuclear Decommissioning Authority Annual Report and Accounts 2017/18; Dandy Booksellers Ltd.: London, UK, 2018. [Google Scholar]
- Nuclear Decommissioning Authority. Nuclear Decommissioning Authority Strategy: Strategy Effective from April 2016; The Stationery Office: London, UK, 2016. [Google Scholar]
- Nuclear Decommissioning Authority. The Nuclear Decommissioning Authority: Progress with Reducing Risk at Sellafield; National Audit Office: London, UK, 2018. [Google Scholar]
- Sellafield Ltd. Cleaning Up Sellafield: Annual Review 2017/18. Available online: https://www.gov.uk/government/publications/sellafield-ltd-publishes-201718-annual-review-of-performance (accessed on 25 June 2021).
- Sellafield Ltd. Annual Review of Performance 2016/17. Available online: https://www.gov.uk/government/publications/annual-review-of-performance-201617 (accessed on 25 June 2021).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wright, T.; West, A.; Licata, M.; Hawes, N.; Lennox, B. Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges. Robotics 2021, 10, 86. https://doi.org/10.3390/robotics10030086
Wright T, West A, Licata M, Hawes N, Lennox B. Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges. Robotics. 2021; 10(3):86. https://doi.org/10.3390/robotics10030086
Chicago/Turabian StyleWright, Thomas, Andrew West, Mauro Licata, Nick Hawes, and Barry Lennox. 2021. "Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges" Robotics 10, no. 3: 86. https://doi.org/10.3390/robotics10030086
APA StyleWright, T., West, A., Licata, M., Hawes, N., & Lennox, B. (2021). Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges. Robotics, 10(3), 86. https://doi.org/10.3390/robotics10030086