1. Introduction
People with disabilities often work beneath their capabilities inducing a dissatisfaction with their occupation, as they feel a lack of self-fulfillment. The project “Next-Generation—Develop inclusive work with flexible robot solutions” has the goal of supporting and enhancing the individual work capabilities through innovative technology. In consequence, people with disabilities will be considered a part of the primary labour market and will be recognized as valuable members of the working community and society. To reach this goal, industrial workplaces must be adapted individually according to the physical and cognitive abilities of disabled people. The idea is to implement human–robot collaboration (HRC) into workplaces. The main purpose of the collaborative robot is to support the human, enabling them to accomplish work tasks regardless of their physical impairments. HRC is introduced as a new assistive technology for people with disabilities to provide physical assistance. An assistive technology is only helpful if it is adapted to the individual’s needs. Therefore, task allocation between humans and robots is a central aspect for the design and programming process of the HRC workplace. For people with disabilities the allocation needs to be based on their individual capabilities. Consequently, a method is required to identify the workload of tasks, in which a particular person might be overloaded and needs to be assisted and supported by a collaborative robot.
The required method is aimed in particular for people with musculo-skeletal disorders that influence motor skills, coordination and/or muscle movements. On the other hand, the target group posses good hearing, vision and speech comprehension. To take the requirements of the general labor market into account, further abilities must nevertheless be assumed. These are giving goal-oriented instructions or working in a goal-oriented manner. Further skills are implementation of learned knowledge, orientation in time and place as well as the ability to respect work safety measures.
Based on Fitts’ list [
1], the capabilities of machines are speed, power, computation, replication, simultaneous operations and short term memory. Additionally, robots are kown for their accuracy, endurance and low quality variations in manufactured products. Dependent on the attached robot equipment, a robot has added capabilities. For example, vision systems add the possibility to recognize and to percept the sorroundig world. Force sensors can detect contacts or control process forces and capacitive sensor skins are able to contactlessly detect collisions with other objects.
An instrument for occupational rehabilitation and integration is the Integration of People with Disabilities into the Working Life (
IMBA) method. The respective method documents and compares workplace requirements and individual human capabilities based on standardized motion characteristics and further aspects of working routines. By means of comparison, the workload of a particular person is identified [
2]. Even though the
IMBA method provides a detailed determination of individual workloads, it is not suited for the individual capability-based task allocation in this project. The reason for this is that this method evaluates the overall workplace without specifying the participants’ qualification for each specific task. Employing
IMBA on every single task is inefficient, because not every task requires a standardized characteristic.
In research, task allocation for human–robot collaboration has gained importance. In this context, a superordinated question is the definition of criteria to base the task allocation on. One way is to consider the allocation from an economic point of view, as done by Takata et al. in [
3]. They evaluate tasks according to cost and time. Furthermore, their method incorporates possible changes in the overall process. Müller et al. [
4] on the other hand present a process-oriented task allocation. This allocation is based on a weighted comparison between general human and robot capabilities regarding the requirements of the product and manufacturing process. Fechter et al. [
5] and Ranz et al. [
6] also derive the allocation based on the capabilities of the stakeholders of the HRC system. Fechter et al. only consider the capabilities of the robot and the automation of the tasks [
5]. Ranz et al., on the contrary, base their allocation on the best fit between task requirements and the capabilities of the stakeholders. A disadvantage of the approaches presented in [
4,
5,
6] is that general human capabilities are taken into account instead of individual ones belonging to a particular person.
These examples show that approaches for defining task allocation for HRC exist, but they are either cost-, time- or process-orientated. Furthermore, they consider only general human capabilities, which cannot be used to make a statement about the amount of assistance that an individual requires. Therefore, these approaches cannot be applied to prepare design and programming of individually adapted, inclusive HRC workplaces. This paper introduces a new approach that bases task allocation on the individual human being with their capabilities and compares them with the specific requirements of a given task. Result of this comparison is the amount of assistance, which should be provided by a collaborative robot.
The paper focuses on the description, functionality and structure of the new approach respectievly method. In
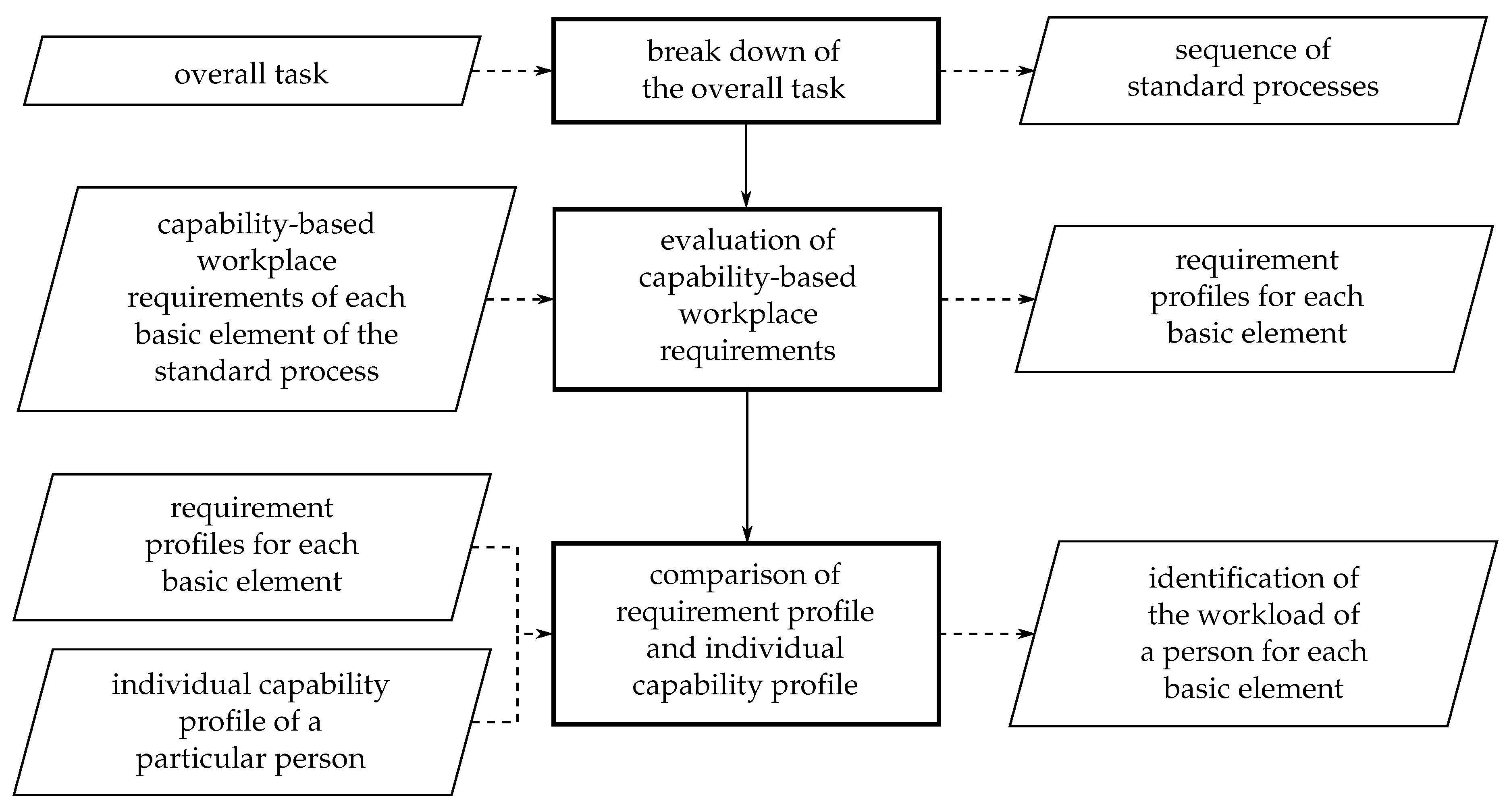
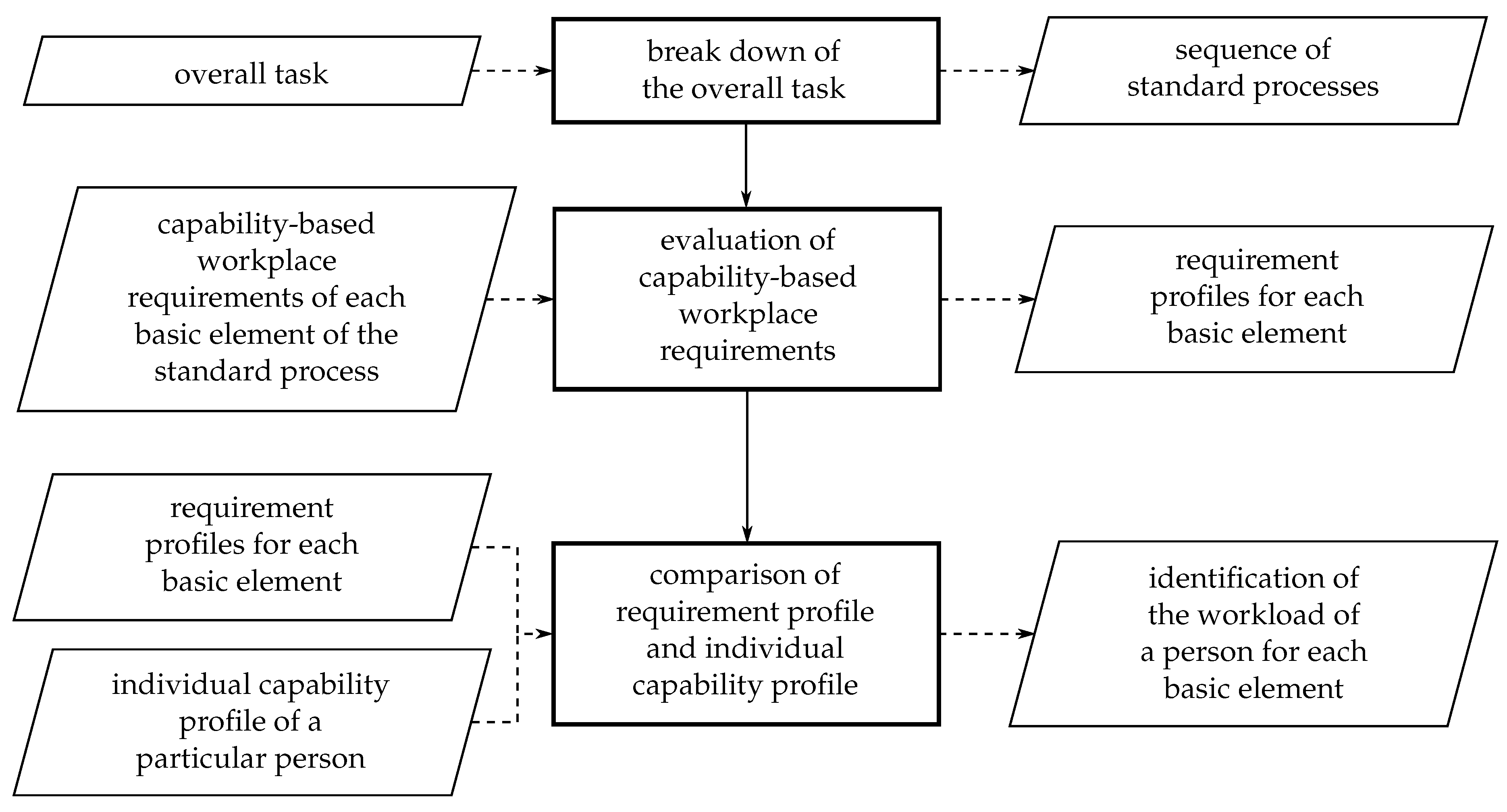
Section 2, the proposed method for an individual capability-based task allocation and the determination of the amount of robotic support is explained.
Section 3 discusses the results of the proposed method on the basis of an anonymized paticipant and an exemplary application. The paper is concluded in
Section 4 and presents future aspects, which should be investigated in the project.
3. Results and Discussion
The results of the method presented are discussed on the basis of an exemplary application provided by an industrial company and on the basis of an individual skill profile of an anonymized participant. Finally, the concept of the human–robot workplace derived from this is presented, see
Figure 8.
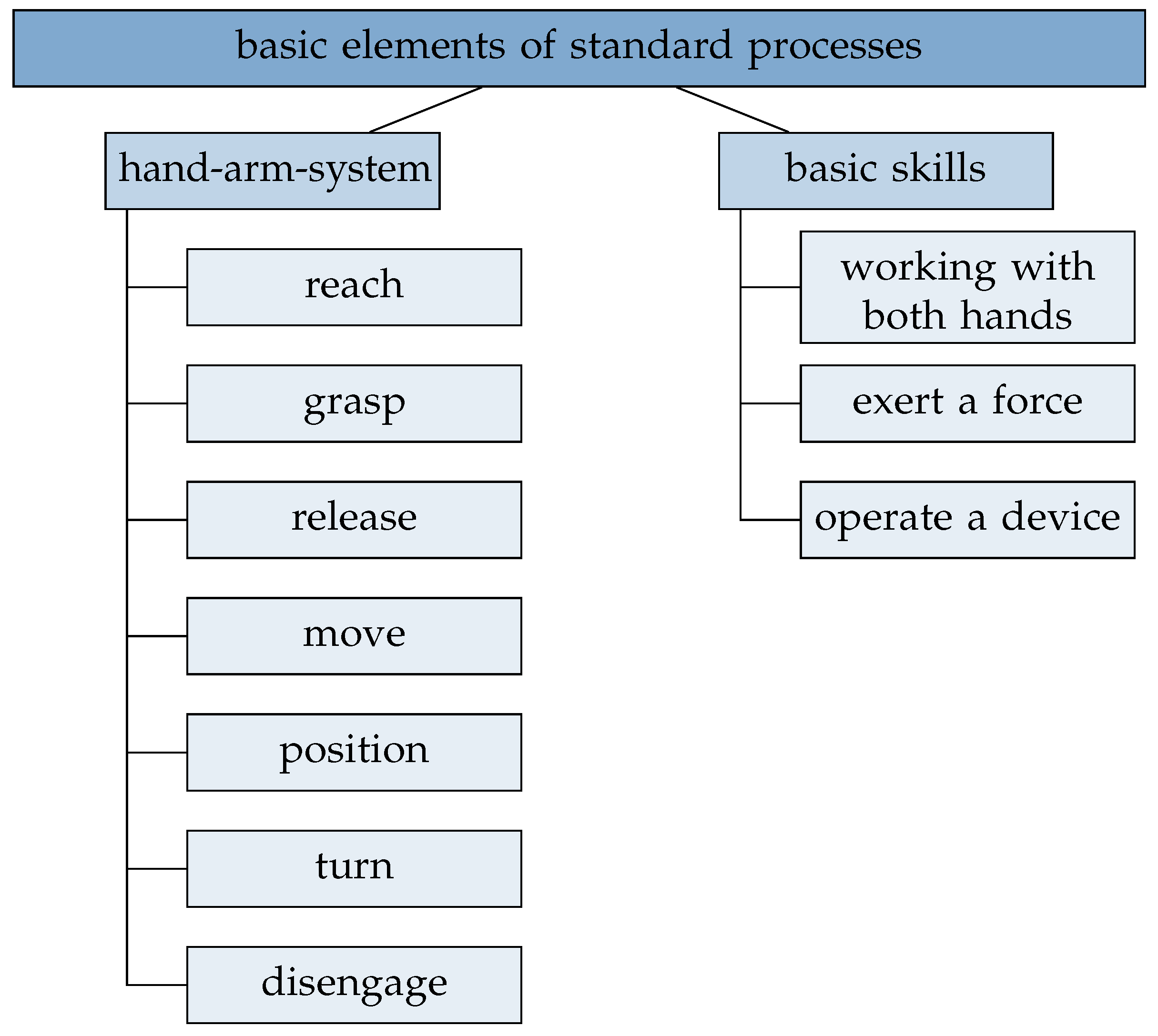
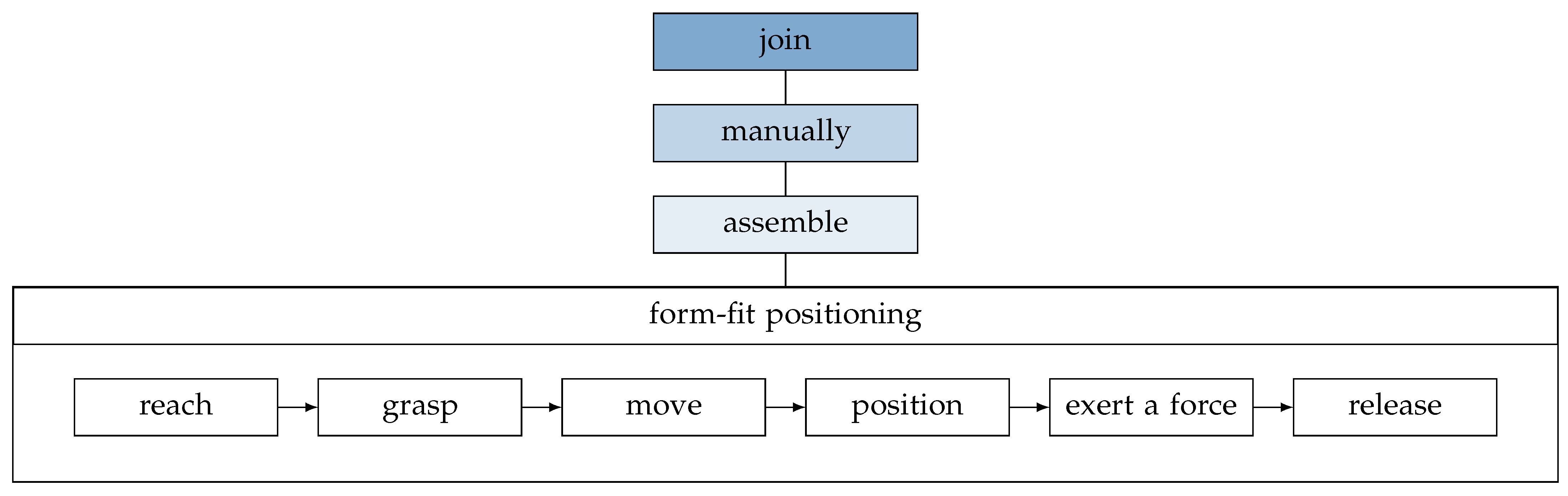
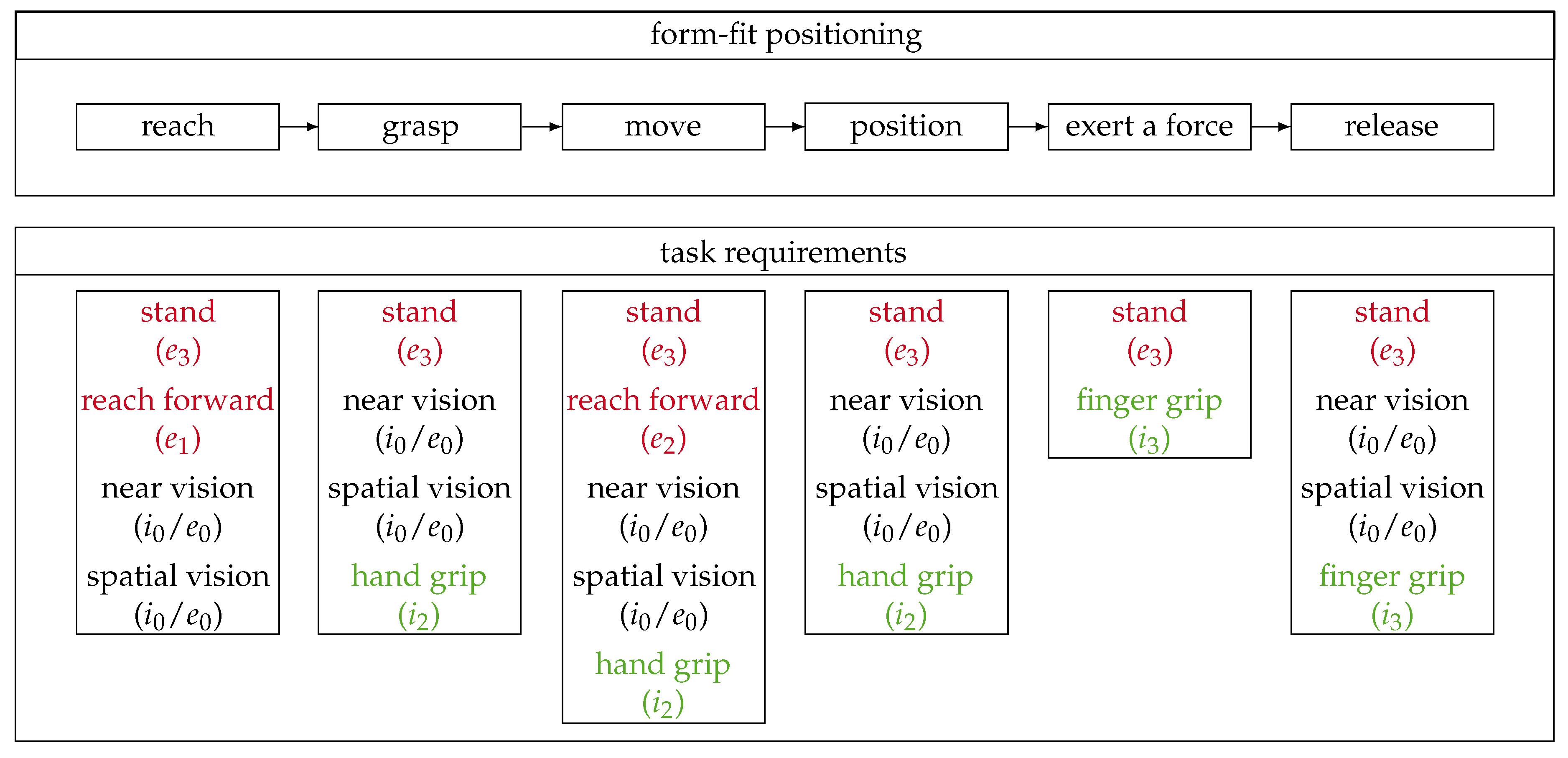
During the task, metal sheets must be inserted into a fixture to load a resistance welding machine. The standard process “form-fit positioning” is part of the overall task and is already shown in
Figure 4. Thus, the required basic elements are defined.
The profile comparison with the individual capability profile of the participant shows, that the person cannot stand due to its disability and is therefore strongly overstrained. In this case, a robot assistance system cannot reduce the overload for obvious reasons. Accordingly, a height-adjustable workplace is necessary to enable the participant in a wheelchair to perform the task. In addition, the participant is overloaded with the task of “reaching forward”. This is required for the basic elements “reach out” and “bring”. In this case, the assistance of a robot capable of HRC is needed to overcome the high workload of the participant.
The requirements “near vision” and “spatial vision”, which are necessary for all capabilities of the standard process “form-fit positioning” excluding “exert a force”, are sufficiently fulfilled by the participant, resulting in an average workload. Therefore, no support is required. Noteworthy is that most of the participants have sufficient vision capabilities. This is why, visual quality checks on produced parts should be considered as additional tasks alongside the assembly tasks.
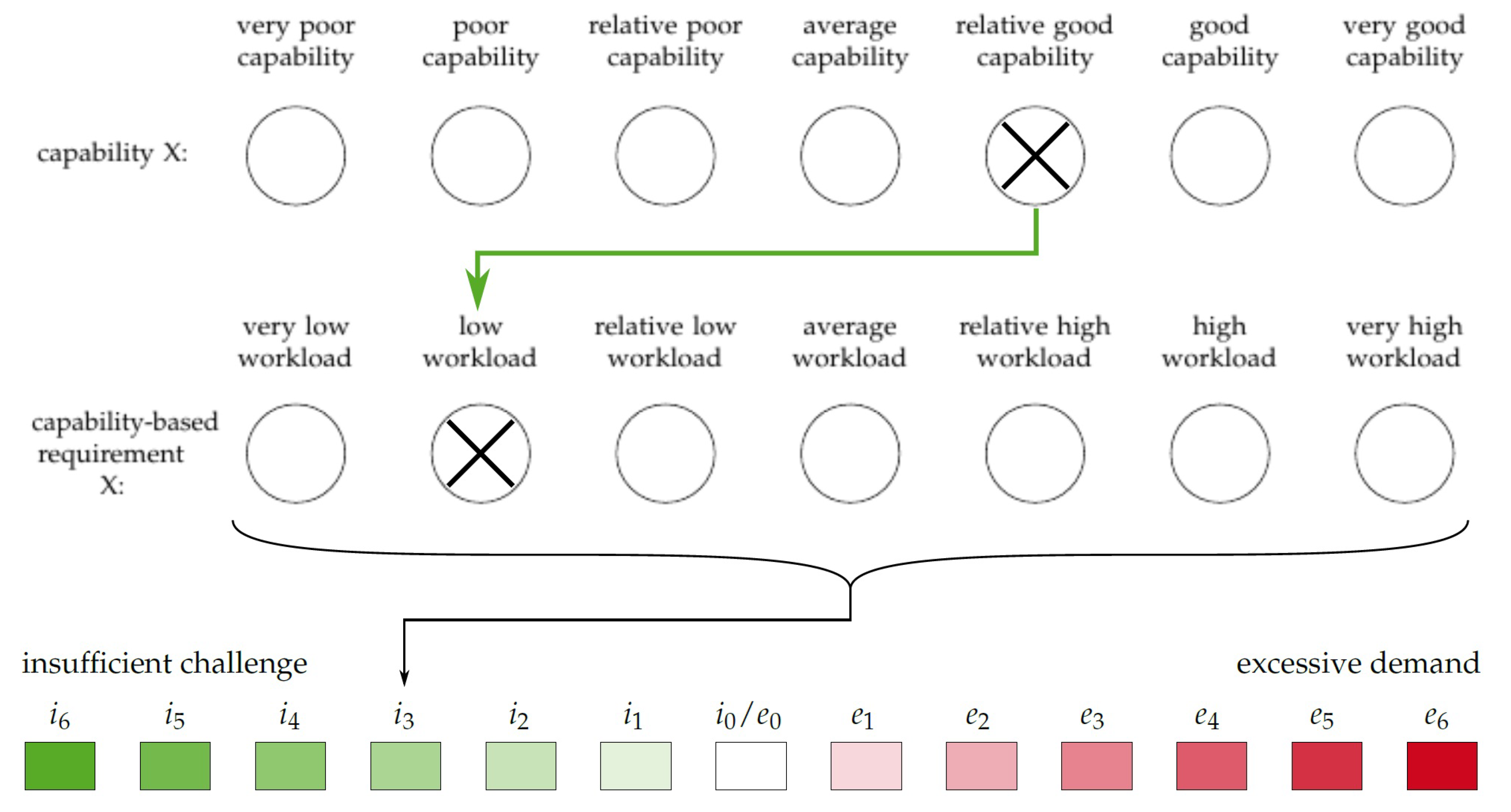
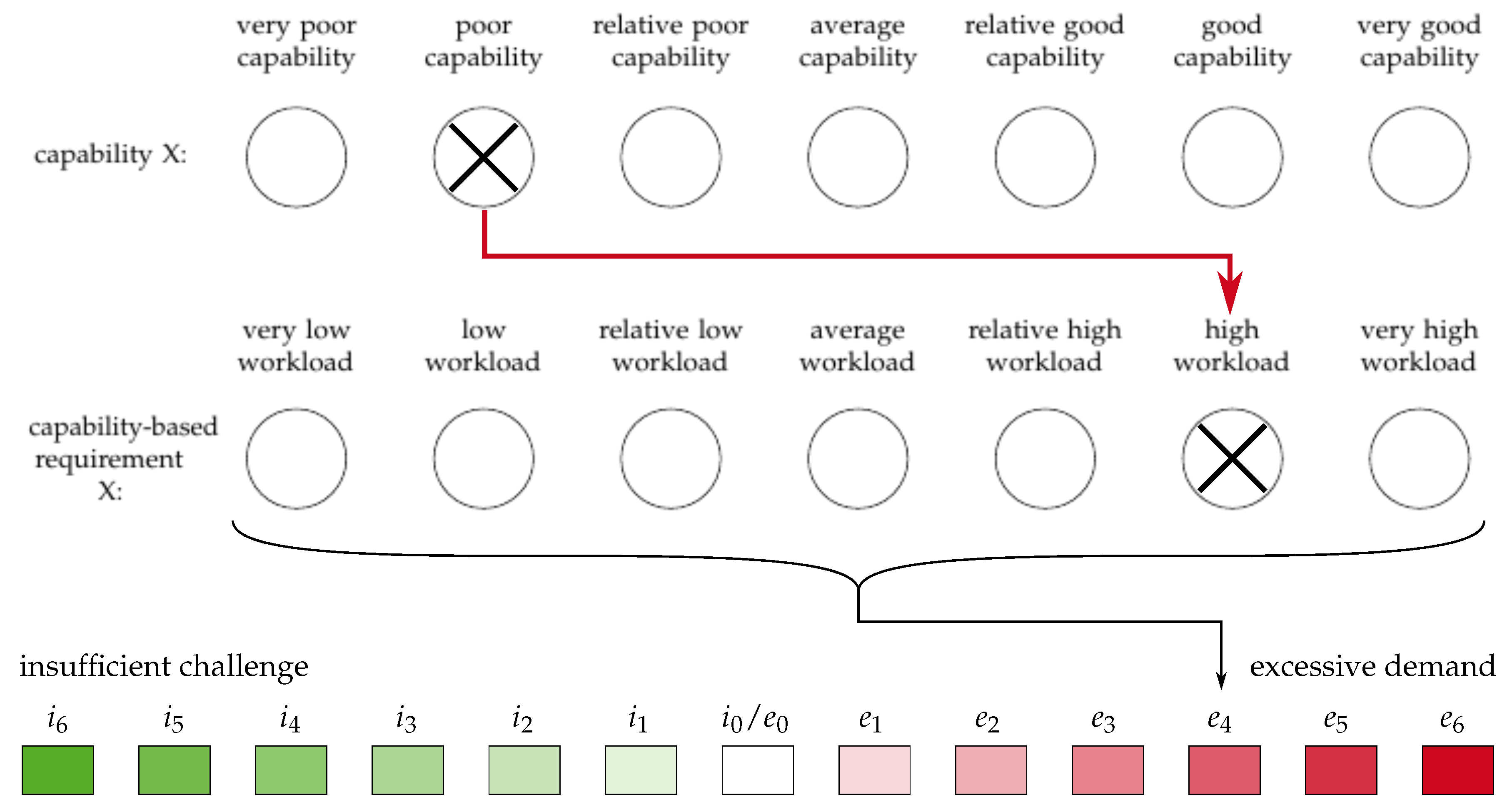
Finally, the requirements that cause the participant to be under challenged are listed. These mostly include one-sided “hand grip” and “finger grip” and are needed for all basic elements except “reach”. Requirements, in which a person is insufficiently challenged, have to be evaluated individually. In these cases, a collaborative robot could be used as an assistive device. The level of insufficient challenge and mental state of an individual is crucial. A requirement that is insufficiently challenging physically could still be difficult mentally. Basis for this decision is always self-actualization and satisfaction of the individual. At the moment, capability- based requirements, in which the person is insufficiently challenged, are planned to be executed by the participant. The results of the profile comparison for the standard process “form-fit positioning” are summarized in
Figure 8.
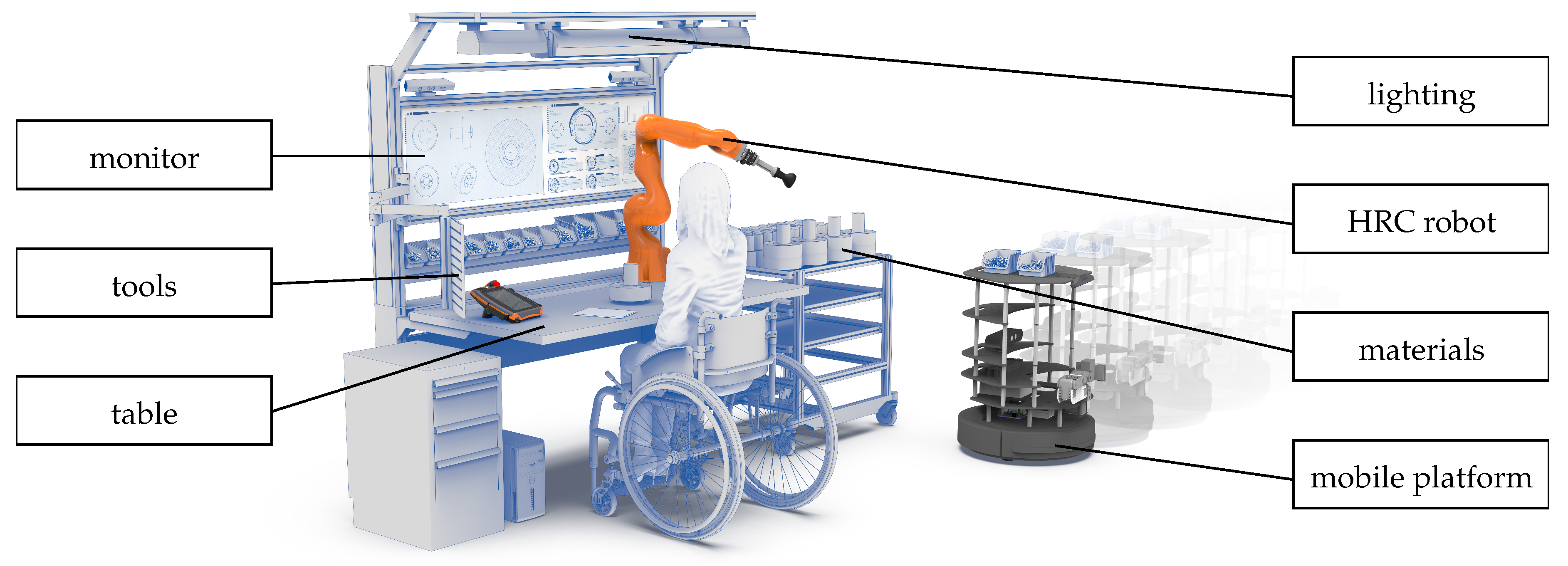
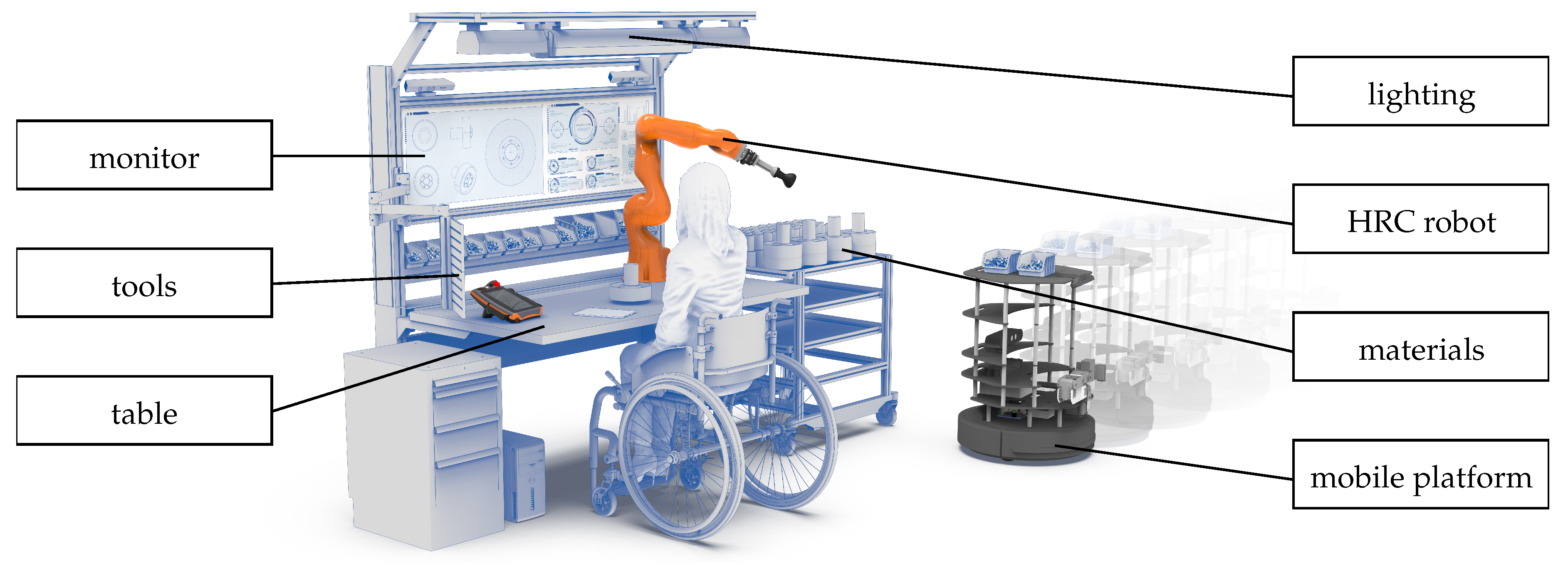
In addition to the listed requirements, the workplace should be designed in such a way that many different assembly and testing processes can be represented, which are found in industrial applications. Furthermore, the principles of ergonomics should be implemented in the design. For this reason, the present concept results in a workplace based on a typical assembly station consisting of a height-adjustable table, a monitor and lighting as well as fixed places for tools, materials and end products. The participant and the HRC capable robot must have access to tools, materials and storage of the final products. Additionally, a mobile platform can assist by supplying materials to the workplace. The concept is shown in
Figure 9.
4. Conclusions
This paper introduces a novel method for task allocation between people with physical disabillities and collaborative robots. It determines the amount of assistance that an individual requires to fullfill a given task. Robotic assistance is needed whenever a participant is either insufficiently challenged or excessivly demanded. In comparison to similar approaches, this method respects the individual capabilities of a human being and compares them to the specific requirements of a given process. The result is an amount of assistance, which should be provided by the robot for each process requirement. Additionally, this paper presents the concept of an inclusive workplace, which is ergonomically adjustable and accessible to disabled people.
Future work of this project includes the final design and setup of the human–robot workplace for conducting industrial test scenarios based on the shown concept. Furthermore, the programming of the robot has to meet the individual capability profiles of the participant demanding intuitive and modular operation by the participants. When and how much robotic assistance is needed depends on the particular amount of insufficient challenge or excessive demand and remains to be investigated in this project. Based on the individual capabilities, the robot program has to account for different levels of assistance varying between no assistance and full automation. In addition, an unskilled actor must program the workplace for a new individual or task. This results in high requirements on the operability of the workstation and the robotic programm.
Finally, the new method for task allocation has to be validated on more participants and different industrial tasks.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}