1. Introduction
The modelling of astrophysical phenomena including jets, accretion disks, winds, solar flares, and magnetospheres has prompted the search for efficient and accurate numerical formulations for solving the magnetohydrodynamics (MHD) equations. The current status of MHD simulations for space weather is reviewed in the recent book of Feng [
1]. Numerical computations based on finite volume (FV) discretization are powerful numerical methods for solving the MHD equations. It evolves only cell averages of a solution over time and can preserve the conservation of relevant physical quantities such as mass, momentum and energy.
High-order numerical methods have gained popularity in the last years because they are more efficient at capturing the rich structure in space weather phenomena than the low-order method [
2,
3,
4,
5,
6,
7,
8,
9]. To achieve high order accuracy, the high order reconstructions such as the k-exact reconstruction, the Essentially Non-Oscillatory (ENO) [
10], Weighted Essentially Non-Oscillatory (WENO) [
11,
12], Total Variation Diminishing (TVD) [
13] and Piecewise Parabolic Method (PPM) [
13,
14] reconstructions have been developed. In a series of works, discontinuous Galerkin (DG) methods have been developed for nonlinear conservation laws and related equations [
15,
16,
17,
18]. Compared to FV schemes, DG stores and evolves every polynomial coefficient in a cell over time. When the reconstruction order becomes higher, to remove spurious oscillations and maintain the high resolution near discontinuities, a nonlinear limiting procedure or characteristic decomposition is usually necessary.
Recently, ref. [
19] proposed a new FV approach by using the hierarchical non-oscillatory reconstruction to remove the spurious oscillations while maintaining the high resolution without characteristic decomposition. First, a high degree polynomial in each cell is reconstructed. These polynomials are not necessarily non-oscillatory. Then, the hierarchical reconstruction is applied to the piece-wise polynomial solution. Ref. [
19] also demonstrated that this new FV scheme does not have significant spurious oscillations even for a formal order of accuracy as high as 5th order. Later, refs. [
20,
21] extends this central hierarchical non-oscillatory reconstruction to the MHD equations. Since the FV approach proposed by [
19,
20,
21] has advantages over traditional high order numerical methods, such as its easy operation without characteristic decomposition, it simplifies the numerical calculations. Additionally, it has never been used to model the solar wind. Thus, we adapt the three order FV approach combined with the hierarchical non-oscillatory reconstruction to simulate the large-scale structure of solar wind. To maintain the positivity of density and pressure in the reconstruction process, a self-adjusting strategy proposed by [
22] is also used in the reconstruction process.
The divergence free constraint on the magnetic field is another numerical challenge in the simulation of MHD. In the past decades, various methods have been developed to satisfy the
constraint in MHD calculations [
23,
24,
25,
26,
27,
28]. Using stagger mashes to control
, the constrained transport (CT) method can maintain the magnetic field divergence around the machine round off error as long as the initial conditions are compatible with the constraints. Thus, we use the CT method to preserve the divergence-free condition of the magnetic field in this paper. As in [
29,
30], a least-squares reconstruction with the divergence free constraints is used to get the face average magnetic fields initially. The magnetic fields divergence error is around
.
This paper is organized as follows. In
Section 2, MHD equations for solar wind plasma in spherical coordinates are described.
Section 3 is devoted to a grid system and the numerical scheme formulation.
Section 4 presents the numerical results for steady-state solar wind structure. Finally, some conclusions are presented in
Section 5.
2. Governing Equations
The magnetic field
is split as a sum of a time-independent potential magnetic field
and a time-dependent deviation
[
27,
31]. In the present paper, this physical splitting of the MHD equations into the fluid part and the magnetic part are considered in order to design efficient FV schemes with spatial discretization for the fluid equations and the magnetic induction equation adopted from [
27]. The fluid part with the magnetic field becomes a source term in an extended Euler system reading as follows:
where
Here,
e corresponds to the modified total energy density consisting of the kinetic, thermal, and magnetic energy density (written in terms of
).
is the mass density,
are the flow velocity in the frame rotating with the Sun,
p is the thermal pressure, and
denotes the total magnetic field consisting of the time-independent potential magnetic field
and its time-dependent derived part
.
t and
are time and position vectors originating at the center of the Sun.
,
m
s
kg
is the gravitational constant,
kg is the solar mass, and
rad day
is the solar angular speed.
is the ratio of specific heats.
and
stand for the momentum and energy source terms, which are responsible for the coronal heating and solar wind acceleration. Following [
27,
31], the source terms
and
are given as follows:
where
,
with
,
in this paper are given as
respectively.
are set to be 1 R
,
is the magnetic expansion factor, which reads
where
and
are magnetic field strength at the solar surface and at the heliocentric distance R = 2.5 R
.
is the minimum angular separation between an open magnetic field foot point and its nearest coronal hole boundary.
The magnetic fields equations runs as follows:
and t are normalized by the characteristic values and , where are the density and sound speed at the solar surface.
3. Mesh Grid System and Numerical Scheme Formulation
Our simulated region is from 1 R
to 20 R
. The six-component grids system (
Figure 1) consisting of six identical component meshes with partial overlap on their borders is used in this paper [
27,
28,
31]. The following grid partitions are employed:
.
R
if
R
;
with
if
R
;
if
R
.
The simulation domain is partitioned into the sliding cells with and marking the bounding faces of the cell. The volume-averaged coordinates of a cell are: . The coordinates of six face centers of a cell are noted as , , with .
The Equation (
1) is solved by averaging over cells, and Equations (
2)–(
4) are solved by averaging over facial areas. The FV discretization can be written as follows:
The , and is the face averages magnetic fields at face , , and .
For any function
corresponding volume averages are defined as:
where
is the volume of cell
, the subscripts
correspond to different gaussian integration points
and weights
. For any function
corresponding face averages at face
are defined as:
denote the areas
surfaces of cell
. For any function
corresponding line averages at line
are defined as:
Thus, the second step in evaluating the fluxes is to reconstruct the point-wise values of the solution from cell averages and face averages to obtain high-order accurate approximations of the values of
and
at the integration points. After the reconstruction is carried out, we have two sets of values of
and
at each face, and four sets of values of
and
at each line. Then, the flux at the point of each interface is calculated using the HLL numerical flux as in [
27].
3.1. Reconstruction for Cell Average Variables over the Cell
The three order polynomial in cell
can be written as:
Now integrate this underlying polynomial in the neighboring cells
,
,
,
,
, and
, we can obtain the following linear system:
with
denoting the neighboring cells. From these equations, we can calculate the
and
. Since the reconstructed polynomial can be oscillatory near discontinuities of the solution, the next step is to apply the non-oscillatory hierarchical reconstruction to remove possible spurious oscillations.
First, we take the derivative with respect to
r, which yields:
Second, we calculate the volume-average of
on the cell
to obtain
. With the three new volume averages, we can apply the minmod limiter function to calculate a new
, which is:
We calculate the volume-average of
on the cell
to obtain
. With the three new volume averages, we can apply the minmod limiter function to calculate a new
, which is:
If we take the derivative with respect to
and
, we can calculate the
and
. We will use the second-degree remainder technique to calculate
. Inserting
into the parabola, we then calculate the volume averages for the linear part of the reconstruction,
on the cells
, which yields:
We again apply a minmod procedure to evaluate
, which yields:
We can get
in the same way. To preserve the volume-averaged value, we set:
with
Finally, we obtain the non-oscillatory reconstruction:
3.2. Reconstruction for Face Average Magnetic Fields at Cell Faces
The three order polynomial for the magnetic fields at faces
can be written as:
Integrate this underlying polynomial in the neighboring faces
,
,
,
, and
, we can get the following linear system:
with
denote the neighboring cells. From these equations, we can calculate the
, and
. The next step is to apply the non-oscillatory hierarchical reconstruction for the magnetic fields at faces.
First we take the derivative with respect to
, which yields:
Second, we calculate the face-average of
on the faces
to obtain
. With the three new face averages, we can apply the minmod limiter function to calculate a new
, which is:
We calculate the face-average of
on the faces
to obtain
. With the three new face averages, we can apply the minmod limiter function to calculate a new
, which is:
If we take the derivative with respect to
, we can calculate the
. We will use the second-degree remainder technique to calculate
. Inserting
into the parabola, we then calculate the face averages for the linear part of the reconstruction:
on the three faces
, which yields:
We again apply a minmod procedure to evaluate
, which yields:
We can get
in the same way. To preserve the face-averaged value, we set:
with
Finally, we obtain the non-oscillatory reconstruction
Similarly, we can get the the non-oscillatory reconstruction for , and .
3.3. The Third Order Reconstruction for Magnetic Fields over a Cell
The reconstruction for magnetic fields over a cell can be written as:
and can be written similarly. The reconstructed field in the interior of the cell must matches the parabolic profile on the cell faces. This is achieved by enforcing the following conditions:
- (1)
exactly matches and on and faces;
- (2)
exactly matches and on and faces;
- (3)
exactly matches and on and faces;
- (4)
Any coefficients in and that remain as free parameters are set to zero.
3.4. Three-Order Runge–Kutta Scheme
To retain uniformly high order of time accuracy, the solution is advanced in time by means of Runge–Kutta methods, such as the following third order method [
32]. The discretized fluxes and source terms for Equation (
1) and Equations (
2)–(
4) are defined as
and
respectively.
denotes volume average, and
denotes area average for magnetic field
. Then, the following three stages are used to solve the full system:
The time step length is prescribed by the Courant–Friedrichs–Lewy (CFL) stability condition:
Here,
are the fast magnetosonic speeds in
directions respectively.
where
are the sound and Alfvénic speeds. We employ the simultaneous time integration with CFL =
in the following run.
3.5. Initial-Boundary Value Conditions
Initially, we specify the magnetic field by the line-of-sight photospheric magnetic data from the Wilcox Solar Observatory to produce a 3-D global magnetic field in the computational domain by the potential field source surface (PFSS) model. The PFSS model begins with the synoptic magnetogram of the Sun and extrapolates the magnetic field to a sphere called the source surface where the coronal magnetic field is purely radial. The source surface height
is taken to be 2.5
. Given the WSO magnetogram data at 1
, a poisson equation
is solved using the spherical harmonic expansion approach. Then, the potential magnetic field solution is obtained as
. It should be known that the WSO maps have a very bad spatial resolution, GONG-ADAPT or HMI are probably most suited for the study of fine wind structures. The initial distributions of plasma density
, pressure
p, and the velocity
are given by Parker’s solar wind flow [
33]. The temperature and number density on the solar surface are
K,
. To get the face average magnetic fields, a least-squares reconstruction with the divergence free constraints are applied to the cell average magnetic fields as done in [
30]. For example, the reconstructed polynomial at cell
can be written as:
This polynomial is also assumed to hold at neighboring cells
,
,
,
,
,
. That is:
The six equations along with the divergence free constraints:
are used to identify the gradient in Equation (
11). To make the magnetic fields divergence free, the iteration method is used:
Solving Equation (
11) using the least-squares method based on the singular value decomposition (SVD);
The magnetic field at face centers are set as arithmetic average of the two states at the interface, for example, , and is the face average of the reconstructed polynomial and at face .
If the , end. Else, go to 1.
It can be found that the magnetic fields calculated from 2 is continuous in the normal direction. Step 3 can make the magnetic fields satisfy global solenoidality initially.
In this paper, the Dirichlet boundary conditions are used at the inner boundary. That is, all physical quantities are fixed as initial. The temperature and number density are set as K, . The velocities are given by Parker’s solar wind flow and the magnetic fields are given by the PFSS model. The outer boundary at 20 R are imposed by linear extrapolation across the relevant boundary to the ghost node in the computational domain. There horizontal boundary in directions at the six-component’s borders, is interpolated from the neighbor stencils with the three-order Lagrange polynomial interpolation.
4. Numerical Results
In this section, we present the numerical results of CR 2207 for the solar coronal numerical simulation. CR 2207 indicates the period from 6 August–2 September 2018, which is closer to minimum activity. The computation is completed on the Th-1A supercomputer from the National Supercomputing Center in TianJin, China, in which each computing node is configured with two Intel Xeon X5670 CPUs (2.93 GHz, six-core). Our code utilizes 96 core and takes about 50 h to achieve steady state.
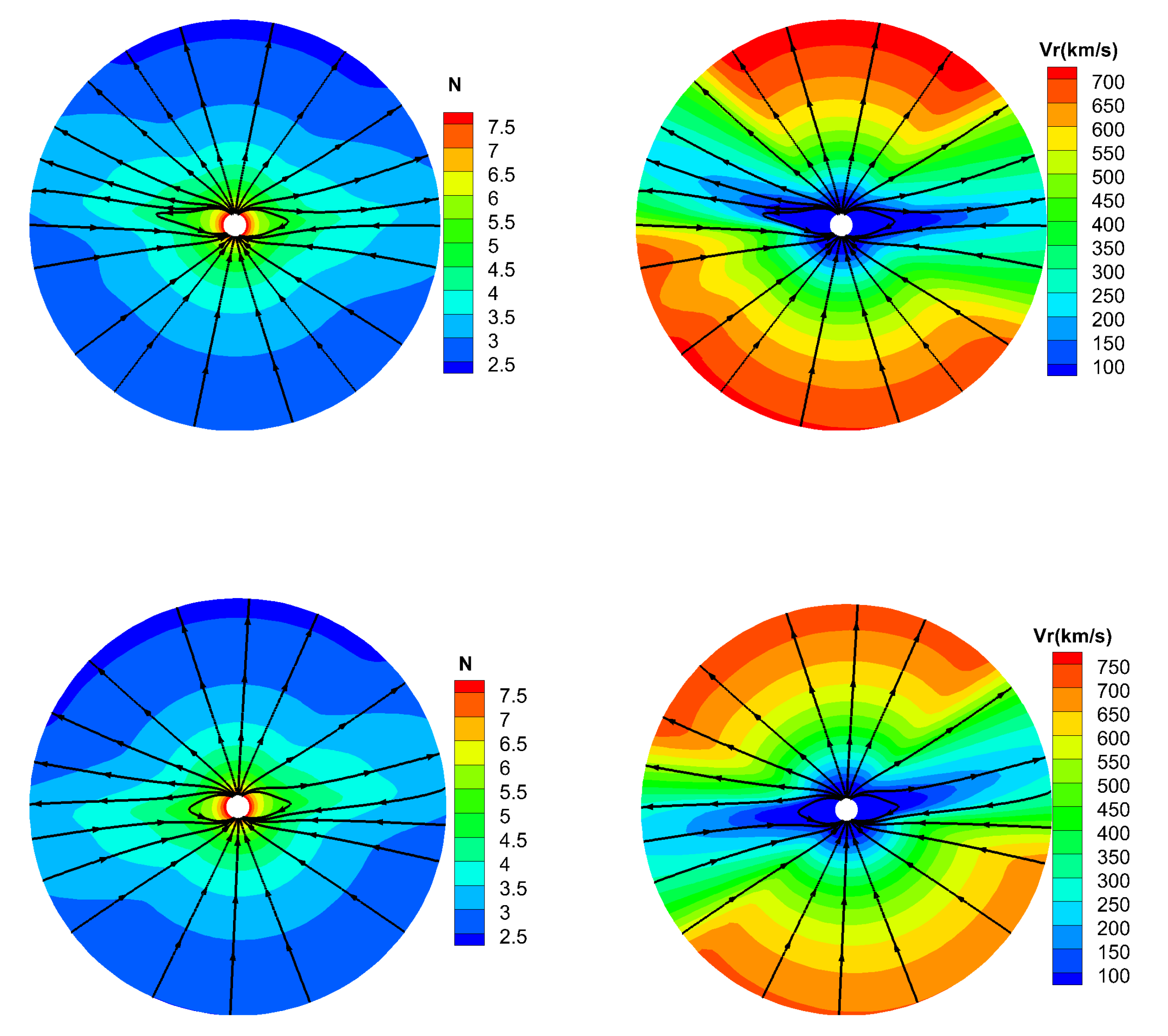
Figure 2 shows the model results for number density
N, radial speed
and the magnetic fields lines on meridional planes at
and
from 1–20 R
, where arrowheads on the black lines stand for the direction of magnetic fields. It can be seen from this figure that the fast solar wind flows and low density exist at the high latitudes, where the magnetic field lines extend to interplanetary space in this region. However, at lower latitudes around the vicinity of the equator or heliospheric current sheet (HCS) region showed the slow solar wind and high density, and a helmet streamer stretched by the solar wind can be observed within about five solar radii. Above the streamer, a thin current sheet is displayed between different magnetic polarities. These are the typical structures of solar wind in the solar minimum.
Figure 3 shows the coronal observations and simulated results on the meridional planes at
and
. The first row displays the coronal pB images synthesized by the simulated results of the MHD model from 2.0 R
to 6 R
. The second row shows the coronal pB images observed on August 14 (left) and August 5 (right) from the LASCO-C2 instrument on board the SOHO spacecraft. From this figure, we find that the positions of the bright structures are roughly matched in the observed and synthesized images. We infer that the bright structures are formed by streamers compared with the magnetic topologies in
Figure 2.
Figure 4 presents the radial speed
and Alfvénic surface (
white line) on the meridional plane of
and
from 1–20 R
. Following [
30], the Alfvénic surface is defined as
. Since the solar wind is not spherical and smaller velocities exist at lower latitudes, the Alfvénic surface is wispy. In the inner corona below the Alfvénic surface, the magnetic stress dominates the interaction. The coronal magnetic field is largely dipole-like around the minimum phase of solar activity. The gradient of radial field strength in latitude, with stronger field at higher magnetic latitude, bends stream lines from the radial direction toward the magnetic equator. However, in the corona beyond the Alfvénic surface, it is the inertia of radially accelerated plasma flow that dominates the magnetic field-plasma interaction. The lowest Alfvénic surface occurs in the equator and the highest Alfvénic surface occurs in the pole [
30,
34,
35]. Based on the radial evolution of the direction of coronal magnetic field, ref. [
35] showed that the coronal helmet streamer belts observed at several heights by SOHO/LASCO, together with the source surface field of the horizontal current-current sheet-source surface model, can be used to find the heliocentric distance of the lowest and highest Alfvénic critical point. The highest Alfvénic critical point around the solar minimum is located between 10 and 14 solar radii. Similar to that in [
30,
35], the Alfvénic surface ranges from about 5 to 11 solar radii during this Carrington rotation.
To quantitatively see the divergence of magnetic fields, two types of divergence error are defined:
,
[
28], where
is the characteristic size of the cell. Additionally, the L1 normalization for divergence of magnetic fields
is defined, with
as the L1 norm.
Figure 5 shows the initial profile of divergence on the meridional plane of
. We can see that the divergence is about
, and the magnetic fields is divergence free under machine error. Since the CT method can maintain the initial divergence error unchanged in computation, the divergence error keep almost the same t = 20 h as initially, which can be seen from
Figure 6.
Figure 7 shows the L1 normalization for divergence of magnetic fields on the meridional plane of
from 1 to 20 R
at t = 20 h. The volume averaged divergence is about
. The total number of cells in the computational domain is
, thus the L1 norm of the divergence
is about
. The normalization
is about
.
Figure 8 shows the evolution of the average divergence errors as a function of time. The average relative divergence errors are defined as
,
, where
M is the total number of cells in the computational domain. We can see that
and
are about
and
, respectively. These divergence errors stay the same after 10 h and no obvious large error appears after a long run time. Thus, the magnetic field can be stated as divergence free during calculation.
Figure 9 presents the variation of number density
N and radial speed
from 1 R
to 20 R
at different latitudes, where
corresponds to the open field region while
corresponds to the HCS region. As usual, the fast solar wind exists in the open field region, whereas the slow solar wind exists in the HCS region, and the variation of number density is opposite to that of the speed.
Figure 10 displays the number density, radial speed and temperature maps for the MHD steady-state solution at 2.5 R
and 20 R
. The left column denotes number density
N with unit
from top to bottom, the middle column denotes radial speed
with unit km/s, the last column denotes temperature
T with unit
K. Obviously, the number density decreases with radial distance while radial speed increases. The HCS region has high density, low speed and low temperature, whereas the inverse condition is seen at the polar or the open field region.
To further validate the simulated results, we map the in situ measurements at 1 au during CR 2207 at the OMNI website back to 20
by using a ballistic approximation [
29].
Figure 11 shows the temporal profile of radial speed
from the mapped observations (solid line) and the MHD model (dashed line). Although a deviation is exist at the first high-speed stream obtained by the MHD model, the simulated results roughly catch the second and third high-speed streams at about
and
.
5. Conclusions and Discussions
In this paper, a three-order, divergence-free finite volume scheme is introduced to simulate the steady state solar wind ambient. The CT method is used to maintain the divergence-free condition of the magnetic field. A least-squares reconstruction of the magnetic field with the divergence free constraints is used to make the magnetic fields global solenoidality initially. To achieve high order accuracy in space, a three order polynomial combined with the hierarchical non-oscillatory reconstruction in each cell is obtained. The three order Runge–Kutta scheme is used for time discretization. Additionally, the composite mesh with six-component grids proposed by [
27,
28,
31] is used for parallelization in
directions to reduce the computational cost.
The numerical results for Carrington rotation 2207 show its ability to produce stable reliable results for structured solar wind. For example, the slow speed solar wind exists near the slightly tilted helioshperic current sheet (HCS) plane and the fast speed solar wind exists near the poles. The magnetic field’s divergence error is around , which is around the machine round off error. All of these give us strong confidence in the current MHD code.
In the future, the propagation of coronal mass ejection in the solar-terrestrial space will be considered. To reach this goal it is first necessary to reconstruct the ambient background condition of solar wind, because these conditions will determine the evolution of coronal mass ejection. The domain will be extended to the Earth, and the propagation of the CME from Sun to Earth will be studied. To study the CME, as in the previous paper [
30], a very simple spherical plasmoid model will be superposed on the background solar wind. The arrival time of the CME and Bz component, as well as the reconnection between CME and solar wind background will be investigated. Particularly, the resistive MHD will be used to study the reconnection between CME and solar wind; it is known that the electric resistivity term in the MHD is a second derivative term and its discretization will reduce the accuracy of the scheme, thus a high order is necessary. We believe that this new scheme can recover the reconnection process more accurately in the next work.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










