Abstract
In the present review we provide an extensive analysis of the intertwinement between Feynman integrals and cohomology theories in light of recent developments. Feynman integrals enter in several perturbative methods for solving non-linear PDE, starting from Quantum Field Theories and including General Relativity and Condensed Matter Physics. Precision calculations involve several loop integrals and an onec strategy to address, which is to bring them back in terms of linear combinations of a complete set of integrals (the master integrals). In this sense Feynman integrals can be thought as defining a sort of vector space to be decomposed in term of a basis. Such a task may be simpler if the vector space is endowed with a scalar product. Recently, it has been discovered that, if these spaces are interpreted in terms of twisted cohomology, the role of a scalar product is played by intersection products. The present review is meant to provide the mathematical tools, usually familiar to mathematicians but often not in the standard baggage of physicists, such as singular, simplicial and intersection (co)homologies, and hodge structures, that are apt to restate this strategy on precise mathematical grounds. It is intended to be both an introduction for beginners interested in the topic, as well as a general reference providing helpful tools for tackling the several still-open problems.
1. Introduction
Feynman diagrams are introduced in the context of quantum interacting field theory, as a graphical representation of the solution of a system of first order differential equations, admitting a path-ordered exponential expression. Usually, the matrix of the system is composed of two terms: one identifying the solution in the absence of interactions, i.e., the free solution, and a second one, carrying information on the interaction, treated as a perturbation to the free evolution, and characterized by the strength of the interaction, i.e., the coupling constant, considered as a small quantity. The perturbative expansion of the path-ordered exponential, obtained by a series expansion in the coupling constant, gives rise to the Dyson series, containing an infinite sequence of iterated integrals, whose iteration number increases with the perturbative order: at any given order, and hence for any given power of the coupling constant, the integrands are formed by an ordered product of functions-to better say, distributions-, representing the free evolution (the propagators), and the insertion of interaction terms (the vertices).
Dyson series can be used to describe the evolution of physical systems, whose dynamics follow the Volterra-type model, within quantum as well as classical physics. Therefore, the predictive power of a theoretical model aiming to describe the dynamics of physical systems on a wide spectrum of physical scales, from microscopic such as colliding elementary particles to macroscopic such as coalescing astrophysical binary systems, may depend on our ability to evaluate Feynman integrals, also known as solving systems of differential equations.
Hamiltonian and Lagrangian carry information about the free and the interactive dynamics, and the basic rules to build Feynman graphs can be systematically derived from them. In particular, the interaction between two elementary entities experiencing the presence of each other through the mediation of a third entity can be described like a scattering event. Therefore, quantities such as the impact parameter, the cross section, the scattering angle, or the interaction potential turn out to be related to the scattering amplitude, which ultimately admits a representation in terms of Feynman graphs.
“Perturbation theory means Feynman diagrams” [1], yet the diagrammatic approach is not limited to the perturbative regime: “Perturbation theory is a very useful device to discover very useful equations and properties that may hold true even if the perturbation expansion fails” [2].
More modern approaches based on analyticity and unitarity, so called on-shell and unitarity-based methods [3,4,5,6], make use of the factorization properties of scattering amplitudes (exposed by using complex variables to build suitable combinations of energy and momenta of the interacting objects) in order to more efficiently group the contributing Feynman diagrams and exploit recursive patterns, hard to identify within the pure diagrammatic approach. In this case, the symmetries, which do not necessarily hold for the individual diagrams, and which are inherited from the lower-order amplitudes, yield novel representations of the scattering amplitudes (see f.i. [7,8]).
Therefore, scattering amplitudes, at any given order in perturbation theory, can be canonically built out of linear combination of Feynman graphs and equivalently out of products (convolutions) of lower order amplitudes. Independently of the strategy adopted for their generation, the evaluation of scattering amplitudes beyond the tree-level approximation requires the evaluation of multivariate Feynman integrals.
Dimensional regularization played a crucial role in the formal mathematical developments of gauge theories and of Feynman integrals. Exploiting the analytic continuation in the space-time dimensions d of the interacting fields, it is possible to modify the number of integration variables in order to stabilize otherwise ill-defined (mathematically non-existing) integrals emerging in the evaluation of quantities that ultimately have to be compared with numbers coming from (physically existing) experiments.
Within the dimensional regularization scheme, Feynman integrals are not independent functions. They obey relations that can be established at the integrand level, namely among the integrands related to different graphs, systematized in the so-called integrand decomposition method for scattering amplitudes [9,10,11,12,13,14,15,16], as well as relation, that hold, instead, just upon integration. The latter are contiguity relations known as integration-by-parts (IBP) identities [17], which play a crucial role in the evaluation of scattering amplitudes beyond the tree-level approximation. Process by process, IBP identities yield the identification of an elementary set of integrals, the so-called master integrals (MIs), which can be used as a basis for the decomposition of multi-loop amplitudes [18]. MIs are special integrals, namely elementary Feynman integrals that admit a graphical representation (in terms of products of scalar propagators and scalar interaction vertices). At the same time, IBP relations can be used to derive differential equations [19,20,21,22,23,24,25,26], finite difference equations [27,28], and dimensional recurrence relations [29,30] obeyed by MIs. The solutions of those equations are valuable methods for the evaluation of MIs for those cases where their direct integration might turn out to be prohibitive (see, e.g., [31,32,33]).
The study of Feynman integrals, the systems of differential equations they obey, and the iterated integral representation of their solution [34,35,36] have been stimulating a vivid interplay and renovated interest between field theoretical concepts and formal mathematical ideas in Combinatorics, Number Theory, Differential and Algebraic Geometry, and Topology (see, e.g., [37,38,39,40,41,42,43,44,45,46,47,48,49]).
The geometric origin of the analytic properties of Feynman integrals finds its roots in the application of topology to the S-matrix theory [50,51,52]. In more recent studies, co-homology played an important role for identifying relations among Feynman integrals and to expose deeper properties of scattering amplitudes [39,41,45,46,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73]
In this editorial, we elaborate on the recently understood vector space structure of Feynman integrals [59,60,61,62,63,64,65,66] and the role played by the intersection theory for twisted de Rham (co)-homology to understand it.
As observed in Reference [59], after looking at Feynman integrals as generating a vector space, one can see intersection numbers of differential forms [74] as a sort of scalar product over it. From this viewpoint, the intersection products with a basis of MIs mimic the projection of a vector into a basis. For example, using intersection projections for 1-forms applied to integral representations of the Lauricella functions allowed one to easily re-derive continuity relations for such functions and the decomposition in terms of MIs for those Feynman integrals on maximal cuts that admit a representation as a one-fold integral [59,61]. For more general cases, when one has to deal with multifold integral representations [61,63,65], the multivariate intersection numbers have been introduced [46,75,76,77,78,79,80,81,82]. For the case of meromorphic n-forms, an iterative method for the determination of intersection numbers was proposed in [60] and successively refined in [63,65,66]. The only simple case is for logarithmic (dlog) differential forms, which bring simple poles only, whose intersection numbers can be computed by employing the global residue theorem [66].
Within this approach, the number of MIs, proven to be finite [83], is the dimension of the vector space of Feynman integrals [63], and corresponds to the dimension of the homology groups [53], or equivalently of the cohomology group [59,61,63,65], and can be related to topological quantities such as the number of critical points [53], Euler characteristics [84,85,86,87], as well as to the dimension of quotient rings of polynomials, for zero dimensional ideals, in the context of computational algebraic geometry [65].
Another interesting consequence of intersection numbers is about their underlying geometrical meaning, which leads to determining linear relations, equivalent to IBP relations, and quadratic relations for Feynman integrals [59,61,63,65], called twisted Riemann periods relations (TRPR) [74] since they represent a twisted version of the well-known bilinear Riemann relations. Some of such quadratic relations were already noticed by using number-theoretic methods to Feynman calculus and have given rise to conjectures [54,55,56,88,89], whose proof has been given only recently [70,71], while other bilinear relations, proposed in [90], have yet to be understood in the light of the TRPR.
As stated above, in this work, we first concentrate on the basic aspects leading to the definition of a vector space of Feynman integrals; then we move onto the mathematical description ( starting from an elementary point of view) of the instruments needed in order to tackle the geometrization program just described. Finally, we devote some time to addressing the problem of the actual computation of intersection numbers. More precisely, in Section 2, we mostly describe the Baikov representation of Feynman integrals and its role in uncovering the underlying cohomological structure, while in Section 3, we consider the vector structure of Feynman integrals—including bilinear identities—and also precisely describe how the number of MIs can be computed. In Section 4, we provide an elementary illustration of cohomologies, while in Section 5, we highlight the link between cohomology theory and integration theory. In Section 6, we give an extensive lookout at the advanced mathematical constructions behind. Finally, in Section 7 we make some explicit examples of practical techniques adopted to compute intersection numbers. The three appendices include some technical details.
2. Feynman Integral Representation
We aim at describing the properties of (scalar) Feynman integrals, representing the most general type of integrals appearing in the evaluation of Scattering Amplitudes, left over after carrying out the spinor and the Lorentz algebra (spinor-helicity decomposition, Dirac–Clifford gamma algebra, form factor decomposition), generically indicated as
In the classical literature, the evaluation of Feynman integrals is carried out by direct integration, in position and/or momentum-space representation, making use of Feynman, or equivalently Schwinger, parameters. More advanced methods make use of differential equations as an alternative computational strategy, which turns out to be very useful whenever the direct integration becomes prohibitive, for instance, due to the number of the physical scales in the scattering reaction (number of particles and/or masses of particles). In this work, we would like to approach the multi-loop Feynman calculus in a different fashion from the direct integration, making use of novel properties that emerge when Feynman integrals are cast in suitable parametric representation, such as the so called Baikov representation [91] (see also [92] for review). First, we observe that the integration variables involved in the integral (1) are the usual L loop momenta , which are not Lorentz invariants. Baikov representation consists in a change of variables in which the new integration variables are actually Lorentz invariants: that is, the independent scalar products one can build, using the L loop momenta and E, independent external momenta . Using these ideas, one can put the Feynman Integrals in the following form, called Baikov representation:
For a proof, see Appendix A.
Before getting more into depth of the meaning behind Equation (2), an observation is necessary. By comparing the original integral with Equation (2), one observes that the number of integration variables changes from to M. When we perform the projection (A4) of each 4-momentum onto the space generated by the vectors coming next, it is actually clear that this process cannot continue indefinitely, as all the vectors are certainly not independent if they lie in the physical 4D space. The decomposition we describe in Equation (A4) is to be thought of in an abstract (sufficiently large) dimension D. Since the final expression is an analytic function of D, we get the physically meaningful result via an analytic continuation down to . This discussion can be also summarized by saying that we are implicitly using dimensional regularization to make sense of the expression (1), which is obviously divergent in .
The representation in Equation (2) highlights new properties of the original integral (1) and allows us to study its topological structure as Aomoto-Gel’fand integral [59]. In fact, extending the integral in Equation (2) into the complex space, it takes the form
where K is constant prefactor, is a multivalued function such that and is an M-form
Because of the Stokes theorem, given a certain -form the following identity holds:
as is integrated along where u vanishes. Equation (5) can also be rewritten as
Equation (6) states that, because of the introduction of the connection where , it holds that
as the second term in the right side gives a null contribution. Equation (7) identifies an equivalence class, addressed as
This equivalence class defines twisted cohomologies (twisted because the derivative involved is not simply d as in the de Rham cohomology but it is the covariant derivative ). Representatives of a class are called twisted cocycles .
In this fashion, the integral I,
arises as a pairing between the twisted cycle and the twisted cocycle . For ease of notation, the subscript is understood and restored when needed.
Aomoto-Gel’fand integrals admit linear and quadratic relations that can be used to simplify the evaluation of scattering amplitudes. In particular, linear relations can be exploited to express any integral as a linear combination of an independent set of functions, called master integrals (MIs). The decomposition of Feynman integrals in terms of MIs was proposed in [17] and later systematized in [18], and represents the most common computational technique for addressing multi-loop calculus nowadays. The novel insights we elaborate on in this work allow us to explore the underpinning vector space structure obeyed by Aomoto-Gel’fand integrals in order to investigate the properties of Feynman integrals making use of co-homological techniques. Accordingly, the decomposition of any generic integral in terms of a basis of MIs, say , can be achieved in a twofold approach:
or
The former decomposition involves a basis formed by independent equivalence classes of the underlying twisted cohomology, while the latter involves a basis formed by independent equivalence classes of the twisted homology. Remarkably, the dimension of the twisted homology and co-homology spaces is the same.
Let us finally remark that although Baikov representation turned out to be useful to uncover the cohomological structure of Feynman integrals [59], there is no commitment to necessarily use it. Other parametric representations, such as Feynman-Schwinger [93], n-dimensional polar coordinates [94], and Lee-Pomeransky representation [53], to name a few, can be equivalently used [64]. In fact, the integral in (1) can be cast in the form [53]
with and , where and are the Symanzik polynomials. The latter are defined as
with A, B, and C being the matrices that appear in the decomposition of the denominators, as
where
We observe that, although the integral in Equation (12) has the structure of Aomoto-Gel’fand integrals Equation (9), the polynomial does not vanish on the boundary of the integration domain; therefore, surface terms can emerge in in the (co)-homology decomposition. It turns out that these extra terms can be related to integrals belonging to simpler sectors, i.e., with fewer denominators than the ones in the original diagram.
3. The Twisted Cohomology Vector Space
3.1. Vector-Space Structure
To study the co-homology of dimensionally regulated Feynman integrals, we consider integrals of the form
regarded as a pairing between and the function , integrated over the contour . In particular, is a multivalued function, (or ), with
The pairing so defined is not strictly speaking a pairing of forms but of equivalence classes of n-forms, such that two differential forms in the same class differ by covariant derivative-terms whose contribution under integration over a contour vanishes. Let us see how this works.
3.2. Dual Cohomology Groups
Let be an -differential form and an integration contour such that (17) holds true. Thus, we can use Stokes theorem to write
where
As a consequence, we immediately get
which means that the forms and give the same result upon integration, as stated above, and we can consider them as equivalent for the purpose of computing intersections. This is an equivalence relation and we can say that the two forms are in the same equivalence class, writing
Of course, the equivalence classes of n-forms defined by the equivalence relation (21), which we will denote with , define a vector space, called the twisted cohomology group.
Analogously, every time two n-dimensional contours differ by a boundary, they have the same boundary, so if (17) holds for one of them it holds for the other one. Using again the Stokes theorem, it follows that when used as integration contours for a closed n-form , they give the same result and, again, can be considered equivalent. We indicate the equivalence classes of integration contours so obtained with . They define the twisted homology group , which is indeed an abelian group identifiable with a vector space after tensorization with .
Let us consider, now, what happens when using in the integral definition instead of u. Let us define a dual integral
as a pairing between the dual twisted cycle and the dual twisted cocycle . It is clear by construction that what we did before can be repeated in the same way just replacing the covariant derivative with
Then, we immediately get an equivalence relation for dual twisted cocycles, analogous to (21),
which defines equivalence classes denoted by . These equivalence classes define the dual vector space .
As mentioned earlier, an equivalence relation among dual integration contours may also be considered, yielding to the identification of the dual homology vector space , referred to as the dual twisted homology group, whose elements are denoted by .
3.3. Number of Master Integrals
We have shown that we can recognize a vector space structure in Feynman integrals, so that a given integral may be expressed in some basis of the twisted cohomology: if one is able to compute the coefficients of the decomposition, which we discuss in Section 7, the computation will be reduced to the evaluation of some fixed master integrals. All this reasoning would be useless if the dimension of such a vector space turned out to be infinite. Luckily, the number of the independent MIs, which we refer to as , is known to be actually finite [83]. Moreover, it is known how to compute in practice, as we show in this section.
There are actually many interpretations of : here, we focus mainly on the interpretation given by Lee and Pomeransky [53]. Firstly, is the number of the many independent equivalence classes in the associated cohomology group. Due to the Poincaré duality between cohomology and homology classes, it is equivalent to study the dimension of the homology space, which consists in counting how many non-homotopically contractible closed paths exist in the space of integration contours.
We consider a particularly simple case in order to get a clear understanding of the usual reasoning followed when counting independent cycles. Once the associated Baikov representation (2) is derived, it is appropriate to perform a maximal cut (for a more detailed discussion on cuts performed on Feynman integrals in the context of Baikov representation, we recommend taking a look at [95,96]): out of the M total denominators, we put to 0 the N original ones corresponding to physical propagators. Of course, putting a propagator on mass shell is the same as performing a residue, which reduces the level of complexity of the integral. We consider the case where the integral along the maximal cut reduces to one with a single variable:
We stress that, by taking the maximal cut, all the original physical propagators were eliminated, so in Equation (25), the variable is related to one of the fake propagators introduced in Section 2: hence we can consider so it does not introduce any additional singularities. When looking at how many types of non-equivalent integration contours one can build, it is clear that the topology of the space must be taken into account. Suppose that has m distinct zeros: the power introduces in the complex space m cuts starting from each zero point and going to infinity. Supposing that the integrand is well-behaved at infinity (if this were not true, then the whole integral I would not converge), we can connect at infinity the m paths one can draw around the m cuts. The resulting closed path is actually contractible in a single point; hence, only paths are independent (Figure 1).
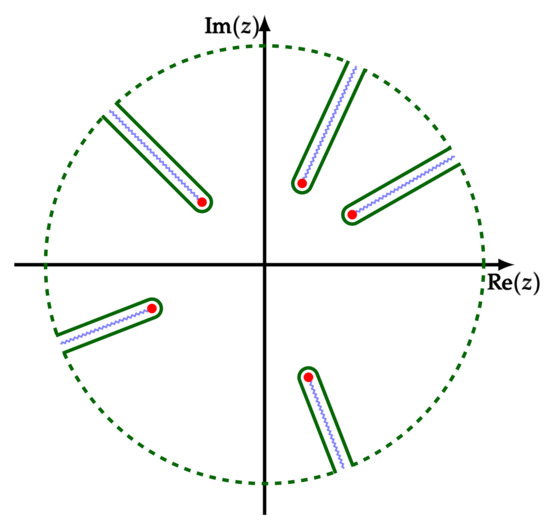
Figure 1.
Complex plane with cuts (undulating blue curves). Each cut is encircled by a path going to infinity while never crossing any cut. Dashed green lines connect at infinity the full green lines and overall create a closed path that is clearly contractible in 0.
Qualitatively, notice that if m is the order of the polynomial , then is the order of the polynomial , and hence it is related to the number of zeros of . Getting back to the notation
where , it is equivalent to the number of solutions of
called the number of proper zeros. Equation (27) suggests a deep connection between the number of MIs and the number of critical points of B.
As shown more extensively in [53], this connection is actually much more general: given an integral of the form (26), in which is a holomorphic M-form and u is a multivalued function such that , then the number of Master Integrals is
where
Summing up, the number of MIs, which is the dimension of both the cohomology and homology groups thanks to the Poincaré duality, is equivalent to the number of proper critical points of B, which solve as . We mention that is also related to another geometrical object: the Euler characteristic [53,87]. It is found that is linked to , where is a projective variety defined as the set of poles of , through the relation [63]
While we do not delve into the details of this particular result, we highlight how, once again, relates the physical problem of solving a Feynman integral as a geometrical one.
3.4. Linear and Bilinear Identities
The bases of dual twisted cocycles and , as well as the bases of the dual twisted cycles and , can be used to express the identity operator in the respective vector spaces. In particular, in the cohomology space, the identity resolution reads as,
where we define the metric matrix
whose elements are intersection numbers of the twisted basic forms. We can do the same in the homology space, where the resolution of the identity takes the form
with the metric matrix now given by
in terms of intersection numbers of the basic twisted cycles.
Linear and bilinear relations for Aomoto-Gel’fand-Feynman integrals, as well as the differential equations and the finite difference equation they obey are a consequence of the purely algebraic application of the identity operators defined above: this is the simple observation made in [59], yielding what we consider as the profound developments reached in the studies [65].
In fact, the decomposition of any generic integral in terms of a set of MIs reads as
and can be understood as coming from the underpinning decomposition of differential forms as
(because the integration cycle is the same for all the integrals of Equation (35)). Likewise, the decomposition of a dual integral in terms of a set of dual MIs
becomes
By applying the identity operator to the forms and ,
the coefficients , and of the linear relations in Equations (36) and (38) read as
The latter two formulas, dubbed master decomposition formulas for twisted cycles [59,61], imply that the decomposition of any (dual) Aomoto-Gel’fand-Feynman integral can be expressed as linear combination of (dual) master integrals is an algebraic operation, similar to the decomposition/projection of any vector within a vector space that can be executed by computing intersection numbers of twisted de Rham differential forms (cocycles).
Alternatively, by using the identity operator in the homology space, one obtains the decomposition of (dual) twisted cycles and in terms of (dual) bases,
where
They imply the decomposition of the (dual) integrals, and , in terms of MIs, and ,
with
where the MIs are characterised by the independent elements of the homology bases.
In the above formulas, and are -matrices of intersection numbers, which, in general, differ from the identity matrix. For orthonormal intersections of basic cocycles, and dual-forms , and basic cycles, and their dual , they turn into the unit matrix, hence simplifying the decomposition formulas in Equations (41), (42), and (44). As usual, one can use the orthonormalization Gram-Schmidt procedure in order to get an orthonormal basis with respect to the intersection product. For 1-forms, it is possible to construct orthonormal bases in a direct way starting from the expression of [61].
We can now get the quadratic identities simply by inserting the identity operators and in the pairing between the twisted cocyles or cycles,
These are the Twisted Riemann’s Period Relations (TRPR) [74]; see also Equation (151).
For applications of twisted intersection numbers to bilinear relations and to Gel’fand-Kapranov–Zelevinski systems, see [54,55,56,70,71,82,88,89,97,98,99].
4. Pictorial (Co)Homology
Before providing a geometric interpretation of Feynman-type integrals, we want to recall some fundamental facts of topology, homology and cohomology, only at an intuitive level, for those who need a refresher on these concepts.
4.1. The Euler Characteristic
One of the most known topological facts is probably the Euler theorem, Reference [100], relating the numbers of faces, edges, and vertices in a tessellation of a compact simply connected region of the plane, such as an electricity grid or a Feynman diagram without external legs: the number v of vertices minus the number j of edges plus the number f of faces is always equal to 1,
independently of the details of the tessellation. This can be quite easily understood as follows. The rules of the game are that any face is simply connected and has a one-dimensional boundary that is the union of edges and vertices (no lines or vertices are internal to a face); any edge is a simple line ending at two vertices (which may coincide); and no vertices belong to an internal point of an edge.
With these rules, given a simply connected region, the simple tessellation we can do is with just one face (covering the whole region), one edge (the whole boundary cut in a point), and one vertex (the cut point). Therefore, in this case, . Now, suppose it has given a tessellation. We can modify it by adding an edge. This can be done in four different ways:
- The new edge starts and ends in already existing (and possibly coincident) vertices (Figure 2). In this case, the new edge cuts a face in two, and the new tessellation has , , so that ;
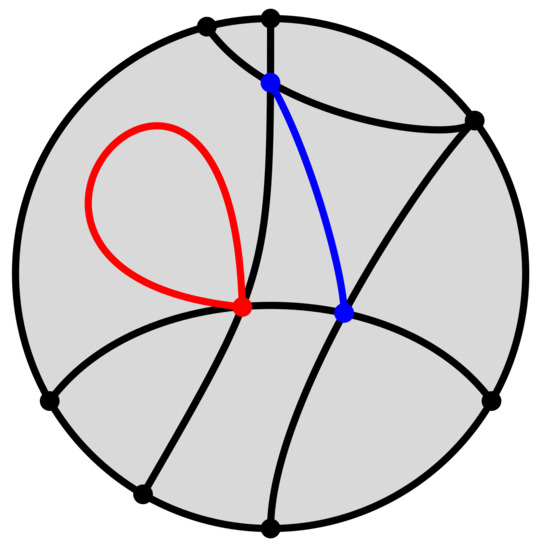 Figure 2. The red edge starts and ends at the same vertex, while the blue one belongs between two vertices.
Figure 2. The red edge starts and ends at the same vertex, while the blue one belongs between two vertices. - The new edge extends from an already existing vertex to a new vertex attached to an existing edge (Figure 3). The new edge separates a face into two faces and the new vertex separates the old edge into two edges. Therefore, the new tessellation has , , , so that ;
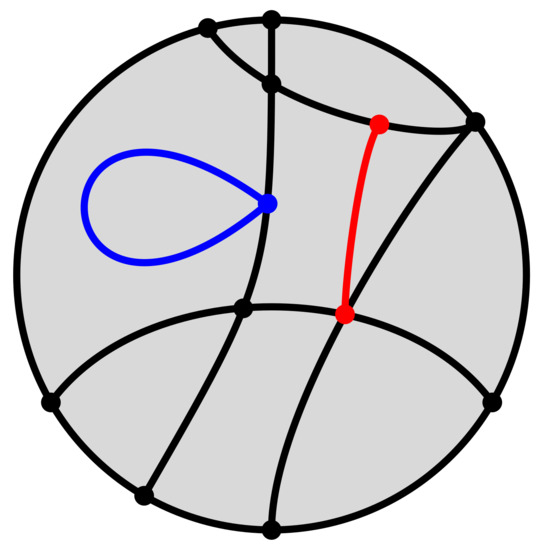 Figure 3. The blue edge starts and ends at the same new vertex, while the red one starts from an old vertex and ends in a new one.
Figure 3. The blue edge starts and ends at the same new vertex, while the red one starts from an old vertex and ends in a new one. - The new edge starts from and ends to a unique new vertex, inserted inTO an old edge (Figure 3). The new edge cuts a face into two, and the new vertex cuts the old edge into two. Therefore, the new tessellation has , , , so that ;
- the new edge extends from a new vertex to a different new vertex attached to two different or the same existing edge (Figure 4). The new edge separates a face into two faces. The new vertices separate two edges into two parts each or a unique edge in three. Therefore, the new tessellation has , , , so that .
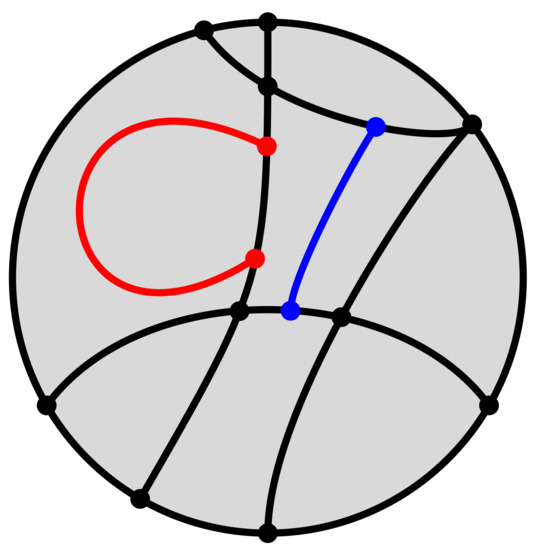 Figure 4. The red edge lies between two different new vertices on the same edge, while the blue one lies between two new vertices belonging on two different edges.
Figure 4. The red edge lies between two different new vertices on the same edge, while the blue one lies between two new vertices belonging on two different edges.
Therefore, we see that is invariant, and since any tessellation can be obtained from the most elementary one by acting with these operations, we see that . What happens if in place of a simply connected region we consider a region with one hole? We can again consider a tessellation for it and prove that is invariant. This follows from the fact that if we close the hole by adding the face corresponding to it, we get a simply connected region with , , , so that
Changing the topology, the number is changed. From the same reasoning, we see that if we consider k holes, then
Having understood the mechanism, we can go beyond and see that does not change if we deform the given region a bit, without changing its topology. For example, we can deform a simply connected region S to cover part of a sphere. However, if we close this surface to cover the sphere, the topology changes and what we do to of the original piece of surface is to add a face so that for the sphere (Figure 5),
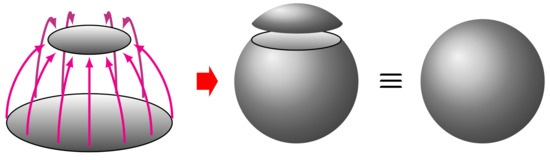
Figure 5.
A sphere is obtained by adding a face to a disc: the Euler characteristic increases by 1.
Each time we make a hole on the sphere, we diminish by 1. What does it change if we pass from a sphere to a torus? We can get a torus from a sphere in the following way. First, we can cut two spherical caps out of the sphere (say along the arctic and antarctic polar circles). What remains is a deformed piece of a cylinder, and since it is like a sphere with two holes it has . The torus is then obtained by gluing two such pieces along the circles (Figure 6). Since both have , we see that for the torus we have
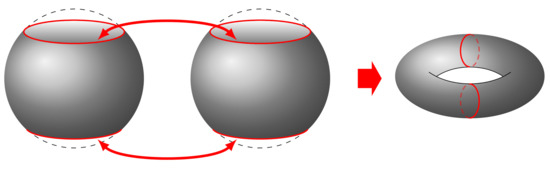
Figure 6.
A torus is obtained by gluing two cylinders along the boundaries.
If we practice k holes on the torus we get . If we want to pass to a surface of genus 2, we have to practice two holes in the torus surface and glue the extremities of a piece of cylinder to the holes. The holes diminish by two, while the cylinder is harmless, so in this case. With the same construction we see that for a surface of genus g and k holes on the surface we have
This topological number is called the Euler characteristic of the surface.
4.2. Simplicial (Co)homology
The simplest tessellation we can think of for a surface is a triangulation. The surface is then equivalent to the union of triangles, which are equivalent to two-dimensional simplexes (the convex hull generated by three non-aligned points in ). A triangle has the union of three segments (and three points) as boundary. Each segment is a one-dimensional simplex and each point a zero-dimensional simplex. Two points are the boundary of a 1-simplex. This way, we see the surface as a collection of simplexes glued together. If the triangulation is fine enough, we can guarantee that two simplexes of given dimension meet at most at a simplex of lower dimension (a face). Moreover, all sub-simplexes of any simplex re also in the collection. Such a collection is called a simplicial complex. Thus, we can see a surface as a simplicial complex.
Suppose we want to compute the Euler characteristic starting from it. We have to count the number of faces, edges, and vertices. Now, for example, let us consider a face. It is a filled triangle whose boundary is an empty triangle, so it has one face, three edges, and three vertices. If we squash the triangle along an edge until it collapses over the other two edges, the face disappears and we are left with two edges and three vertices (Figure 7).
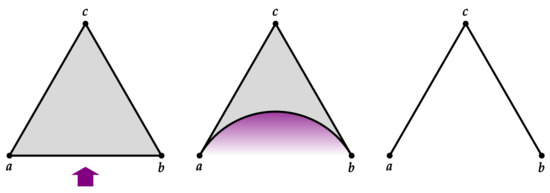
Figure 7.
The edge is squashed until the triangle reduces to two edges.
However, is left invariant. The idea is then to say that the squashed edge is equivalent to the other two. If we orient the triangle, call it , so that it has a well-defined traveling direction, what we have done can be reformulated by saying that can be squashed to after elimination of the face. In practice one realizes this by saying that the boundary of the 2-simplex is
where the sign respects the orientation, and stating that if a loop is a boundary, it is trivial: , which means . Furthermore, if we take a union of such triangles, we see that we can eliminate the common edges (intersections between simplexes) without changing , so as to obtain a simply connected polygon P that is a boundary of a region. Again, we will get that one of the edges of the polygon is equivalent to the sum (union) of the remaining ones. It is easy to check that this can be written as
where are the simplexes comprising P. However, it could happen that the polygon so obtained is not simply connected but has a number of holes. The best we can say this way is that, after collapsing the triangles, the “more external boundary” of the polygon is equivalent to the sum of boundaries of the internal holes; see Figure 8.
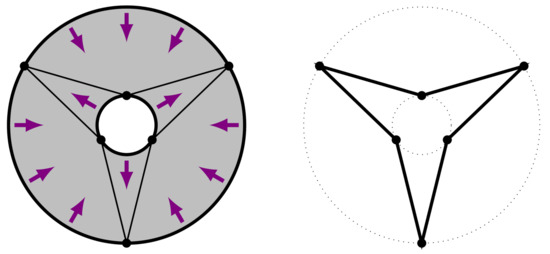
Figure 8.
All triangles are squashed so the ring is reduced to a closed path homotopic to a circle.
Strictly speaking, however, these are not really boundaries, since there is indeed a hole and not a face that they are boundaries of.1 This construction shows that in place of counting all edges, one is interested in counting how much unions of edges forming closed paths are independent in the above sense (so unions of closed paths are not boundaries).
The same construction can be done for counting vertices. If two vertices and are the two tips of an edge, then, in place of counting two vertices and one edge, we can just count one vertex and zero edges, without changing . In this case, we can restate this by saying that
and saying that, again, boundaries are trivial: , . Notice that if a union of edges forms a closed path than . In particular, then, for any polygon P. Finally, we notice that if a connected surface has a boundary, then by collapsing triangles starting from the boundary, one can always reduce to zero the number of faces, while if it has no boundary (like a sphere or a torus), then we can reduce the number of faces to one. This is exactly the number of closed surfaces that are not boundaries (obviously for dimensional reasons, things could change if we worked, for example, in three dimensions).
We can summarize such discussion as follows. We call a the finite union of j-dimensional simplexes, with relative coefficients:
The sign of establishes the orientation, and its modulus is the “number of repetitions”. Therefore, the set of chains is a linear space over . We say that c is closed if and that it is exact if for b a -chain. We are then interested in counting the closed chains that are independent with respect to the relation that two close chains are equivalent if they differ by an exact chain. This space is called the j-th simplicial homology group
of the surface S. Then, we can define the Betty numbers so that the above reasoning leads us to the result
This result does not change if we change the coefficients allowing to take values in . In this case, the Homology groups become vector spaces. Furthermore, we can consider the cohomology groups by replacing simplexes with continuous maps (j-cochain)
and the boundary operators ∂ with the coboundary operators , sending j-cochains in -cochains, defined by
This defines the cohomology groups . It follows that is the linear dual of , so that there are isomorphic as vector spaces.
4.3. Morse Theory
Another way of understanding the topology of a differentiable manifold M is to use properties of functions . Assume these functions are smooth, with non -degenerate isolated critical points. A critical point is a point p where . It is non-degenerate if its Hessian is different from zero. We will not delve here into the details (see [101] for these), but we just want to show how such function may capture the topological properties by looking at the explicit example of a torus. Referring to Figure 9, let consider the map that at p associates the quote . The critical points are the points where the horizontal plane is tangent to the surface. We see that there are four critical points: a maximum, a minimum, and two saddle points.
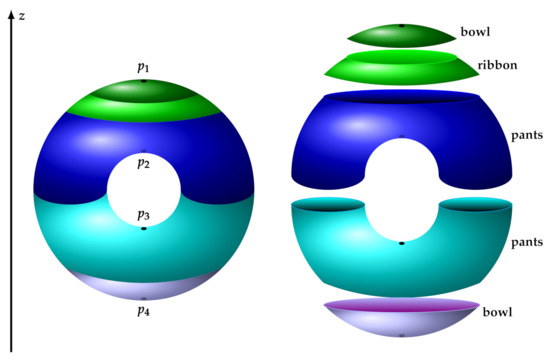
Figure 9.
A torus is cut in pieces with different topologies. Notice that the ribbon can be pasted to the bowl or to the pants without changing the topology of either the bowl or the pants: cutting away pieces not containing critical points does not change the topology.
Let us see how this function can give us a new way to reconstruct the surfaces starting from pieces. Starting from the above, assume that we use the horizontal plane to cut the surface. First, we will meet the top of the surface, corresponding to the maximum. If we cut a little bit below, we get a small bowl facing down. Then, let us move below. If we cut before meeting the second critical point, we cut out a sort of ribbon, whose boundaries are homologically equivalent. This will occur each time we take two cuts not containing any critical point in between. Then, we move even below until meeting the saddle point. If we cut a little bit below, we get a piece that looks like a pair of pants. If we go even more below, until passing the second saddle point , we get a second pair of pants (with the legs upside).2 Going below the point we are left with a second bowl. Forgetting the trivial pieces, we see that we can reconstruct the surface by gluing together the shapes obtained after cutting horizontally around the critical points. A maximum gives a bowl down, any saddle point gives a pair of pants, and a minimum gives a bowl up. Each of these shapes is understood by looking at the signature of the Hessian at each critical point. Starting from above, we have just to look at the principal ways to go down (Figure 10):
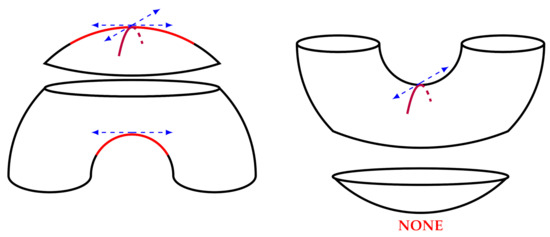
Figure 10.
Principal descending directions from the critical points at any piece.
- At , the Hessian is negative, so it has two principal directions going down (the eigenvectors). We say that has Morse index 2.
- At and , the Hessian is indefinite, it has only one negative eigenvalue at which it corresponds a descending direction. We say that and have Morse index 1.
- At , the Hessian is positive. There are not descending directions and we say that has Morse index 0.
If is the number of critical points with Morse index n, then we can define the Euler number associated to our surface S (M stays for Morse):
Notice that in our example we get . If we deform the surface without changing the topology, like in Figure 11, the number of critical points can change, but remains unchanged.
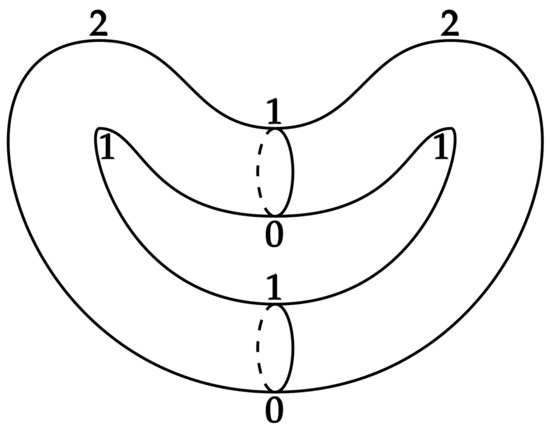
Figure 11.
Deforming the torus does not changes the Morse index.
It is a topological invariant and, in this case, it is zero, equal to the Euler characteristic of the torus. It is possible to prove that is always equal to the Euler characteristic, in any dimension, for any closed compact manifold. In the next picture, we can see that, indeed, for a sphere , we get and for a surface of genus g, one has .
4.4. Cellular (Co)homology
Another way to look at homology (and then cohomology by duality, as usual) is to look for a cellular decomposition of our surface, [102]. This means that we have to obtain the surface (up to deformations preserving the topology) by gluing discs of different dimensions. A disc is meant to be a full ball in a given dimension, so a zero-dimensional disc is a point and a one-dimensional disc is a segment. The rule is that one starts from the lower dimensional discs and then glues the boundaries of the successive dimensional discs to the lower dimensional structure obtained previously. For example, one can get a sphere starting from a 0-cell and a 2-cell, gluing the boundary of the two cell to the point (Figure 12).
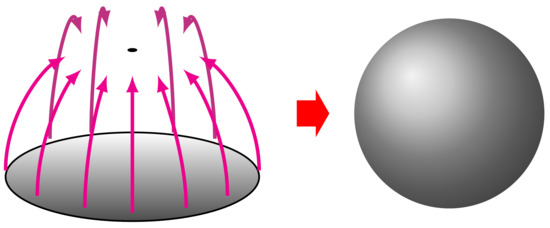
Figure 12.
A cellular decomposition of the sphere: a disc is glued to a point.
Alternatively, starting from a point, a segment and two discs, one can do so by gluing the boundaries of the segments to the point (getting ) and gluing the boundaries of the two 2-cells to (Figure 13).
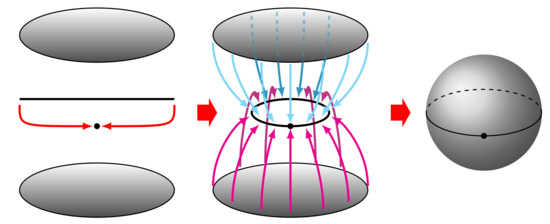
Figure 13.
A different cellular decomposition of the sphere.
These are different constructions of gluing discs, and we can think many others. The point is that if we indicate with the numbers of cells of dimension n, then we get for the sphere
independently of the construction. Notice that, again, it coincides with the Euler characteristic, and, again, it is not by chance but it is a general result: the cellular decomposition gives us another way to compute the Euler characteristic. In Figure 14, it is shown how to get a genus g surface by gluing a point, segments and a 2-disc.
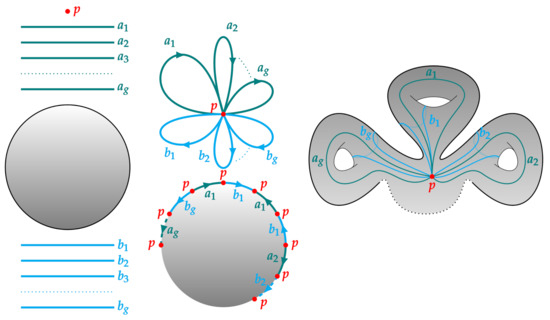
Figure 14.
A cellular decomposition of a genus g surface. All the boundaries of the one dimensional cells are glued to a point, giving a one-dimensional skeleton. Then the boundary of the two-dimensional disc is glued to the skeleton, gluing the red points to p and the remaining parts to the corresponding lines (two segments for each curve) by respecting the drawn orientations.
Again, we see that
4.5. de Rham Cohomology
Finally, we want just to recall what is probably the most commonly known cohomology, which is the de Rham cohomology; see Reference [103]. On a smooth surface, we can have 0-forms (functions), 1-forms, and 2-forms. The external differential maps k-forms into -forms. A k-form is said to be closed if , while it is called exact if for a -form. An exact form is also closed since . This is an obvious consequence of the Schwartz’s lemma for double derivatives. Therefore, exact forms generate a subspace of closed forms. The de Rham cohomology group of degree k is the space of closed k-forms identified up to exact forms. If are the k-forms:
where if and only if for some . It turns out that, under reasonable hypotheses, has finite dimension as a real vector space. Its dimension is called the k-th Betty number of S and is a topological invariant. For , the closed forms are the locally constant functions. They are closed but not exact, so is the space of locally constant functions. If S is connected, any constant function is just identified by its value, so and . On a bidimensional surface, any 2-form is closed. Suppose that S is connected and closed (i.e., has no boundary) and that are two equivalent 2-forms. Then, for a 1-form, and using Stokes theorem:
so two equivalent forms have the same integral. The opposite is also true, and we get that for a closed connected surface, . It is difficult but possible to prove that if the surface has genus g, then . Since are invariants, it follows that
is also an invariant. We see that if , we get
Once more, this is a general result. We can now stop here, we will discuss a little bit further about the relation of the de Rham cohomology with other cohomologies in a more general setting (where we will also see a further cohomology, the singular cohomology).
5. Integrals and Cohomologies
While calculus with functions of one real variable gives us the impression of a strict relation between differential and integral calculus, it is pretty evident that when passing to more variables, or just to one complex variable, things change drastically, and the theory of integration looks deeply different. Indeed, the sensitivity of integration to global questions quickly becomes manifest. Integration looks more related to (co)homology and Hodge theory. In this section, we summarize some facts we probably will have to consider in a full program of investigation about the geometry underlying Feynman integrals. Of course, we cannot be exhaustive, but our aim is to be at least suggestive.
A convenient way to see it is to pass through complete elliptic integrals. These are one-dimensional integrals whose structure resembles that of Feynman integrals, hiding the main characterizations we need, and are also the origin of larger dimensional integration theory, starting from Poincaré and developed by Lefschetz and Hodge [104,105,106,107,108].
5.1. Elliptic Integrals
Consider the elliptic integrals of first and second kind, Reference [109]:
It is known that these integrals cannot be expressed in terms of elementary functions of k. In both cases, the last integral extends between two branch points of the integrands. There are four branch points, at and , . As the integrand is a multivalued function, we can extend it to a single-valued function on a Riemann surface. To this end, we can first extend x to z on the complex plane, with two cuts, one from to 1, the other from to . Notice that in both cases, the integrand is regular at infinity, so we can think at it as defined on the Riemann sphere with the two given cuts. If we try to cross one of the cuts, the function flips the sign and the only way to keep the function single-valued is to assume that we end up to a second copy of the cut Riemann sphere, where at the doubled point it takes the same value as on the original sphere, but with the opposite sign. With this standard construction, we end up with a well-defined single-valued function on a two-dimensional surface obtained by gluing the edges of each cut of a sphere to the edges of the corresponding cut on the second sphere. This is topologically a torus, that is, a Riemann surface of genus two or, from the complex point of view, an elliptic curve; Figure 15.
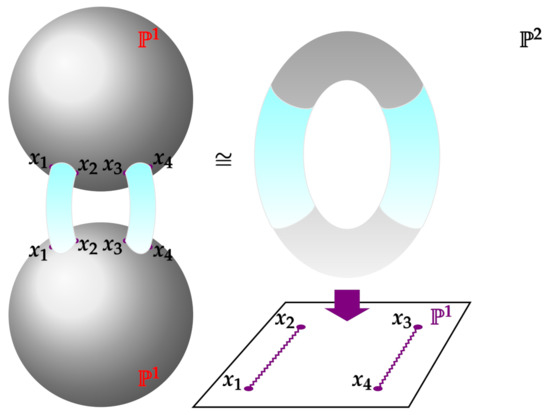
Figure 15.
Two double-cut planes glued along the cuts are topologically equivalent to a torus.
We see that the integrals can then be thought as along the edge of the cut where the root is positive. If we go back integrating along the other edge of the cut, we get the same result. Since the whole cut traveled this way is a closed path along the elliptic curve, we can write
Here, is one of the generators of the first homology group of the elliptic curve. In this form, the elliptic integrals looks like a 1-form integrated over a closed cycle. Since the first homology group of an elliptic curve is two-dimensional, there is a second independent curve, which we can represent, for example, as the path going from to on one of the spheres and coming back from the other sphere. This second path, say , intersects transversally at a point. After having chosen an orientation, we can define the intersection product , meaning that the velocities and at the intersection point form a basis for the tangent space correctly oriented. Of course this means that . However, in place of considering the same integral changing with , let us first consider the other canonical integrals and , with . These integrals are related to the previous ones by the Legendre’s quadratic relation
To understand the meaning of this quadratic relation, it is convenient to pass to a more canonical description of the integrals of first and second kind. Consider an integral of the form
where P is a fourth-order polynomial with simple roots, among which there are and (not necessarily real). Since the integrand is not single-valued, this integral depends on the specification of the path connecting the two roots. However, it is clear that we can work exactly as before, so that we can write3
where is a closed path on the genus one complex line defined by the equation
in .4 Notice that in the form (76), we are working just on a projected component (this is the reason why the branch points appear). On , there is the action of the Möbius fractional group , which allows us to move three points in any desired position. It works as follows. Let z be the inhomogeneous coordinate on , and
Its action on z is thus defined by
For , we se that gives the same action as A, so it reduces to an action of the projective group . By moving one of the roots to infinity, it is always possible to bring the integral in the form , where
where now the elliptic curve is defined by the Weierstrass normal form5 [110]
Another choice is to bring it in the Legendre normal form
that is, relating it to the complete elliptic integral of the first kind. We are interested in the Weierstrass form now. Associated with it, the elliptic integrals of the second kind can be written in the form
Let us now quickly see how and are related to the theory of Weierstrass ℘ and elliptic functions. For and , two complex numbers such that
has strictly positive imaginary part, one defines the Weierstrass gamma function ℘ as [111]
where are relative integers with . It is biperiodic, with periods and , and satisfies the differential equation
with
The Weierstrass function is
It is then clear that . However, is not biperiodic, but it satisfies the relations
with . In this way, the Legendre’s quadratic relation takes the form
which can be easily proven after integrating along a fundamental parallelogram centered at 0, with fundamental periods as edges [111]. This means that the rectangle is , with
see Figure 16.
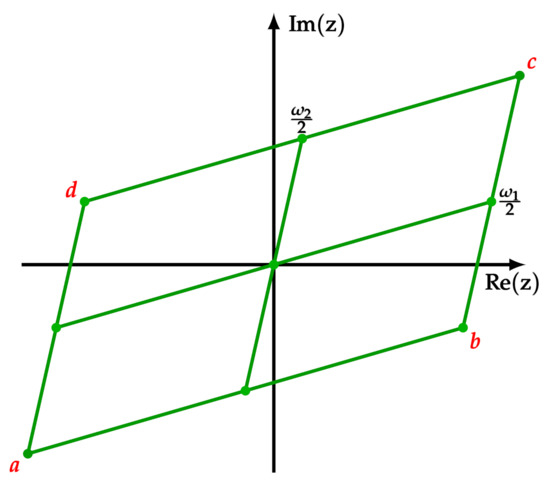
Figure 16.
Fundamental parallelogram.
Now, in the fundamental region, the function z has a unique simple pole, located in , with residue 1. Therefore, we can write
On the other hand, we have that
which imply
and
Inserted in (96) we get
which is the assertion.
Finally, it is also possible to prove (but we omit the proof) that
where are obtained by replacing with , so we can further rewrite the Legendre’s relation in the form
It is in this form that the Legendre’s relation has its deepest geometrical meaning.
5.2. Riemann’s Bilinear Relations and Intersections
To interpret the above result, we pass to a more general situation and consider an oriented Riemann surface of genus (the surface of a donut with g holes or a sphere with g handles). It is well known, from Reference [102], Lemma 3.14, that we can realize it from a -gone with edges, in clockwise order, , where means the edge is oriented counterclockwise, gluing each edge with its “inverse”, according to the orientation. Any and any is a closed curve and they satisfy the intersection product relations
These curves are homotopically distinct and are a (canonical) basis for the first homology group . Given a closed 1-form on , one defines its periods relative to the given basis as
Given two closed forms and , using Stokes’s theorem and closures, it is not difficult to prove that the following identity is always true
Proof.
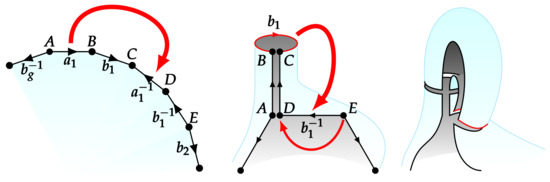
Assume that is a closed oriented Riemann surface of genus g. Now, let us notice that if we cut along the representatives and , we get the -gon associated with the word , see Figure 17
Figure 17.
Riemann surfaces from the fundamental -gon.
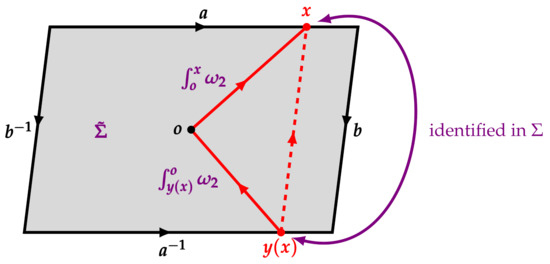
This polygon is simply connected, so any closed form restricted to it is exact. In particular, this is true for , which has the form , and for , a well defined function on (but not on ). More precisely, we can fix a point o in (for example the center). Since the polygon is convex, any is connected to o by a segment, and we can write
where the integration is intended along the segment. Now, if is exact and is closed (indeed exact too on the simply connected domain), then is also exact. Indeed, the 1-form has the property that , and is well defined on . Finally, since as sets
together with and , are subsets of vanishing measure of and , respectively, we have
where the main trick has been to rewrite the integral over a region where the integrand is exact, in order to be able to use the Stokes theorem. Since the boundary is the (oriented) union of the edges of the polygon, we then have
Now, consider the integrals
The forms and are well-defined on , so they take the same values on the identified points of and . If is the point on which identifies with in gluing to form , then, noticing that is oriented in the opposite sense of , we can write
The sum of the two integrals of is just equivalent to the integral along a curve from to x, which is homotopically equivalent to traveling in the opposite orientation (from to ); see Figure 18.
Figure 18.
Construction of the integral in case .
Therefore,
is independent of x. So, we can write
Let us now see what changes for the remaining integrals
Reasoning as above, if is the point on identified with x on when constructing from , we can write
Now, the path on becomes a path homotopic to traveled in the opposite direction, so it is homotopic to and, therefore
Thus,
Since
we get the assertion. □
This wonderful formula, known as Riemann’s bilinear relations, gives (103) as a very particular case and provides the geometric interpretation we were looking for. Indeed, it leads to the concept of intersection number between closed forms, or, as we will see in a moment, between cohomology cocycles. The transversality of the homology curves is now replaced by the fact that in any given point, is non-degenerate as a bilinear (or multilinear) map on the tangent space to . The directions where vanishes define locally a curve. Similarly, defines locally a second curve. These two curves meet transversally in the given point. These curves are essentially the Poincaré duals of the forms, and this naive description shows its role in providing a geometrical interpretation of the intersection number between forms. When is provided by a Riemannian metric , then, in local coordinates, we can write
where is the usual Levi-Civita tensor density, and Einstein’s summation convention is adopted. We set
the Hodge dual of and identify as the volume element on . Finally, since closed forms are locally exact, in a small enough neighborhood we can write for a potential . Notice that the Poincaré dual of is thus locally represented by the level curves . In the given neighborhood, we get
where we used the fact that closed implies . If as a small neighborhood we take a small rectangle Q with edges with a and c along level curves for (with values and ), while b and d are orthogonal, then
and being the external normals to c and a, respectively. This integral is thus determined by the flux of the vector field , Hodge dual to , through the equipotential surfaces (lines) of . Notice that even in an extremal case when the rectangle can be extended until wrapping the surface so that6 , then we would get
in general with despite c and a coinciding, since is not monodromic and takes a different value after wrapping along a closed loop. Indeed, in this case is nothing but the period of along the closed path. In general, it is not possible to extend even c to a closed path, and our naive analysis then stops here. However, it is clear that its correct formulation is given exactly by the Riemann’s bilinear formula, which generalizes this vision in terms of fluxes (of the Hodge dual of ) through the Poincaré dual of .
Now, it is time to be a little bit more precise. If we modify by an exact form , its periods do not change7. On the other hand, since is closed too,
and by Stokes’s theorem and the fact that has no boundary, we see that the exact term does not contribute to the l.h.s. integral. The same holds if we modify by an exact form. This means that this formula depends only on the cohomology classes of and . From (125), we also see that if we consider the cohomology class of , then, it depends only on the classes and and not specifically on the forms. So, this gives rise to a well-defined bilinear antisymmetric map
called the cup product. The above formula can then be written as
The l.h.s. formula is called the intersection product of the two classes (or forms). This is because it is in a sense a dual of the intersection formula in homology. Indeed, let us consider the dual basis to the canonical one, that is, a set of closed one-forms , , such that
Thus,
which has exactly the same form of the intersection products among the elements of the homology basis. This is our final interpretation of the Legendre’s bilinear Formula (103): it gives the intersection product between the first kind and the second kind differentials. In general, after selecting a basis , of , the matrix with elements
is invertible. Any other element in can be written as
with . Therefore,
so that
where are the matrix elements of the inverse matrix . On the other hand, for , the periods of are
Thus, we see that after the intersection product is given, for a path homologically equal to , , our integral is given by
So, the only integrals we have to compute are , which we can call the “master integrals.” Notice that this expression resembles the decomposition Formulas (45).
At this point we may wonder how much all this can be generalized to higher dimensions. To get some insight, let us now present some very general considerations, without any pretense of completeness, but just with the aim to outline the main concepts one would need to deepen, referring to the appropriate literature.
Remark 1.
In the literature, Riemann’s bilinear relations usually are not exactly (106), but rather one of its consequences ([102], Th.12.2): if , are two holomorphic forms on a genus g closed oriented Riemann surface Σ, and , a canonical basis of , then the following relations are true:
where means the complex conjugate of z.
5.3. A Twisted Version
We want now to consider a situation that is a little bit more involved. In place of real or complex valued forms over our Riemann surface , let us consider twisted differential forms taking value in a line bundle . This is a bundle whose fibres are copies of . To it we can associate a dual line bundle , which has the following property: if and are sections of and , respectively, then, defines a function . In particular, if is a section of , then is a section of . With this in mind, we say that is a -valued twisted k-form if for any given section u of , then is a -valued k-form. We will call a left k-form, and the space of left k-forms is
and we write
We say that is flat if it admits a global section. When it happens, it is clear that is also flat. Assume that u is a global section of : we call it the twist. Given a twist, on we can put a structure of ring as follows. For , we define
in harmony with the condition , required by the mapping , . Notice that are the sections of . u also allows us to introduce a connection on that induces a covariant derivative
Concretely,
It is a flat connection, since it satisfies as one can easily check. This allows us to say that is closed if and exact if for a left form of lower rank. Notice that these definitions imply
if has degree k.
In a similar way, we can define the right forms as the twisted forms with value in , simply by exchanging , , . A right form will be called , when necessary, to distinguish it from a left form. Of course, a right form is closed if and exact if .
A first interesting fact is that the standard wedge product between a left form and a right form satisfies
where we used that . In particular, if and are covariantly closed, then, is closed in the canonical sense. Now, suppose that and are 1-forms, well defined over the Riemann surface . As in the previous sections, we can cut it to , the fundamental -gone, which is simply connected and, indeed, star shaped with respect to an internal point o. Therefore, for any , we can take the segment and consider the function
It is well defined on and satisfies
5.4. Perversities and Thimbles
Now, we can address the main point. While we previously related our integrals just to the cohomology of the Riemann surface defined by the polynomial, the situation is more involved in the general case of a Feynman integral. The point is that the section u is represented by the Baikov polynomial as . We assume . This section has zeros (or singular points if ) in the zeros of , so it does not define a global section of a line bundle over the whole domain of the polynomial, but just in the complement of its zeros. Furthermore, if the integration domain goes towards infinity, it must be chosen so that the integral converges (so along paths where goes to 0 or to ∞, according to whether is positive or negative). This looks like it says that the form becomes trivial around infinity, to make sense to the integral. This leads us to think that the right (co)homology to be considered is the one of relative to infinity, where Z is the zero locus of the polynomial. This is indeed the result of Francis Pham, who proved that the right homology is the relative homology , B being a relative neighborhood of infinity: where N is “large enough” [112,113].
The point is that one has to manage the homological tools when singularities are present. Let us consider as an illustrative example the integral
. The integral has to converge, so has to avoid the zeros of the polynomial, but can reach the infinity if and the opposite if . The zeros of the polynomials are branch points, and we have to fix branch cuts to fix the integrand. Moreover, the map has two critical points, which are the points where the gradient vanishes. Let us briefly see why this could be interesting. If we want to have an intuition on the cohomology to be used, we can start thinking that it is not expected to depend on the exact value of . Therefore, after rewriting the integral in the form
we can estimate it for very large . This can be done by means of the saddle point method, so that the integral is dominated by the saddle points of the exponent, which are indeed the critical points of . Depending on , one has then to follow the steepest descent or ascent lines, in such a way that the integrand goes to zero. For example, if we write , where is a critical point, then
and we see that the path passing from the saddle point is conveniently chosen so that the phase is constant so as to avoid oscillations. Thus, the best choice is the paths having the constant phase, fixed by the critical point. Then, one chooses the direction such to move from the critical value to infinity or to zero, depending on the case if the path is allowed to reach infinity or zero (in our example, depending on whether or ). Notice that, having fixed the phase, choosing a direction to move away from the critical point, the absolute value of the integrand moves monotonically toward 0 or ∞. Furthermore, since we have to move along these paths, we have to choose the cuts so that they do not coincide with (part of) the constant-phase integration paths. Now that we have got hint, let us go back to the explicit case in some detail.
The branch points are . The critical points solve , so that they are . If we coordinatize the target space of with t, then the there are three images of the branch points and the critical points in the target space:
The phases determined by are thus . Therefore, we choose the cuts with phase 0. Writing , this means
so that the cuts are defined by , . These are
see Figure 19. In a similar way, we can determine the descent/ascent paths from the critical points.
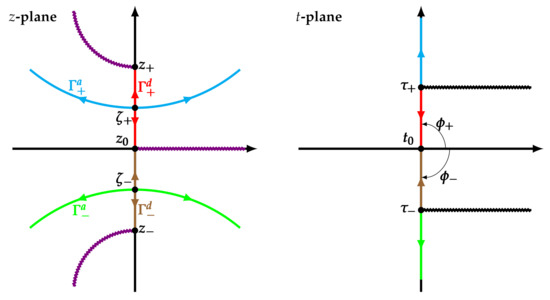
Figure 19.
Cuts, ascent paths and descent paths.
Through the paths are defined by the phase , which correspond to , . These give for the paths
for the paths
These are curves from infinity to infinity around the cuts (ascent paths), or from a zero to another one (descent paths). They are called Lefschetz thimbles, for a reason that will become clear soon. Now we want to understand a little better what we have done just inspired by saddle point methods. To this hand, let us consider as a map defining a fibration over . The fiber over t is generically given by a set of 3 points. The exceptions are the critical points where the polynomial has double roots, so the fiber is made by just 2 points. For the generic fiber at t (which is zero dimensional), the cohomology is , and is invariant when t varies, so we are in trouble if we move to a critical point. Therefore, to manage this difficulty, it is convenient to restrict this “fibration” of cohomology groups to and look at what happens if we move around the critical values. To see this, notice that if is a primitive third root of 1, then
from which we can easily see what happens to its (co)homology when we move on a loop around the critical points: since vanishes at , it changes sign in moving along the loop, and we see that the upper component is invariant, while the lowest components are interchanged. Therefore, on , the monodromy action (the action of moving around the points) around is given by the matrices
The badness of the fibration is measured by these (here coincident) monodromy matrices. The point is that has fixed points given by the eigenspaces of corresponding to the eigenvalue 1. These define the spaces of invariants
Their complement are the spaces of coinvariants
On them, the monodromies act as minus the identity. The strategy for capturing the right cohomology is to restrict the fibration of cohomologies, keeping only the coinvariant parts and the information of the action of the monodromies. Notice that these are irreducible non-trivial representations of , the first homotopy group (generated by the loops around the critical values). This “almost fibration” with specification of monodromy constrained structures at singular points substantially describes what is called a perverse sheaf. The family of coinvariant (co)homology elements can be then interpreted as follows. In the homology of , they can be thought as
with . The generator is for . Then when t varies from a singular point to infinity (or to 0), we see that these points collapse at the critical point, collapsing to zero also as an element of , since we get the same point with total coefficient .8 These correspond to the thimbles and, are called vanishing cycles. Notice that the pair of points are 0-dimensional cycles. For a polynomial in n variables, one gets that the preimages of t are generically , the total space of the tangent bundle of a sphere, which are homologically equivalent to spheres . The (perverse) cohomology generated as such is represented by a union of spheres when t varies, for example, from a critical value to ∞ along a line . The result is homotopic to a cylinder , whose face at the end corresponding to the critical value collapses to a point. This may be thought to have the shape of a thimble.
Of course, a rigorous version of this construction in a general setting requires the use of more sophisticated mathematical tools.
6. Some General Constructions
In this section, we want to discuss some relations between Feynman integrals, homologies and cohomologies. Even if we avoid entering into details, we illustrate the main ideas on how to deal with singularities by passing to simplistic (co)homologies, while our original problem remains the one of computing integrals of differential forms. Therefore, we will start by recalling some relations among the main (co)homologies we will need to consider in the successive subsections. We will not provide notions but rather only rough ideas and some literature. However, we hope to make this section at least readable.
6.1. On Cohomologies and de Rham Theorem
In general, for a given space, there can be several associated homologies depending on the structures one is considering. We are of course interested in the de Rham cohomology, which is well defined on smooth manifolds as the quotient of closed forms with exact forms. However, there are other (co)homologies that are of interest for concrete calculations. For the definitions reported below and any further lecture, we refer to [102,114].
6.1.1. Singular (Co)homology
One of the most general is singular homology. A k-simplex is the smallest convex subset of (N > k) generated by points in general position (so it has dimension k). If , are the generating points, it is convenient to use the notation . Then, the j-th face of the simplex is the -simplex , where the means omission of the point. If X is a topological space, then a singular k-simplex in X is a pair , where is a continuous map. A singular k-chain is a formal finite combination of singular k-simplexes , , where is an abelian group, for us, . They form the space of singular chains. The boundary of a singular simplex is the singular -chain
This defines by -linear extension, a sequence of -linear maps
It follows that and one can define the singular homology groups
Similarly, we can define a singular k-cochain as a linear map
that form the -linear space , on which acts the coboundary operator
From these, one defines the singular cohomology groups
Remark 2.
Replacing simplexes with hypercubes, one gets the singular cubic (co)homology. However, this gives a non-normalized cohomology [102] (also called a generalized cohomology), that is, a cohomology that does not satisfy the condition for and p a point.
6.1.2. Simplicial (co)homology
This is less general and is first defined for simplicial complexes. A simplicial complex is a collection of simplexes such that if a simplex is in the complex, then all its faces are also in, and, moreover, two simplexes in the collection can intersect in one and only one common sub-face of a given dimension. It is called finite if composed of a finite number of simplexes, while it is locally finite if for any point there is a small neighbourhood intersecting just a finite number of simplexes. Given a simplicial complex , one defines its simplicial k-chains as the formal combinations , , which define the space . Defining the boundary
we get linear maps
which satisfy and allow to define the simplicial homology groups
Similarly, we can define a simplicial k-cochain as a linear map
that forms the -linear space , on which the following the coboundary operator acts:
From these, one defines the simplicial cohomology groups
This construction can then be extended to the case of a topological space X that admits triangulations. If a given triangulation T can be homotopically deformed to become homeomorphic to a simplicial complex , then we can define the simplicial homology groups of X as
These are well defined, since it can be proved that the resulting groups are independent of the triangulation T. An important result is that the following isomorphisms (for spaces admitting simplicial homology) hold true:
For a proof, see [102,114].
6.1.3. De Rham Theorem
Now we can state the following important result ([102,114,115,116,117,118]):
Theorem 1
(de Rham Theorem). If X is a smooth manifold and , then
An important remark for us is that the same theorem can be extended by weakening the hypothesis and assuming that X admits singularities and more in general a (Whitney) stratification or the structure of a stratifold. See [119] and references therein.
This result allows us to move to simplicial (co)homology to simplify abstract constructions as we did in Section 5. However, it is also helpful for simplifying certain computations like the one of Betti number and the Euler characteristic. Here we recall that the Betti numbers of X are the numbers
while the Euler characteristic of X is the number
where .
Finally, we remark that further cohomologies can be introduced, like for example relative (co)homologies , cellular (co)homologies, Čech and sheaf (see [102]), or generalized (co)homologies, such as K-theories or (co)bordisms. We demand any further reading to the standard literature.
6.2. Cup Products and Intersections on Smooth Manifolds
In the example of closed one-forms on a compact closed Riemann surface , we have seen that the cup product can be interpreted as the intersection product between two one-forms, in a sense, dual to the intersection product among homological curves (1-cycles), which is probably more intuitive. Now, we want to understand how much this notion can be generalized. To this hand we will refer to the lecture in [120].
Let be an m-dimensional oriented compact smooth manifold. Furthermore, we assume that and are two smooth submanifolds of dimensions and , respectively. We say that they have transversal intersection if , and for any the union of the embeddings of is the whole . In particular, this implies that , which is the dimension of the intersection. We have to take into account the orientation. We say that the intersection is oriented on a given connected component of N if it is possible to choose a basis , such that:
- We can complete it to an oriented basis according to the orientation of ;
- We can complete it to an oriented basis according to the orientation of ;
- is an oriented basis for according to the orientation of M.
See Figure 20 for a pictorial representation.
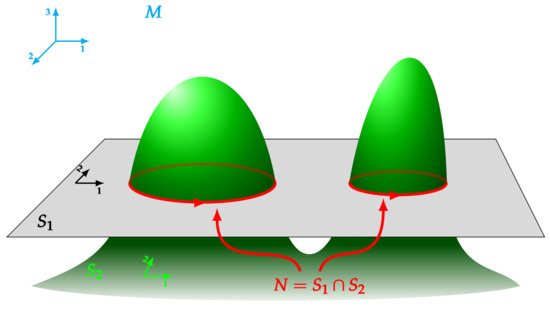
Figure 20.
Intersection between two oriented surfaces and in a three-dimensional oriented manifold M.
It is clear that it depends only on the connected component and not on the specific point. Therefore, defines the orientation of the intersection. We can consider the homology class associated with N, in the sense of simplicial homology.9 It can be shown that it depends only on the homology classes of , so it gives a map , each time .
In particular, when , N is just the union of a set of isolated points. This set is finite since M is compact and defines an element of (since M is connected). Thus, we can associate the intersection product with a number representing such an element. This can be done as follows. If is the sign associated with , we set
It is well defined, since N is finite, and it can be shown to depend on the homology classes only. So, it shows the connection with the intersection product we met in the case of a Riemann surface.
However, let us stay general for the moment. There is another interesting map to be considered in simplicial (co)homology in order to go ahead: the cap product,
defined in such the way that for any given , we must have . Then, let be the class generated by M, also called the fundamental class. Fixing , we get a map
Then, this theorem holds ([121], Th. 1.1.3):
Theorem 2
(Poincaré duality). If M is a connected, closed, and oriented topological manifold, then is an isomorphism for all integers j.
The most important consequence of this theorem, at least as regards the applications we are interested in, is the following theorem ([120], Th. 1.1):
Theorem 3.
Assume M is a compact, connected, closed smooth manifold and let smooth submanifolds of dimension , that (up to an homological deformation) have transversal intersection. Then, it holds that
For a proof, see [120]. This theorem thus states that cup and cap products are dual under the Poincaré map. So, it provides a remarkable generalization of the results discussed for Riemann surfaces. We described it in the case of simplicial homology, but it clearly works as well if we tensorize with , and then we can use the isomorphism to get it for the case of the de Rham cohomology (where the cup product is induced by the wedge product), which better matches with the previous section.
However, we are not yet satisfied this, since we had to make use of smoothness, but in considering the general integrals we are interested in, we generically have to consider manifolds with singularities, which may not be homologous to smooth manifolds, so we need to explore further generalizations.
6.3. Lefschetz Theorems, Hodge-Riemann Bilinear Relations and Perversities
We want to go further in our tour of intersection theory by looking at finer structures. We will follow mainly [122], indicating some further lectures explicitly when necessary.
First, let us go back to the case of Riemann surfaces. These are complex curves of complex dimension 1, and smooth real surfaces of real dimension 2. They can be embedded in a projective space; for example, the elliptic curves can be embedded in as the zero locus of a quartic or cubic polynomial, such as
in local non homogeneous coordinates. If in the above equation in we replace with a polynomial of degree or ; we get an hyperelliptic complex curve of genus g. They are therefore algebraic varieties that are zeros of polynomial functions in some real or complex space. When an algebraic variety can be embedded in a projective space for some N, then it is called a projective variety. Furthermore, we can notice that the one forms on a Riemann surface , in local complex coordinates z and , have the general form
with differential
Any two form is
and it is closed, for dimensional reasons. It is cohomologically trivial if it has the form (192). is also a Kähler manifold, which means the following. It is always possible to put on it a Hermitian metric
that defines at any point p of a sesquilinear map
such that
for any . Its real part defines a Riemannian metric on , while its imaginary part defines a two form
which is a closed form, called the Kähler form. The same construction can be made in higher dimensions, with the only difference being that in general the Kähler form is not automatically closed. When it is, the complex manifold is said to be a Kähler manifold. It is possible to prove that for a Kähler manifold M, in a local coordinate patch U, it is always possible to find a real-valued function , called the Kähler potential, such that
An example is the complex projective manifolds , that, in non-homogeneous coordinates , admit the Kähler potential
generating the Fubini study Hermitian metric
Any projective manifold is a Kähler manifold, since it inherits a Kähler structure after restriction of the Fubini study of the ambient space in which it is embedded.
The cohomology of a Kähler manifold of complex dimension m has a nice structure, called a Hodge structure. For any , the cohomology group admits a direct decomposition
where p and q run in , and the elements of are represented by closed forms of the type
For example, for connected Riemann surfaces of genus g we have
In particular, is generated by g holomorphic forms, which for an hyperelliptic curve in
are
is generated by the Kähler form, which is also real valued, .
Now, unfortunately, it is time to become more abstract. Given a cohomology group of any kind, let us assume that it as a finitely generated abelian group H over , and, following [122], let use the notation , . We say that H carries a pure Hodge structure of weight k if there is a decomposition of abelian groups
An equivalent formulation is to say that H admits a decreasing Hodge Filtration, that is, a family of abelian subgroups of with the properties
Indeed, the equivalence is read by the relations
On , there is a real action of given by for and extended by linearity. In particular, is called the Weyl map. A polarization on the pure Hodge structure is a real bilinear form Q on , which is invariant under the action of and such that
is symmetric and positive definite. After extending Q over , one gets that for a non vanishing .
Now, consider a non singular algebraic projective variety of dimension m, (for instance a projective manifold). Let H be a generic hyperplane in . Then, defines an element of , whose Poincaré dual is , see [121]. We then define the Lefschetz map
The degree k primitive vector spaces are the subspaces defined by . Finally, on let us define the quadratic form
Then, is a pure Hodge structure of weight k and is a rational hodge structure of weight k. Then we have the following important properties ([122], Th.5.2.1).
Theorem 4
(Hard Lefschetz Theorem). With the above notations, the maps
are isomorphisms.
Theorem 5
(Primitive Lefschetz decomposition). For , one has the decomposition
Moreover, for any given j, is a pure Hodge substructure of weight k, and for any , and are -orthogonal.
Theorem 6
(Hodge-Riemann bilinear relations). For any , is a polarization for the pure Hodge structure . In particular, after complexification,
so it is strictly positive definite.
This result seems to give us a very broad generalization of the properties we met for integrals along one-dimensional cycles on a Riemann surface. However, again, it is not enough, since we had to require for X to be a nonsingular variety. The simplest example is . Its first cohomology group is obviously one-dimensional, and this fact is incompatible with the existence of a pure Hodge structure. Indeed, assuming has a pure Hodge structure, then the relation implies
so it must be even-dimensional.
Since we have to work with general Feynman integrals, we cannot avoid working with singular varieties, so we need to overcome this difficulty. Luckily, this has been done throughout the years, passing from Weyl, Serre, Grothendieck, and finally solved by Deligne [123,124,125], who proved the existence of a mixed Hodge structure on the when X is an arbitrary algebraic complex variety. This means that, given X of complex dimension m and , it is always possible to find two filtrations:
- A decreasing filtration , called the Hodge filtration, such that
- An increasing filtration , called the Weight filtration, such that
which have the following property. On the complexification of each graded part of , induces a decreasing filtration that endows the pieces
with a pure Hodge structure of weight j. We do not intend to delve further into these concepts and direct the reader to [123] for details.
At this point, in order to define intersection theory, one has essentially to tackle the problem of how to define intersections of cycles that may contain singularities or pass through a singular region. To get an idea, let us follow the nice exposition in [121], Chapter 1. Let us consider a two-dimensional pinched torus W, which looks something like a würstel bent over and glued at the tips just at one point p. It is clear that on this surface, a loop around the hole is a non-trivial generator for (but pass through the singularity), while a loop L wounding the “würstel” shrinks down to a point when moved to the gluing point p (the singularity), Figure 21.
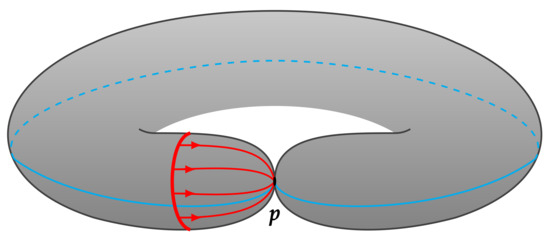
Figure 21.
A singular torus.
So, is one-dimensional and the pure Hodge structure is lost. A relevant observation is that if we think at the singular point p as a zero-dimensional representative of , it meets the loop L non-transversally. This situation repeats for higher dimensional varieties, where singularities can be much worse. A strategy is to construct more refined (co)homologies but starting from the simplicial ones and restricting the allowed (co)chains. One idea is first to generate a homology starting from a simplicial one where only triangulations giving locally finite chains are allowed (so that any point admits a small boundary that intersects only a finite number of cells of the chain). This construction defines the Borel-Moore homology groups [121]. Tensoring with gives the isomorphism of the compactly supported cohomology, whose cochains (or closed k-forms) have compact support. Assume now that singularities define an increasing filtration of X, that is, a sequence of subvarieties
where the , are the real j-dimensional singular sub loci, called the strata, of which the largest one has at least real codimension 2, and is required to be dense in X. With this in mind, we can further refine the homology by allowing only triangulations, giving locally finite k-chains whose support intersects all strata transversally. We call the obtained homology group. A theorem by McCrory ([121], Th. 2.3.2, [126]), then provides the isomorphism . Assuming that (in a suitable sense, see [121]) X is oriented, we can use cap product with the fundamental class to map into , the last term being the locally finite simplicial homology. However, since X is singular, the Poincaré map is no longer an isomorphism. Therefore, and are not isomorphic, the reason essentially being that, in general, the locally finite cycles cannot be deformed, so to have transversal intersection with all strata. For example, this is what happened in our example of the “glued würstel”. Therefore, one needs to do a final refinement, in order to get a correct intersection theory together with a good Poincaré duality. This is obtained by restricting which chains can meet the singular locus, if not transversally.
The first important request is that any chain has to meet transversally. For algebraic varieties of complex dimension 1, that is all. For example, in the case of our glued würstel, this just implies that the loop around the hole is forbidden. Thus, and the perverse homology of the singular surface is the same as for the two dimensional sphere. Indeed, the singularity in this case is non-normal, in the sense that if we take a small neighborhood of the singular point p and keep the point out, the neighborhood separates into two disconnected components. We can normalize the surface by adding the lacking point separately to each one of the two disconnected parts. In other words we unglue the würstel, which becomes a usual one, with the topology of . These kinds of singularity are thus simply solved by normalization, and for the case of complex dimensions, two things remain relatively simple.
However, for higher-dimensional X, one has to consider also intersection with higher codimensional singularities. Here is where one introduces a perversity, [127,128,129,130,131,132,133,134,135]:
Definition 1.
A perversity is a function
satisfying the conditions
In particular, is called the top perversity, while is the zero perversity. Furthermore, , , is called the lower-middle perversity, and is the upper-middle perversity.
Given a perversity p, an allowed k-chain is a locally finite chain whose support satisfies
for all . The homology groups generated as such are called the BM intersection homology groups with perversity p of X, . If in place of locally finite chains one starts with finite chains, then one obtains the homology groups with perversity p, .
With these notions, one has the following version of the Poincaré duality ([121], Th.2.6.1):
Theorem 7
(Poincaré duality). If X is an algebraic manifold of complex dimension m, whose singularities define a filtration as above, and p and are two complementary perversities, which means , then there is a a non-degenerate bilinear pairing
This theorem provides the necessary definition of (-valued) intersection number. A construction that proves homological invariance and independence of choices, as well as calculability, passes through sheaf theory and its generalizations. Analyzing such a formulation goes too far beyond the aim of our discussion. However, we want just to add some remarks for those with at least a basic knowledge on sheaf theory (a good introduction is found in [121], Chapter 4). In the sheaf-theoretical formulation, a particular role is played by Local Systems, which are locally constant sheaves, that is, any sheaf over X, such that its local restriction to a small neighborhood of any given , , a given A-module. Thus, it turns out to be necessary to work with twisted homologies, which are homologies taking value in a Local System. This leads to work with complexes of sheaves. A main difficulty in doing these is that in such framework often diagrams commute only up to homotopies and not identically. To overcome this problem, one introduces the category , which is essentially the same of the one of complex of sheaves, up to identifications by homotopy. The problem is that one of the main computational instruments, that is, short exact sequences, are lost in passing from the category of complexes of sheaves to . A remedy consists in finding a way to map short exact sequences in into distinguished triangles, from which it is also possible to construct long exact sequences. This leads to the language of derived categories ([121], Chapter 4). This way, one can construct the intersection homology groups .
In place of embarking into the formidably difficult program of analyzing such constructions further, we move on to illustrating a possible strategy to be applied to the more specific situation of computing integrals of the form (2), suggested by M. Kontsevich in a private communication to P. Mastrolia, T. Damour and S.L. Cacciatori, at IHES on January 2020.
6.4. From Feynman Integrals to Intersection Theory
Let us consider (2). In general, we assume that for the sake of simplicity, and .10 Consider the map
This map has critical regions with critical values , . For each t, we can consider the algebraic variety
with . For these t, is smooth and admits a compactification , with projective, open embedding, and is a normal crossing divisor, which means that at any point of it is described by local equations . Thus, starting from , we get a (Deligne) weight filtration, starting from (with of lowest weight 0). When t moves in , we get a variation of mixed Hodge structures on .
Now, these variations of mixed Hodge structures define a perverse sheaf over . Luckily, on complex curves, they can be understood quite easily; we refer to [136] for a nice presentation. A perverse sheaf is not exactly a sheaf but has properties similar to a sheaf, as it can be glued by local data. Furthermore, away from a singular point, it is effectively a sheaf, more precisely a Local System, so on x non-singular, we can think of the relative stalks as a finitely generated module V. Around a singular point, one has to add a monodromy rule around the singular point :
This is the effect of our variation of mixed Hodge monodromy. Let nd the submodule of invariant elements (eigenelements). The exact sequence defines the coinvariant module . Since the monodromy action depends only on the first homotopy group, we can see monodromies as representing the action of the first homotopy group . On , we get an irreducible representation of on a variation of a pure Hodge structure. Thus, it is endowed with a polarization via the Hodge–Riemann bilinear relations. This polarization is symmetric or skew-symmetric, according to the parity of , so we have representations
with G-orthogonal or -symplectic, according to the given parity. Any such irreps determines univocally a local system. Notice that from the Primitive Lefschetz decomposition one can read out the precise structure of the intersection product induced by the polarization.
At this point, one can also determine a basis for the homology underlying the original integral using this perverse extension. We can get a twisted sheaf over , given by the Local System twisted by the perverse monodromies, associated with . The original integral can be thought to be defined on a middle dimensional cycles in a complex m-dimensional variety Y. The cohomology determines a basis of real m-dimensional Lefschetz thimbles in Y, Figure 22, which indeed represent the perverse cohomology structure.
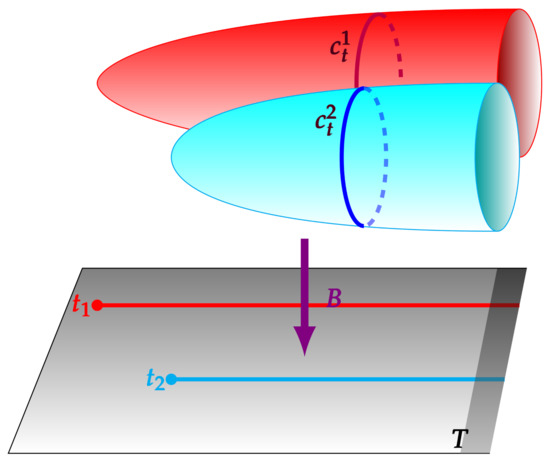
Figure 22.
Thimbles drawn above the plane of .
On , each critical value of B determines a phase of . Draw n lines with such constant phases, passing through the n critical values (so has constant imaginary part) starting from the critical values of B to ∞ or to zero, according Re, or Re. To each line, it corresponds to a family of -dimensional cycles , collapsing to a point in (a collapsing cycle) and going towards a region where assumes larger and larger values. Such cycles are determined by the coinvariant elements in a way similar to the construction we gave in Section 5.4. Fix a large real value , for all ; then corresponds to the region where . The unions
are called Lefschetz thimbles, and result as a basis for the middle homology of Y relative to Z. We remark that such constructions are quite familiar to physicists even if in a different form. Let us define the potential function
so that the integrand becomes
One can evaluate the integral for very small ℏ by using the stationary phase method. Therefore, such an integral is dominated by the stationary points, where
These are the critical points of the polynomial. The valuation of the integral is then dominated by the paths that make the integrand oscillate as little as possible. These are the union of paths such that the phase of the integrand is constant, and that goes to infinity with Re, so that the integrand goes to zero. This means , and we get the thimbles.
Here, we end our mathematical excursus and go back to the practical constructions of Cho, Matsumoto, and others.
7. Computing Intersection Numbers: State of the Art and Open Problems
In this section, we mainly address the practical computation of the coefficients of the master integrals, the so-called intersection numbers.
Intersection numbers between two n-forms and , which have been introduced abstractly in Section 6, are defined by Cho and Matsumoto [74] as
where X is the whole complex space deprived of the hyperplanes corresponding to the poles of and is a map that sends to an equivalent form with compact support. In our particular case, and are twisted cocycles, which implies that the intersection number in Equation (238) is not an integer in general [137].
Notice that if we omitted in Equation (238), then the intersection number would vanish, as both and are holomorphic in the domain of integration X. To understand why this is true, we focus on a 1D description (there is only a single variable z) in order to have a simple notation, but there is no difference in considering a multidimensional example. We consider z to be complex; hence X is without some points corresponding to poles. A certain function can always be split into its real and imaginary part: . Introducing a change of variables
allows to obtain a certain . If f is holomorphic, in order to satisfy the Cauchy–Riemann conditions, after the change of variables, depends only on z: . In general a form can be decomposed as
When we wedge two forms as in Equation (240), only the mixed terms survive; but if the forms involved are holomorphic, the wedge product is null.
Strictly focusing on the twisted cohomology framework, we present in this section a summary of what has been obtained for the computation of intersection numbers so far; in Section 7.4, we give a review of still open problems plus some ideas on how to tackle them.
7.1. Univariate Case
In this section, we show how the intersection number can be evaluated exactly in the case when integrals are defined over only one complex variable. We will refer to the simple derivation that was presented in [76]. Let us consider a 1-form having poles at some points . In order to compute Equation (238), must be constructed explicitly. The key point lies in defining circular regions around each point: to fix ideas, we call and two discs centered in such that ; these discs are defined such that for . We then introduce for each i:
- 1:
- A holomorphic function such that
- 2:
- A function such that
Then can be written as
Notice that in Equation (243), as out of , we are actually not modifying in that region. Inside , , meaning that the whole is subtracted and in the innermost region around the singular points; on the other hand, in the outer ring , is subtracted smoothly. Finally, is an extra term existing only in the ring. Notice that and lie in the same cohomology class, as they are identical up to a covariant derivative of a function.
What is left now is to find the explicit form of obeying Equation (241).
Lemma 1.
Unique existence of .
such that is holomorphic on and on .
Proof.
Consider a 1-form having a pole of order N at ; is a 1-form sharing a pole of , is required to be holomorphic: hence, in terms of the local coordinate variable z near (up to a change of coordinates, we can consider without loss of generality), and it is possible to write
Notice how in (244) and . Then becomes
in which we defined : hence the sum must satisfy the condition , whose bigger value is obtained when m is as small as possible (which is ). This implies that the sum over q goes up to . We are thus led to the identification
□
The intersection number (238) can be rewritten as
where the second equality can be obtained by recalling that the first term vanishes because ; the second term survives where , i.e., in ; the third term is again proportional to and vanishes. Notice that it holds:
This is because the extra terms and vanish, as and are both holomorphic and as is a closed form. By the Stokes theorem, it is possible to rewrite Equation (246) as
Because is a closed path, we can always rewrite Equation (248) as a sum of residues:
7.2. Logarithmic n-Forms
Evaluation of intersection numbers is particularly simple for logarithmic forms. In the univariate case, one can check from Lemma 1 that if has a simple pole, then the function takes the form
In this case, Equation (249) leads to the following formula for the evaluation of the intersection number:
Equation (251) is valid for logarithmic 1-forms, but it can be generalized to logarithmic n-forms. We give only the final result for this case. Let us consider the twisted one-form in the following form:
where the are linear functions in the given variables (hence each defines a certain hyperplane where the twist shows a logarithmic singularity), while . The cocycles instead assume the form
with ; the indexes are ordered such that . In other words, belongs to the n-th twisted cohomology group , where .
With these hypotheses, a recent work [46] has shown that the intersection number between two logarithmic n-forms can also be written as
where is the component of , a enumerates the dimensions involved (the number of variables), and represents the components of the twist along each .
7.3. Multivariate Case: Recursive Method
The main aim now is to be able to compute any intersection number, independently of the order of the poles appearing and the number of dimensions involved. A first attempt follows a recursive approach in the number of variables (we refer to [65,66]). In order to compute an intersection number in variables, the problem can be divided into two steps: calculating the intersection number in variables and then a generalized intersection number depending only on , which will be introduced later. In the 1D case, and are 1-forms, which we can regard as some sort of scalars. Taking into account the existence of independent equivalence classes, it is possible to build vectorial ( and tensorial () objects, with “gauge” transformations written as
The next key idea is to study, for each i, the twisted cohomology group associated to the fibration
and define
In Equation (256) are treated as fixed parameters. Starting from , the goal is to express a cohomology class using a basis of , which is supposed to be known: such a basis is formed by elements , with dual basis such that . Inserting an identity of the form leads to
where
Notice how the coefficients defined in Equation (259) are not unique objects but classes themselves. For example, the coefficient is invariant with respect to the choice within the cohomology class of : a change with being a 2-form would make no difference. This equivalence class is smaller than , which is composed of all the transformations with being a generic-form: thus, the coefficients in Equation (259) represent new equivalence classes overall.
We introduce a new matrix with dimension
which implies
The matrix in Equation (260) allows us to write the gauge transformations of the coefficients in the following form (the derivation can be found in [66]):
where the are arbitrary functions. With a shorter notation, Equation (262) can be rewritten as
where the L and R cases are restored taking and , respectively. In a number of practical cases, the matrix can often be chosen to have only simple poles by the application of the Moser algorithm, whose details we do not present in this work but can be found in [138,139].
This property, along with Equation (263), allows us to find coefficients that are more convenient than the original ones, namely coefficients that show only simple poles in . We start looking for the transformation that lowers the order of a pole appearing in . We outline the procedure when a pole is located at a finite point. To fix ideas, we call q the irreducible polynomial appearing at the denominator of , raised to a certain power o. The correct transformation is given by the choice
where the coefficients have yet to be determined. With the introduction of Equation (264), Equation (263) assumes the form
Notice how the term labeled 1 in Equation (265) is the one involving the power in the denominator: these terms (which are of the type with ) can be eliminated by solving equations. The solution of this system determines for a fixed j. Considering all the j values, all the appropriate coefficients are determined by solving equations. A similar procedure exists when the pole is not located at a finite point but at infinity.
Notice that, thanks to Equation (258), it is possible to write the intersection number as
where is the set comprehensive of all the singular points of in , while is a function that locally solves
Notice how this situation closely resembles the one outlined by Equation (251) and Equation (241). Similarly to the result given by Lemma 1, the solution of Equation (267) is given by
Notice that only the first term in Equation (268) contributes to the residue in Equation (266); hence, recalling that and have at most simple poles in , it is possible to substitute
Remembering that (we write ), we can finally obtain
where by we mean the contour of small counterclockwise circles around the points.
Let us take a deeper look at Equation (270). In the univariate case, the twist is a certain with , where P and Q are certain polynomials in the only variable . Calling and the ideal generated from P, then C is the algebraic variety generated from : . If have only simple poles, then we can express the intersection number between such forms as a global residue:
The notation in Equation (271) is as follows [140]: given a certain form
in which the variables are and are n holomorphic functions in the neighborhood of the closure of the ball which have a unique isolated zero given by the point (, then the residue of at the point is defined as
In Equation (273), the contour is given by with orientation given by . The subscript in Equation (271) refers to the fact that the residue in Equation (273) does not depend strictly on the f functions in the denominator, but more in general to the ideal they generate , as we will see in more detail later in Section 7.4. Notice that Equation (271) is equivalent to Equation (251). With this new formalism, Equation (270) can be similarly rewritten as
in which the contour given by the many counterclockwise circles of Equation (270) is now deformed into a single clockwise contour (hence the minus sign) partially encircling a singular point, going towards infinity, coming back from infinity, partially encircling the next singular point, etc. until a closed path is formed. Equation (274) generalizes Equation (271) in many dimensions. Notice how in Equation (260), a generalized twist was built, with properties very similar to the ones of the usual twist . By writing its determinant , one can build the set (set of the points where does not have full rank) and , the ideal generated by P, similarly to what happened when writing the univariate Equation (271).
In conclusion, the procedure described in this section outlines an algorithm which, given as an input two cohomology classes , computes their intersection number recursively: starting from , it expands on the basis of and computes the matrix . By using transformations of the form (263), it transforms the coefficient vectors into equivalent coefficients but with only simple poles in and therefore can finally compute the residue (274). The procedure is then repeated for all i, until one has only an intersection number depending on the last variable.
7.4. Moving Onwards: An Open Problem
Recursive approaches to the computation of intersection numbers are known, but the time needed for their computation can be extremely long because of the many steps comprising the algorithm. A new question arises: is there any way to compute (238) without having to introduce some type of recursivity (whether in the number of variables or in the reduction of the order of the poles appearing in the twisted cocycles)? The fact that a recursive solution to the problem exists suggests there might be some underlying property of intersection numbers that could lead to a more fundamental method of computation. Being able to understand this could make the computation faster, but it would also imply getting a deeper understanding of the problem: in the end, it would be possible to understand what Feynman integrals represent—both in an algebraic and geometric perspective, not only by a straightforward computation problem point of view.
As a first note, we observe that in every case computation can be carried out, intersection numbers are always written in terms of a residue of the form Equation (273): we find it instructive to focus on Equation (273) and highlight some of its properties.
- 1:
- Non-degenerate case.If is non-degenerate (i.e., its Jacobian evaluated in 0 is ), then Equation (273) can be evaluated by the introduction of a change of variables . Using the usual Cauchy formula leads to
- 2:
- ideal generated from the .In this case the residue is 0. If, for example, , then is holomorphic in a bigger set, which we call .Then the contour , which is an element of , has a boundary : by the Stokes theorem, the residue of along is then 0.
While the general degenerate case is hard to compute, in [141] is suggested that if each of the appearing in depends only on a single variable , it is possible to factorize Equation (273) as
How can this be achieved? Algebraic geometry [140] shows that actually Equation (273) can be reinterpreted in terms of sheaf cohomology, which allows us to obtain an important theorem:
Theorem 8.
Transformation Theorem
Let and be holomorphic maps such that and , with being a holomorphic matrix. Then
Given n functions obeying the hypotheses of Theorem 8, then the residue in Equation (273) would take the form of Equation (276). Calling the ring over a field with n variables , we notice that the ideal generated by the , defined as implies that the ideal J generated by the polynomials is a subset of I:
This observation implies that Theorem 8 can be reinterpreted in the following way: the residue does not depend on the specific generators of the ideal I: it is possible to use the generators of an ideal that is a subset of the original one. As suggested in [141], there is a way to generate such an ideal: the exploitation of Gröbner bases, which can be regarded as a set of polynomials with special properties. In Appendix B, we give a brief introduction to the topic (for more details, see for example [142]).
Going back to the problem of the computation of the residue and following the idea from [141], we recall that the aim is to find some new that are more convenient than the original polynomials. In order to find for a fixed i, we define a Lexicographic order in which the i-th variable is the “least important variable”:
Starting from the original polynomials and constructing a Gröbner basis while keeping this order in mind, one fact is inevitable: one polynomial in the basis must depend only on the variable. In fact, the obtained Gröbner basis can be reduced with respect to itself (i.e., each polynomial in the basis can be divided with respect to the other ones): because of the chosen order, this process progressively eliminates the variables , leaving at least one polynomial depending only on the last variable . This polynomial is . Notice that, by the Buchberger’s algorithm, the many elements of the basis are constructed as a linear combination of the former polynomials: all of them are of the form requested by the Transformation Theorem hypotheses. Repeating this process for all the n possible lexicographic orders, at the end, a set is created. The computation of Gröbner bases is achieved by the software Macaulay2 [143]: here we give a brief example of how this procedure works.
Example 1.
As an example, we study the residue for .
Here we use , . The Jacobian is degenerate in ; hence we compute the residue of around .
First, we look for : in this case there is no need to start creating a Gröbner basis associated with the ordering : already depends only on . Hence, we simply consider .
We now switch to the problem of finding , using the order : it is clear that it is not possible to obtain a function depending only on by dividing each by the other remaining polynomial, so we build the Gröbner basis. Notice how this suggests that cannot form a complete Gröbner basis for the chosen order.
Dividing with respect to the set with the goal to obtain a remainder that is “smaller” in the sense of the specified order leads to
which is irreducible. We then add (or better yet, its remainder, which has already gone through the division process) to the original set: we obtain with . Without checking if this new set is a Gröbner basis or not (which it actually is), we identify .
By Theorem 8, the residue can be written as
We wonder if it is always possible to write an intersection number in terms of a residue of the kind in Equation (273), not only when simple poles are involved. Regarding the emerging importance of the global residue theorem in the computation of intersection numbers, we mention a recent work [62]. It is argued that intersection numbers between forms can be computed by an expansion in the parameter appearing in the Baikov polynomial , both for big and small : it appears that every term in the expansion can be written as a residue. We briefly focus on this result in order to give an intuitive idea of the reasons behind it without entering into too much detail.
We start by considering the manifold , where represents some hyperplanes defined by certain equations . With these functions it is possible to build the holomorphic function
which only has logarithmic singularities along the hyperplanes. Equation (284) also defines a holomorphic 1-form , which in the language introduced in Section 2 corresponds to . Similarly, it is possible to construct the operator
which corresponds to our (remember that ). We consider the space of the k-forms on M and construct two sequences:
and
Notice how both sequences are well defined, as and . The associated cohomology groups and are, respectively, defined as
and
All cohomology groups are trivial for each : only and contain useful information. We define two pairings, the first between and itself and the second between and . In the first case, taking , it is possible to define [46]
where the notation strips the forms from their part and where represents a sum of residues around each critical point given by , for .
In the second case, taking allows us to define
where represents the compact version of belonging to the same equivalence class as , similarly to the usual definitions from Cho and Matsumoto [74] (in Equation (238), we take the compact version of , but it is just a matter of convention): Equation (291) represents an intersection number. It is argued that, just as (288) looks like a limit for large of (289), the pairings in Equation (290) and Equation (291) must be linked. It is found that Equation (291) can be expanded as follows:
where each is a higher residue pairing [144] and has the form of a of certain functions that only contain , in the numerator and the derivatives both in numerator and denominator.
Notice that, as can be seen in Example 1, any residue of the kind we met can be calculated independently of the order of the poles appearing. If—as suggested by [62]—intersection numbers were always found to be expressed only in terms of residues, then a procedure involving Gröbner bases can be exploited. The biggest difference between the residue in Equation (273) and the integral in Equation (3) is the type of cohomology involved. Consider an -form of the same type as in Equation (272):
The form is holomorphic everywhere in except from the set , defined as , where each is the divisor of (namely, it is the formal sum of the points sent to 0 by applying ). This implies that its external derivative is null: , so that , where is the contour appearing in Equation (273). As the addition of a term of the type gives no contribution to Equation (273), the residue of depends on the de Rham cohomology class , where , with . On the other hand, the integral (3) similarly depends on the twisted cohomology class of . This difference is due to the presence of inside the integral: as we have seen earlier, the effect of u is the introduction of some cuts in the complex space: we wonder if, in a sense, u can be considered as part of the geometry and can be “transferred inside the sign of integral”. The integral I on the cut complex space can also be thought of as an integral on a certain Riemann surface where the cuts have been glued together. We wonder if, in this sense, it is possible to rewrite the integral (3) as multi-variable residue with a form similar to Equation (273), or at least as a sum of terms of this kind as suggested in [62]. In this case, a similar approach could be followed: while Theorem 8 emerges from the interpretation of the residue by means of sheaf cohomology—in which the cohomology of interest is the de Rham cohomology—another similar theorem for the twisted cohomology group should exist, telling us how one can adapt the function inside the integral while obtaining the same residue. As a first guess, it should not differ too much from the original theorem. Once having derived how the integrand can be modified to obtain a better integral, the focus could remain the same: having functions in the denominator that depend only on a single variable, so that the computation of the integral can finally be performed.
Of course, while we stress that these observations only outline a possible way to tackle the problem of computing an intersection number as a whole, we highlight how certainly the path has to lie in looking at Equation (238) not only with straightforward computation in mind, but with the objective of understanding a deeper structure: the path certainly lies in the abstract procedure outlined in Section 6. In this section, we introduced many of the known practical tools: some have already been exploited for the actual evaluation of intersection numbers (Section 7.1, Section 7.2 and Section 7.3), while in Section 7.4 we introduced some concepts and definitions that may become part of the practical instruments needed to pursue, in the end, the computation of the Feynman integral.
8. An Explicit Example of Feynman Integral
We want to conclude this review by showing how to explicitly apply intersection theory to the computation of Feynman integrals. The present example is due to Manoj Mandal and Federico Gasparotto. Let us consider the double box diagram for massless particles, see Figure 23:
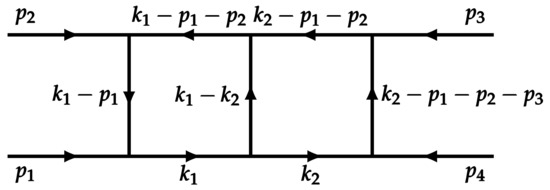
Figure 23.
Double box diagram.
After reducing to the maximal cut and choosing a basis of master integrals, we will show how to use intersection theory for determining the differential equations for the MIs as functions of a Mandelstam’s variable. Of course, momentum conservation requires , so we have independent external momenta, while , so we need
Baikov’s variables. Seven are provided by the true denominators
while the remaining two are given by the fake denominators
However, we will not work with the complete diagram but on the maximal cut, which correspond, to set , so that only the denominators and survive. Using and , we then get for the maximal cut
The twisting section is thus
with
The associated connection 1-form is
The equation has two solutions
so there are two MIs. Since we have to compute bivariate intersection numbers, we consider as internal integration variable. The number of corresponding MIs is given by the solutions of for , where . Therefore, we need just one MI for the internal integration.
As MIs we choose and , which correspond to the forms
respectively. Considering them as functions of the external parameter s, they have to satisfy the differential equation system
where the matrix is obtained as follows (see [61], Section 3.2). Let , and define the matrices and . Then,
We will then show how to compute and , being very explicit for and quoting the results for all the other components. Notice that in our specific case and
We choose .
8.1. Computation of
Let us start by computing very explicitly. According to the general construction, we need to start with the internal integration; therefore, we choose an internal basis (for only). Recalling that the dimension is 1, we choose
and for the dual. The critical point of is
Since is a -form, the reduced intersection matrix can be computed with the simple method of univariate intersection numbers for -forms. From (254), we get
To proceed iteratively, as we have seen for the recursive calculation of the multivariate intersection numbers, we have now to determine the new connection (260), which is now12
Using again (254), we get
Notice that has only simple poles and its zeros are given by (303).
Next, we need to project to :
This computation is not as direct as the previous ones, since is not of -type, and it has a double pole at infinity: for we have . However, we can use the cohomological property of the intersection numbers and shift by a -exact form to get a representative in the same class with only simple poles. For example
has two simple poles, one at and the other one at
Since cohomologous formes give equal intersection numbers, we can write
and use once again (254) to get
In a similar way, we have to project on :
Before considering the final step of the computation of , which involves the intersection between and twisted with , we notice that the last two again have a double pole at infinity. Once again, we change the cohomology representatives in order to work with forms having only simple poles. Since
we conveniently define
Similarly we set
In the same way, we can compute the remaining matrix elements of which we just quote the final results
8.2. Computation of
This is computed exactly in the same way, now choosing and . Again, we will not repeat all passages here, but limit ourselves to quoting the final results. Of course, the interested reader is invited to reproduce all the details carefully. We get
8.3. Computation of
With these elements, we can finally compute the matrix defining the differential equation for the MIs:
Of course we could proceed to work out the present example, but our scope, illustrating how to apply intersection theory to Feynman calculations, is already reached, so we leave further computation to the interested readers. Of course, exploiting all these calculations by hand is lengthy and requires a lot of time, but the major advantage of these methods is that they can be implemented on a computer making it very quickly.
9. Final Comments
The strategy we followed here is receiving growing interest at the time we are writing the present review. The ability of recognizing the correct cohomology underlying the Feynman Integrals and the corresponding intersection product would allow both to gain deeper understanding of such integrals and to systematize their computation. In particular, after determining the cohomology space, one is left with the choice of a convenient basis, i.e., the master integrals, with respect to which one can project the given amplitude, through the intersection product.
In Section 6.3, we argued the necessity of introducing the vector space of twisted cohomology with perversity, in order to correctly deal with singular forms; in Section 3 we showed different ways in which the dimension of such space can be computed and interpreted. Such interpretations mostly rely on the Poincaré duality between cycles and cocycles, which in the case of singular varieties is restored by the introduction of perverse sheaves. While in principle any set of independent forms in could serve as a basis, the determination of a preferred one suitable for practical computation is still an open problem. We remark that a natural basis of cycles is represented by the Lefschetz thimbles, as we described at the end of Section 6.4. This allows us in principle to define a basis also for the cohomology, thanks to Poincaré duality. Here our excursus ends: the practical realization of such duality has yet to be performed in a form apt to get a systematic approach in the problem of the calculation of Feynman Integrals.
Author Contributions
S.L.C., M.C. and S.T. have contributed equally to the present review. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
First of all, we are indebted to Pierpaolo Mastrolia and the group of Padua (Manoj Mandal, Federico Gasparotto, Luca Mattiazzi, Vsevolod Chestnov, Hjalte Frellesvig and Co.) for introducing us to the topic of intersection theory methods in the Feynman integrals landscape. We also thank Pierpaolo for helping us in considerably improving our manuscript and adding content to it. We also thank Maxim Kontsevich for their lesson related to Section 6.4 and Thibault Damour for helpful discussions. In particular, M.C. is grateful to Roberta Merlo for sharing her deep knowledge about spheres with handles. We are particular indebted to Manoj Mandal and Federico Gasparotto for providing us with the example of Section 8, including all the detailed calculations shown there.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Baikov Representation
For the sake of completeness, in this Appendix we provide a short derivation of the Baikov Formula (2). The idea is to rewrite the integral using the independent scalar products between momenta as integration variables. They are
where the first term is the number of scalar products between one loop and one external momentum, while the second represents the scalar products between loop momenta.
In total, one has total independent momenta. It is useful to introduce the complete vector k of all m momenta:
To perform this change in variables, we start by decomposing as
where represents the projection of onto the space generated by all the other momenta , while represents the orthogonal component with respect to said space. This is done for every variable: for each i, the corresponding is projected onto the space generated by the momenta that come next in the vector k: . In the last step, one projects the last along the space of the E external momenta . This decomposition leads to
We introduce the Gram matrix
in which the entries are . The square root of the determinant (which we will address as G instead of for brevity) of the matrix (A5) represents the volume of the parallelotope generated by the elements of k. With this interpretation, one can write
- 1:
- Parallel component .In the numerator of Equation (A6), we perform the scalar product of along the space generated by the vectors that come next (starting from ): this allows us to find the projections of along such vectors. The denominator is the necessary normalization that allows us to get the correct dimension.
- 2:
- Perpendicular component .Introducing polar coordinates and separating the angular part from the radial part, we getwhere is . Notice that can be seen as the height of a parallelotope with base , so it can be computed as the whole volume divided by the volume of its base: hence, we write
Using Equation (A6) and Equation (A8) and recalling
it is possible to obtain
where is the contour determined by . The whole Feynman integral (1) becomes
By explicit computation of the product over i in Equation (A11), only a few terms survive and Equation (A11) becomes
In the second line of Equation (A12), B is the Baikov polynomial (similar to the Jacobian associated to the change of variables) and is raised to the power , while C is an overall constant. Equation (A12) can be further simplified by noticing that in general the propagators in the denominator usually depend linearly on the scalar products between momenta; hence, one can perform a change of variables . Notice however that the number of denominators N and the the number of independent momenta scalar products M are different in general: for this reason, it is sufficient to add fake denominators , each one raised to a certain power . The original integral can be recovered by putting for . With this procedure, one readily obtains the final form (2), where the constant , and A is the Jacobian matrix between the scalar products and the propagators .
Appendix B. An Introduction on Gröbner Bases
In this Appendix, we introduce some basic tools, along with some notations and definitions, necessary to understand how to work with Gröbner bases. We start by calling the ring over a field with n variables , with being an ideal in the ring R.
Definition A1.
Combination of polynomials.
Given a set of polynomials, an expression consisting of the sum of polynomial multiples of the elements in the set is called a combination.
For example, is a combination of the polynomials .
Definition A2.
Power product.
A power product is a polynomial that can be obtained only by multiplication of the variables.
For example, is a power product.
Definition A3.
Term order.
A term order on the monomials of a ring R is an order ≺ with the following properties:
- 1:
- 2:
For example, the following order is called a Lexicographic order on the variables :
Definition A4.
Initial term (or leading power product).
Given a ring R with a term order ≺, the initial term of a polynomial (or leading power product is the largest monomial in f with respect to the given order, together with its coefficient.
For example, if and , then .
Definition A5.
Initial Ideal.
Given an ideal , is the monomial ideal generated by the initial terms .
Definition A6.
Gröbner basis.
Given an ideal with a term order ≺ and a set of polynomials , if is generated by then G is called a Gröbner basis with respect to the order.
Definition A6 implies that, given a with , must be divisible by at least one of the in the basis.
We also introduce some concepts that will be useful in our context. First, we introduce the algorithm of division of a polynomial by a given set of polynomials. This concept arises from the following question: given an ideal , when is an also ? Suppose we have a Gröbner basis for I: if , then its leading power product must be divisible by one of the leading power products appearing in the basis (the one belonging to a certain polynomial to fix ideas). The subtraction of an appropriate multiple of from h leads to a new , where the old leading term has been canceled. If , then also : the process can be reiterated until 0 is obtained (hence is verified). If the iterated process leads to a polynomial that cannot be further reduced, then . The result of this procedure of division of a polynomial f by a set of polynomials G is called the remainder. Notice that this procedure must be finite, as the definition of a term order ≺ implies a descending path in the variables that has to end (this is not true for a generic set of polynomials that is not a Gröbner basis for I, as one should check infinite types of combinations of polynomials in principle).
Notice that the concept of remainder can be used to determine if two polynomials in R are equal modulo I (i.e., if combination of generators of : in general, one should check infinite combinations of the generators, but with a Gröbner basis for I:
- G is a Gröbner basis for ;
- If G is a Gröbner basis for I, then are equal modulo .
With these tools, it is possible to construct a practical way that tells us how to build Gröbner bases.
Definition A7.
S-polynomial.
Given two polynomials , the S-polynomial between f and g is defined as:
where the notation means deprived of its coefficient.
Notice that the S-polynomial of two polynomials is a combination of f and g: because of the previous observations, if a set is Gröbner basis, then . This requirement is the fundamental of Buchberger’s Algorithm [145], which, starting from a certain set of polynomials that generate an ideal I, returns a Gröbner basis for the same ideal, at a certain given order. The algorithm works as follows: given , it computes ; if , and then it proceeds to the next couple of elements ( and , for instance). If , F is not a Gröbner basis, it then adds - or better yet, its remainder , as a new element of F, and starts again. Notice that the addition of the new term to F ensures that in the next iteration . At the end of the process, F forms a Gröbner basis.
Notes
| 1 | Here one has to be careful: if we take a sphere with a hole, its boundary is not a boundary of the hole, but it is for its complement. In the above example this is not so. |
| 2 | If we cut before passing the saddle point, we get two cylinders, which correspond to trivial pieces. |
| 3 | runs along twice, so a further factor appears. |
| 4 | are non homogeneous coordinates on that can be related to homogeneous ones by , on the patch . |
| 5 | For example, assume , and take the transformation
Finally, fixing such that , we get the Weierstrass normal form. |
| 6 | Notice that this cannot be the general case, or at least not assuming b and d remain orthogonal to the equipotential lines. |
| 7 | In addition, they do not change deforming the path and continuously. |
| 8 | If we considered the invariants, the result at the point would be that the points meet with total coefficient . |
| 9 | Therefore, is defined by any given simplicial decomposition of N. |
| 10 | Indeed because of dimensional regularization. |
| 11 | Notice also that the massless condition and momentum conservation imply . |
| 12 | Notice that we are not using an orthonormal frame, so the inverse matrix appears. |
| 13 | Notice that we have changed the connection to . |
| 14 | once again taking into account of the non othonormality through . |
References
- Veltman, M.J.G. Diagrammatica: The Path to Feynman Rules; Cambridge University Press: Cambridge, UK, 2012; Volume 4. [Google Scholar]
- ’t Hooft, G.; Veltman, M.J.G. DIAGRAMMAR. NATO Sci. Ser. B 1974, 4, 177–322. [Google Scholar] [CrossRef]
- Bern, Z.; Dixon, L.J.; Dunbar, D.C.; Kosower, D.A. Fusing gauge theory tree amplitudes into loop amplitudes. Nucl. Phys. 1995, B435, 59–101. [Google Scholar] [CrossRef]
- Bern, Z.; Dixon, L.J.; Dunbar, D.C.; Kosower, D.A. One loop n point gauge theory amplitudes, unitarity and collinear limits. Nucl. Phys. 1994, B425, 217–260. [Google Scholar] [CrossRef]
- Britto, R.; Cachazo, F.; Feng, B. Generalized unitarity and one-loop amplitudes in N=4 super-Yang-Mills. Nucl. Phys. B 2005, 725, 275–305. [Google Scholar] [CrossRef]
- Britto, R.; Buchbinder, E.; Cachazo, F.; Feng, B. One-loop amplitudes of gluons in SQCD. Phys. Rev. D 2005, 72, 065012. [Google Scholar] [CrossRef]
- Cachazo, F.; He, S.; Yuan, E.Y. Scattering equations and Kawai-Lewellen-Tye orthogonality. Phys. Rev. 2014, D90, 065001. [Google Scholar] [CrossRef]
- Bern, Z.; Carrasco, J.J.; Chiodaroli, M.; Johansson, H.; Roiban, R. The Duality Between Color and Kinematics and its Applications. arXiv 2019, arXiv:1909.01358. [Google Scholar]
- Ossola, G.; Papadopoulos, C.G.; Pittau, R. Reducing full one-loop amplitudes to scalar integrals at the integrand level. Nucl. Phys. B 2007, 763, 147–169. [Google Scholar] [CrossRef]
- Ellis, R.; Giele, W.; Kunszt, Z. A Numerical Unitarity Formalism for Evaluating One-Loop Amplitudes. J. High Energy Phys. 2008, 03, 003. [Google Scholar] [CrossRef]
- Ellis, R.; Giele, W.T.; Kunszt, Z.; Melnikov, K. Masses, fermions and generalized D-dimensional unitarity. Nucl. Phys. B 2009, 822, 270–282. [Google Scholar] [CrossRef]
- Mastrolia, P.; Mirabella, E.; Peraro, T. Integrand reduction of one-loop scattering amplitudes through Laurent series expansion. J. High Energy Phys. 2012, 06, 095, Erratum in 2012, 11, 128. [Google Scholar] [CrossRef]
- Zhang, Y. Integrand-Level Reduction of Loop Amplitudes by Computational Algebraic Geometry Methods. J. High Energy Phys. 2012, 09, 042. [Google Scholar] [CrossRef]
- Mastrolia, P.; Mirabella, E.; Ossola, G.; Peraro, T. Scattering Amplitudes from Multivariate Polynomial Division. Phys. Lett. B 2012, 718, 173–177. [Google Scholar] [CrossRef]
- Mastrolia, P.; Ossola, G. On the Integrand-Reduction Method for Two-Loop Scattering Amplitudes. J. High Energy Phys. 2011, 11, 014. [Google Scholar] [CrossRef]
- Badger, S.; Frellesvig, H.; Zhang, Y. A Two-Loop Five-Gluon Helicity Amplitude in QCD. J. High Energy Phys. 2013, 12, 045. [Google Scholar] [CrossRef]
- Chetyrkin, K.G.; Tkachov, F.V. Integration by Parts: The Algorithm to Calculate beta Functions in 4 Loops. Nucl. Phys. 1981, B192, 159–204. [Google Scholar] [CrossRef]
- Laporta, S.; Remiddi, E. The Analytical value of the electron (g-2) at order alpha**3 in QED. Phys. Lett. 1996, B379, 283–291. [Google Scholar] [CrossRef]
- Barucchi, G.; Ponzano, G. Differential equations for one-loop generalized feynman integrals. J. Math. Phys. 1973, 14, 396–401. [Google Scholar] [CrossRef]
- Kotikov, A. Differential equations method. New technique for massive Feynman diagram calculation. Phys. Lett. B 1991, 254, 158–164. [Google Scholar] [CrossRef]
- Bern, Z.; Dixon, L.J.; Kosower, D.A. Dimensionally regulated pentagon integrals. Nucl. Phys. 1994, B412, 751–816. [Google Scholar] [CrossRef]
- Remiddi, E. Differential equations for Feynman graph amplitudes. Nuovo Cim. 1997, A110, 1435–1452. [Google Scholar]
- Gehrmann, T.; Remiddi, E. Differential equations for two loop four point functions. Nucl. Phys. 2000, B580, 485–518. [Google Scholar] [CrossRef]
- Henn, J.M. Multiloop integrals in dimensional regularization made simple. Phys. Rev. Lett. 2013, 110, 251601. [Google Scholar] [CrossRef]
- Argeri, M.; Di Vita, S.; Mastrolia, P.; Mirabella, E.; Schlenk, J.; Schubert, U.; Tancredi, L. Magnus and Dyson Series for Master Integrals. J. High Energy Phys. 2014, 03, 082. [Google Scholar] [CrossRef]
- Adams, L.; Chaubey, E.; Weinzierl, S. Simplifying Differential Equations for Multiscale Feynman Integrals beyond Multiple Polylogarithms. Phys. Rev. Lett. 2017, 118, 141602. [Google Scholar] [CrossRef]
- Laporta, S. High precision calculation of multiloop Feynman integrals by difference equations. Int. J. Mod. Phys. 2000, A15, 5087–5159. [Google Scholar] [CrossRef]
- Laporta, S. Calculation of Feynman integrals by difference equations. Acta Phys. Polon. 2003, B34, 5323–5334. [Google Scholar]
- Tarasov, O.V. Connection between Feynman integrals having different values of the space-time dimension. Phys. Rev. 1996, D54, 6479–6490. [Google Scholar] [CrossRef]
- Lee, R.N. Space-time dimensionality D as complex variable: Calculating loop integrals using dimensional recurrence relation and analytical properties with respect to D. Nucl. Phys. 2010, B830, 474–492. [Google Scholar] [CrossRef]
- Argeri, M.; Mastrolia, P. Feynman Diagrams and Differential Equations. Int. J. Mod. Phys. A 2007, 22, 4375–4436. [Google Scholar] [CrossRef]
- Henn, J.M. Lectures on differential equations for Feynman integrals. J. Phys. 2015, A48, 153001. [Google Scholar] [CrossRef]
- Kalmykov, M.; Bytev, V.; Kniehl, B.A.; Moch, S.O.; Ward, B.F.L.; Yost, S.A. Hypergeometric Functions and Feynman Diagrams. arXiv 2020, arXiv:2012.14492. [Google Scholar]
- Chen, K.T. Iterated path integrals. Bull. Am. Math. Soc. 1977, 83, 831–879. [Google Scholar] [CrossRef]
- Goncharov, A.B. Multiple polylogarithms, cyclotomy and modular complexes. Math. Res. Lett. 1998, 5, 497–516. [Google Scholar] [CrossRef]
- Remiddi, E.; Vermaseren, J.A.M. Harmonic polylogarithms. Int. J. Mod. Phys. 2000, A15, 725–754. [Google Scholar] [CrossRef]
- Broadhurst, D.J.; Kreimer, D. Association of multiple zeta values with positive knots via Feynman diagrams up to 9 loops. Phys. Lett. B 1997, 393, 403–412. [Google Scholar] [CrossRef]
- Broadhurst, D.J.; Kreimer, D. Towards cohomology of renormalization: Bigrading the combinatorial Hopf algebra of rooted trees. Commun. Math. Phys. 2000, 215, 217–236. [Google Scholar] [CrossRef][Green Version]
- Bloch, S.; Esnault, H.; Kreimer, D. On Motives associated to graph polynomials. Commun. Math. Phys. 2006, 267, 181–225. [Google Scholar] [CrossRef]
- Bogner, C.; Weinzierl, S. Periods and Feynman integrals. J. Math. Phys. 2009, 50, 042302. [Google Scholar] [CrossRef]
- Brown, F.C.S. On the periods of some Feynman integrals. arXiv 2009, arXiv:0910.0114. [Google Scholar]
- Marcolli, M. Feynman integrals and motives. arXiv 2009, arXiv:0907.0321. [Google Scholar]
- Arkani-Hamed, N.; Bourjaily, J.L.; Cachazo, F.; Goncharov, A.B.; Postnikov, A.; Trnka, J. Grassmannian Geometry of Scattering Amplitudes; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar] [CrossRef]
- Arkani-Hamed, N.; Bai, Y.; Lam, T. Positive Geometries and Canonical Forms. J. High Energy Phys. 2017, 11, 039. [Google Scholar] [CrossRef]
- Mizera, S. Combinatorics and Topology of Kawai-Lewellen-Tye Relations. J. High Energy Phys. 2017, 08, 097. [Google Scholar] [CrossRef]
- Mizera, S. Scattering Amplitudes from Intersection Theory. Phys. Rev. Lett. 2018, 120, 141602. [Google Scholar] [CrossRef]
- Broedel, J.; Duhr, C.; Dulat, F.; Penante, B.; Tancredi, L. Elliptic Feynman integrals and pure functions. J. High Energy Phys. 2019, 01, 023. [Google Scholar] [CrossRef]
- Henn, J.; Mistlberger, B.; Smirnov, V.A.; Wasser, P. Constructing d-log integrands and computing master integrals for three-loop four-particle scattering. J. High Energy Phys. 2020, 04, 167. [Google Scholar] [CrossRef]
- Sturmfels, B.; Telen, S. Likelihood Equations and Scattering Amplitudes. arXiv 2020, arXiv:2012.05041. [Google Scholar]
- Hwa, R.; Teplitz, V. Homology and Feynman Integrals; Mathematical Physics Monograph Series; W. A. Benjamin: New York, NY, USA, 1966. [Google Scholar]
- Pham, F. Introduction to the topological study of landau singularities 1965. In Singularities of Integrals. Homology, Hyperfunctions and Microlocal Analysis; Report number: PRINT-65-1015; Springer: London, UK, 2011. [Google Scholar]
- Lefschetz, S. Applications of Algebraic Topology. Graphs and Networks. The Picard-Lefschetz Theory and Feynman Integrals; Springer: New York, NY, USA, 1975. [Google Scholar]
- Lee, R.N.; Pomeransky, A.A. Critical points and number of master integrals. J. High Energy Phys. 2013, 11, 165. [Google Scholar] [CrossRef]
- Broadhurst, D.; Mellit, A. Perturbative quantum field theory informs algebraic geometry. PoS 2016, LL2016, 079. [Google Scholar] [CrossRef]
- Broadhurst, D. Feynman integrals, L-series and Kloosterman moments. Commun. Num. Theor. Phys. 2016, 10, 527–569. [Google Scholar] [CrossRef]
- Broadhurst, D.; Roberts, D.P. Quadratic relations between Feynman integrals. PoS 2018, LL2018, 053. [Google Scholar] [CrossRef]
- Abreu, S.; Britto, R.; Duhr, C.; Gardi, E.; Matthew, J. From positive geometries to a coaction on hypergeometric functions. J. High Energy Phys. 2020, 02, 122. [Google Scholar] [CrossRef]
- Abreu, S.; Britto, R.; Duhr, C.; Gardi, E.; Matthew, J. Generalized hypergeometric functions and intersection theory for Feynman integrals. arXiv 2019, arXiv:1912.03205. [Google Scholar]
- Mastrolia, P.; Mizera, S. Feynman Integrals and Intersection Theory. J. High Energy Phys. 2019, 02, 139. [Google Scholar] [CrossRef]
- Mizera, S. Aspects of Scattering Amplitudes and Moduli Space Localization. arXiv 2019, arXiv:1906.02099. [Google Scholar]
- Frellesvig, H.; Gasparotto, F.; Laporta, S.; Mandal, M.K.; Mastrolia, P.; Mattiazzi, L.; Mizera, S. Decomposition of Feynman Integrals on the Maximal Cut by Intersection Numbers. J. High Energy Phys. 2019, 05, 153. [Google Scholar] [CrossRef]
- Mizera, S.; Pokraka, A. From Infinity to Four Dimensions: Higher Residue Pairings and Feynman Integrals. arXiv 2019, arXiv:1910.11852. [Google Scholar] [CrossRef]
- Frellesvig, H.; Gasparotto, F.; Mandal, M.K.; Mastrolia, P.; Mattiazzi, L.; Mizera, S. Vector Space of Feynman Integrals and Multivariate Intersection Numbers. Phys. Rev. Lett. 2019, 123, 201602. [Google Scholar] [CrossRef] [PubMed]
- Mizera, S. Status of Intersection Theory and Feynman Integrals. arXiv 2020, arXiv:2002.10476. [Google Scholar]
- Frellesvig, H.; Gasparotto, F.; Laporta, S.; Mandal, M.K.; Mastrolia, P.; Mattiazzi, L.; Mizera, S. Decomposition of Feynman Integrals by Multivariate Intersection Numbers. arXiv 2020, arXiv:2008.04823. [Google Scholar]
- Weinzierl, S. On the computation of intersection numbers for twisted cocycles. arXiv 2020, arXiv:2002.01930. [Google Scholar]
- Kaderli, A. A note on the Drinfeld associator for genus-zero superstring amplitudes in twisted de Rham theory. arXiv 2019, arXiv:1912.09406. [Google Scholar]
- Kalyanapuram, N.; Jha, R.G. Positive Geometries for all Scalar Theories from Twisted Intersection Theory. Phys. Rev. Res. 2020, 2, 033119. [Google Scholar] [CrossRef]
- Weinzierl, S. Correlation functions on the lattice and twisted cocycles. Phys. Lett. B 2020, 805, 135449. [Google Scholar] [CrossRef]
- Fresán, J.; Sabbah, C.; Yu, J.D. Quadratic relations between periods of connections. arXiv 2020, arXiv:2005.11525. [Google Scholar]
- Fresán, J.; Sabbah, C.; Yu, J.D. Quadratic relations between Bessel moments. arXiv 2020, arXiv:2006.02702. [Google Scholar]
- Chen, J.; Xu, X.; Yang, L.L. Constructing Canonical Feynman Integrals with Intersection Theory. arXiv 2020, arXiv:2008.03045. [Google Scholar]
- Britto, R.; Mizera, S.; Rodriguez, C.; Schlotterer, O. Coaction and double-copy properties of configuration-space integrals at genus zero. arXiv 2021, arXiv:2102.06206. [Google Scholar]
- Cho, K.; Matsumoto, K. Intersection theory for twisted cohomologies and twisted Riemann’s period relations I. Nagoya Math. J. 1995, 139, 67–86. [Google Scholar] [CrossRef]
- Matsumoto, K. Quadratic Identities for Hypergeometric Series of Type (k,l). Kyushu J. Math. 1994, 48, 335–345. [Google Scholar] [CrossRef]
- Matsumoto, K. Intersection numbers for logarithmic k-forms. Osaka J. Math. 1998, 35, 873–893. [Google Scholar]
- Ohara, K.; Sugiki, Y.; Takayama, N. Quadratic Relations for Generalized Hypergeometric Functions pFp−1. Funkc. Ekvacioj 2003, 46, 213–251. [Google Scholar] [CrossRef]
- Goto, Y. Twisted Cycles and Twisted Period Relations for Lauricella’s Hypergeometric Function FC. Int. J. Math. 2013, 24, 1350094. [Google Scholar] [CrossRef]
- Goto, Y.; Matsumoto, K. The monodromy representation and twisted period relations for Appell’s hypergeometric function F4. Nagoya Math. J. 2015, 217, 61–94. [Google Scholar] [CrossRef]
- Goto, Y. Twisted period relations for Lauricella’s hypergeometric functions FA. Osaka J. Math. 2015, 52, 861–879. [Google Scholar]
- Goto, Y. Intersection Numbers and Twisted Period Relations for the Generalized Hypergeometric Function m+1Fm. Kyushu J. Math. 2015, 69, 203–217. [Google Scholar] [CrossRef]
- Matsubara-Heo, S.J.; Takayama, N. An algorithm of computing cohomology intersection number of hypergeometric integrals. arXiv 2019, arXiv:1904.01253. [Google Scholar]
- Smirnov, A.V.; Petukhov, A.V. The Number of Master Integrals is Finite. Lett. Math. Phys. 2011, 97, 37–44. [Google Scholar] [CrossRef]
- Aluffi, P.; Marcolli, M. Feynman motives and deletion-contraction relations. arXiv 2009, arXiv:0907.3225. [Google Scholar]
- Aluffi, P. Generalized euler characteristics, graph hypersurfaces, and feynman periods. In Geometric, Algebraic and Topological Methods for Quantum Field Theory; World Scientific: Singapore, 2014; pp. 95–136. [Google Scholar] [CrossRef]
- Bitoun, T.; Bogner, C.; Klausen, R.P.; Panzer, E. Feynman integral relations from parametric annihilators. Lett. Math. Phys. 2019, 109, 497–564. [Google Scholar] [CrossRef]
- Bitoun, T.; Bogner, C.; Klausen, R.P.; Panzer, E. The number of master integrals as Euler characteristic. PoS 2018, LL2018, 065. [Google Scholar] [CrossRef]
- Zhou, Y. Wick rotations, Eichler integrals, and multi-loop Feynman diagrams. Commun. Num. Theor. Phys. 2018, 12, 127–192. [Google Scholar] [CrossRef]
- Zhou, Y. Wrońskian factorizations and Broadhurst–Mellit determinant formulae. Commun. Num. Theor. Phys. 2018, 12, 355–407. [Google Scholar] [CrossRef]
- Lee, R.N. Symmetric ϵ- and (ϵ+1/2)-forms and quadratic constraints in ”elliptic” sectors. J. High Energy Phys. 2018, 10, 176. [Google Scholar] [CrossRef]
- Baikov, P.A. Explicit solutions of the multiloop integral recurrence relations and its application. Nucl. Instrum. Meth. 1997, A389, 347–349. [Google Scholar] [CrossRef]
- Grozin, A.G. Integration by parts: An Introduction. Int. J. Mod. Phys. 2011, A26, 2807–2854. [Google Scholar] [CrossRef]
- Bogner, C.; Weinzierl, S. Feynman graph polynomials. Int. J. Mod. Phys. A 2010, 25, 2585–2618. [Google Scholar] [CrossRef]
- Mastrolia, P.; Peraro, T.; Primo, A. Adaptive Integrand Decomposition in parallel and orthogonal space. J. High Energy Phys. 2016, 08, 164. [Google Scholar] [CrossRef]
- Lee, R.N.; Smirnov, V.A. The Dimensional Recurrence and Analyticity Method for Multicomponent Master Integrals: Using Unitarity Cuts to Construct Homogeneous Solutions. J. High Energy Phys. 2012, 12, 104. [Google Scholar] [CrossRef]
- Harley, M.; Moriello, F.; Schabinger, R.M. Baikov-Lee Representations Of Cut Feynman Integrals. J. High Energy Phys. 2017, 06, 049. [Google Scholar] [CrossRef]
- Matsubara-Heo, S.J. Euler and Laplace integral representations of GKZ hypergeometric functions. arXiv 2019, arXiv:1904.00565. [Google Scholar]
- Goto, Y.; Matsubara-Heo, S.J. Homology and cohomology intersection numbers of GKZ systems. arXiv 2020, arXiv:2006.07848. [Google Scholar]
- Acres, K.; Broadhurst, D. Empirical determinations of Feynman integrals using integer relation algorithms. arXiv 2021, arXiv:2103.06345. [Google Scholar]
- Hilton, P.; Pedersen, J. Descartes, Euler, Poincaré, Pólya and Polyhedra. Séminaire de Philosophie et Mathématiques 1982, 8, 1–17. [Google Scholar]
- Milnor, J. Morse Theory; AM-51; Number v. 51 in Annals of Mathematics Studies; Princeton University Press: Princeton, NJ, USA, 2016. [Google Scholar]
- Dubrovin, B.A.; Fomenko, A.; Novikov, S. Modern Geometry–methods and Applications: Part 3: Introduction to Homology Theory; Springer: New York, NY, USA, 1984. [Google Scholar]
- Madsen, I.H.; Tornehaven, J. From Calculus to Cohomology: De Rham Cohomology and Characteristic Classes; Cambridge University Press: Cambridge, UK; New York, NY, USA, 1997. [Google Scholar]
- Lefschetz, S. L’analysis Situs et la GéOméTrie Algébrique, par S. Lefschetz.; Collection de Monographies sur la Théorie des Fonctions pub. sous la Direction de m. Émile Borel; Gauthier-Villars et cie: Paris, France, 1924. [Google Scholar]
- Hodge, W.V.D. The Theory and Applications of Harmonic Integrals; Cambridge University Press: Cambridge, UK; New York, NY, USA, 1989. [Google Scholar]
- Hodge, W.; Atiyah, M. Integrals of the Second Kind on an Algebraic Variety. Ann. Math. 1955, 62, 56. [Google Scholar] [CrossRef]
- Grothendieck, A. Standard conjectures on algebraic cycles. In Algebraic Geometry (Internat. Colloq., Tata Inst. Fund. Res., Bombay, 1968); Oxford University Press: London, UK, 1969; pp. 193–199. [Google Scholar]
- Whitney, H. Geometric Integration Theory; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Hancock, H. Elliptic Integrals; Dover Publications Inc.: New York, NY, USA, 1958; p. 104. [Google Scholar]
- Shafarevich, I.R. Basic Algebraic Geometry, 3rd ed.; Springer: Berlin, Germany, 2013. [Google Scholar] [CrossRef]
- Chandrasekharan, K. Elliptic Functions; Springer: Berlin/Heidelberg, Germany, 1985. [Google Scholar]
- Pham, F. Vanishing homologies and the n variable saddlepoint method. In Singularities, Part 2 (Arcata, Calif., 1981); American Mathematical Society: Providence, RI, USA, 1983; Volume 40, pp. 319–333. [Google Scholar]
- Pham, F. La descente des cols par les onglets de Lefschetz, avec vues sur Gauss- Manin. Astérisque 1985, 130, 11–47. [Google Scholar]
- Bredon, G. Topology and Geometry; Springer: New York, NY, USA, 1993. [Google Scholar]
- de Rham, G. Sur l’analysis situs des variétés à n dimensions. J. MathéMatiques Pures AppliquéEs 1931, 10, 115–200. [Google Scholar]
- Weil, A. Sur les théorèmes de de Rham. Comment. Math. Helv. 1952, 26, 119–145. [Google Scholar] [CrossRef]
- Schwartz, J. De Rham’s Theorem for Arbitrary Spaces. Am. J. Math. 1955, 77, 29–44. [Google Scholar] [CrossRef]
- Samelson, H. On the De Rham’s Theorem. Topology 1967, 6, 427–432. [Google Scholar] [CrossRef]
- Christian-Oliver, E. A de Rham isomorphism in singular cohomology and Stokes theorem for stratifolds. Int. J. Geom. Methods Mod. Phys. 2004, 2, 63–81. [Google Scholar] [CrossRef]
- Hutchings, M. Cup Product and Intersections. 2011. Available online: https://math.berkeley.edu/~hutching/teach/215b-2011/cup.pdf (accessed on 26 December 2020).
- Maxim, L.G. Intersection Homology & Perverse Sheaves; Springer: Cham, Switzerland, 2019. [Google Scholar]
- de Cataldo, M.A.; Migliorini, L. The Decomposition Theorem, perverse sheaves and the topology of algebraic maps. Bull. Am. Math. Soc. 2009, 46, 535–633. [Google Scholar] [CrossRef]
- Deligne, P. Théorie de Hodge: I. Actes Congrès Int. Math. 1970, 1, 425–430. [Google Scholar]
- Deligne, P. Théorie de Hodge: II. Publications Mathématiques de l’IHÉS 1971, 40, 5–57. [Google Scholar] [CrossRef]
- Deligne, P. Théorie de Hodge: III. Publications Mathématiques de l’IHÉS 1974, 44, 5–77. [Google Scholar] [CrossRef]
- McCrory, C. Cone Complexes and PL Transversality. Trans. Am. Math. Soc. 1975, 207, 269–291. [Google Scholar] [CrossRef]
- Goresky, M.; MacPherson, R. Intersection Homology Theory. Topology 1980, 19, 135–162. [Google Scholar] [CrossRef]
- Goresky, M.; MacPherson, R. Intersection Homology Theory, II. Invent. Math. 1983, 72, 77–129. [Google Scholar] [CrossRef]
- Goresky, M.; MacPherson, R. La dualité de Poincaré pour les espaces singuliers. C. R. Acad. Sci. Paris 1977, 284, 1549–1551. [Google Scholar]
- Goresky, M.; MacPherson, R. Simplicial Intersection Homology. Inv. Math. 1986, 84, 432–433. [Google Scholar]
- Goresky, M.; MacPherson, R. Lefschetz fixed point theorem for intersection homology. Comment. Math. Helv. 1985, 60, 366–391. [Google Scholar] [CrossRef]
- Goresky, M.; MacPherson, R. On the topology of complex algebraic maps. In Proceedings of the Conference on Algebraic Geometry, La Rabida, Spain, 7–15 January 1981; Springer Lecture Notes in Mathematics. Volume 961, pp. 119–129. [Google Scholar]
- Goresky, M.; MacPherson, R. Stratified Morse Theory; Springer: Berlin, Germany; New York, NY, USA, 1988; Volume 14. [Google Scholar]
- Goresky, M.; MacPherson, R. Stratified Morse Theory. Proc. Symp. Pure Math. 1983, 40, 517–533. [Google Scholar]
- Goresky, M.; MacPherson, R. Morse theory and intersection homology theory, dans Analyse et topologie sur les espaces singuliers (II-III)-6-10 juillet 1981. Astérisque 1983, 58, 101–102. [Google Scholar]
- Williamson, G. An Illustrated Guide to Perverse Sheaves, Course Given in Pisa 19th–30th of January. 2015. Available online: https://www.maths.usyd.edu.au/u/geordie/perverse_course/lectures.pdf (accessed on 20 October 2020).
- Aomoto, K.; Kita, M. Theory of Hypergeometric Functions; Springer Monographs in Mathematics; Springer: Tokyo, Japan, 2011. [Google Scholar] [CrossRef]
- Moser, J. The Order of a Singularity in Fuchs’ Theory. Math. Z. 1959, 72, 379–398. [Google Scholar] [CrossRef]
- Lee, R.N. Reducing differential equations for multiloop master integrals. J. High Energy Phys. 2015, 4, 108. [Google Scholar] [CrossRef]
- Griffiths, P.; Harris, J. Principles of Algebraic Geometry; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Søgaard, M.; Zhang, Y. Multivariate Residues and Maximal Unitarity. J. High Energy Phys. 2013, 12, 008. [Google Scholar] [CrossRef]
- Adams, W.; Loustaunau, P. An Introduction to Gröbner Bases (Graduate Studies in Mathematics); American Mathematical Society: Providence, RI, USA, 1994; Volume 3. [Google Scholar]
- Grayson, D.R.; Stillman, M.E. Macaulay2, a Software System for Research in Algebraic Geometry. Available online: https://faculty.math.illinois.edu/Macaulay2/ (accessed on 18 May 2021).
- Saito, K. The higher residue pairings K F (k) for a family of hypersurface singular points. In Proceedings of the Symposia in Pure Mathematics; American Mathematical Society: Providence, Rhode Island, 1983; Volume 40. [Google Scholar] [CrossRef]
- Buchberger, B. Ein Algorithmus zum Auffinden der Basiselemente des Restklassenringes nach einem Nulldimensionalen Polynomideal. Master’s Thesis, University of Innsbruck, Innsbruck, Austria, 1965. [Google Scholar]























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).