
Testing General Relativity with the Radio Science Experiment of the BepiColombo mission to Mercury



Abstract
:1. Introduction
- (a)
- spacecraft state vector (position and velocity) at given times (Mercurycentric orbit determination);
- (b)
- (c)
- parameters defining the model of the Mercury’s rotation (rotation experiment);
- (d)
- (e)
- state vector of Mercury and Earth-Moon Barycenter (EMB) orbits at some reference epoch, in order to improve the ephemerides (Mercury and EMB orbit determination);
- (f)
- post-Newtonian (PN) parameters [12,13,21,22], together with some related parameters, like the solar oblateness factor , the solar gravitational factor , where G is the gravitational constant and the Sun’s mass, and its time variation, , in order to test gravitational theories (relativity experiment).
2. The ORBIT14 Software
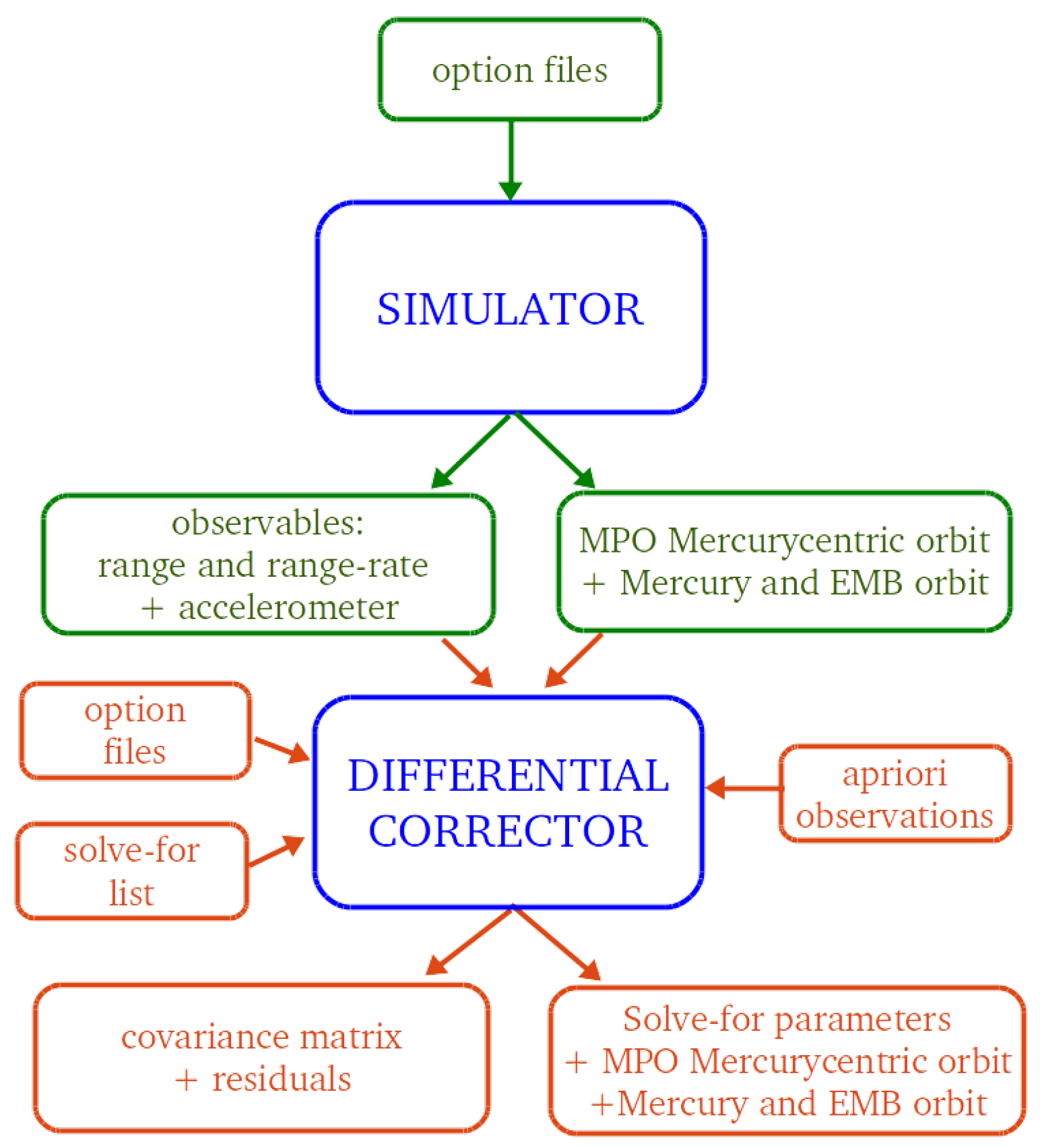
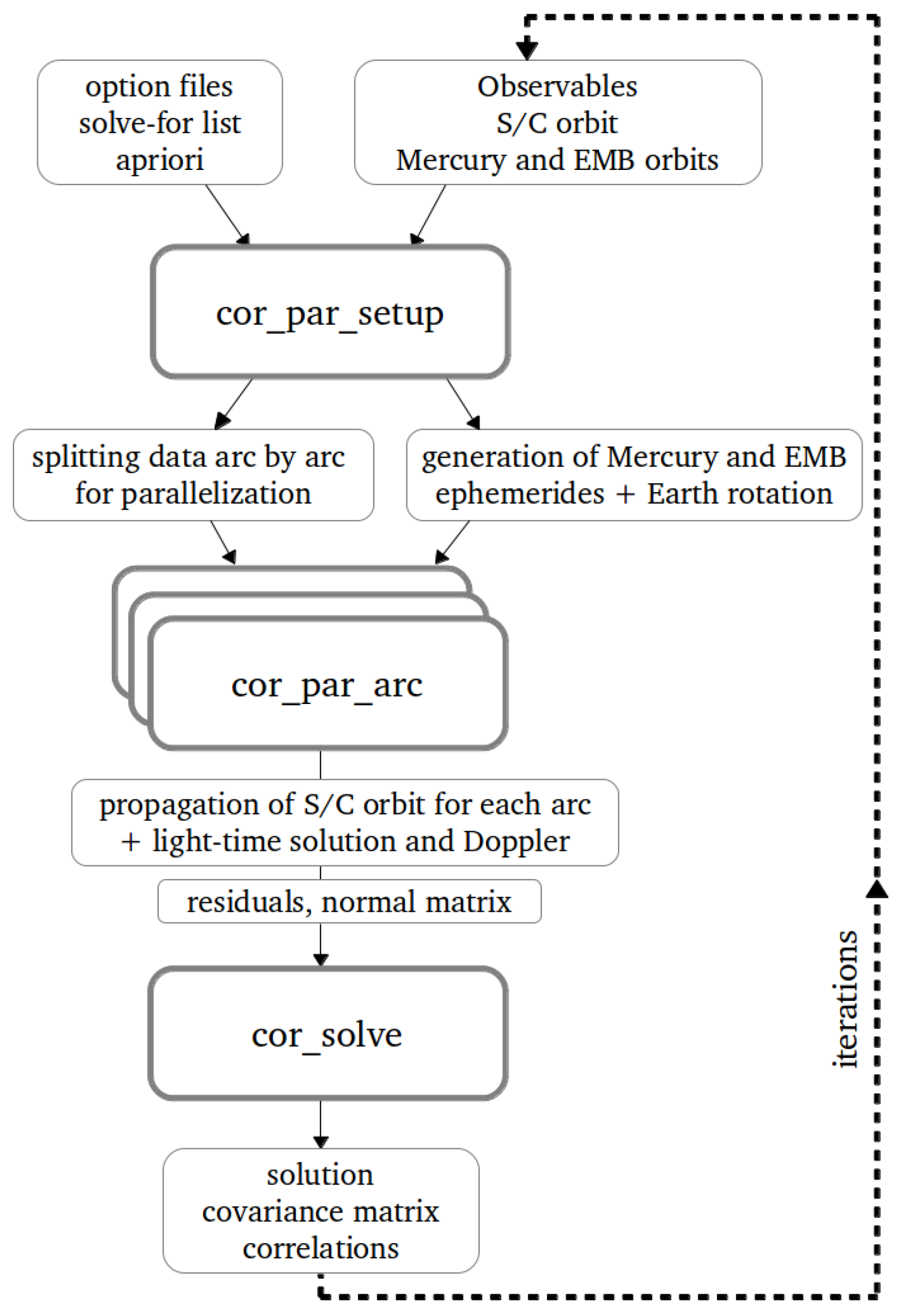
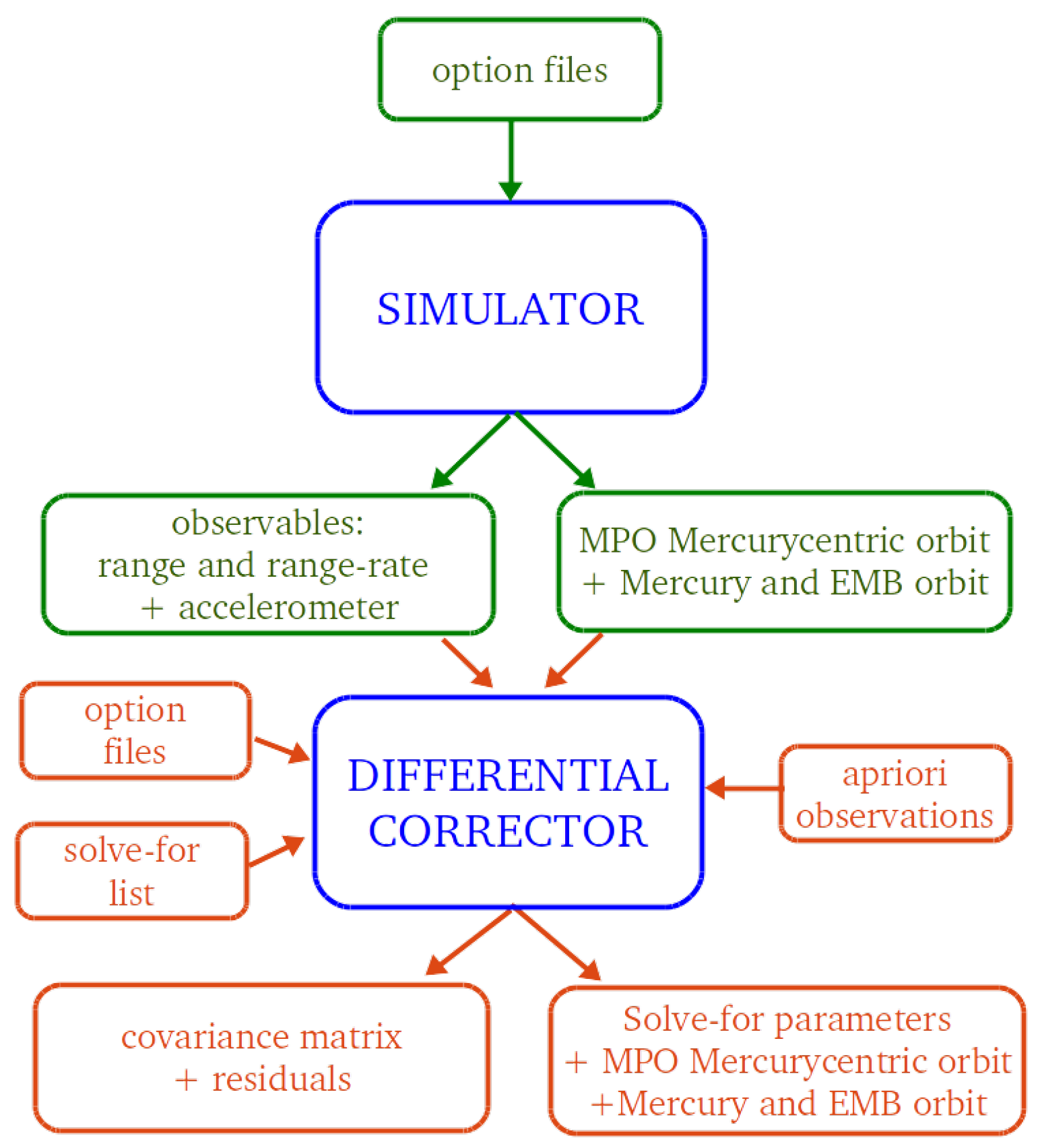
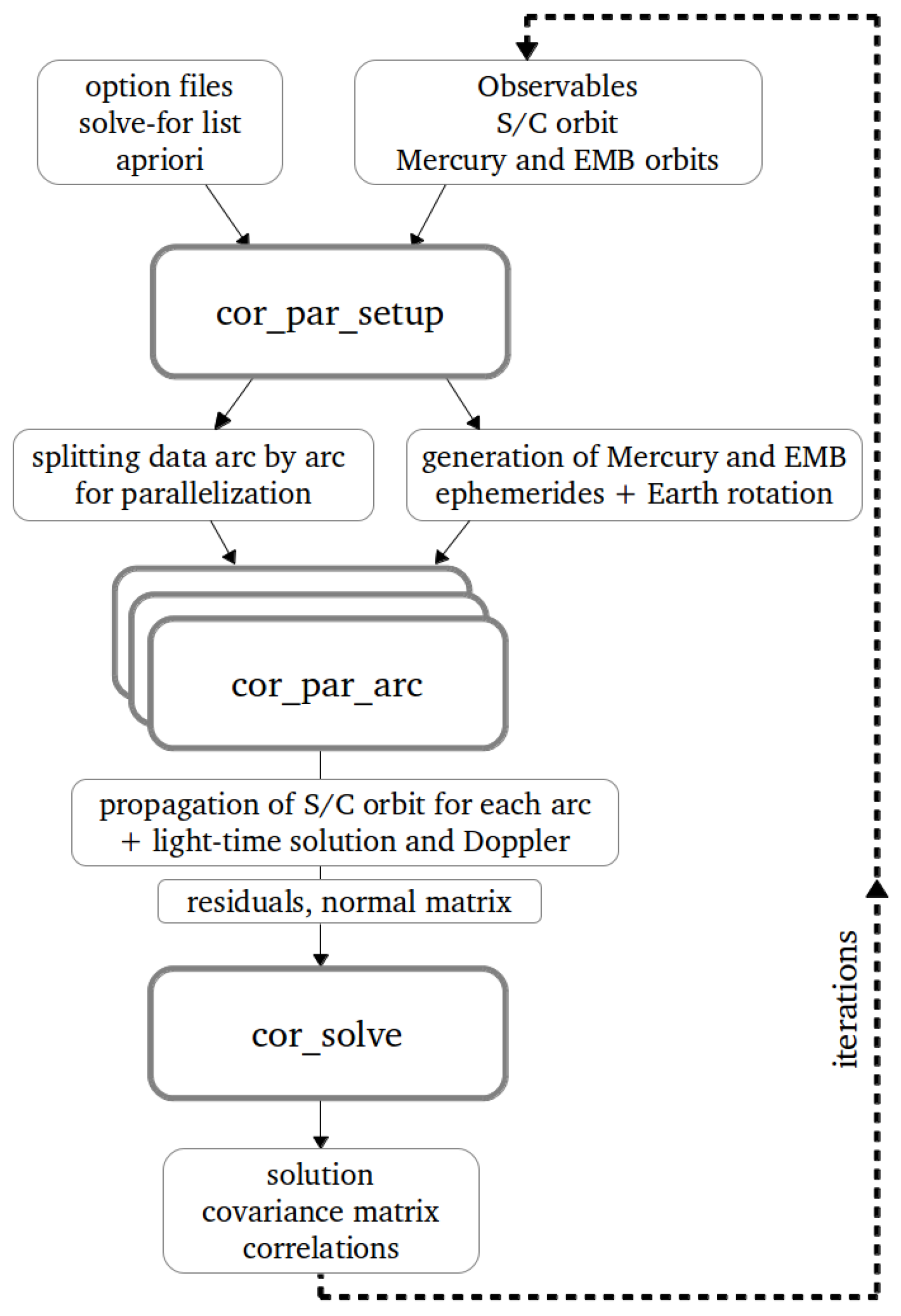
2.1. Global Structure
2.2. Non-Linear Least Squares Fit
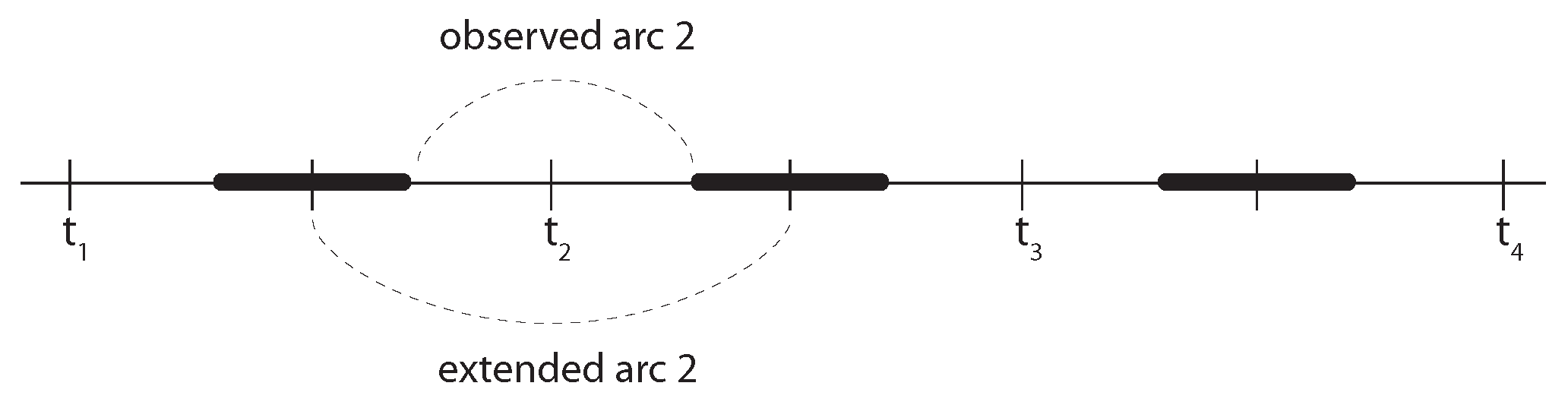
2.3. Pure and Constrained Multi-Arc Strategy
- Global Parameters (): parameters that affect the dynamical equations of every observed (and extended) arc. The PN parameters and the spherical harmonic coefficients of Mercury are an example.
- Local Parameters (): parameters that affect the dynamical equations of a single observed arc k. The state vector of the Mercurycentric orbit associated with the arc and the desaturation manoeuvres applied during the tracking are few examples.
- Local External Parameters (): parameters that affect only the dynamical equations in the period without tracking between two subsequent observed arcs k and . These are the desaturation maneuvres taking place out of the observed arcs.
3. Mathematical Models
- the Eddington parameters β and γ. β accounts for the modification of the non-linear three-body general relativistic interaction and γ parametrizes the velocity-dependent modification of the two-body interaction and accounts also for the space-time curvature through the Shapiro effect [30]. These are the only non-zero PN parameters in GR (they are both equal to unity);
- the Nordtvedt parameter η. The effect of η in the equations of motion is to produce a polarization of the Mercury and Earth orbits in the gravitational field of the other planets and it is related to possible violations of the Strong Equivalence Principle (see, e.g., the discussion in [31]);
- the preferred frame effects parameters and . They phenomenologically describe the effects due to the presence of a gravitationally preferred frame; we follow the standard assumption to identify the preferred frame with the rest frame of the cosmic microwave background [32].
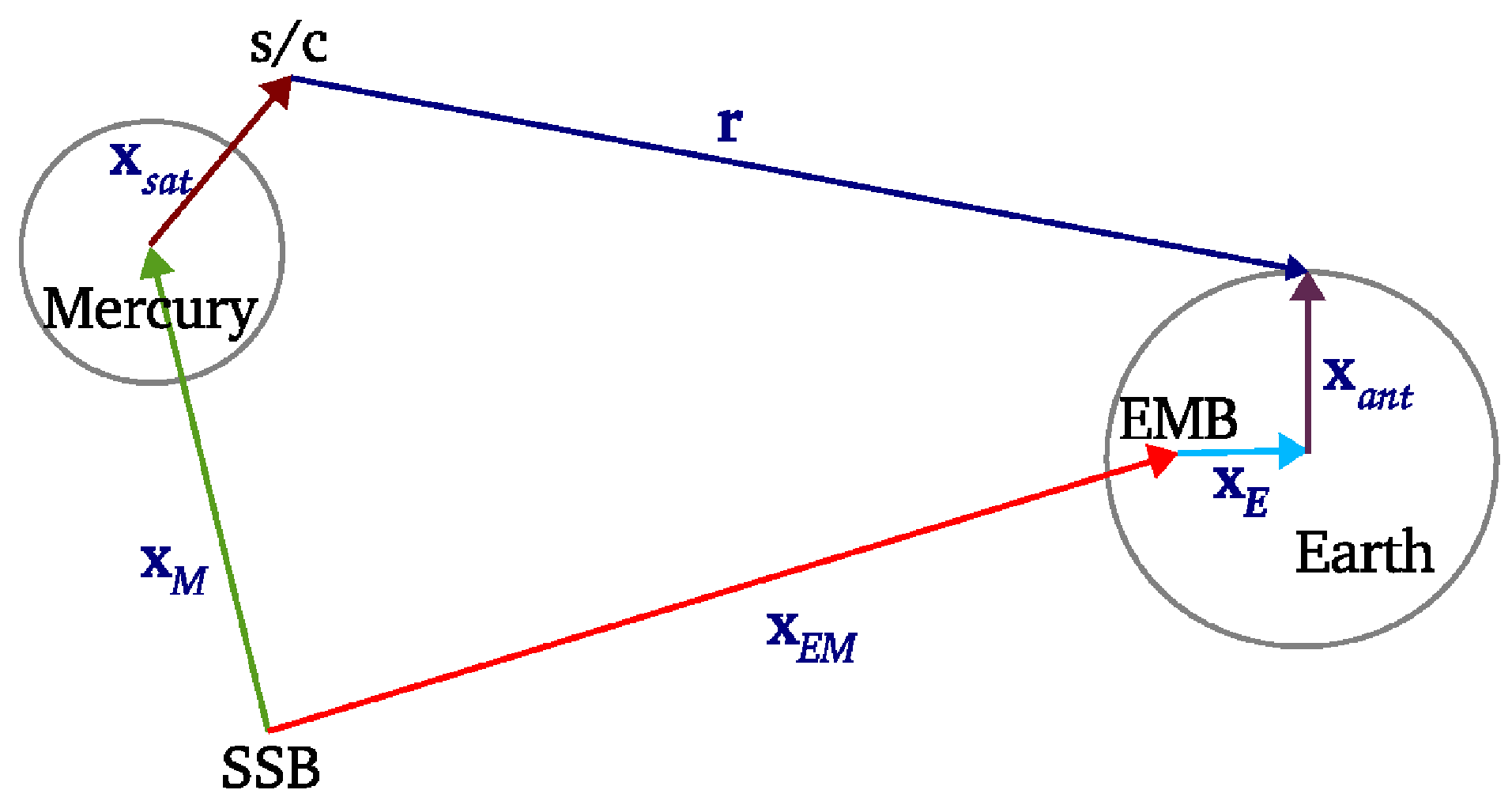
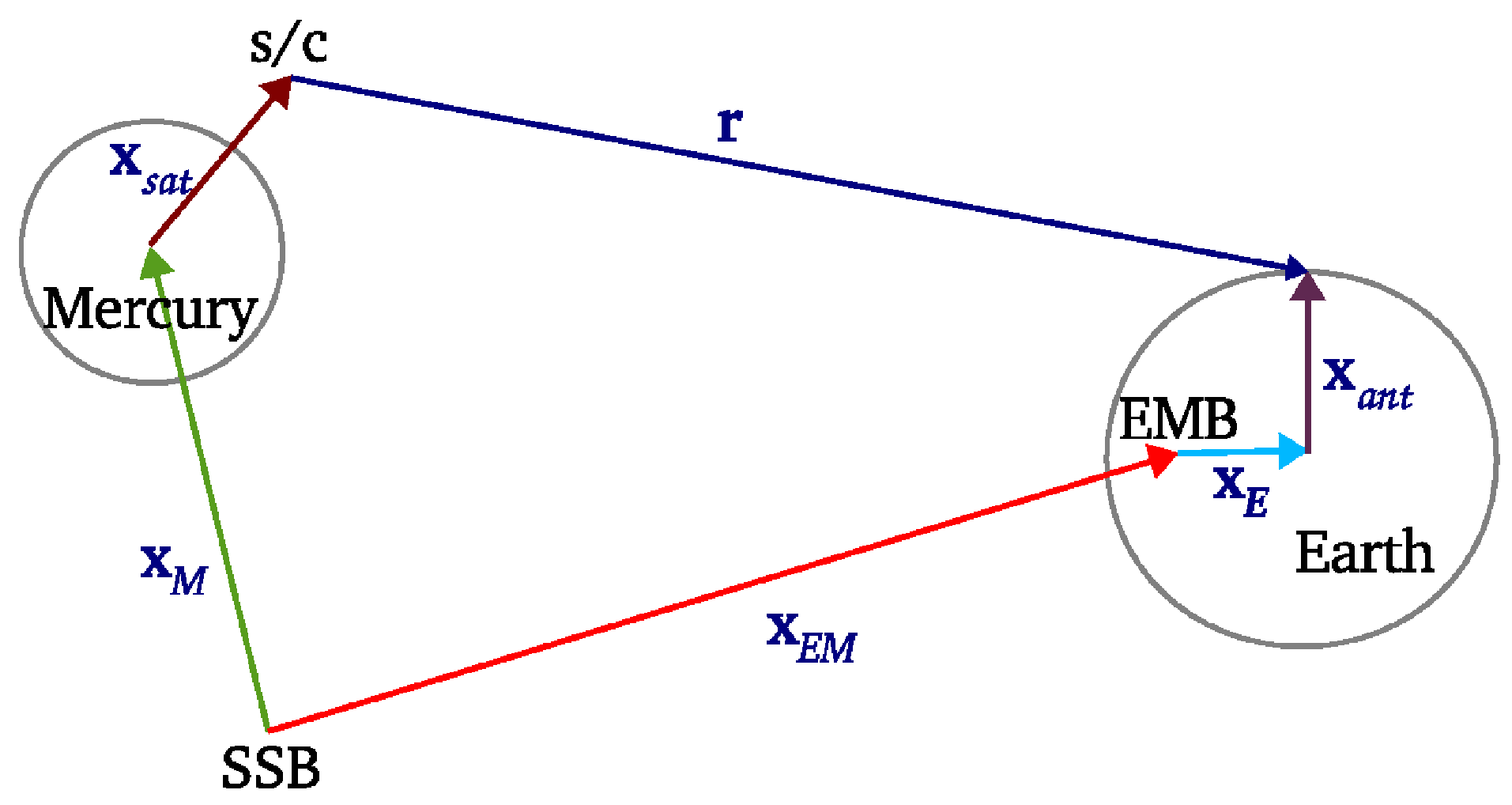
3.1. Computation of Observables
- the Mercurycentric position of the spacecraft, ;
- the SSB positions of Mercury and of the EMB, and ;
- the geocentric position of the ground antenna, ;
- the position of the Earth barycenter with respect to the EMB, .
3.2. Dynamical Relativistic Models
- N-body Newtonian Lagrangian:
- Post-Newtonian General Relativistic Lagrangian:
- Lagrangian for PN parameter γ:
- Lagrangian for PN parameter β:
- Lagrangian for parameter ζ:describes the effect of a time variation of the gravitational parameter of the Sun, :definingwe have:
- Lagrangian for effect:where is the radius of the Sun, is the heliocentric position of body i and is the unit vector along the rotation axis of the Sun. The unit vector is given in standard equatorial coordinates with equinox J2000 at epoch J2000.0 (JD 2451545.0 TCB): , [39].
- Lagrangian for preferred frame effects, PN and :where and is the velocity of the considered reference system with respect to the PN preferred reference frame, which is a reference frame whose outer regions are at rest with respect to the universe rest frame (see [21]). In the case of the SSB reference frame, that could be the one of cosmic microwave background, km/s, in the direction in the Equatorial J2000 reference frame (see [12]). Notice that we can combine the two previous Lagrangians and the parameters and obtaining an unique Lagrangian for the preferred frame effects:
- Lagrangian for possible violation of the equivalence principle, PN η:With the Lagrangian multiplied by G, the Newtonian kinetic energy is:where we assume that the inertial mass and the gravitational mass are the same (or, at least, exactly proportional). If some form of mass has a different gravitational coupling, there are, for each body i, two quantities and , one appearing in the gravitational potential (including the relativistic part) and the other appearing in the kinetic energy. If there is a violation of the strong equivalence principle involving body i, with a fraction of its mass due to gravitational self-energy (for the moment we are using the approximation of constant density: ; notice that is ):with η the PN parameter for this violation. Neglecting terms (and also ) this is expressed by a Lagrangian term , where:
3.3. Mercurycentric Dynamical Model
3.3.1. Mercury Gravity Field (Static Part)
3.3.2. Tidal Perturbations
3.3.3. Sun and Planetary Perturbations
3.3.4. Rotational Dynamics
3.3.5. Non-Gravitational Perturbations
4. Simulation Scenario and Assumptions
4.1. Observables Error Models
4.1.1. Range and Range-Rate
4.1.2. Accelerometer Readings and Calibration Strategy
4.2. Desaturation Maneuvres
4.3. Metric Theories of Gravitation
4.4. Rank Deficiencies in the Mercury and EMB Orbit Determination Problem
5. Results
- Global dynamical:
- -
- PN parameters: β, γ, η, , ;
- -
- other parameters of interest for the relativity experiment: , ζ, ;
- -
- the state vectors of Mercury and EMB (8 components): (); ();
- -
- normalized harmonic coefficients of the gravity field of Mercury up to degree and order 25 and the Love number ;
- -
- rotational parameters: , , , ;
- -
- six accelerometer calibration coefficients for each arc, plus 6+6 boundary conditions;
- Local dynamical:
- -
- state vector of the Mercurycentric orbit of the spacecraft, in the Ecliptic J2000 inertial reference frame, at the central time of each observed arc;
- -
- three dump manoeuvre components, , taking place during tracking, for each observed arc;
- External local dynamical:
- -
- three dump manoeuvre components, , taking place in the period without tracking between each pair of consecutive observed arcs.
5.1. The Relativity Experiment Results
5.2. Results for Gravimetry and Rotation
- relativity simulations: we removed from the solve-for list the gravimetry and rotational parameters, i.e. the gravity field spherical harmonic coefficients, Love number , the angles , the libration amplitudes , ;
- gravimetry and rotation simulations: we removed from the solve-for list the PN and related parameters.
6. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Benkhoff, J.; van Casteren, J.; Hayakawa, H.; Fujimoto, M.; Laakso, H.; Novara, M.; Ferri, P.; Middleton, H.R.; Ziethe, R. BepiColombo-Comprehensive exploration of Mercury: Mission overview and science goals. Planet. Space Sic. 2010, 58, 2–20. [Google Scholar] [CrossRef]
- Mukai, T.; Yamakawa, H.; Hayakawa, H.; Kasaba, Y.; Ogawa, H. Present status of the BepiColombo/Mercury magnetospheric orbiter. Adv. Space Res. 2006, 38, 578–582. [Google Scholar] [CrossRef]
- Iess, L.; Boscagli, G. Advanced radio science instrumentation for the mission BepiColombo to Mercury. Planet. Space Sci. 2001, 49, 1597–1608. [Google Scholar] [CrossRef]
- Milani, A.; Rossi, A.; Vokrouhlický, D.; Villani, D.; Bonanno, C. Gravity field and rotation state of Mercury from the BepiColombo Radio Science Experiments. Planet. Space Sci. 2001, 49, 1579–1596. [Google Scholar] [CrossRef]
- Sanchez Ortiz, N.; Belló Mora, M.; Jehn, R. BepiColombo mission: Estimation of Mercury gravity field and rotation parameters. Acta Astronaut. 2006, 58, 236–242. [Google Scholar] [CrossRef]
- Iess, L.; Asmar, S.; Tortora, P. MORE: An advanced tracking experiment for the exploration of Mercury with the mission BepiColombo. Acta Astronaut. 2009, 65, 666–675. [Google Scholar] [CrossRef]
- Genova, A.; Marabucci, M.; Iess, L. Mercury radio science experiment of the mission BepiColombo. Mem. Soc. Astron. Ital. Suppl. 2012, 20, 127–132. [Google Scholar]
- Schettino, G.; Di Ruzza, S.; De Marchi, F.; Cicalò, S.; Tommei, G.; Milani, A. The radio science experiment with BepiColombo mission to Mercury. Mem. Soc. Astron. Ital. 2016, 87, 24–29. [Google Scholar]
- Cicalò, S.; Milani, A. Determination of the rotation of Mercury from satellite gravimetry. Mon. Not. R. Astron. Soc. 2012, 427, 468–482. [Google Scholar] [CrossRef]
- Cicalò, S.; Schettino, G.; Di Ruzza, S.; Alessi, E.M.; Tommei, G.; Milani, A. The BepiColombo MORE gravimetry and rotation experiments with the ORBIT14 software. Mon. Not. R. Astron. Soc. 2016, 457, 1507–1521. [Google Scholar] [CrossRef]
- Palli, A.; Bevilacqua, A.; Genova, A.; Gherardi, A.; Iess, L.; Meriggiola, R.; Tortora, P. Implementation of an End to End Simulator for the BepiColombo Rotation Experiment. In Proceedings of the European Planetary Space Congress 2012, Madrid, Spain, 23–28 September 2012.
- Milani, A.; Vokrouhlicky, D.; Villani, D.; Bonanno, C.; Rossi, A. Testing general relativity with the BepiColombo Radio Science Experiment. Phys. Rev. D 2002, 66. [Google Scholar] [CrossRef]
- Milani, A.; Tommei, G.; Vokrouhlicky, D.; Latorre, E.; Cicalò, S. Relativistic models for the BepiColombo radioscience experiment. In Relativity in Fundamental Astronomy: Dynamics, Reference Frames, and Data Analysis; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Schettino, G.; Cicalò, S.; Di Ruzza, S.; Tommei, G. The relativity experiment of MORE: Global full-cycle simulation and results. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 141–145.
- Schuster, A.K.; Jehn, R.; Montagnon, E. Spacecraft design impacts on the post-Newtonian parameter estimation. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 82–87.
- Tommei, G.; De Marchi, F.; Serra, D.; Schettino, G. On the Bepicolombo and Juno Radio Science Experiments: Precise models and critical estimates. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 323–328.
- Kaula, W.M. Theory of Satellite Geodesy: Applications of Satellites to Geodesy; Blaisdell: Waltham, MA, USA, 1996. [Google Scholar]
- Kozai, Y. Effects of the tidal deformation of the Earth on the motion of close Earth satellites. Publ. Astron. Soc. Jpn. 1965, 17, 395–402. [Google Scholar]
- Alessi, E.M.; Cicalò, S.; Milani, A. Accelerometer data handling for the BepiColombo orbit determination. In Advances in the Astronautical Science, Proccedings of the 1st IAA Conference on Dynamics and Control of Space Systems, Porto, Portugal, 19–21 March 2012.
- Iafolla, V.; Nozzoli, S. Italian Spring Accelerometer (ISA): A high sensitive accelerometer for BepiColombo ESA Cornerstone. Planet. Space Sci. 2001, 49, 1609–1617. [Google Scholar] [CrossRef]
- Will, C.M. Theory and Experiment in Gravitational Physics; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Tommei, G.; Milani, A.; Vokrouhlicky, D. Light-time computations for the BepiColombo Radio Science Experiment. Celest. Mech. Dyn. Astron. 2010, 107, 285–298. [Google Scholar] [CrossRef]
- Mazarico, E.; Genova, A.; Goossens, S.; Lemoine, F.G.; Neumann, G.A.; Zuber, M.T.; Smith, D.E.; Solomon, S.C. The gravity field, orientation, and ephemeris of Mercury from MESSENGER observations after three years in orbit. J. Geophys. Res. 2014, 119, 2417–2436. [Google Scholar] [CrossRef]
- Jehn, R.; Rocchi, A. BepiColombo Mercury Cornerstone Mission Analysis: The April 2018 Launch Option. MAS Working Paper No. 608; BC-ESC-RP-50013; 24 March 2016; Issue 2.1. Available online: http://issfd.org/ISSFD_2014/ISSFD24_Paper_S6-5_jehn.pdf (accessed on 5 August 2016).
- Milani, A.; Gronchi, G.F. Theory of Orbit Determination; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Folkner, W.M.; Williams, J.G.; Boggs, D.H. The Planetary and Lunar Ephemeris DE 421; JPL Publication: Pasadena, CA, USA, 2008. [Google Scholar]
- Alessi, E.M.; Cicalò, S.; Milani, A.; Tommei, G. Desaturation Manoeuvres and Precise Orbit Determination for the BepiColombo Mission. Mon. Not. R. Astron. Soc. 2012, 423, 2270–2278. [Google Scholar] [CrossRef] [Green Version]
- Bonanno, C.; Milani, A. Symmetries and rank deficiency in the orbit determination around another planet. Celest. Mech. Dyn. Astron. 2002, 83, 17–33. [Google Scholar] [CrossRef]
- Will, C.M. The Confrontation between General Relativity and Experiment. Living Rev. Relativ. 2014, 17, 1–117. [Google Scholar] [CrossRef]
- Shapiro, I.I. Fourth Test of General Relativity. Phys. Rev. Lett. 1964, 13, 789–791. [Google Scholar] [CrossRef]
- De Marchi, F.; Tommei, G.; Milani, A.; Schettino, G. Constraining the Nordtvedt parameter with the BepiColombo Radioscience experiment. Phys. Rev. D 2016, 93, 123014. [Google Scholar] [CrossRef]
- Peebles, P.J.E. Principles of Physical Cosmology; Princeton University Press: Princeton, NJ, USA, 1993. [Google Scholar]
- Klioner, S.A. Relativistic scaling of astronomical quantities and the system of astronomical units. Astron. Astrophys. 2008, 478, 951–958. [Google Scholar] [CrossRef]
- Klioner, S.A.; Capitaine, N.; Folkner, W.; Guinot, B.; Huang, T.Y.; Kopeikin, S.; Petit, G.; Pitjeva, E.; Seidelmann, P.K.; Soffel, M. Units of Relativistic Time Scales and Associated Quantities. In Relativity in Fundamental Astronomy: Dynamics, Reference Frames, and Data Analysis; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Moyer, T.D. Formulation for Observed and Computed Values of Deep Space Network Data Types for Navigation, NASA-JPL, Deep Space Communication and Navigation Series, Monograph 2; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Soffel, M.; Klioner, S.A.; Petit, G.; Wolf, P.; Kopeikin, S.M.; Bretagnon, P.; Brumberg, V.A.; Capitaine, N.; Damour, T.; Fukushima, T. The IAU Resolutions for Astrometry, Celestial Mechanics, and Metrology in the Relativistic Framework: Explanatory Supplement. Astron. J. 2003, 126, 2687–2706. [Google Scholar] [CrossRef]
- Irwin, A.W.; Fukushima, T. A numerical time ephemeris of the Earth. Astron. Astrophys. 1999, 348, 642–652. [Google Scholar]
- Damour, T.; Soffel, M.; Hu, C. General-relativistic celestial mechanics. IV. Theory of satellite motion. Phys. Rev. D 1994, 49, 618–635. [Google Scholar] [CrossRef]
- Archinal, B.A.; A’Hearn, M.F.; Bowell, E.; Conrad, A.; Consolmagno, G.J.; Courtin, R.; Fukushima, T.; Hestroffer, D.; Hilton, J.L.; Krasinskyet, G.A.; et al. Report of the IAU Working Group on Cartographic Coordinates and Rotational Elements: 2009. Celest. Mech. Dyn. Astron. 2011, 2, 101–135. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E. Satellite Orbits: Models, Methods and Applications; Springer: Berlin, Germany, 2005. [Google Scholar]
- Padovan, S.; Margot, J.-L.; Hauck, S.A., II; Moore, W.B.; Solomon, S.C. The tides of Mercury and possible implications for its interior structure. J. Geophys. Res. 2014, 119, 850–866. [Google Scholar] [CrossRef]
- Roy, A.E. Orbital Motion, 4th ed.; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Peale, S.J. The Rotational Dynamics of Mercury and the State of Its Core; University Arizona press: Tucson, AZ, USA, 1988; pp. 461–493. [Google Scholar]
- Peale, S.J. The proximity of Mercury’s spin to Cassini state 1 from adiabatic invariance. Icarus 2006, 181, 338–347. [Google Scholar] [CrossRef]
- Yseboodt, M.; Margot, J.L.; Peale, S.J. Analytical model of the long-period forced longitude librations of Mercury. Icarus 2010, 207, 536–544. [Google Scholar] [CrossRef] [Green Version]
- Yseboodt, M.; Rivoldini, A.; Van Hoolst, T.; Dumberry, M. Influence of an inner core on the long-period forced librations of Mercury. Icarus 2013, 226, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Stark, A.; Oberst, J.; Preusker, F.; Peale, S.J.; Margot, J.-L.; Phillips, R.J.; Neumann, G.A.; Smith, D.E.; Zuber, M.T.; Solomon, S.C. First MESSENGER orbital observations of Mercury’s librations. Geophys. Res. Lett. 2015, 42, 7881–7889. [Google Scholar] [CrossRef]
- Bertotti, B.; Iess, L.; Tortora, P. A test of general relativity using radio links with the Cassini spacecraft. Nature 2003, 425, 374–376. [Google Scholar] [CrossRef] [PubMed]
- Imperi, L.; Iess, L. Testing general relativity during the cruise phase of the BepiColombo mission to Mercury. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015.
- Schettino, G.; Imperi, L.; Iess, L.; Tommei, G. Sensitivity study of systematic errors in the BepiColombo relativity experiment. In Proceedings of the Metrology for Aerospace (MetroAeroSpace), Florence, Italy, 22–23 June 2016. in press.
- Nordtvedt, K.J. Post-Newtonian Metric for a General Class of Scalar-Tensor Gravitational Theories and Observational Consequences. Astrophys. J. 1970, 161, 1059–1067. [Google Scholar] [CrossRef]
- Fienga, A.; Laskar, J.; Exertier, P.; Manche, H.; Gastineau, M. Numerical estimation of the sensitivity of INPOP planetary ephemerides to general relativity parameters. Celest. Mech. Dyn. Astron. 2015, 123, 325–349. [Google Scholar] [CrossRef]
- Williams, J.G.; Turyshev, S.G.; Boggs, D.H. Lunar Laser Ranging Tests of the Equivalence Principle with the Earth and Moon. Int. J. Mod. Phys. D 2009, 18, 1129–1175. [Google Scholar] [CrossRef]
- Iorio, L. Constraining the Preferred-Frame α1, α2 Parameters from Solar System Planetary Precessions. Int. J. Mod. Phys. D 2014, 23, 1450006. [Google Scholar] [CrossRef]
- Pitjeva, E.V. Determination of the Value of the Heliocentric Gravitational Constant (GM⊙) from Modern Observations of Planets and Spacecraft. J. Phys. Chem. Ref. Data 2015, 44, 031210. [Google Scholar] [CrossRef]
- The Value has Been Obtained from Latest JPL Ephemerides and Has Been Published on the NASA HORIZONS Web-Interface. Available online: http://ssd.jpl.nasa.gov/?constants (accessed on 5 August 2016).
- Pitjeva, E.V.; Pitjev, N.P. Relativistic effects and dark matter in the Solar system from observations of planets and spacecraft. Mon. Not. R. Astron. Soc. 2013, 432, 3431–3437. [Google Scholar] [CrossRef]
- Iorio, L.; Lichtenegger, H.I.M.; Ruggiero, M.L.; Corda, C. Phenomenology of the Lense-Thirring effect in the solar system. Astrophys. Space Sci. 2011, 331, 351–395. [Google Scholar] [CrossRef]
- Flamini, E.; Capaccioni, F.; Colangeli, L.; Cremonese, G.; Doressoundiram, A.; Josset, J.L.; Langevin, L.; Debei, S.; Capria, M.T.; De Sanctis, M.C.; et al. SIMBIO-SYS: The spectrometer and imagers integrated observatory system for the BepiColombo planetary orbiter. Planet. Space Sci. 2010, 58, 125–143. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Formal Error | True Error | T/F Error Ratio | Current Accuracy |
|---|---|---|---|---|
| β | 3.6 | [52] | ||
| γ | 1.2 | [48] | ||
| η | 4.9 | [53] | ||
| 1.0 | [54] | |||
| 1.2 | [54] | |||
| 1.0 | , [55,56] | |||
| ζ | 1.5 | [57] | ||
| 1.0 | [52] |
| β | γ | η | ζ | |||||
|---|---|---|---|---|---|---|---|---|
| 0.15 | 0.21 | 0.11 | 0.90 | 0.29 | 0.89 | 0.10 | – | |
| ζ | <0.1 | 0.28 | <0.1 | <0.1 | 0.17 | <0.1 | – | |
| 0.20 | 0.14 | 0.14 | 0.84 | <0.1 | – | |||
| 0.35 | 0.28 | 0.36 | 0.27 | – | ||||
| 0.35 | 0.12 | 0.22 | – | |||||
| η | 0.96 | 0.60 | – | |||||
| γ | 0.77 | – | ||||||
| β | – |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schettino, G.; Tommei, G. Testing General Relativity with the Radio Science Experiment of the BepiColombo mission to Mercury. Universe 2016, 2, 21. https://doi.org/10.3390/universe2030021
Schettino G, Tommei G. Testing General Relativity with the Radio Science Experiment of the BepiColombo mission to Mercury. Universe. 2016; 2(3):21. https://doi.org/10.3390/universe2030021
Chicago/Turabian StyleSchettino, Giulia, and Giacomo Tommei. 2016. "Testing General Relativity with the Radio Science Experiment of the BepiColombo mission to Mercury" Universe 2, no. 3: 21. https://doi.org/10.3390/universe2030021
APA StyleSchettino, G., & Tommei, G. (2016). Testing General Relativity with the Radio Science Experiment of the BepiColombo mission to Mercury. Universe, 2(3), 21. https://doi.org/10.3390/universe2030021