
High-Durability Photothermal Slippery Surfaces for Droplet Manipulation Based on Ultraviolet Lithography

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
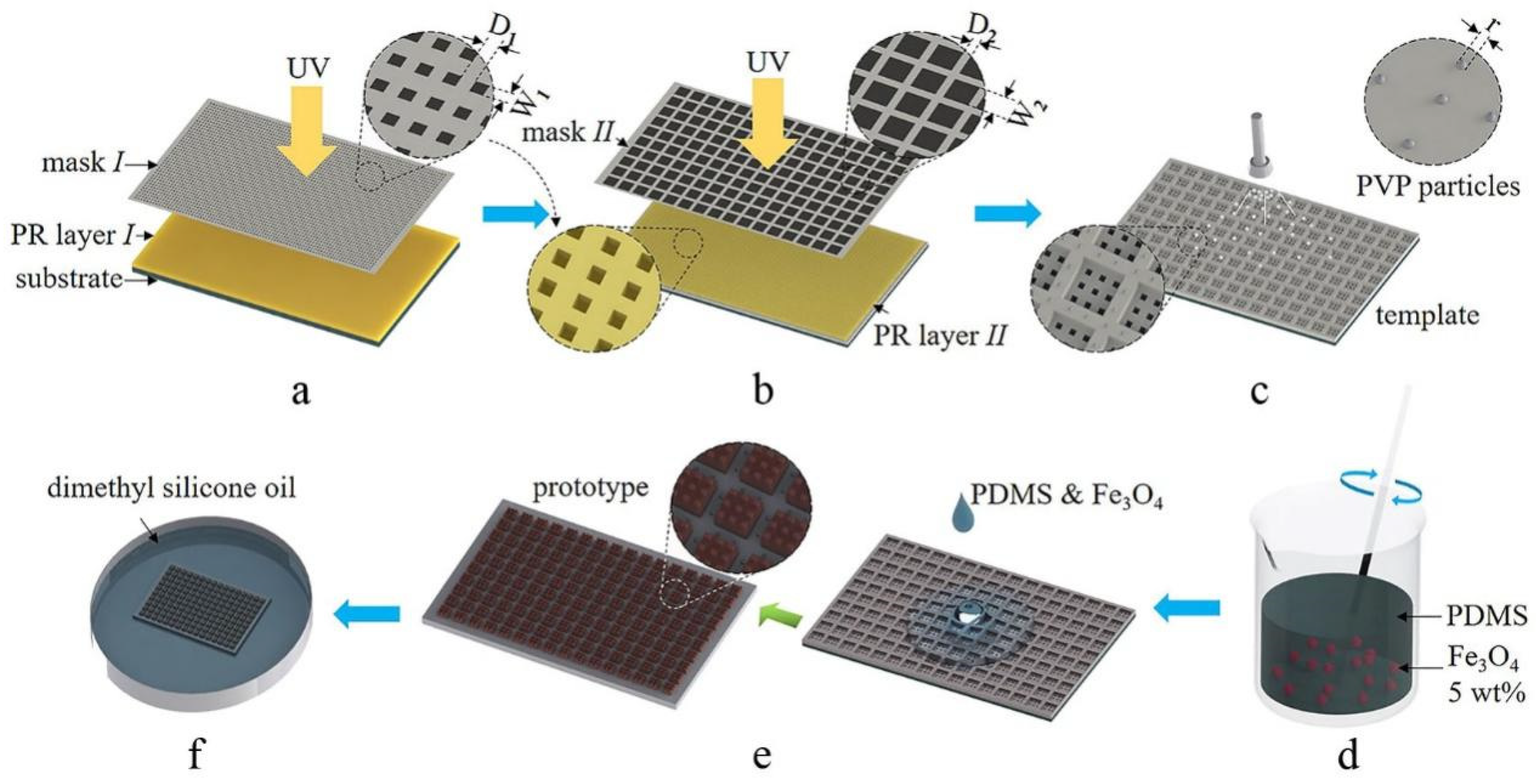
2. Method
2.1. UV Lithography
2.2. Template Modifying
2.3. Photothermal Colloid Preparation
2.4. Reserve Molding and Infusion
3. Results
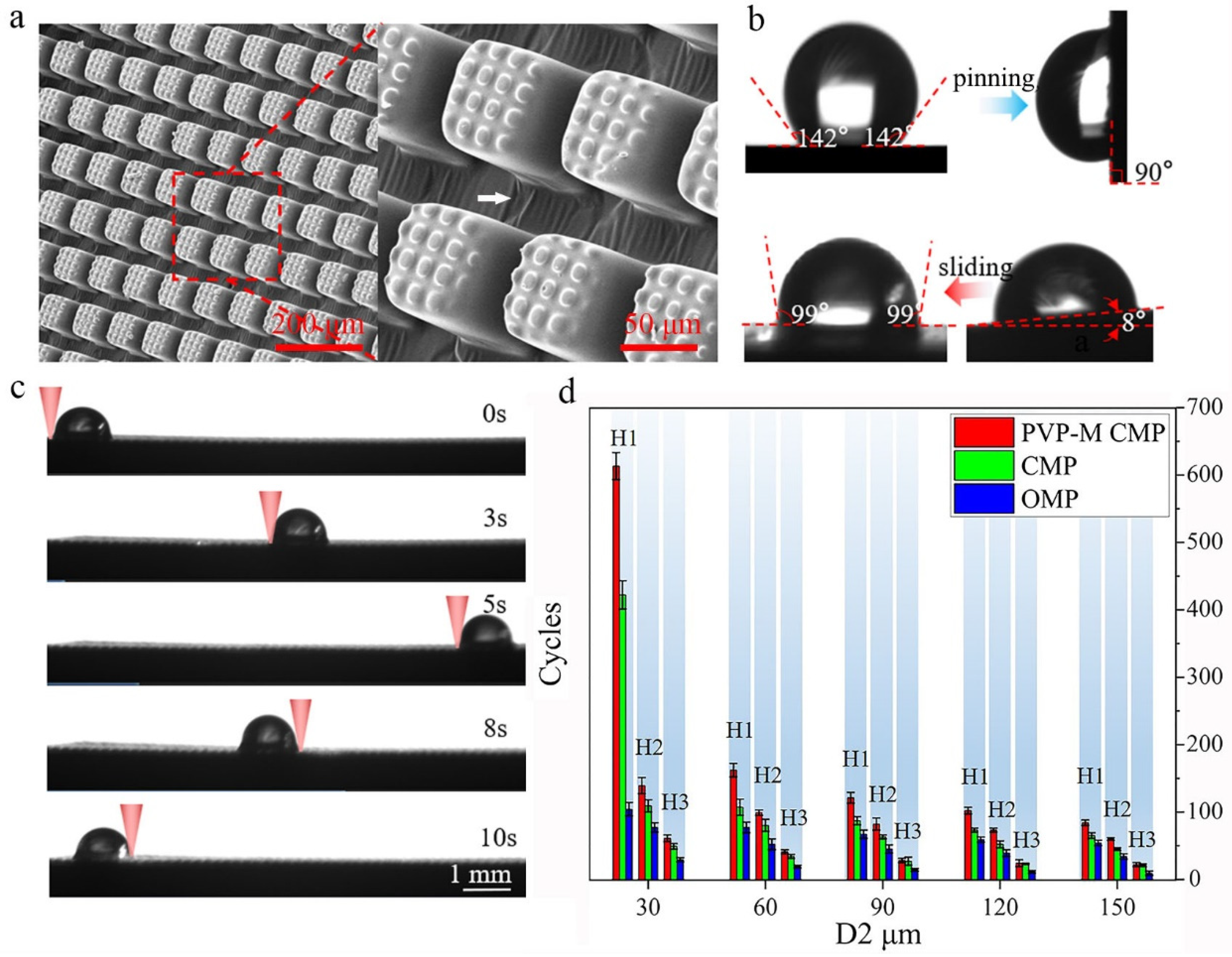
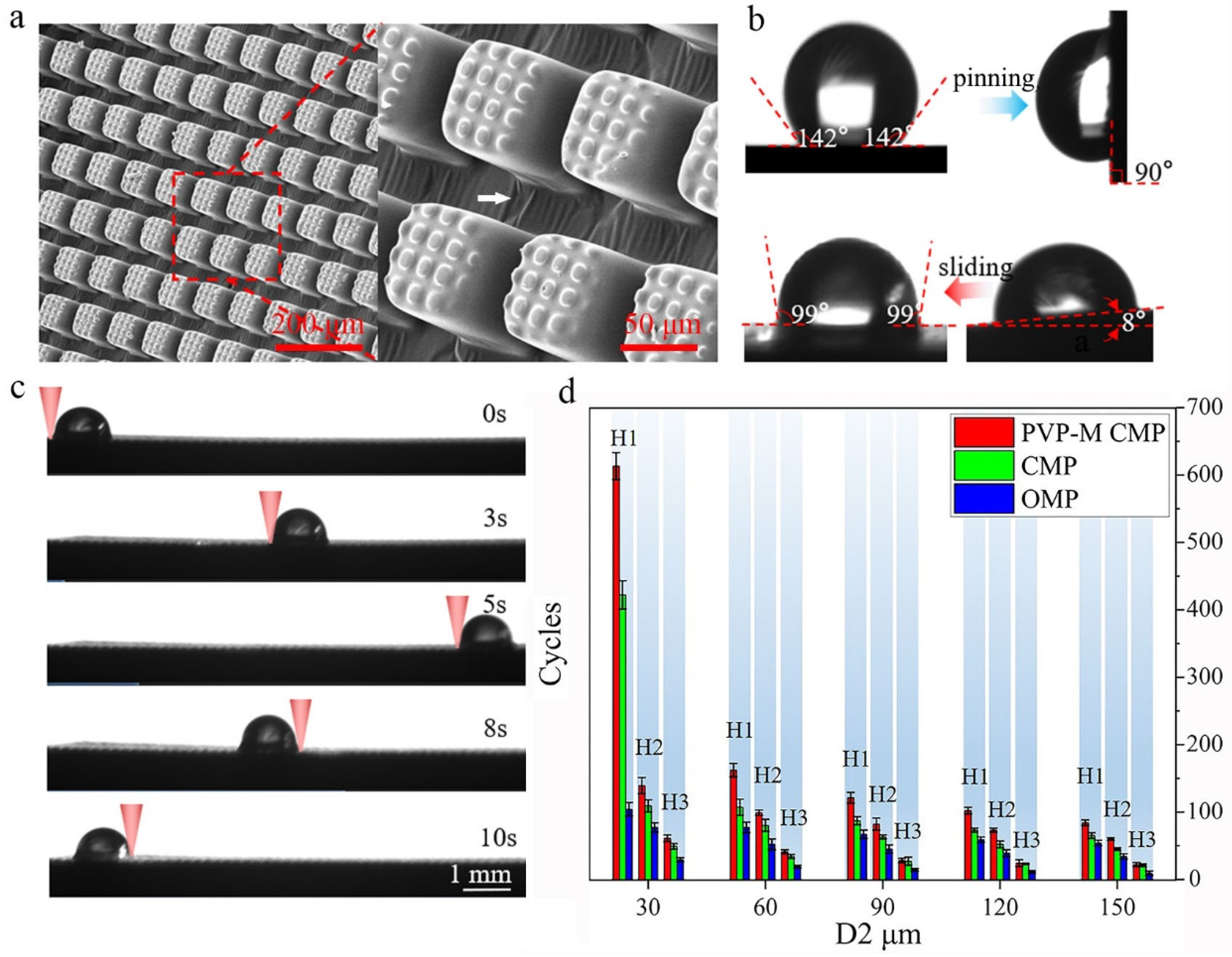
3.1. Characteristics of HD-PTSS
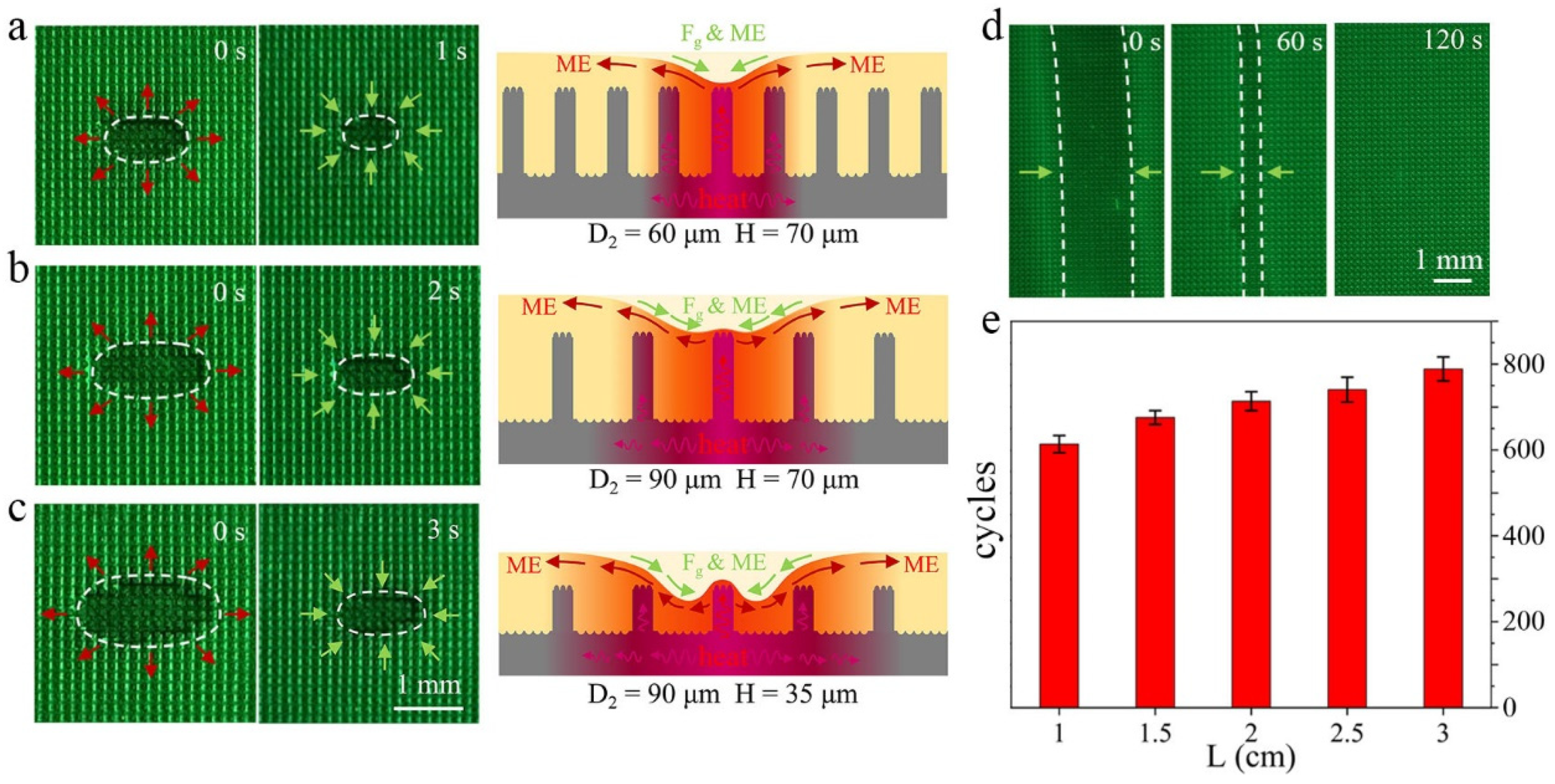
3.2. Influence of Morphologic Parameters on HD-PTSS Durability
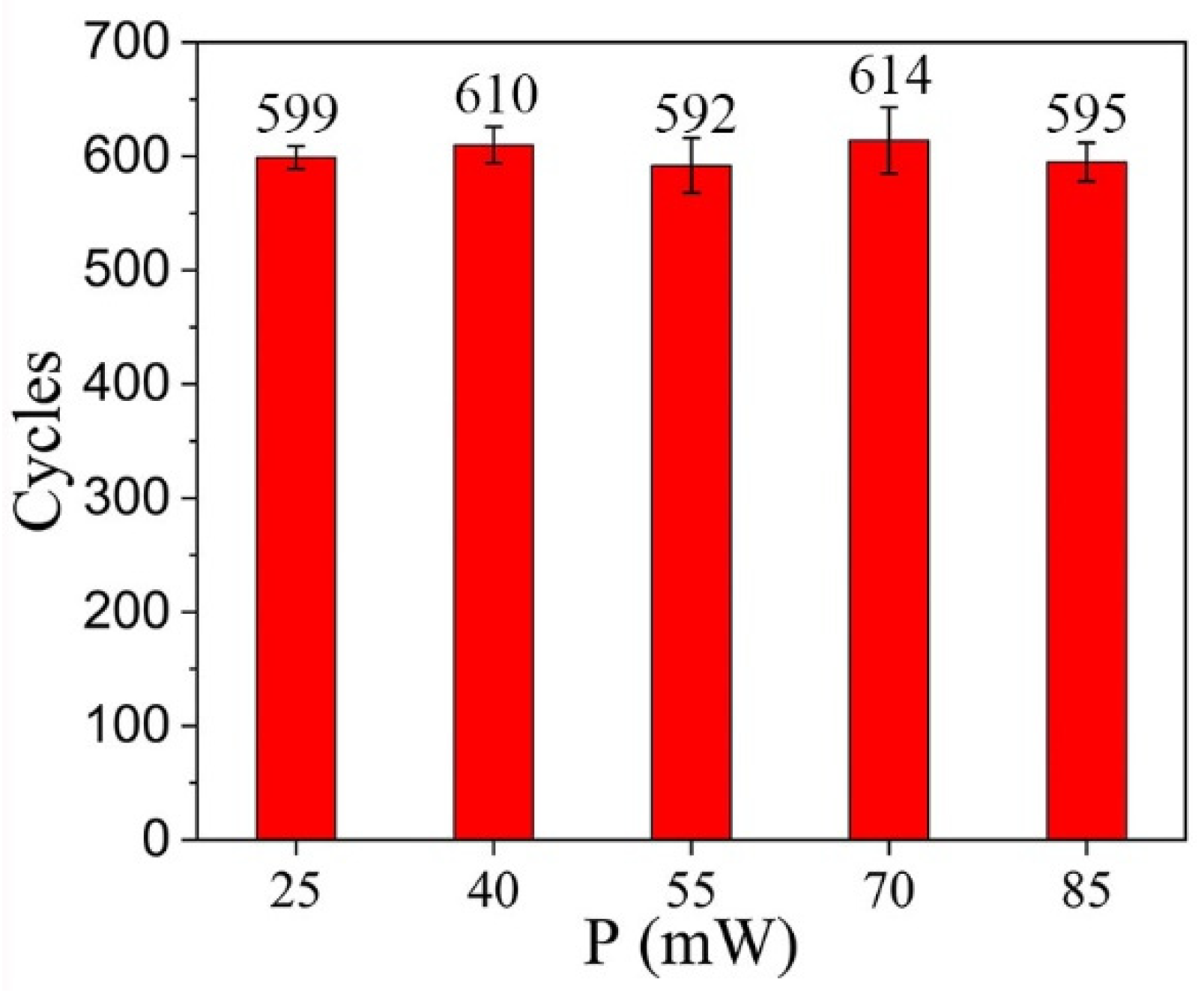
3.3. Instantaneous Response Time and Durability with Different Laser Power
4. Discussion
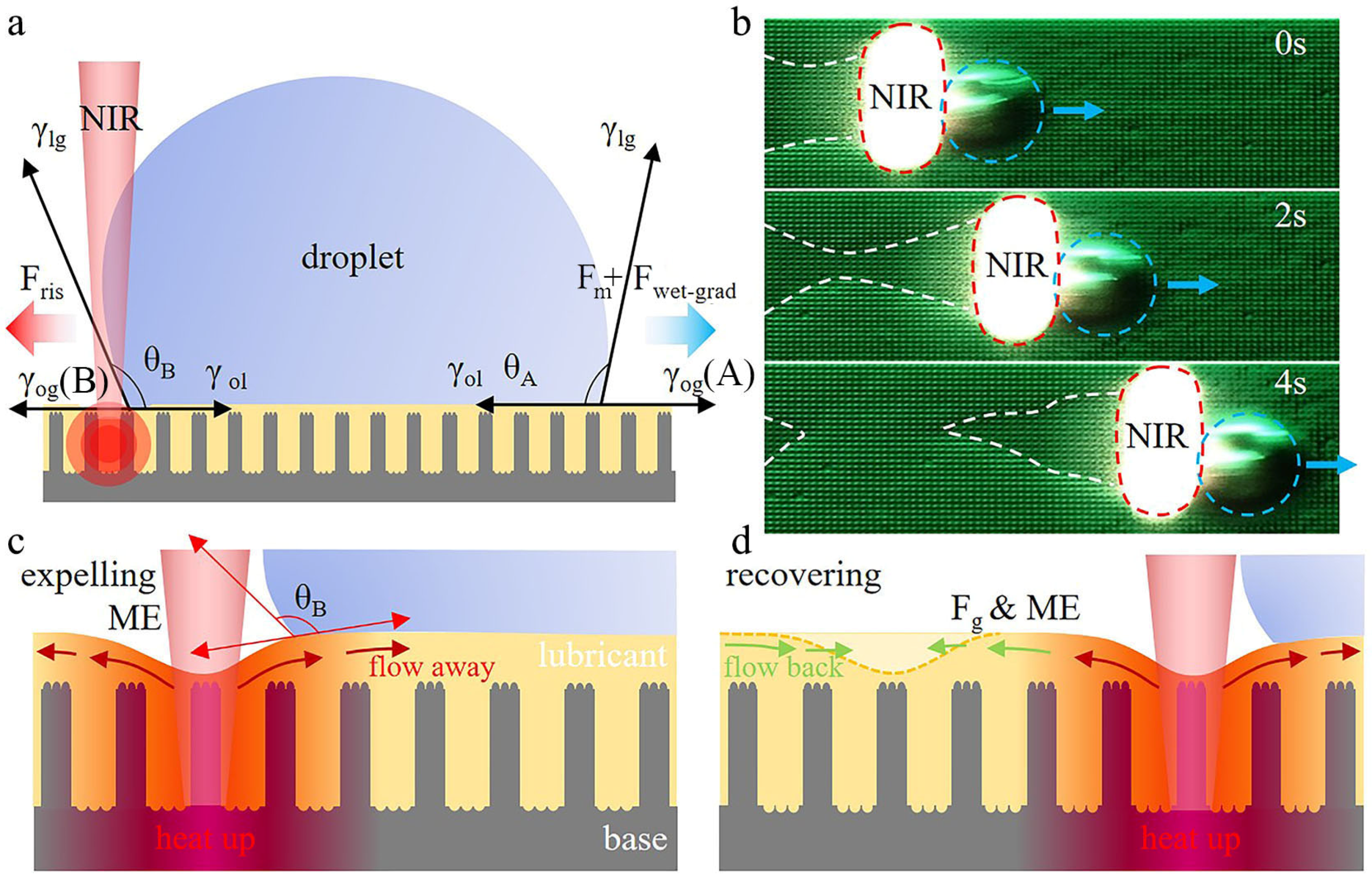
4.1. Mechanism of Droplet Photothermal Manipulation with HD-PTSS
4.2. Flexible Control of Droplets by HD-PTSS
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Paik, P.; Pamula, V.; Pollack, M.; Fair, R. Electrowetting-based droplet mixers for microfluidic systems. Lab Chip 2003, 3, 28–33. [Google Scholar] [CrossRef] [PubMed]
- Sohrabi, S.; Kassir, N.; Moraveji, M. Droplet microfluidics: Fundamentals and its advanced applications. RSC Adv. 2020, 10, 27560–27574. [Google Scholar] [CrossRef] [PubMed]
- Zhu, P.; Wang, L. Passive and active droplet generation with microfluidics: A review. Lab Chip 2017, 17, 34–75. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Li, S.; Guo, Y.; Zeng, X.; Liu, B. A review on microfluidics manipulation of the extracellular chemical microenvironment and its emerging application to cell analysis. Anal. Chim. Acta 2020, 1125, 94–113. [Google Scholar] [CrossRef] [PubMed]
- Irajizad, P.; Ray, S.; Farokhnia, N.; Hasnain, M.; Baldelli, S.; Ghasemi, H. Remote Droplet Manipulation on Self-Healing Thermally Activated Magnetic Slippery Surfaces. Adv. Mater. Interfaces 2017, 4, 1700009. [Google Scholar] [CrossRef]
- Kanitthamniyom, P.; Zhou, A.; Feng, S.; Liu, A.; Vasoo, S.; Zhang, Y. A 3D-printed modular magnetic digital microfluidic architecture for on-demand bioanalysis. Microsyst. Nanoeng. 2020, 6, 48. [Google Scholar] [CrossRef]
- Tang, X.; Wang, L. Loss-Free Photo-Manipulation of Droplets by Pyroelectro-Trapping on Superhydrophobic Surfaces. ACS Nano 2018, 12, 8994–9004. [Google Scholar] [CrossRef]
- Wang, X.; Huang, Z.; Miao, D.; Zhao, J.; Yu, J.; Ding, B. Biomimetic Fibrous Murray Membranes with Ultrafast Water Transport and Evaporation for Smart Moisture-Wicking Fabrics. Acs Nano 2019, 13, 1060–1070. [Google Scholar] [CrossRef]
- Quere, D. Wetting and roughness. Annu. Rev. Mater. Res. 2008, 38, 71–99. [Google Scholar] [CrossRef]
- Sun, T.; Feng, L.; Gao, X.; Jiang, L. Bioinspired surfaces with special wettability. Acc. Chem. Res. 2006, 39, 487. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, A.; Ganguly, R.; Schutzius, T.; Megaridis, C. Wettability patterning for high-rate, pumpless fluid transport on open, non-planar microfluidic platforms. Lab Chip 2014, 14, 1538–1550. [Google Scholar] [CrossRef] [PubMed]
- Shang, L.; Yu, Y.; Gao, W.; Wang, Y.; Qu, L.; Zhao, Z.; Chai, R.; Zhao, Y. Bio-Inspired Anisotropic Wettability Surfaces from Dynamic Ferrofluid Assembled Templates. Adv. Funct. Mater. 2018, 28, 1705802. [Google Scholar] [CrossRef]
- Su, X.; Li, H.; Lai, X.; Zhang, L.; Liao, X.; Wang, J.; Chen, Z.; He, J.; Zeng, X. Dual-Functional Superhydrophobic Textiles with Asymmetric Roll-Down/Pinned States for Water Droplet Transportation and Oil-Water Separation. ACS Appl. Mater. Interfaces 2018, 10, 4213–4221. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Wu, L.; Li, G. Magnetically Responsive Superhydrophobic Surface: In Situ Reversible Switching of Water Droplet Wettability and Adhesion for Droplet Manipulation. ACS Appl. Mater. Interfaces 2018, 10, 20150–20158. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Kong, Z.; Xiao, G.; Teng, C.; Li, Y.; Ren, G.; Wang, S.; Zhu, Y.; Jiang, L. Polypyrrole Whelk-Like Arrays toward Robust Controlling Manipulation of Organic Droplets Underwater. Small 2017, 13, 170938. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Heng, L.; Jiang, L. Effect of lubricant viscosity on the self-healing properties and electrically driven sliding of droplets on anisotropic slippery surfaces. J. Mater. Chem. A 2018, 6, 3414–3421. [Google Scholar] [CrossRef]
- Bai, X.; Yong, J.; Shan, C.; Fang, Y.; Hou, X.; Chen, F. Remote, selective, and in situ manipulation of liquid droplets on a femtosecond laser-structured superhydrophobic shape-memory polymer by near-infrared light. Sci. China Chem. 2021, 64, 861–872. [Google Scholar] [CrossRef]
- Chen, C.; Huan, Z.; Jiao, Y.; Shi, L.; Zhang, Y.; Li, J.; Li, C.; Lv, X.; Wu, S.; Hu, Y.; et al. In Situ Reversible Control between Sliding and Pinning for Diverse Liquids under Ultra-Low Voltage. Acs Nano 2019, 13, 5742–5752. [Google Scholar] [CrossRef]
- Chen, C.; Huang, Z.; Shi, L.; Jiao, Y.; Zhu, S.; Li, J.; Hu, Y.; Chu, J.; Wu, D.; Lang, L. Remote Photothermal Actuation of Underwater Bubble toward Arbitrary Direction on Planar Slippery Fe3O4-Doped Surfaces. Adv. Funct. Mater. 2019, 29, 5742–5752. [Google Scholar] [CrossRef]
- Gao, C.; Wang, L.; Lin, Y.; Li, J.; Liu, Y.; Li, X.; Feng, S.; Zheng, Y. Droplets Manipulated on Photothermal Organogel Surfaces. Adv. Funct. Mater. 2018, 28, 1803072. [Google Scholar] [CrossRef]
- Li, Q.; Wu, D.; Guo, Z. Drop/bubble transportation and controllable manipulation on patterned slippery lubricant infused surfaces with tunable wettability. Soft Matter. 2019, 15, 6803–6810. [Google Scholar] [CrossRef]
- Wang, J.; Gao, W.; Zhang, H.; Zou, M.; Chen, Y.; Zhao, Y. Programmable wettability on photocontrolled graphene film. Sci. Adv. 2018, 4, eaat7392. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Zhou, L.; Chen, C.; Shi, L.-A.; Zhu, S.; Zhang, C.; Meng, D.; Huang, Z.; Li, J.; Hu, Y.; et al. Photothermal Actuation of Diverse Liquids on an Fe3O4-Doped Slippery Surface for Electric Switching and Cell Culture. Langmuir 2019, 35, 13915–13922. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.; Zhang, L.; Lao, J.; Luo, K.; Liu, X.; Sui, K.; Gao, J.; Jiang, L. Reliable and Low Temperature Actuation of Water and Oil Slugs in Janus Photothermal Slippery Tube. ACS Appl. Mater. Interfaces 2022, 14, 17968–17974. [Google Scholar] [CrossRef] [PubMed]
- Kalova, J.; Mares, R. The Temperature Dependence of the Surface Tension of Water. AIP Conf. Proc. 2018, 2047, 020007. [Google Scholar] [CrossRef]
- Li, C.; Wang, Y.; Xu, W.; Li, C.; Yang, R.; Zhang, H. Spreading and shrinking behaviors of oil films with different viscosities on a cold immiscible liquid substrate. Colloids Surf. A Physicochem. Eng. Asp. 2022, 654, 130086. [Google Scholar] [CrossRef]
- Smith, J.; Dhiman, R.; Anand, S.; Reza-Garduno, E. Droplet mobility on lubricant-impregnated surfaces. Soft Matter. 2013, 9, 1772. [Google Scholar] [CrossRef] [Green Version]
- Chaudhury, M.; Whitesides, G. How to make water run uphill. Science 1992, 256, 1539–1541. [Google Scholar] [CrossRef]
- Nikolov, A.; Wasan, D.; Chengara, A.; Koczo, K.; Policello, G.; Kolossvary, I. Superspreading driven by Marangoni flow. Adv. Colloid Interface Sci. 2002, 96, 325–338. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, T.; Zhang, C.; Gong, Y.; Liu, Z.; Zhao, W.; Zhan, Y.; Zhang, C.; Wang, K.; Bai, J. High-Durability Photothermal Slippery Surfaces for Droplet Manipulation Based on Ultraviolet Lithography. Polymers 2023, 15, 1132. https://doi.org/10.3390/polym15051132
Wen T, Zhang C, Gong Y, Liu Z, Zhao W, Zhan Y, Zhang C, Wang K, Bai J. High-Durability Photothermal Slippery Surfaces for Droplet Manipulation Based on Ultraviolet Lithography. Polymers. 2023; 15(5):1132. https://doi.org/10.3390/polym15051132
Chicago/Turabian StyleWen, Tong, Chen Zhang, Yanyan Gong, Zezhi Liu, Wei Zhao, Yongjie Zhan, Ce Zhang, Kaige Wang, and Jintao Bai. 2023. "High-Durability Photothermal Slippery Surfaces for Droplet Manipulation Based on Ultraviolet Lithography" Polymers 15, no. 5: 1132. https://doi.org/10.3390/polym15051132
APA StyleWen, T., Zhang, C., Gong, Y., Liu, Z., Zhao, W., Zhan, Y., Zhang, C., Wang, K., & Bai, J. (2023). High-Durability Photothermal Slippery Surfaces for Droplet Manipulation Based on Ultraviolet Lithography. Polymers, 15(5), 1132. https://doi.org/10.3390/polym15051132